JP2009227135A - 車両の操舵制御装置 - Google Patents
車両の操舵制御装置 Download PDFInfo
- Publication number
- JP2009227135A JP2009227135A JP2008075936A JP2008075936A JP2009227135A JP 2009227135 A JP2009227135 A JP 2009227135A JP 2008075936 A JP2008075936 A JP 2008075936A JP 2008075936 A JP2008075936 A JP 2008075936A JP 2009227135 A JP2009227135 A JP 2009227135A
- Authority
- JP
- Japan
- Prior art keywords
- steering
- force
- understeer state
- suppression
- understeer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Landscapes
- Steering Control In Accordance With Driving Conditions (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Regulating Braking Force (AREA)
- Power Steering Mechanism (AREA)
Abstract
【解決手段】この装置では、アンダステア抑制制御として、操舵トルク制御(「抑制トルクTusの付与」)が実行される。操舵トルク制御では、運転者による操舵トルクTswに基づいて操舵トルクを軽減するためのEPSトルクTepsが演算され、アンダステアの程度を表すアンダステア状態量Jrusに基づいてステアリングホイールの「切増し」を抑制するための抑制トルクTusが演算される。運転者による操舵トルクを軽減するためのトルクが、「Teps−Tus」に調整される。ステアリングホイール操作角を維持するため、運転者は、Tusに相当する操舵トルクを余分に必要とし、アンダステアが抑制される。ここで、Jrusに対するTusの増大特性が下に凸の特性に設定される。
【選択図】図2
Description
図1は、本発明の第1実施形態に係る操舵制御装置を搭載した車両の概略構成を示している。
次に、図2を参照しながら、第1実施形態が実行するアンダステア抑制制御について説明する。第1実施形態では、アンダステア抑制制御として、操舵トルク制御と制動力制御とが実行される。先ず、操舵トルク制御について説明する。
次に、図3に示した抑制トルクTusの特性について説明する。図3の実線に示すように、Tusは、アンダステア状態量Jrusが閾値Jr1(前記「第1閾値」に対応、図4のJr1と同じ値)以下のときにゼロに演算され、JrusがJr1よりも大きいときにJrusのJr1からの増大に伴ってゼロから増大するように(ただし、値Tu1以下に制限される)演算される。即ち、「Jrus>Jr1」を開始条件として、操舵トルク制御におけるTusの付与が開始される。
次に、本発明の第2実施形態に係る操舵制御装置について説明する。この第2実施形態は、アンダステア抑制制御として、上記第1実施形態における操舵トルク制御(「抑制トルクTusの付与」)と制動力制御(「旋回内側後輪への制動力の付与」)とに加えて、操舵比制御(「操舵比の増大」)が実行される点が上記第1実施形態と異なる。以下、係る相違点についてのみ説明する。
Claims (6)
- 車両のヨーイング運動に相当する値(VMa)を取得し、前記ヨーイング運動に相当する値に基づいて、前記車両のアンダステアの程度を表すアンダステア状態量(Jrus)を演算する状態量演算手段(A3,A4,A5)と、
前記アンダステア状態量に基づいて、前記車両の運転者により操向車輪(WHf*)の転舵のために操作される操舵操作部材(SW)の中立位置からの操作量(θsw)の増大を抑制するための抑制力(Tus)を演算する抑制力演算手段(A6)と、
前記抑制力を、前記操舵操作部材に対して前記操作量を減少させる方向に付与する力付与手段(A7)と、
を備えた車両の操舵制御装置において、
前記抑制力演算手段は、
前記アンダステア状態量の増加に対する前記抑制力の増加勾配が前記アンダステア状態量の増加に伴って増大するように前記抑制力を演算するよう構成された車両の操舵制御装置。 - 車両の運転者により操向車輪(WHf*)の転舵のために操作される操舵操作部材(SW)の前記運転者による操作力(Tsw)を取得する取得手段(A1)と、
前記操作力に基づいて、前記運転者による前記操作力を助勢するための助勢力(Teps)を演算する助勢力演算手段(A2)と、
前記車両のヨーイング運動に相当する値(VMa)を取得し、前記ヨーイング運動に相当する値に基づいて、前記車両のアンダステアの程度を表すアンダステア状態量(Jrus)を演算する状態量演算手段(A3,A4,A5)と、
前記アンダステア状態量に基づいて、前記操舵操作部材の中立位置からの操作量(θsw)の増大を抑制するための抑制力(Tus)を演算する抑制力演算手段(A6)と、
前記助勢力を前記抑制力に基づいて減少させて得られる力(Tmtr)を、前記操舵操作部材に対して前記操作量を増大させる方向に付与する力付与手段(A7)と、
を備えた車両の操舵制御装置において、
前記抑制力演算手段は、
前記アンダステア状態量の増加に対する前記抑制力の増加勾配が前記アンダステア状態量の増加に伴って増大するように前記抑制力を演算するよう構成された車両の操舵制御装置。 - 請求項1又は請求項2に記載の車両の操舵制御装置であって、
前記アンダステア状態量に基づいて、前記車両の旋回内側の後輪に付与すべき制動力の目標値(Fxt**)を演算する制動力演算手段(A8)と、
前記制動力の目標値に基づいて前記旋回内側の後輪に制動力を付与する制動力制御手段(A9)と、
を備え、
前記抑制力演算手段は、
前記アンダステア状態量が第1閾値(Jr1)以下のときに前記抑制力をゼロに演算し、前記アンダステア状態量が前記第1閾値よりも大きいときに前記アンダステア状態量の前記第1閾値からの増大に伴って前記抑制力がゼロから増大するように前記抑制力を演算するよう構成され、
前記制動力演算手段は、
前記アンダステア状態量が前記第1閾値(Jr1)以下のときに前記制動力の目標値をゼロに演算し、前記アンダステア状態量が前記第1閾値よりも大きいときに前記アンダステア状態量の前記第1閾値からの増大に伴って前記制動力の目標値がゼロから増大するように前記制動力の目標値を演算するよう構成された車両の操舵制御装置。 - 請求項3に記載の車両の操舵制御装置において、
前記抑制力演算手段は、
前記アンダステア状態量が前記第1閾値よりも大きい範囲に亘って、
前記アンダステア状態量に対する前記抑制力(Ch1,Ch2)が、
前記制動力の前記旋回内側の後輪への付与に起因する、前記運転者による前記操舵操作部材の操作力についての前記アンダステア状態量に対する減少量(Chbr)よりも大きくなるように、前記抑制力を演算するよう構成された車両の操舵制御装置。 - 請求項1又は請求項2に記載の車両の操舵制御装置であって、
前記アンダステア状態量に基づいて、前記操向車輪の転舵角(δfa)に対する前記操舵操作部材の前記操作量(θsw)の割合である操舵比の目標値(SG)を演算する操舵比演算手段(A10)と、
前記操舵比の実際値が前記操舵比の目標値となるように前記操舵比を調整する操舵比調整手段(A11,A12)と、
を備え、
前記抑制力演算手段は、
前記アンダステア状態量が第2閾値(Jr1)以下のときに前記抑制力をゼロに演算し、前記アンダステア状態量が前記第2閾値よりも大きいときに前記アンダステア状態量の前記第2閾値からの増大に伴って前記抑制力がゼロから増大するように前記抑制力を演算するよう構成され、
前記操舵比演算手段は、
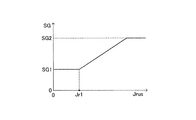
前記アンダステア状態量が前記第2閾値(Jr1)以下のときに前記操舵比の目標値を第1所定値(SG1)に演算し、前記アンダステア状態量が前記第2閾値よりも大きいときに前記アンダステア状態量の前記第2閾値からの増大に伴って前記操舵比の目標値が前記第1所定値から増大するように前記操舵比の目標値を演算するよう構成された車両の操舵制御装置。 - 請求項5に記載の車両の操舵制御装置において、
前記抑制力演算手段は、
前記アンダステア状態量が前記第2閾値よりも大きい範囲に亘って、
前記アンダステア状態量に対する前記抑制力(Ch1,Ch2)が、
前記操舵比の増大に起因する、前記運転者による前記操舵操作部材の操作力についての前記アンダステア状態量に対する減少量(Chvg)よりも大きくなるように、前記抑制力を演算するよう構成された車両の操舵制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008075936A JP5251195B2 (ja) | 2008-03-24 | 2008-03-24 | 車両の操舵制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008075936A JP5251195B2 (ja) | 2008-03-24 | 2008-03-24 | 車両の操舵制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009227135A true JP2009227135A (ja) | 2009-10-08 |
| JP5251195B2 JP5251195B2 (ja) | 2013-07-31 |
Family
ID=41243054
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008075936A Expired - Fee Related JP5251195B2 (ja) | 2008-03-24 | 2008-03-24 | 車両の操舵制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5251195B2 (ja) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1120728A (ja) * | 1997-07-03 | 1999-01-26 | Honda Motor Co Ltd | 車両用操舵装置 |
| JP2003252084A (ja) * | 2002-03-04 | 2003-09-09 | Mitsubishi Motors Corp | 操舵・制動統合制御装置 |
| JP2007126015A (ja) * | 2005-11-04 | 2007-05-24 | Advics:Kk | 車両の重心位置横加速度取得装置、及び車両の運動制御装置 |
| JP2007131251A (ja) * | 2005-11-14 | 2007-05-31 | Advics:Kk | 車両の運動制御装置 |
-
2008
- 2008-03-24 JP JP2008075936A patent/JP5251195B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1120728A (ja) * | 1997-07-03 | 1999-01-26 | Honda Motor Co Ltd | 車両用操舵装置 |
| JP2003252084A (ja) * | 2002-03-04 | 2003-09-09 | Mitsubishi Motors Corp | 操舵・制動統合制御装置 |
| JP2007126015A (ja) * | 2005-11-04 | 2007-05-24 | Advics:Kk | 車両の重心位置横加速度取得装置、及び車両の運動制御装置 |
| JP2007131251A (ja) * | 2005-11-14 | 2007-05-31 | Advics:Kk | 車両の運動制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5251195B2 (ja) | 2013-07-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8165756B2 (en) | Steering control device for vehicle | |
| JP5251067B2 (ja) | 車両の操舵制御装置 | |
| JP4924378B2 (ja) | 車輌の走行制御装置 | |
| US7418329B2 (en) | Steering control apparatus for a vehicle | |
| EP1510438B1 (en) | Control device for vehicle power steering | |
| US8892305B2 (en) | Motion control device for vehicle | |
| JP5516146B2 (ja) | 車両の走行制御装置 | |
| KR100816308B1 (ko) | 조타륜에 작용하는 차륜 미끄러짐 제어 장치를 구비한차량의 전동식 파워 스티어링 장치의 제어 장치 | |
| US7337873B2 (en) | Steering control apparatus for a vehicle | |
| JP5431745B2 (ja) | 車両の運動制御装置 | |
| US11702073B2 (en) | System and method for controlling a vehicle steering system | |
| JP4172361B2 (ja) | 電動式パワーステアリング装置用制御装置 | |
| JP5115276B2 (ja) | 車両の操舵制御装置 | |
| JP5251195B2 (ja) | 車両の操舵制御装置 | |
| JP4296970B2 (ja) | 車輌の挙動制御装置 | |
| JP5163752B2 (ja) | パワーステアリング装置 | |
| JP5194430B2 (ja) | 車両の4輪操舵制御装置 | |
| JP5194949B2 (ja) | 車両の操舵制御装置 | |
| JP2006015871A (ja) | 反力制御装置 | |
| JP5194429B2 (ja) | 車両の4輪操舵制御装置 | |
| JP4811196B2 (ja) | 車両の操舵制御装置 | |
| JP2012106588A (ja) | 車両の操舵力制御装置 | |
| JP4685407B2 (ja) | 車輌の挙動制御装置 | |
| JP4284211B2 (ja) | 車両の操舵制御装置 | |
| JP2022083564A (ja) | 操舵力制御装置、ステアリング制御装置及びステアバイワイヤシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110318 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121130 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130125 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130319 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130401 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5251195 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160426 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |