JP2007168475A - 車両の発進補助装置 - Google Patents
車両の発進補助装置 Download PDFInfo
- Publication number
- JP2007168475A JP2007168475A JP2005364940A JP2005364940A JP2007168475A JP 2007168475 A JP2007168475 A JP 2007168475A JP 2005364940 A JP2005364940 A JP 2005364940A JP 2005364940 A JP2005364940 A JP 2005364940A JP 2007168475 A JP2007168475 A JP 2007168475A
- Authority
- JP
- Japan
- Prior art keywords
- predetermined value
- clutch
- accelerator pedal
- service brake
- detecting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims description 8
- 230000007423 decrease Effects 0.000 claims description 2
- 238000005299 abrasion Methods 0.000 abstract 1
- 230000001133 acceleration Effects 0.000 abstract 1
- 230000000717 retained effect Effects 0.000 abstract 1
- 230000005540 biological transmission Effects 0.000 description 15
- 238000000034 method Methods 0.000 description 10
- 230000000994 depressogenic effect Effects 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
Images






Landscapes
- Regulating Braking Force (AREA)
Abstract
【課題】クラッチフェーシングの磨耗状態の如何にかかわらず、サービスブレーキの解除タイミングを適正化する。
【解決手段】所定条件が成立した状態でブレーキペダル10を踏み込むと、マスタシリンダ12からブレーキキャリパ20及びホイールシリンダ24へ作動油を供給する油圧配管14及び16に介装された常開式の電磁開閉弁26及び28に通電を開始し、サービスブレーキを作動状態に保持する。そして、発進補助装置30は、アクセルペダルの踏み込みに応じてクラッチトルクTが徐々に増加して第1の所定値以上になると、電磁開閉弁26及び28への通電を停止し、サービスブレーキを解除する。このため、車両が逆行しないクラッチトルクが発生した時点でサービスブレーキが解除されることとなり、そのタイミングの適正化を図ることができる。
【選択図】図1
【解決手段】所定条件が成立した状態でブレーキペダル10を踏み込むと、マスタシリンダ12からブレーキキャリパ20及びホイールシリンダ24へ作動油を供給する油圧配管14及び16に介装された常開式の電磁開閉弁26及び28に通電を開始し、サービスブレーキを作動状態に保持する。そして、発進補助装置30は、アクセルペダルの踏み込みに応じてクラッチトルクTが徐々に増加して第1の所定値以上になると、電磁開閉弁26及び28への通電を停止し、サービスブレーキを解除する。このため、車両が逆行しないクラッチトルクが発生した時点でサービスブレーキが解除されることとなり、そのタイミングの適正化を図ることができる。
【選択図】図1
Description
本発明は、車両の発進補助装置において、サービスブレーキの解除タイミングを適正化する技術に関する。
坂道発進や信号待ちなどのときに、ブレーキペダルを開放しても所定条件が成立するまでサービスブレーキを作動状態に保持することで、車両運転者の労力を軽減する車両の発進補助装置が提案されている。その一例として、特開2004−148861号公報(特許文献1)に記載されるように、摩擦クラッチのクラッチストロークが所定値以下となったときに、サービスブレーキの作動状態が解除されるように制御されるものがある。
特開2004−148861号公報
ところで、摩擦クラッチでは、クラッチフェーシングの磨耗度合に応じて、クラッチが切断状態から半クラッチ状態へと移行するポイントが変化してしまう。このため、従来提案の技術では、クラッチフェーシングの磨耗が進行していると、サービスブレーキが必ずしも適切なタイミングで解除されず、特に、坂道発進において車両が逆行してしまうおそれがあった。
そこで、本発明は以上のような従来の問題点に鑑み、クラッチ接続状態と密接な関連があるクラッチトルクに応じてサービスブレーキを解除することで、クラッチフェーシングの磨耗状態にかかわらず、サービスブレーキの解除タイミングを適正化した車両の発進補助装置を提供することを目的とする。
このため、本発明に係る車両の発進補助装置では、摩擦クラッチを介して伝達されるクラッチトルクが第1の所定値以上になったときに、サービスブレーキの作動状態を解除することを特徴とする。
また、クラッチトルクが第1の所定値以上になったことに加え、クラッチストロークが第2の所定値以下になったときに、サービスブレーキを解除するようにしてもよい。このようにすれば、サービスブレーキの解除が2つの制御パラメータで行われることとなり、その安全性を向上させることができる。
また、クラッチトルクが第1の所定値以上になったことに加え、クラッチストロークが第2の所定値以下になったときに、サービスブレーキを解除するようにしてもよい。このようにすれば、サービスブレーキの解除が2つの制御パラメータで行われることとなり、その安全性を向上させることができる。
ここで、サービスブレーキの解除タイミングを適宜変更すべく、アクセルペダルの操作速度に応じて第1の所定値及び/又は第2の所定値を動的に変更することが望ましい。このとき、第1の所定値としては、アクセルペダルの操作速度が大きくなるにつれて徐々に小さくなるように設定すればよく、第2の所定値としては、アクセルペダルの操作速度が大きくなるにつれて徐々に大きくなるように設定すればよい。このようにすれば、車両発進の緩急操作が反映され、車両運転者の意思に沿った制御を実現することができる。さらに、アクセルペダルの操作速度をその操作状態から間接的に検出するようにすれば、新たなセンサ追加が不要となり、センサ追加によるコスト上昇を防止することができる。
本発明に係る車両の発進補助装置によれば、サービスブレーキが作動状態に保持された状態でアクセルペダルが踏み込まれ、クラッチトルクが徐々に増加して第1の所定値に達すると、サービスブレーキが解除される。このため、摩擦クラッチにおけるクラッチフェーシングの磨耗状態の如何にかかわらず、車両が逆行しないクラッチトルクが発生した時点でサービスブレーキが解除されることとなり、そのタイミングの適正化を図ることができる。
以下、添付された図面を参照して本発明を詳述する。
図1は、サービスブレーキとして、前輪にディスクブレーキ、後輪にドラムブレーキを備えた車両に対して本発明を適用し、車両の発進補助装置を具現化した実施形態を示す。
ブレーキペダル10に連結されたマスタシリンダ12は、2系統に分かれた油圧配管14及び16を介して、前輪18のブレーキキャリパ20及び後輪22のホイールシリンダ24に夫々連通される。また、2系統の油圧配管14及び16には、サービスブレーキの作動状態を保持又は解除すべく、その作動油経路を開閉する常開式の電磁開閉弁26及び28(作動状態保持手段)が夫々介装される。ここで、常開式の電磁開閉弁26及び28を用いることで、例えば、そのソレノイドが故障して作動油経路が閉鎖できなくなっても、サービスブレーキの機能には支障が生じないようにすることができる。
図1は、サービスブレーキとして、前輪にディスクブレーキ、後輪にドラムブレーキを備えた車両に対して本発明を適用し、車両の発進補助装置を具現化した実施形態を示す。
ブレーキペダル10に連結されたマスタシリンダ12は、2系統に分かれた油圧配管14及び16を介して、前輪18のブレーキキャリパ20及び後輪22のホイールシリンダ24に夫々連通される。また、2系統の油圧配管14及び16には、サービスブレーキの作動状態を保持又は解除すべく、その作動油経路を開閉する常開式の電磁開閉弁26及び28(作動状態保持手段)が夫々介装される。ここで、常開式の電磁開閉弁26及び28を用いることで、例えば、そのソレノイドが故障して作動油経路が閉鎖できなくなっても、サービスブレーキの機能には支障が生じないようにすることができる。
一方、発進補助装置の制御系として、コンピュータを内蔵した発進補助制御装置30が設けられる。発進補助制御装置30は、CAN(Controller Area Network)などのネットワークを介して、歯車式変速機の自動変速制御装置32と接続され、自動変速制御パラメータとしてのクラッチトルクTを随時読取可能に構成される。そして、発進補助制御装置30は、そのROM(Read Only Memory)に記憶された制御プログラムによって、クラッチトルクTに応じて電磁開閉弁26及び28を適宜制御する。なお、発進補助制御装置30により制御手段,第1の所定値変更手段及び第2の所定値変更手段が夫々実現されると共に、自動変速制御装置32がトルク検出手段として機能する。
発進補助制御装置30は、エンジン作動中,車両停止,クラッチ切断又は変速機ニュートラル,パーキングブレーキ解除のすべての条件が成立している状態で、ブレーキペダル10が踏み込まれたときに、電磁開閉弁26及び28に通電を開始してサービスブレーキを作動状態に保持する。一方、自動変速制御装置32は、車両運転者のアクセルペダル踏込状態に応じて、摩擦クラッチを切断状態から接続状態へと徐々に接続させる。
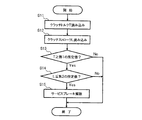
図2は、サービスブレーキが作動状態に保持されている状態で発進変速操作が行われたことを契機として、発進補助制御装置30において所定時間ごとに繰り返し実行される制御プログラムの第1実施形態を示す。
ステップ1(図では「S1」と略記する。以下同様)では、ネットワークを介して自動変速制御装置32からクラッチトルクTを読み込む。
ステップ1(図では「S1」と略記する。以下同様)では、ネットワークを介して自動変速制御装置32からクラッチトルクTを読み込む。
ステップ2では、クラッチトルクTが第1の所定値以上であるか否かを判定する。ここで、第1の所定値は、サービスブレーキを解除すべきか否かを判定するための閾値であって、例えば、坂道発進を行うときに必要なトルクに設定される。そして、クラッチトルクTが第1の所定値以上であればステップ3へと進み(Yes)、サービスブレーキを解除すべく、電磁開閉弁26及び28への通電を停止する。一方、クラッチトルクTが第1の所定値未満であれば処理を終了する(No)。
かかる発進補助装置によれば、サービスブレーキが作動状態に保持された状態で発進変速操作が行われた後、アクセルペダルが踏み込まれると、自動変速制御装置32により摩擦クラッチが徐々に接続される。この過程において、図3に示すように、クラッチトルクTが徐々に増加して第1の所定値に達すると、電磁開閉弁26及び28への通電が停止され、サービスブレーキが解除される。このため、摩擦クラッチにおけるクラッチフェーシングの磨耗状態の如何にかかわらず、車両が逆行しないクラッチトルクが発生した時点でサービスブレーキが解除されることとなり、そのタイミングの適正化を図ることができる。
ここで、第1の所定値は、アクセルペダルの操作速度に応じて動的に変更されるように構成することが望ましい。具体的には、アクセルペダルの操作状態、即ち、アクセルペダルの踏込角度θを検出するポテンショメータなどの操作状態検出手段を設け、発進補助制御装置30は、アクセルペダルの踏込角度θの出力変化からその操作速度を間接的に検出すると共に、アクセルペダルの操作速度に応じて第1の所定値を動的に変更する。その変更特性としては、図4に示すように、アクセルペダルの操作速度が大きくなるにつれて、第1の所定値が徐々に小さくなるようにすればよい。この場合、発進補助制御装置30が操作速度検出手段として機能する。
このようにすれば、車両発進の緩急操作を反映して、サービスブレーキの解除タイミングが適宜変更されることとなり、車両運転者の意図に沿った制御を実現することができる。また、アクセル操作状態からアクセル操作速度を間接的に検出することで、新たなセンサ追加を不要とし、センサ追加によるコスト上昇を防止することができる。
ところで、自動変速制御装置32においては、歯車式変速機の自動変速制御パラメータとして、摩擦クラッチのクラッチストロークLを使用している。このため、発進補助制御装置30は、クラッチトルクTに加え、以下の第2実施形態で示すように、自動変速制御装置32からクラッチストロークLを読み込み、これを併せて用いることでその安全性を向上させることができる。この場合、自動変速制御装置32がストローク検出手段として機能する。
ところで、自動変速制御装置32においては、歯車式変速機の自動変速制御パラメータとして、摩擦クラッチのクラッチストロークLを使用している。このため、発進補助制御装置30は、クラッチトルクTに加え、以下の第2実施形態で示すように、自動変速制御装置32からクラッチストロークLを読み込み、これを併せて用いることでその安全性を向上させることができる。この場合、自動変速制御装置32がストローク検出手段として機能する。
図5は、サービスブレーキが作動状態に保持されている状態で発進変速操作が行われたことを契機として、発進補助制御装置30において所定時間ごとに繰り返し実行される制御プログラムの第2実施形態を示す。
ステップ11では、ネットワークを介して自動変速制御装置32からクラッチトルクTを読み込む。
ステップ11では、ネットワークを介して自動変速制御装置32からクラッチトルクTを読み込む。
ステップ12では、ネットワークを介して自動変速制御装置32からクラッチストロークLを読み込む。
ステップ13では、クラッチトルクTが第1の所定値以上であるか否かを判定する。そして、クラッチトルクTが第1の所定値以上であればステップ14へと進む一方(Yes)、クラッチトルクTが第1の所定値未満であれば処理を終了する(No)。
ステップ13では、クラッチトルクTが第1の所定値以上であるか否かを判定する。そして、クラッチトルクTが第1の所定値以上であればステップ14へと進む一方(Yes)、クラッチトルクTが第1の所定値未満であれば処理を終了する(No)。
ステップ14では、クラッチストロークLが第2の所定値以下であるか否かを判定する。ここで、第2の所定値は、サービスブレーキを解除すべきか否かを判定するための閾値であって、例えば、坂道発進を行うときに必要なトルクを発生すると考えられる摩擦クラッチのストロークに設定される。そして、クラッチストロークLが第2の所定値以下であればステップ15へと進み(Yes)、サービスブレーキを解除すべく、電磁開閉弁26及び28への通電を停止する。一方、クラッチストロークLが第2の所定値より大であれば処理を終了する(No)。
かかる発進補助装置によれば、サービスブレーキが作動状態に保持された状態で発進変速操作が行われた後、アクセルペダルが踏み込まれると、自動変速制御装置32により摩擦クラッチが徐々に接続される。この過程において、図6に示すように、クラッチストロークLが第2の所定値に達しても電磁開閉弁26及び28への通電が停止されず、その後、クラッチトルクTが徐々に増加して第1の所定値に達したときに初めて、電磁開閉弁26及び28への通電が停止され、サービスブレーキが解除される。このため、先の第1実施形態の作用及び効果に加え、サービスブレーキの解除が2つの制御パラメータで行われることとなり、その安全性を向上させることができる。
ここで、第2の所定値は、第1の所定値と同様に、アクセルペダルの操作速度に応じて動的に変更される構成とすることが望ましい。その変更特性としては、図7に示すように、アクセルペダルの操作速度が大きくなるにつれて、第2の所定値が徐々に大きくなるようにすればよい。このようにすれば、安全性を向上させつつ、車両発進の緩急操作を反映して、サービスブレーキの作動状態を解除するタイミングが適宜変更されることとなり、車両運転者の意図に沿った制御を実現することができる。
なお、以上説明した実施形態では、自動変速制御装置32からクラッチトルクT及びクラッチストロークLを読み込むようにしたが、これらをトルクセンサ及びストロークセンサから直接読み込むようにしてもよい。この場合、トルクセンサがトルク検出手段に、ストロークセンサがストローク検出手段に夫々該当する。また、サービスブレーキとしては、前輪がディスクブレーキ、後輪がドラムブレーキのものに限らず、公知の各種ブレーキであればよい。
20 ブレーキキャリパ
24 ホイールシリンダ
26 電磁開閉弁
28 電磁開閉弁
30 発進補助制御装置
32 自動変速制御装置
24 ホイールシリンダ
26 電磁開閉弁
28 電磁開閉弁
30 発進補助制御装置
32 自動変速制御装置
Claims (7)
- サービスブレーキを作動状態に保持する作動状態保持手段と、
摩擦クラッチを介して伝達されるクラッチトルクを検出するトルク検出手段と、
前記トルク検出手段により検出されたクラッチトルクが第1の所定値以上となったときに、前記作動状態保持手段によるサービスブレーキの作動状態を解除する制御手段と、
を含んで構成されたことを特徴とする車両の発進補助装置。 - アクセルペダルの操作速度を検出する操作速度検出手段と、
前記操作速度検出手段により検出されたアクセルペダルの操作速度に基づいて、前記第1の所定値を動的に変更する第1の所定値変更手段と、
をさらに備えたことを特徴とする請求項1記載の車両の発進補助装置。 - 前記第1の所定値変更手段は、前記アクセルペダルの操作速度が大きくなるにつれて第1の所定値を徐々に小さくすることを特徴とする請求項2記載の車両の発進補助装置。
- 前記摩擦クラッチのクラッチストロークを検出するストローク検出手段を備え、
前記制御手段は、前記トルク検出手段により検出されたクラッチトルクが第1の所定値以上となったことに加え、前記ストローク検出手段により検出されたクラッチストロークが第2の所定値以下となったときに、前記作動状態保持手段によるサービスブレーキの作動状態を解除することを特徴とする請求項1〜請求項3のいずれか1つに記載の車両の発進補助装置。 - アクセルペダルの操作速度を検出する操作速度検出手段と、
前記操作速度検出手段により検出されたアクセルペダルの操作速度に基づいて、前記第2の所定値を動的に変更する第2の所定値変更手段と、
をさらに備えたことを特徴とする請求項4記載の車両の発進補助装置。 - 前記第2の所定値変更手段は、前記アクセルペダルの操作速度が大きくなるにつれて第2の所定値を徐々に大きくすることを特徴とする請求項5記載の車両の発進補助装置。
- アクセルペダルの操作状態を検出する操作状態検出手段を備え、
前記操作速度検出手段は、前記操作状態検出手段により検出されたアクセルペダルの操作状態からその操作速度を間接的に検出することを特徴とする請求項2又は請求項5に記載の車両の発進補助装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005364940A JP2007168475A (ja) | 2005-12-19 | 2005-12-19 | 車両の発進補助装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005364940A JP2007168475A (ja) | 2005-12-19 | 2005-12-19 | 車両の発進補助装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007168475A true JP2007168475A (ja) | 2007-07-05 |
Family
ID=38295640
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005364940A Pending JP2007168475A (ja) | 2005-12-19 | 2005-12-19 | 車両の発進補助装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007168475A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011121428A (ja) * | 2009-12-09 | 2011-06-23 | Mitsubishi Fuso Truck & Bus Corp | 車両のブレーキ制御装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04201770A (ja) * | 1990-11-30 | 1992-07-22 | Isuzu Motors Ltd | 制動力保持装置 |
| JPH09202159A (ja) * | 1996-01-29 | 1997-08-05 | Toyota Motor Corp | 発進クラッチを備えた車両におけるブレーキ力制御装置 |
| JP2000177549A (ja) * | 1998-12-11 | 2000-06-27 | Akebono Brake Ind Co Ltd | 制動力保持装置 |
| JP2000313321A (ja) * | 1999-04-28 | 2000-11-14 | Honda Motor Co Ltd | ブレーキ力保持装置 |
| JP2004148861A (ja) * | 2002-10-28 | 2004-05-27 | Nissan Diesel Motor Co Ltd | 車両の発進補助装置 |
-
2005
- 2005-12-19 JP JP2005364940A patent/JP2007168475A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04201770A (ja) * | 1990-11-30 | 1992-07-22 | Isuzu Motors Ltd | 制動力保持装置 |
| JPH09202159A (ja) * | 1996-01-29 | 1997-08-05 | Toyota Motor Corp | 発進クラッチを備えた車両におけるブレーキ力制御装置 |
| JP2000177549A (ja) * | 1998-12-11 | 2000-06-27 | Akebono Brake Ind Co Ltd | 制動力保持装置 |
| JP2000313321A (ja) * | 1999-04-28 | 2000-11-14 | Honda Motor Co Ltd | ブレーキ力保持装置 |
| JP2004148861A (ja) * | 2002-10-28 | 2004-05-27 | Nissan Diesel Motor Co Ltd | 車両の発進補助装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011121428A (ja) * | 2009-12-09 | 2011-06-23 | Mitsubishi Fuso Truck & Bus Corp | 車両のブレーキ制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5119768B2 (ja) | 車両の制動保持と発進を制御する車両の制駆動制御装置 | |
| CN110939734B (zh) | 驻车锁止装置 | |
| JP6653556B2 (ja) | 電動車両の制御装置及び制御方法 | |
| JP2008149802A (ja) | 作業車両の制御装置 | |
| KR101294163B1 (ko) | 하이브리드 전기차량의 언덕길 밀림방지 제어방법 | |
| US11198420B2 (en) | System and method for operating a motor vehicle with an electric parking brake | |
| JP2009018706A (ja) | 制御装置 | |
| JPWO2007088590A1 (ja) | 自動二輪車のブレーキ制御方法及びその装置 | |
| JP2009024761A (ja) | 自動変速機の制御装置 | |
| JP2004075055A (ja) | 自動ブレーキ装置 | |
| KR101655163B1 (ko) | 자동변속기 차량의 급출발 방지 장치 및 방법 | |
| US11407388B2 (en) | Electromechanical park brake strategy for transmission park pawl engagement | |
| JP4604748B2 (ja) | 車両の制動制御装置 | |
| JP5628926B2 (ja) | 電子駐車ブレーキシステムを作動停止させる方法 | |
| JP5024072B2 (ja) | ブレーキ制御装置 | |
| JP2007168475A (ja) | 車両の発進補助装置 | |
| JP2006335314A (ja) | 制動制御装置 | |
| JP4810942B2 (ja) | 内燃機関の自動停止装置 | |
| JP2002308077A (ja) | 自動クラッチ付車両における制動制御装置 | |
| JP2006137266A (ja) | 車両の路面摩擦係数判別装置 | |
| JP2007112156A (ja) | 制動制御装置 | |
| JP7202897B2 (ja) | 車両用制御装置 | |
| JP7255515B2 (ja) | シフト制御装置 | |
| JP2001165299A (ja) | 車両用自動変速機のクリープ力制御装置 | |
| JP4534840B2 (ja) | ブレーキ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081126 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20101116 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A977 | Report on retrieval |
Effective date: 20101118 Free format text: JAPANESE INTERMEDIATE CODE: A971007 |
|
| A02 | Decision of refusal |
Effective date: 20110426 Free format text: JAPANESE INTERMEDIATE CODE: A02 |