JP2006129069A - 撮像装置及び撮像方法 - Google Patents
撮像装置及び撮像方法 Download PDFInfo
- Publication number
- JP2006129069A JP2006129069A JP2004314527A JP2004314527A JP2006129069A JP 2006129069 A JP2006129069 A JP 2006129069A JP 2004314527 A JP2004314527 A JP 2004314527A JP 2004314527 A JP2004314527 A JP 2004314527A JP 2006129069 A JP2006129069 A JP 2006129069A
- Authority
- JP
- Japan
- Prior art keywords
- video signal
- imaging
- correction processing
- distortion correction
- imaging lens
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims description 44
- 230000000750 progressive effect Effects 0.000 claims abstract description 71
- 238000003384 imaging method Methods 0.000 claims description 179
- 238000006243 chemical reaction Methods 0.000 claims description 45
- 230000008569 process Effects 0.000 claims description 27
- 238000004590 computer program Methods 0.000 claims description 10
- 230000006870 function Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 8
- 230000002194 synthesizing effect Effects 0.000 description 4
- 230000008859 change Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 101100115215 Caenorhabditis elegans cul-2 gene Proteins 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 238000011946 reduction process Methods 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/01—Conversion of standards, e.g. involving analogue television standards or digital television standards processed at pixel level
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T5/00—Image enhancement or restoration
- G06T5/80—Geometric correction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/01—Conversion of standards, e.g. involving analogue television standards or digital television standards processed at pixel level
- H04N7/0117—Conversion of standards, e.g. involving analogue television standards or digital television standards processed at pixel level involving conversion of the spatial resolution of the incoming video signal
- H04N7/012—Conversion between an interlaced and a progressive signal
Landscapes
- Engineering & Computer Science (AREA)
- Computer Graphics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Studio Devices (AREA)
Abstract
【解決手段】 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを有し、インタレース走査の映像信号を出力する撮像手段と、前記撮像手段から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換手段と、前記変換手段から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理手段とを設け、プログレッシブ走査の映像信号に対して歪み補正処理を行うことにより、垂直方向の情報量が倍の状態で歪み補正処理を行うことができるようにする。
【選択図】 図1
Description
また、拡大縮小処理と歪み補正処理の両方を良好に行うことができるようにすることを第2の目的とする。
また、高精度な歪み補正処理及び拡大縮小処理の両方を行うことができるようにすることを第3の目的とする。
また、本発明の撮像装置の他の特徴とするところは、撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを有し、映像信号を出力する撮像手段と、前記撮像手段から出力された映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理手段と、前記歪み補正処理手段から出力された映像信号のサイズを変更するサイズ変更手段とを備えることを特徴としている。
また、本発明の撮像装置のその他の特徴とするところは、撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを有し、インタレース走査の映像信号を出力する撮像手段と、前記撮像手段から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換手段と、前記変換手段から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理手段と、前記歪み補正処理手段から出力された映像信号のサイズを変更するサイズ変更手段とを備えることを特徴としている。
また、本発明の撮像方法の他の特徴とするところは、撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、映像信号を出力する撮像工程と、前記撮像工程から出力された映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程と、前記歪み補正処理工程から出力された映像信号のサイズを変更するサイズ変更工程とを有することを特徴としている。
また、本発明の撮像方法のその他の特徴とするところは、撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、インタレース走査の映像信号を出力する撮像工程と、前記撮像工程から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換工程と、前記変換工程から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程と、前記歪み補正処理工程から出力された映像信号のサイズを変更するサイズ変更工程とを有することを特徴としている。
また、本発明のコンピュータプログラムの他の特徴とするところは、撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、映像信号を出力する撮像工程と、前記撮像工程から出力された映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程と、前記歪み補正処理工程から出力された映像信号のサイズを変更するサイズ変更工程とを有する撮像方法をコンピュータに実行させることを特徴としている。
また、本発明のコンピュータプログラムのその他の特徴とするところは、撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、インタレース走査の映像信号を出力する撮像工程と、前記撮像工程から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換工程と、前記変換工程から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程と、前記歪み補正処理工程から出力された映像信号のサイズを変更するサイズ変更工程とを有する撮像方法をコンピュータに実行させることを特徴としている。
また、本発明の他の特徴によれば、歪み補正処理を行った映像信号に対して拡大縮小処理を行うようにすることができ、情報量が多い状態で歪み補正処理を行うことが可能となり、歪み補正処理を高精度に行うことができる。
また、本発明のその他の特徴によれば、プログレッシブ走査の映像信号に対して歪み補正処理を行うことによって、垂直方向の情報量が倍の状態で歪み補正処理を行うことができ、歪み補正処理の精度を向上することができる。また、リサイズ処理の前に歪み補正処理を行うようにしたので、情報量が多い状態で歪み補正処理を行うことができ、歪み補正処理の精度を向上することができ、これらにより、ひずみが無くて高画質なサイズ変更映像信号を出力することができる。
図4は、本発明を適用した撮像装置の構成例を示すブロック図である。
図4において、101は後述の如く被写体像を撮影して映像信号を出力する撮像部、102は撮像部101から得られた映像信号に対して符号化処理などを施す記録信号処理部、103は記録信号処理部102から出力された映像信号を記録媒体104に記録する記録部である。記録媒体104としては、メモリカードやディスク媒体などを用いることができる。
図1は、撮像部101の構成例を示すブロック図である。
図1に示したように、本実施の形態の撮像部101では、撮像レンズ1を通して電荷結合素子(CCD)2に結像し、CCD2で光電変換したインタレース走査の映像信号を、アナログ−デジタル変換器(以下、A/D変換器)3でAD変換を行う。
すなわち、インタレース走査の現映像信号S1を1フィールド遅延させるためのフィールドメモリ5aを使用し、入力されたインタレース走査の現映像信号S1を1フィールド遅延させた1フィールド遅延信号S2を生成する。
すなわち、CCD2に結像した画像の座標、ズーム倍率に対する補正処理係数を予めRAM等の記録媒体に記録しておく。そして、入力されたプログレッシブ走査の映像信号S4に対してこの補正処理係数を使用して2次元フィルタ処理を行い、歪み補正を行ったプログレッシブ走査の映像信号が作成される。この歪み補正後のプログレッシブ走査の映像信号のラインを間引き処理を行い、高画質なインタレース走査の映像信号S5を出力することにより、歪み補正の無い高画質な映像を得ることができる。
次に、撮像部101の第2の実施の形態を説明する。
図2は、第2の実施の形態を示し、撮像部101の構成例を示すブロック図である。図2に示したように、本実施の形態では、撮像レンズ1を通して電荷結合素子CCD2に結像し、CCD2で光電変換したインタレース走査の映像信号を、A/D変換器3でAD変換を行う。
CCD2に結像した画像の座標、ズーム倍率に対する補正処理係数を予めRAM等の記録手段に記録しておく。そして、入力されたインタレース走査の現映像信号S1に対してこの補正処理係数を使用して2次元フィルタ処理を行い、歪み補正処理後の映像信号S6を出力する。
次に、撮像部101の第3の実施を説明する。
図3は、第3の実施の形態を示し、撮像部101の構成例を示すブロック図である。図3に示したように、この第3の実施の形態では、撮像レンズ1を通して電荷結合素子CCD2に結像し、CCD2で光電変換したインタレース走査の映像信号を、A/D変換器3でAD変換を行う。
すなわち、インタレース走査の現映像信号S1を1フィールド遅延させるためのフィールドメモリ5aを使用し、入力されたインタレース走査の現映像信号S1を1フィールド遅延させた1フィールド遅延信号S2を生成する。
(第1の撮像方法例)
図5は、本発明の第1の撮像方法例を示すフローチャートである。
図5に示したように、本実施の形態の撮像方法は、ステップS51において被写体を撮影して被写体像をCCD2に結像する。
次に、ステップS53に進み、デジタルの映像信号にカメラ信号処理を施す。
次に、図6のフローチャートを参照しながら第2の撮像方法例を説明する。
図6に示したように、本実施の形態の撮像方法は、ステップS61において被写体を撮影して被写体像をCCD2に結像する。
次に、ステップS63に進み、デジタルの映像信号にカメラ信号処理を施す。カメラ信号処理の詳細は前述したので省略する。
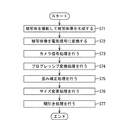
図7に示したように、本実施の形態の撮像方法は、ステップS71において被写体を撮影して被写体像をCCD2に結像する。
次に、ステップS73に進み、デジタルの映像信号にカメラ信号処理を施す。
第3の撮像方法例のように、プログレッシブ走査の映像信号に対して歪み補正処理を行うことによって、垂直方向の情報量が倍の状態で歪み補正処理を行うことができ、歪み補正処理の精度を向上することができる。さらに、リサイズ処理の前に歪み補正処理を行うことにより、情報量が多い状態で歪み補正処理を行うことができ、歪み補正処理の精度を向上することができ、高画質な歪み補正処理を行ったサイズ変更後の映像信号を得ることができる。
上述した本発明の実施の形態における撮像装置を構成する各手段、並びに撮像方法の各ステップは、コンピュータのRAMやROMなどに記憶されたプログラムが動作することによって実現できる。このプログラム及び上記プログラムを記録したコンピュータ読み取り可能な記憶媒体は本発明に含まれる。
プログラムを供給するための記録媒体としては、例えば、フロッピー(登録商標)ディスク、ハードディスク、光ディスク、光磁気ディスク、MO、CD−ROM、CD−R、CD−RW、磁気テープ、不揮発性のメモリカード、ROM、DVD(DVD−ROM,DVD−R)などがある。
2 CCD
3 A/D変換回路
4 カメラ信号処理回路
5 プログレッシブ変換処理回路
5a フィールドメモリ
5b 補間ライン信号作成回路
5c 合成回路
6 歪み補正処理回路
7 間引き処理回路
8 リサイズ処理回路
S1 インタレース走査の現映像信号
S2 1フィールド遅延信号
S3 補間ライン信号
S4 プログレッシブ走査の映像信号
S5 高画質なの映像信号
S6 歪み補正処理後の映像信号
S7 リサイズ処理後の映像信号
S8 プログレッシブ走査の映像信号
S9 リサイズ後の高画質映像信号
Claims (10)
- 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを有し、インタレース走査の映像信号を出力する撮像手段と、
前記撮像手段から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換手段と、
前記変換手段から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理手段とを備えることを特徴とする撮像装置。 - 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを有し、映像信号を出力する撮像手段と、
前記撮像手段から出力された映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理手段と、
前記歪み補正処理手段から出力された映像信号のサイズを変更するサイズ変更手段とを備えることを特徴とする撮像装置。 - 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを有し、インタレース走査の映像信号を出力する撮像手段と、
前記撮像手段から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換手段と、
前記変換手段から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理手段と、
前記歪み補正処理手段から出力された映像信号のサイズを変更するサイズ変更手段とを備えることを特徴とする撮像装置。 - 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、インタレース走査の映像信号を出力する撮像工程と、
前記撮像工程から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換工程と、
前記変換工程から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程とを有することを特徴とする撮像方法。 - 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、映像信号を出力する撮像工程と、
前記撮像工程から出力された映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程と、
前記歪み補正処理工程から出力された映像信号のサイズを変更するサイズ変更工程とを有することを特徴とする撮像方法。 - 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、インタレース走査の映像信号を出力する撮像工程と、
前記撮像工程から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換工程と、
前記変換工程から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程と、
前記歪み補正処理工程から出力された映像信号のサイズを変更するサイズ変更工程とを有することを特徴とする撮像方法。 - 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、インタレース走査の映像信号を出力する撮像工程と、
前記撮像工程から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換工程と、
前記変換工程から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程とを有する撮像方法をコンピュータに実行させることを特徴とするコンピュータプログラム。 - 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、映像信号を出力する撮像工程と、
前記撮像工程から出力された映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程と、
前記歪み補正処理工程から出力された映像信号のサイズを変更するサイズ変更工程とを有する撮像方法をコンピュータに実行させることを特徴とするコンピュータプログラム。 - 撮像レンズと、前記撮像レンズにより結像された被写体像を電気信号に変換する撮像素子とを用い、インタレース走査の映像信号を出力する撮像工程と、
前記撮像工程から出力されたインタレース走査の映像信号をプログレッシブ走査の映像信号に変換する変換工程と、
前記変換工程から出力されたプログレッシブ走査の映像信号に対し、前記撮像レンズによる幾何学的歪みを補正する歪み補正処理を施す歪み補正処理工程と、
前記歪み補正処理工程から出力された映像信号のサイズを変更するサイズ変更工程とを有する撮像方法をコンピュータに実行させることを特徴とするコンピュータプログラム。 - 前記請求項7〜9の何れか1項に記載のコンピュータプログラムを記録したことを特徴とするコンピュータ読み取り可能な記録媒体。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004314527A JP2006129069A (ja) | 2004-10-28 | 2004-10-28 | 撮像装置及び撮像方法 |
| US11/251,294 US7636111B2 (en) | 2004-10-28 | 2005-10-14 | Image capturing device having a distortion-reduction unit configured to reduce geometrical distortion caused by an imaging lens in an image progressive signal |
| CN200510116080.8A CN1767590A (zh) | 2004-10-28 | 2005-10-28 | 图像捕获设备 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004314527A JP2006129069A (ja) | 2004-10-28 | 2004-10-28 | 撮像装置及び撮像方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006129069A true JP2006129069A (ja) | 2006-05-18 |
| JP2006129069A5 JP2006129069A5 (ja) | 2009-04-02 |
Family
ID=36261337
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004314527A Pending JP2006129069A (ja) | 2004-10-28 | 2004-10-28 | 撮像装置及び撮像方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US7636111B2 (ja) |
| JP (1) | JP2006129069A (ja) |
| CN (1) | CN1767590A (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7612805B2 (en) | 2006-07-11 | 2009-11-03 | Neal Solomon | Digital imaging system and methods for selective image filtration |
| CN101483726B (zh) * | 2008-01-07 | 2011-05-04 | 华晶科技股份有限公司 | 交错式扫描影像处理方法 |
| US10440288B2 (en) | 2015-09-02 | 2019-10-08 | Microsoft Technology Licensing, Llc | Methods and apparatuses for capturing image frames with interlaced exposure |
| CN111147786B (zh) * | 2019-12-20 | 2021-07-02 | 杭州当虹科技股份有限公司 | 一种基于自适应interlace算法的场视频转换方法 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01114159A (ja) | 1987-10-27 | 1989-05-02 | Sanyo Electric Co Ltd | 中間調画像処理方法 |
| JPH02252375A (ja) | 1989-03-27 | 1990-10-11 | Canon Inc | 固体撮像カメラ |
| US5164831A (en) * | 1990-03-15 | 1992-11-17 | Eastman Kodak Company | Electronic still camera providing multi-format storage of full and reduced resolution images |
| JPH0423575A (ja) | 1990-05-18 | 1992-01-27 | Hitachi Ltd | カメラの撮影方式 |
| US5905530A (en) * | 1992-08-24 | 1999-05-18 | Canon Kabushiki Kaisha | Image pickup apparatus |
| JP3035416B2 (ja) | 1992-11-18 | 2000-04-24 | キヤノン株式会社 | 撮像装置及び画像再生装置及び映像システム |
| JP2962083B2 (ja) * | 1993-01-22 | 1999-10-12 | 松下電器産業株式会社 | 解像度変換方法、解像度変換装置、画像符号化装置、画像復号化装置 |
| US5886745A (en) * | 1994-12-09 | 1999-03-23 | Matsushita Electric Industrial Co., Ltd. | Progressive scanning conversion apparatus |
| US5610661A (en) * | 1995-05-19 | 1997-03-11 | Thomson Multimedia S.A. | Automatic image scanning format converter with seamless switching |
| US6806903B1 (en) * | 1997-01-27 | 2004-10-19 | Minolta Co., Ltd. | Image capturing apparatus having a γ-characteristic corrector and/or image geometric distortion correction |
| JPH10327393A (ja) * | 1997-05-23 | 1998-12-08 | Toshiba Corp | 映像信号処理装置 |
| US6995794B2 (en) * | 1999-06-30 | 2006-02-07 | Logitech Europe S.A. | Video camera with major functions implemented in host software |
| US6836289B2 (en) * | 1999-12-20 | 2004-12-28 | Texas Instruments Incorporated | Digital still camera architecture with red and blue interpolation using green as weighting factors |
| US6473460B1 (en) * | 2000-03-31 | 2002-10-29 | Matsushita Electric Industrial Co., Ltd. | Method and apparatus for calculating motion vectors |
| US6545719B1 (en) * | 2000-03-31 | 2003-04-08 | Matsushita Electric Industrial Co., Ltd. | Apparatus and method for concealing interpolation artifacts in a video interlaced to progressive scan converter |
| US6717622B2 (en) * | 2001-03-30 | 2004-04-06 | Koninklijke Philips Electronics N.V. | System and method for scalable resolution enhancement of a video image |
| JP3715249B2 (ja) * | 2001-04-27 | 2005-11-09 | シャープ株式会社 | 画像処理回路、画像表示装置、並びに画像処理方法 |
| JP2003125278A (ja) | 2001-10-15 | 2003-04-25 | Matsushita Electric Ind Co Ltd | 撮像装置 |
| JP2003348446A (ja) * | 2002-05-27 | 2003-12-05 | Matsushita Electric Ind Co Ltd | 映像信号処理装置 |
| JP4214781B2 (ja) | 2003-01-17 | 2009-01-28 | ソニー株式会社 | 撮像装置および方法、記録媒体、並びにプログラム |
| JP2004260265A (ja) | 2003-02-24 | 2004-09-16 | Nikon Corp | 画素の折り返し機能を有する画素抽出回路、および撮像装置 |
| JP4236489B2 (ja) * | 2003-03-14 | 2009-03-11 | 三洋電機株式会社 | 画像処理装置 |
| KR100850710B1 (ko) * | 2003-08-04 | 2008-08-06 | 삼성전자주식회사 | 위상 정정 필드를 이용한 적응적 디-인터레이싱 방법 및그 장치와, 이를 구현하기 위한 프로그램이 기록된 기록매체 |
| JP4165361B2 (ja) * | 2003-10-07 | 2008-10-15 | ソニー株式会社 | 画像撮影装置、画像処理装置及びレンズ色収差補正方法 |
| US7580457B2 (en) * | 2003-10-23 | 2009-08-25 | Broadcom Corporation | Unified system for progressive and interlaced video transmission |
-
2004
- 2004-10-28 JP JP2004314527A patent/JP2006129069A/ja active Pending
-
2005
- 2005-10-14 US US11/251,294 patent/US7636111B2/en not_active Expired - Fee Related
- 2005-10-28 CN CN200510116080.8A patent/CN1767590A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US7636111B2 (en) | 2009-12-22 |
| US20060092309A1 (en) | 2006-05-04 |
| CN1767590A (zh) | 2006-05-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4446193B2 (ja) | 画像処理装置および方法、並びにプログラム | |
| US8081225B2 (en) | Image processing apparatus and method, recording medium, and program | |
| JP4154661B2 (ja) | 画像処理装置および方法、記録媒体、並びにプログラム | |
| JP4742242B2 (ja) | 撮像装置及びそのプログラム | |
| EP2161928A1 (en) | Image processing device, image processing method, and program | |
| JP2010268441A (ja) | 画像処理装置、撮像装置及び画像再生装置 | |
| US10033931B2 (en) | Image processing apparatus and image processing method for processing still image data | |
| JP2010088105A (ja) | 撮像装置および方法、並びにプログラム | |
| RU2432614C2 (ru) | Устройство обработки изображения, способ обработки изображения и программа | |
| JPWO2008150017A1 (ja) | 信号処理方法および信号処理装置 | |
| JP4919836B2 (ja) | 画像の歪曲補正を行う画像処理装置、撮像装置及び画像の歪曲補正方法 | |
| JP4549260B2 (ja) | 記録再生装置、記録再生方法、及びコンピュータプログラム | |
| WO2010092835A1 (ja) | 画像処理装置、撮像装置、画像処理方法、画像処理プログラムおよび記録媒体 | |
| JP2013165488A (ja) | 画像処理装置、撮像装置、およびプログラム | |
| JP6037224B2 (ja) | 画像処理装置、撮像装置、およびプログラム | |
| JP6802848B2 (ja) | 画像処理装置、撮像システム、画像処理方法および画像処理プログラム | |
| JP2013020528A (ja) | 画像処理装置および方法、並びにプログラム | |
| JP2006129069A (ja) | 撮像装置及び撮像方法 | |
| JP2009237650A (ja) | 画像処理装置及び撮像装置 | |
| JP2009064225A (ja) | 画像処理装置及び画像処理方法 | |
| JP5267279B2 (ja) | 画像合成装置及びプログラム | |
| JP2023179473A (ja) | 撮像素子、撮像装置、撮像素子の作動方法、及びプログラム | |
| JP2010041497A (ja) | 画像処理装置、電子機器及び画像処理方法 | |
| JP4244218B2 (ja) | 撮像信号処理回路およびカメラシステム | |
| JP5332668B2 (ja) | 撮像装置および被写体検出プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071026 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20071026 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090213 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090522 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090526 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090715 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090901 |