JP2006033374A - 撮像装置の支持装置 - Google Patents
撮像装置の支持装置 Download PDFInfo
- Publication number
- JP2006033374A JP2006033374A JP2004208796A JP2004208796A JP2006033374A JP 2006033374 A JP2006033374 A JP 2006033374A JP 2004208796 A JP2004208796 A JP 2004208796A JP 2004208796 A JP2004208796 A JP 2004208796A JP 2006033374 A JP2006033374 A JP 2006033374A
- Authority
- JP
- Japan
- Prior art keywords
- camera
- electric
- pan
- light
- head
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images































Landscapes
- Studio Devices (AREA)
Abstract
【課題】 カメラに装着した状態で持ち運び易い支持装置を提供する。
【解決手段】 脚部材と、脚部材に対して第1の軸回りで回動可能な第1の部材と、第1の部材に対して第1の軸に略直交する第2の軸回りで回動可能であり、かつ撮像装置を保持する第2の部材と、第1および第2の部材をそれぞれ回動させる第1および第2のモータとを有する。第1の軸と第2の軸とが実質的に同一面内に配置され、かつ第1のモータの出力軸および第2のモータの出力軸がそれぞれ、実質的に第1の軸上および第2の軸上に配置されている。
【選択図】 図1
【解決手段】 脚部材と、脚部材に対して第1の軸回りで回動可能な第1の部材と、第1の部材に対して第1の軸に略直交する第2の軸回りで回動可能であり、かつ撮像装置を保持する第2の部材と、第1および第2の部材をそれぞれ回動させる第1および第2のモータとを有する。第1の軸と第2の軸とが実質的に同一面内に配置され、かつ第1のモータの出力軸および第2のモータの出力軸がそれぞれ、実質的に第1の軸上および第2の軸上に配置されている。
【選択図】 図1
Description
本発明は、撮像装置を支持し、撮像装置の向きを変更可能な支持装置に関するものである。
携帯可能なカメラに用いられる電動雲台として、図31に示すものがある(例えば、特許文献1参照)。
図31に示す電動雲台101において、カメラの底面と三脚ネジ101eで結合される雲台テーブル101bはカメラの底面形状とほぼ等しい大きさにまとめられている。電動雲台101では、チルトユニット101aが軸Lに対して傾くことにより、カメラをチルト方向に動作させる。また、パンニングユニット101cが固定ユニット101dに対して、軸101d1回りに回動することで、カメラをパン方向に動作させる。
最近では、フィルムの代わりに撮像素子を用いたデジタルカメラが普及しており、撮影画面のサイズはフィルムに比べて自由に設定できるとともに、撮像素子の画素数や画素配列も自由に設定できるため、撮影光学系を小型化でき、カメラを薄型化することができる。例えば、図32に示すように、撮影画面を色別に分解することで、撮影光学系の焦点距離を短くし、カメラ全体を薄型化したものがある。この薄型のカメラ100では、横方向(図32(B)の左右方向)の長さが85.6mm、縦方向(図32(B)の上下方向)の長さが54.0mm、厚み(図32(A)、(C)の左右方向の長さ)が3.3mmとなっている。
特開2000-39667号公報(段落番号0030〜0036、図1等)
特開2001−264854号公報(段落番号0032、0038〜0041、図2、3、5等)
しかしながら、図32に示すカメラ100を、図31に示す電動雲台101に装着した場合には、以下に説明する不具合が生じる。
電動雲台101にカメラ100を装着した場合には、図33に示すように、カメラ100の厚み方向T1と電動雲台101の厚み方向T2が略直交しているため、カメラ100及び電動雲台101それぞれの薄型化によるメリットが得られない。すなわち、電動雲台101をカメラ100に装着した場合には、カメラ100の厚み方向T1において電動雲台101が突出してしまい、電動雲台101及びカメラ100の全体としては大型化してしまう。したがって、電動雲台101をカメラ100に装着した状態では、携帯しにくくなってしまう。
なお、カメラ及び電動雲台を別々に携帯すれば、上述した不具合は生じないが、この場合には電動雲台を使用するたびに電動雲台をカメラに装着しなければならず、使い勝手が悪くなってしまう。
そこで本発明の目的は、カメラに装着した状態でも携帯性に優れた支持装置を提供することにある。
本発明である撮像装置の支持装置は、脚部材と、前記脚部材に対して第1の軸回りで回動可能な第1の部材と、前記第1の部材に対して前記第1の軸に略直交する第2の軸回りで回動可能であり、かつ撮像装置を保持する第2の部材と、前記第1および第2の部材をそれぞれ回動させる第1および第2のモータとを有し、前記第1の軸と前記第2の軸とが実質的に同一面内に配置され、かつ前記第1のモータの出力軸および前記第2のモータの出力軸がそれぞれ、実質的に前記第1の軸上および第2の軸上に配置されていることを特徴とする。
本発明によれば、第1の軸と第2の軸とを実質的に同一面内に配置し、かつ第1のモータの出力軸および第2のモータの出力軸をそれぞれ、実質的に第1の軸上および第2の軸上に配置することで、携帯しやすい状態で第2の部材を介して撮像装置を保持することができる。
以下、本発明の実施例について説明する。
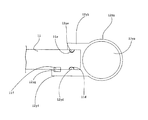
本発明の実施例1である電動雲台(支持装置)について図面を用いながら説明する。図1は、本実施例の電動雲台を薄型カメラ(以下、カメラと称する)に装着したときの正面図である。ここで、電動雲台が装着されるカメラとして、例えば、図32に示すようなカメラを用いることができる。
図1において、カメラ11の前面には、撮影レンズ11aおよびファインダ窓部11bが設けられている。
カメラ11の側縁部11cにおける一部の領域には、電動雲台12のパンモータハウジング(第1の部材)12yaが着脱可能に取り付けられている。パンモータハウジング12yaは、カメラ11を、軸(第1の軸)17yを中心に回動させることができる。
ここで、図1に示すように、パンモータハウジング12yaの長さは、カメラ11の縦方向(軸17yの長手方向)における長さ(第1の長さ)よりも短くなっている。また、後述するチルトモータハウジング(第2の部材)12paの長さは、カメラ11の横方向(軸17yと略直交する方向)における長さ(第2の長さ)よりも短くなっている。
さらに、図1に示すように電動雲台をカメラに装着した状態において、パンモータハウジング12yaはカメラ11の側面(図1の右側面)に沿って延びており、チルトモータハウジング12paはカメラ11の上面に沿って延びている。
尚、図1においてカメラ11の撮影画面の長手方向に沿う面であって、撮影者が撮影機器を把持し、上記長手方向を水平面に揃えて撮影するときの重力方向の上側を上面11g、下側を底面11hとし、カメラ11が被写体と対向する面を前面11i、前面11iと略平行な面を背面11j(図6参照)とする。
カメラ11の前面には、リモコン受光窓11fが配置されている。カメラ11内に設けられた受光センサ(不図示)は、リモコン撮影の際に、後述するリモコンから送信される光信号(リモコン信号)を、リモコン受光窓11fを介して受光する。そして、受光センサがリモコン信号を受光することで、カメラ11において撮影動作が開始される。
ここで、電動雲台12をカメラ11に装着した状態では、リモコン受光窓11fは、パンモータハウジング12yaの腕部12yfに覆われるようになっている。
すなわち、カメラ11に電動雲台12を装着していない場合には、カメラ11はリモコン受光窓11fを介してリモコン信号を受信できるようになっている。しかし、電動雲台12をカメラ11に装着した場合には、リモコン受光窓11fが腕部12yfによって覆われるため、リモコン受光窓11fを介してリモコン信号を受信することができなくなる。
図2に示すように、電動雲台12がカメラ11に装着された状態において、腕部12yfのうちリモコン受光窓11fと対向する面には、リモコン受光窓11fに対して光を照射する投光部12ygが設けられている。すなわち、カメラ11内の受光センサがリモコン受光窓11fを介して投光部12ygからの光を受光すると、カメラ11において撮影動作が開始されるようになっている。
このようにリモコン受光窓11fを腕部12yfで覆い、投光部12ygからの光を、リモコン受光窓11fを介して受光するように構成する理由について、以下に説明する。
すなわち、電動雲台12の動作が完了する前、すなわち、電動雲台12が装着されたカメラ11を特定の方向に向ける前に、リモコンから送信された信号がリモコン受光窓11fを介して受信され、カメラ11において誤って撮影が行われてしまうのを防止するためである。
後述するように、電動雲台12はリモコンからの指示を受けて動作する。そして、カメラ11の向きを特定の方向とさせる動作が完了したときに、投光部12ygからリモコン受光窓11fに対して撮影開始を指示する光信号が送信される。
このように構成することで、カメラ11に設けられたリモコン受光窓11fを利用することができ、カメラ11および電動雲台12間の通信を他の接続部材(例えば、ケーブル)を介して行う必要がなくなる。しかも、電動雲台12をカメラ11に装着するだけでよいため、電動雲台12の使い勝手を向上させることができる。
電動雲台12をカメラ11に装着させる際には、上述したように、パンモータハウジング12yaをカメラの側面部11cに取り付けることになるが、このとき、電動雲台12は、図2に示すように、パンモータハウジング12yaに形成された腕部12yf、12ybによってカメラ11を挟むようになっている。
図1及び図2において、カメラ11の前面には2つの凹部11dが形成され、カメラ11の背面には2つの凹部11eが形成されている。また、パンモータハウジング12yaの腕部12yf、12ybのうち互いに向かい合う面には、凸部12yd、12yeが形成されている。
パンモータハウジング12yaの凸部12yd、12yeを、カメラ11の凹部11d、11eに係合させることによって、電動雲台12をカメラ11に装着することができる。ここで、腕部12yf、12ybは、電動雲台12をカメラ11に装着する際に、弾性変形するようになっている。
一方、電動雲台12をカメラ11への装着方向とは反対方向にスライドさせれば、電動雲台12をカメラ11から取り外すことができる。このとき、腕部12yf、12ybが弾性変形することで、凸部12yd、12yeおよび凹部11d、11eの係合が外れる。
図1に示すように、パンモータハウジング12yaにはパン用受光窓12yhが設けられている。電動雲台12は、パン用受光窓12yhを介してリモコンから送信された光を受光し、該受光状態に応じて所定角度だけ軸17y回りに回動してカメラ11をパン方向で動作させる。この動作の詳細については、後述する。
パンモータハウジング12yaの内部には、図3に示すようにパンモータ(第1のモータ)13ya、基板13yb、遊星減速機構(第1の減速機構)13ycが設けられている。
図4および図5は、パンモータハウジング12yaの内部構造を示す分解斜視図である。ここで、図4はパンモータハウジング12yaの内部構造を一方向から見た図であり、図5はパンモータハウジング12yaの内部構造を他方向から見た図である。
図4、5において、遊星減速機構13ycは、パンモータ13yaの回転軸に圧入されるピニオンギヤ13yc1と、ハウジングを兼ねた内歯ギヤ13yc2と、ホルダ13yc3と、ホルダ蓋13yc4と、一対の段ギヤ13yc5と、出力内歯ギヤ13yc6と、蓋13yc7とにより構成されている。
ピニオンギヤ13yc1は段ギヤ13yc5の大径側のギヤ(大径ギヤ)と噛み合っているため、ピニオンギヤ13yc1の回転力が段ギヤ13yc5に伝達される。また、段ギヤ13yc5の大径ギヤは内歯ギヤ13yc2とも噛み合っているため、内歯ギヤ13yc2は段ギヤ13yc5の回転に応じて回転し、段ギヤ13yc5と係合するホルダ蓋13ycも回転する。
段ギヤ13yc5の小径側のギヤ(小径ギヤ)は内歯ギヤ13yc6と噛みあっているため、内歯ギヤ13yc6は段ギヤ13yc5の回転力を受けて回転する。
ここで、内歯ギヤ13yc2および内歯ギヤ13yc6の回転角の差は、段ギヤ13yc5の小径ギヤ及び大径ギヤの差(歯数の差)に基づいて決定される。
すなわち、段ギヤ13yc5の小径ギヤ及び大径ギヤの差を無くすと、内歯ギヤ13yc2及び内歯ギヤ13yc6の回転角の差は無くなる。この場合、段ギヤ13yc5は、ピニオン13yc1の回転力を受けて、ホルダ13yc3及びホルダ蓋13yc4とともに回転するだけとなり、回転出力は取り出せない。
一方、段ギヤ13yc5の小径ギヤ及び大径ギヤに僅かの差(所定の歯数以上の差)を設ければ、この差に応じて内歯ギヤ13yc2及び内歯ギヤ13yc6の回転角に差が生じることになる。このため、段ギヤ13yc5の小径ギヤ及び大径ギヤに僅かの差を設けることで、小型でありながら大きな減速比が得られる遊星減速機構13ycを構成することができる。
内歯ギヤ13yc6に一体的に形成された出力軸13yc8は、蓋13yc7を貫通して、チルトモータハウジング12paに連結されている。
このため、パンモータ13yaを駆動すると、固定子側(パンモータハウジング12ya)がチルトモータハウジング12paに対してパンモータ13yaの回転軸(図1に示す回転軸17y)を中心に回動する。
モータを用いた駆動機構では、一般的に固定子側を固定して回転子側を回転させるものであるが、本実施例では回転子側(内歯ギヤ13yc6の出力軸13yc8)をチルトモータハウジング12paに固定し、固定子側(パンモータハウジング12ya)がパンモータ13yaの回転に応じて回動するように構成されている。
モータの出力軸よりもモータハウジングの方が表面積が大きいため、固定子側をカメラに固定することで、電動雲台のカメラ装着部分における剛性が上がり、以下の利点が得られる。
基板13ybはパンモータ13yaに電気的及び機械的に接続されており、基板13ybには、電動雲台12の動作に関わる各種の回路が実装されている。このように、上記各種の回路を1つの基板にまとめて配置することで、電動雲台12の小型化を図ることが可能となる。
電動雲台の駆動制御を行うためには、カメラの回動(電動雲台の回動)に応じて受光窓12yhの向きを変える必要がある。ここで、パンモータ13yaの固定子側をチルトモータハウジング12paに固定した場合には、受光窓12yhに対して電動雲台内に配置される受光センサと基板13ybとを接続する配線を長くすることで、電動雲台の回転による配線のねじれを吸収しなくてはならない。このように配線を長くする場合には、受光センサの出力にノイズが含まれ易くなってしまう。
本実施例では、パンモータ13yaの固定子側(パンモータハウジング12ya)をカメラ11に装着するように構成している。また、パンモータハウジング12yaには、パン用受光窓12yhが設けられており、この内部にはリモコンからの光信号を受光するパン用受光センサが設けられている。
パン用受光センサがリモコンからの光信号を受光すると、電動雲台12内の制御回路は、パンモータ13yaを駆動することによって、パンモータハウジング12yaを軸17y回りに回動させる。
上述した構成では、基板13ybおよびパン用受光窓12yhを互いに近づけて配置でき、受光センサを基板13yb上に直接実装することができるため、電動雲台12の組み立てが容易になる。しかも、受光センサの配線が長くなることもないため、ノイズの発生を抑制することができる。
なお、チルトモータハウジング12pa内の構造は、上述したパンモータハウジング12ya内の構造と同じであるため、詳細な説明は省略する。
チルトモータハウジング12paの出力軸(内歯ギヤ13yc7の出力軸13yc8に相当する出力軸)は、ベース部材12baに固定されている。
このため、チルトモータハウジング12pa内のチルトモータ(第2のモータ、ピッチモータ13yaに相当する)を駆動すると、チルトモータハウジング12paは、ベース12baに対してチルトモータの出力軸(図1に示す、第2の軸としての回転軸17p)を中心に回動する。
チルトモータハウジング12paがベース部材12baに対して回転すると、チルトモータハウジング12paに連結されたパンモータハウジング12yaの位置が変化することになる。ここで、軸17y及び軸17pは、チルトモータハウジング12pa及びパンモータハウジング12yaの位置に拘わらず、実質的に同一面内に位置している。
一方、チルトモータハウジング12paには、チルト用受光窓12phが設けられており、チルト用受光窓12phに対してチルトモータハウジング12pa内にはリモコンからの光を受光するチルト用受光センサが設けられている。チルト用受光センサがリモコンからの光を受光すると、電動雲台12内の制御回路は、チルトモータを駆動することによって、チルトモータハウジング12paを軸17p回りに回動させる。
電動雲台12をカメラ11に装着した状態において、ベース部材12baは、図6に示すようにカメラ11の背面側(図6中右側)に突出している。そして、ベース部材12baの一端に設けられた回転部12bbには、クリップ部12bc及び受け部12bdが回転可能に取り付けられている。なお、ベース部材12ba、クリップ部12bc及び受け部21bdは、脚部材に相当する。
クリップ部12bcの先端は曲げ形成されている。そして、クリップ部12bc及び受け部12bdによって、例えば、シャツのポケットの縁やフェンスの網を挟むようにすれば、電動雲台12を上記ポケットやフェンスに取り付けることができる。これにより、カメラ11を、電動雲台12を介してポケットに取り付けた状態で撮影を行ったり、カメラ11を、電動雲台12を介してフェンスに取り付けた状態で撮影(例えば、撮影者を被写体として撮影するセルフ撮影)を行ったりすることができる。
図7は、本実施例の電動雲台の正面図であり、図1に示す状態からカメラ11を取り外したときの図である。図7に示すように、クリップ部12bcは二股に分かれており、各クリップ部12bc内には、チルトモータの電源となる2次電池16pと、パンモータの電源となる2次電池16yが収納されている。
受け部12bdの先端には、ヒンジ12beを介してピン12bgが取り付けられている。ヒンジ12beは、軸部12be1を介して受け部12bdに回転可能に支持されており、ヒンジ12beを回転させることで、受け部12bdに対するピン12bgの位置を変化させることができる。
すなわち、ヒンジ12beを軸部12be1回りに回転させることによって、ピン12bgを図7に示す状態にしたり、図8に示す状態にしたりすることができる。ここで、図8は、カメラ11に装着された電動雲台12の背面図である。図8に示す状態において、ピン12bgは、カメラ11の撮影光軸方向視において、カメラ11の底面部11hから突出するようになっている。
このため、電動雲台12が図8に示す状態にあるときには、ピン12beを地面などに差し込むことで、カメラ11を地面に対して倒立させることができる。この状態を図9に示す。
一方、図6に示す状態にあるクリップ部12bc及び受け部12bdをベース部材12baに対して回動させるとともに、チルトモータハウジング12paをベース部材12baに対して回動させると、電動雲台12を図10に示す状態にさせることができる。これにより、図10に示す状態にある電動雲台12(クリップ部12bc)を対象物(例えば、机)の上に置くことで、電動雲台12が装着されたカメラ11を対象物に対して倒立させることができる。
このとき、カメラ11は図11に示すように上下が逆になった状態となるが、この状態でも撮影を行うことは可能である。ここで、図11に示す状態では、ファインダ11bを覗き難くなるが、電動雲台12を使用する場合には撮影者がファインダ11bを覗くことはほとんど無いため、問題になることはない。
なお、本実施例では、カメラ11に対する電動雲台12の装着位置が特定されているが、カメラ11における複数の位置で電動雲台12を装着できるように構成すれば、電動雲台12を図11に示す状態で使用するときに、カメラ11の上下が逆になるのを避けることができる。
上述したように本実施例では、クリップ部12bc及び受け部12bdを用いて電動雲台12を対象物(固定物)に固定したり、ピン12bgを用いて電動雲台12を対象物に固定したり、クリップ部12bcを用いて電動雲台12を対象物上に載置したりすることができる。このように複数の使用方法を持つ電動雲台12をカメラ11に装着して使用することで、撮影環境に応じた撮影を行うことができる。
次に、本実施例の電動雲台12の回路構成について図12を用いて説明する。なお、図12には、電動雲台12に対して駆動信号を送信するリモコンの回路構成も示している。
図12において、パンモータの駆動を制御するための制御回路15yは、上述した基板13yb(図3参照)に実装されている。また、チルトモータの駆動を制御するための制御回路15pは、不図示の基板に実装されている。ここで、制御回路15y、15pの構成は同じであるため、以下の説明では主に制御回路15yの構成について説明する。
リモコン14は、発振部14a、駆動部14b及び投光部(LEDを含む)14cを有している。発振部14aは、演算増幅器、抵抗及びコンデンサで構成され、抵抗とコンデンサにより求まる時定数により所定の発振信号を出力する自励発振回路である。駆動部14bは、発振部14aからの発振信号に応じてLED14cを駆動する。
撮影者がリモコン14に設けられたスイッチ14d(図13参照)を操作すると、投光部14cからは所定の周波数で点滅する光が照射される。そして、投光部14cから照射された光は、電動雲台12内に設けられた受光センサ(SPD;Separate Photo Diode)15ya、15paで同時に受光される。
ここで、投光部14cから照射された光を所定の周波数に設定する理由は、投光部14cからの光と外光(投光部14cの照射光以外の光)とを区別させるためである。受光センサ15ya、15paでは、投光部14cからの光及び外光を受光することになるが、制御回路15y、15p内では、受光センサ15ya、15paの出力信号に対してフィルタ処理を行うことで、投光部14cの光と外光とを分離している。すなわち、フィルタ回路によって、受光センサ15ya、15paの出力信号に含まれる外光の成分を減衰している。
帯域透過差動増幅部15ybは、抵抗、コンデンサ及び演算増幅器で構成され、この時定数で決まる周波数のみ透過し、それ以外の周波数は減衰させる。すなわち、帯域透過差動増幅部15ybは、SPD15yaの出力信号のうちリモコンの発振周波数に応じた信号のみ透過させ、光の偏りを検出する。
また、帯域透過加算増幅部15ycは、抵抗、コンデンサ及び演算増幅器で構成されている。帯域透過加算増幅部15ycは、光量の総和を求めており、そこで求めた総和から抽出した投光の発振周波数によりFETなどで構成されるスイッチング部15ydをスイッチングし、帯域透過差動増幅部15ybの出力を同期検波する。
同期検波された信号は、平滑部15yeによって平滑化され、演算増幅器によって増幅される。ここで、平滑部15yeは、抵抗及びコンデンサの時定数で決まる周波数よりも高い周波数を減衰させるローパスフィルタである。
その後、抵抗とコンデンサで決まる時定数の位相進み補償を位相補償部15yfで行い、パンモータ駆動部15ygに信号を出力する。駆動部15yg内に設けられ、位相補償部15yfの出力信号を反転させる反転増幅部は、パンモータのコイル13ydに対して双方向から電流を与えるために設けられている。
リモコン14の投光部14c及びパン用受光窓12yhが互いに向かい合っている場合、投光部14cから照射された光のすべてがSPD15yaで受光され、SPD15yaから帯域透過加算増幅部15ycには、照射された光の総量に応じた信号が出力されることになる。
また、上記の場合には、SPD15yaで受光される光の偏りが無いため、すなわち、SPD15yaの各受光素子で受光される受光量の差が無いため、帯域透過差動増幅部15ybの出力はゼロとなる。したがって、モータ駆動部15ygにはパンモータを駆動させる信号が入力されず、パンモータは回転しない。
一方、リモコン14の投光部14c及びパン用受光窓12yhが互いに向かい合っていない場合には、SPD15yaで受光される光に偏りが生じるため、モータ駆動部15ygにはパンモータを駆動させる信号が出力される。これにより、パンモータが回転してパンモータハウジング12yaが軸17y回りに回動することになる。
ここで、SPD15yaで受光される光の偏りを少なくするようにパンモータを回転されば、SPD15yaがリモコン14の投光部14cと対向するようになり、SPD15yaが投光部14cと対向した時点でパンモータの駆動が停止する。
また、パンモータハウジング12yaが所定量よりも多く回動して、SPD15yaが投光部14cと対向する位置からずれた場合には、帯域透過差動増幅部15ybの出力は基準値よりもマイナスになるため、パンモータは自動的に逆回転することになる。これにより、SPD15ya及び投光部14cは互いに向かい合うようになる。
このようにSPD15yaで受光される光の偏りを無くし、帯域透過差動増幅部15ybの出力が常にゼロとなるようにモータを制御する方法をゼロメソッド制御法といい、位相補償部15yfは、モータ駆動部15yg及びSPD15yaの閉じたループを安定化させる役割を有している。
ゼロメソッド制御法を用いた場合には、受光センサとして、SPDのように受光される光の偏りしか検出できない安いセンサを用いることができるとともに、受光センサの感度が温度等で多少変化しても安定した制御を行うことができる。
上述したように本実施例の電動雲台12によれば、撮影者がリモコン14のスイッチ14dを操作しているだけで、リモコン14の投光部14cとSPD15ya、15paとが互いに向かい合うようにパンモータハウジング12yaやチルトモータハウジング12paが自動的に回動することになる。このため、撮影者が雲台を操作してカメラの向きを変える必要は無くなり、使い勝手の良いものとなる。
さらに、本実施例の電動雲台12には、パンモータハウジング12ya及びチルトモータハウジング12paの駆動が正しく行われたか否かを検出し、上記駆動が正しく行われたときにカメラ11に対して撮影動作の開始を指示する回路が搭載されている。以下、この回路構成について説明する。
図12において、帯域透過加算増幅部15ycの出力信号は、全波整流部15yhにて絶対値化されるとともに、ローパスフィルタで平滑化され、受光量の総和に応じたDC信号に変換される。
変換されたDC信号は比較部15yiに出力され、上記DC信号に応じた受光量の総和と予め設定された第1の所定値とが比較される。ここで、上記第1の所定値とは、十分なS/Nが得られる受光量の総和の下限値に相当する値である。すなわち、受光量の総和が第1の所定値よりも小さい場合には十分なS/N比が得られず、第1の所定値よりも大きい場合には十分なS/N比が得られることになる。
受光量の総和が第1の所定値よりも大きく、十分なS/Nが得られる場合には、比較部15yiから信号が出力され、FETなどで構成されるスイッチング部15ykがスイッチングされる。スイッチング部15ykには、比較部15yjの信号も入力される。
比較部15yjは比較部15yiと同様な構成になっており、比較部15yjには、SPD15yaで受光される光量の偏りを出力する平滑部15yeの信号が入力される。そして、比較部15yjは、平滑部15yeの出力(光量の偏りを示す出力)が第2の所定値以下の場合に、信号を出力するようになっている。
ここで、第2の所定値は、比較部15yiで用いられる第1の所定値とは異なり、リモコン14及びパン用受光窓12yhが概ね向かい合った状態であるときに、SPD15yaで受光される信号の偏り量を示す。このため、電動雲台12が駆動され、投光部14c及びSPD15yaが互いに向かい合った場合に、比較部15yiから信号が出力される。
上述したように、受光量の総和が十分であり(上記第1の所定値より大きく)、且つ電動雲台12のパンモータハウジング12yaがパン方向(軸17y回り)に回動して、パン用受光窓12yhがリモコン14の投光部14cと向かい合うことによって、受光量の偏りが概ね無くなった場合(上記第2の所定値以下の場合)に、スイッチング部15ykから信号が出力される。
上述したようにパン用受光窓12yhがリモコン14の投光部14cと向かい合っている場合には、SPD15yaで受光される光量の偏りは少なく、且つ受光量の総和が最も多くなる。
一方、パン用受光窓12yhがリモコン14の投光部14cと向かい合っていない場合には、SPD15yaで受光される光量の偏りが大きくなり、受光量総和も大きくなる。
また、投光部14cから照射された光の少なくとも一部が障害物によって遮られて、SPD15yaに到達しない場合には、SPD15yaで受光される光量の偏りが小さくなるとともに、受光量の総和も小さくなる。
したがって、パン用受光窓12yhおよびリモコン14の投光部14cが互いに向かい合い、且つ投光部14cから照射された光のほとんどがSPD15yaで受光された場合のみ、スイッチング部15ykから信号が出力されることになる。
チルトモータ13paの駆動制御を行う制御回路15pについても同様であり、受光量の総和が十分であり、且つ電動雲台12のチルトモータハウジング12paがチルト方向(軸17p回り)に回動して、チルト用受光窓12phがリモコン14の投光部14cと向かい合うことによって、受光量の偏りが概ね無くなった場合に、スイッチング部15pkから信号が出力される。
このようにスイッチング部15yk、15pkから信号が出力された場合には、パン用受光窓12ya(SPD15ya)及びチルト用受光窓12pa(SPD15pa)がリモコン14の投光部14cと向かい合っており、電動雲台12が装着されたカメラ11は被写体(リモコン14を持った撮影者)と向かい合っていることになる。
スイッチング部15yl及びスイッチング部15ykからの出力信号によって、スイッチング部15pkの出力信号がスイッチング部17bに入力される。すなわち、スイッチング部17bは、カメラ11が被写体(リモコンを持った撮影者)と向かい合った場合に、スイッチング部15ylによってスイッチングされる。ここで、スイッチング15ylの出力信号は、高い信頼性で電動雲台のパン方向及びチルト方向の駆動が完了したことを示す信号となる。
発振部17aは、リモコン14内の発振部14aと同様な構成の自励発振回路であり、駆動部17dは、発振部17aからの発振信号に応じてLED17cを駆動する。
ここで、駆動部17d及び発振部17aの間にはスイッチング部17bが設けられているため、スイッチング部17bがスイッチング(オン)されたときにのみLED17cが点滅駆動することになる。すなわち、カメラ11が被写体(リモコンを持った撮影者)と向かい合った場合にのみ、LED17cが点滅駆動する。
LED17cから照射された光は、図2に示す投光部12ygを介してカメラ11のリモコン受光窓11fに向かい、リモコン受光窓11f内の受光センサで受光される。そして、カメラ11内の制御回路は受光センサの出力を受けることによって、撮影動作を開始させる。すなわち、カメラ11が被写体(リモコンを持った撮影者)と向かい合った場合に、カメラ11において撮影動作が開始される。
上述したように、本実施例の電動雲台12をカメラ11に装着すれば、リモコン14を持つ撮影者はリモコン14のスイッチ14dを操作するだけで、カメラ11が電動雲台12の駆動によって撮影者側を向くようになり、且つ、カメラ11が撮影者側を向いた時点で撮影動作が開始されることになる。これにより、撮影者は電動雲台12が装着されたカメラ11を用いて容易に撮影を行うことができる。
本実施例の電動雲台12では、パン用受光部12yhがパンモータハウジング12yaに設けられ、チルト用受光部12phがチルトモータハウジング12paに設けられているが、本発明はこの構成に限るものではない。
例えば、図14に示すように、パンモータハウジング12ya1に、パン用受光窓12yh1(受光窓12yhに対応)及びパン用受光センサだけでなく、チルト用受光窓12ph1(受光窓12phに対応)及びチルト用受光センサを設けてもよい。また、チルトモータハウジングに、パン用受光窓およびチルト用受光窓(受光センサも含む)を設けてもよい。
図14に示すように、パンモータハウジング12ya1上にチルト用受光窓12ph1を設けた場合、チルト用受光窓12ph1内に設けられた受光センサの出力に基づいて、制御回路がチルトモータを駆動することにより、チルトモータハウジング12pa1が軸17p回りに回動することになる。
上述した構成では、図12を用いて説明した場合と同様に、チルト用受光窓12ph1がリモコン14の投光部14cと向かい合うようにチルトモータハウジング12pa1が回動する。このとき、チルト用受光窓12ph1内の受光センサ(図12のSPD15paに対応)で受光される受光量の偏りは小さくなっていき、この偏りが概ね無くなったときにチルトモータの駆動が停止する。これにより、電動雲台12が装着されたカメラ11は、チルト方向において、リモコン14を持つ撮影者と概ね向かい合った状態となる。
上述したようにパンモータハウジング12ya1にパン用受光窓12yh1及びチルト用受光窓12ph1を設ければ、これらの受光窓12yh1、12ph1の内部に配置される受光センサや受光センサに接続される回路基板等をまとめた状態でスペース効率良く配置することができる。これにより、電動雲台12の小型化を図ることが可能となる。
一方、図15に示すように、パンモータハウジング12ya2に2次元検出可能なセンサ18を配置し、このセンサ18をパン用及びチルト用の受光センサとして機能させることもできる。この場合には、1つのセンサ18を配置するだけでよいため、電動雲台12の小型化が可能となる。
図14及び図15に示す電動雲台の構成では、カメラ11への装着状態において、パンモータハウジング12ya1、12ya2がカメラ11に設けられたリモコン受光窓11fを覆っていない。
この場合には、リモコン14の投光部14cから照射された光が、リモコン受光窓11fを透過し、カメラ内部に配置された受光センサで受光されることになる。ここで、リモコン14の投光部14cの点滅周期を変えれば、電動雲台12を駆動させるための信号と、カメラ11で撮影動作を開始させるための信号とを区別させることができる。これにより、電動雲台12の駆動と、カメラ11での撮影動作を別々に行わせることができる。
具体的には、図16に示すように、リモコン140に、電動雲台12を駆動させるための光を照射する第1の投光部(LEDを含む)140aと、カメラ11で撮影動作を開始させるための光を照射する第2の投光部(LEDを含む)140fとを設ける。そして、第1及び第2の投光部140a、140fでの点滅周波数を互いに異なる値に設定する。
この場合、第2の投光部140fからの光がパン用受光窓12yh1及びチルト用受光窓12ph1に対応した受光センサで受光されることになるが、電動雲台12内の帯域透過回路(図12の帯域透過差動増幅部15yb及び帯域透過加算増幅部15ycを含む)において、第1及び第2の投光部140a、140fからの光信号を区別することができる。これにより、電動雲台12は、第1の投光部140aからの光信号だけに基づいて動作することができる。
電動雲台12の駆動によって、電動雲台12が装着されたカメラ11と、リモコン140の第1の投光部140aとが互いに向かい合うと、電動雲台12に設けられた照射窓19a(図14及び図15参照)内のLEDが点滅する。これにより、リモコン140を持った撮影者は、電動雲台12の駆動が完了したことを認識することができる。
すなわち、図14及び図15に示す電動雲台12には照射窓19aが設けられており、上記LEDの光が照射窓19aから外部に照射されるようになっている。
図1に示す電動雲台12では、図12に示すようにLED17cの光が投光部12ygを介して、カメラ11のリモコン受光窓11fに到達するように構成されている。一方、図14及び図15に示す電動雲台12では、LEDの光を、照射窓19aを介して被写体側に照射させるように構成されている。
なお、照射窓19aの内側(電動雲台12の内部)に設けられたLEDは、図12に示すLED17cに相当し、図12を用いて説明したように電動雲台12の駆動が完了した時点、すなわち、電動雲台12が装着されたカメラ11がリモコン140の第1の投光部140aと対向した時点で点滅するようになっている。ここで、図14及び図15に示す電動雲台12の回路構成は、上述した点が異なるだけであり、他の構成については図12に示す構成と同じである。
また、照射窓19aから照射されたLED光は、リモコン140の受光部140g内の受光センサで受光され、リモコン140に設けられた表示部(LEDを含む)140eが点灯するようになっている。これにより、リモコン140を持つ撮影者は、電動雲台12での駆動が完了したことを認識することができる。
そして、撮影者が、電動雲台12の駆動が完了したことを認識した後に、リモコン140に設けられたスイッチ140dを操作すると、第2の投光部140fが点滅する。ここで、第2の投光部140fから照射される光信号の周波数は、上述したように第1の投光部140aから照射される光信号の周波数とは異なっている。
第2の投光部140fから照射された光は、カメラ11のリモコン受光窓11fを介して、カメラ11内部の受光センサで受光される。カメラ11内の制御回路は、上記受光センサの出力に基づいて、撮影動作を開始させる。
ここで、電動雲台12の照射窓19aからのLED光をリモコン140の受光部140gで受光したときには、スイッチ140dの操作によって第2の投光部140fだけが点滅するように構成されている。具体的には、照射窓19aからのLED光が受光部140gで受光され、受光部140gから信号が出力されている間は、スイッチ140dの操作によって第2の投光部140fにのみ電力供給が行われる。
これにより、スイッチ140dの操作によってカメラ11での撮影動作を開始させるときに、第2の投光部140fとともに第1の投光部140aが点滅するのを防止することができる。そして、第1の投光部140aの点滅による無駄な電力消費を防止することができる。
また、照射窓19aからのLED光がリモコン140の受光部140gで受光されていないときには、スイッチ140dを操作しても、第1の投光部140aのみが点滅し、第2の投光部140fは点滅しないようになっている。具体的には、照射窓19aからのLED光が受光部140gで受光されておらず、受光部140gから信号が出力されていない間は、スイッチ140dの操作によって第1の投光部140aにのみ電力供給が行われる。
上述したように、受光部140gでの受光状態に応じて、スイッチ140dの操作による第1及び第2の投光部140a、140fの点滅制御を行うことで、1つのスイッチ140dの操作によって、電動雲台12の駆動指示とカメラ11における撮影動作の指示を容易に行うことができる。
上述した構成のリモコン140を用いれば、電動雲台12が装着されたカメラ11を被写体(リモコン140を持つ撮影者)と向かい合う状態とした後に、任意のタイミングでカメラ11に対して撮影動作を行わせることができる。
なお、リモコン140に、第1の投光部140aを点滅させるためのスイッチと、第2の投光部140fを点滅させるためのスイッチとを設けてもよい。
図17は、本発明の実施例2である電動雲台の回路構成を示す図である。本実施例において実施例1と異なる点は、電動雲台に駆動制御用のマイクロコンピュータ(以下、マイコンと称する)を搭載している点と、電動雲台の使用態様に応じて、電動雲台の駆動ストローク(パン方向およびチルト方向の回動量)を変更したり、撮影条件や画像処理方法を変更したりしている点である。
また、本実施例では、電動雲台がカメラに装着されていないときには電動雲台の駆動を禁止するようにしているとともに、パンモータ及びチルトモータを同時に駆動するのを禁止するようにしている。
図17において、チルト用の受光センサ202a(実施例1の図12に示すSPD15paに相当する)及びパン用の受光センサ202b(図12に示すSPD15yaに相当する)は、実施例1で説明した場合と同様に、リモコンから照射された光を受光する。ここで、リモコンとしては、実施例1で説明したリモコン14、140を用いることができる。
受光センサ202a、202bの出力信号はそれぞれ、チルト用及びパン用のバンドパスフィルタ203a、203bに入力され、所定の周波数(リモコンから送信される光信号の周波数)信号以外の信号が減衰される。
すなわち、受光センサ202a、202bはリモコンからの光(LED光)以外の光も受光するため、バンドパスフィルタ203a、203bにおいて、リモコンからの光以外の光に対応した信号が除去される。これにより、バンドパスフィルタ203a、203bの出力信号は、リモコンからの光に対応した信号となり、マイコン201に入力される。
マイコン201に入力された信号(アナログ信号)は、マイコン201内のA/D変換器によりデジタル信号に変換された後、マイコン201内において所定の演算処理に用いられる。なお、マイコン201の処理クロックは、リモコンから照射されるLED光の点滅周期と揃えてあるため、デジタル信号に変換された時点で検波信号になり整流されることになる。
マイコン201内で行われる上記所定の演算処理とは、実施例1において図12を用いて説明した処理をデジタル的に行うものであり、この処理として、例えば、実施例1の帯域透過差動増幅部15ybでSPDの信号の差分を求める処理、実施例1の帯域透過加算増幅部15ycで加算を行う処理、差分信号に対して公知の差分方程式などで位相進みフィルタをかける処理、フィルタ処理された信号をPWM信号に変換する処理がある。
PWM信号に変換された信号は、チルト用及びパン用の駆動回路204a、204b(実施例1の図12に示すモータ駆動部15pg、15ygに対応する)に出力され、これらの駆動回路204a、204bはチルトモータ205a及びパンモータ205bを駆動する。
ここで、チルトモータ205a及びパンモータ205bは、電動雲台内に設けられた1つの電源から電力供給を受けている。このように、チルトモータ205a及びパンモータ205bが1つの電源を共有することで、電動雲台内に各モータに対応した電源を設ける場合に比べて、電動雲台の小型化を図ることが可能となる。
例えば、実施例1で説明した図7において、モータ205a、205b等の駆動電圧を電池16pから供給するように構成するとともに、電池16yが配置されている領域内にマイコン201を配置することで、電動雲台の小型化を図ることができる。
また、上述した演算処理で求められた差分信号が所定値(実施例1で説明した第1の所定値)以下であり、且つ加算信号が所定値(実施例1で説明した第2の所定値)以上の場合には、マイコン201は電動雲台の駆動が完了したと判断して表示部(LEDを含む)206を駆動する。なお、表示部206は、実施例1の図14及び図15に示す照射窓19a及びこの内側に配置されたLEDに相当する。
これにより、表示部206からLED光が照射され、該LED光はリモコン140の受光部140gで受光される。そして、リモコン140の表示部140eが点灯することで、リモコン140を持つ撮影者に対して電動雲台の駆動が完了したことを知らせる。
また、本実施例の電動雲台には、該電動雲台が装着されたカメラに対して制御データを送信するデータ送信部(LEDを含む)207が設けられている。なお、データ送信部207は、実施例1の図2に示す投光部12yg及び図12に示すLED17cに相当し、マイコン201によって駆動が制御される。
本実施例の電動雲台がカメラに装着されている状態において、データ送信部207はカメラに設けられたリモコン受光窓(図2に示すリモコン受光窓11f)と対向する位置にある。
ここで、上述した制御データには、撮影開始指示に関するデータと、カメラに設けられた複数の測光エリアのうち各測光エリアでの測光評価の重み付け変更に関するデータと、撮影画像データを記憶するときの画像方向の変更に関するデータとが含まれている。
上記撮影開始指示に関するデータの送信は、電動雲台の駆動が完了した後、すなわち、電動雲台の装着されたカメラがリモコンを持つ撮影者と向かい合う状態となった後であって、リモコンから送信された撮影開始を指示する光信号を受光したときに行われる。リモコン受光窓を介して撮影開始指示に関するデータを受信したカメラは、撮影動作を開始することになる。この撮影開始指示に関するデータの送信方法は、実施例1で説明した場合と同様である。
また、上記測光評価の重み付け変更に関するデータや、画像方向の変更に関するデータは、電動雲台の駆動が完了した後であって、例えば、撮影開始指示に関するデータを送信する前に送信される。
角度検出ユニット23は、ベース部材12baに設けられた回転部12bbに対する、クリップ部12bc及び受け部12bdの回転角度を検出し、該検出結果をマイコン201に出力する。マイコン201は、角度検出ユニット23での検出結果に基づいて、電動雲台の使用状態を判別する。角度検出ユニット23は、具体的には図18に示すように、受け部12bdに設けられたスイッチ12biを有している。
受け部12bd及びクリップ部12bcが回転部12bbに対して図18に示す状態にあるとき、スイッチ12biはベース部材12baに形成された突出部12bhによって押し込まれることで、オン状態となる。
ここで、受け部12bd及びクリップ部12bcが図18に示す状態にあるとき、電動雲台は、実施例1で説明した図6又は図9に示す状態と同じ状態となっている。すなわち、電動雲台は、受け部12bd及びクリップ部12bcを用いて対象物に固定された状態(図6に示す状態に対応、以下、第1の支持状態)にあるか、受け部12bdに連結されたピンを用いて対象物に固定された状態にある(以下、第2の支持状態)。そして、第1又は第2の支持状態にある電動雲台が装着されたカメラは、通常の使用状態、すなわち、カメラの上面が空を向くようになっている。
一方、図18に示す状態にある受け部12bd及びクリップ部12bcを、図18中反時計回り方向に回動させると、図19に示す状態となる。これにより、スイッチ12biは、突出部12bhから離れ、突出部12bhによる押し込みが解除されることで、オフ状態となる。
ここで、本実施例の電動雲台が、実施例1で説明した図10に示す状態と同じ状態(以下、第3の支持状態)であるとき、スイッチ12biはオフ状態となる。電動雲台が第3の支持状態にあるとき、該電動雲台が装着されたカメラは、通常の使用状態とは逆の状態、すなわち、カメラの上面が地面を向くようになっている。
マイコン201は角度検出ユニット208の検出信号、すなわち、スイッチ12biのオン/オフ状態に基づいて、電動雲台が第1及び第2の支持状態にあるか、又は第3の支持状態にあるかを判別する。そして、電動雲台が第3の支持状態にあると判別したとき、マイコン201は、上述したようにデータ送信部207を介して、測光評価の重み付け変更に関するデータや画像方向の変更に関するデータをカメラに送信する。
これにより、カメラにおいて、各測光エリアにおける測光評価の重み付け(測光評価のアルゴリズム)が変更されることになる。
一般的には、カメラの上面が空側を向き、下面が地面側を向いた状態で撮影が行われるため、撮影画面内の上側に位置する測光エリアと、下側に位置する測光エリアとで、測光評価の重み付けが変更されている。すなわち、上述した一般的な撮影においては、撮影画面内の上側の領域における輝度は、下側の領域における輝度よりも高くなるため、この輝度差を考慮に入れて、測光エリアにおける測光評価の重み付けを変更している。
ここで、電動雲台が第3の支持状態にあるときには、カメラの上面が地面側を向き、下面が空側を向くようになっている。この場合、撮影画面内における測光エリアでの輝度も逆となるため、測光評価の重み付けを撮影画面の上下で逆にすることで、一般的な撮影における測光エリアでの測光評価と同じになるように設定する。
一方、カメラの上下が逆になった場合には、撮影画像も上下逆となるため、上述した画像方向の変更に関するデータを送信することで、撮影画像を記録する際に、撮影画像の上下を逆にした状態で記録することができる。これにより、記録された撮影画像を表示させたときに、表示画像は、一般的な撮影を行った場合と同様の画像(上下が逆ではない画像)となり、使用者は違和感無く撮影画像を確認することができる。
一方、マイコン201は、角度検出ユニット208の検出結果に基づいて、チルトモータ205a及びパンモータ205bの駆動量、すなわち、電動雲台のパン方向及びチルト方向における回動量を変更する。
ここで、クリップ部12bc及び受け部12bdを用いて電動雲台を衣服のポケットに固定した状態で、電動雲台を動作させる場合について説明する。
電動雲台がポケットに固定された状態において、電動雲台をパン方向又はチルト方向に自由に回動させると、電動雲台の装着されたカメラが周囲の対象物(ポケット)に衝突するおそれがある。すなわち、電動雲台が第1の支持状態にあるときには、カメラの背面側に位置する支持部12bd及びクリップ部12bcが、対象物に取り付けられており、電動雲台を大きく回動させると、カメラが背面側に位置する対象物に衝突してしまう。
本実施例では、電動雲台が第1の支持状態にあるときには、電動雲台の回動量を所定量に制限している。これにより、電動雲台が所定量よりも大きく回動することによって、電動雲台が装着されたカメラが周囲の対象物に衝突するのを避けることができる。
また、カメラマイコン21は、チルトモータ205a及びパンモータ205bを同時に駆動しないような制御を行っている。
ここで、チルトモータ205a及びパンモータ205bのそれぞれに対して、専用の電源が電動雲台内に設けられている場合には、各電源から各モータ205a、205bに対して電力供給を行うことができる。
しかし、本実施例のように、チルトモータ205a及びパンモータ205bが共通の電源を用いている場合において、チルトモータ205a及びパンモータ205bの駆動を同時に行う場合には、電源電圧が大幅に低下してしまうおそれがある。
本実施例において、リモコン140からの駆動指示を示す信号を受信すると、マイコン201は、まずパン駆動回路204bを介してパンモータ205bを駆動する。そして、パンモータ205bの駆動を完了した後に、チルト駆動回路204aを介してチルトモータ205aを駆動する。なお、チルトモータ205aを駆動した後に、パンモータ205bを駆動してもよい。
このように、チルトモータ205a及びパンモータ205bのうち一方のモータの駆動を完了した後に、他方のモータの駆動を行うことで、電源電圧が大幅に低下するのを抑制することができる。
一方、図20に示すようにパンモータハウジング12yaのうちカメラと接触する面には、三脚スイッチ209が設けられている。電動雲台(パンモータハウジング12ya)をカメラに正確に装着した場合、すなわち、パンモータハウジング12yaに形成された凸部12ye、12yhを、カメラに形成された凹部に係合させた場合には、三脚スイッチ209は、カメラに押し込まれることでオン状態となる。また、電動雲台をカメラから取り外した場合には、カメラによる三脚スイッチ209の押し込みが解除されることで、三脚スイッチ209はオフ状態となる。
ここで、三脚スイッチ209のオン/オフ信号は、マイコン201に出力される。そして、マイコン201は、三脚スイッチ209がオフ状態にあるときには、電動雲台(モータ205a、205b)の駆動を禁止している。
三脚スイッチ209がオフ状態にあるときには、電動雲台がカメラに装着されていないことになるため、電動雲台の駆動を行っても、カメラがリモコンを持つ撮影者の方向に向くことはない。そこで、本実施例のように電動雲台の駆動を禁止することで、電動雲台の無駄な駆動が行われるのを抑制することができる。
図21は、本実施例の電動雲台及びカメラの外観斜視図であり、電動雲台は第3の支持状態にある。
ここで、本実施例の電動雲台の外部構成は、実施例1の図11で説明した外部構成と概ね同じであるが、パンモータハウジング12yaに表示窓19aが形成されている点で実施例1(図11)と異なる。また、表示窓19aに対してパンモータハウジング12yaの内側には、LED(表示部206に相当する)が配置されている。
図21において、カメラ11の正面に設けられたリモコン受光窓は、パンモータハウジングによって覆われており、リモコン140から送信された光信号はリモコン受光窓に到達しないようになっている。
ここで、リモコン140からの光信号は、電動雲台に設けられたパン用受光窓12yh及びチルト用受光窓12phを透過し、受光窓12yh、12phの内側に配置された各受光センサで受光される。
電動雲台の装着されたカメラがリモコン140を持つ撮影者の方向に向くように電動雲台が動作し、該動作が完了すると、表示窓19aの内側に配置されたLEDが発光する。そして、該LEDからの光は、リモコン140の受光部140gで受光され、リモコン140の表示部140eが点灯する。このように表示窓19aでの点灯や、リモコン140の表示部140eでの点灯によって、撮影者は電動雲台の駆動が完了したことを認識することができる。
電動雲台の駆動が完了した場合には、実施例1で説明したように、投光部12ygからカメラ11(リモコン受光窓)に対して、撮影開始指示に関するデータが送信される。また、電動雲台が図21に示す状態にある場合には、カメラ11に対して、測光評価の重み付け変更に関するデータや画像方向の変更に関するデータが送信される。
このように電動雲台の駆動が完了した後に、電動雲台からカメラに対して撮影開始指示に関するデータを送信するようにすることで、カメラのリモコン受光窓11fに対して信号を送信するリモコン14に、専用周波数の発振回路やLEDを設ける必要が無くなる。
次に、本実施例の電動雲台の動作について、図22から図25に示すフローチャートを用いて説明する。本フローは、電動雲台に設けられたメインスイッチ(不図示)を操作して、電動雲台を起動させたときにスタートする。
ステップS1001において、マイコン201は、バンドパスフィルタ203a、203bを介して入力されたセンサ202a、202bの出力に基づいて、センサ202a、202bのうち少なくとも一方のセンサにおける受光量の総和が所定値以上であるか否かを判断する。ここで、受光量の総和が所定値以上である場合にはステップS1004に進む。一方、受光量の総和が所定値よりも小さい場合にはステップS1002に進む。
受光量の総和が所定値よりも小さい場合としては、リモコン140から電動雲台の駆動を指示する光信号が送信されていない場合(この場合には、受光量がゼロとなる)や、リモコン140から上記光信号が送信されているものの、リモコン140と電動雲台の間に位置する障害物によって光信号が遮られている場合などがある。
ステップS1002において、マイコン201は、ステップS1001で計測が開始されたタイマの計測時間が所定時間(例えば、4分)を経過したか否かを判別する。ここで、計測時間が所定時間を経過した場合にはステップS1003に進み、所定時間を経過していない場合にはステップS1001に戻る。
ステップS1003では、電動雲台のメイン電源をオフ状態にする。このように所定時間が経過しても受光量の総和が所定値以上とならない場合には、メイン電源をオフ状態とすることで、電動雲台の省電力化を図ることができる。
ステップS1004では、電動雲台内に設けられた電池の状態をチェックする。具体的には、電池が、電動雲台を駆動するのに十分な電力を有しているか否かを判別する。ここで、十分な電力を有している場合にはステップS1004に進み、そうでない場合にはステップS1006に進む。
ステップS1005では、三脚スイッチ209がオン状態になっているか否かを判別する。ここで、三脚スイッチ209がオン状態のときにはステップS1007に進み、オフ状態のときにはステップS1006に進む。
ステップS1006において、マイコン201は表示部206を駆動することによって、リモコン140に対して、電動雲台が駆動不能であることを示す信号を送信する。この信号を受けたリモコン140は、表示部140eを所定の周期(例えば、4Hz程度の表示としては速い周期)で所定時間(例えば、5秒間)、点滅させる。これにより、リモコン140を操作する撮影者に対して、電動雲台を駆動することができない旨の警告を行う。
ステップS1008では、メイン電源をオフ状態にする。このように電池の電力が不足している場合や、電動雲台がカメラに装着されていない場合に、警告表示を行うとともに、電動雲台の駆動を停止させることで、無駄なリモコン操作や電動雲台の無駄な駆動を抑制することができる。
ステップS1007において、マイコン201は、角度検出ユニット208の出力に基づいて、電動雲台が第1及び第2の支持状態にあるか、又は第3の支持状態にあるかを判別する。ここで、電動雲台が第1及び第2の支持状態にある場合にはステップS1010に進み、第3の支持状態にある場合にはステップS1009に進む。
ステップS1009では、データ送信部207を駆動することによって、カメラに対して、上述した測光評価の重み付け変更に関するデータや画像方向の変更に関するデータを送信する。すなわち、電動雲台が第3の支持状態にあるときには、カメラの上下が逆になっているため、上記データを送信することで、一般的な撮影を行う場合の撮影条件と同じ条件で撮影動作を行わせることができるとともに、表示される撮影画像を見やすいものとすることができる。
ステップS1010において、マイコン201は、パン用の受光センサ(SPD)202bで受光される光束の偏り(受光量の差)を検出する。すなわち、電動雲台に対してどの方向からリモコン信号が送信されているかを検出する。そして、パン用受光センサ202bで受光された光がプラス方向に偏っているか否か、すなわち、受光量の差が基準値(受光量の差がゼロ)に対してプラス側であるか否かを判別する。
ここで、受光量の差が基準値に対してプラス側にある場合には、電動雲台が装着されたカメラが、リモコンを持つ撮影者と向かい合う位置に対して、軸17y回りの一方向に傾いていることになる。また、光束がマイナス方向に偏っている場合には、電動雲台が装着されたカメラが、リモコンを持つ撮影者と向かい合う位置に対して、軸17y回りの他方向に傾いていることになる。
ステップS1010において、光束の偏りがプラス方向である場合にはステップS1011に進み、そうでない場合にはステップS1012に進む。
ステップS1011において、マイコン201は、プラス方向の光束の偏りが無くなるように、パン駆動回路204bを介してパンモータ205bを駆動する。すなわち、パンモータ205bの駆動によって、電動雲台のパンモータハウジングを軸17y回りの他方向に回動させる。これにより、プラス方向の光束の偏りが減少していく。
ステップS1013では、パンモータハウジングの回動量が検出され、検出された回動量が所定値を超えているか否かを判別する。
ここで、パンモータハウジングの回動量は、予め設定されたパンモータハウジングの回動速度とパンモータハウジングの駆動時間とに基づいて検出することができる。また、フォトインタラプタ及びパルス板をパンモータハウジングの駆動機構内に配置し、パルス数をカウントすることで回動量を検出することができる。さらに、パンモータ250bとして、ステッピングモータを用いた場合には、駆動パルス数をカウントすることで、回動量を求めることができる。
ステップS1013において、パンモータハウジングの回動量が所定量を超えている場合にはステップS1015に進み、超えていない場合にはステップS1017に進む。
一方、ステップS1012において、マイコン201は、マイナス方向の光束の偏りが無くなるように、パン駆動回路204bを介してパンモータ205bを駆動する。すなわち、パンモータ205bの駆動によって、電動雲台のパンモータハウジングを軸17y回りの一方向に回動させる。これにより、マイナス方向の光束の偏りが減少していく。
ステップS1014では、パンモータハウジングの回動量が検出され、検出された回動量が所定量を超えているか否かを判別する。ここで、回動量が所定量を超えている場合にはステップS1015に進み、超えていない場合にはステップS1017に進む。
ここで、上記所定量は、電動雲台(パンモータハウジング)のパン方向の回動量の上限値を示し、第1から第3の支持状態に応じて、適宜設定することができる。
電動雲台が第1の支持状態にある場合において、電動雲台をパン方向に大きく回動させると、カメラが周囲の障害物に衝突してしまうおそれがある。そこで、第1の支持状態にあるときには、電動雲台の駆動ストロークを制限するために、上記所定量を決定している。
一方、電動雲台が第3の支持状態にある場合には、第1の支持状態のように駆動ストロークを制限する必要がない。このため、第3の支持状態では、電動雲台がメカ的な回動範囲の端の直前で停止するように、上記所定量を設定している。
ここで、外乱などの影響によって電動雲台のパン方向における駆動位置(回動位置)がずれるおそれがあり、単に電動雲台の回動量だけを制限しただけでは、上記ずれに応じて電動雲台が予め設定した停止位置(上記所定量に基づいて決定される停止位置)を超えてしまうおそれがある。そこで、本実施例では、電動雲台にリセットスイッチが設けられており、電動雲台がパン方向における所定の位置(例えば、回動領域の中心位置)まで回動したときにリセットスイッチの出力状態が変化するようになっている。そして、出力状態が変化した時点から、例えば、駆動パルス数をカウントすることで、電動雲台の絶対位置を検出することができる。これにより、電動雲台が予め設定された停止位置を超えてしまうのを抑制することができる。
ステップS1015において、マイコン201は表示部206を駆動することによって、リモコン140に対して、電動雲台が駆動不能であることを示す信号を送信する。この信号を受けたリモコン140は、表示部140eを所定の周期(例えば、4Hz程度の表示としては速い周期)で所定時間(例えば、5秒間)、点滅させる。これにより、リモコン140を操作する撮影者に対して、電動雲台をパン方向に回動させることができない旨の警告を行う。そして、ステップS1016で、メイン電源をオフ状態にする。
ステップS1017では、パン方向における光束の偏りが所定の偏りよりも小さいか否かを判別する。ここで、上記所定の偏りとは、電動雲台が装着されたカメラが、リモコンを持つ撮影者と向かい合った状態であることを概ね許容できる程度の偏りである。
ここで、パン方向における光束の偏りが所定の偏りよりも小さい場合には、ステップS1018に進み、所定の偏りよりも大きい場合には、ステップS1010に戻る。
ステップS1010からステップS1017までの動作を繰り返すことによって、電動雲台が装着されたカメラは、パン方向においてリモコン140と向かい合うようになる。そして、ステップS1018において、パンモータ205bの駆動を停止させることにより、電動雲台のパン方向の駆動を完了させる。電動雲台のパン方向の駆動が完了すると、チルト方向の駆動を行うために、ステップS1019に進む。
ステップS1019において、マイコン201は、チルト用の受光センサ(SPD)202aで受光される光束の偏り(受光量の差)を検出する。すなわち、電動雲台に対してどの方向からリモコン信号が送信されているかを検出する。そして、光束がプラス方向に偏っているか否か、すなわち、受光量の差が基準値(受光量の差がゼロ)に対してプラス側であるか否かを判別する。
ここで、光束がプラス方向に偏っている場合には、電動雲台が装着されたカメラが、リモコンを持つ撮影者と向かい合う位置に対して、軸17p回りの一方向に傾いていることになる。また、光束がマイナス方向に偏っている場合には、電動雲台が装着されたカメラが、リモコンを持つ撮影者と向かい合う位置に対して、軸17p回りの他方向に傾いていることになる。
ステップS1019において、光束の偏りがプラス方向である場合にはステップS1020に進み、そうでない場合にはステップS1021に進む。
ステップS1020において、マイコン201は、プラス方向の光束の偏りが無くなるように、チルト駆動回路204aを介してチルトモータ205aを駆動する。すなわち、チルトモータ205aの駆動によって、電動雲台のパンモータハウジングが軸17p回りの他方向に回動し、プラス方向の光束の偏りが減少していく。
ステップS1022では、チルトモータハウジングの回動量が検出され、検出された回動量が所定値を超えているか否かを判別する。
ここで、チルトモータハウジングの回動量は、予め設定されたチルトモータハウジングの回動速度とチルトモータハウジングの駆動時間とに基づいて検出することができる。また、フォトインタラプタ及びパルス板をチルトモータハウジングの駆動機構内に配置し、パルス数をカウントすることで回動量を検出することができる。さらに、チルトモータ250aとして、ステッピングモータを用いた場合には、駆動パルス数をカウントすることで、回動量を求めることができる。
ステップS1022において、チルトモータハウジングの回動量が所定量を超えている場合にはステップS1024に進み、超えていない場合にはステップS1026に進む。
一方、ステップS1021において、マイコン201は、マイナス方向の光束の偏りが無くなるように、チルト駆動回路204aを介してチルトモータ205aを駆動する。すなわち、チルトモータ205aの駆動によって、電動雲台のチルトモータハウジングが軸17p回りの一方向に回動し、マイナス方向の光束の偏りが減少していく。
ステップS1023では、チルトモータハウジングの回動量が検出され、検出された回動量が所定量を超えているか否かを判別する。ここで、回動量が所定量を超えている場合にはステップS1024に進み、超えていない場合にはステップS1026に進む。
ここで、上記所定量は、電動雲台(チルトモータハウジング)のチルト方向における回動量の上限値を示しており、第1〜第3の支持状態に応じて適宜設定することができる。
電動雲台が第1の支持状態にある場合において、電動雲台をチルト方向に大きく回動させると、カメラが周囲の障害物に衝突してしまうおそれがある。そこで、第1の支持状態にあるときには、電動雲台の駆動ストロークを制限するために、上記所定量を決定している。
一方、電動雲台が第3の支持状態にある場合には、第1の支持状態のように駆動ストロークを制限する必要がない。このため、第3の支持状態では、電動雲台がメカ的な回動範囲の端の直前で停止するように、上記所定量を設定している。
ここで、外乱などの影響によって電動雲台のチルト方向における駆動位置(回動位置)がずれるおそれがあり、単に電動雲台の回動量だけを制限しただけでは、上記ずれに応じて電動雲台が予め設定した停止位置(上記所定量に基づいて決定される停止位置)を超えてしまうおそれがある。そこで、本実施例では、電動雲台にリセットスイッチが設けられており、電動雲台がチルト方向における所定の位置(例えば、回動領域の中心位置)まで回動したときにリセットスイッチの出力状態が変化するようになっている。そして、出力状態が変化した時点から、例えば、駆動パルス数をカウントすることで、電動雲台の絶対位置を検出することができる。これにより、電動雲台が予め設定された停止位置を超えてしまうのを抑制することができる。
ステップS1024において、マイコン201は表示部206を駆動することによって、リモコン140に対して、電動雲台が駆動不能であることを示す信号を送信する。この信号を受けたリモコン140は、表示部140eを所定の周期(例えば、4Hz程度の表示としては速い周期)で所定時間(例えば、5秒間)、点滅させる。これにより、リモコン140を操作する撮影者に対して、電動雲台をチルト方向に回動させることができない旨の警告を行う。そして、ステップS1025で、メイン電源をオフ状態にする。
ステップS1026では、チルト方向における光束の偏りが所定の偏りよりも小さいか否かを判別する。ここで、上記所定の偏りとは、電動雲台が装着されたカメラが、リモコンを持つ撮影者と向かい合った状態であることを概ね許容できる程度の偏りである。
ここで、チルト方向における光束の偏りが所定の偏りよりも小さい場合には、ステップS1027に進み、所定の偏りよりも大きい場合には、ステップS1019に戻る。
ステップS1019からステップS1026までの動作を繰り返すことによって、電動雲台が装着されたカメラは、チルト方向においてリモコン140と向かい合うようになる。
ステップS1010からステップS1026に示すように、本実施例では、パンモータ205b及びチルトモータ205aの同時駆動を禁止しているため、同時駆動に伴う電圧の大幅な低下を抑制することができる。
ステップS1027では、チルトモータ205aの駆動を停止させることにより、電動雲台のチルト方向の駆動を完了させる。電動雲台のチルト方向の駆動が完了すると、ステップS1028に進む。
ステップS1028では、チルトモータ205a及びパンモータ205bの駆動完了に対する信頼性を確認する。具体的には、パン用受光センサ202b及びチルト用受光センサ202aで受光されたリモコン信号の受光量の総和が所定量以上であり、且つ、受光量に大きな偏り(差)が無いか否かを確認する。
ここで、受光量の総和が所定量以上であり、且つ、受光量の偏りが概ねない場合には、チルトモータ205a及びパンモータ205bの駆動が正常に行われたと判断して、ステップS1029に進む。一方、モータ205a、205bの駆動が正常に行われていないと判断したときには、ステップS1029に進む。
ステップS1029において、マイコン201は表示部206を駆動することによって、リモコン140に対して、電動雲台が駆動不能であることを示す信号を送信する。この信号を受けたリモコン140は、表示部140eを所定の周期(例えば、4Hz程度の表示としては速い周期)で所定時間(例えば、5秒間)、点滅させる。これにより、リモコン140を操作する撮影者に対して、電動雲台の駆動が正常に行われていない旨の警告を行う。そして、ステップS1030で、メイン電源をオフ状態にする。
ステップS1031では、表示部206を介してリモコン140に駆動停止完了を示す信号を通信する。この信号を受けたリモコン140は、表示部140eを点灯させることによって、リモコン140を保持する撮影者に対して電動雲台の駆動が完了したことを知らせる。
ステップS1032において、マイコン201は、パン用受光センサ202b及びチルト用受光センサ202aの出力に基づいて、リモコン140から光の照射が行われているか否かを判別する。ここで、リモコン140からの光の照射が停止している場合には、ステップS1035に進む。また、継続して光の照射が行われている場合には、タイマのカウントを開始させて、ステップS1033に進む。
本実施例では、リモコン140のスイッチ140dを操作して第1の投光部140aを点滅させることで、電動雲台を駆動させる。これにより、電動雲台の装着されたカメラが、リモコン140を持つ撮影者が位置する方向を向くようになる。
そして、電動雲台の駆動完了を示す表示部140eの点灯を確認することでスイッチ140dの操作を止め、再びスイッチ140dを操作すると、第2の投光部140fが点滅する。これにより、カメラにおいて撮影動作が開始される。
すなわち、表示部140eが点灯した後も、継続してスイッチ140dを操作している場合には、リモコン140の第2の投光部140fが点滅しないようになっている。このように、電動雲台の駆動指示を行う場合(第1の投光部140aを点滅させる場合)と、撮影開始指示を行う場合(第2の投光部140fを点滅させる場合)とで、リモコン140のスイッチ140dを2回操作するように構成することで、電動雲台の駆動が完了した直後に撮影動作が開始されてしまうのを防止することができる。
これにより、撮影者は電動雲台の駆動が完了したことを確認した後に、所望のタイミングでスイッチ140dを操作することでカメラにおいて撮影動作を開始させることができる。
ステップS1033では、タイマのカウント時間が所定時間(例えば、2分)を経過しているか否かを判別し、所定時間を経過していなければステップS1032に戻る。また、所定時間を経過している場合には、ステップS1034に進み、電動雲台のメイン電源をオフ状態にする。
すなわち、電動雲台の駆動が完了した後においても継続してリモコン140のスイッチ140dが操作されているときには、電動雲台の駆動を停止させることによって、電動雲台での無駄な電力消費を抑制している。
ステップS1035において、マイコン201は、チルト用受光センサ202a及びパン用受光センサ202bの出力に基づいて、リモコン140のスイッチ140dが操作されたか否かを判別する。すなわち、リモコン140において再びリモコン信号が送信されているか否かを判別する。
ここで、リモコン信号を受信した場合にはステップS1038に進み、受信していない場合には、タイマのカウントを開始させて、ステップS1036に進む。
ステップS1034では、タイマでのカウント時間が所定時間(例えば、5分)を経過しているか否かを判別し、経過していない場合にはステップS1035に進み、経過している場合にはステップS1037に進む。ステップS1037では、電動雲台のメイン電源をオフ状態にする。このようにリモコン140が所定時間、操作されていない場合には、電動雲台のメイン電源をオフ状態とすることにより、電動雲台での無駄な電力消費を抑制することができる。
ステップS1038では、再びチルトモータ205a及びパンモータ205bの駆動完了に対する信頼性を確認する。具体的には、パン用受光センサ202b及びチルト用受光センサ202aで受光されたリモコン信号の受光量の総和が所定量以上であり、且つ、受光量に大きな偏りが無いか否かを確認する。
ここで、受光量の総和が所定量以上であり、且つ、受光量の偏りが概ねない場合には、チルトモータ205a及びパンモータ205bの駆動が正常に行われたと判断して、ステップS1039に進む。一方、モータ205a、205bの駆動が正常に行われていないと判断したときには、ステップS1010に戻る。
ステップS1038において、再び駆動完了の信頼性を確認するのは、リモコン140を持つ撮影者が別の位置に移動した場合に対応させるためである。すなわち、モータ205a、205bの駆動を完了した後であって、リモコン140を持つ撮影者が別の位置に移動した状態でリモコン140を操作した場合には、再びチルトモータ205a及びパンモータ205bの駆動制御を行うことによって、電動雲台が装着されたカメラを、リモコン140を持つ撮影者の方向に向かせる。
ステップS1038において、モータ205a、205bの駆動が正常に行われたと判断した場合、すなわち、電動雲台が装着されたカメラが、リモコン140を持つ撮影者と向かい合っていると判断した場合には、ステップS1039に進む。ステップS1039において、マイコン201は、データ送信部207を駆動することによって、カメラに対して撮影開始を指示する信号(光信号)を送信する。
この光信号は、カメラ11のリモコン受光窓11fを透過して、カメラ11内に配置された受光センサで受光される。そして、カメラ11は、撮影動作を開始することになる。
また、ステップS1039で撮影開始指示に関する信号を送信したときには、タイマの開始させる。そして、ステップS1040では、タイマのカウント時間が所定時間、例えば、カメラ11での最長撮影時間に対応した時間を経過したか否かを判別する。ここで、上記所定時間が経過していなければステップS1040で待機し、経過している場合にはステップS1010に戻る。
本発明の実施例3である支持装置について説明する。
上述した実施例1、2の電動雲台では、リモコンを持つ撮影者(被写体)が位置する方向にカメラを自動的に向けることができる。一方、本実施例の支持装置では、実施例1、2の電動雲台で配置された、リモコン信号に応じて動作する駆動機構(受光センサやモータ等を含む)が省略されている。
すなわち、本実施例の支持装置では、上記駆動機構を省略することによって、実施例1、2の電動雲台に比べて小型化及び軽量化を図っている。これにより、支持装置を持ち運び易くすることができる。
また、本実施例の支持装置においては、支持装置の装着されたカメラが被写体側を向くように、使用者が支持装置を操作する必要がある。ここで、撮影画角が大きい(広角)撮影レンズを備えたカメラを用いた場合には、撮影動作によって生成された画像が撮影開始前に決定された撮影構図に対して大きくずれることを抑制することができる。また、多少の構図ずれが生じた場合でも、撮影後の画像処理によって構図を揃えることができる。さらに、カメラの前面(被写体側を向く面)に鏡等の反射部材を配置すれば、撮影構図を容易に決定でき、構図ずれを抑制することができる。
以下、本実施例の支持装置について具体的に説明する。
支持装置31のクランプ31aには、図28に示すように、ベース部材31b(実施例1、2のベース部材12baに対応する)が回動可能に取り付けられている。クランプ31aの内側には、図27に示すように凸部31a1が形成されている。凸部31a1は、カメラ11に形成された凹部11kと係合する。これにより、支持装置31をカメラ11に装着することができる。
ここで、カメラ11の前面(撮影レンズが設けられた面)には、2つの凹部11kが設けられている。また、カメラ11の背面(前面と対向する面)にも、2つの凹部11kが設けられている。図27では、カメラ11の前面及び背面のそれぞれに形成された1つの凹部11kを示している。
一方、凸部31a1は、カメラ11の上面11gがクランプ31aの底面に当接した状態において、カメラ11の凹部11kと対向する位置に形成されている。
クランプ31aは弾性部材で構成されており、図27に示す状態にある支持装置31(クランプ31a)をカメラ11に対して一方向(図27の下方向)にスライドさせると、クランプ31aが弾性変形することによって、凸部31a1及び溝部11kの係合を外すことができる。
また、クランプ31aを弾性変形させながら凸部31a1を溝部11kに係合させることで、支持装置31をカメラ11に装着させることができる。このとき、クランプ31aの底面は、カメラ11の上面11gに当接し、クランプ31aのうち凸部31a1が形成された2つの面それぞれは、カメラ11の前面11i及び背面11jに当接する。
本実施例の支持装置31は、実施例1、2で説明した電動雲台と同様に、複数の支持状態の間で切り換わることができる。以下、具体的に説明する。
図28は、第1の支持状態にある支持装置の側面図である。図28に示すように、ベース部材31bには、回転部31cを介して受け部31d及びクリップ部31eが取り付けられている。ここで、受け部31d及びクリップ部31eは、ベース部材31bに対して一体的に回転可能となっている。
図28に示すように、受け部31d及びクリップ部31eによって対象物32(例えば、シャツの胸ポケットや看板)を挟めば、支持装置31を介してカメラ11を対象物32に固定することができる。
ここで、クランプ31aはベース部材31bに対して回動可能となっているため、クランプ31aをベース部材31bに対して回動させることによってカメラ11の向きを変更することができる。
図29は、第2の支持状態にある支持装置の側面図である。図29や図26に示すように、受け部31dには、ヒンジ31fを介してピン31fが連結されており、ヒンジ31fは受け部31dに対して回動可能に取り付けられている。
ここで、図28に示す状態からヒンジ31fを回転させると、ピン31fを突出させることができる。そして、突出したピン31gを対象物(例えば、地面)33に差し込めば、図29に示すように、支持装置31を介してカメラ11を対象物33に固定することができる。
第2の支持状態においても、第1の支持状態と同様にクランプ31aをベース部材31bに対して回動させれば、カメラ11の向きを変更することができる。
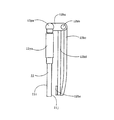
図30は、第3の支持状態にある支持装置の側面図である。第1又は第2の支持状態にある支持装置において、クランプ31aをベース部材31bに対して回動させるとともに、受け部31d及びクリップ部31eをベース部材31bに対して回動させると、図30に示す状態とすることができる。
第3の支持状態では、図30に示すように、クリップ部31eを対象物(例えば、テーブル)34の上に置くことで、支持装置31を介してカメラ11を対象物34上に倒立させることができる。第3の支持状態では、図26に示すように、カメラ11の上下が逆となっている。
本実施例では、支持装置を簡単な構成とすることで小型化及び軽量化を図ることができ、支持装置の携帯性を向上させることができる。また、上述したように第1〜第3の支持状態に切り換えることができるため、第1〜第3の支持状態を撮影環境に応じて使い分けることができる。
なお、本実施例では、クランプ31aをカメラ11の上面11g側に装着する構成について説明したが、支持装置のカメラ11に対する装着位置は適宜設定することができる。すなわち、カメラ11の左右方向における側面に支持装置を装着できるように構成したり、カメラ11の下面側に支持装置を装着できるように構成したりしてもよい。
また、実施例1、2で説明した電動雲台の構成において、自動的に電動雲台を動作させる機構を省略した構成とすることができる。すなわち、カメラに装着されるパンモータハウジングをチルトモータハウジングに対して回動可能に連結するとともに、チルトモータハウジングをベース部材に対して回動可能に連結する。これにより、手動によってパンモータハウジングやチルトモータハウジングを回動させることで、電動雲台が装着されたカメラの向きを変えることができる。
このように構成した場合でも、電動雲台が装着されたカメラの携帯性を向上させることができる。
11:カメラ
12:電動雲台
12ba:ベース
12bc:クリップ
12bd:受け部
12bb:回転部
12be:ヒンジ
12pa:チルトモータハウジング
12ph:チルト受光窓
12ya:パンモータハウジング
13ya:パンモータ
13yb:パンモータドライバ
12:電動雲台
12ba:ベース
12bc:クリップ
12bd:受け部
12bb:回転部
12be:ヒンジ
12pa:チルトモータハウジング
12ph:チルト受光窓
12ya:パンモータハウジング
13ya:パンモータ
13yb:パンモータドライバ
Claims (9)
- 脚部材と、
前記脚部材に対して第1の軸回りで回動可能な第1の部材と、
前記第1の部材に対して前記第1の軸に略直交する第2の軸回りで回動可能であり、かつ撮像装置を保持する第2の部材と、
前記第1および第2の部材をそれぞれ回動させる第1および第2のモータとを有し、
前記第1の軸と前記第2の軸とが実質的に同一面内に配置され、かつ前記第1のモータの出力軸および前記第2のモータの出力軸がそれぞれ、実質的に前記第1の軸上および第2の軸上に配置されていることを特徴とする撮像装置の支持装置。 - 前記第1および第2のモータの出力回転をそれぞれ減速する第1の減速機構および第2の減速機構を有し、
前記第1の減速機構の出力軸および前記第2の減速機構の出力軸はそれぞれ、実質的に前記第1の軸上および第2の軸上に配置されていることを特徴とする請求項1に記載の撮像装置の支持装置。 - 前記第2の部材により保持された前記撮像装置を撮影光軸方向から見たときの該撮像装置における前記第2の軸に略直交する方向の長さを第1の長さとし、該第2の軸に略平行方向の長さを第2の長さとするとき、
前記第1の部材は前記1の長さより短く、かつ前記第2の部材は第2の長さよりも短いことを特徴とする請求項1又は2に記載の撮像装置の支持装置。 - 前記第2の部材により保持された前記撮像装置を撮影光軸方向から見たときの該撮像装置における前記第2の軸に略直交する方向に延びる外形辺部を第1の辺部とし、該第2の軸に略平行方向に延びる外形辺部を第2の辺部とするとき、
前記第1の部材が前記1の辺部に沿って延び、かつ前記第2の部材が前記第2の辺部に沿って延びていることを特徴とする請求項1から3のいずれか1つに記載の撮像装置の支持装置。 - 前記第1および第2のモータは、固定子を備えた本体部と前記固定子に対して回転する回転子とを備え、
前記第1のモータの本体部は前記第1の部材に固定され、かつ前記第2のモータの本体部は前記第2の部材に固定されていることを特徴とする請求項1から4のいずれか1つに記載の撮像装置の支持装置。 - 前記第2の部材による前記撮像装置の保持状態を検出する第1の検出手段と、
前記第1および第2のモータの駆動を制御する制御手段とを有し、
前記制御手段は、前記第1の検出手段の出力に基づいて、前記第2の部材が前記撮像装置を保持していないと判断したときに、前記第1および第2のモータの駆動を禁止することを特徴とする請求項1から5のいずれか1つに記載の撮像装置の支持装置。 - 前記第1の部材に対する前記脚部材の回動位置を変えることで、前記撮像装置に対する支持状態を変更可能であることを特徴とする請求項1から6のいずれか1つに記載の撮像装置の支持装置。
- 第1および第2の支持状態で前記撮像装置を支持可能な支持装置であって、
前記第1および第2の支持状態のうち少なくとも一方の支持状態を検出する第2の検出手段と、
該第2の検出手段の検出結果に基づいて、前記第1および第2の部材のうち少なくとも一方の回動量を制限するように前記第1及び第2のモータの少なくとも一方の駆動制御を行う制御手段とを有することを特徴とする請求項7に記載の撮像装置の支持装置。 - 第1および第2の支持状態で前記撮像装置を支持可能な支持装置であって、
前記第1および第2の支持状態のうち少なくとも一方の支持状態を検出する第2の検出手段と、
該第2の検出手段の検出結果に基づいて、前記撮像装置での特定の動作処理を変更させる信号を送信する送信手段とを有することを特徴とする請求項7に記載の撮像装置の支持装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004208796A JP2006033374A (ja) | 2004-07-15 | 2004-07-15 | 撮像装置の支持装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004208796A JP2006033374A (ja) | 2004-07-15 | 2004-07-15 | 撮像装置の支持装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006033374A true JP2006033374A (ja) | 2006-02-02 |
Family
ID=35899197
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004208796A Pending JP2006033374A (ja) | 2004-07-15 | 2004-07-15 | 撮像装置の支持装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006033374A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109668037A (zh) * | 2019-02-01 | 2019-04-23 | 桂林智神信息技术有限公司 | 一种可折叠的手持稳定器 |
-
2004
- 2004-07-15 JP JP2004208796A patent/JP2006033374A/ja active Pending
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109668037A (zh) * | 2019-02-01 | 2019-04-23 | 桂林智神信息技术有限公司 | 一种可折叠的手持稳定器 |
| CN109668037B (zh) * | 2019-02-01 | 2023-07-04 | 桂林智神信息技术股份有限公司 | 一种可折叠的手持稳定器 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7668448B2 (en) | Flash apparatus and imaging apparatus | |
| TWI356964B (ja) | ||
| JP2010288307A (ja) | カメラ | |
| JP6388105B2 (ja) | カメラ装置およびカメラ装置の制御方法 | |
| KR20120038451A (ko) | 제어 장치, 제어 방법, 프로그램, 제어 시스템 | |
| JPH08135889A (ja) | 電動雲台、撮像装置および画像入力装置 | |
| JP2007194952A (ja) | カメラ | |
| CN108153083B (zh) | 滤镜组结构、摄像装置及摄像装置的滤镜控制方法 | |
| JP6124607B2 (ja) | 撮像装置 | |
| JP4530689B2 (ja) | カメラのダイヤル切替装置 | |
| JP2007194953A (ja) | カメラ | |
| JP4610354B2 (ja) | レンズ鏡筒、撮像装置及び光学装置 | |
| JP2005051531A (ja) | 携帯機器 | |
| JP2006033374A (ja) | 撮像装置の支持装置 | |
| JP2007194951A (ja) | カメラ | |
| JP4110876B2 (ja) | デジタルカメラ | |
| JPH11205641A (ja) | 電子カメラ | |
| JP5195091B2 (ja) | 撮像装置 | |
| JP2005164622A (ja) | 撮像装置 | |
| TW200427429A (en) | Display-provided portable electronic device | |
| JP2009284082A (ja) | 電子機器 | |
| JP6942473B2 (ja) | 撮像装置 | |
| JP5891825B2 (ja) | 表示装置 | |
| JP2004054154A (ja) | カメラ | |
| JPH0418533A (ja) | カメラの近接撮影装置 |