JP2009298317A - トー角制御装置及び車両用サスペンション装置 - Google Patents
トー角制御装置及び車両用サスペンション装置 Download PDFInfo
- Publication number
- JP2009298317A JP2009298317A JP2008155768A JP2008155768A JP2009298317A JP 2009298317 A JP2009298317 A JP 2009298317A JP 2008155768 A JP2008155768 A JP 2008155768A JP 2008155768 A JP2008155768 A JP 2008155768A JP 2009298317 A JP2009298317 A JP 2009298317A
- Authority
- JP
- Japan
- Prior art keywords
- toe angle
- link member
- stroke
- toe
- road surface
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

Landscapes
- Steering-Linkage Mechanisms And Four-Wheel Steering (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Vehicle Body Suspensions (AREA)
- Power Steering Mechanism (AREA)
Abstract
【課題】凹凸路面走行時などの路面外乱時のトー角変化を左右輪個別に調整可能とするトー角制御装置を提供する。
【解決手段】タイロッド10に対し、長さを変更するためのトー角制御装置12を設ける。トー角制御装置12は、タイロッド10の軸方向途中をねじ機構として長さを変更可能とし、そのねじ機構を構成する雄ねじ部を回転変位させるトー角調整用アクチュエータを設ける。また、ストローク状態量計測装置20を備える。ストローク状態量計測装置20は、サスペンションストローク量及びストローク速度を検出する為に、車体に対するアクスル中心(ホイルセンタ)の相対的な上下変化量を検出する。検出した計測情報をストローク状態量演算手段に出力する。なお、ストローク状態量演算手段は、トー角制御コントローラ内に設ける。
【選択図】図1
【解決手段】タイロッド10に対し、長さを変更するためのトー角制御装置12を設ける。トー角制御装置12は、タイロッド10の軸方向途中をねじ機構として長さを変更可能とし、そのねじ機構を構成する雄ねじ部を回転変位させるトー角調整用アクチュエータを設ける。また、ストローク状態量計測装置20を備える。ストローク状態量計測装置20は、サスペンションストローク量及びストローク速度を検出する為に、車体に対するアクスル中心(ホイルセンタ)の相対的な上下変化量を検出する。検出した計測情報をストローク状態量演算手段に出力する。なお、ストローク状態量演算手段は、トー角制御コントローラ内に設ける。
【選択図】図1
Description
本発明は、車輪を車体に懸架するサスペンション装置に関する技術である。
従来の車両用サスペンション装置としては、例えば特許文献1に記載のサスペンション装置がある。このサスペンション装置は、ロアアームを車幅方向に変位させて、キャンバー角を制御する。同時に、スアクチュエータでステアリングラックを車幅方向に変位させることで、トー角を変更する。
特開2001−130427号公報
上記従来技術では、左右の車輪のトー角が同時に且つ反対方向に変更する。すなわち、左右輪のトー角を独立して制御することが出来ない。例えば、凹凸路面走行時によるバウンスに対して、左右輪のトー角変化を共に抑えるような制御を行うことが出来ない。
本発明は、上記のような点に着目してなされたもので、凹凸路面走行時などの路面外乱時のトー角変化を左右輪個別に調整可能とすることを課題とする。
本発明は、上記のような点に着目してなされたもので、凹凸路面走行時などの路面外乱時のトー角変化を左右輪個別に調整可能とすることを課題とする。
上記課題を解決するために、本発明は、車輪支持部材を車体側部材に対して上下揺動可能に連結するリンク部材の少なくとも1つのリンク部材の長さを変更するためのトー角調整用アクチュエータを設ける。トー角調整用アクチュエータは、上記リンク部材の途中をねじ機構として長さを変更可能とし、そのねじ機構を構成する雄ねじ部若しくは雌ねじを回転変位させることでトー角を変更する。
本発明によれば、各車輪のトー角を個別に変更可能となる。これによって、凹凸路面走行時などの路面外乱時のトー角変化を左右輪個別に調整可能となる。
次に、本発明の実施形態について図面を参照しつつ説明する。
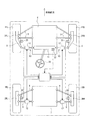
図1は、本実施形態に係る車両の模式図である。すなわち、左右前輪1FL、1FRと左右後輪1RL、1RRを備える。また、本実施形態では、左右前輪1FL、1FRを操舵輪とする。
各アクスル2FL〜2RRが、各車輪1FL〜1RRを回転自在に支持する。各アクスル2FL〜2RRは、サスペンションリンク3,4,5を介して車体側部材6,7に上下揺動可能に連結する。
図1は、本実施形態に係る車両の模式図である。すなわち、左右前輪1FL、1FRと左右後輪1RL、1RRを備える。また、本実施形態では、左右前輪1FL、1FRを操舵輪とする。
各アクスル2FL〜2RRが、各車輪1FL〜1RRを回転自在に支持する。各アクスル2FL〜2RRは、サスペンションリンク3,4,5を介して車体側部材6,7に上下揺動可能に連結する。
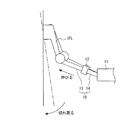
また、前輪1FL、1FRを支持するアクスル2FL、2FRには、車両前後方向後方に延びるアクスルアーム8を備える。そのアクスルアーム8に対し、タイロッド10の車輪側端部が連結する。タイロッド10の車体側端部は、ステアリングリングラックに対し上下揺動可能に連結している。ステアリングラック11は、軸を車幅方向に向けて延在した状態で、車体側部材に連結する。
また、ショックアブソーバの下端部がアクスル2FL〜2RRに連結する。ショックアブソーバは、車両上下方向に延びて、その上端部を車体側部材に連結する。
ここで、車両旋回時のロールステアによってアンダーステア方向にトー角変化が発生するように、サスペンションリンク3,4,5やタイロッド10の配置、及び各リンク長さを設定しておく。
また、ショックアブソーバの下端部がアクスル2FL〜2RRに連結する。ショックアブソーバは、車両上下方向に延びて、その上端部を車体側部材に連結する。
ここで、車両旋回時のロールステアによってアンダーステア方向にトー角変化が発生するように、サスペンションリンク3,4,5やタイロッド10の配置、及び各リンク長さを設定しておく。
各サスペンション装置毎に、サスペンションリンク3,4,5若しくはタイロッド10のうちの一つのリンク部材に対し、トー角制御装置12を設ける。このトー角制御装置12によって、リンク部材10,5のリンク長が変更可能となる。
本実施形態では、操舵輪である前輪1FL、1FRを懸架するサスペンション装置については、タイロッド10の途中にトー角制御装置12を設ける。また、後輪1RL、1RRを懸架するサスペンション装置については、トランスバースリンク5に対してトー角制御装置12を設ける。
本実施形態では、操舵輪である前輪1FL、1FRを懸架するサスペンション装置については、タイロッド10の途中にトー角制御装置12を設ける。また、後輪1RL、1RRを懸架するサスペンション装置については、トランスバースリンク5に対してトー角制御装置12を設ける。
ここで以下の説明では、タイロッド10に設けたトー角制御装置12を代表して、その構成について説明する。トランスバースリンク5に設けるトー角制御装置12も同じ構造である。
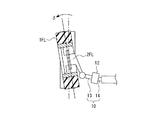
次に、上記トー角制御装置12の構造について説明する。
上記タイロッド10は、図2に示すように、延在方向途中で分離して2つのリンク部材13,14からなる。すなわち、タイロッド10は、アクスル側リンク部材13、及び車体側リンク部材14とからなる。
次に、上記トー角制御装置12の構造について説明する。
上記タイロッド10は、図2に示すように、延在方向途中で分離して2つのリンク部材13,14からなる。すなわち、タイロッド10は、アクスル側リンク部材13、及び車体側リンク部材14とからなる。
アクスル側リンク部材13の車輪側端部は、ボールジョイントを介して上記アクスルアーム8に連結する。また、アクスル側リンク部材13の車体側端部側には、その外周面に対し雄ねじ部16を形成する。この雄ねじ部16はアクスル側リンク部材13と一体となっている。更に、その雄ねじ部16よりも車体側部分(端面位置)には、外向きフランジ17を設ける。この外向きフランジ17は、抜け防止ストッパとなる。
また、車体側リンク部材14の車体側端部は、ボールジョイントによってステアリングラック11に連結する。その車体側リンク部材14の車輪側端部は、有底の筒形状をしたリンク連結部15となっている。上記リンク連結部15は、タイロッド10の軸に同軸に配置してある。そのリンク連結部15の中空部は、底部側の大径中空部15aと、それに続く遊挿部15bとからなる。遊挿部15bは、上記雄ねじ部16を遊挿可能な径の寸法の円筒面となっている。ただし遊挿部15bの径は、外向きフランジ17の径よりも小さい。また、大径中空部15aは、上記外向きフランジ17の外径よりも大きな径の寸法の中空となっている。
このリンク連結部15の中空部内に、上記雄ねじ部16を設けたアクスル側リンク部材13の車体側端部を同軸に配置する。このとき、外向きフランジ17が上記大径中空部15aに位置するように配置する。
上記遊挿部15bと雄ねじ部16との間に、トー角調整用アクチュエータ18を配置する。トー角調整用アクチュエータ18は、円筒形状をしていて、外径側の固定部18aに対して内径側の回転部18bが相対的に回転するモータ構造となっている。すなわち、本実施形態では、トー角調整用アクチュエータ18として、内径側が中空の同軸モータを例示している。そして、固定部18aが上記遊挿部15bに固定してある。また回転部18bの内径面に雌ねじ部19を設け、その雌ねじを上記雄ねじ部16の雄ねじに螺合させる。
上記遊挿部15bと雄ねじ部16との間に、トー角調整用アクチュエータ18を配置する。トー角調整用アクチュエータ18は、円筒形状をしていて、外径側の固定部18aに対して内径側の回転部18bが相対的に回転するモータ構造となっている。すなわち、本実施形態では、トー角調整用アクチュエータ18として、内径側が中空の同軸モータを例示している。そして、固定部18aが上記遊挿部15bに固定してある。また回転部18bの内径面に雌ねじ部19を設け、その雌ねじを上記雄ねじ部16の雄ねじに螺合させる。
上記トー角調整用アクチュエータ18は、後述のトー角制御コントローラからの指令に応じて回転変位する。このトー角調整用アクチュエータ18を駆動することで、雌ねじ部19が回転変位し、その回転変位分だけ、車体側リンク部材14に対しアクスル側リンク部材13を軸方向に送る。すなわち回転運動を直線運動に変換する構造となっている。これによって、トー角調整用アクチュエータ18を駆動することで、タイロッド10のリンク長を自由に変更可能となる。
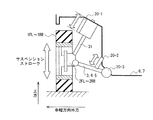
また、ストローク状態量計測装置20を備える。ストローク状態量計測装置20は、サスペンションストローク量及びストローク速度を検出する為に、車体に対するアクスル中心(ホイルセンタ)の相対的な上下変化量を検出する。検出した計測情報をストローク状態量演算手段21に出力する。なお、ストローク状態量演算手段21は、トー角制御コントローラ23内に設ける。
上記ストローク状態量計測装置20の例を、図3を参照して、3つ提示する。
第1のストローク状態量計測装置20−1は、サスペンション部品であるサスペンションスプリング又はショックアブソーバ31のストローク変位を計測する。ストローク状態量演算手段21は、予め取得しているレバー比に基づきサスペンションストローク量を演算する。また上下変位量微分演算することでストローク速度も演算する。
第1のストローク状態量計測装置20−1は、サスペンション部品であるサスペンションスプリング又はショックアブソーバ31のストローク変位を計測する。ストローク状態量演算手段21は、予め取得しているレバー比に基づきサスペンションストローク量を演算する。また上下変位量微分演算することでストローク速度も演算する。
第2のストローク状態量計測装置20−2は、いずれかのサスペンションリンク3,4,5と車体との間の変位を計測する。上下変位を求める。ストローク状態量演算手段21は、予め取得しているレバー比(校正値)に基づきサスペンションストローク量を演算する。また上下変位量微分演算することでストローク速度も演算する。
第3のストローク状態量計測装置20−3は、いずれかのサスペンションリンク3,4,5の車体側取付点における、回転中心の上下方向への角度変位を計測する。ストローク状態量演算手段21は、取得済みの校正値からサスペンションストローク量を演算する。また上下変位量微分演算することでストローク速度も演算する。
第3のストローク状態量計測装置20−3は、いずれかのサスペンションリンク3,4,5の車体側取付点における、回転中心の上下方向への角度変位を計測する。ストローク状態量演算手段21は、取得済みの校正値からサスペンションストローク量を演算する。また上下変位量微分演算することでストローク速度も演算する。
なお、上記第1及び第2のストローク状態量計測装置20−1,20−2に使用する変位を計測するセンサとしては、接触抵抗式棒変位計、巻尺接触抵抗式、ロータリーエンコーダ、非接触式変位計(レーザー、音波)等を例示出来る。
ここで、ストローク速度については、ストローク状態量演算手段21において、上下変位から演算するようにしている。これは速度計測装置の搭載を省略するためである。別途、ストローク速度を計測する装置を設けても良い。
ここで、ストローク速度については、ストローク状態量演算手段21において、上下変位から演算するようにしている。これは速度計測装置の搭載を省略するためである。別途、ストローク速度を計測する装置を設けても良い。
ストローク状態量演算手段21は、演算したストローク状態量をトー角制御コントローラ23に出力する。
また、転舵速度検出手段22を備える。転舵速度検出手段22は、車輪の転舵速度を検出する。例えば、センサによって、ステアリングラック11軸の進退速度を検出する。そして、ステアリングラック11軸の進退速度に所定のゲインを掛けて転舵速度に変換する。若しくはセンサによってステアリングラック11軸の進退量を検出し、その微分演算及び所定のゲインを掛けて転舵速度を求める。求めた転舵速度は、トー角制御コントローラ23に出力する。
また、転舵速度検出手段22を備える。転舵速度検出手段22は、車輪の転舵速度を検出する。例えば、センサによって、ステアリングラック11軸の進退速度を検出する。そして、ステアリングラック11軸の進退速度に所定のゲインを掛けて転舵速度に変換する。若しくはセンサによってステアリングラック11軸の進退量を検出し、その微分演算及び所定のゲインを掛けて転舵速度を求める。求めた転舵速度は、トー角制御コントローラ23に出力する。
トー角制御コントローラ23は、4輪の各輪毎にストローク量状態を取得して、各輪毎に所望のトー角を演算し、その制御信号をトー角調整用アクチュエータ18に出力する。
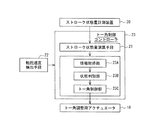
トー角制御コントローラ23は、図4に示すように、情報取得部23A、状態判別部23B、及びトー角制御部23Cを備える。
情報取得部23Aは、各輪毎に、ストローク状態量(ストローク量、ストローク速度)を取得すると共に、転舵速度情報を取得する。
状態判別部23Bは、取得したストローク状態量に基づき、車両の走行状態を判別する。
トー角制御コントローラ23は、図4に示すように、情報取得部23A、状態判別部23B、及びトー角制御部23Cを備える。
情報取得部23Aは、各輪毎に、ストローク状態量(ストローク量、ストローク速度)を取得すると共に、転舵速度情報を取得する。
状態判別部23Bは、取得したストローク状態量に基づき、車両の走行状態を判別する。
車両の走行状態としては、次のいずれの状態かを判別する。
・外乱の無い旋回状態
・外乱の無い直進状態
・外乱のある直進状態若しくは外乱のある旋回状態
上記外乱とは、走行路面の凹凸によって車両に入力する外乱である。この外乱によって所定以上のバウンスが発生する。
上記外乱の有無の判定は、ストローク速度(上下速度)によって判定する。すなわち、ストローク速度が第1上下速度A未満には外乱が無いと判定する。また、ストローク速度が第2上下速度以上の場合には、外乱があると判定する。
ここで、A<Bの関係にある。また、第1上下速度A以上且つ第2上下速度B未満の場合には、旋回し始め、若しくは切り戻しと判定する。
・外乱の無い旋回状態
・外乱の無い直進状態
・外乱のある直進状態若しくは外乱のある旋回状態
上記外乱とは、走行路面の凹凸によって車両に入力する外乱である。この外乱によって所定以上のバウンスが発生する。
上記外乱の有無の判定は、ストローク速度(上下速度)によって判定する。すなわち、ストローク速度が第1上下速度A未満には外乱が無いと判定する。また、ストローク速度が第2上下速度以上の場合には、外乱があると判定する。
ここで、A<Bの関係にある。また、第1上下速度A以上且つ第2上下速度B未満の場合には、旋回し始め、若しくは切り戻しと判定する。
ここで、路面外乱時は、旋回時に発生するロールに伴うサスペンションの上下速度と比較し、一般的にサスペンションストロークの上下速度(ストローク速度)は高速の領域である。一方、外乱無しの定常状態は、非常に微細な上下速度のみの入力となる。この考えに基づき、上記A及びBの基準を設けている。路面外乱がない状態は、舗装した平坦な路面を走行中の場合である。
例えば、第1上下速度Aを0.1m/secとし、第2上下速度Bを0.3m/sec
とする。ただし、このA及びBの値は、走行する路面状況や設計基準により任意に変更可能な値である。
また、旋回中か否かは、左右輪の上下変位量の差から判定し、所定以上の上下変位量の差があるつまりロールしていると判定できる場合には、旋回中とする。
例えば、第1上下速度Aを0.1m/secとし、第2上下速度Bを0.3m/sec
とする。ただし、このA及びBの値は、走行する路面状況や設計基準により任意に変更可能な値である。
また、旋回中か否かは、左右輪の上下変位量の差から判定し、所定以上の上下変位量の差があるつまりロールしていると判定できる場合には、旋回中とする。
以下に上記の内容を纏めて表示する。
車両状態 上下速度 上下変位
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
外乱無直進中 A未満 左右同相
外乱無旋回中 A未満 左右逆相
旋回し始め、切戻し A以上B未満 問わない
外乱有直進中 B以上 左右同相
外乱有旋回中 B以上 左右逆相
また、トー角制御部23Cは、車両の状態及び転舵速度に基づき、各輪のトー角調整用アクチュエータ18へ出力する制御量を演算して、各輪のトー角調整用アクチュエータ18へ出力する。
車両状態 上下速度 上下変位
−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−−
外乱無直進中 A未満 左右同相
外乱無旋回中 A未満 左右逆相
旋回し始め、切戻し A以上B未満 問わない
外乱有直進中 B以上 左右同相
外乱有旋回中 B以上 左右逆相
また、トー角制御部23Cは、車両の状態及び転舵速度に基づき、各輪のトー角調整用アクチュエータ18へ出力する制御量を演算して、各輪のトー角調整用アクチュエータ18へ出力する。
すなわち、トー角制御演算部は、ストローク速度がB未満の場合、つまり外乱がないと判定した場合には、アクチュエータロック指令を出力する。ただし、外乱無しの直進中と判定下場合には、トー角変化量が無い初期状態の長さに戻す指令を出力する。
また、トー角制御演算部は、ストローク速度がB以上の場合、つまり外乱があると判定した場合には、ストローク量に基づきサスペンションストロークによって生じるトー角変化が無くなる若しくは低減する制御量を演算して出力する。ただし、所定転舵速度以上で転舵が行われている場合には、トー角変化の抑制処理を中断する。
また、トー角制御演算部は、ストローク速度がB以上の場合、つまり外乱があると判定した場合には、ストローク量に基づきサスペンションストロークによって生じるトー角変化が無くなる若しくは低減する制御量を演算して出力する。ただし、所定転舵速度以上で転舵が行われている場合には、トー角変化の抑制処理を中断する。
次に、上記トー角制御コントローラ23の処理について、図5のフローを参照して説明する。
この処理は、所定のサンプリング周期毎に作動する。
まず、ステップS10にて各種信号を読み込み、続いてステップS20にて、サスペンションストローク量及びストローク速度を取得する。
次に、ステップS30にて、路面外乱が有るか否かを判定する。すなわち、ストローク速度が第2上下速度B以上か否かを判定する。路面外乱があると判定するとステップS100に移行する。一方、路面外乱が無いと判定した場合にはステップS40に移行する。
この処理は、所定のサンプリング周期毎に作動する。
まず、ステップS10にて各種信号を読み込み、続いてステップS20にて、サスペンションストローク量及びストローク速度を取得する。
次に、ステップS30にて、路面外乱が有るか否かを判定する。すなわち、ストローク速度が第2上下速度B以上か否かを判定する。路面外乱があると判定するとステップS100に移行する。一方、路面外乱が無いと判定した場合にはステップS40に移行する。
路面外乱が無いと判定してステップS40に移行すると、旋回し始め若しくは切り戻し中か否かを判定する。すなわち、ストローク速度が第1上下速度A以上か否かを判定する。第1上下速度以上と判定した場合には、ステップS80に移行して、トー角調整用アクチュエータ18をロック状態としておく。一方、ストローク速度が第1上下速度未満と判定した場合には、ステップS50に移行する。
ステップS50では、左右のサスペンションストロークが同相か否か、つまり直進走行中か否かを判定する。直進走行中と判定した場合にはステップS60に移行する。一方、旋回中と判定した場合にはステップS70に移行する。
ステップS60では、タイロッド10長が初期値の長さとする指令を設定してステップS80に移行する。
ステップS60では、タイロッド10長が初期値の長さとする指令を設定してステップS80に移行する。
ステップS70では、ロールステア量を演算し記憶してステップS80に移行する。
ステップS80では、指令値及びその時点若しくは現状の状態を維持する指令を設定して、ステップS140に移行する。
一方、路面外乱あると判定してステップS100に移行すると、転舵速度が所定速度以上、例えば1deg/sec以上の場合には、ステアリングホイール30を切り増し中、若しくは切り戻し中と判定してステップS80に移行して、トー角制御を行わない。一方、転舵速度が所定速度未満と判定するとステップS110に移行する。
ステップS80では、指令値及びその時点若しくは現状の状態を維持する指令を設定して、ステップS140に移行する。
一方、路面外乱あると判定してステップS100に移行すると、転舵速度が所定速度以上、例えば1deg/sec以上の場合には、ステアリングホイール30を切り増し中、若しくは切り戻し中と判定してステップS80に移行して、トー角制御を行わない。一方、転舵速度が所定速度未満と判定するとステップS110に移行する。
ステップS110では、サスペンションストローク量に基づき、当該ストロークで発生するトー角変化を打ち消す方向若しくは低減する方向へのトー角抑制量を生成する。ここで、予め、サスペンションストローク量とトー角変化量の相関を求め、マップや関数等で記憶しておき、そのマップや関数に基づき制御信号を求める。
次に、ステップS120において、左右サスペンションストローク量の変位に基づき旋回中か否かを判定し、ロールステア分の補正を行う。
次に、ステップS120において、左右サスペンションストローク量の変位に基づき旋回中か否かを判定し、ロールステア分の補正を行う。
すなわち、ステップS70で記憶したロールステア量に基づき、各輪毎のロールステア量分のトー角変化量を求め、上記ステップS110で求めたトー角抑制量を補正する。これによって、ロールステア量分のトー角を基準として、そのトー角とするためのトー角抑制量を求める。
ステップS130では、求めたトー角抑制量に対応する制御量を演算してステップS140に移行する。
ここで、トー角変化に応じたリンク伸縮量(回転変位量)との相関をマップや関数等で記憶しておき、そのマップや関数に基づき制御信号を求める。
ステップS130では、求めたトー角抑制量に対応する制御量を演算してステップS140に移行する。
ここで、トー角変化に応じたリンク伸縮量(回転変位量)との相関をマップや関数等で記憶しておき、そのマップや関数に基づき制御信号を求める。
ステップS140では、演算した制御信号を出力して復帰する。
ここで、アクスル側リンク部材13は一方のリンク部材を構成する。車体側リンク部材14は、他方のリンク部材を構成する。トー角制御部23Cはトー変化抑制手段を構成する。ストローク状態量計測装置20及びストローク状態量演算手段21は、ストローク速度検出手段を構成する。状態判定部及びステップS30は路面外乱検出手段を構成する。サスペンションリンク3,4,5及びタイロッド10はリンク部材を構成する。リンク連結部15は筒部を構成する。
ここで、アクスル側リンク部材13は一方のリンク部材を構成する。車体側リンク部材14は、他方のリンク部材を構成する。トー角制御部23Cはトー変化抑制手段を構成する。ストローク状態量計測装置20及びストローク状態量演算手段21は、ストローク速度検出手段を構成する。状態判定部及びステップS30は路面外乱検出手段を構成する。サスペンションリンク3,4,5及びタイロッド10はリンク部材を構成する。リンク連結部15は筒部を構成する。
(動作)
「サスペンション装置の前提」
本実施形態の各輪のサスペンション装置は、旋回ロール時に旋回性能を高く保つために、ロールステア量がアンダーステア方向に変化する設計をしてあるとする。つまりサスペンションストロークに応じて常にタイヤのトー角変化が発生する。このため凹凸のある路面を走行する際(以下、路面外乱時)では、運転者の意図しない操舵(トー角)が発生し、車両の挙動を乱してしまう。
これに対し、本実施形態では、トー角制御装置12によって、この路面外乱時のトー角変化を車両の挙動が発生しないようにする制御する。
「サスペンション装置の前提」
本実施形態の各輪のサスペンション装置は、旋回ロール時に旋回性能を高く保つために、ロールステア量がアンダーステア方向に変化する設計をしてあるとする。つまりサスペンションストロークに応じて常にタイヤのトー角変化が発生する。このため凹凸のある路面を走行する際(以下、路面外乱時)では、運転者の意図しない操舵(トー角)が発生し、車両の挙動を乱してしまう。
これに対し、本実施形態では、トー角制御装置12によって、この路面外乱時のトー角変化を車両の挙動が発生しないようにする制御する。
「外乱の無い路面を直進走行時と旋回時」
路面外乱の無い状態で直進走行時と旋回時においては、計測装置から入力するサスペンションストローク速度は基準第1上下速度A未満である。これに基づき、路面外乱が無いと判定し、トー角調整用アクチュエータ18へ新たな駆動信号は送信せず、ロック信号を出力する。これによって、タイヤトー角は現在のままとなる。
ただし、タイロッド10の長さが初期時の長さでない場合には、直進走行時にタイロッド10の長さを初期長に戻しておく。
またこのとき、車両の姿勢変化によって発生するトー角(ロールステア量)をサスペンションストローク量から演算して、記憶をしておく。
これよって、外乱の無い平坦な路面を走行中は、上述のように、サスペンションストロークに応じて、ロールステア量がアンダーステア方向となるようにトー変化が発生する。
路面外乱の無い状態で直進走行時と旋回時においては、計測装置から入力するサスペンションストローク速度は基準第1上下速度A未満である。これに基づき、路面外乱が無いと判定し、トー角調整用アクチュエータ18へ新たな駆動信号は送信せず、ロック信号を出力する。これによって、タイヤトー角は現在のままとなる。
ただし、タイロッド10の長さが初期時の長さでない場合には、直進走行時にタイロッド10の長さを初期長に戻しておく。
またこのとき、車両の姿勢変化によって発生するトー角(ロールステア量)をサスペンションストローク量から演算して、記憶をしておく。
これよって、外乱の無い平坦な路面を走行中は、上述のように、サスペンションストロークに応じて、ロールステア量がアンダーステア方向となるようにトー変化が発生する。
「直進状態で路面外乱が発生した場合」
路面外乱により左輪が上方にバウンドした場合を例に説明する。
通常であればバウンドによりトー角変化(δ)が生じる(図6参照)。このバウンド時にストローク状態量計測装置20は縮み、そのストローク量及びストローク速度をトー角制御コントローラ23が取得する。
そして、ストローク速度が、路面外乱と判定する第2上下速度B以上の場合には、路面外乱と判定する。そして、トー角制御を行う為に、アクチュエータ制御演算へと移る。
路面外乱により左輪が上方にバウンドした場合を例に説明する。
通常であればバウンドによりトー角変化(δ)が生じる(図6参照)。このバウンド時にストローク状態量計測装置20は縮み、そのストローク量及びストローク速度をトー角制御コントローラ23が取得する。
そして、ストローク速度が、路面外乱と判定する第2上下速度B以上の場合には、路面外乱と判定する。そして、トー角制御を行う為に、アクチュエータ制御演算へと移る。
トー角制御コントローラ23では、バウンドで発生するトー角変化を打ち消す方向にアクチュエータ制御信号生成し、トー角調整用アクチュエータ18へ駆動信号の出力を行う。このときのトー角調整用アクチュエータ18が行うべき駆動量を、事前に記憶しているサスペンションストローク量と対応するトー角に必要なリンク伸縮量(トー角調整用アクチュエータ18の可動回転数)の相関を元に求める。
トー角調整用アクチュエータ18は制御信号に応じて回転可動する。左輪の場合には、図7に示すように、ネジ機構によってアクスル側リンク部材13が伸展し、トー角変化δを打ち消しトー角0(直進走行時で且つバウンス零のときのトー角)とする。
トー角調整用アクチュエータ18は制御信号に応じて回転可動する。左輪の場合には、図7に示すように、ネジ機構によってアクスル側リンク部材13が伸展し、トー角変化δを打ち消しトー角0(直進走行時で且つバウンス零のときのトー角)とする。
ここで、サスペンションがリバウンドした場合は、路面外乱判定までは同じであり、アクスル側リンクの伸縮符号が逆(この場合は縮む)となる。
「旋回中に路面外乱が発生した場合」
ここで説明するシーンは、車両の定常旋回状態が成立した上で、路面外乱が発生した場合を想定している。
旋回をしている際に発生するトー角変化量には、ステアリング操舵角に相当するタイヤトー角とロールステアにより発生したトー角、外乱によりストロークした際の余分なロールステアに相当するトー角の3つが混在している。
本過程にて制御対象とするトー角は、余分なロールステアに相当するトー角(以下、余分なトー角)に限定する。
「旋回中に路面外乱が発生した場合」
ここで説明するシーンは、車両の定常旋回状態が成立した上で、路面外乱が発生した場合を想定している。
旋回をしている際に発生するトー角変化量には、ステアリング操舵角に相当するタイヤトー角とロールステアにより発生したトー角、外乱によりストロークした際の余分なロールステアに相当するトー角の3つが混在している。
本過程にて制御対象とするトー角は、余分なロールステアに相当するトー角(以下、余分なトー角)に限定する。
この余分なトー角発生のメカニズムは主に、上述のδと同じであり、打ち消す為の各装置が行う動作も手順も、直進走行中とほぼ同様となる。路面外乱を判定する基準も同じである。
旋回中の場合には、トー角調整用アクチュエータ18が行うべき駆動量の演算は、余分なトー角変化δに相当するサスペンション上下変位量と、記憶したロールステア量維持に必要なリンク伸縮量(トー角調整用アクチュエータ18の可動回転数)の相関を元にする。すなわち、ロールステア量維持に必要なリンク伸縮量分だけ、補正を行う。
旋回中の場合には、トー角調整用アクチュエータ18が行うべき駆動量の演算は、余分なトー角変化δに相当するサスペンション上下変位量と、記憶したロールステア量維持に必要なリンク伸縮量(トー角調整用アクチュエータ18の可動回転数)の相関を元にする。すなわち、ロールステア量維持に必要なリンク伸縮量分だけ、補正を行う。
ここで、操舵輪でない車輪(例えば操舵輪であれば後輪)を懸架するサスペンション装置では、ステアリング操舵角に相当するタイヤトー角が存在しなくなるだけであり、これ以外は同じである。
また、ステアリングホイール30の切り増し中若しくは切り戻し中は、トー角制御を中断する。
「旋回し始め、切戻し時」
旋回し始め、切り戻し時では、先に説明したように、サスペンション上下速度がA以上B未満の領域であり、トー角調整用アクチュエータ18には新たな駆動信号を送信せず現状維持のままとする。
また、ステアリングホイール30の切り増し中若しくは切り戻し中は、トー角制御を中断する。
「旋回し始め、切戻し時」
旋回し始め、切り戻し時では、先に説明したように、サスペンション上下速度がA以上B未満の領域であり、トー角調整用アクチュエータ18には新たな駆動信号を送信せず現状維持のままとする。
(本実施形態の効果)
(1)アクスルを車体側部材に対して上下揺動可能に連結するリンク部材の少なくとも1つのリンク部材は、このリンク部材を伸縮可能な構造とするトー角制御装置12を設ける。
これによって、各車輪のトー角を個別に変更可能となる。これによって、凹凸路面走行時などの路面外乱時のトー角変化を左右輪個別に調整可能となる。
(1)アクスルを車体側部材に対して上下揺動可能に連結するリンク部材の少なくとも1つのリンク部材は、このリンク部材を伸縮可能な構造とするトー角制御装置12を設ける。
これによって、各車輪のトー角を個別に変更可能となる。これによって、凹凸路面走行時などの路面外乱時のトー角変化を左右輪個別に調整可能となる。
(2)伸縮可能な構造としたリンク部材であるタイロッド10は、第1リンク部材であるアクスル側リンク部材13と、第2リンク部材である車体側リンク部材14とで構成されて、両者13,14をねじ機構で連結する。更に、上記雄ねじ部16若しくは雌ねじ部19を回転駆動するトー角調整用アクチュエータ18を備える。
この構造によって、確実にタイロッド10のリンク長を自由に変更可能となる。
また、ねじ機構でリンク長を変更するので、大きな軸荷重に耐えることが可能となる。
この構造によって、確実にタイロッド10のリンク長を自由に変更可能となる。
また、ねじ機構でリンク長を変更するので、大きな軸荷重に耐えることが可能となる。
(3)更に伸縮可能な構造としたリンク部材であるタイロッド10は、雄ねじ部16側を回転駆動するようにして、他方のリンク部材(車体側リンク部材14)に対し上記雄ねじ部16を同軸に遊挿する筒部を設け、一方のリンク部材(アクスル側リンク部材13)を他方のリンク部材(車体側リンク部材14)よりも車幅方向外側に配置した。
これによって、トー角調整用アクチュエータ18を、伸縮しない側に設けることが出来る。
また、雌ねじ部19側を回転駆動するので、トー角調整用アクチュエータ18が回転駆動する際の反力を大きく設定出来る。すなわち、雄ねじ部16よりも雌ねじ部19が外径側に配置する分だけ反力を受け持つ部分の面積を稼ぐことが出来る。
これによって、トー角調整用アクチュエータ18を、伸縮しない側に設けることが出来る。
また、雌ねじ部19側を回転駆動するので、トー角調整用アクチュエータ18が回転駆動する際の反力を大きく設定出来る。すなわち、雄ねじ部16よりも雌ねじ部19が外径側に配置する分だけ反力を受け持つ部分の面積を稼ぐことが出来る。
(4)トー角制御部(トー変化抑制手段)23Cは、路面外乱があると判定すると、サスペンションストロークによるトー角変化を抑える方向にタイロッド10のリンク長さを変化させる。
これによって、旋回ロール時に、旋回性能を高く保つために、ロールステア量がアンダーステア方向に変化させるように設計しても、路面外乱時に運転者が意図しない操舵(とー角変化)が発生するような車両挙動を抑えることが出来る。
これによって、旋回ロール時に、旋回性能を高く保つために、ロールステア量がアンダーステア方向に変化させるように設計しても、路面外乱時に運転者が意図しない操舵(とー角変化)が発生するような車両挙動を抑えることが出来る。
(5)状態判別部(路面外乱検出手段)23Bは、サスペンションストロークのストローク速度が所定以上の場合に、路面外乱があると判定する。
これによって、路面外乱を検出するためだけのセンサを別途使用することなく、路面外乱を検出することが可能となる。
(6)トー角制御部(トー変化抑制手段)23Cは、車車両が旋回中と判定した場合には、ロールステアに相当するトー角を基準として抑えるべきトー角変化量を求める。
これによって、旋回ロール分のトー角を確保出来て、旋回性能の低減を抑えることが可能となる。
これによって、路面外乱を検出するためだけのセンサを別途使用することなく、路面外乱を検出することが可能となる。
(6)トー角制御部(トー変化抑制手段)23Cは、車車両が旋回中と判定した場合には、ロールステアに相当するトー角を基準として抑えるべきトー角変化量を求める。
これによって、旋回ロール分のトー角を確保出来て、旋回性能の低減を抑えることが可能となる。
(7)さらに、トー角制御部(トー変化抑制手段)23Cは、転舵変更中と判定した場合には、トー角変化を抑える方向への上記リンク部材の長さを変化を中断する。
操舵角の変更中にトー角抑制を行うと、操舵を抑えることとなる。これに鑑み、切り増し及び切り戻し中には、トー角変化の抑制を抑える事で、運転者が意図する操舵による旋回を確保する。
操舵角の変更中にトー角抑制を行うと、操舵を抑えることとなる。これに鑑み、切り増し及び切り戻し中には、トー角変化の抑制を抑える事で、運転者が意図する操舵による旋回を確保する。
(変形例)
(1)上記実施形態では、トー角制御装置12を、タイロッド10に介装する場合を例示した。これに代えて、他のサスペンションリンクにトー角制御装置12を設けても良い。効果は同じである。
(2)上記実施形態では、雌ねじ部側をトー角調整用アクチュエータで回転変位させることを例示したが、雄ねじ部側をトー角調整用アクチュエータで回転変位させる機構でも良い。また、アクスル側リンク部材に雄ねじ部を形成しても良い。
(1)上記実施形態では、トー角制御装置12を、タイロッド10に介装する場合を例示した。これに代えて、他のサスペンションリンクにトー角制御装置12を設けても良い。効果は同じである。
(2)上記実施形態では、雌ねじ部側をトー角調整用アクチュエータで回転変位させることを例示したが、雄ねじ部側をトー角調整用アクチュエータで回転変位させる機構でも良い。また、アクスル側リンク部材に雄ねじ部を形成しても良い。
1FL〜1RR 各車輪
2FL〜2RR アクスル
3,4,5 サスペンションリンク(リンク部材)
5 トランスバースリンク
6,7 車体側部材
8 アクスルアーム
10 タイロッド(リンク部材)
11 ステアリングラック
12 トー角制御装置
13 アクスル側リンク部材(一方のリンク部材)
14 車体側リンク部材(他方のリンク部材)
15 リンク連結部(筒部)
15a 大径中空部
15b 遊挿部
16 雄ねじ部
18 トー角調整用アクチュエータ
18b 回転部
18a 固定部
19 雌ねじ部
20 ストローク状態量計測装置(ストローク速度検出手段)
21 ストローク状態量演算手段(ストローク速度検出手段)
22 転舵速度検出手段
23 トー角制御コントローラ
23A 情報取得部
23B 状態判別部(路面外乱検出手段)
23C トー角制御部(トー変化抑制手段)
A 第1上下速度
B 第2上下速度
2FL〜2RR アクスル
3,4,5 サスペンションリンク(リンク部材)
5 トランスバースリンク
6,7 車体側部材
8 アクスルアーム
10 タイロッド(リンク部材)
11 ステアリングラック
12 トー角制御装置
13 アクスル側リンク部材(一方のリンク部材)
14 車体側リンク部材(他方のリンク部材)
15 リンク連結部(筒部)
15a 大径中空部
15b 遊挿部
16 雄ねじ部
18 トー角調整用アクチュエータ
18b 回転部
18a 固定部
19 雌ねじ部
20 ストローク状態量計測装置(ストローク速度検出手段)
21 ストローク状態量演算手段(ストローク速度検出手段)
22 転舵速度検出手段
23 トー角制御コントローラ
23A 情報取得部
23B 状態判別部(路面外乱検出手段)
23C トー角制御部(トー変化抑制手段)
A 第1上下速度
B 第2上下速度
Claims (6)
- 車両前後方向前側または後側の左右輪それぞれについて、車輪を回転自在に支持する車輪支持部材を車体側部材に対して上下揺動可能に連結するリンク部材の少なくとも1つのリンク部材を伸縮可能な構造としたトー角制御装置であって、
上記伸縮可能な構造としたリンク部材を、当該リンク部材の延在方向途中で第1リンク部材と第2リンク部材に分離し、
上記第1リンク部材及び第2リンク部材のうち、一方のリンク部材の外周部に雄ねじを形成した雄ねじ部を設けると共に、他方のリンク部材の内周部に雌ねじを形成した雌ねじ部を設け、上記雄ねじ部と雌ねじ部とを螺合させてなるねじ機構で、上記第1リンク部材と第2リンク部材とを連結すると共に、
上記雄ねじ部若しくは雌ねじ部を回転駆動するトー角調整用アクチュエータを備える
ことを特徴とするトー角制御装置。 - 上記他方のリンク部材に対し上記雄ねじ部を同軸に遊挿する筒部を設け、
その筒部の内径面に対し同軸に配置して当該筒部に反力を取って内径部が回転駆動するモータを上記トー角調整用アクチュエータとし、上記モータの内径部に対し上記雌ねじ部を設け、
一方のリンク部材を他方のリンク部材よりも車幅方向外側に配置したことを特徴とする請求項1に記載したトー角制御装置。 - リンク配置によってサスペンションストロークに応じて車輪のトー角が変化する車両用サスペンション装置であって、
上記請求項1又は2のいずれか1項に記載のトー角制御装置と、
凹凸のある路面を走行することとによる路面外乱があるか否かを判定する路面外乱検出手段と、
路面外乱検出手段によって路面外乱があると判定すると、サスペンションストロークによるトー角変化を抑える方向に上記トー角調整用アクチュエータを駆動して上記リンク部材の長さを変化させるトー変化抑制手段と、を備えることを特徴とする車両用サスペンション装置。 - サスペンションストロークのストローク速度を検出するストローク速度検出手段を備え、 上記路面外乱検出手段は、上記ストローク速度が所定以上の場合に、路面外乱があると判定することを特徴とする請求項3に記載した車両用サスペンション装置。
- トー変化抑制手段は、車両が旋回中と判定した場合には、ロールステアに相当するトー角を基準として抑えるべきトー角変化量を求めることを特徴とする請求項3又は請求項4に記載した車両用サスペンション装置。
- 転舵変更中か否かを判定する転舵速度検出手段を備え、
トー変化抑制手段は、上記転舵変更中と判定した場合には、トー角変化を抑える方向への上記リンク部材の長さを変化を中断することを特徴とする請求項3〜請求項5のいずれか1項に記載した車両用サスペンション装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008155768A JP2009298317A (ja) | 2008-06-13 | 2008-06-13 | トー角制御装置及び車両用サスペンション装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008155768A JP2009298317A (ja) | 2008-06-13 | 2008-06-13 | トー角制御装置及び車両用サスペンション装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2009298317A true JP2009298317A (ja) | 2009-12-24 |
Family
ID=41545671
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008155768A Pending JP2009298317A (ja) | 2008-06-13 | 2008-06-13 | トー角制御装置及び車両用サスペンション装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009298317A (ja) |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012236550A (ja) * | 2011-05-13 | 2012-12-06 | Ntn Corp | ステアバイワイヤ式操舵装置 |
| KR20200040009A (ko) * | 2018-10-08 | 2020-04-17 | 현대자동차주식회사 | 후륜조향장치의 토우가변제어 방법 |
| CN114056419A (zh) * | 2020-08-06 | 2022-02-18 | 丰田自动车株式会社 | 转向系统 |
| CN114212145A (zh) * | 2021-12-31 | 2022-03-22 | 智己汽车科技有限公司 | 一种汽车转向控制方法及设备 |
| CN114763177A (zh) * | 2021-01-15 | 2022-07-19 | 丰田自动车株式会社 | 车辆用转舵系统 |
| JP2023057397A (ja) * | 2021-10-11 | 2023-04-21 | トヨタ自動車株式会社 | 車両 |
| CN116380000A (zh) * | 2023-03-16 | 2023-07-04 | 合众新能源汽车股份有限公司 | 一种四轮定位自动校准方法及装置 |
| JP2023141171A (ja) * | 2022-03-23 | 2023-10-05 | 株式会社Subaru | 車両の操舵装置 |
-
2008
- 2008-06-13 JP JP2008155768A patent/JP2009298317A/ja active Pending
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012236550A (ja) * | 2011-05-13 | 2012-12-06 | Ntn Corp | ステアバイワイヤ式操舵装置 |
| KR20200040009A (ko) * | 2018-10-08 | 2020-04-17 | 현대자동차주식회사 | 후륜조향장치의 토우가변제어 방법 |
| KR102540888B1 (ko) | 2018-10-08 | 2023-06-08 | 현대자동차주식회사 | 후륜조향장치의 토우가변제어 방법 |
| CN114056419A (zh) * | 2020-08-06 | 2022-02-18 | 丰田自动车株式会社 | 转向系统 |
| CN114763177A (zh) * | 2021-01-15 | 2022-07-19 | 丰田自动车株式会社 | 车辆用转舵系统 |
| CN114763177B (zh) * | 2021-01-15 | 2024-04-26 | 丰田自动车株式会社 | 车辆用转舵系统 |
| JP2023057397A (ja) * | 2021-10-11 | 2023-04-21 | トヨタ自動車株式会社 | 車両 |
| JP7635694B2 (ja) | 2021-10-11 | 2025-02-26 | トヨタ自動車株式会社 | 車両 |
| CN114212145A (zh) * | 2021-12-31 | 2022-03-22 | 智己汽车科技有限公司 | 一种汽车转向控制方法及设备 |
| CN114212145B (zh) * | 2021-12-31 | 2023-03-03 | 智己汽车科技有限公司 | 一种汽车转向控制方法及设备 |
| JP2023141171A (ja) * | 2022-03-23 | 2023-10-05 | 株式会社Subaru | 車両の操舵装置 |
| CN116380000A (zh) * | 2023-03-16 | 2023-07-04 | 合众新能源汽车股份有限公司 | 一种四轮定位自动校准方法及装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009298317A (ja) | トー角制御装置及び車両用サスペンション装置 | |
| JP4977152B2 (ja) | 後輪操舵制御装置 | |
| JP2010083212A (ja) | 車両用制御装置 | |
| JP2005289076A (ja) | 車両のロールオーバ防止装置 | |
| US11840293B2 (en) | Turning system for vehicle | |
| JP2009161079A (ja) | 後輪トー角可変車両 | |
| JP5549542B2 (ja) | 車輪角度調整装置 | |
| CN202088834U (zh) | 车辆用悬架装置 | |
| JP4868133B2 (ja) | トウ角・キャンバー角可変装置 | |
| JP2011073542A (ja) | 車両用制御装置 | |
| CN202080083U (zh) | 车辆用悬架装置 | |
| JP5110055B2 (ja) | 車両用制御装置 | |
| JP5146427B2 (ja) | 車両用制御装置 | |
| KR100862428B1 (ko) | 캠버각 조정을 통한 구배로에서의 차량 쏠림 방지 장치 | |
| JP4987779B2 (ja) | 車両の後輪トー角制御装置 | |
| JP2011116164A (ja) | 車両用制御装置 | |
| CN202080084U (zh) | 车辆用悬架装置 | |
| JP5671917B2 (ja) | 車両用制御装置 | |
| JP2010234819A (ja) | 車両の後輪操舵制御装置 | |
| JP2009214774A (ja) | 後輪転舵制御装置 | |
| KR100559552B1 (ko) | 차량 전륜의 캐스터각 조정 기구 | |
| KR20190045727A (ko) | 스트럿형 현가장치 및 이를 이용한 차량 제어방법 | |
| JP5293491B2 (ja) | 車両用制御装置 | |
| JP5056306B2 (ja) | 制御装置 | |
| KR20090014827A (ko) | 차량의 후륜 멀티 링크 가상 킹핀축 가변 시스템 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100917 |