JP2006296432A - 害虫の検出および駆除 - Google Patents
害虫の検出および駆除 Download PDFInfo
- Publication number
- JP2006296432A JP2006296432A JP2006148590A JP2006148590A JP2006296432A JP 2006296432 A JP2006296432 A JP 2006296432A JP 2006148590 A JP2006148590 A JP 2006148590A JP 2006148590 A JP2006148590 A JP 2006148590A JP 2006296432 A JP2006296432 A JP 2006296432A
- Authority
- JP
- Japan
- Prior art keywords
- pest
- pest control
- circuit
- control device
- sensing circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






























Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08B—SIGNALLING OR CALLING SYSTEMS; ORDER TELEGRAPHS; ALARM SYSTEMS
- G08B23/00—Alarms responsive to unspecified undesired or abnormal conditions
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01M—CATCHING, TRAPPING OR SCARING OF ANIMALS; APPARATUS FOR THE DESTRUCTION OF NOXIOUS ANIMALS OR NOXIOUS PLANTS
- A01M1/00—Stationary means for catching or killing insects
- A01M1/20—Poisoning, narcotising, or burning insects
- A01M1/2005—Poisoning insects using bait stations
- A01M1/2011—Poisoning insects using bait stations for crawling insects
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01M—CATCHING, TRAPPING OR SCARING OF ANIMALS; APPARATUS FOR THE DESTRUCTION OF NOXIOUS ANIMALS OR NOXIOUS PLANTS
- A01M1/00—Stationary means for catching or killing insects
- A01M1/02—Stationary means for catching or killing insects with devices or substances, e.g. food, pheronones attracting the insects
- A01M1/026—Stationary means for catching or killing insects with devices or substances, e.g. food, pheronones attracting the insects combined with devices for monitoring insect presence, e.g. termites
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01M—CATCHING, TRAPPING OR SCARING OF ANIMALS; APPARATUS FOR THE DESTRUCTION OF NOXIOUS ANIMALS OR NOXIOUS PLANTS
- A01M1/00—Stationary means for catching or killing insects
- A01M1/24—Arrangements connected with buildings, doors, windows, or the like
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01M—CATCHING, TRAPPING OR SCARING OF ANIMALS; APPARATUS FOR THE DESTRUCTION OF NOXIOUS ANIMALS OR NOXIOUS PLANTS
- A01M31/00—Hunting appliances
- A01M31/002—Detecting animals in a given area
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01M—CATCHING, TRAPPING OR SCARING OF ANIMALS; APPARATUS FOR THE DESTRUCTION OF NOXIOUS ANIMALS OR NOXIOUS PLANTS
- A01M2200/00—Kind of animal
- A01M2200/01—Insects
- A01M2200/011—Crawling insects
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T29/00—Metal working
- Y10T29/49—Method of mechanical manufacture
- Y10T29/49002—Electrical device making
- Y10T29/49117—Conductor or circuit manufacturing
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Pest Control & Pesticides (AREA)
- Engineering & Computer Science (AREA)
- Insects & Arthropods (AREA)
- Wood Science & Technology (AREA)
- Zoology (AREA)
- Environmental Sciences (AREA)
- General Health & Medical Sciences (AREA)
- Health & Medical Sciences (AREA)
- Toxicology (AREA)
- Business, Economics & Management (AREA)
- Emergency Management (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Catching Or Destruction (AREA)
- Agricultural Chemicals And Associated Chemicals (AREA)
- Micro-Organisms Or Cultivation Processes Thereof (AREA)
Abstract
【課題】本発明は、データ収集および関知技術に関し、より詳細には、1つまたは複数の害虫駆除装置からデータを収集する技術に関するが、それに限られるものではない。
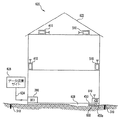
【解決手段】害虫駆除システム20は、地下のシロアリなどの害虫による被害から建築物を保護するように構成される。該システム20は、建築物22の周りに配置した複数の害虫駆除装置110を含む。該システム20は、装置110についての情報を収集する質問機30も含む。質問機30によって装置110から収集したデータを、通信インターフェース41を介してDCU (データ収集ユニット)40に集める。
【選択図】図1
【解決手段】害虫駆除システム20は、地下のシロアリなどの害虫による被害から建築物を保護するように構成される。該システム20は、建築物22の周りに配置した複数の害虫駆除装置110を含む。該システム20は、装置110についての情報を収集する質問機30も含む。質問機30によって装置110から収集したデータを、通信インターフェース41を介してDCU (データ収集ユニット)40に集める。
【選択図】図1
Description
本発明は、データ収集および感知技術に関し、より詳細には、1つまたは複数の害虫駆除装置からデータを収集する技術に関するが、それに限られるものではない。
関連出願の相互参照
本出願は、(2002年3月21日出願の)米国特許出願番号10/103,460の一部継続出願である。この一部継続出願は、(2001年8月9日出願の)米国特許出願番号09/925,392の一部継続出願である。この一部継続出願は、(2000年9月25日出願され、2002年4月4日に英語で公告された)国際特許出願番号PCT/US00/26373および(2000年9月25日出願の)米国特許出願番号09/669,316の一部継続出願である。これらの一部継続出願はともに、(1999年7月21日に出願され、2001年2月1日に英語で公告された)国際特許出願番号PCT/US99/16519の一部継続出願である。本出願は、(2001年3月20日出願の)米国特許出願番号09/812,302にも関連する。
本出願は、(2002年3月21日出願の)米国特許出願番号10/103,460の一部継続出願である。この一部継続出願は、(2001年8月9日出願の)米国特許出願番号09/925,392の一部継続出願である。この一部継続出願は、(2000年9月25日出願され、2002年4月4日に英語で公告された)国際特許出願番号PCT/US00/26373および(2000年9月25日出願の)米国特許出願番号09/669,316の一部継続出願である。これらの一部継続出願はともに、(1999年7月21日に出願され、2001年2月1日に英語で公告された)国際特許出願番号PCT/US99/16519の一部継続出願である。本出願は、(2001年3月20日出願の)米国特許出願番号09/812,302にも関連する。
人間が居住し、家畜および農作物が占める区域から害虫を駆除することは、長い間課題となっている。しばしば問題となる害虫には、様々なタイプの昆虫およびげっ歯類の動物が含まれる。地下のシロアリは、木造の構造物に大きな損害を与える可能性をもつ特に厄介なタイプの害虫である。シロアリおよび他のある種の有害な害虫である昆虫・非昆虫の種類を駆除するために様々な方式が提案されてきた。一手法では、害虫駆除は、保護すべき区域に化学的な殺虫剤を一面散布することを利用する。しかし、環境規制の結果、この手法はあまり望ましいものではなくなりつつある。
近年、殺虫剤化学物質を目標を定めて送達することが進歩してきた。その一例は、Suの米国特許第5,815,090号である。シロアリ駆除を対象とする別の例は、米国インディアナ州インディアナポリス、Zionsville Road、9330番地所在のDow AgroSciences社のSENTRICON(登録商標)システムである。このシステムでは、それぞれシロアリが食する材料を有する複数のユニットを、保護すべき住居の周りの地中に配置する。害虫駆除業者がシロアリの存在に関してこのユニットを定期的に点検して、各ユニットに付随した固有のバーコードラベルを参照して点検データを記録する。所与のユニット内にシロアリが見つかった場合、シロアリの巣に持ち帰られ、そのコロニーを絶滅させることを意図した、ゆっくりと作用する殺虫剤を含む餌を備え付ける。
しかし、より高い信頼性で、かつ/または高いコスト効果でシロアリその他の害虫の活動を感知する技術が望ましい。あるいは、またはそれに加えて、害虫の行動に関するより包括的なデータを収集する能力が求められている。すなわち、害虫駆除およびそれに関連する技術分野におけるさらなる進歩が引き続き求められている。
本発明の一実施形態は、害虫駆除に適用可能な独特の感知技術を含む。別の実施形態では、害虫の活動に関するデータを収集するための独特な技術が提供される。別の実施形態
は、選択した1種または複数種の害虫を検出し根絶する独特な害虫駆除装置を含む。本明細書で用いる「害虫駆除装置」は、1種または複数種の害虫を、感知し、検出し、監視し、餌を備え付け、餌を与え、毒殺し、根絶するのに使用する任意の装置を広く指すものである。
は、選択した1種または複数種の害虫を検出し根絶する独特な害虫駆除装置を含む。本明細書で用いる「害虫駆除装置」は、1種または複数種の害虫を、感知し、検出し、監視し、餌を備え付け、餌を与え、毒殺し、根絶するのに使用する任意の装置を広く指すものである。
本発明の別の実施形態は、独特な害虫駆除システムを含む。このシステムは、複数の害虫駆除装置およびこれらの害虫駆除装置からデータを収集する機器を含む。一実施形態では、この機器は、無線技術を用いて害虫駆除装置と通信し、これらの装置の位置決定を行うように構成することもできる。これらの害虫駆除装置は異なるタイプのものとすることができ、それらの少なくとも一部は、害虫の存在の有無を示すことに加えて、異なるレベルの害虫活動に関する情報を提供するように構成される。
本発明の別の実施形態は、1種または複数種の害虫によって消費または移動されるように動作可能な1つまたは複数の感知素子を含む回路を備えた害虫駆除装置を含む。この回路は、害虫による様々な非ゼロレベルの消費または移動を示す、1つまたは複数の感知素子の電気的かつ/または磁気的な特性を監視する。
別の実施形態では、センサは、互いに分離または除去されるように動作可能な1つまたは複数の部分と、これら1つまたは複数の部分がセンサから除去または分離されるのに応じて変化する電気容量に対応する特性を監視するように動作可能な回路とを含む。このような分離または除去は、害虫による消費または移動、機械的手段による摩耗、腐食または摩損、および/または化学反応のために生じ得る。したがって、このセンサを使用して、様々な害虫の活動、機械的な動作および化学的な変化を監視することができるが、これらはほんの一例である。
本発明の別の実施形態では、1つまたは複数の害虫駆除装置を設置する。これらはそれぞれ、1種または複数種の害虫用のそれぞれの餌、それぞれの害虫センサおよびそれぞれの害虫センサに接続されたそれぞれの通信回路を含む。これらの害虫駆除装置の1つに刺激を与えて、それぞれの通信回路をアクティベーション(activation)させる。この刺激に応答する形で、それぞれの害虫センサについての状態情報を受信する。
別の実施形態では、害虫駆除装置は、1種または複数種の害虫によって消費または移動されるように動作可能な餌と、害虫感知回路と、害虫感知部材の状態を監視する監視回路とを含む。この監視回路は、1つまたは複数の指示器と、これら1つまたは複数の指示器によって、害虫感知回路についての情報を磁界に応答して提供する装置とを含む。
本発明の別の実施形態は、餌、害虫感知部材およびこの害虫感知部材の状態を監視する監視回路を含む害虫駆除装置を設置するステップと、この害虫駆除装置に磁界を印加して監視回路の動作を刺激するステップと、印加された磁界に応答して監視回路から害虫感知部材についての情報を提供するステップとを含む。一形態では、この害虫駆除装置は、情報を提供する1つまたは複数の視覚的な指示器を含む。あるいは、またはそれに加えて、操作者の制御によるワンドなどを使用して外部から磁界を印加することができ、この監視回路はこの磁界に応答する磁気スイッチを含む。
本発明の1つの目的は、害虫駆除に適用可能な独特の感知技術を提供することである。
本発明の別の目的は、害虫の活動に関するデータを収集し、かつ/または、1種または複数種の害虫を検出し根絶するための独特な方法、システム、装置または機器を提供することである。
本発明の別の目的は、害虫の活動に関するデータを収集し、かつ/または、1種または複数種の害虫を検出し根絶するための独特な方法、システム、装置または機器を提供することである。
本発明の他の実施形態、形式、態様、機能および目的は、本明細書に含まれる図面およ
び説明から明らかであろう。
び説明から明らかであろう。
次に、本発明の原理の理解を促すために、図面に示す実施形態を参照し、それを説明するために特別な表現を用いる。ただし、それによって、本発明の範囲が限定されるものではないことを理解されたい。ここで説明する実施形態における任意の変更およびさらなる改変、ならびにここで説明する本発明の原理のさらなる適用例は、本発明が関連する分野の技術者には普通に想起されるであろうと企図されている。
図1に、本発明の一実施形態の害虫駆除システム20を示す。システム20は、地下のシロアリなどの害虫による被害から建築物22を保護するように構成される。システム20は、建築物22の周りに配置した複数の害虫駆除装置110を含む。図1では、見易いように、装置110のいくつかのみを参照数字で具体的に示した。システム20は、装置110についての情報を収集する質問機30も含む。質問機30によって装置110から収集したデータを、通信インターフェース41を介してDCU(データ収集ユニット)40に集める。
さらに図2を参照すると、システム20の動作のある種の態様が示されている。図2に、無線通信技術を用い、質問機30を操作して、少なくとも部分的に地面Gの下に配置した害虫駆除装置110に対して質問を行う害虫駆除業者Pを示す。この例では、地面G全体を走査して、設置した装置110との無線通信を確立するのに好都合な手持ち型質問機30を示す。システム20およびその動作の追加の態様を図8〜10に関して説明するが、まず、図3〜7を参照して、代表的な害虫駆除装置110に関するさらなる詳細を説明する。
図3〜7に、害虫駆除装置110の様々な特徴を示す。まず害虫を検出するために、害虫駆除装置110は、内部的に害虫監視アセンブリ112で構成される。図3および4をより詳細に参照すると、アセンブリ中心線軸Aに沿って害虫監視アセンブリ112が示されている。軸Aは、図3および4の面内にあり、図4の面は、図3の面に直交している。
害虫監視アセンブリ112は、軸Aに沿って、通信回路サブアセンブリ116の下にセンササブアセンブリ114を含む。センササブアセンブリ114は、2つの餌部材132を含む(図3および6参照)。餌部材132はそれぞれ、選択した1種または複数種の害虫用の餌材料でできている。たとえば、餌部材132はそれぞれ、これらの害虫が好む食べ物である材料製とすることができる。地下のシロアリを対象とした一例では、餌部材132はそれぞれ、殺虫剤成分を含まない軟木ブロックの形態である。シロアリに関する他の例では、1つまたは複数の餌部材132が殺虫剤を含むこともできるし、木材以外の組成、あるいはこれらの特徴の組合せを有することもできる。害虫駆除装置110がシロアリ以外のタイプの害虫を対象とする他の例では、通常、それに応じて異なる組成の各餌部材132を用いる。
センササブアセンブリ114は、センサ150も含む。図3および6に、餌部材132間のセンサ150を示す。図6は、図3よりも完全な害虫駆除装置110の組立図である。図4および6に示すように、センサ150は全体的に細長く、端部152bの反対側に端部152aを有する。図4に、センサ150の中間部分が、152aおよび152bの部分を分ける1対の隣接した破線で示されている。センサ150の図を不明瞭にするのを避けるために、図4には餌部材132は示さない。
センサ150は基板151を含む。基板151は、図4の破断図に示す導電ループまたは経路154の形で感知素子153aを提供するように配置した導体153を担持する。
図4の破線で示す中間センサ部分に沿って、経路154の4つの部分が、(図示しない)ほぼ真っ直ぐな平行経路に沿って続き、それに応じて、破線の一方で終わる端部152aの4つの経路部分と、破線の他方で終わる端部152bの4つの経路部分がつながる。経路154は、端部152aの基板縁部155に隣接する1対の電気接点パッド156で終端する。
図4の破線で示す中間センサ部分に沿って、経路154の4つの部分が、(図示しない)ほぼ真っ直ぐな平行経路に沿って続き、それに応じて、破線の一方で終わる端部152aの4つの経路部分と、破線の他方で終わる端部152bの4つの経路部分がつながる。経路154は、端部152aの基板縁部155に隣接する1対の電気接点パッド156で終端する。
基板151および/または導体153は、害虫監視アセンブリ112で監視中の害虫により消費または移動されやすい1つまたは複数の材料からなる。これらの材料は、問題の1種または複数種の害虫用の食用物質、非食用物質、あるいはその2つの組合せとすることができる。実際、非食用物質からなる材料は、餌部材132など隣接する食用材料の消費中に容易に移動することがわかっている。基板151または導体153が消費または移動されると、最終的に経路154が変化する。以下により詳細に説明するように、この変化を利用して、経路154の1つまたは複数の対応する電気特性を監視することにより、害虫の存在を示すことができる。あるいは、餌部材132のある程度の消費または移動により、経路154の導電率を検出可能に変化させるのに十分な機械的な力が加わるように、餌部材132に対して、基板151および/または導体153の向きを決めることができる。この代替形態では、問題の害虫によって基板151および/または導体153が直接消費または移動される必要はない。
害虫監視アセンブリ112は、センササブアセンブリ114に接続された回路サブアセンブリ116をさらに含む。回路サブアセンブリ116は、センササブアセンブリ114の経路154の1つまたは複数の電気特性の変化で示される害虫の活動を検出し、それを通信するように構成される。回路サブアセンブリ116は、通信回路160と、通信回路160をセンササブアセンブリ114のセンサ150に脱着可能に結合する1対の接続部材140とを収容する回路筐体118を含む。以下に、図8〜10に関して、この構成の様々な動作上の態様を説明する。筐体118は、軸A周りにそれぞれほぼ円形の外周を有するカバー部120、Oリング124およびベース130を含む。図4に、図3に比べてより完全に組み立てられた筐体118を示す。カバー部120は、内部リップ123と境界を接する空洞122を画定する。ベース130は、Oリング124を受けるように寸法設定した(隠れ線で示す)溝131を画定し、また、ベース130にカバー部120を組み付けるときに内部リップ123に係合するように構成された外部フランジ133も含む(図4参照)。
通信回路160は、カバー部120とベース130の間に配置する。通信回路160は、コイルアンテナ162と、回路コンポーネント166を載荷するプリント配線ボード164とを含む。図5も参照すると、ベース130、接続部材140および無線通信回路160のアセンブリの上面図が示されている。図5では、軸Aは紙面に直交しており、そのように標示した十字線で示す。ベース130は、プリント配線ボード164を貫通する取付け穴に係合する支柱132を含む。ベース130は、合わせて組み立てる際に、コイルアンテナ162に係合し、それをベース130およびプリント配線ボード164に対して固定関係に維持する取付け部134も含む。図4に一番よく示されるように、ベース130は、4つの支持部136をさらに含み、それらをそれぞれ貫通する開口137を画定する。ベース130は、隣接する対の支持部136間で中央に位置する突起部138を備えた形状になっている。突起部138は、(図3に隠れ線で示す)陥凹部139を画定する。
図3〜5を全体的に参照すると、接続部材140はそれぞれ、1対の接続ナブ146を含む。各ナブ146は、それぞれの接続部材140の対向する端部から延びるくびれ147および頭部145を有する。各接続部材140ごとに、対応する対のナブ146間に突起部148が配置される。突起部148は、陥凹部149を画定する。接続部材140は
、導電エラストマ材料で形成される。一実施形態では、各接続部材140は、米国07016ニュージャージー州Cranford、Dermody Street、129番地所在のTECKNIT社から入手可能なコンパウンド862などの炭素含有シリコーンゴム製である。ただし、他の実施形態では、異なる組成のものを用いることができる。
、導電エラストマ材料で形成される。一実施形態では、各接続部材140は、米国07016ニュージャージー州Cranford、Dermody Street、129番地所在のTECKNIT社から入手可能なコンパウンド862などの炭素含有シリコーンゴム製である。ただし、他の実施形態では、異なる組成のものを用いることができる。
ベース130に各接続部材140を組み付けるには、突起部148が陥凹部139中を延びる状態で、支持部136のそれぞれの対の開口137を通してナブ146の対応する対を挿入する。各ナブ146の頭部145は、それらが通るそれぞれの開口137よりもわずかに大きく寸法設定する。その結果、挿入時に、頭部145は、それぞれの開口137を完全に通過するまで弾性変形する。頭部145が開口137を通って延びると、くびれ147が開口のへりにしっかりと係合した状態で、頭部145は元の形状に戻る。ナブ146の頭部145およびくびれ147の寸法および形状を適切に設定することによって、ベース130および接続部材140を合わせて組み立てた後で湿気およびごみが入りにくいように、開口137を密封することができる。図5に示すように、組立て後、プリント配線ボード164は、各接続部材140の1つのナブ146に接触する。
接続部材140をベース130に組み付けた後で、溝131内に担持されたOリング124を備えたベース130を空洞122内に挿入することによって、筐体118を組み付ける。挿入時、カバー部120および/またはベース130は弾性変形して、フランジ133が内部リップ123の先まで空洞122内を延び、それによって、カバー部120およびベース130が、「カチッとはまる」タイプの結合状態で互いに係合する。ベース130の外面プロフィールに角度が付いているので、この形態の組立てが容易になる。このようにカバー部120およびベース130を結合すると、Oリング124により、空洞122内に湿気およびごみが入りにくい弾性的なシールが得られる。ベース130に係合するカバー部120の内面は、やはり密封の助けとなり得る相補形プロフィールを有する。
通信回路サブアセンブリ116を組み立てた後で、ベース130が担持する各接続部材140の陥凹部149内に端部152aをアサートすることによって、サブアセンブリ116にセンサ150を組み付ける。接続部材140は、陥凹部149に端部152aを挿入することによってわずかに弾性変形するように寸法設定され、それによって、接続部材140によるバイアス力が端部152aに加えられて、接続部材140に接触してセンサ150がしっかりと保持される。端部152aが接続部材140内に挿入されると、各パッド156は、接続部材140の異なる1つと電気的に接触する。プリント配線ボード164に接触する各ナブ146は、経路154をプリント配線ボード164に電気的に接続する。
図6を参照すると、害虫駆除装置110および害虫監視アセンブリ112の分解図が示されている。図6に、合わせて組み立てたセンササブアセンブリ114および回路サブアセンブリ116を、害虫監視アセンブリ112をユニットとして維持する担持部材190内に組み込んだ状態で示す。担持部材190は、対向する側方部材194に取り付けられたベース192を含むフレームの形をとる。図6では、側方部材194の一方しか完全に見えていないが、他方は、害虫監視アセンブリ112の隠れた側に沿って、同じようにベース192から延びている。側方部材194は、ベース192の反対側のブリッジ196によって互いに連結する。ブリッジ196は、回路サブアセンブリ116の組立て済みの筐体118を受けるような輪郭をもつスペース198を画定するように構成される。
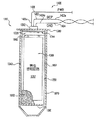
害虫駆除装置110は、たとえば図2に示すように地中配置用に構成された脱着可能なキャップ180を備えたハウジング170を含む。ハウジング170は、開口178と交わるチャンバ172を画定する。害虫監視アセンブリ112および担持部材190は、開口178を通してチャンバ172内に挿入されるように寸法設定される。ハウジング17
0は、端部171bの反対側に端部171aを有する。端部171bは、図2に示すように害虫駆除110を地中に配置する助けとなるテーパ付き端部175を含む。端部175は、(図示しない)開口で終端する。ハウジング170によって画定された複数のスロット174が、チャンバ172と連通する。スロット174は、シロアリがチャンバ172に出入りするのに特によく適したものである。ハウジング170は、害虫駆除装置110を地中に配置する助けとなる複数の突出フランジを有する。図6に、それらのいくつかを、参照数字176a、176b、176c、176dおよび176eで示す。
0は、端部171bの反対側に端部171aを有する。端部171bは、図2に示すように害虫駆除110を地中に配置する助けとなるテーパ付き端部175を含む。端部175は、(図示しない)開口で終端する。ハウジング170によって画定された複数のスロット174が、チャンバ172と連通する。スロット174は、シロアリがチャンバ172に出入りするのに特によく適したものである。ハウジング170は、害虫駆除装置110を地中に配置する助けとなる複数の突出フランジを有する。図6に、それらのいくつかを、参照数字176a、176b、176c、176dおよび176eで示す。
チャンバ172内に入れた後で、害虫監視アセンブリ112をキャップ180でハウジング170内に固定することができる。キャップ180は、ハウジング170の溝179に係合するように配置した下向きのプロング184を含む。ハウジング170上にキャップ180を完全に取り付けた後で、それを回転してラッチ位置でプロング184を係合させて外れにくくする。このラッチ機構は、爪−回り止め構成とすることができる。キャップ180を係合するのにスロット182を使用して、マイナスのねじ回しなどの工具でキャップ180を回転する助けとすることができる。担持部材190、ベース130、カバー部120、ハウジング170およびキャップ180は、予想される環境への暴露によって劣化しにくく、害虫駆除装置110で検出することになると思われる害虫によって変質しにくい材料でできていることが好ましい。一形態では、これらのコンポーネントは、ポリプロピレンのような高分子樹脂、あるいは、米国01201マサチューセッツ州Pittsfield Plastics Avenue、1番地所在のGeneral Electric Plastics社から入手可能なCYCOLAC AR高分子プラスチック材料製である。
一般に、監視すべき区域でハウジング170を少なくとも部分的に地中に設置した後で、チャンバ172内に害虫監視アセンブリ112を配置する。次に図8〜10に関してより詳細に説明するように、アセンブリ112は、害虫の活動を検出し報告するように構成される。一動作モードでは、害虫監視アセンブリ112によって害虫の活動が検出された後で、害虫駆除装置110は、殺虫剤を送達するように再構成される。図7は、このような再構成の一例の分解組立図である。図7では、害虫の活動が検出された後で、害虫駆除装置110は、害虫監視アセンブリ112の代わりに、殺虫剤送達アセンブリ119を使用する。交換は、ラッチするのに必要な方向と反対方向にキャップ180を回すことから始め、ハウジング170からキャップ180を外す。一般に、ハウジング170を少なくとも部分的に地中に設置したままでキャップ180を外す。次いで、担持部材190を引っ張ることによって、ハウジング170から害虫監視アセンブリ112を引き抜く。シロアリなどの害虫に害虫駆除装置110を適用すると、害虫監視アセンブリ112を取り外す前に、チャンバ172内にかなりの量の泥およびごみが蓄積し得ることがわかっている。このような蓄積のために、チャンバ172からの害虫監視アセンブリ112の取外しが妨げられることがある。このため、部材190は、少なくとも18kg(40ポンド)の引抜き力、より好ましくは36kg(80ポンド)の引抜き力に耐えるように構成することが好ましい。
チャンバ172から害虫監視アセンブリ112を取り外した後で、開口178を通して、ハウジング170のチャンバ172内に殺虫剤送達アセンブリ119を配置する。殺虫剤送達アセンブリ119は、チャンバ1172を画定する殺虫剤の餌用の管1170を含む。チャンバ1172は、基質部材1173を含む殺虫剤を有する。管1170は、キャップ1176が係合するように構成されたねじ切り端部1174を有し、キャップ1176は、(図示しない)相補形の内部ねじを有する。キャップ1176は、開口1178を画定する。ハウジング170から害虫監視アセンブリ112を取り外す間あるいはその前後に、センサ150から回路サブアセンブリ116を取り外す。開口1178は、害虫監視アセンブリ112から取り外した後で、回路サブアセンブリ116をしっかりと受ける
ように寸法および形状が設定されている。回路サブアセンブリ116で殺虫剤送達アセンブリ119を構成した後で、それをチャンバ172内に配置し、前に述べたように、キャップ180をハウジング170に係合し直すことができる。
ように寸法および形状が設定されている。回路サブアセンブリ116で殺虫剤送達アセンブリ119を構成した後で、それをチャンバ172内に配置し、前に述べたように、キャップ180をハウジング170に係合し直すことができる。
図8に、図1に示すシステム20の代表的な害虫駆除装置110用の質問機30および害虫監視アセンブリ112の回路を概略的に示す。図8の監視回路169は、集接続部材140によってセンサ150の導体153に接続された通信回路160を全体的に表す。図8では、監視回路169の経路154は、害虫の活動による電気的な閉経路または開経路が得られるセンサ150の能力に相当する単極単投スイッチで示されている。通信回路160は、通電すると2状態ステータス信号を提供するセンサ状態検出器163をさらに含む。ただし、一方の状態は、開経路すなわち高抵抗経路154を表し、他方の状態は、電気的な閉経路すなわち連続経路154を表す。通信回路160は、装置110用の対応する識別信号を生成する識別コード167も含む。識別コード167は、所定のマルチビット2値コードまたは当業者が想起するであろう他の形とすることができる。
通信回路160は、質問機30からコイルアンテナ162を介して受信する外部刺激または励起信号でアクティベーションされる受動RF応答機として構成される。同様に、回路160の検出器163およびコード167は、この刺激信号によって電力が供給される。刺激信号によるアクティベーションに応答して、通信回路160は、コイルアンテナ162によって情報を変調RFフォーマットで質問機30に送信する。この無線送信は、検出器163で判定される餌の状態および識別コード167によって与えられる固有の装置識別子に相当する。
さらに図9を参照すると、通信回路160および監視回路169のさらなる細部が示されている。図9では、破線ボックスは、プリント配線ボード164を表し、それが載荷するコンポーネント166を取り囲んでいる。回路コンポーネント166には、コンデンサC、集積回路IC、抵抗RおよびPNPトランジスタQ1が含まれる。図に示す実施形態では、集積回路ICは、米国85224−6199アリゾナ州Chandler、West Chandler Blvd.、2355番地所在のMicrochip Technologies社から提供されるモデル番号MCRF202の受動型RFID(無線周波数識別素子)である。集積回路ICは、コード167および検出器163を含む。
ICは、コイルアンテナ162およびコンデンサCの並列回路網に接続された2つのアンテナ接続部VAおよびVBも含む。図に示す実施形態では、コンデンサCの容量は約390pF(ピコファラッド)であり、コイルアンテナ162のインダクタンスは約4.16mH(ミリヘンリー)である。ICは、接点VCCおよびVSSを介して安定化直流電位を供給するように構成され、VCCがより高電位である。この電位は、コイルアンテナ162で受信した刺激RF入力から接続部VAおよびVBを介して得られる。ICのVCC接続部は、トランジスタQ1のエミッタおよびセンサ150の電気接点パッド156の一方に電気的に接続される。トランジスタQ1のベースは、電気接点パッド156の他方に電気的に接続される。抵抗Rは、ICのVCC接続部とトランジスタQ1のベースの間に電気的に接続される。トランジスタQ1のコレクタは、ICのSENSOR入力に接続される。完全な状態では、直列に接続された導電経路154と接続部材140は、抵抗Rについて図に示した値である330キロオームに比べて比較的低い抵抗値を示す。したがって、R、接続部材140および導電経路154で形成される分圧器によってトランジスタQ1のベースに与えられる電圧は、トランジスタQ1をオンにするのに十分ではなく、その代わりに、電流はRを通って分流する。その結果、ICへの入力SENSORは、IC内部で(図示しない)プルダウン抵抗を介して、VSSに対して論理レベルがローに維持される。導電経路154の抵抗値が増加して開路状態を示すと、トランジスタQ1のエミッタとベースの電位差が変化してトランジスタQ1がオンになる。それに対応して、I
CのSENSOR入力に供給される電位は、VSSに対して論理レベルがハイになる。このトランジスタQ1および抵抗Rの回路構成は、VCCおよびSENSOR入力の間に直接導電経路154を配置することに比べて、SENSOR入力に供給される論理レベルが反転する効果を有する。
CのSENSOR入力に供給される電位は、VSSに対して論理レベルがハイになる。このトランジスタQ1および抵抗Rの回路構成は、VCCおよびSENSOR入力の間に直接導電経路154を配置することに比べて、SENSOR入力に供給される論理レベルが反転する効果を有する。
他の実施形態では、1つまたは複数のコンポーネントからなる異なる構成を用いて、全体的にまたは別々に通信回路160を形成することができる。一代替構成では、通信回路160は、餌の状態信号または識別信号だけを送信し、両方とも送信することはできない。別の実施形態では、餌の状態または装置識別情報とともに、あるいはそれらを伴わずに、装置110についての異なる変数情報を送信することができる。別の代替形態では、通信回路160は、それ自体の内部電源を有し、選択的にまたは恒久的に、事実上「活動状態」とすることができる。このような代替形態では、外部刺激信号により電力を得る必要はない。実際、その代わりに装置110が通信を開始することができるはずである。別の代替実施形態では、装置110は、能動および受動回路をともに含み得る。
図8に、質問機30の通信回路31も示す。質問機30は、RF刺激信号を生成するRF励起回路32およびRF入力を受信するRXR(RF受信機)回路34を含む。回路32および34はそれぞれ、コントローラ36に動作可能に接続される。回路32および34用に別々のコイルを備えた質問機30を示すが、他の実施形態では、それら両方に同じコイルを使用することができる。コントローラ36は、質問機30のI/O(入出力)ポート37およびメモリ38に動作可能に接続される。質問機30は、回路31に通電するために、一般に、(図示しない)電気化学セルまたはこのようなセルからなる電池の形態の(図示しない)それ自体の電源を有する。コントローラ36は、1つまたは複数のコンポーネントからなり得る。コントローラ36の一例は、メモリ38内にロードされた命令を実行するプログラム可能なマイクロプロセッサベースタイプのものである。他の例では、コントローラ36は、プログラム可能なデジタル回路の代わりに、またはそれに加えて、アナログ計算回路、配線式状態機械論理その他の装置のタイプで定義することができる。メモリ38は、揮発性または不揮発性の種類の1つまたは複数のソリッドステート型半導体コンポーネントを含み得る。あるいは、またはそれに加えて、メモリ38は、フロッピー(登録商標)またはハードディスクドライブあるいはCD−ROMなど1つまたは複数の電磁的または光学的記憶装置を含み得る。一例では、コントローラ36、I/Oポート37およびメモリ38は、同じ集積回路チップ上に統合して提供される。
I/Oポート37は、質問機30から図1に示すデータ収集ユニット40にデータを送信するように構成される。再度、図1を参照して、データ収集ユニット40の別の態様を説明する。ユニット40のインターフェース41は、I/Oポート37を介して質問機30と通信するように構成される。ユニット40は、装置110について質問機30から得られた情報を記憶し処理するためのプロセッサ42およびメモリ44も含む。プロセッサ42およびメモリ44は、コントローラ36およびメモリ38についてそれぞれ説明したものに類似して様々に構成することができる。さらに、インターフェース41、プロセッサ42およびメモリ44は、同じ集積回路チップ上に統合して提供することができる。
したがって、図に示す実施形態では、質問機30が、範囲内に存在する装置110に刺激信号を送信すると、通信回路160は、質問機30に餌の状態および識別子情報を送信する。質問機30のRF受信機回路34は、装置110から情報を受信し、コントローラ36による操作およびメモリ38内への記憶が行われるように調整しフォーマットする適切な信号を提供する。装置110から受信したデータは、I/Oポート37をインターフェース41に動作可能に接続することによって、データ収集ユニット40に送信することができる。
ユニット40は、質問機30に接続されるように適合され、質問機30からデータを受信し、それを記憶するようにプログラムされたラップトップ型パーソナルコンピュータ、ハンドヘルド型またはパーム型コンピュータ、あるいは他の専用あるいは汎用の種類の計算装置の形で提供することができる。別の実施形態では、ユニット40は、質問機30に対して相対的に離して配置することができる。この実施形態では、1つまたは複数の質問機30が、電話システムまたはインターネットなどのコンピュータネットワークのような確立された通信媒体を介してユニット40と通信する。別の実施形態では、質問機30がなく、ユニット40は、通信回路160と直接通信するように構成される。質問機30および/またはユニット40は、配線式インターフェースを介して1つまたは複数の害虫駆除装置と通信するように構成される。他の実施形態では、当業者が想起するように、質問機30、データ収集ユニット40および装置110で異なるインターフェースおよび通信技術を利用することができる。
地下のシロアリを対象とする好ましい実施形態では、基板151は、地中環境で予想される湿度レベルに曝されても寸法が変化しにくい非食用材料から形成することが好ましい。このような寸法が安定した基板は、導電経路154に不慮の変化が生じる可能性がより少ないことがわかっている。比較的寸法が安定した基板151の好ましい一例には、ポリエチレンなどの高分子材料を被覆した紙が含まれる。ただし、他の実施形態では、基板151は、湿気に曝されると寸法が変化し得るもの、あるいは、またはそれに加えて、標的とする害虫が食料として好む1つまたは複数のタイプの材料を含むものを含めて、他の材料や化合物から構成することができる。
いくつかの応用例では、銀含有導体など、ある種の金属ベースの導電体が、通常、害虫駆除装置を使用する環境に共通する水溶液中で容易にイオン化する傾向があることがわかっている。こうした状況では、生じた電解質溶液によって、害虫駆除装置の導電経路の電気的な短絡やブリッジ化が生じることがあり、その結果、おそらくは装置の性能が適切に発揮されないことになる。意外にも、炭素ベースの導体により、電気的な短絡やブリッジ化の可能性がかなり減ることもわかっている。したがって、このような実施形態では、非金属、炭素含有インク化合物で経路154を形成することが好ましい。このようなインクの一製造者は、米国ミシガン州Port Huron、Washington Ave.、600番地所在のAcheson Colloids社である。導体153を構成する炭素含有導電インクは、シルクスクリーン印刷、パッド印刷またはインクジェット式計量分配技術、あるいは当業者が想起するであろう他の技術を利用して、基板151上に被着させることができる。
一般に選択する金属導体に比べ、炭素ベースの導体の電気抵抗率はより大きくなり得る。好ましくは、炭素含有インク化合物の体積抵抗率は、約0.001Ω−cm(オーム・センチメートル)以上である。より好ましい実施形態では、炭素含有材料からなる導体153の体積抵抗率は、0.1Ω−cm以上である。さらにより好ましい実施形態では、炭素含有材料からなる導体153の体積抵抗率は、約10Ω−cm以上である。他の実施形態では、導体153は、当業者が想起するであろう異なる組成または体積抵抗率を有し得る。
別の実施形態では、害虫駆除装置の環境で予想される水溶液中で実質的にイオン化されない他の導電素子および/または化合物が、害虫駆除装置の導体用に企図される。本発明の別の実施形態では、電気的なブリッジ化や短絡の危険性がある金属ベースの導体を使用する。
図1〜9を全体的に参照して、システム20のある種の動作上の態様をさらに説明する。一般に、装置110が質問機30の所定の距離の範囲内にあるとき、励起回路32が装
置110の回路169をアクティベーションさせるのに適したRF信号を生成するように質問機30を構成する。一実施形態では、周期的に、この刺激信号の生成を自動的に促すようにコントローラ36を構成する。別の実施形態では、操作者が、質問機30に接続された(図示しない)操作者用の制御部からこの刺激信号を要求することができる。このような操作者による要求は、自動要求モードの代替形態または追加の要求モードとすることができる。質問機30は、必要に応じて操作者に質問の状況を提供する(図示しない)従来型の視覚的なあるいは可聴式の指示器を含み得る。
置110の回路169をアクティベーションさせるのに適したRF信号を生成するように質問機30を構成する。一実施形態では、周期的に、この刺激信号の生成を自動的に促すようにコントローラ36を構成する。別の実施形態では、操作者が、質問機30に接続された(図示しない)操作者用の制御部からこの刺激信号を要求することができる。このような操作者による要求は、自動要求モードの代替形態または追加の要求モードとすることができる。質問機30は、必要に応じて操作者に質問の状況を提供する(図示しない)従来型の視覚的なあるいは可聴式の指示器を含み得る。
さらに図10のフローチャートを参照すると、本発明の別の実施形態のシロアリ駆除プロセス220が示されている。プロセス220の段階(stage)222では、保護すべき区域に対して離間した位置関係で複数の害虫駆除装置110を設置する。非限定的な例として、図1に、保護すべき建築物22の周りに配置した複数の装置110の可能な一配置図を示す。図2に示すように、これらの装置の1つまたは複数を、少なくとも部分的に地下に配置することができる。
プロセス220では、まず、害虫監視アセンブリ112を備えた装置110をそれぞれ設置する。各害虫監視アセンブリ112は、地下のシロアリが食料として好む1対の監視タイプの餌部材132を含むが、殺虫剤は含まない。あるコロニーのシロアリが食料源への経路を確立すると、シロアリはこの食料源に戻る傾向があることがわかっている。したがって、保護が望まれる区域または構造、たとえば建築物22の近辺に存在し得るこのようなシロアリによる経路を確立するために、まず、監視用の構成で装置110を配置する。
装置110が定位置に配置されると、段階224でそれらのマップが生成される。このマップは、設置した各装置110用のコード化した識別子に対応するしるしを含む。一例では、この識別子は各装置110に固有なものである。次に、プロセス220の害虫監視ループ230は、段階226に進む。段階226では、設置した装置110を定期的に探し出し、質問機30でそれぞれの無線通信回路160に質問を行うことよって各装置110からデータをロードする。このデータは、餌の状態および識別情報に相当する。こうすると、目視検査を行うために各装置110を引き抜くか、あるいは開ける必要なく、所与の装置110内における害虫の活動を容易に検出することができる。さらに、こうした無線通信技術により、電子データベースを確立し構築することができ、それをデータ収集装置40にダウンロードして長期間保存することができる。
地下の害虫監視装置110は、長い間に位置を変え、さらに地中深く押し込まれる傾向があるので、探し出すのが難しくなり得ることを理解されたい。さらに、地中の監視装置110は、周囲の植物の成長によって隠された状態になり得る。一実施形態では、質問機30が最も近くにある装置110としか通信しないように、質問機30および複数の装置110を構成する。この技術は、質問機30と各装置110の通信範囲および装置110の相互の位置を適切に選択することによって実施することができる。したがって、質問機30を使用して地面に沿ってある経路を走査または掃引し、それによって、個々の装置110と連続して通信を行うことができる。このような実施形態では、質問機30によって提供される各装置110との無線通信サブシステム120により、視覚的または金属検知的なより限定された手法とは異なり、装置110の設置後、所与の装置を探し出すより信頼性の高い手順および手段が提供される。実際、この位置決定手順を、各装置に固有な識別子および/または段階224で生成したマップとともに用いて、段階226でより迅速に現場を点検することができる。別の実施形態では、操作者の制御による通信範囲調節機能を質問機30に提供することによって(図示せず)、この位置決定操作をさらに強化して、所与の装置の位置決定をよりよいものにする助けとすることができる。ただし、他の実施形態では、識別信号または連繋マップの送信を含まない無線通信技術によって装置1
10を点検することができる。さらに、代替実施形態では、質問機30による装置110の位置決定は望ましくないことがある。
10を点検することができる。さらに、代替実施形態では、質問機30による装置110の位置決定は望ましくないことがある。
次に、プロセス220は、条件分岐228に進む。条件分岐228では、切断された経路154に相当する状態信号のいずれかがシロアリの活動を示しているかどうかを調べる。条件分岐228での検定が否定的な場合、監視ループ230は段階226に戻り、再度、質問機30で監視装置110を監視する。ループ230は、このようにして複数回繰り返すことができる。一般に、ループ230の繰返しの度合いは、数日または数週間程度であるが、変更してよい。条件分岐228での検定が肯定的な場合、プロセス220は段階240に進む。段階240では、害虫駆除業者が、検出された害虫群の近くに殺虫剤を含む餌を配置する。一例では、殺虫剤の配置は、業者がキャップ180を外し、ハウジング170から害虫活動監視アセンブリ130を引き抜くことを含む。次に、この例では、図7に関して説明したように、害虫監視アセンブリ112を殺虫剤送達アセンブリ119に交換して、害虫駆除装置110を再構成する。
他の実施形態では、この交換用の装置は、異なる構成の通信回路を含むか、あるいは通信回路を全く含まない。一代替形態では、1つまたは複数の餌部材132および任意選択でセンサ150を置き換えることによって、既存の害虫感知装置に殺虫剤を付加する。別の実施形態では、害虫監視アセンブリ112の取外しの有無に関わらず、殺虫剤その他の材料を付加する。別の実施形態では、害虫活動を伴う設置済みの装置110に隣接して設置する異なる装置内に殺虫剤を入れる。段階240の殺虫剤配置の操作中、害虫の活動が検出された装置110の近くにいるできるだけ多くのシロアリを元に戻すか、あるいはそのままに保ち、それによって、巣に至る確立された経路が、コロニーの他の害虫群に殺虫剤を送達する使用可能な通り道として働き得ることが望ましい。
段階240の後で、監視ループ250は段階242に進む。段階242では、装置110を継続して周期的に点検する。一実施形態では、害虫駆除業者が、殺虫剤の餌に相当する装置110の検査を目視で実施し、監視モードの他の装置110の検査は、通常どおり、質問機30によって継続して実施する。他の実施形態では、目視検査は、毒餌基質で構成された害虫活動監視アセンブリ130を使用して、電子的な監視で補完または置換するか、あるいは、複数の手法を組み合わせて実施することができる。一代替形態では、監視モードの経路構成に対して相対的にかなり大量の餌が消費されるまで、開路状態の読取り値を与える経路154の切断が通常は起こらないように経路154を変更して、殺虫剤の餌を監視する。他の代替形態では、通常は殺虫剤の餌を監視せず、その代わりにそれらをそのままにしておき、それによって、シロアリが殺虫剤を食べる際にそれらの邪魔をする危険性を減らすことができる。
段階242の後で、プロセス220を継続すべきかどうかを調べる条件分岐244に進む。条件分岐244での検定が肯定的な場合、すなわちプロセス220を継続すべきである場合、条件分岐246に進む。条件分岐246では、より多くの殺虫剤の餌を設置する必要があるかどうかを判定する。害虫の活動がすでに検出された装置については、より多くの餌の補充が必要なことがあり、監視モードのままであった装置110については、新たに発見された害虫の活動に対応して、殺虫剤の餌の設置が必要なことがある。条件分岐246での検定が肯定的な場合、ループ252は段階240に戻り、追加の殺虫剤の餌を設置する。条件分岐246で追加の餌が必要ないと判定された場合、ループ250は段階242に戻ってそれを繰り返す。条件分岐244での検定が否定的でない限りは、このようにしてループ250、252を繰り返す。ループ250、252の繰返しの度合いと、それに対応する段階242の連続的な実施間隔は、数日または数週間程度であるが、変更してよい。条件分岐244での検定が否定的な場合、段階260で装置110を探し出し、取り除き、プロセス220を終了する。
プロセス220の実施中に質問機30で収集したデータを、ときどきユニット40にダウンロードすることができる。ただし、他の実施形態では、ユニット40は任意選択とするか、あるいは含めないでよい。別の代替プロセスでは、段階242におけるさらなる害虫活動の監視が望ましくないことがある。その代わりに、監視ユニットを取り外してよい。別の代替形態では、プロセスの実行の一部として、監視用に構成された1つまたは複数の装置110の再配置または数の増減を行うことができる。他の実施形態では、質問機30の代わりに、1つまたは複数の害虫駆除装置に接続するようにデータ収集ユニットを使用する。さらに、またはその代わりに、質問機30および/またはユニット40との接続は、配線式の通信接続部によって行うことができる。
図11に、本発明の別の実施形態の害虫駆除システム300を示す。図では、同じ参照数字は、上記で述べたものと同じ機能を指す。害虫駆除システム300は、害虫駆除装置310およびデータ収集ユニット390を含む。害虫駆除装置310は、接続部材140によってセンサ350に脱着可能に接続された回路320を含む。
図12の部分組立図をさらに参照すると、センサ350は、電気抵抗回路網353を載荷する基板351を含む。回路網353は、複数の感知素子353aの形の電気抵抗性枝路または基板351に沿って互いに離間して配置された経路354を含む。図11に、抵抗性経路354をそれぞれ、異なる抵抗R1〜R13で概略的に示す。回路網353は、縁部355の接点パッド356から基板端部357まで延びる。回路網353と回路320を合わせて接続して、監視回路369を構成する。
図13の端面図をさらに参照すると、完全に組み立てられ実装された形のセンサ350が示されている。図13に示すように、軸A1の周りで巻き、折り、曲げ、または包むようにセンサ350を構成して、複数の隣接する層360を設ける。それらの一部のみを参照数字で示す。図13の軸A1は、図13の紙面に直交し、それに応じて、そのように標示した十字線で示すことを理解されたい。図11および12に戻って参照すると、回路320は、回路用の筐体318に収容される。筐体318は、害虫駆除装置110用の害虫監視サブアセンブリ114の筐体118のように構成することができる。実際、筐体318は、1対の接続部材140を受けるように構成され、それによって、センサ150のパッド156を回路160に接続するのと同じ方式で、センサ350のパッド356を回路320に電気的に接続する。回路320は、回路320とセンサ350を合わせて接続して監視回路369を形成するときに回路網353に直列に接続される基準抵抗RRを含む。電圧基準VRも、回路網353と基準抵抗RRの間に接続される。Viで示す基準抵抗RRの両端の電圧は、標準の技術を用いて、A/D(アナログデジタル)コンバータ324で選択的にデジタル化される。A/Dコンバータ324からのデジタル出力は、プロセッサ326に供給される。プロセッサ326は、通信回路328に動作可能に接続される。
プロセッサ326は、1つまたは複数のコンポーネントからなり得る。一例では、プロセッサ326は、(図示しない)付随するメモリ中に記憶された命令を実行するプログラム可能なデジタルマイクロプロセッサ構成である。他の例では、プロセッサ326は、プログラム可能なデジタル回路の代わりに、またはそれに加えて、アナログ計算回路、配線式状態機械論理その他の装置のタイプで定義することができる。好ましくは、通信回路320は、A/Dコンバータ324で決定されたデジタル値を記憶する(図示しない)メモリも含む。このメモリは、A/Dコンバータ324またはプロセッサ326に統合するか、あるいはそれらのいずれかまたはそれらの組合せとは別のものとすることができる。
通信回路328は、システム20に関して前に説明した能動型または受動型の無線通信
回路の実施形態などの無線タイプのものである。通信回路328は、プロセッサ326と通信するように構成される。あるいは、またはそれに加えて、通信回路328は、配線式通信用の1つまたは複数のI/O(入出力)ポートを含み得る。
回路の実施形態などの無線タイプのものである。通信回路328は、プロセッサ326と通信するように構成される。あるいは、またはそれに加えて、通信回路328は、配線式通信用の1つまたは複数のI/O(入出力)ポートを含み得る。
集積回路チップまたはユニット中に、1つまたは複数の電圧基準VR、A/Dコンバータ324、プロセッサ326または通信回路328を組み合わせることができる。さらに、回路320およびそれに対応して監視回路369は、外部電源から電力が供給される受動タイプのもの、それ自体の電源を備えた能動型、あるいはそれらの組合せとすることができる。
データ収集ユニット390は、装置310の通信回路328と通信するように構成されたTXR/RXR(能動型無線送受信機)392、TXR/RXR392に接続されたプロセッサ394、インターフェース396およびメモリ398を含む。プロセッサ394およびメモリ398はそれぞれ、データ収集ユニット40のプロセッサ42およびメモリ44と同じにすることもできるし、当業者が想起するであろう異なる構成とすることもできる。インターフェース396は、装置310および/または(図示しない)他の計算装置への任意選択の配線式インターフェースを提供する。データ収集ユニット390は、以下により詳細に説明するように、1つまたは複数の害虫駆除装置から情報を受信し処理するように構成される。
図11〜13を全体的に参照すると、等価抵抗RSで回路網353を表すことができることが理解されよう。ただし、RSは、R1〜R13の関数である(RS=f(R1〜R13))。R1〜R13が既知のとき、直列および並列抵抗に関する標準電気回路解析技法を適用することによってRSを求めることができる。さらに、基準電圧VRに対する分圧器としてRRおよびRSをモデル化することができ、それによって、Vi=VR*(RR/(RR+RS))の式で、A/Dコンバータ324への入力電圧Viを表すことができることを理解されたい。
基板351および/または回路網353は、問題の1種または複数種の害虫によって消費または移動されやすい1つまたは複数の材料で形成される。このような害虫によってセンサ350が消費または移動されると、回路網353の枝路を含む抵抗性経路354は分断され、電気的に開いた状態になる。1つまたは複数の抵抗性経路354が開いた状態になると、RS値が変化する。したがって、抵抗性経路354の相互の抵抗値、RRおよびVRを正しく選択すると、異なる抵抗性経路354の開いた状態および/または開いた経路354の異なる組合せに応じて、複数の異なる値のRSが得られる。
図12と異なり、図13に、1種または複数種の害虫が、基板351および/または回路網353の消費または移動を開始した後のセンサ350を示す。図13に、害虫Tを、害虫の消費または移動によって生じた害虫生成開口370に関連して示す。回路網353に対する害虫生成開口370の位置は、図12に示す隠れ線の重ね合わせ部380に相当する。害虫生成開口370は、センサの外側のへり372から、軸A1近傍のセンサ350の中心に向かって、センサ350のいくつかの層360を部分的に貫通している。害虫生成開口370は、1つまたは複数の部分が別の部分に対して分離または移動したものに相当し、それによって、相対的な位置に応じて、1つまたは複数の抵抗性経路354の開いた状態が生じ得るはずである。このような分離または移動は、害虫の活動のために、センサ350から1片または複数片が除去されて生じ得る。害虫によってセンサ350の小片が除去されない場合でさえ、ある1つのセンサ領域で第1部分が第2部分に対して相対的に分離または移動するが、その第1および第2部分が、別のセンサ領域で互いに結合して残るような害虫の活動によって、依然としてセンサ350の分離または移動が起こり得る。たとえば、図13で、開口370の形成によって、センサ部分374が、センサ部分
376に対して相対的に分離または移動するが、センサ部分374および376は、センサ部分378によって結合したままである。
376に対して相対的に分離または移動するが、センサ部分374および376は、センサ部分378によって結合したままである。
抵抗性経路354を所定の方式で空間的に配置することによって、徐々により大きな度合いの消費および移動を、RSの値、したがってViの変化として全体的に示すようにセンサ350を構成できることをさらに理解されたい。たとえば、図13に示す基板351の配置を用いて、R8およびR9に相当する抵抗性経路354などの抵抗性経路354を、基板の端部357により近づけて、センサの外側のへり372の近くに配置することができる。これらの抵抗性経路354はセンサの外側のへり372により近いので、これらは、他の抵抗性経路354よりも前に害虫と遭遇しやすい。対照的に、ロール状の基板351の中心(軸A1)により近い抵抗性経路354、たとえば、R1、R5およびR10に相当する部分は、害虫がセンサ350を消費し移動させる際に、まず間違いなく最後に害虫に遭遇するところである。したがって、害虫がセンサの外側のへり372から中心に向かって徐々に消費し移動するのに応じてRSが変化するので、それに対応する入力電圧Viを利用して、複数の異なるゼロでないセンサ350の消費または移動の度合いを表すことができる。
プロセッサ326を使用して、A/Dコンバータ324でデジタル化したViに対応する1つまたは複数の値を評価し、それによって、害虫による消費または移動の変化が生じたかどうかを判定することができるはずである。この分析には、ノイズその他の異常値の悪影響を減らす様々な統計技法を含めることができる。さらに、この分析を利用して、消費または移動の割合および時間に対するその割合の変化を求めることができるはずである。これらの結果を、データユニット390による外部問い合わせに応答して、周期的に、ある種の所定のトリガ閾値に基づいてプロセッサ326により通信回路328を介して、あるいは当業者が想起するであろう異なる構成によって提供することができる。
システム20の害虫駆除装置110のように、いくつかの装置310を、複数の装置による害虫駆除システムにおいて離間して配置した関係で使用することができることを理解されたい。装置310は、地中、地表または地上に配置するように構成することができる。さらに、システム20に関して説明したように、質問機とともに装置310を使用して、それらを探し出す助けとすることができる。装置310内で同時に複数の異なる抵抗性回路網構成を使用して、害虫による様々な度合いの消費または移動の検出を容易にすることができるはずであることも理解されたい。別の代替実施形態では、所望の感知回路網を提供する必要に応じて、複数の別々の層を合わせて積み重ね、これらの層を電気的に相互接続することによって多層構成が提供される。別の代替形態では、センサ350は、図13に示すように構成するのではなく、巻かずに単一層構成で使用する。他の実施形態は、当業者が想起するであろう異なる抵抗性感知回路網構成を含む。
図14〜16を参照すると、様々な度合いの害虫活動を求めるための抵抗性回路網を使用する別の害虫駆除システムの実施形態400が示されている。図では、同じ参照数字は、上記で説明したものと同じ機能を指す。システム400は、システム300に関して説明したデータ収集ユニット390および害虫駆除装置410を含む。害虫駆除装置410は、センサ450に接続された回路420を含む。前に説明したように、回路420は、基準抵抗RR、基準電圧VR、A/Dコンバータ324および通信回路328を含む。回路420は、プロセッサ326と物理的に同じ構成であり得るが、以下でさらに説明するセンサ350と450の処理上の差異に対処するように構成されたプロセッサ426も含む。
センサ450は、表面451bの反対側に表面451aを備えた基板451を含む。基板451は、表面451aから表面451bに至る複数の規則的に離間して配置された通
路456を画定する。抵抗性回路網453は、電気抵抗性部材455の形態の複数の感知素子453aからなる。各抵抗性部材455は、異なる通路456を通って延びる。抵抗性部材455は、それぞれ基板表面451aおよび451bに接触する導電層454aおよび454bによって互いに並列に電気的に接続される。この構成では、基板451は、抵抗性部材455および導電層454aおよび454bに対して電気的な絶縁材料からなる。
路456を画定する。抵抗性回路網453は、電気抵抗性部材455の形態の複数の感知素子453aからなる。各抵抗性部材455は、異なる通路456を通って延びる。抵抗性部材455は、それぞれ基板表面451aおよび451bに接触する導電層454aおよび454bによって互いに並列に電気的に接続される。この構成では、基板451は、抵抗性部材455および導電層454aおよび454bに対して電気的な絶縁材料からなる。
回路420と回路網453により全体的に、監視回路469が構成される。特に図14を参照すると、回路網453の並列抵抗性部材455がそれぞれ、抵抗RP1、RP2、RP3、...RPN−2、RPN−1、RPNのうちの1つで概略的に示されている。ただし、「N」は抵抗性部材455の総数である。したがって、回路網453の等価抵抗値RNは、並列抵抗の定理、RN=(1/RP1+1/RP2...+1/RPN)−1から求めることができる。回路網453の等価抵抗RNは、基準抵抗RRとともに基準電圧VRに対する分圧器を形成する。基準抵抗RRの両端の電圧Viは、A/Dコンバータ324に入力される。
基板451、層454aと454b、および/または部材455は、問題の害虫により消費または移動される材料で形成する。さらに、センサ450は、図13に関して説明したように、害虫による消費または移動により、センサ450の一部または複数部分が、センサ450の他の部分に対して相対的に分離または移動することによって、回路網453への抵抗性部材455の電気接続部が開いた状態になるように配置される。図16に、センサ450から材料が分離または移動され、開いた状態の電気接続部になった領域470を示す。図16で、隠れ輪郭線472は、害虫活動前のセンサ450のフォームファクタを示す。より多くの抵抗性部材455が電気的に開いた状態になるにつれ、回路網453の等価抵抗値RNは増加して、回路420で監視されるViの対応する変化が生じ、それによって、害虫による様々な相対レベルの消費または移動の活動が求められる。
一実施形態では、抵抗性部材455はそれぞれほぼ同じ抵抗値を有し、予想される公差内でRP1=RP2=...=RPNとなる。他の実施形態では、抵抗性部材455の抵抗値は、相互に大きく異なり得る。システム300に関して論じたように、プロセッサ426は、Viの変動によって示される消費または移動の変化を分析し、対応するデータをデータ収集ユニット390に送信するように構成される。導電層454aおよび454bは、これらの表面に係合するように適合されたエラストマ接続部または当業者が想起するであろう別の構成を用いて、回路420に接続することができる。
抵抗値の他に、害虫による消費または移動に応じて変化する感知素子の他の電気特性を監視して、害虫活動データを収集することができる。図17〜19を参照すると、本発明の別の実施形態の害虫駆除システム500が示されている。図では、同じ参照数字は、上記で説明したものと同じ機能を指す。害虫駆除システム500は、データ収集ユニット390および害虫駆除装置510を含む。害虫駆除装置510は、回路520およびセンサ550からなる。
特に図17を参照すると、前に説明したように、回路520は、電圧基準VR、A/Dコンバータ324および通信回路328を含む。回路520は、A/Dコンバータ324と通信回路328の間に接続されたプロセッサ526も含む。プロセッサ526は、システム300のプロセッサ326と物理的に同じタイプのものとすることができるが、システム300とは異なるシステム500の態様に対処するように構成される。たとえば、プロセッサ526は、信号制御経路531a、531bおよび531cによって、複数のスイッチ530a、530bおよび530cにそれぞれ動作可能に接続される。プロセッサ526は、それぞれの経路531a〜531cに沿って対応する信号を送信することによ
って、スイッチ530a〜530cを選択的に開閉するように構成される。スイッチ530a〜530cをそれぞれ、単極単投式の動作構成のものとして概略的に示す。スイッチ530a〜530cは、IGFET(絶縁ゲート電界効果トランジスタ)構成などの半導体型のもの、電気機械タイプのもの、それらの組合せ、あるいは当業者が想起するであろう他のタイプのものとすることができる。
って、スイッチ530a〜530cを選択的に開閉するように構成される。スイッチ530a〜530cをそれぞれ、単極単投式の動作構成のものとして概略的に示す。スイッチ530a〜530cは、IGFET(絶縁ゲート電界効果トランジスタ)構成などの半導体型のもの、電気機械タイプのもの、それらの組合せ、あるいは当業者が想起するであろう他のタイプのものとすることができる。
回路520は、スイッチ530cに並列に接続された基準コンデンサCRおよびAMP.(電圧増幅器)523も含む。電圧増幅器523は、入力電圧VQを増幅し、増幅した出力電圧V0を、選択的にデジタル化されるようにA/Dコンバータ324に供給する。
図17では、センサ550は、電極554を備えたコンデンサの形で概略的に示す感知素子553aを含む。回路520およびセンサ550により全体的に、監視回路569が画定される。監視回路569内で、電圧基準VR、スイッチ530a〜530c、基準コンデンサCRおよびセンサ550によって感知回路網553が形成される。感知回路網553では、電圧基準VRにより、接地およびスイッチ530aの一方の端子に電気的に接続される枝路が形成される。スイッチ530aの他方の端子は、電極554およびスイッチ530bの一方の端子に電気的に接続される。スイッチ530bの他方の端子は、共通の電気ノードによって、電圧増幅器523の入力、基準コンデンサCRおよびスイッチ530cの一方の端子に接続される。スイッチ530cは、基準コンデンサCRに並列に接続され、これらの一方の端子はともに接地される。
図18〜19も参照すると、センサ550は、端部557の反対側に端部555を有し、誘電体551および電極554を含む複数の層560からなる。誘電体551は、表面551bの反対側に表面551aを画定する。電極554は、表面551aと接触する表面554aを含む。図に示すように、表面551aおよび554aはほぼ同一の広がりをもつ。
図17に、「開いた電極」構成のコンデンサとしてセンサ550を示す。この構成では、接地への電気的接続が、誘電体551と、おそらくは、誘電体551と接地の間の空気ギャップなどの他の物質とにより行われる。すなわち、センサ550は、接地への所定の経路を含まず、その代わりに、接地結合が変動する可能性が与えられる。図17のセンサ550では、この誘電体結合を破線556による表現で記号化して示す。
誘電体551および/または電極554は、問題の害虫により消費または移動される1つまたは複数の材料からなる。害虫によりこれらの材料が消費または移動されると、誘電体551および/または電極554の一部分が、他の部分に対して取り除かれるか、あるいは分離する。図19に、害虫により消費または移動された領域570を示す。領域570は、図18に示す隠れ線の重ね合わせ部580に相当する。センサ550のこのタイプの機械的な変化により、電極554の電荷Qを保持する能力が変化し、それに対応してセンサ550の容量CSが変化する傾向がある。たとえば、電極表面554aの面積が減少すると、電極554の相対的な電荷保持能力すなわち容量が減少する。別の例では、誘電体の寸法が変化するか、あるいは誘電体の組成が変化すると、一般に、容量が変化する。別の例では、センサ550の一部または複数部分が分離または移動することによって生じる電極554と接地の距離の変化により、電荷保持能力に影響を及ぼすことができる。
次に、図17〜19を全体的に参照して、回路520の一動作モードを説明する。このモードで行われる各測定ごとに、プロセッサ526によって以下の切替えシーケンスが実行される。(1)スイッチ530bを開いた状態で保持しながらスイッチ530aを閉じてセンサ550の両端に電圧基準VRを与え、それによって、電極554上に電荷Qを蓄積する。(2)この充電期間の後で、スイッチ530aを開く。(3)次いで、スイッチ
530cを開いた状態で保持しながらスイッチ530bを閉じて、少なくとも一部の電荷Qを基準コンデンサCRに転送する。(4)この転送の後で、スイッチ530bを再度開く。基準コンデンサCRに転送された電荷TQに対応する電圧VQが増幅器523で増幅され、A/Dコンバータ324に入力電圧として与えられる。A/Dコンバータ324へのデジタル化した入力をプロセッサ526に供給し、かつ/または(図示しない)メモリに記憶させる。この電圧を測定した後で、プロセッサ526によりスイッチ530cを閉じ、そして開くことによって基準コンデンサCRをリセットすることができる。これでこのシーケンスが完了する。基準容量CRよりもはるかに小さいセンサ容量CSについては(CS<<CR)、この構成に関する式CS=CR*(VQ/VR)で容量CSをモデル化することができる。
530cを開いた状態で保持しながらスイッチ530bを閉じて、少なくとも一部の電荷Qを基準コンデンサCRに転送する。(4)この転送の後で、スイッチ530bを再度開く。基準コンデンサCRに転送された電荷TQに対応する電圧VQが増幅器523で増幅され、A/Dコンバータ324に入力電圧として与えられる。A/Dコンバータ324へのデジタル化した入力をプロセッサ526に供給し、かつ/または(図示しない)メモリに記憶させる。この電圧を測定した後で、プロセッサ526によりスイッチ530cを閉じ、そして開くことによって基準コンデンサCRをリセットすることができる。これでこのシーケンスが完了する。基準容量CRよりもはるかに小さいセンサ容量CSについては(CS<<CR)、この構成に関する式CS=CR*(VQ/VR)で容量CSをモデル化することができる。
この切替えシーケンスをときどき繰り返すようにプロセッサ526を構成して、Qの変化およびそれに対応してCSの変化を監視することができる。システム300に関して説明した技法を用いて、プロセッサ526でこのデータを分析して、通信回路328を介して報告することができる。この繰返しは周期的または非周期的とすることができ、通信回路328などの別の装置による要求、または当業者が想起するであろう異なる手段による要求によって行うことができる。
代替実施形態では、バーストモードの電荷/容量の監視を利用することができる。このバーストモードでは、(1)スイッチ530bを開いた状態に保持しながらスイッチ530aを閉じて、電極554の充電および基準コンデンサCRの分離を行い、(2)スイッチ530aを開き、次いで、(3)スイッチ530bを閉じて、電荷を基準コンデンサCRに転送するシーケンスを繰り返すようにプロセッサ526が構成される。このモードでは、スイッチ530cは、これらの繰返し全体を通じて開いた状態のままである。このため、これらの繰返しが実行される際に基準コンデンサCRはリセットされない。所望の回数の繰返しが完了すると(「バースト」)、A/Dコンバータ324により、入力電圧がデジタル化される。これらの繰返しを十分迅速に実行することによって、電極554から基準コンデンサCRに転送される電荷量Qが増加する。このように電荷転送が増加すると、ゲインが相対的に増加する。したがって、1回のバースト当たり実行される繰返し回数によってゲインを制御することができる。基準コンデンサCRは、ある程度の信号平均化をもたらす積分器としても動作する。
他の代替実施形態では、スイッチ530cの代わりに抵抗を使用して、このバーストモードシーケンスを連続的に繰り返し、それによって、同時監視を容易にするように回路網560を動作させることができる。この構成では、スイッチ530cに使用する抵抗および基準コンデンサCRにより、単極ローパスフィルタが画定される。この連続モードは、置換抵抗、基準電圧VRおよびこれらの繰返しを実施する周波数の関数として決まる(単位容量当たりの電位で表す)「電荷ゲイン」を有する。他の代替形態では、ここに参照により組み込む(1997年の)Hal PhillipのCharge Transfer Sensingに記載されているように、演算増幅器(オペアンプ)型積分器または単極の同等物を使用するように回路網560を改変する。他の実施形態では、電荷Q、電圧V0、CSまたはCSに対応する別の値を測定するための、当業者が想起するであろう異なる回路構成を用いることができる。
電極554は、エラストマ接続部または当業者が想起するであろう異なるタイプの接続部で回路520に電気的に接続することができる。代替実施形態では、開いた電極構成ではなくて、接地への画定された経路、あるいは、これら両方の手法の組合せを含むようにセンサ550を構成することができる。他の実施形態は、交互に配置した電極層および誘電体層を、積み重ね、包み、折り、曲げ、または巻いた構成を含み、1つまたは複数のこれらの層を、問題の害虫により消費または移動される材料とする。あるいは、またはそれ
に加えて、センサには、回路網、直列、並列またはこれらの組合せで配置した2つ以上の別々の電極または感知コンデンサを含めることができる。
に加えて、センサには、回路網、直列、並列またはこれらの組合せで配置した2つ以上の別々の電極または感知コンデンサを含めることができる。
他の実施形態では、害虫による消費または移動の他に、1つまたは複数の特性を感知するように、センサ550の電極554を適用することができる。一例では、センサ550は、摩耗、摩損または腐食を検出するように構成される。この構成では、特定の機械的な活動に応じて摩耗し、それに対応して電極554の電荷保持能力が変化するように配設された1つまたは複数の材料でセンサ550を形成する。たとえば、電極554の表面554aの面積は、こうした活動のためにその一部または複数部分が除去される際に減少するはずである。回路520を使用してこの変化を監視し、このセンサで監視中の装置の交換または修理、このような装置の使用の中止、あるいは当業者が想起するであろう別の処置を取る必要を示す閾値よりもこの変化が大きくなったときに報告を行うことができる。
別の例では、1つまたは複数の材料でセンサ550を形成する。これら1つまたは複数の材料は、それらが曝される環境条件の変化、またはこれら1つまたは複数の材料との化学反応に応答して、あるいは当業者が想起するであろう異なる機序によって分離するか、あるいは他の方法で電荷保持能力が減少するように選択する。これらの非害虫用の実施形態では、プロセッサ526の動作は、それに対応して異なり得る。また、通信回路328に加えて、またはその代わりに、配線式接続部、指示器および/または他の装置を使用することができる。
システム300、400および500を全体的に参照すると、センサ350、450、550の1つまたは複数の導電性素子、抵抗性素子または容量性素子は、害虫駆除装置110に関して説明したように、炭素含有インクからなり得る。実際、異なる体積抵抗率を有するインクを使用することによって、素子353aおよび453aなどの様々な感知素子に関して異なる抵抗値を規定することができる。あるいは、またはそれに加えて、電気が通る材料の寸法を変更し、かつ/または、これらの素子に異なる相互接続コンポーネントを使用することによって、異なる抵抗値を規定することができる。さらに、害虫駆除装置110に関して説明したように、ポリエチレンなどの高分子化合物を被覆した紙で基板351、451および/または551を形成して、湿気による寸法変化を減らすことができる。
図20に、害虫駆除装置310、410、510および610を含む第5のタイプの害虫駆除システム620を示す。図では、同じ参照数字は、上記で説明したものと同じ機能を指す。システム620は、データ収集ユニット390を収容する建築物622を含む。システム620は、通信経路624でデータ収集ユニット390に接続された中央データ収集サイト626も含む。通信経路624は、インターネットなどのコンピュータネットワークによる配線式接続、専用電話相互接続、無線リンク、それらの組合せ、あるいは当業者が想起するであろう他の種類のものとすることができる。
システム620では、システム20に関して論じたように使用する害虫駆除装置310を地中に示す。システム620の害虫駆除装置410および510は、建築物622内に配置され、地面レベルまたは地面レベルより上に示されている。害虫駆除装置310、410、510は、無線手段、配線手段、手持ち型質問機30のような別の装置、あるいはそれらの組合せによってデータ収集ユニット390と通信するように構成される。
害虫駆除装置610は、上記の回路420およびセンサ650からなる。センサ650は、感知素子453aからなる回路網453を含む。センサ650では、回路網453が、建築物622の部材628に直接接続される。部材628は、1種または複数種の害虫によって破壊されやすい1つまたは複数の材料からなる。たとえば、標的の害虫のタイプ
がシロアリであるとき、部材628は木材で形成することができる。このため、建築物622の部材628に対する害虫の活動は、害虫駆除装置610によって直接監視される。害虫駆除装置310、410および510のように、害虫駆除装置610は、無線手段、配線手段、手持ち型質問機30のような別の装置、あるいはそれらの組合せによってデータ収集ユニット390と通信する。
がシロアリであるとき、部材628は木材で形成することができる。このため、建築物622の部材628に対する害虫の活動は、害虫駆除装置610によって直接監視される。害虫駆除装置310、410および510のように、害虫駆除装置610は、無線手段、配線手段、手持ち型質問機30のような別の装置、あるいはそれらの組合せによってデータ収集ユニット390と通信する。
中央データ収集サイト626は、それぞれ1つまたは複数の害虫駆除装置110、310、410、510および/または610を有する異なる建築物または区域を監視するように配置された複数のデータ収集ユニット390と接続することができる。
図21に、本発明の別の実施形態の害虫駆除装置システム720を示す。図では、同じ参照数字は、上記で説明したものと同じ機能を指す。システム720は、質問機730および害虫駆除装置710を含む。害虫駆除装置710は、害虫により消費かつ/または移動されるように構成した害虫監視部材732を含む。一例では、部材732は、害虫が食する材料734、たとえばシロアリの場合には木材を含む餌および材料734上の被覆の形の磁気材料736として構成される。磁気材料736は、材料734としての働きをする木材の芯に塗布した磁気インクまたは塗料とすることができる。他の例では、材料734は、通常、標的の害虫によって除去または移動される食料源以外の物質、たとえば地下のシロアリの場合は、閉じたセルフォームで形成することができる。他の例では、材料734は、食料成分および非食料成分からなり得る。
装置710は、磁気標識センサ790に電気的に接続された無線通信回路780をさらに含む。センサ790は、部材732に対して所定の向きに固定され、磁気材料736によって生成された磁界の変化により生じる抵抗値の変化を検出するための一連の磁気抵抗794を備える。したがって、材料736および磁気抵抗794は、代わりに設けられた感知素子753aである。たとえば、部材732が、害虫によって消費、移動またはその他の方法で部材732から除去されると、監視される磁界の変化が生じ得る。センサ790は、部材732の磁気標識を特徴づける手段を提供する。代替実施形態では、センサ790は、単一の磁気抵抗、あるいはホール効果素子またはリラクタンスベースの感知ユニットなどの代替タイプの磁界感知素子に基づくものとすることができる。
通信回路780によって、センサ790からの磁界情報を可変データとして送信することができる。通信回路160に関して説明したように、回路780は、固有の装置識別子および/または別個の餌の状態の情報をさらに送信することができる。回路780、センサ790、あるいはその両方は、本質的に受動型または能動型とすることができる。
質問機730は、装置710の回路780と無線通信を行うように動作可能な通信回路735を含む。一実施形態では、回路780および790は受動型のものであり、回路780は、回路160にようなRFタグの形をとる。この実施形態では、通信回路735は、装置710と無線通信を行うように、質問機30の回路32および34に類似して構成される。他の実施形態では、装置710は、代わりに、またはそれに加えて、能動型無線通信回路および/または配線式通信インターフェースを含むように適合され得る。これらの代替形態では、質問機730はそれに対応して適合され、質問機730の代わりにデータ収集ユニットを使用するか、あるいは、その両方の手法の組合せを用いることができる。
質問機730は、別個の餌の状態の情報および識別情報に加えて、あるいはそれらの代わりに磁気標識情報を受信し、操作し、記憶するように構成される点を除き、質問機30のコントローラ36、I/Oポート37およびメモリ38と同じコントローラ731、I/Oポート737およびメモリ738を含む。装置310、410および610の抵抗特
性または装置510の容量特性のように、磁気標識情報を評価して、害虫の消費行動を特徴づけることができることを理解されたい。この行動を利用して、餌の補充の必要性および害虫に餌を与えるパターンに関する予測を立てることができる。
性または装置510の容量特性のように、磁気標識情報を評価して、害虫の消費行動を特徴づけることができることを理解されたい。この行動を利用して、餌の補充の必要性および害虫に餌を与えるパターンに関する予測を立てることができる。
図22に、本発明の別の実施形態のシステム820を示す。システム820は、害虫駆除装置810およびデータ収集器830を含む。装置810は、問題の害虫によって消費かつ/または移動されるように構成された監視部材832を含む。部材832は、全体にわたって分散させた磁気材料836を伴う基質834を含む。基質834中の複数の粒子として材料836を概略的に示す。基質834は、食料組成、非食料組成、あるいはそれらの組合せを有し得る。
装置810は、通信回路880およびそれに電気的に接続されたセンサ回路890も含む。回路890は、材料836が、消費、移動またはその他の方法で部材832から除去される際に、材料836によって生成される磁界の変化を検出するための、部材832に対して固定された一連の磁気抵抗894を含む。
回路890は、温度、湿度および気圧をそれぞれ検出するように構成された複数のENV.(環境)センサ894a、894b、894cをさらに含む。材料836ならびにセンサ894、894a、894bおよび894cは、代わりに設けられた感知素子853aである。センサ894、894a、894b、894cは、基板838に接続され、付随する機器に適合するデジタルまたはアナログフォーマットで信号を提供することができる。それに対応して、回路890は、センサ894a、894b、894cからの信号を調整しフォーマットするように構成される。回路890は、磁気抵抗894で検出された磁気標識に相当する信号も調整しフォーマットする。回路890によって提供される感知情報は、通信回路880によってデータ収集器830に送信される。装置110に関して説明したように、通信回路880は、別個の餌の状態の情報、装置の識別子、またはその両方を含み得る。回路880および回路890はそれぞれ、受動型、能動型、またはそれらの組合せとすることができ、それに対応して収集器830は、その選択された手法に従って通信するように適合される。
RFタグ技術に基づく回路880の受動型の実施形態では、データ収集器830は、そのコントローラが、回路880によって提供される異なる形態の感知情報を操作し記憶するように構成される点を除き、質問機30と同じに構成される。別の実施形態では、データ収集器830は、能動型送受信機の形態の回路880と通信する標準の能動型送受信機の形態とすることができる。他の実施形態では、データ収集器830および装置810は、データの交換が容易になるように配線式インターフェースで接続される。
図23および24に、本発明の別の実施形態の害虫駆除装置1010を示す。図では、同じ参照数字は同じ機能を指す。害虫駆除装置1010は、図23に示す害虫監視構成1060内に配置された通信回路1020、接続部1040およびセンサ1050を含む。通信回路1020は、アクティベーション装置1022および情報を出力する指示装置1024を含む。通信回路1020は、回路サブアセンブリモジュール1044を形成するように組み立てられた他のコンポーネントも含む。モジュール1044は、様々なコンポーネントを電気的に相互接続するプリント配線ボードおよび/または通信回路1020を機械的に支持する他の部材を含み得る。モジュール1044およびそれに対応して通信回路1020は、接続部1040によってセンサ1050に電気的かつ機械的に接続される。接続部1040は、害虫駆除装置110の接続部材140について説明した導電エラストマ材料および/または当業者が想起するであろう異なる材料または構成を含み得る。
センサ1050は、害虫感知回路1052を担持する基板1051を含む。害虫感知回
路1052は、害虫駆除装置110の導体153について前に説明したように、設置時には所定のレベルよりも小さく、害虫の活動によって変化しやすい電気抵抗を有する導電ループまたは回路網を含む。基板1051および/または害虫感知回路1052は、構成1060で監視する1種または複数種の害虫によって、通常、移動または消費される材料を含む。害虫感知回路1052は、通信回路1020に接続されると、それと協働して監視回路1069を形成する。
路1052は、害虫駆除装置110の導体153について前に説明したように、設置時には所定のレベルよりも小さく、害虫の活動によって変化しやすい電気抵抗を有する導電ループまたは回路網を含む。基板1051および/または害虫感知回路1052は、構成1060で監視する1種または複数種の害虫によって、通常、移動または消費される材料を含む。害虫感知回路1052は、通信回路1020に接続されると、それと協働して監視回路1069を形成する。
害虫監視構成1060は、餌1032をさらに含む。図23の下側の部分に、切断図でその表面を示す。餌1032は、餌部材132または前に説明したその変形形態と同じ構成とすることができる。一構成では、餌1032は、害虫駆除装置110のセンサ150に関連する餌部材132について図3および6に示すように、センサ1050の両側に配置した少なくとも2つの部材の形態をとる。
害虫監視構成1060は、ハウジング1070内に設置し、かつそれから取り外すことができるような携帯型ユニットとして構成する。ハウジング1070は、害虫駆除装置110に関して説明したハウジング170のように、地中に設置するのに適した材料からなり、それに適した形状とすることができる。センサ1050は、接続部1040によって回路サブアセンブリモジュール1044に対して固定し、モジュール1044は、(断面で示す)キャップ1080に固定する。モジュール1044および/またはキャップ1080に連結された(図示しない)1つまたは複数の側部材を含めて、担持部材1090は、構成1060にさらなる機械的な支持を提供する。キャップ1080は、害虫駆除装置110のキャップ180に類似して構成することができ、それによって、図に示すように、装置1022および1024を取り付けることができる。担持部材1090は、害虫駆除装置110の担持部材190に類似して構成することができ、モジュール1044および/またはキャップ1080に対して恒久的に固定するか、あるいはそれらに選択的に結合させることができる。
図24に、概略的な形で通信回路1020を示す。矢印1023で示す方向にスイッチ1022aが押し込まれたときにのみ電気的な接触が行われる「ノーマリオープン」型プッシュボタンスイッチ1022aの形でアクティベーション装置1022をさらに示す。情報を出力するために選択的に点灯させることができるLED(発光ダイオード)1024aの形で指示装置1024を示す。通信回路1020のコンポーネントには、図24に示すように電気的に相互接続された、ほぼ一定の電圧Vを供給するように構成された電気エネルギー源1025、抵抗1026およびNPN型トランジスタ1027も含まれる。
次に、図23および24を全体的に参照して、害虫駆除装置1010の動作を説明する。害虫駆除装置1010は、様々な害虫駆除装置について図2および図20に示すように、1種または複数種の害虫を監視すべき領域に配置されるように構成される。さらに、図に示すように、害虫駆除装置1010は、地中への設置に適したものである。実際、通常の使用中は、キャップ1080がアクセス可能なままの状態で、1つまたは複数の害虫駆除装置1010を少なくとも部分的に地中に設置する。
設置後、操作者は、スイッチ1022aを押すことによって、通信回路1020(およびそれに対応して監視回路1069)の動作を刺激する。それに応答して、トランジスタ1027のエミッタ1027eが、エネルギー源1025によって供給される電圧に対して接地される。エミッタ1027eが接地された状態で、エネルギー源1025からの電圧がLED1024aの両端、およびトランジスタ1027のコレクタ1027cとエミッタ1027e端子の間にかかり、トランジスタ1027が活動状態であるとき、LED1024aが発光することになる。エネルギー源1025とトランジスタ1027のベース1027bの間の電気的な相互接続部が、トランジスタ1027をオンにするのに十分
な電圧レベルをベース1027bに与える場合、トランジスタ1027は、閉じた状態のスイッチ1022aによって活動状態になる。この電気的な相互接続部には、直列に接続された抵抗1026および害虫感知回路1052の抵抗値が含まれる。したがって、害虫感知回路1052の電気抵抗値が所与の閾値以下で、スイッチ1022aが押された場合に、LED1024aが点灯する。しかし、害虫により基板1051および/または害虫感知回路1052が消費または移動されると、その結果生じた回路の変化により、電気抵抗値が十分に大きくなるか、あるいは開路状態が生じ、それによって、スイッチ1022aを押してもトランジスタ1027はもはや活動状態にならなくなり、それに対応してLED1024aが発光しなくなる。
な電圧レベルをベース1027bに与える場合、トランジスタ1027は、閉じた状態のスイッチ1022aによって活動状態になる。この電気的な相互接続部には、直列に接続された抵抗1026および害虫感知回路1052の抵抗値が含まれる。したがって、害虫感知回路1052の電気抵抗値が所与の閾値以下で、スイッチ1022aが押された場合に、LED1024aが点灯する。しかし、害虫により基板1051および/または害虫感知回路1052が消費または移動されると、その結果生じた回路の変化により、電気抵抗値が十分に大きくなるか、あるいは開路状態が生じ、それによって、スイッチ1022aを押してもトランジスタ1027はもはや活動状態にならなくなり、それに対応してLED1024aが発光しなくなる。
通信回路1020の動作を通じて、害虫感知回路1052の電気的な連続性/抵抗値が変化したかどうかを視覚的に示すLED1024aに2状態信号が供給される。この2状態信号を利用して、殺虫剤を付加し、害虫監視構成1060を殺虫剤送達構成に交換し、かつ/または別の処置を促すように害虫駆除装置1010を再構成する時期を決定することができる。このような他の処置には、殺虫剤とともに、あるいは殺虫剤を伴わずに追加の装置を設置することを含めることができる。別の実施形態では、通信回路1020が殺虫剤の消費を示す情報を提供するように、害虫駆除装置1010は最初から殺虫剤を含む餌を備える構成とする。
本発明の一実施形態では、抵抗1026が公称約10,000オームであり、エネルギー源1025が、3ボルトのほぼ一定出力を供給し、かつ1つまたは複数の電気化学セル(たとえば「電池」)の形であり、トランジスタ1027が標準バイポーラ接合スイッチングタイプのものであり、害虫感知回路1052が、害虫駆除装置110に関して説明した導電ループである。他の実施形態では、電気エネルギー源1025、抵抗1026の値、および/またはトランジスタ1027の性質は変わり得る。このような代替構成では、NPNトランジスタ1027の代わりに、PNPバイポーラ接合トランジスタ、FET(電界効果トランジスタ)、電気機械式リレー、またはSSR(ソリッドステートリレー)を使用し、それに対応する回路1020の調整を含み得るが、これらは可能性のほんの一例である。あるいは、またはそれに加えて、エネルギー源1025は、電池以外の形態とすることができ、装置1010の外部に配置することができ、かつ/または、操作者が装置1010に選択的に印加することができる。
あるいは、またはそれに加えて、監視回路1069は、装置についての異なる情報を通信するように適合され得る。たとえば、電圧源1025が動作するかどうかを調べる追加の副回路を含めることができる。別の例では、アクティベーション装置1022および装置1024による出力によって手動で害虫感知回路の質問を行うことを上記害虫駆除装置の無線通信回路に追加して、手動トリガ式の動作テストを提供することができる。別の例では、手動の質問技法を利用して、害虫による様々な非ゼロレベルの消費または移動を出力する。したがって、手動の刺激に応答して、消費または移動の量を定量化する情報を得ることができる。このような実施形態では、装置310、410、510、610、710および/または810のセンサ構成を通信回路1020に適切に適合させて使用し、それによって、スイッチその他の操作者用の入力装置によってアクティベーションさせることができる。このような一形態では、複数のLEDまたは別の視覚的な表示構成により、様々な非ゼロレベルの消費量が出力される。別の形態では、2状態を示す単一のLEDを使用するが、閾値レベルは、所与のゼロでない度合いの消費または移動に相当するように設定する。この閾値は、工場設定とすることもできるし、かつ/または、操作者が制御して設定することもできる。
別の実施形態では、「ノーマリオープン」型スイッチ1022aとは異なるアクティベーション装置を、代わりにまたは追加して使用することができる。一例では、このアクテ
ィベーション装置は、無線RF受信回路の形である。別の例では、このアクティベーション装置は、3状態以上のスイッチの形態または当業者が想起するであろう異なる形態である。他の実施形態では、LED以外の指示装置を使用することができる。このような指示器は、視覚的、可聴式、それらの組合せまたは当業者が想起するであろう異なるタイプのものとすることができる。一例では、この識別装置は、白熱電球または電気機械式の指示器の形態である。別の例では、この指示装置は、アクティベーション装置1022による刺激に応答して監視回路1069により提供される情報を出力するRF信号送信機の形態である。別の形態では、アクティベーション装置1022、指示装置1024および/または通信回路1020の他の機能は、本質的に能動型または受動型であり得る信号応答器の形で提供される。別の形態では、アクティベーション装置1022、指示装置1024および/または通信回路1020の他の機能は、接続部その他の手段によって、装置1010の残りの部分に係合し、かつそれから分離され得るユニットとして構成される。この形態では、このようなユニットを使用して、所望の順序で複数の装置1010のそれぞれに対して手動で係合/分離を行うことによって、複数の装置1010に質問を行うことができるはずである。別の変形形態では、このようなユニットは、複数の装置1010からの情報を保持するように構成することができるはずである。
ィベーション装置は、無線RF受信回路の形である。別の例では、このアクティベーション装置は、3状態以上のスイッチの形態または当業者が想起するであろう異なる形態である。他の実施形態では、LED以外の指示装置を使用することができる。このような指示器は、視覚的、可聴式、それらの組合せまたは当業者が想起するであろう異なるタイプのものとすることができる。一例では、この識別装置は、白熱電球または電気機械式の指示器の形態である。別の例では、この指示装置は、アクティベーション装置1022による刺激に応答して監視回路1069により提供される情報を出力するRF信号送信機の形態である。別の形態では、アクティベーション装置1022、指示装置1024および/または通信回路1020の他の機能は、本質的に能動型または受動型であり得る信号応答器の形で提供される。別の形態では、アクティベーション装置1022、指示装置1024および/または通信回路1020の他の機能は、接続部その他の手段によって、装置1010の残りの部分に係合し、かつそれから分離され得るユニットとして構成される。この形態では、このようなユニットを使用して、所望の順序で複数の装置1010のそれぞれに対して手動で係合/分離を行うことによって、複数の装置1010に質問を行うことができるはずである。別の変形形態では、このようなユニットは、複数の装置1010からの情報を保持するように構成することができるはずである。
図25に、本発明の別の実施形態の害虫駆除システム1110を示す。図では、同じ参照数字は同じ機能を指す。害虫駆除システム1110は、ワンド(wand)1102の形態の操作者制御式磁気アクティベーション装置(activation device)を含む。ワンド1102は、操作者用のグリップ1106および磁界源1108を備えた本体1104を含む。磁界源1108は、図25に記号化して示す磁界MFを提供する。磁界源1108は、いくつか例を挙げると、永久磁石または電磁石によって提供することができる。
システム1110は、害虫駆除装置1110も含む。さらに図26を参照すると、害虫駆除装置1110は、害虫監視構成1160内に配置された通信回路1120、接続部1040およびセンサ1150を含む。通信回路1120は、磁界MFに接近したときに、それに応答する装置1122ならびに情報を出力する指示器1136および1138を含む。通信回路1120は、回路サブアセンブリモジュール1144を形成するように組み立てられた他のコンポーネントも含む。モジュール1144は、様々なコンポーネントを電気的に相互接続するプリント配線ボードおよび/または通信回路1120を機械的に支持する他の部材を含み得る。害虫駆除装置1010に関して前に説明したように、モジュール1144およびそれに対応して通信回路1120は、接続部1040によってセンサ1150に電気的かつ機械的に接続される。
センサ1150は、害虫感知回路1152を載荷する基板1051を含む。害虫感知回路1152は、害虫駆除装置110の導体153について前に説明したように、設置時には所定のレベルよりも小さく、害虫の活動によって変化しやすい、図26にR1で示す電気抵抗を有する導電ループまたは回路網を含む。基板1051および/または害虫感知回路1152は、構成1160で監視する1種または複数種の害虫によって、通常、移動または消費される材料を含む。害虫感知回路1152は、通信回路1120に接続されると、それと協働して監視回路1169を形成する。害虫監視構成1160は、装置1010に関して前に説明したように、餌1032をさらに含む。図25の下側の部分に、切断図でその表面を示す。
害虫監視構成1160は、装置1010について前に説明したように、ハウジング1070内に設置し、かつそれから取り外すことができるような携帯型ユニットとして構成する。センサ1150は、接続部1040によって回路サブアセンブリモジュール1144に対して固定し、モジュール1144は、(断面で示す)キャップ1180に固定する。
装置1010について説明したように、モジュール1144および/またはキャップ1180に連結された(図示しない)1つまたは複数の側部材を含めて、部材1090は、構成1160に対するさらなる機械的な支持も提供する。キャップ1180は、害虫駆除装置1010のキャップ1080に類似して構成することができ、それによって、図に示すように、装置1136および1138を取り付けることができる。
装置1010について説明したように、モジュール1144および/またはキャップ1180に連結された(図示しない)1つまたは複数の側部材を含めて、部材1090は、構成1160に対するさらなる機械的な支持も提供する。キャップ1180は、害虫駆除装置1010のキャップ1080に類似して構成することができ、それによって、図に示すように、装置1136および1138を取り付けることができる。
図26に、概略的な形で通信回路1120を示す。「ノーマリオープン」型スイッチ1123の形でアクティベーション装置1122をさらに示す。スイッチ1123は、図25に示す磁界MFによって装置1122がアクティベーションされているときにのみ閉じる。指示器1136および1138がそれぞれ、通信回路1120によって選択的に点灯させることができるLED1124の形で設けられる。通信回路1120のコンポーネントには、図26に示すように電気的に相互接続された、ほぼ一定の電圧VSを供給するように構成された電気エネルギー源1125、抵抗R2〜R4ならびにコンパレータ1132および1134も含まれる。
次に、図25および26を全体的に参照して、害虫駆除装置1110の動作を説明する。害虫駆除装置1110は、様々な害虫駆除装置について図2および図20に示すように、1種または複数種の害虫を監視すべき領域に配置されるように構成される。さらに、図に示すように、害虫駆除装置1110は、地中への設置に適したものである。実際、通常の使用中は、少なくとも部分的にキャップ1180が見えるままの状態で、1つまたは複数の害虫駆除装置1110を少なくとも部分的に地中に設置する。
害虫駆除装置1110の設置後、操作者は、キャップ1180の近くにワンド1102をもっていき、装置1122をアクティベーションさせるのに十分な状態になるように磁界MFを装置1122に整列させ、それによってスイッチ1123を閉じることによって、通信回路1120(およびそれに対応して監視回路1169)の動作を刺激する。スイッチ1123が閉じると、エネルギー源1125が、電気ノード1126を介して通信回路1120の他のコンポーネントに電気的に接続される。スイッチ1123が、エネルギー源1125の電圧VSを回路ノード1126に接続している間、抵抗R2およびR3は、コンパレータ1132の反転(−)入力およびコンパレータ1134の非反転(+)入力に基準電圧VREFを供給する分圧器として構成される。抵抗R4と、R1で示す害虫感知装置1152の抵抗値も、抵抗R2およびR3で形成された分圧器に対して電気的に並列な分圧器を形成する。感知電圧VSENSEが、コンパレータ1132の非反転(+)入力およびコンパレータ1134の反転(−)入力に印加される。スイッチ1123が閉じている間、R2/R3およびR1/R4による分圧器はともに、VSと電気的な接地の間に接続される。
害虫感知回路1152の変化が生じる前に、VREFが公称上VSENSEよりも大きくなるように、4つの抵抗R1〜R4の相対抵抗値を選択する。コンパレータ1132および1134の反転(−)入力および非反転(+)入力のインピーダンスを無限大にすると(一般に、R1〜R4の値の妥当な近似値はそれぞれ、百万オームよりも小さい)、VREF=VS(R3/(R2+R3)およびVSENSE=VS(R1/R1+R4))になる。
VREFがVSENSEよりも大きいとき(VREF>VSENSE)、コンパレータ1134の出力はハイの状態になり、コンパレータ1132の出力はローの状態になる。この条件では、電圧VSが指示器1136のLED1124の両端に与えられ、それによって、VSが十分に大きい場合にはLED1124が発光する。これに対して、指示器1138のLED1124にはターンオン電圧が供給されず、このLED1124は点灯しない。
しかし、害虫の活動が増加すると、害虫感知回路1152の抵抗値R1が増加する。R1がR3よりも大きくなる場合、VSENSEはVREFよりも大きくなり(VSENSE>VREF)、コンパレータ1132および1134の出力状態が反転する。それに対応して、指示器1138が点灯し、指示器1136は点灯しなくなる。それによって、VREF>VSENSEの状態に比べて、害虫感知回路1152の状態が変化したことを示す情報が提供される。ワンド1102の移動または他の手段によって、装置1122から磁界MFが十分に離れるときは常にスイッチ1123が開き、それによって、ノード1126へのVSがなくなり、通信回路1120が非活動状態になり、それによって、指示器1136および1138がともに消灯する。
通信回路1120の動作を通じて、指示器1136および1138に2状態信号が供給され、それによって、害虫感知回路1152の電気的な連続性/抵抗値が、確立された閾値に対して相対的に変化したかどうかがそれぞれ視覚的に示される。この2状態信号を利用して、殺虫剤を付加し、害虫監視構成1160を殺虫剤送達構成に交換し、かつ/または別の処置を促すように害虫駆除装置1110を再構成する時期を決定することができる。このような他の処置には、殺虫剤とともに、あるいは殺虫剤を伴わずに追加の装置を設置することを含めることができる。別の実施形態では、通信回路1120が殺虫剤の消費を示す情報を提供するように、害虫駆除装置1110は最初から殺虫剤を含む餌を備える構成とする。
本発明の一実施形態では、害虫による変化が生じる前は、抵抗R2およびR4が公称330,000オームであり、抵抗R3が公称約25,000オームであり、害虫感知回路1152の抵抗値が公称約15,000オーム(R1)である。この実施形態では、エネルギー源1025が、3ボルトのほぼ一定出力を供給し、かつ1つまたは複数の電気化学セル(たとえば「電池」)の形であり、コンパレータ1132および1134がそれぞれLM339の種類のものであり、装置1122が磁気的にアクティベーションされるリードスイッチの形であり、指示器1136が緑色のLEDの形であり、指示器1138が赤色のLEDの形である。他の実施形態では、電気エネルギー源1125、抵抗R1〜R4で示す抵抗値、装置1122、指示器1136と1138、および/またはコンパレータ1132と1134は異なるものとすることができる。一代替実施形態では、VREFは、分圧器以外の電圧基準によって供給される。たとえば、ツェナーダイオード、バンドギャップ型基準および/または電圧レギュレータ素子を代わりに使用することができるはずであり、これらはほんの一例である。
磁気リードスイッチで装置1122を形成するのに加えて、1つまたは複数のホール効果センサ、電気機械式にアクティベーションされるコンポーネント、外部磁界に応答する誘導性コイル、または当業者が想起するであろう異なる装置のタイプなど、他の磁気的にアクティベーションされる装置を使用することができるはずである。あるいは、またはそれに加えて、3つ以上の動作状態を有する装置によってアクティベーションが行われる。
他の実施形態では、単一の指示器しか使用しない。この実施形態の一形態では、害虫の活動が検出されたときか、あるいは検出されなかったときにのみLEDが点灯するが、これら両方の状態に対しては点灯しない。この実施形態の別の形態では、2つの別個のLED素子の代わりに、多色LEDタイプの指示器を使用する。他の実施形態では、LED以外に1つまたは複数の指示器を使用することができる。このような指示器は、視覚的、可聴式、それらの組合せまたは当業者が想起するであろう異なるタイプのものとすることができる。一例では、この指示器は、白熱電球または電気機械式の指示器の形態である。別の例では、この指示器は、監視回路1169によって提供される情報を、磁界MFの刺激に応答して出力するRF信号送信機の形態である。磁界MFは、時間的に変化する電磁放
出からなる1つ(または複数)の磁界成分とすることができることを理解されたい。
出からなる1つ(または複数)の磁界成分とすることができることを理解されたい。
別の形態では、装置1122、1つ(または複数)の指示器1136と1138、および/または通信回路1120の他の機能は、本質的に能動型または受動型であり得る信号応答器の形で提供される。別の形態では、装置1122、エネルギー源1125、1つ(または複数)の指示器1136と1138、および/または通信回路1120の他の機能は、接続部その他の手段によって、装置1110の残りの部分に係合し、かつそれから分離され得るユニットとして構成される。この形態では、このようなユニットを使用して、所望の順序で複数の装置1010のそれぞれに対して手動で係合/分離を行うことによって、複数の装置1110に質問を行うことができるはずである。別の変形形態では、このようなユニットは、複数の装置1110からの情報を保持するように構成することができるはずである。
別の実施形態は、害虫感知回路1152の状態を示す所望の出力状態を提供するコンパレータ以外の回路および/または1つ(または複数)のコンポーネントを含む。たとえば、害虫感知回路1152の状態の変化に応答する1つまたは複数のトランジスタ、論理素子などを使用することができるはずである。あるいは、またはそれに加えて、エネルギー源1125は、電池以外の形態とすることができ、装置1110の外部に配置することができ、かつ/または、操作者が装置1110に選択的に印加することができる。一代替形態では、磁界刺激MFは可変タイプのものであり、通信回路1120は、エネルギー源1125に加えて、あるいはその代わりに、磁界刺激MFから動作電力を得るように構成される。
あるいは、またはそれに加えて、監視回路1169は、装置についての異なる情報を通信するように適合され得る。たとえば、エネルギー源1125が動作するかどうかを調べる追加の副回路を含めることができる。別の例では、ワンド1102およびそれに対応する指示器出力によって手動で害虫感知回路の質問を行うことを上記害虫駆除装置の無線通信回路に追加して、操作者のトリガにより検査を行うことができる。別の例では、装置1110で実施した手動の質問技法を利用して、害虫による様々な非ゼロレベルの消費または移動を出力する。したがって、刺激に応答して、消費または移動の量を定量化する情報を得ることができる。このような実施形態では、装置310、410、510、610、710および/または810のセンサ構成を通信回路1120に適切に適合させて使用し、それによって、磁気的にアクティベーションされる装置または他の操作者用の入力装置によってアクティベーションさせることができる。このような一形態では、複数のLEDまたは別の視覚的な表示により、様々な非ゼロレベルの消費量が出力される。別の形態では、2状態を示す単一のLEDを使用するが、閾値レベルは、所与のゼロでない度合いの消費または移動に相当するように設定する。この閾値は、工場設定とすることもできるし、かつ/または、操作者が設定することもできる。
図27に、本発明の別の実施形態の害虫駆除システム1200を示す。図では、同じ参照数字は同じ機能を指す。システム1200は、害虫駆除装置1210も含む。さらに図28を参照すると、害虫駆除装置1210は、害虫監視構成1260内に配置された回路1220、接続部1040およびセンサ1250を含む。回路1220は、指示器構成1230を含む。構成1230は、前に述べたようにLED1124の形態の指示器1136および1138を含む。回路1220は、回路サブアセンブリモジュール1244を形成するように組み立てられた1つまたは複数の他のコンポーネントも含む。モジュール1244は、様々な電気相互接続部を提供するプリント配線ボードおよび/または回路1220を機械的に支持する他の部材を含み得る。前に述べたように、モジュール1244およびそれに対応して回路1220は、接続部1040によってセンサ1250に電気的かつ機械的に接続される。
センサ1250は、害虫感知回路1252を載荷する基板1051を含む。害虫感知回路1252は、図28にR1で示す電気抵抗を有する導電ループまたは回路網を含む。この電気抵抗値R1は、害虫駆除装置110の導体153について前に説明したように、害虫駆除装置1210の設置時には所定のレベルよりも小さく、害虫の活動によって変化しやすい。基板1051および/または害虫感知回路1252は、構成1260で監視する1種または複数種の害虫によって、通常、移動または消費される材料を含む。害虫感知回路1252は、回路1220と接続されると、それと協働して監視回路1269を形成する。害虫監視構成1260は、装置1010に関して前に説明したように、餌1032をさらに含む。図27の下側の部分に、切断図でその表面を示す。
害虫監視構成1260は、装置1010について前に説明したように、ハウジング1070内に設置し、かつそれから取り外すことができるような携帯型ユニットとして構成する。センサ1250は、接続部1040によって回路サブアセンブリモジュール1244に対して固定し、モジュール1244は、(断面で示す)キャップ1280に固定する。装置1010について前に説明したように、モジュール1244および/またはキャップ1280に連結された(図示しない)1つまたは複数の側部材を含めて、部材1090は、構成1260に対するさらなる機械的な支持も提供する。キャップ1280は、害虫駆除装置1010のキャップ1080に類似して構成することができ、それによって、指示器1136および1138を取り付けて、装置1210の外部の操作者に見えるようにすることができる。
図28に、概略的な形で回路1220を示す。構成1230の指示器1136および1138はそれぞれ、回路1220によって選択的に点灯させることができる。回路1220には、ほぼ一定の電圧を供給するように構成された電気エネルギー源1225ならびにエネルギー源1225および指示器構成1230に動作可能に接続されたコントローラ回路1240も含まれる。
コントローラ回路1240は、接続部1040で害虫感知回路1252に選択的に接続される。コントローラ回路1240は、デジタルタイプ、アナログタイプ、当業者が想起するであろう異なるタイプ、あるいはそれらの組合せの1つまたは複数のコンポーネントからなり得る。一形態では、コントローラ回路1240は、ソリッドステート集積回路素子に基づくものである。たとえば、図28に、単一集積回路素子IC1としてコントローラ回路1240を記号化して示す。図に示す実施形態は、Microchip Technology社のモデル番号PIC12C5XXマイクロコントローラに相当するものである。この形のマイクロコントローラは、プログラム可能なタイプのものであり、RISC(縮小命令セットコンピュータ)プロセッサを有し、1つまたは複数の形態のメモリを含む。エネルギー源1225は、図に示す実施形態のIC1に電力を供給するために接点VDDとVSSの間に接続された、DC(直流)約3ボルトを供給する1つまたは複数の電気化学セル(たとえば、一般的な電池)からなり得る。接続部1040は、IC1の接点GP4/OSC2と接点GP3/MCLR/VPPの間に接続され、構成1230は、接点GP1、GP0およびGP2/TOCK1に接続される。PIC12C5XXファミリーのマイクロコントローラのデータシートをここに参照により組み込む。あるいは、またはそれに加えて、他の実施形態では、当業者が想起するであろうプログラム可能またはプログラム固定式の種類の異なるタイプのコントローラ回路を使用することができる。
次に、図27および28を全体的に参照して、害虫駆除装置1210の動作を説明する。害虫駆除装置1210は、様々な害虫駆除装置について図2および図20に示すように、1種または複数種の害虫を監視すべき領域に配置されるように構成される。さらに、図に示すように、害虫駆除装置1210は、地中への設置に適したものである。実際、通常
の使用中は、キャップ1280が少なくとも部分的に見えるままの状態で、1つまたは複数の害虫駆除装置1210を少なくとも部分的に地中に設置することができる。
の使用中は、キャップ1280が少なくとも部分的に見えるままの状態で、1つまたは複数の害虫駆除装置1210を少なくとも部分的に地中に設置することができる。
電力を節約するために、回路1220は、接続部1040を介して害虫感知回路1252に電気的に接続されるまで活動状態にならないように構成することができる。たとえば、このような接続により、(図28に示す経路1226などの)導電経路が閉じてアクティベーションのトリガをかけることができる。一形態では、接続部1040および/または害虫感知回路1252に設けられた補助の導体に害虫感知回路1252を挿入して電気経路を閉じることによって、スイッチにトリガをかけることができるはずである。あるいは、またはそれに加えて、回路1220は、キャップ1280に取り付けられた手動スイッチなどの操作者による制御、磁気または電磁気アクティベーション信号、装置310、410、510、610、710、810、1010または1110で用いるアクティベーション/刺激技術によってアクティベーションさせることもできるはずであるし、かつ/または、特定のアクティベーション要件なしに動作するように構成することもできるはずである。
アクティベーションさせ設置した後で、害虫駆除装置1210のコントローラ回路1240は、連続的かつ/または周期的に、害虫感知回路1252の状態を自動的に監視するように動作する。さらに、コントローラ回路1240は、第1状態から第2状態への害虫感知回路1252の状態の変化を検出するように動作可能である。一例では、この第1状態は、抵抗値R1が確立された閾値よりも小さい状態の電気的な閉路に相当し、第2状態は、抵抗値R1が確立された閾値よりも大きい状態の電気的な開路に相当し得る。他の例では、コントローラ回路1240によって、1つまたは複数の異なるパラメータ、たとえば、容量、インダクタンスおよび/または磁気標識を監視/検出することができるはずであり(これらはほんの一例である)、また、抵抗値および/または開路/閉路状態に加えて、またはその代わりに、このような1つまたは複数の異なるパラメータに関連して規定される害虫感知回路1252の状態の対応する変化を監視/検出することができるはずである。
害虫感知回路1252の第1状態では、コントローラ回路1240は、接点GP0を介して構成1230の指示器1136(LED1124の一方)に信号を出力して発光させ、構成1230の指示器1138(LED1124の他方)は点灯させないままである。この状態は、構成1230の第1発光形態とみなすことができる。コントローラ回路1240は、第1状態から第2状態への害虫感知回路1252の状態変化の検出に応答し、その出力を調整することによって、接点GP2/TOCK1による出力を介して、指示器1136の点灯を中止し、指示器1138の点灯を開始する。この状態は、構成1230の第2発光形態とみなすことができる。
一形態では、指示器1136は緑色のLED1124であり、第1発光構成形態では、コントローラ回路1240からの出力でパルス化されて点滅パターンで間欠的に発光し、かつ/または、発光強度が変化する。また、指示器1138は赤色のLED1124であり、第2発光形態では、コントローラ回路1240からの出力でパルス化されて点滅パターンで間欠的に発光し、かつ/または、発光強度が変化する。このような点滅パターンは、発光素子を「オン状態」と「オフ状態」の間で交互に切り替えることを含み得る。周期的、かつ/または、所定の変化パターンに従って放出される光の変化によって、害虫センサの所与の状態を表すことができる。このような変化は、放出される光の強度の変化、反射、方向、屈折、フィルタリングおよび/または遮断に基づいて行うことができる。非限定的な一形態では、ゼロでない2つの強度レベル間で光の強度が変化する。他の形態では、所与の状態に対してこの照明をほぼ一定し、発光指示器の色の種類と数を変え、かつ/または、発光形態を異なるものにすることができる。
エネルギー源1225からの電力がもはや利用可能でなくなると、指示器1136も指示器1138も点灯しなくなり、それによって電力障害を示すことを理解されたい。害虫感知回路1252の監視、状態変化の検出、コントローラ回路1240から構成1230への1つまたは複数の出力信号の調整その他の動作は、コントローラ回路1240によって実行される動作論理に従って実施することができる。この動作論理は、プログラミング命令、専用回路、それらの組合せ、および/または当業者が想起するであろう異なる形態とすることができる。非限定的な例として、前に述べたPIC12C5XXコントローラの実施形態では、この動作論理の少なくとも一部が、常駐の非揮発性メモリ中に記憶されたプログラミング命令の形態である。
回路1220の動作を通じて、指示器1136および1138に2状態信号が供給され、各指示器によって、害虫感知回路1252の電気的な連続性/抵抗値が、確立された閾値に対して相対的に変化したかどうかが視覚的に示される。この2状態信号を利用して、殺虫剤を付加し、害虫監視構成1260を殺虫剤送達構成に交換し、かつ/または別の処置を促すように害虫駆除装置1210を再構成する時期を決定することができる。このような他の処置には、殺虫剤とともに、あるいは殺虫剤を伴わずに追加の装置を設置することを含めることができる。別の実施形態では、回路1220が殺虫剤の消費を示す情報を提供するように、害虫駆除装置1210は最初から殺虫剤を含む餌を備える構成とする。
他の実施形態では、構成1230で単一の指示器しか使用しない。この実施形態の一形態では、害虫の活動が検出されたとき、あるいは検出されなかったときにのみLEDが点灯するが、これら両方の状態に対しては点灯しない。この実施形態の別の形態では、2つの別個のLED素子の代わりに、多色LEDタイプの指示器を使用する。他の実施形態では、LED以外に1つまたは複数の指示器を使用することができる。このような指示器は、視覚的、可聴式、それらの組合せまたは当業者が想起するであろう異なるタイプのものとすることができる。一例では、この指示器は、白熱電球または電気機械式の指示器の形態である。別の例では、この指示器は、監視回路1269によって提供される情報を、刺激に応答して出力するRF信号送信機の形態である。
別の形態では、1220、エネルギー源1225、1つ(または複数)の指示器1136と1138、および/または回路1220の他の機能は、接続部その他の手段によって、装置1210の残りの部分に係合し、かつそれから分離され得るユニットとして構成される。この形態では、このようなユニットを使用して、所望の順序で複数の装置1210のそれぞれに対して手動で係合/分離を行うことによって、複数の装置1210に質問を行うことができるはずである。別の変形形態では、このようなユニットは、複数の装置1210からの情報を保持するように構成することができるはずである。
別の実施形態では、エネルギー源1225は、電池以外の形態とすることができ、装置1210の外部に配置することができ、かつ/または、操作者が装置1210に選択的に印加することができる。あるいは、またはそれに加えて、監視回路1269は、装置についての異なる情報を通信するように適合させることができる。別の例では、コントローラ回路1240および構成1230を、上記害虫駆除装置の無線通信回路に追加することができる。コントローラ回路1240は、害虫による様々な非ゼロレベルの餌1032の消費または移動に対応する指示、および/またはそれに対応する害虫感知回路1252の変化を出力するように適合される。したがって、変化、消費および/または移動の量を定量化する情報を得ることができる。このような実施形態では、装置310、410、510、610、710および/または810のセンサ構成を回路1220に適切に適合させて使用することができる。このような一形態では、複数のLEDまたは別の視覚的な表示が、様々な非ゼロレベルの消費量を出力する。別の形態では、2状態を示す単一のLEDを
使用するが、閾値レベルは、所与のゼロでない度合いの変化、消費および/または移動に対応するように設定する。この閾値は、工場設定とすることもできるし、かつ/または、操作者が設定することもできる。
使用するが、閾値レベルは、所与のゼロでない度合いの変化、消費および/または移動に対応するように設定する。この閾値は、工場設定とすることもできるし、かつ/または、操作者が設定することもできる。
一般に、1つまたは複数の発光指示器を使用する実施形態では、所与の状態を表すために、1つまたは複数のパターンに従って放出される光を点滅させ、色を変え、点滅パターンを変え、かつ/または強度を変えることができることを理解されたい。同様に、様々な出力パターンは、可聴式および機械式指示器のタイプなど他のタイプの出力装置で利用することができるが、これらはほんの一例である。
図29に、害虫駆除装置1310および1410を含む別のタイプの害虫駆除システム1300を示す。図では、同じ参照数字は、上記で説明したものと同じ機能を指す。システム1300は、表示制御パネル1462の形態のシステムデータ収集装置1460を収容する建築物1412を含む。システム1300は、通信経路1414で装置1460に接続された中央データ収集サイト626(図20参照)も含む。通信経路1414は、インターネットなどのコンピュータネットワークによる配線式接続、専用電話相互接続、無線リンク、それらの組合せ、あるいは当業者が想起するであろう他の種類のものとすることができる。
システム1300では、害虫駆除装置1310を地中に示し、害虫駆除装置1410を建築物1412内に示す。害虫駆除装置1310および1410は、バス1420で装置1460に接続されて、それと選択的に通信する。中央データ収集サイト626は、離れた位置にある複数の装置1460および/またはユニット390に接続することができる(図11、14、17および20参照)。あるいは、またはそれに加えて、中央データ収集サイト626は、1つまたは複数の害虫駆除装置110、310、410、510、610、710、810、1010、1110、1210、1310および/または1410とともに、このようなユニット390または装置1460によって、様々な建築物または区域を監視するように構成することができる。
さらに図30および31を参照すると、システム1300の代表的な害虫駆除装置1310がさらに示されている。図では、同じ参照数字は同じ機能を指す。図31に、概略的な形で装置1460も示す。害虫駆除装置1310は、図30に示す害虫監視構成1360内に配置した通信回路1320、接続部1040およびセンサ1350を含む。通信回路1320は、バス1420に接続される。バス1420は、導電体1422aの形の(BCPとも表す)2方向(双方向)通信経路1422、それに対応する導電体1424aの形の(GNDとも表す)電気接地ライン1424および導電体1426aの形の(PWRとも表す)感知回路電源ライン1426を含む。図30に概略的に示すように、導体1422および1424は、電気ノイズ除去の助けとなる「撚線対」構成とすることができるが、他の実施形態では、異なる配線構成を用いることができるはずである。
通信回路1320は、バス1420の経路1422に接続されたアドレス可能な通信装置1340を含み、また、装置1340と害虫感知回路1352の間に接続された感知インターフェース1330も含む。通信回路1320のコンポーネントは、回路サブアセンブリモジュール1344を形成するように組み立てられる。モジュール1344は、様々なコンポーネントを電気的に相互接続するためのプリント配線ボードおよび/または通信回路1320を機械的に支持する他の部材を含み得る。モジュール1344およびそれに対応して通信回路1320は、接続部1040によって、センサ1350に電気的かつ機械的に接続される。接続部1040は、害虫駆除装置110の接続部材140について説明した導電エラストマ材料および/または当業者が想起するであろう異なる材料または構成を含み得る。
センサ1350は、害虫感知回路1352を載荷する基板1051を含む。害虫感知回路1352は、害虫駆除装置110の導体153について前に説明したように、設置時には所定のレベルよりも小さく、害虫の活動によって変化しやすい電気抵抗を有する導電ループまたは回路網を含む。基板1051および/または害虫感知回路1352は、構成1360で監視すべき1種または複数種の害虫によって、通常、移動または消費される材料を含む。害虫感知回路1352は、通信回路1320と接続されると、それと協働して監視回路1369を形成する。
害虫監視構成1360は、餌1032をさらに含む。図30の下側の部分に、切断図でその表面を示す。餌1032は、餌部材132または前に説明したその変形形態と同じ構成とすることができる。一構成では、餌1032は、害虫駆除装置110のセンサ150に関する餌部材132について図3および6に示すように、センサ1350の両側に配置した少なくとも2つの部材の形態をとる。
害虫監視構成1360は、ハウジング1070に設置し、かつそれから取り外すことができるような携帯型ユニットとして構成する。ハウジング1070は、害虫駆除装置110に関して説明したハウジング170のように地中に設置するのに適した材料からなり、それに適した形状とすることができる。センサ1350は、接続部1040によって回路サブアセンブリモジュール1344に対して固定し、モジュール1344は、(断面で示す)キャップ1380に固定する。モジュール1344および/またはキャップ1380に連結された(図示しない)1つまたは複数の側部材を含めて、担持部材1090は、構成1360に対してさらなる機械的な支持を提供する。キャップ1380は、害虫駆除装置110のキャップ180に類似して構成することができるが、接続部1382によって装置1310に導体1422a、1424aおよび1426aを接続するように対処する改変を伴う。担持部材1090は、害虫駆除装置110の担持部材190に類似して構成することができ、モジュール1344および/またはキャップ1380に対して恒久的に固定することもできるし、またはそれらに選択的に連結することもできる。
特に図31を参照すると、データ収集装置1460および害虫駆除装置1310のさらなる細部が示されているが、見易いように、装置1310を1つだけ示すことを理解されたい。Dallas Semiconductor社からモデル番号DS2405で提供されるアドレス可能な半導体スイッチ素子の形で害虫駆除装置1310の装置1340を示す。このモデルでは、(図30および31のBCP経路接続部として示す)DATAピンが、バス1420のデータ経路1422に接続され、それによって、経路1422とのシングルビットの双方向通信ポート1322が形成される。同様に、GNDピンは、バス1420の接地ライン1424に接続される。(この例では、直流約5ボルトを供給する)バス1420の電源ライン1426は、感知インターフェース1330に接続されて、それに電力を供給する。図に示す構成では、装置1340は、その内部回路に電力を供給するのに十分な電荷を蓄積する(図示しない)内部コンデンサを含む。このコンデンサは、その蓄積したエネルギーを経路1422と接地ライン1424の間の電圧から寄生的に導き出す。この寄生容量性電源のために、装置1340は、電源ライン1426から電力を引き込む必要がない。ただし、他の実施形態では、装置1340は、さらに、またはその代わりに、電源ライン1426への接続部および/または異なる電源から電力を受け取ることができる。この異なる電源は、たとえば、1つまたは複数の電気化学セルであるが、これはほんの一例である。同様に、2つ以上のエネルギー源および/または異なるエネルギー源によって、インターフェース1330に電力を供給することができる。この異なるエネルギー源は、たとえば、1つまたは複数の電気化学セルまたはコンデンサであるが、これはほんの一例である。
アドレス可能な監視装置1340はそれぞれ、2進数の形で工場で記録された恒久的な識別子1342を含む。装置1340は群単位で取得することができ、それらの識別子1342はそれぞれ、その群内の他の装置のものと異なる。装置1340は、その識別子を、バス1420を介して受信した情報と比較して、その識別子がアドレスされているかどうかを判定するように構成される。個々に異なる識別子1342を有する一群のアドレス可能な通信装置1340の場合、各装置1340は、経路1422を介して固有にアドレスすることができる。所与の装置1340は、アドレスされると、質問を受けて、別のI/P(入力)ノードの状態、より具体的には、そのI/Pノードがハイまたはローの2進数論理レベルのいずれであるかを経路1422を介して出力することができる。DS2405の形態の装置1340では、このI/Pノードは、「PIO」ピンと表された接続ピンであり、これは、「オープンコレクタ」タイプのノードとして様々な動作モードで出力を供給することもできる。モデルDS2405の形態の装置1340に関するさらなる情報は、2002年7月16日の時点で、www.maxim−ic.comのURL(ユニバーサルリソースロケータ)から得られる「Dallas Semiconductor DS2405アドレス可能スイッチ」のデータシートで提供される。
インターフェース1330はPNPトランジスタ1332を含み、そのコレクタは装置1340のI/Pノードに接続され、エミッタは電源ライン1426に接続され、ベースは接続部1040の1つの接点と抵抗1334の間に接続される。DS2407の形態の装置1340とともに使用するのに適した一実施形態では、トランジスタ1332は、モデル2N3906タイプのものであり、抵抗1334は、220,000オームの種類のものである。接続部1040に係合すると、害虫感知回路1352は、トランジスタ1332のベースと電気的な接地の間に配置される。図31では、抵抗1353で害虫感知回路1352を示す。
図29も参照すると、害虫駆除装置1410は、建築物1412内での使用に適したタイプのものであり、装置1310について説明した方式でバス1420に接続されるように適合される。したがって、害虫駆除装置1410は、図20に示す上記「建築物内」型装置410、510および610を、監視回路1369を含むように改変することによって形成することができるはずである。図29では、1つの害虫駆除装置1410およびいくつかの害虫駆除装置1310しか示さないが、他の実施形態では、1つまたは複数の害虫駆除装置110、310、410、510、610、710、810、1010、1110および/または1210とともに使用する場合でも、それらを含めない場合でも、各タイプの数を増減して使用することができるはずであることを理解されたい。各害虫駆除装置1310、1410の通信ポート1322は、通信経路1422の導体1422aによって形成される共通の電気ノード1423に接続されることを理解されたい。同様に、共通の電気的な接地および電力接続部は、導体1424aおよび1426aを介してそれぞれ共有される。
データ収集装置1460は、害虫駆除装置1310および1410に個々に質問を行い、それに応答してバス1420を介して受信したデータを収集し記憶する。データ収集装置1460は、様々な操作者用の出力装置1464および操作者用の入力装置1480によって操作者用のインターフェースも提供する。出力装置1464は、指定した英数字列を表示することができるLCD(液晶ディスプレイ)1466、電力状態を示す発光素子1468a、走査状態を示す発光素子1468b、障害状態を示す発光素子1468cおよび活動状態を示す発光素子1468dを含む。装置1468a、1468b、1468cおよび/または1468dは、LEDタイプのもの、白熱電球タイプのもの、異なるタイプのもの、あるいはそれらのタイプの組合せとすることができるはずであるが、これらはほんの一例である。
出力装置1464は、装置1460の制御回路1470に接続される。制御回路1470は、コントローラ1472、発振器1474およびメモリ1476を含む。コントローラ1472は、プログラミング命令の形態、専用論理回路の形態、それらの組合せまたは当業者が想起するであろう異なる形態の動作論理とともに提供される。制御回路1470の様々な動作は、バス1420を介した通信、データの処理、記憶および読出し、ならびに入出力操作の指令を含めて、この動作論理に従ってコントローラ1472によって実施されるが、これらの動作に限定されるものではない。一実施形態では、コントローラ1472は、モデル番号PIC16F877でMicrochip Technologies社から提供される形態のものであり、その動作論理の少なくとも一部はプログラミング命令として提供される。コントローラ1472は、バス1420の経路1422を介して通信するためのシングルビット双方向I/Oポート構成を含む。発振器1474は、コントローラ1472の動作クロック信号を生成するために設けられた標準タイプのものである。不揮発性のEEPROM(電気的に消去書込み可能な読出し専用メモリ)としてメモリ1476を示すが、フラッシュメモリ、電池でバックアップされたRAM(ランダムアクセスメモリ)、磁気バブルメモリ、光ディスクまたは光磁気ディスク、DRAM(ダイナミックRAM)および/またはSRAM(スタティックRAM)など、1つまたは複数の他のタイプのものとすることができ、これらはほんの一例である。不揮発性タイプを用いる場合、必要に応じて、経路1414を介したサイト626および/または(図示しない)ディスクドライブなどの入力装置など外部装置からロードし直すことができるはずである。あるいは、またはそれに加えて、装置1460に(図示しない)パーソナルコンピュータを接続し、それによって、インターネットなどのコンピュータネットワークを介して経路1414を確立することができるはずである。このパーソナルコンピュータは、さらに、または代わりに、装置1460に対してデータおよび/またはプログラムの通信を行うための手段を提供することができるはずである。
装置1460は、コントローラ1472に接続されたプッシュボタンスイッチ1482、1484、1486および1488の形態の操作者用の入力装置1480をさらに含み、それらによって、回路1470を制御するためのアップ、ダウン、インストールおよびリセットという4つの固有の入力がそれぞれ提供される。装置1460のコンポーネントおよびバス1420に電力を供給する電源1490も含まれる。PIC16F877の形態のコントローラ1472で実施する実施形態では、適当な方式で、ピンA0〜A3を装置1468a〜1468dに接続し、ピンD0〜D7、E0およびE1をLCD1466に接続し、ピンB0〜B3を入力装置1480に接続する。
図29〜31を全体的に参照すると、システム1300の様々な動作モードがさらに示されている。データ収集装置1460および害虫駆除装置1310、1410は、建築物1412およびそれを取り囲む領域などの監視すべき領域内に配置するように構成される。害虫駆除装置1310、1410を設置し、バス1420でデータ収集装置1460に接続する。図に示す実施形態では、害虫駆除装置1310は、地中への設置に適したものである。実際、通常の使用中は、1つまたは複数の害虫駆除装置1310を少なくとも部分的に地中に設置し、害虫駆除装置1410を建築物1412内に設置する。図29に示すように、データ収集装置1460も建築物1412内に設置する。
それぞれ異なる識別子1342を有する一群の装置1310および1410の場合、この群の装置はそれぞれ、バスマスタに対するバス1420上のスレーブとして固有にアドレスすることができる。システム1300では、このバスマスタ動作は、コントローラ1472の動作論理に従って実施される。コントローラ1472によりバス1420を介して装置1340を固有にアドレスすると、コントローラ1472がI/Pノードの状態の質問を送ることができるプロトコルが確立される。固有にアドレスされた装置1340は、この質問に応答して、前に述べたように経路1422を介して、対応するI/Pノード
の論理状態を送信する。
の論理状態を送信する。
I/Pノードの論理状態は、害虫感知回路1352の状態で決まる。害虫感知回路1352が、完全な状態であり、接続部1040によってトランジスタ1332のベースと接地の間に電気的に接続されている場合、抵抗1334および1353で形成された分圧器により、トランジスタ1332をオンにする電圧がベースとエミッタの間に与えられる。他の実施形態に関して前に述べたように、害虫感知回路1352が電気的に開いた状態になるか、あるいは、電気抵抗値が十分に大きくなるように、1種または複数種の害虫により材料が移動した場合、ベースとエミッタの間の電圧は減少して、トランジスタ1332がオフになる。トランジスタ1332のオン/オフ状態が変わると、装置1340のI/Pノードに示される論理レベルも変わる。
コントローラ1472の動作論理により、設置された害虫駆除装置1310、1410の群の識別子1342に対応するデータが認識され記憶される。このような識別子1342はそれぞれ、この群内の他の識別子に対して固有なものである。操作者は、プッシュボタン1486によって、個々の害虫駆除装置が設置されたことを示す。設置された害虫駆除装置1310、1410のリストを生成し、ディスプレイ1466で表示することができる。操作者は、プッシュボタン1482および1484で、このリストをそれぞれ上方および下方にスクロールすることができる。制御回路1470は、プッシュボタン1488でリセットすることができる。
さらに、コントローラ1472の動作論理により、電力が供給されていることを示す装置1468aおよびシステム1300が活動状態であることを示す装置1468dが適切に点灯する。さらに、コントローラ1472は、そのプログラムに従って、接続された害虫駆除装置1310、1410を周期的に1つずつ走査して、対応する害虫感知回路1352の状態、について各装置に質問を行う。この状態は、それぞれの装置1340のI/Pノード上の論理レベルに反映されているものである。コントローラ1472によって装置1468bが点灯して、この動作が行われていることが示される。害虫駆除装置1310、1410が個々にアドレスされると、対応する装置1340によって、得られた状態が経路1422を介して制御回路1470に送信され、記憶される。ディスプレイ1466が示す設置された害虫駆除装置1310、1410のリストが、(1)装置が「活動」状態であるかどうかと、(2)1つまたは複数の装置1310、1410のI/Pノードの状態の変化によって害虫の存在が示されているかどうかとを反映するように更新される。所与の装置1310または1410の「活動」状態は、害虫駆除装置1210に関して説明したように、接続部1040への基板1051の機械的な連結に応答して変化するスイッチその他の回路機能によって示すことができる。
害虫の存在を示す状態の変化が生じる場合には、コントローラ1472は、「障害」の状態を示す装置1468cを点灯させるようにプログラムされており、障害が示される。あるいは、またはそれ加えて、対応する可聴警報を生成することができるはずである(図示せず)。ディスプレイ1466が示す情報からは明らかにならない場合、この障害指示により、操作者がリストをスクロールして、障害のある害虫駆除装置を見つけるように促すことができる。
1種または複数種の害虫の存在が決まると、一動作モードでは、経路1414を介して中央データサイト626に障害が報告され、かつ/または、害虫駆除業者がシステム1300を検査し、適切と思われるさらなる処置が取られる。あるいは、またはそれに加えて、建築物1412にいる操作者は、害虫駆除業者に障害を報告することができる。他のモードでは、建築物1412の居住者が、遠隔地に所在する害虫駆除業者に通知することなく、害虫の検出に対処することができる。操作者および/または通知を受けた害虫駆除業
者が取り得る処置には、害虫監視構成1360を殺虫剤送達構成に交換することによって、殺虫剤を付加するように1つまたは複数の害虫駆除装置1310、1410を再構成することが含まれる。他の処置は、殺虫剤とともに、あるいは殺虫剤を伴わずに追加の装置を設置することを含み得る。別の実施形態では、通信回路1320が殺虫剤の消費を示す情報を提供するように、害虫駆除装置1310、1410は最初から殺虫剤を含む餌を備える構成とする。
者が取り得る処置には、害虫監視構成1360を殺虫剤送達構成に交換することによって、殺虫剤を付加するように1つまたは複数の害虫駆除装置1310、1410を再構成することが含まれる。他の処置は、殺虫剤とともに、あるいは殺虫剤を伴わずに追加の装置を設置することを含み得る。別の実施形態では、通信回路1320が殺虫剤の消費を示す情報を提供するように、害虫駆除装置1310、1410は最初から殺虫剤を含む餌を備える構成とする。
異なる実施形態では、トランジスタを含まない害虫感知回路1352にI/Pノードを接続する。他の実施形態では、異なる抵抗値、および/またはトランジスタ1332に加えて、またはその代わりに、異なるタイプの切替装置を使用する。このような代替構成は、PNPトランジスタ1332の代わりに、NPNバイポーラ接合トランジスタ、FET(電界効果トランジスタ)、電気機械式リレー、またはSSR(ソリッドステートリレー)を使用し、それに対応する回路1320の調整を含み得るが、これらは可能性のほんの一例である。
他の実施形態では、アドレス可能な通信装置1340は、モデルDS2405以外のタイプのものであり、かつ/または、直接またはインターフェース1330を介して害虫感知回路1352に接続するのに適した1つまたは複数のコンポーネントからなる特注回路によって提供される。このような一代替形態では、装置1310、1410それぞれの識別子1342は、電子的かつ/または機械的に割り当てるか、あるいは変更することができる。別の代替形態では、監視回路1369および/または装置1340は、害虫による非ゼロレベルの消費または移動の変化など、装置についての異なる情報を通信して、生じた消費または移動の量を定量化するように適合される。このような実施形態では、装置310、410、510、610、710および/または810のセンサ構成を通信回路1320に適切に適合させて用いることができる。さらに、複数の装置1340を、適切な支援回路を備えた同じ害虫駆除装置内で使用して、別個の異なるレベルの消費または移動を反映させることができる。
コントローラ1472は、PIC16F877以外のタイプによって形成することができ、かつ/または、制御回路1470に関して説明した動作を実施するように適切に構成された1つまたは複数のコンポーネントからなり得る。それに対応して、発振器1474および/またはメモリ1476などの支援コンポーネントを異なるものとすることができ、または他のコンポーネントとともに使用するか、あるいは支援コンポーネントをもたなくてもよい。他の実施形態では、プラズマディスプレイ、電気機械式指示器、またはCRT(陰極線管)などの異なるタイプの出力装置1464を使用することができるが、これらはほんの一例である。他の実施形態では、トグルスイッチ、英数字キーボードまたはキーパッド、ディスプレイと連繋して使用するノイズまたはライトピンなどのポインティングデバイス、または音声認識サブシステムなどの異なるタイプの入力装置1480を使用することができるが、これらはほんの一例である。
他の実施形態では、バス1420は、光ファイバその他の送信手段を使用する光学的なタイプのものすることができる。あるいは、バス1420は、すべての実施形態において、双方向ではなく所与の経路に沿った1方向通信で構成することができる。このような例では、少なくとも1つの経路はマスタ/スレーブであり、別の経路はスレーブ/マスタである複数の通信経路を使用することができる。別の実施形態は、シリアル通信に加えて、あるいはその代わりに、パラレル通信フォーマット用に構成することもできる。同様に、任意の互換バスプロトコルを使用することができる。
別の形態では、通信回路1320および/または制御回路1470は、本質的に能動型または受動型であり得る無線信号応答器の形で提供される。別の変形形態では、通信回路
1320および/または制御回路1470は、前に述べた実施形態の技術を用いて、無線および/または手動による質問を行うように適合される。
1320および/または制御回路1470は、前に述べた実施形態の技術を用いて、無線および/または手動による質問を行うように適合される。
他の実施形態では、害虫駆除装置310、410、510、610、710、810、1010、1110、1210、1310または1410に、システム20の害虫駆除装置110に関して説明した1つまたは複数の餌部材132を含めることができる。さらに、害虫駆除装置110、310、410、510、610、710、810、1010、1110、1210、1310および1410のいずれかを、地中配置、地表配置または地上配置されるように構成することができる。別の実施形態では、害虫駆除装置は、害虫駆除装置110、310、410、510、610、710、810、1010、1110、1210、1310または1410の2つ以上の感知技術を組み合わせるように適合される。さらに、またはその代わりに、2つ以上の異なるタイプの害虫駆除装置110、310、410、510、610、710、810、1010、1110、1210、1310および1410を使用して、共通の領域で害虫の活動を監視し、かつ/または、殺虫剤を送達することができる。
別の実施形態では、害虫が検出された後で、害虫駆除装置110、310、410、510、610、710、810、1010、1110、1210、1310または1410を完全にまたは部分的に殺虫剤送達装置で置き換えるように構成することができる。この置換えは、殺虫剤送達構成に組み込むために、害虫監視構成から通信回路モジュールその他の回路を取り外すことを含み得る。他の実施形態では、害虫駆除装置110、310、410、510、610、710、810、1010、1110、1210、1310または1410のいずれかを、害虫活動の監視および殺虫剤の送達を同時に行うように構成することができる。あるいは、またはそれに加えて、害虫駆除装置110、310、410、510、610、710、810、1010、1110、1210、1310および/または1410を、害虫による所与の度合いの消費または移動が検出された後で、殺虫剤を自動的に送達するように構成することができる。この構成では、監視データに従って、かつ/または、通信回路を介して受信した外部コマンドによって、自動的に送達のトリガをかけることができる。
図32のフローチャートに、本発明の別の実施形態の手順920を示す。プロセス920の段階922では、1つまたは複数の装置110、310、410、510、610、710、810、1010、1110、1210、1310および/または1410からデータを収集する。段階924では、環境条件および/または場所に関して収集したデータを分析する。次に、この分析から、段階926で害虫の行動を予測する。段階926の予測に従って、段階928で、1つまたは複数の追加の装置の設置を含み得る処置が取られる。
次に、段階932でループ930に入る。段階932では、装置からのデータ収集を継続し、段階934における害虫の行動の予測をよりよいものにする。次いで、制御は、手順920を継続するかどうかを検定する条件分岐936に移される。手順920を継続すべき場合には、ループ930は段階932に戻る。条件分岐936での検定に従って手順920を終了させるべき場合には、手順を停止する。
段階928に関連して、さらに、またはその代わりに実施し得る他の処置の例には、害虫の行動パターンを適用して、所与の領域において害虫が広がり得る方向をより正確に決めることが含まれる。したがって、この予測に基づいて警告を与えることができる。また、害虫駆除システムの宣伝および営業活動では、手順920に基づいて、より大きな利益が得られそうな地域を目標とすることができる。さらに、この情報を評価して、本発明の1つまたは複数の実施形態による害虫駆除業の需要が季節的に変動するかどうかを判定す
ることができる。機器または人員などの害虫駆除用のリソースの割当てをそれに従って調整することができる。さらに、害虫駆除装置の配置効率を高めることができる。
ることができる。機器または人員などの害虫駆除用のリソースの割当てをそれに従って調整することができる。さらに、害虫駆除装置の配置効率を高めることができる。
他の代替実施形態では、装置110、310、410、510、610、710、810、1010、1110、1210、1310および1410ならびに対応する質問機、データ収集ユニットおよびデータ収集器を、当業者が想起するであろう他の様々なシステムの組合せで使用することができる。質問機30およびワンド1102をそれぞれ手持ち型の形態で示すが、他の実施形態では、このような質問装置を異なる形態とすることができ、車両で運搬することができ、あるいはほぼ恒久的な場所に設置することができる。実際、データ収集ユニットを使用して、直接、害虫駆除装置に質問し、情報を受信することができる。また、装置110、310、410、510、610、710、810、1010、1110、1210、1310および1410用の餌は、シロアリに適した食用形態で提供することができるが、異なるタイプの害虫、昆虫または非昆虫を駆除するのに選択した餌の種類を選択することができ、異なるタイプの害虫の監視および根絶に適するように装置のハウジングその他の特性を調整することができる。さらに、装置110、310、410、510、610、710、810、1010、1110、1210、1310および1410用の餌は、標的とする種の害虫を引き寄せ、害虫によって実質上消費されないように選択した材料製のものとすることができる。一代替形態では、1つまたは複数の害虫駆除装置は、標的とする害虫によって移動または変化する非食料材料を含む。非限定的な例として、このタイプの材料を用いて、消耗する餌部材とともに、あるいはそれを伴わずに、消耗しない感知部材基板を形成することができる。さらに、本発明の害虫駆除装置は、湿気の侵入を減らすために、ポリウレタンその他の適当な樹脂を埋め込むか、あるいはエポキシその他の適当な樹脂を被覆した1つまたは複数のコンポーネントを含み得る。図3〜5に示すものの一代替実施形態では、カバー部120の内部リップ123がなく、Oリング124がない。この代替実施形態では、カバー部120にベース130を超音波溶接し、ポリウレタンを含む材料を用いて、回路筐体118を組み付けた後で空洞122中に残った空いているスペースを充填し、それによって、回路160に接触する湿気を減らす。ただし、本発明の他の実施形態では、このようにして湿気その他の物質の侵入に対処するのが望ましくないことがあり、当業者が想起するであろう異なるやり方で対処するか、あるいは全く対処しないことがあることを理解されたい。
別の代替形態では、本発明による1つまたは複数の害虫駆除装置は、ハウジング170またはハウジング1070(およびそれに対応して、キャップ180、キャップ1080、キャップ1180、キャップ1280またはキャップ1380)などのハウジングを欠く。その代わりに、この実施形態では、ハウジングの内容物を直接地中または監視すべき建築物の部材上に配置するか、あるいは当業者が想起するであろう異なる構成で配置することができる。あるいは、餌の消費または感知部材の移動により導体の移動が生じ、それによって、開路が生じる代わりに、電気経路を閉じるように本発明の害虫駆除装置のいずれかを構成することもできる。
無線通信技術に基づく害虫駆除装置は、質問機、データ収集ユニット、データ収集器または当業者が想起するであろう他の装置への配線式通信接続部を、代わりにまたはさらに含み得る。地域的な条件によって無線通信が妨げられるとき、あるいは、配線式接続部がその他の点で望まれる際には、診断目的用の無線通信の代替として配線式の通信を利用することができる。さらに、プロセス220および手順920を、本発明の趣旨から逸脱することなく様々な段階、操作および条件分岐を並べ直し、変更し、再配置し、置き換え、取り除き、繰り返し、組み合わせ、あるいは当業者が想起するであろう他のプロセスに追加して実施することができる。
別の実施形態では、害虫駆除装置は、1つまたは複数のエラストマ接続部材によって1
つまたは複数の感知素子に接続された回路を含む。これら1つまたは複数のエラストマ接続部材は、シリコーンゴムなどの炭素含有合成化合物からなり得る。
つまたは複数の感知素子に接続された回路を含む。これら1つまたは複数のエラストマ接続部材は、シリコーンゴムなどの炭素含有合成化合物からなり得る。
別の実施形態では、害虫駆除装置は、1種または複数種の害虫によって消費または移動されるように動作可能な餌と、この餌に近接した害虫感知回路と、指示器構成とを含む。この害虫感知回路および指示器構成に動作可能に接続され、害虫感知回路を監視し、害虫感知回路の状態の変化を検出し、この状態変化に対応する1つまたは複数の信号を指示器構成に提供するコントローラ回路も含み得る。この指示器構成では、これら1つまたは複数の信号に応答してその出力が変化する。この実施形態は、餌、害虫感知回路およびコントローラ回路を少なくとも部分的に封入するように動作可能であり、さらに、指示器構成の少なくとも一部が操作者に見えるような配置に構成される構造をさらに含み得る。一形態では、この指示器構成は2つの発光コンポーネントからなる。これらのコンポーネントの一方が、状態が変化する前に少なくとも間欠的に点灯し、これらのコンポーネントの他方が、状態が変化した後で少なくとも間欠的に点灯する。他の実施形態は、いくつかのこのような害虫駆除装置を備えるシステムを含む。
別の実施形態は、複数の害虫駆除装置を設置するステップであって、各害虫駆除装置が、1種または複数種の害虫用のそれぞれの餌、それぞれの害虫感知回路、それぞれの指示器構成およびそれぞれのコントローラ回路を含むステップと、それぞれの指示器構成によって害虫駆除装置の1つの第1状態を示すステップと、それぞれのコントローラ回路によってそれぞれの害虫感知回路の状態の変化を検出するステップと、この状態の変化に応答して、それぞれのコントローラ回路からの1つまたは複数の出力信号を調整するステップと、この調整に応答して、それぞれの指示器構成によって害虫駆除装置の1つの第2状態を示すステップとを含む。
本発明の別の実施形態は、一群の害虫駆除装置を含む。これらの装置はそれぞれ、双方向通信ポートと、1種または複数種の害虫の活動を検出する害虫感知回路と、餌と、この群内の他の装置の識別子に対して固有な識別子とを有する。各害虫駆除装置の双方向通信ポートは、双方向通信経路によってデータ収集ユニットに接続される。このデータ収集ユニットは、選択した害虫駆除装置の識別子の固有性に基づいて、双方向通信経路を介して選択した害虫駆除装置にアドレスし、選択した害虫駆除装置の害虫感知回路の状態を受信するように動作可能である。
本発明の別の実施形態は、通信経路によって一群の害虫駆除装置に接続されたデータ収集ユニット動作させるステップであって、これらの害虫駆除装置がそれぞれ、通信ポート、害虫感知回路およびこの群内の他の害虫駆除装置のアドレスに対して固有なアドレスを含むステップと、害虫駆除装置の1つの害虫感知回路でシロアリを感知するステップと、データ収集装置からアドレスを送信することに応答して害虫駆除装置の1つから感知情報を受信するステップとを含む。
本発明の別の実施形態は、複数の害虫駆除装置を動作させるステップであって、各害虫駆除装置が、1種または複数種の害虫用の餌、それぞれの害虫感知回路、それぞれの視覚的な指示器構成およびそれぞれのコントローラ回路を含むステップと、周期的な変化パターンに従って害虫駆除装置の1つのそれぞれの視覚的な指示器構成から光を供給して、害虫駆除装置の1つの一状態を表すステップとを含む。
別の形態は、複数の害虫駆除装置を設置するステップであって、各害虫駆除装置が、餌、害虫感知回路、視覚的な指示器構成およびコントローラ回路を含むステップと、装置の1つの指示器構成から第1の色の光を放出して第1状態を表すステップと、害虫駆除装置の1つの害虫感知回路の状態の変化を検出するステップと、この状態の変化に応答して、
害虫駆除装置の1つのコントローラ回路からの1つまたは複数の出力信号を調整するステップと、害虫駆除装置の1つの視覚的な指示器構成から第1の色とは異なる第2の色の光を放出して、それぞれの害虫感知回路の第1状態とは異なる第2状態を表すステップとを含む。
害虫駆除装置の1つのコントローラ回路からの1つまたは複数の出力信号を調整するステップと、害虫駆除装置の1つの視覚的な指示器構成から第1の色とは異なる第2の色の光を放出して、それぞれの害虫感知回路の第1状態とは異なる第2状態を表すステップとを含む。
本明細書で引用したすべての刊行物、特許および特許出願を参照によりここに組み込む。これら個々の刊行物、特許または特許出願を、具体的に個々に参照によりここに組み込み、それら全体を記載して示すもののように扱う。これらには、2002年3月21日出願の米国特許出願番号10/103,460、2001年8月9日出願の米国特許出願番号09/925,392、2000年9月25日出願の国際特許出願番号PCT/US00/26373、1999年7月21日出願の国際特許出願番号PCT/US99/16519、2000年9月25日出願の米国特許出願番号09/669,316および2001年3月20日出願の米国特許出願番号09/812,302が含まれるが、これらに限定されるものではない。さらに、ここで述べた任意の理論、提案された動作機構または知見は、本発明の理解をさらに深めるものとみなし、このような理論、提案された動作機構または知見により、本発明が限定されないものとする。図面および上記説明で本発明を詳細に示し説明してきたが、これらは、本質的に例示的かつ非限定的なものとみなす。選択した実施形態だけを示し説明してきたこと、また、本明細書または添付の特許請求の範囲で定義する本発明の範囲に含まれるすべての変更、均等物および改変が保護されるように望まれることを理解されたい。
Claims (56)
- 一群の害虫駆除装置であって、それぞれが、双方向通信ポート、1種または複数種の害虫の活動を検出する害虫感知回路、餌、前記群内の他の害虫駆除装置の識別子に対して固有な識別子を含む該害虫駆除装置と、
各害虫駆除装置の双方向通信ポートに接続された双方向通信経路と、
双方向通信経路に接続されたデータ収集装置とを備え、データ収集装置が、選択した害虫駆除装置の識別子の固有性に基づいて、双方向通信経路を介して前記選択した害虫駆除装置にアドレスし、前記選択した害虫駆除装置の害虫感知回路の状態を受信するように動作可能である、システム。 - 前記双方向通信経路が、各害虫駆除装置の双方向通信ポートおよびデータ収集装置に接続された電気ノードを含む、請求項1に記載のシステム。
- 前記双方向通信経路が、各害虫駆除装置およびデータ通信装置に接続された1対の導体で形成される、請求項1に記載のシステム。
- 前記データ収集装置が、マスタ/スレーブの関係で各害虫駆除装置と通信するようにプログラムされたコントローラを含み、該データ収集装置が、システムの状態を示す少なくとも1つの出力装置を含む、請求項3に記載のシステム。
- 前記害虫駆除装置に電力を供給するために、各前記害虫駆除装置および前記データ収集装置に接続された少なくとも1つの電源ラインをさらに備える、請求項4に記載のシステム。
- 1種または複数種の害虫によって消費または移動されるように動作可能な餌、害虫感知回路および害虫感知回路に接続された監視回路を含む害虫駆除装置と、
害虫駆除装置の外部にあり、それに磁界を選択的に印加する磁界源とを備え、
該監視回路が、該害虫感知回路についての状態の情報を出力するために、磁界に応答するアクティベーション装置を含む、システム。 - 前記磁界源が、操作者制御型のワンドの形態である、請求項6に記載のシステム。
- 前記害虫駆除装置が、それぞれ前記磁界源に応答する複数の害虫駆除装置の1つである、請求項6に記載のシステム。
- 前記害虫駆除装置が、第1発光形態および第1発光形態とは異なる第2発光形態を有する視覚的な指示器構成を含む、請求項6に記載のシステム。
- 前記アクティベーション装置が、前記磁界によって作動する磁気スイッチを含む、請求項6に記載のシステム。
- 1種または複数種の害虫によって消費または移動されるように動作可能な餌と、
該餌に近接した害虫感知回路と、
視覚的な指示器構成と、
害虫感知回路および指示器構成に動作可能に接続されたコントローラ回路であって、該害虫感知回路を自動的に監視し、害虫感知回路の状態の変化を検出し、前記状態変化に対応する1つまたは複数の信号を指示器構成に提供するようにプログラムされ、該指示器構成が、前記1つまたは複数の信号に応答して第1発光形態から第2発光形態に変わるコントローラと、
該餌、該害虫感知回路および該コントローラ回路を少なくとも部分的に封入するように機能することができ、さらに、指示器構成の少なくとも一部が操作者に見えるように配置される構成の構造とを備える、害虫駆除装置。 - 前記指示器構成が2つの発光コンポーネントを含み、第1の発光コンポーネントが点灯して前記第1発光形態が得られ、第2の発光コンポーネントが点灯して前記第2発光形態が得られる、請求項11に記載の装置。
- 前記第1発光形態が、前記第1の発光コンポーネントを点滅パターンで点灯させることを含む、請求項12に記載の装置。
- 1種または複数種の害虫によって消費または移動されるように動作可能な餌と、
害虫感知回路と、
該害虫感知回路に接続された通信回路であって、該通信回路による該害虫感知回路の質問のトリガをかけるアクティベーション装置と、前記質問に応答して決定された該害虫感知回路についての情報を提供する指示装置とを含む通信回路と、
所定の空間的な相互関係で、該餌、該害虫感知回路および該通信回路を配置するように機能することができる構造とを備える、害虫駆除装置。 - 前記装置構造が、支持構造、前記餌、前記害虫感知回路および前記通信回路を少なくとも部分的に封入するハウジングを含み、アクティベーション装置および指示装置がハウジングに搭載される、請求項14に記載の装置。
- 複数の害虫駆除装置を備えるシステムであって、各害虫駆除装置が、
1種または複数種の害虫によって消費または移動されるように動作可能な餌と、
害虫感知回路、アクティベーション装置および指示装置を含む回路構成とを備え、アクティベーション装置が、操作者による指令に従って該回路構成を選択的にアクティベーションさせるように動作可能であり、該指示装置が、アクティベーション装置による回路構成のアクティベーションに応答して、該害虫感知回路についての情報を操作者に提供するように動作可能である、システム。 - 前記餌および前記回路構成を少なくとも部分的に封入するハウジングをさらに備える、請求項16に記載のシステム。
- 前記アクティベーション装置および前記指示装置が前記ハウジングに搭載される、請求項17に記載のシステム。
- 前記害虫感知回路が、前記回路構成に選択的に接続され、それから選択的に取り外されるように動作可能な基板上に担持される、請求項16に記載のシステム。
- 前記アクティベーション装置がスイッチを含む、請求項14から19のいずれかに記載のシステムまたは装置。
- 前記指示装置が視覚的な指示器を含む、請求項14から19のいずれかに記載のシステムまたは装置。
- 前記アクティベーション装置がスイッチであり、前記指示装置が発光ダイオードであり、前記スイッチによって選択的に合わせて接続されるトランジスタおよび電源をさらに含む、請求項14から19のいずれかに記載のシステムまたは装置。
- 前記害虫感知回路が、基板上に、1種または複数種の害虫による消費または移動によって変化するように構成された導電ループを含む、請求項1から19のいずれかに記載のシステムまたは装置。
- 前記餌が殺虫剤を含む、請求項1から19のいずれかに記載のシステムまたは装置。
- 前記餌が、1種または複数種のシロアリ用に選択した監視タイプのものである、請求項1から19のいずれかに記載のシステムまたは装置。
- 通信経路によって一群の害虫駆除装置に接続されたデータ収集装置を動作させるステップであって、該各害虫駆除装置が、通信ポート、害虫感知回路および前記群内の他の害虫駆除装置のアドレスに関連する固有なアドレスを含むステップと、
該害虫駆除装置の1つの該害虫感知回路でシロアリを感知するステップと、
該データ収集装置からの前記1つの害虫駆除装置のアドレスの送信に応答して、前記1つの害虫駆除装置から、前記感知ステップに対応する情報を受信するステップとを含む、方法。 - 前記受信ステップが、前記データ収集装置と前記害虫駆除装置の1つの間の通信経路を介して双方向に通信するステップを含む、請求項26に記載の方法。
- 前記害虫感知回路が、基板上に、1種または複数種の害虫による消費または移動によって変化するように構成された導電ループを含み、前記感知ステップが、該ループが電気的に閉じた状態から、該ループが電気的に開いた状態への変化を判定するステップを含む、請求項26に記載の方法。
- 前記群内の各害虫駆除装置に、前記データ通信経路を介して前記異なる害虫駆除装置のアドレスを送信することによって、前記異なる害虫駆除装置の1つに質問を行うステップを含む、請求項26に記載の方法。
- それぞれ双方向通信ポートおよび1種または複数種の害虫の活動を検出するための害虫感知回路を含む複数の害虫駆除装置を設置するステップと、
データ収集装置および該各害虫駆除装置の双方向通信ポートを双方向通信経路に結合するステップと、
該データ収集装置により双方向通信経路を介して該各害虫駆除装置に個々にアドレスして、該各害虫駆除装置から害虫感知回路の情報を取得するステップとを含む、方法。 - 建築物内に前記データ収集装置を配置するステップを含む、請求項30に記載の方法。
- 前記設置ステップが、前記害虫駆除装置を少なくとも部分的に地中に配置するステップを含む、請求項30に記載の方法。
- 少なくとも1つの前記害虫駆除装置でシロアリを検出するステップと、前記検出ステップの後で、前記データ収集装置によって状態の変化を示すステップとを含む、請求項30に記載の方法。
- 前記害虫感知回路が、基板上に、1種または複数種の害虫による消費または移動によって変化するように構成された導電ループを含み、前記検出ステップが、該ループが電気的に閉じた状態から、該ループが電気的に開いた状態への変化を判定するステップを含む、請求項33に記載の方法。
- 前記結合ステップが、前記データ収集装置および前記害虫駆除装置を1対の導体に接続するステップを含み、前記導体の一方により電気的なノードが得られ、前記導体の他方により電気的な接地が得られる、請求項30に記載の方法。
- 前記各害虫駆除装置が餌を含む、請求項30に記載の方法。
- 前記各害虫駆除装置が餌を含む、請求項26に記載の方法。
- 餌、害虫感知部材および害虫感知部材の状態を監視する監視回路を含む害虫駆除装置を設置するステップと、
監視回路の動作を刺激するために、害虫駆除装置に磁界を印加するステップと、
前記印加ステップに応答して、監視回路から害虫感知部材についての情報を提供するステップとを含む、方法。 - 前記害虫駆除装置が、該餌、該害虫感知部材および該監視回路を少なくとも部分的に封入する筐体をさらに含み、該監視回路を動作させるために、該監視回路が磁界に応答する装置を含む、請求項38に記載の方法。
- 前記印加ステップが、前記害虫駆除装置の外部の磁界源によって行われる、請求項38に記載の方法。
- 前記印加ステップが、前記磁界源を有するワンドを害虫駆除装置に近接して配置するステップを含む、請求項40に記載の方法。
- 複数の害虫駆除装置を動作させるステップであって、各害虫駆除装置が、1種または複数種の害虫用のそれぞれの餌、それぞれの害虫感知回路、それぞれの視覚的な指示器構成およびそれぞれのコントローラ回路を含むステップと、
1つの害虫駆除装置のそれぞれの害虫感知回路の一状態を表す周期的な変化パターンに従って、前記1つの害虫駆除装置のそれぞれの視覚的な指示器構成から光を供給するステップとを含む、方法。 - 前記害虫駆除装置の1つに対するそれぞれのコントローラ回路によって、それぞれの害虫感知回路の状態の変化を検出するステップと、
前記状態変化に応答して、前記1つの害虫駆除装置のそれぞれのコントローラ回路からの1つまたは複数の出力信号を調整するステップと、
前記1つまたは複数の出力信号に応答して、それぞれの視覚的な指示器構成が提供する視覚的な指示を変更するステップとを含む、請求項42に記載の方法。 - 前記1つの状態が、前記検出ステップ前のそれぞれの害虫感知回路の状態に対応し、前記供給ステップ中に放出される光が第1の色のものであり、前記変更ステップが、前記1つの害虫駆除装置のそれぞれの害虫感知回路の別の状態を表す、第1の色とは異なる第2の色の光を放出するステップを含む、請求項43に記載の方法。
- 前記周期的な変化パターンが、視覚的な指示器構成によって第1の色の光を繰り返し点滅させることを含み、前記放出ステップが、第2の色の光を繰り返し点滅させるステップを含む、請求項44に記載の方法。
- 前記供給ステップが、オン状態とオフ状態の間で視覚的な指示器構成の発光装置を交互に切り替えて、点滅形態の周期的な変化パターンを提供するステップを含み、前記1つの状態が、前記1つの害虫駆除装置のそれぞれの害虫感知回路によって害虫の活動を検出す
るステップに対応する、請求項42に記載の方法。 - 前記周期的な変化パターンが、ゼロでない2つのレベル間で光の強度を変更することを含む、請求項42に記載の方法。
- 複数の害虫駆除装置を設置するステップであって、各害虫駆除装置が、1種または複数種の害虫用のそれぞれの餌、それぞれの害虫感知回路、それぞれの視覚的な指示器構成およびそれぞれのコントローラ回路を含むステップと、
1つの害虫駆除装置のそれぞれの指示器構成から、それぞれの害虫感知回路の第1状態を表す第1の色の光を放出するステップと、
前記1つの害虫駆除装置のそれぞれのコントローラ回路によって、それぞれの害虫感知回路の状態の変化を検出するステップと、
前記状態変化に応答して、前記1つの害虫駆除装置のそれぞれのコントローラ回路からの1つまたは複数の出力信号を調整するステップと、
前記1つの害虫駆除装置のそれぞれの視覚的な指示器構成から、それぞれの害虫感知回路の第2状態を表す、第1の色とは異なる第2の色の光を放出するステップとを含む、方法。 - 第1の色が緑色であり、第2の色が赤色である、請求項48に記載の方法。
- 第1の色の光および第2の色の光の少なくとも一方を点滅させるステップを含む、請求項48に記載の方法。
- 前記設置ステップが、それぞれのコントローラを、対応する接続部によりそれぞれの害虫感知回路に結合することによって、各害虫感知装置のそれぞれのコントローラ回路をアクティベーションさせるステップを含む、請求項42から50のいずれかに記載の方法。
- 害虫感知回路が、基板上に、1種または複数種の害虫による消費または移動によって変化するように構成された導電ループを含む、請求項42から50のいずれかに記載の方法。
- 前記検出ステップが、1種または複数種の害虫により徐々に消費または移動されることよって生じる、害虫感知回路の変化の第1の度合いから害虫感知回路の変化の第2の度合いへの移行を判定するステップを含む、請求項42から50のいずれかに記載の方法。
- 別の害虫駆除装置から放出される光を周期的に点滅させて、それぞれの害虫感知回路の所定の状態を表すステップを含む、請求項42から50のいずれかに記載の方法。
- 前記1つの害虫駆除装置のそれぞれの餌が殺虫剤を含む、請求項36から50のいずれかに記載の方法。
- 前記1つの害虫駆除装置のそれぞれの餌が、1種または複数種のシロアリ用に選択した監視タイプのものである、請求項36から50のいずれかに記載の方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/925,392 US7262702B2 (en) | 1999-07-21 | 2001-08-09 | Pest control devices, systems, and methods |
| US10/103,460 US7212129B2 (en) | 1999-07-21 | 2002-03-21 | Devices, systems, and method to control pests |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003518268A Division JP4064920B2 (ja) | 2001-08-09 | 2002-07-31 | 害虫の検出および駆除 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006296432A true JP2006296432A (ja) | 2006-11-02 |
Family
ID=26800484
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003518268A Expired - Fee Related JP4064920B2 (ja) | 2001-08-09 | 2002-07-31 | 害虫の検出および駆除 |
| JP2006148590A Pending JP2006296432A (ja) | 2001-08-09 | 2006-05-29 | 害虫の検出および駆除 |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003518268A Expired - Fee Related JP4064920B2 (ja) | 2001-08-09 | 2002-07-31 | 害虫の検出および駆除 |
Country Status (12)
| Country | Link |
|---|---|
| US (2) | US7212129B2 (ja) |
| EP (2) | EP1772054A3 (ja) |
| JP (2) | JP4064920B2 (ja) |
| KR (1) | KR20040036904A (ja) |
| CN (1) | CN1310582C (ja) |
| AT (1) | ATE354952T1 (ja) |
| BR (1) | BR0211812A (ja) |
| DE (1) | DE60218492D1 (ja) |
| ES (1) | ES2282507T3 (ja) |
| HK (1) | HK1074349A1 (ja) |
| TW (1) | TW568748B (ja) |
| WO (1) | WO2003013237A2 (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010512789A (ja) * | 2006-12-19 | 2010-04-30 | ダウ アグロサイエンシィズ エルエルシー | 信頼性の高い有害生物検出 |
| JP2012501647A (ja) * | 2008-09-09 | 2012-01-26 | ダウ アグロサイエンシィズ エルエルシー | ネットワーク化された有害生物防除システム |
| JP2013208126A (ja) * | 2006-12-21 | 2013-10-10 | Dow Agrosciences Llc | 熱可塑性ポリマー、有害生物食用材料、および殺有害生物剤を含む複合材料 |
| JP2020526199A (ja) * | 2017-07-07 | 2020-08-31 | ビーエーエスエフ コーポレーション | 導電性電極を備えた有害生物監視システム |
Families Citing this family (58)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6825765B2 (en) * | 1998-12-30 | 2004-11-30 | Automotive Systems Laboratory, Inc. | Occupant detection system |
| ATE290314T1 (de) * | 1999-07-21 | 2005-03-15 | Dow Agrosciences Llc | Schädlingsbekämpfungsverfahren |
| US7212112B2 (en) * | 1999-07-21 | 2007-05-01 | Dow Agrosciences Llc | Detection and control of pests |
| US7212129B2 (en) | 1999-07-21 | 2007-05-01 | Dow Agrosciences Llc | Devices, systems, and method to control pests |
| US6370811B1 (en) * | 2000-07-31 | 2002-04-16 | Michael J. Masterson | Apparatus and method for monitoring termite activity |
| ES2600780T3 (es) | 2002-03-21 | 2017-02-10 | Dow Agrosciences, Llc | Método de control de plagas |
| TW536479B (en) * | 2002-09-05 | 2003-06-11 | Benq Corp | Inkjet printer using thermal sensing elements to identify different types of cartridges |
| US20050078005A1 (en) * | 2003-10-14 | 2005-04-14 | Contadini Carl D. | Replacement indicator |
| KR100646836B1 (ko) * | 2004-02-28 | 2006-11-17 | 주식회사 세스코 | 쥐 감지 및 모니터링 시스템 |
| JP4783181B2 (ja) * | 2006-03-13 | 2011-09-28 | 株式会社東芝 | 行動予測装置 |
| MY152693A (en) * | 2007-07-26 | 2014-11-28 | Dow Agrosciences Llc | Techniques for maintaining palatability of a bait material in a pest control device |
| US8222996B2 (en) * | 2007-12-31 | 2012-07-17 | Intel Corporation | Radio frequency identification tags adapted for localization and state indication |
| TWI478665B (zh) * | 2008-08-19 | 2015-04-01 | Dow Agrosciences Llc | 含有聚胺甲酸酯發泡體之誘餌材料、害蟲監控裝置及其他的害蟲管控裝置 |
| US20100071257A1 (en) * | 2008-09-20 | 2010-03-25 | Shang-Chieh Tsai | Illuminating Device and system for Killing and/or Intefering with Pests, and Method for Killing and/or Interfering with Pests |
| CA2762492C (en) | 2009-05-22 | 2016-06-14 | Berntsen International, Inc. | System, method and monument for land surveying |
| WO2011094402A1 (en) * | 2010-01-27 | 2011-08-04 | Berntsen International, Inc. | Locator assembly for detecting, locating and identifying buried objects and method of use |
| US20120198754A1 (en) * | 2011-02-07 | 2012-08-09 | Michael Tarnower | System and Method for a Barrier Installation to Control Bed Bugs |
| WO2012127383A1 (en) | 2011-03-18 | 2012-09-27 | Ecolab Usa Inc. | Heat system for killing pests |
| US8861167B2 (en) | 2011-05-12 | 2014-10-14 | Global Plasma Solutions, Llc | Bipolar ionization device |
| US9433201B2 (en) * | 2011-08-26 | 2016-09-06 | Joseph F. Azzarello, JR. | Pest control system and method |
| US9723829B2 (en) * | 2011-08-26 | 2017-08-08 | Marcus Azzarello | Pest control system and method |
| US9974295B2 (en) | 2011-08-26 | 2018-05-22 | Marcus Azzarello | Pest control system and method |
| US10178858B2 (en) | 2011-08-26 | 2019-01-15 | Marcus Azzarello | Pest control system and method |
| US9723828B2 (en) * | 2011-08-26 | 2017-08-08 | Marcus Azzarello | Pest control above-ground system and method |
| KR200460124Y1 (ko) * | 2011-11-10 | 2012-05-04 | 김종률 | 해충 방지용 가로등 |
| EP2944155A4 (en) | 2013-01-08 | 2016-08-31 | Michael Gilbert | MONITORING AND CONTROL SYSTEMS FOR AGRICULTURE |
| US9930879B2 (en) | 2013-07-26 | 2018-04-03 | S.C. Johnson & Son, Inc. | Packaging cue system for consumer products |
| US9177243B2 (en) * | 2013-09-03 | 2015-11-03 | Overair Proximity Technologies Ltd. | Passive RFID transponder with powered element |
| PL3043642T3 (pl) * | 2013-09-10 | 2018-05-30 | Basf Se | System i sposób monitorowania szkodników |
| GB201403806D0 (en) * | 2014-03-04 | 2014-04-16 | Reckitt Benckiser Brands Ltd | Remotely controlled active dispensing device |
| WO2015179899A1 (en) | 2014-05-28 | 2015-12-03 | Pesense Pty Ltd | Pest detection |
| EP3214929A4 (en) * | 2014-11-04 | 2018-10-24 | Dow AgroSciences LLC | Pest control system and method of operating same |
| CN104430277A (zh) * | 2014-11-28 | 2015-03-25 | 广西大学 | 太阳能白蚁防治系统 |
| US9999212B2 (en) | 2015-02-13 | 2018-06-19 | Delta Five, Llc | Insect traps and monitoring system |
| US9999211B2 (en) | 2015-02-13 | 2018-06-19 | Delta Five, Llc | Insect traps and monitoring system |
| US9664813B2 (en) | 2015-02-13 | 2017-05-30 | Delta Five, Llc | Automated insect monitoring system |
| CN104699111A (zh) * | 2015-03-25 | 2015-06-10 | 成都好飞机器人科技有限公司 | 基于无人机的病虫害防治设备 |
| CN104770347B (zh) * | 2015-04-15 | 2017-09-15 | 李学恩 | 一种便携式智能型虫情测报系统 |
| JP6510145B2 (ja) * | 2015-07-08 | 2019-05-08 | 浙江鼎昆環境科技有限公司Zhejiang Dekan Environment Technology Co., Ltd. | シロアリ検出装置、検出システム及び検出方法 |
| US11051504B2 (en) | 2015-07-13 | 2021-07-06 | Basf Corporation | Pest control and detection system with conductive bait matrix |
| US10531653B2 (en) * | 2016-02-03 | 2020-01-14 | Iot Sense, Llc | Pest trap monitor |
| WO2017205619A1 (en) | 2016-05-27 | 2017-11-30 | Berntsen International, Inc. | Uhf rfid tag for marking underground assets and locations and methods of using same |
| AU2017293656A1 (en) * | 2016-07-08 | 2019-01-17 | Commonwealth Scientific And Industrial Research Organisation | Pest deterrent system |
| EP4328951A3 (en) | 2017-01-06 | 2024-04-10 | Discovery Purchaser Corporation | Sensor for a wireless animal trap detection system |
| US11564386B2 (en) | 2017-08-22 | 2023-01-31 | Vm Products, Inc. | Methods and systems of pest management |
| US10694338B2 (en) | 2017-11-07 | 2020-06-23 | Pica Product Development, Llc | Cellular automated external defibrillator (AED) tracker |
| US10909830B1 (en) | 2017-11-07 | 2021-02-02 | Pica Product Development, Llc | Personal emergency alert system, method and device |
| US10798541B2 (en) | 2017-11-07 | 2020-10-06 | Pica Product Development, Llc | Systems, methods and devices for remote trap monitoring |
| CN107751142A (zh) * | 2017-11-22 | 2018-03-06 | 杭州三速科技有限公司 | 基于移动通信的智能型白蚁监控装置 |
| CN108271765B (zh) * | 2018-01-05 | 2021-01-12 | 湘潭大学 | 一种多功能爪头监控环境机器人及其植物识别方法 |
| DE102018107274B3 (de) * | 2018-03-27 | 2019-07-18 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Vorrichtung und Verfahren zur Beaufschlagung eines Fluginsekts mit Tilgungsstrahlung |
| EP3813528B1 (en) * | 2018-06-29 | 2024-03-13 | Smart Wave Technologies, Inc. | Pest control system having event monitoring |
| CN111011344A (zh) * | 2018-10-09 | 2020-04-17 | 罗源 | 一种粮仓门窗杀虫专用装置及其使用方法 |
| KR102202071B1 (ko) * | 2019-01-31 | 2021-01-14 | (주)인터아이 | 흰개미 포획 모니터링 시스템 |
| US11344020B1 (en) * | 2020-05-08 | 2022-05-31 | Royal Guemar Group, LLC | System of home improvement devices in communication over a low power wide area network |
| US11116200B1 (en) * | 2020-05-15 | 2021-09-14 | Robert H. Hodam | Abatement of insect colonies |
| US20220192171A1 (en) * | 2020-12-17 | 2022-06-23 | OTS INVESTCO INC. (Ontario Corporation No 00243119) | Pest control system and method for use thereof |
| WO2023177348A1 (en) * | 2022-03-15 | 2023-09-21 | Lexikon Pte. Ltd. | Termite alert device |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59202734A (ja) * | 1983-05-04 | 1984-11-16 | Takamisawa Saibaneteitsukusu:Kk | 近接スイツチ |
| JPH034634U (ja) * | 1989-06-07 | 1991-01-17 | ||
| JPH0670099U (ja) * | 1993-02-24 | 1994-09-30 | 松下電工株式会社 | ドアホン子器 |
| JPH08223646A (ja) * | 1995-02-17 | 1996-08-30 | Fujitsu Ltd | 移動無線端末の電池電圧低下の警告表示回路 |
| JPH0998701A (ja) * | 1995-10-04 | 1997-04-15 | Ikari Shodoku Kk | シロアリ検知装置 |
| JPH11239440A (ja) * | 1998-02-25 | 1999-09-07 | Sharp Corp | 食害計測端末装置 |
| JP2001156728A (ja) * | 1999-11-30 | 2001-06-08 | Denso Corp | 電子機器および電子機器の動作状態出力方法 |
Family Cites Families (84)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3564750A (en) | 1968-08-06 | 1971-02-23 | John Burgess | Subterranean termite detector-exterminator |
| US3778805A (en) | 1972-02-11 | 1973-12-11 | Cable Switch Corp | Alarm utilizing pressure and temperature responsive switch |
| US3836842A (en) | 1973-01-22 | 1974-09-17 | Bell Canada Northern Electric | Encapsulated electrically resonant circuit and interrogating apparatus and method for finding same in various locations |
| FI57181C (fi) | 1975-09-11 | 1980-06-10 | Ovako Oy | Fastransformationsmaetare |
| US4127110A (en) | 1976-05-24 | 1978-11-28 | Huntington Institute Of Applied Medical Research | Implantable pressure transducer |
| US4074456A (en) | 1976-10-18 | 1978-02-21 | Robert Wayne Tidwell | Pest trap |
| GB1513190A (en) | 1976-11-16 | 1978-06-07 | Thorn Domestic Appliances Ltd | Insect exterminating apparatus |
| US4136338A (en) | 1977-03-08 | 1979-01-23 | James D. Pauls & Associates, Ltd. | Perimeter alarm apparatus |
| US4144668A (en) * | 1977-09-19 | 1979-03-20 | Kris Darncharnjitt | Insect trap |
| US4265252A (en) | 1978-04-19 | 1981-05-05 | The Johns Hopkins University | Intracranial pressure implant |
| US4366644A (en) | 1978-05-05 | 1983-01-04 | Daniel J. Bondy | Method and apparatus for termite control |
| US4248005A (en) * | 1979-05-29 | 1981-02-03 | Delta Promotions, Inc. | Electronic insect killer |
| US4472904A (en) | 1982-06-01 | 1984-09-25 | Star-Trap, Incorporated | Rodent trap with improved sensitivity |
| US4455441A (en) | 1982-09-24 | 1984-06-19 | Research Foundation Of State University Of New York | Attractant termiticidal compounds, compositions and methods of use therefor |
| US4653221A (en) | 1982-09-24 | 1987-03-31 | Pratscher Andrew J | Animal trap |
| US4688026A (en) | 1984-05-15 | 1987-08-18 | Scribner James R | Method of collecting and using data associated with tagged objects |
| US5209233A (en) | 1985-08-09 | 1993-05-11 | Picker International, Inc. | Temperature sensing and control system for cardiac monitoring electrodes |
| US4737770A (en) | 1986-03-10 | 1988-04-12 | Interactive Technologies, Inc. | Security system with programmable sensor and user data input transmitters |
| US4843752A (en) | 1986-04-09 | 1989-07-04 | Sanix, Inc. | Acarid exterminating device |
| US4961283A (en) | 1986-08-29 | 1990-10-09 | Charles Forbes | Extermination of insects by heat |
| US4737789A (en) | 1986-12-02 | 1988-04-12 | X Cyte, Inc. | Inductive antenna coupling for a surface acoustic wave transponder |
| GB8704375D0 (en) | 1987-02-25 | 1987-04-01 | Rentokil Ltd | Pest monitoring system |
| US5042194A (en) | 1987-03-13 | 1991-08-27 | The Research Foundation Of State University Of New York | Insect traps |
| JP2750735B2 (ja) | 1988-12-27 | 1998-05-13 | 日東電工株式会社 | イエシロアリ及び/又はヤマトシロアリの捕虫検知及び防除方法並びにこの方法で使用する道標べ組成物 |
| US4988510A (en) | 1989-06-29 | 1991-01-29 | The United States Of America As Represented By The Secretary Of Agriculture | Insect control system |
| US4951057A (en) | 1989-11-13 | 1990-08-21 | X-Cyte, Inc. | Inductive input/output coupling for a surface acoustic wave device |
| US5134892A (en) | 1990-09-27 | 1992-08-04 | International Flavors & Fragrances Inc. | Electronic insect repellency and attractancy tester |
| CA2035080C (en) | 1991-01-28 | 1996-04-30 | Michael Smith | Pump monitor |
| IL105772A (en) | 1992-06-01 | 1998-07-15 | Univ Florida | Methods and materials for pest control |
| US5329726A (en) | 1992-09-08 | 1994-07-19 | Thorne Barbara L | System for termite detection and control |
| US5285688A (en) | 1992-09-17 | 1994-02-15 | Regents Of The University Of Minnesota | System for detecting wood-destroying insect infestations in wood |
| TW263421B (ja) | 1993-07-07 | 1995-11-21 | Sharp Kk | |
| JPH0743460A (ja) | 1993-07-26 | 1995-02-14 | Heisei Polymer Co Ltd | 地中埋設物の検出装置 |
| US5564222A (en) | 1993-12-03 | 1996-10-15 | Environmental Laboratories, Inc. | Method and articles for killing termites |
| US5592774A (en) | 1994-02-10 | 1997-01-14 | Nisus Corp. | Termite activity remote monitoring and information system |
| US5428345A (en) | 1994-03-30 | 1995-06-27 | Sentrol, Inc. | Method of and apparatus for operating a security system to produce an alarm signal |
| US5764138A (en) | 1994-04-29 | 1998-06-09 | Hid Corporation | RF identification system for providing static data and one bit of variable data representative of an external stimulus |
| US5429735A (en) | 1994-06-27 | 1995-07-04 | Miles Inc. | Method of making and amperometric electrodes |
| JP2722326B2 (ja) | 1994-06-29 | 1998-03-04 | 株式会社キャッツ | 白蟻警報装置 |
| US5528222A (en) | 1994-09-09 | 1996-06-18 | International Business Machines Corporation | Radio frequency circuit and memory in thin flexible package |
| GB9419513D0 (en) | 1994-09-28 | 1994-11-16 | Enviromed Plc | Electrochemical oxygen sensor |
| US5910776A (en) | 1994-10-24 | 1999-06-08 | Id Technologies, Inc. | Method and apparatus for identifying locating or monitoring equipment or other objects |
| US5661651A (en) | 1995-03-31 | 1997-08-26 | Prince Corporation | Wireless vehicle parameter monitoring system |
| JPH0926320A (ja) | 1995-07-12 | 1997-01-28 | Sekisui Chem Co Ltd | 標識体およびその探査システム |
| JPH09147252A (ja) | 1995-09-22 | 1997-06-06 | Fuara Syst:Kk | センサーおよびそれを用いたゲート式/自鳴式両用防犯タグ |
| US5648758A (en) | 1995-11-03 | 1997-07-15 | Ford Motor Company | Pre-assembled glass breakage detector applique |
| US5877422A (en) | 1995-12-19 | 1999-03-02 | Cats, Inc. | Termite detection apparatus and termite alarm unit employing this termite detection apparatus |
| EP0877550B1 (en) | 1996-01-25 | 2003-04-23 | Nimocks, David, R., III | Termite interception and baiting system and method of use thereof |
| US6130602A (en) | 1996-05-13 | 2000-10-10 | Micron Technology, Inc. | Radio frequency data communications device |
| JPH1056935A (ja) | 1996-06-10 | 1998-03-03 | Sanitsukusu:Kk | シロアリの検知方法及びその装置 |
| US5864241A (en) | 1996-08-08 | 1999-01-26 | International Business Machines Corporation | Magnetic transducer with wear indicator in a magnetic data storage system |
| JPH1084834A (ja) | 1996-09-12 | 1998-04-07 | Duskin Co Ltd | シロアリ検知機 |
| JPH10105861A (ja) | 1996-09-25 | 1998-04-24 | Nippon Telegr & Teleph Corp <Ntt> | センサ信号伝送方法及び装置 |
| US5815090A (en) * | 1996-10-31 | 1998-09-29 | University Of Florida Research Foundation, Inc. | Remote monitoring system for detecting termites |
| US6025725A (en) | 1996-12-05 | 2000-02-15 | Massachusetts Institute Of Technology | Electrically active resonant structures for wireless monitoring and control |
| MY115581A (en) | 1997-04-15 | 2003-07-31 | Dow Agrosciences | Improved methods and appratus for monitoring or controlling pests |
| US6111520A (en) | 1997-04-18 | 2000-08-29 | Georgia Tech Research Corp. | System and method for the wireless sensing of physical properties |
| US6339897B1 (en) | 1997-07-08 | 2002-01-22 | Microfab Technologies, Inc. | Method and apparatus for dispensing airborne materials for controlling pests |
| US5894818A (en) | 1997-07-16 | 1999-04-20 | Betzen; Keith | Electric animal repelling and training device |
| US5986570A (en) | 1997-09-03 | 1999-11-16 | Micron Communications, Inc. | Method for resolving signal collisions between multiple RFID transponders in a field |
| US5892444A (en) | 1998-01-10 | 1999-04-06 | Guardian Product Development, Inc. | Alarm system for a card holder |
| US5974344A (en) | 1998-03-02 | 1999-10-26 | Shoemaker, Ii; Charles | Wound care electrode |
| US5974726A (en) | 1998-06-05 | 1999-11-02 | Creeger; Samuel M. | Method of controlling pests and associated apparatus |
| US6178834B1 (en) | 1999-02-19 | 2001-01-30 | Entomobiotics Inc. | System and method of detecting, concentrating and suppressing subterranean termites |
| US6404210B1 (en) | 1999-03-02 | 2002-06-11 | University Of Florida Research Foundation, Inc. | Dimensionally stable sensor for monitoring termite activity |
| EP1194762B1 (en) | 1999-06-17 | 2005-10-05 | Smiths Detection Inc. | Multiple sensing system and device |
| US6150944A (en) * | 1999-07-15 | 2000-11-21 | Relative Solutions Corporation | Termite detection apparatus |
| ATE290314T1 (de) | 1999-07-21 | 2005-03-15 | Dow Agrosciences Llc | Schädlingsbekämpfungsverfahren |
| US7348890B2 (en) | 1999-07-21 | 2008-03-25 | Dow Agrosciences Llc | Pest control techniques |
| US7212129B2 (en) | 1999-07-21 | 2007-05-01 | Dow Agrosciences Llc | Devices, systems, and method to control pests |
| US7212112B2 (en) | 1999-07-21 | 2007-05-01 | Dow Agrosciences Llc | Detection and control of pests |
| US7262702B2 (en) | 1999-07-21 | 2007-08-28 | Dow Agrosciences Llc | Pest control devices, systems, and methods |
| US6914529B2 (en) | 1999-07-21 | 2005-07-05 | Dow Agrosciences Llc | Sensing devices, systems, and methods particularly for pest control |
| US6724312B1 (en) | 1999-07-21 | 2004-04-20 | Daniel Barber | Pest control apparatus and methods |
| US6255959B1 (en) | 1999-08-12 | 2001-07-03 | Micron Technology, Inc. | Electrical apparatuses, methods of forming electrical apparatuses, and termite sensing methods |
| US6304185B1 (en) | 1999-08-12 | 2001-10-16 | Micron Technology, Inc. | Devices for sensing living organisms, devices for sensing termites, methods of forming devices for sensing termites, and methods for sensing termites |
| US6100805A (en) | 1999-08-12 | 2000-08-08 | Micron Technology, Inc. | Devices for sensing termites and other living organisms, and methods of forming devices for sensing termites |
| US6281799B1 (en) | 1999-08-12 | 2001-08-28 | Micron Technology, Inc. | Devices for sensing changes in environments proximate the devices, devices for sensing termites, and methods for sensing termites |
| US6313748B1 (en) | 1999-08-27 | 2001-11-06 | Micron Technology, Inc. | Electrical apparatuses, termite sensing apparatuses, methods of forming electrical apparatuses, and methods of sensing termites |
| US6243014B1 (en) | 1999-08-27 | 2001-06-05 | Micron Technology, Inc. | Electrical apparatuses, termite sensing apparatuses, and methods of forming electrical apparatuses |
| US6478440B1 (en) | 2000-03-10 | 2002-11-12 | S.C. Johnson & Son, Inc. | Night light air freshener |
| AU2003222088A1 (en) | 2002-03-29 | 2003-10-20 | Ecolab Inc. | Method and apparatus for capacitively sensing pests |
| US7165353B2 (en) | 2003-10-29 | 2007-01-23 | Ecolab Inc. | Insect suppression station |
| US7591099B2 (en) | 2005-08-30 | 2009-09-22 | Ecolab Inc. | Bed bug monitor |
-
2002
- 2002-03-21 US US10/103,460 patent/US7212129B2/en not_active Expired - Fee Related
- 2002-07-31 EP EP07000064A patent/EP1772054A3/en not_active Withdrawn
- 2002-07-31 CN CNB028197305A patent/CN1310582C/zh not_active Expired - Fee Related
- 2002-07-31 AT AT02794646T patent/ATE354952T1/de not_active IP Right Cessation
- 2002-07-31 DE DE60218492T patent/DE60218492D1/de not_active Expired - Lifetime
- 2002-07-31 JP JP2003518268A patent/JP4064920B2/ja not_active Expired - Fee Related
- 2002-07-31 KR KR10-2004-7002004A patent/KR20040036904A/ko not_active Application Discontinuation
- 2002-07-31 ES ES02794646T patent/ES2282507T3/es not_active Expired - Lifetime
- 2002-07-31 EP EP02794646A patent/EP1424888B1/en not_active Expired - Lifetime
- 2002-07-31 BR BRPI0211812-2A patent/BR0211812A/pt not_active IP Right Cessation
- 2002-07-31 WO PCT/US2002/024186 patent/WO2003013237A2/en active Search and Examination
- 2002-08-08 TW TW091117880A patent/TW568748B/zh not_active IP Right Cessation
-
2005
- 2005-07-08 HK HK05105775A patent/HK1074349A1/xx not_active IP Right Cessation
-
2006
- 2006-05-29 JP JP2006148590A patent/JP2006296432A/ja active Pending
- 2006-11-28 US US11/605,009 patent/US7719429B2/en not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS59202734A (ja) * | 1983-05-04 | 1984-11-16 | Takamisawa Saibaneteitsukusu:Kk | 近接スイツチ |
| JPH034634U (ja) * | 1989-06-07 | 1991-01-17 | ||
| JPH0670099U (ja) * | 1993-02-24 | 1994-09-30 | 松下電工株式会社 | ドアホン子器 |
| JPH08223646A (ja) * | 1995-02-17 | 1996-08-30 | Fujitsu Ltd | 移動無線端末の電池電圧低下の警告表示回路 |
| JPH0998701A (ja) * | 1995-10-04 | 1997-04-15 | Ikari Shodoku Kk | シロアリ検知装置 |
| JPH11239440A (ja) * | 1998-02-25 | 1999-09-07 | Sharp Corp | 食害計測端末装置 |
| JP2001156728A (ja) * | 1999-11-30 | 2001-06-08 | Denso Corp | 電子機器および電子機器の動作状態出力方法 |
Cited By (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012147794A (ja) * | 2006-12-19 | 2012-08-09 | Dow Agrosciences Llc | 信頼性の高い有害生物検出 |
| JP2010512789A (ja) * | 2006-12-19 | 2010-04-30 | ダウ アグロサイエンシィズ エルエルシー | 信頼性の高い有害生物検出 |
| US9775341B2 (en) | 2006-12-21 | 2017-10-03 | Dow Agrosciences Llc | Composite material including a thermoplastic polymer, a pest food material and a pesticide |
| JP2013208126A (ja) * | 2006-12-21 | 2013-10-10 | Dow Agrosciences Llc | 熱可塑性ポリマー、有害生物食用材料、および殺有害生物剤を含む複合材料 |
| US9101124B2 (en) | 2006-12-21 | 2015-08-11 | Dow Agrosciences Llc | Composite material including a thermoplastic polymer, a pest food material and a pesticide |
| JP2017000150A (ja) * | 2006-12-21 | 2017-01-05 | ダウ アグロサイエンシィズ エルエルシー | 熱可塑性ポリマー、有害生物食用材料、および殺有害生物剤を含む複合材料 |
| US9861097B2 (en) | 2006-12-21 | 2018-01-09 | Dow Agrosciences Llc | Method of making a composite material including a thermoplastic polymer, a pest food material and a pesticide |
| JP2018046845A (ja) * | 2006-12-21 | 2018-03-29 | ダウ アグロサイエンシィズ エルエルシー | 熱可塑性ポリマー、有害生物食用材料、および殺有害生物剤を含む複合材料 |
| JP2018161131A (ja) * | 2006-12-21 | 2018-10-18 | ダウ アグロサイエンシィズ エルエルシー | 熱可塑性ポリマー、有害生物食用材料、および殺有害生物剤を含む複合材料 |
| US11083193B2 (en) | 2006-12-21 | 2021-08-10 | Dow Agrosciences Llc | Method of making a composite material including a thermoplastic polymer, a pest food material and a pesticide |
| US11350627B2 (en) | 2006-12-21 | 2022-06-07 | Corteva Agriscience | Composite material including a thermoplastic polymer, a pest food material, and a pesticide |
| JP2012501647A (ja) * | 2008-09-09 | 2012-01-26 | ダウ アグロサイエンシィズ エルエルシー | ネットワーク化された有害生物防除システム |
| JP2020526199A (ja) * | 2017-07-07 | 2020-08-31 | ビーエーエスエフ コーポレーション | 導電性電極を備えた有害生物監視システム |
| JP7341977B2 (ja) | 2017-07-07 | 2023-09-11 | ビーエーエスエフ コーポレーション | 導電性電極を備えた有害生物監視システム |
Also Published As
| Publication number | Publication date |
|---|---|
| ES2282507T3 (es) | 2007-10-16 |
| ATE354952T1 (de) | 2006-03-15 |
| US7719429B2 (en) | 2010-05-18 |
| BR0211812A (pt) | 2007-01-09 |
| JP2005527182A (ja) | 2005-09-15 |
| DE60218492D1 (de) | 2007-04-12 |
| CN1564657A (zh) | 2005-01-12 |
| US20020101352A1 (en) | 2002-08-01 |
| US20070120690A1 (en) | 2007-05-31 |
| WO2003013237A2 (en) | 2003-02-20 |
| HK1074349A1 (en) | 2005-11-11 |
| TW568748B (en) | 2004-01-01 |
| EP1772054A2 (en) | 2007-04-11 |
| JP4064920B2 (ja) | 2008-03-19 |
| EP1424888A1 (en) | 2004-06-09 |
| KR20040036904A (ko) | 2004-05-03 |
| CN1310582C (zh) | 2007-04-18 |
| EP1424888B1 (en) | 2007-02-28 |
| EP1772054A3 (en) | 2008-07-02 |
| US7212129B2 (en) | 2007-05-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4064920B2 (ja) | 害虫の検出および駆除 | |
| US8111155B2 (en) | Detection and control of pests | |
| US7262702B2 (en) | Pest control devices, systems, and methods | |
| US6914529B2 (en) | Sensing devices, systems, and methods particularly for pest control | |
| US6724312B1 (en) | Pest control apparatus and methods | |
| EP1229787B1 (en) | Sensing devices, systems, and methods particularly for pest control | |
| JP4394457B2 (ja) | 有害小動物を駆除するための方法および装置 | |
| CN101023743A (zh) | 虫害的检测与防治 | |
| EP1985177B1 (en) | Sensing devices, systems and methods particularly for prest control | |
| JP4863734B2 (ja) | 害虫駆除用の感知デバイス、システム、および方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20060720 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090929 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100316 |