JP2009122002A - 情報報知装置、情報報知方法及びプログラム - Google Patents
情報報知装置、情報報知方法及びプログラム Download PDFInfo
- Publication number
- JP2009122002A JP2009122002A JP2007297393A JP2007297393A JP2009122002A JP 2009122002 A JP2009122002 A JP 2009122002A JP 2007297393 A JP2007297393 A JP 2007297393A JP 2007297393 A JP2007297393 A JP 2007297393A JP 2009122002 A JP2009122002 A JP 2009122002A
- Authority
- JP
- Japan
- Prior art keywords
- guidance
- information
- traveling direction
- voice guidance
- voice
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/26—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00 specially adapted for navigation in a road network
- G01C21/34—Route searching; Route guidance
- G01C21/36—Input/output arrangements for on-board computers
- G01C21/3626—Details of the output of route guidance instructions
- G01C21/3652—Guidance using non-audiovisual output, e.g. tactile, haptic or electric stimuli
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Automation & Control Theory (AREA)
- Human Computer Interaction (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Instructional Devices (AREA)
- Navigation (AREA)
Abstract
【解決手段】CPU41は、誘導経路上の案内交差点や案内分岐点の進行方向を音声案内する地点に到達したときに、当該案内交差点や案内分岐点の進行方向よりも優先度の高い情報を現在、スピーカ16を介して音声案内している場合には、当該案内交差点や案内分岐点の進行方向よりも優先度の高い情報を継続して音声案内する。また、CPU41は、当該案内交差点や案内分岐点の進行方向に対応する右側振動体73又は左側振動体74を所定の振動の大きさで振動させて、運転者に対して進行方向を報知する(S11〜S13:YES〜S18)。
【選択図】図5
Description
例えば、車の走行状況に応じて案内メッセージや警告メッセージを放声する車載用ナビゲーション装置において、個々に案内メッセージや警告メッセージの放声を要求する複数のメッセージ要求手段と、前記案内メッセージの警告メッセージの優先順位を記憶する優先順位記憶手段と、前記メッセージ要求手段からの要求によりメッセージを放声中に他のメッセージ要求があった場合、前記優先順位記憶手段に記憶された優先順位に基づいて、優先順位の高いメッセージの放声を行う放声制御手段とを備えた車載用ナビゲーション装置がある(例えば、特許文献1参照。)。
また、ナビゲーション制御部13には、扁平型振動モータ等を駆動制御する振動体ECU(ElectronicControl Unit)71が電気的に接続されている。そして、この振動体ECU71には、扁平型振動モータ等で構成されて後述の運転者用シート81(図3参照)に取り付けられた右側振動体73と左側振動体74が電気的に接続されている。
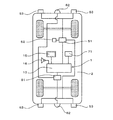
また、振動体ECU71は、ナビゲーション装置1から受信した制御信号に基づいて、運転者用シート81に取り付けられた右側振動体73と左側振動体74を選択的に振動させて、運転者に進行方向を報知するように駆動制御する電子制御ユニットで、各振動体73、74が接続されている(図2参照)。
図2に示すように、現在地検出部11は、GPS31、方位センサ32、距離センサ33、高度計(図示せず)等からなり、自車位置、自車方位等を検出することが可能となっている。
また、液晶ディスプレイ15には、操作案内、操作メニュー、キーの案内、現在地から目的地までの誘導経路、誘導経路に沿った案内情報、交通情報、ニュース、天気予報、時刻、メール、テレビ番組等が表示される。
図3に示すように、車両搭載装置としての運転者用シート81は、運転時に運転者が座る水平状のシートクッション82と、このシートクッション82の後端部に揺動可能に枢支され、運転者を後側から支持するシートバック83とからなっている。
図4に示すように、優先度テーブル101には、各種案内・警告を行う音声案内の情報が優先度の高いほうから、即ち、優先順位の高いほうから「1:危険警告情報」、「2:注意警告情報」、「3:交差点案内情報」、「4:渋滞規制情報」、「5:周辺情報」の順に記憶されている。
図5は優先度テーブル101に記憶される各種情報の優先度に基づいて音声案内を行う音声案内処理を示すメインフローチャートである。図6は図5の「音声案内処理2」のサブ処理を示すサブフローチャートである。尚、図5にフローチャートで示されるプログラムはROM43に記憶されており、CPU41によって所定時間毎に(例えば、約0.1秒〜1秒毎である。)実行される。
一方、誘導経路の経路案内中の場合には(S11:YES)、CPU41は、S12の処理に移行する。
一方、自車位置が案内交差点や案内分岐点の進行方向の音声案内を行う案内地点に到達した場合には(S12:YES)、CPU41は、S13の処理に移行する。S13において、CPU41は、優先度テーブル101を参照して、案内交差点や案内分岐点の進行方向よりも優先度の高い情報、つまり、「1:危険警告情報」又は「2:注意警告情報」を現在、スピーカ16を介して音声案内しているか否かを判定する判定処理を実行する。
図6に示すように、S111において、CPU41は、優先度テーブル101を参照して、案内交差点や案内分岐点の進行方向よりも優先度の低い情報、つまり、「4:渋滞規制情報」又は「5:周辺情報」を現在、スピーカ16を介して音声案内しているか否かを判定する判定処理を実行する。
S113において、CPU41は、案内交差点や案内分岐点の進行方向の音声案内をスピーカ16を介して開始する。
続いて、S117において、CPU41は、上記S115で案内交差点や案内分岐点の進行方向の音声案内を中止するまでに、当該案内交差点や案内分岐点の進行方向を表す言葉をスピーカ16を介して音声案内したか否かを判定する判定処理を実行する。
一方、現在、スピーカ16を介して出力している案内交差点や案内分岐点の進行方向の音声案内が終了した場合には(S118:YES)、CPU41は、当該サブ処理を終了して、メインフローチャートに戻り、当該処理を終了する。
(B)また、右側振動体73及び左側振動体74をナビゲーション装置1のCPU41が直接駆動制御するようにしてもよい。
2 自車両
11 現在地検出部
12 データ記録部
13 ナビゲーション制御部
16 スピーカ
25 地図情報DB
26 優先度DB
41 CPU
42 RAM
43 ROM
51 カメラECU
52 ドライバカメラ
53 車外カメラ
61 レーダECU
62 ミリ波レーダ
71 振動体ECU
73 右側振動体
74 左側振動体
81 運転者用シート
82 シートクッション
101 優先度テーブル
Claims (6)
- 自車位置を検出する自車位置検出手段と、
地図情報を記憶する地図情報記憶手段と、
目的地までの経路を探索する経路探索手段と、
複数の振動体と、
前記自車位置と前記地図情報に基づいて前記経路上において進行方向の音声案内を行う案内地点に到達した場合に、他の情報の音声案内を行っているか否かを判定する案内状態判定手段と、
前記案内状態判定手段を介して前記他の情報の音声案内を行っていると判定された場合には、前記複数の振動体のうちの前記進行方向に対応する振動体を選択的に振動させるように制御する報知制御手段と、
を備えたことを特徴とする情報報知装置。 - 音声案内する情報の優先度を記憶する優先度記憶手段と、
前記案内状態判定手段を介して前記他の情報の音声案内を行っていると判定された場合には、該他の情報の優先度が前記進行方向の情報の優先度よりも高いか否かを判定する優先度判定手段と、
を備え、
前記報知制御手段は、前記優先度判定手段を介して前記他の情報の優先度が前記進行方向の情報の優先度よりも高いと判定された場合には、該他の情報の音声案内を継続すると共に、前記複数の振動体のうちの前記進行方向に対応する振動体を選択的に振動させるように制御することを特徴とする請求項1に記載の情報報知装置。 - 前記進行方向の音声案内の出力中に、該進行方向の音声案内よりも優先度の高い情報を音声案内する状態になったか否かを判定する音声案内判定手段を備え、
前記報知制御手段は、前記音声案内判定手段を介して前記進行方向の音声案内よりも優先度の高い情報を音声案内する状態になったと判定された場合には、該進行方向の音声案内を中止して該優先度の高い情報を音声案内すると共に、前記複数の振動体のうちの該進行方向に対応する振動体を選択的に振動させるように制御することを特徴とする請求項2に記載の情報報知装置。 - 前記進行方向の音声案内を中止した場合に、該進行方向の音声案内を中止するまでに該進行方向を表す言葉を音声案内したか否かを判定する方向案内判定手段を備え、
前記報知制御手段は、前記方向案内判定手段を介して前記進行方向の音声案内を中止するまでに該進行方向を表す言葉を音声案内したと判定された場合には、前記複数の振動体を振動させないように制御することを特徴とする請求項3に記載の情報報知装置。 - 自車位置と地図情報に基づいて目的地までの経路上における進行方向の音声案内を行う案内地点に到達した場合に、他の情報の音声案内を行っているか否かを判定する案内状態判定工程と、
前記案内状態判定工程で前記他の情報の音声案内を行っていると判定された場合には、複数の振動体のうちの前記進行方向に対応する振動体を選択的に振動させるように制御する報知制御工程と、
を備えたことを特徴とする情報報知方法。 - コンピュータに、
自車位置と地図情報に基づいて目的地までの経路上における進行方向の音声案内を行う案内地点に到達した場合に、他の情報の音声案内を行っているか否かを判定する案内状態判定工程と、
前記案内状態判定工程で前記他の情報の音声案内を行っていると判定された場合には、複数の振動体のうちの前記進行方向に対応する振動体を選択的に振動させるように制御する報知制御工程と、
を実行させるためのプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007297393A JP4831056B2 (ja) | 2007-11-16 | 2007-11-16 | 情報報知装置、情報報知方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007297393A JP4831056B2 (ja) | 2007-11-16 | 2007-11-16 | 情報報知装置、情報報知方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009122002A true JP2009122002A (ja) | 2009-06-04 |
| JP4831056B2 JP4831056B2 (ja) | 2011-12-07 |
Family
ID=40814310
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007297393A Expired - Fee Related JP4831056B2 (ja) | 2007-11-16 | 2007-11-16 | 情報報知装置、情報報知方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4831056B2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011065561A (ja) * | 2009-09-18 | 2011-03-31 | Yupiteru Corp | 車載用電子機器及びプログラム |
| JP5657809B2 (ja) * | 2011-10-06 | 2015-01-21 | 本田技研工業株式会社 | 脇見検出装置 |
| JP2016050817A (ja) * | 2014-08-29 | 2016-04-11 | 怡利電子工業股▲ふん▼有限公司 | ナビゲーション情報及び安全運転のヒントを同時に表示する装置 |
| CN109884579A (zh) * | 2017-12-06 | 2019-06-14 | 三星电子株式会社 | 定向声学传感器以及包括定向声学传感器的电子设备 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0997396A (ja) * | 1995-09-29 | 1997-04-08 | Aqueous Res:Kk | 車載用案内装置 |
| JP2000065585A (ja) * | 1998-08-20 | 2000-03-03 | Alpine Electronics Inc | 車載用ナビゲーション装置 |
| JP2000221051A (ja) * | 1999-02-03 | 2000-08-11 | Mazda Motor Corp | ナビゲーションシステムの報知装置 |
| JP2004170359A (ja) * | 2002-11-22 | 2004-06-17 | Denso Corp | カーナビゲーション装置 |
-
2007
- 2007-11-16 JP JP2007297393A patent/JP4831056B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0997396A (ja) * | 1995-09-29 | 1997-04-08 | Aqueous Res:Kk | 車載用案内装置 |
| JP2000065585A (ja) * | 1998-08-20 | 2000-03-03 | Alpine Electronics Inc | 車載用ナビゲーション装置 |
| JP2000221051A (ja) * | 1999-02-03 | 2000-08-11 | Mazda Motor Corp | ナビゲーションシステムの報知装置 |
| JP2004170359A (ja) * | 2002-11-22 | 2004-06-17 | Denso Corp | カーナビゲーション装置 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011065561A (ja) * | 2009-09-18 | 2011-03-31 | Yupiteru Corp | 車載用電子機器及びプログラム |
| JP5657809B2 (ja) * | 2011-10-06 | 2015-01-21 | 本田技研工業株式会社 | 脇見検出装置 |
| JPWO2013051306A1 (ja) * | 2011-10-06 | 2015-03-30 | 本田技研工業株式会社 | 脇見検出装置 |
| US9248796B2 (en) | 2011-10-06 | 2016-02-02 | Honda Motor Co., Ltd. | Visually-distracted-driving detection device |
| JP2016050817A (ja) * | 2014-08-29 | 2016-04-11 | 怡利電子工業股▲ふん▼有限公司 | ナビゲーション情報及び安全運転のヒントを同時に表示する装置 |
| CN109884579A (zh) * | 2017-12-06 | 2019-06-14 | 三星电子株式会社 | 定向声学传感器以及包括定向声学传感器的电子设备 |
| CN109884579B (zh) * | 2017-12-06 | 2024-04-19 | 三星电子株式会社 | 定向声学传感器以及包括定向声学传感器的电子设备 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4831056B2 (ja) | 2011-12-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4929997B2 (ja) | 運転支援装置 | |
| JP4789945B2 (ja) | 運転支援装置、運転支援方法、運転支援プログラムおよび記録媒体 | |
| JP2008037218A (ja) | 車両制御装置 | |
| JPH1114388A (ja) | 特殊車両報知システム、このシステムに用いる一般車両用ナビゲーション装置、この装置の記録媒体、および上記システムに用いる特殊車両用ナビゲーション装置 | |
| JP2007207155A (ja) | 自走車用安全喚起システム、自走車用安全喚起方法、及び安全喚起用情報処理プログラム | |
| JP2009015498A (ja) | 緊急車両接近報知システム、一般車用装置および緊急車用装置 | |
| JP6217482B2 (ja) | 自動運転支援装置、自動運転支援方法及びプログラム | |
| RU2768687C1 (ru) | Способ управления движением и устройство управления движением для транспортного средства | |
| JP2008224361A (ja) | 車載電子装置、車両用通信システム | |
| JP2009145099A (ja) | ナビゲーション装置 | |
| JP2018165888A (ja) | 車載端末および自動運転終了事前警告方法 | |
| JP4831056B2 (ja) | 情報報知装置、情報報知方法及びプログラム | |
| JP2011069640A (ja) | 渋滞発生予防装置及び渋滞発生予防システム | |
| JP2011099815A (ja) | ナビゲーション装置及び車線案内方法 | |
| JP2000065585A (ja) | 車載用ナビゲーション装置 | |
| JP4515130B2 (ja) | テレマティクスシステムおよび車載用ナビゲーション装置 | |
| JP4970922B2 (ja) | 車載用ナビゲーション装置及び緊急情報提供方法 | |
| JP2007163274A (ja) | ナビゲーション装置 | |
| JP2007122472A (ja) | 運転支援システムおよびプログラム | |
| JP3757214B2 (ja) | 報知装置、車両運転支援システム、車両運転支援方法及び車両運転支援プログラム | |
| JP2004355055A (ja) | 車載用電子機器及びナビゲーション方法 | |
| JP2008197703A (ja) | 車両の情報提供装置 | |
| JP4812767B2 (ja) | 運転支援装置、運転支援方法、運転支援プログラムおよび記録媒体 | |
| JP4831054B2 (ja) | 情報報知装置、情報報知方法及びプログラム | |
| JP2006193095A (ja) | 走行支援システム、及び走行支援装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100310 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110823 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110824 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110905 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140930 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |