JP2005504274A - 4次元ルートプランナ - Google Patents
4次元ルートプランナ Download PDFInfo
- Publication number
- JP2005504274A JP2005504274A JP2003529091A JP2003529091A JP2005504274A JP 2005504274 A JP2005504274 A JP 2005504274A JP 2003529091 A JP2003529091 A JP 2003529091A JP 2003529091 A JP2003529091 A JP 2003529091A JP 2005504274 A JP2005504274 A JP 2005504274A
- Authority
- JP
- Japan
- Prior art keywords
- node
- origin
- cost
- route
- destination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01C—MEASURING DISTANCES, LEVELS OR BEARINGS; SURVEYING; NAVIGATION; GYROSCOPIC INSTRUMENTS; PHOTOGRAMMETRY OR VIDEOGRAMMETRY
- G01C21/00—Navigation; Navigational instruments not provided for in groups G01C1/00 - G01C19/00
- G01C21/20—Instruments for performing navigational calculations
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0005—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot with arrangements to save energy
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/003—Flight plan management
- G08G5/0034—Assembly of a flight plan
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/0047—Navigation or guidance aids for a single aircraft
- G08G5/006—Navigation or guidance aids for a single aircraft in accordance with predefined flight zones, e.g. to avoid prohibited zones
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G5/00—Traffic control systems for aircraft, e.g. air-traffic control [ATC]
- G08G5/0073—Surveillance aids
- G08G5/0091—Surveillance aids for monitoring atmospheric conditions
Abstract
ルートプランナ(110)が、再帰的アルゴリズムを使用して横方向経路を求め、適応アルゴリズムを使用して垂直経路を決定する。垂直経路は、頂部高度および底部高度を有する水平多角形(図3a)によって表される危険エリア(120、図2、3a、および3b)に基づいて調節される。ルートプランナ(110)は、所要到着時間ウィンドウを満たすルートを見つけようと試みる。ルートは、各終了点について所望の到着時間が指定された複数の開始点および終了点に分割することができる。
【選択図】図1
【選択図】図1
Description
【技術分野】
【0001】
本発明はルートプランナに関し、より詳細には4次元ルートプランナに関する。
【背景技術】
【0002】
関連出願への相互参照
本願は、本願の譲受人に譲渡された1998年12月31日出願の米国特許出願第223,846号「多次元ルートオプトマイザ(Multi−Dimensional Route Optimizer)」に関連し、少なくとも、再帰的アルゴリズムを使用する横方向ルート最適化のその教示が参照により本明細書に組み込まれる。
【0003】
著作権表示/許可
この特許文書の開示の一部は、著作権保護の対象である素材を含む。著作権者は、この特許開示が米国特許商標局の特許ファイルまたは記録中に見出されるとき、それが何人によって複製されることに対しても異議はないが、そうでない場合は、すべての権利を何であれ留保する。以下の表示は、下記および本明細書に添付される図面に記載のソフトウェアおよびデータに適用される。著作権(C)2001、Honeywell Inc.、版権所有。
【0004】
安全性と効率性のために、航空機のルート決定は一般に、所定の航空路または大圏針路に沿う。所定の航空路はしばしば、航法援助地上施設を用いて位置合せされる。ある場合には、航空路は地理的領域を迂回する。一方、大圏ルートでは、より短い飛行距離が保証される。
【0005】
天候は、特定のフライトの効率性と安全性のどちらにも影響を及ぼす。航空機効率は、順風と共に向上する。適切な追風では、対地速度が増加し、燃料消費が低下する。燃料消費の低下はしばしば、収益を生み出す追加のペイロードを搬送できることを意味する。対地速度の増加は、フライト時間が短縮され、結果として運航コストが節約されることを意味する。
【0006】
同様に、危険な天候により、航空機運航に関する様々なコストを負う可能性がある。このようなコストは、乗客にとって搭乗が不快なものとなるという安価なものから、構造上の損傷、さらには航空機や人命が失われるという高価なものまで多岐にわたる。航空機の操縦士は通常、危険な天候を回避するために長距離を進む。
【0007】
加えて、ある地理的領域および政治的領域は、制限空域によって覆われる。そのような領域および厳しい天候は危険エリアと呼ばれる。ある領域におけるフライトは、高価な上空通過料金を課されることがあるので最小限に抑えることが好ましい。
【0008】
所望の到着時間を達成することにより、操縦士がより正確にフライトをスケジュールし、より高い運航効率を亨受することが可能となるので、そのことは重要である。所定の航空路または大圏針路を運航する航空機は、スケジューリング要件を満たすために対気速度に対してコストのかかる調節を行うことを余儀なくされる可能性がある。
【発明の開示】
【発明が解決しようとする課題】
【0009】
典型的な飛行経路ルータは、横方向に飛行経路をプロットして、危険を回避し、風を利用し、経路の垂直部分は標準巡航プロファイルのままにする。さらに、飛行経路ルータは、気流の高度を考慮に入れる。このようなルート決定は通常、危険エリアの垂直次元と、危険エリアが時間変化する性質とを考慮せず、したがって得られるルートがそれほど望ましいものでなくなる。こうした欠点に対処するシステムが求められている。
【課題を解決するための手段】
【0010】
ルートプランナが動的プログラミング(DP)再帰的アルゴリズムを使用して、横方向/垂直経路を決定する。コスト関数は、燃料コスト、時間コスト、危険コストからなり、上空通過料金が最小限に抑えられる。危険エリアは、頂部高度および底部高度を有する多角形によって記述される。一実施形態では、危険エリアに針路および速度が与えられ、したがって時間と共に移動する。
【0011】
このルートプランナは、起点および目的地について確立されたノードのグリッド中のノードからノードへと移動することによって針路を決定する。ローカルステップコストが、次のノードに対する累積コストに追加される。ノードに対する累積コストが最低となるノードへの遷移ステップが保持され、その結果として、起点から目的地への最低コストルートが発見される。危険エリアに直面したとき、その危険を通過しない低コスト遷移を発見しようと試みて、新しいノードへの移動が複数の垂直経路で探査される。このステップが危険を通過する場合、増分危険コストが累積コストに追加される。別の実施形態では、ルートプランナが、所要到着時間ウィンドウを満たすルートを発見しようと試みる。ルートは、各終了点について所望の到着時間が指定された複数の開始点および終了点に分割することができる。
【発明を実施するための最良の形態】
【0012】
以下の説明では、本明細書の一部を形成し、本発明を実施することができる特定の実施形態を例示的に示す添付の図面を参照する。当業者が本発明を実施することが可能となるように、こうした実施形態を十分詳細に説明する。本発明の範囲から逸脱することなく、他の実施形態を使用することもでき、構造的、論理的、電気的変更を行えることを理解されたい。したがって、以下の説明を限定的な意味に理解すべきではなく、本発明の範囲は添付の特許請求の範囲によって定義される。
【0013】
システムのためのソフトウェアがコンピュータ可読媒体上に格納される。一実施形態では、ソフトウェアは、ディスクドライブなどの2次記憶装置上に格納され、必要に応じてコンピュータのメインメモリおよびキャッシュ内にロードされる。ソフトウェアは、単一の機能または関連する機能のサブセットを一般に提供するモジュールの形で書かれる。しかし、様々な実施形態では、ソフトウェアは単一モジュールまたは多数のモジュールを含み、機能をグループ化するという要件は存在しない。別の実施形態では、本発明を実装するのにハードウェアおよび/またはファームウェアが使用される。ソフトウェアが機能を実装することができ、あるいは、メニュー駆動インターフェース、またはデータベース記憶用のシステムに情報を提供する他の手段を提供することにより、単に人間による機能の実施を容易にすることができる。
【0014】
航空機などのビークルについてのルート最適化が、本発明のルートオプティマイザによって提供される。ルート最適化は、横方向経路および垂直経路からなる。横方向経路は、本願の譲受人に譲渡され、少なくとも、再帰的アルゴリズムを使用する横方向ルート最適化のその教示が参照により本明細書に組み込まれる1998年12月31日出願の米国特許出願第09/223,846号「多次元ルートオプトマイザ(Multi−Dimensional Route Optimizer)」に大部分は従って決定される。
【0015】
垂直経路は、3次元危険エリアを考慮に入れる適応アルゴリズムを使用することによって決定される。3次元危険エリアは、高さを有し、速度成分および方向成分も有することができる多角形として表される。
【0016】
定義セクションをまず与え、その後に続いて、高レベルから見たルートオプティマイザの概要を与える。次に、危険エリアの表現を定義し、その後に続いて、そのような危険エリアを考慮に入れて、垂直経路および水平経路をどのように計算するかに関してさらに詳述する。
【0017】
定義
CL 揚力係数
Cd 抗力係数
CI コスト指数
CF コスト関数
D 抗力
Dgc 飛行した大圏距離
FFR 燃料の流量
h 高度
h(k0) 前のグリッドポイントからの高度
hupper
hlower
L 揚力
M マッハ数
MTOW 最大離陸重量
mf 燃料の質量
sos 音速
V 対地速度
Va 対気速度
Vw 風速
W 重量
Wf 燃料の重量
R 上空通過に対する料金
RTA 所要到着時間
Sa 空力的基準エリア
S 移動したアーク長距離
T 上空通過料金における単位レート
ΔS 移動したアーク長距離におけるステップ
θ 経度
φ 緯度
π スロットル
Ψ 上空通過料金に対する大円方向
【0018】
図1の110で全体が表されるルートソルバ(route solver)が、燃料コスト、時間コスト、危険コスト、および上空通過料金からなる合成コスト関数を最小限に抑え、かつ所要到着時間(RTA)を満たす4次元(3つの位置と時間)ルートを計算する。一実施形態では、ルートソルバ110は、ビデオモニタを備えるデジタルコンピュータでホストされる。プロセッサは、NWSグローバルGRIBデータなどから風/温度情報115を受け取り、ソルバに高層風および温度の表現を与える。120で天候情報を受け取る。天候情報は、対流性流れ、乱気流、着氷などを表す。この情報は、外部源からも供給され、ソルバのユーザがインターフェース125を介して入力することもでき、パイロットおよび/または運航管理者が使用することもできる。
【0019】
処理要素は、パイロット/運航管理者インターフェース120、世界地図生成130、コスト関数決定135、天候危険生成120、風生成115、航空機巡航性能(燃料流量、速度、および高度)140、上空通過料金145、4次元ルートソルバ150である。
【0020】
1.1 パイロット/運航管理者インターフェース
オペレータ、パイロット、または運航管理者は、ユーザインターフェース125を介してルートソルバと対話することができる。ユーザインターフェースの1スクリーンショットを図2に示す。オペレータは、起点、目的地、所要到着時間、ルートに沿った停止点、厳しい天候などの危険、火山灰、特別用途空域、および政治的に微妙な領域、危険重み付け、所要到着時間を入力することができる。到着時間を選択する前に、オペレータは到着時間ウィンドウの計算を依頼することができる。オペレータは、ウインドフィールド(wind field)および危険のオーバーレイを有する世界地図上で、ルート計画状況を閲覧する。危険は多角形として示され、標識が付けられる。図2の2つの危険に、4*および5*と標識が付けられている。それらの高さが、ワールドビューの下のフレームに示されている。
【0021】
オペレータは、都市のペア、危険、危険重み付け、および所要到着時間を入力することができる。計算の後、水平ルートがワードマップ上に表示される。危険が重ねられた垂直ルートも表示される。燃料時間平均速度およびコストの性能結果を含むウィンドウを選択することができる。オペレータは、危険重み付けを変更することによってルートに変化を与えることができる。
【0022】
1.2 ルート決定方法
ルートは、動的プログラミング(DP)方法を使用して計算される。DPでは、コスト関数を最小限に抑える経路を見つけるようにグリッド上で探索が実施される。コスト関数は、燃料コスト、時間コスト、危険コスト、および上空通過コストを含む。全コストは、増分コストの和である。
ΔCost=ΔCostfuel+ΔCosttime+ChΔcosthazard+Δcostoverflight
以下で、コスト関数中の各項を説明する。
【0023】
危険コスト:危険は、厳しい天候、火山灰、特別用途空域、および政治的に微妙な領域である。危険コストのすべては、同様に求めることができる。危険表現は、危険表現の斜視図を示す図3Aに示すように3次元である。図3Bに、危険表現の高度を、頂部高度および底部高度を有するものとして示す。一部の危険エリアは、底部高度が地表面であり、航空機の範囲を超える頂部高度を有する。危険多角形は、図4に示すように、ある基準時間から開始して、固定の針路および速度で移動する。
【0024】
天候コストは、厳しい天候領域を通過する危険を表す。天候危険は、対流、乱気流、および着氷に分類される。天候領域は、図5に示すように、厳しい天候領域を囲む多角形として表される。多角形は、危険な天候の実際のレーダエコーを示す白い正方形を囲む2重線として示される。一実施形態では、多角形は複数の頂点を有し、システムのオペレータによって選択され、または天候情報から自動的に生成される。
【0025】
危険データベースは、多角形の頂点、速度、針路、領域の頂部および底部、ならびに関連する危険コストからなり、これらを図2でユーザが入力することができる。
危険コストは、特定のセルの危険コストおよびステップ中に移動した距離に依存する。危険における水平ステップの長さを決定する方法を図6Aおよび6Bに示す。
【0026】
距離を計算するために、領域が、点が反時計回り順に指定された凸多角形であると仮定する。ステップは以下の通りである。各多角形セグメントについて、dを決定する。
v=pi×pi+1
d=v・p
各多角形セグメントについて、Pnext、Pcurrentに対応するdnext、dcurrentを定義する。
【0027】
dnext、dcurrent<0である場合=>セグメントは外側にあるので、終了する
そうではなく、dnext<0、dcurrent>0である場合=>Pnextをクリップする
そうではなく、dnext>0、dcurrent<0である場合=>Pcurrentをクリップする
上式で、pnextに対するクリップ関数は、
【0028】
【数1】
 【0029】
【0029】
各多角形に対してルートセグメントを処理した後、多角形と元のルートセグメントの共通部分(Δs1)は、
【0030】
【数2】
【0031】
危険コストは、危険中の距離(Δs1)とステップ距離との比でスケーリングされる。
【0032】
【数3】
【0033】
燃料コストおよび時間コスト:燃料コストおよび時間コストは、航空機の最適巡航性能条件から決定される。2つの異なるタイプの巡航性能が存在する。危険エリアが存在しない場合、巡航コスト関数を最適化するために巡航高度および巡航速度が自由に選ばれる。危険エリアが存在する場合、巡航高度、例えば危険エリアの頂部高度または底部高度を指定することができる。したがって、2つの可能な巡航解のタイプが存在する。1)条件のない巡航:高度が自由に選ばれる、2)条件付き高度巡航:高度が指定される。
【0034】
巡航の際には、コスト積分(C)が最小限に抑えられる。
【0035】
【数4】
【0036】
CIは、(貨幣単位の)時間のコストと、(貨幣単位の)燃料のコストとの比である。コスト指標(CI)を増加させることにより、時間により強い強調を置くことができる。小さいアーク長ステップΔSについて、燃料、時間、およびコスト増分は、
【0037】
【数5】
【0038】
伝統的に、燃料/時間コストが、単一コスト関数(CF)として組み合わされる。
CF=(FFR+CI)/V
この場合、ΔCost=CFΔs
燃料/時間巡航性能解が、航空機製造業者によって事前計算され、次いでユーザに対して、重量、コスト指数、風速、および高度の各パラメータの関数としてテーブル内に供給される。この2つのタイプの巡航モデルは、
高度制限のない巡航:高度の指定なし
【0039】
【数6】
【0040】
高度制限のある巡航:高度の指定あり
【0041】
【数7】
【0042】
航空機が自由巡航しているときは、高度制限のない解が使用される。航空機が自由巡航高度より上または下の高度で飛行することを余儀なくされるとき、高度制限のある解が使用される。上記のモデルは、フライト管理システムで使用される典型的なものである。
【0043】
上空通過料金:一般には、上空通過料金は、重量、移動距離、およびレート(距離当たりのコスト)に依存する。上空通過料金は、国ごとに別々に計算される。一部の料金タイプは固定レートであり、重量の関数であり、重量、距離、およびレートの関数であり、以下は、使用されるいくつかの公式である。
【0044】
公式#1(ユーロコントロールの国々およびその他の国々)
【0045】
【数8】
【0046】
上式で、
R=料金
T=単位レート
Dge=飛行した大圏距離
W=メートルトン単位の最大離陸重量(MTOW)
公式#2(ASECNAの国々)
R=単位レート×係数(表1から決定)
【0047】
【表1】
【0048】
距離は、実際の飛行した距離、あるいは入口点と、目的地の国の空港、すなわち出口点との間の大圏距離、あるいは起点の国の空港と、国の出口点との間の大圏距離でよい。移動した距離と大圏距離の差を図7に示す。国境は、政治的境界、ATCフライト情報領域(FIR)、または両者の組合せである。
【0049】
大圏距離を計算するために、国の入口点および出発点によって定義される大圏の平面上へのステップ距離(ΔS)の射影が使用される(図8参照)。入口点(Re)および出発点(Rd)を含む平面に対する法線は、
【0050】
【数9】
【0051】
地球中心座標系でのnの各成分が、x軸が地球から外に向く現時点の座標系まで回転する。
nR=T(φ,θ)ne
次に、現地点R、(n1 ―)(n1 ―はn1の頭上にーが付された記号を示す)での地方垂直線上へのnの射影が、Rでのn1 ―の垂直成分をゼロに設定することによって求められる。
【0052】
【数10】
【0053】
次いでΔSの射影は、
【0054】
【数11】
【0055】
距離因子が大圏距離であるとき、上空通過コストを計算するために軌跡の反復が必要である。最初の反復時に、実行中、距離に関して大圏距離ではなくアーク長が使用される。やはり最初の反復時に、国の入口点および出発点が、リトレース中の実行の終りに計算される。後続の反復では、先のパスからの国の入口点および出発点が、大圏距離の計算で使用される。
【0056】
反復プロセスの収束の助けとなるように、最初の反復の後に、ルートを決定する探索の領域が、図9Aおよび図9Bに示すように先のルートの周りの領域に限定される。
地点が領域内にあるかどうかを決定するのに以下の式が使用される。地球座標での入口点と出発点との間の距離は、
ΔRpx=Rdx−Rex
ΔRpy=Rdy−Rey
ΔRpz=Rdz−Rez
地方垂直線座標系での相対距離は、
ΔRx=cosφcosθΔRex+cosφsinθΔRey+sinφΔRez
ΔRy=sinθΔRex+cosθΔRey
ΔRz=−sinφcosθΔRex−cosφsinθΔRey+cosφΔRez
地方垂直線座標系と、y軸が大圏に沿う座標系との間の角度は、
【0057】
【数12】
【0058】
探索領域は以下によって定義される。
ymax=cosφΔRy+sinΨΔRz+2k
zmax=500nm
k=100nm
地球座標系での入口点から測定した現相対位置の成分は、
ΔRpx=Rpx−Rex
ΔRpy=Rpy−Rey
ΔRpz=Rpz−Rez
地方垂直線座標系での現相対位置(ΔRp)の成分は、
ΔRpx=cosφcosθΔRpex+cosφsinθΔRpey+sinφΔRpez
ΔRpy=sinθΔRpex+cosθΔRpey
ΔRpz=−sinφcosθΔRpex−cosφsinθΔRpey+cosφΔRpez
回転後座標系での現相対位置は、
y=cosΨΔRpy+sinΨΔRpz
z=−sinΨΔRpy+cosΨΔRpz
yでのz境界点は、
【0059】
【数13】
【0060】
点(y,z)が探索領域内にあるかどうかを決定するのに以下の式を使用する。
if(z≦z1かつz≧z2) then 領域内にあり、
sf=1.05Δsp/Δs ; if (sf≧1) sf=1 ; sf=目盛係数
else 領域外にあり、then
sf=10
end
上空通過料金計算で使用される距離は、目盛係数にステップ距離を掛けたものである。
d=sfΔS
したがって、領域外にいることに対して大きなペナルティがある。
【0061】
1.2 4次元(4D)動的プログラミングルートソルバ
以下では、4次元(緯度、経度、高度、および時間)ルートソルバを説明する。まず、3次元動的プログラミングルートソルバを説明し、次いで、複数点所要到着時間(RTA)関数を説明する。
【0062】
動的プログラミング(DP)方法では、コスト関数を最小限に抑えるのに3Dグリッド探索が実施される。DP解公式は、1組の状態遷移式と、コスト関数を最小限に抑えるための帰納式からなる。DP式の一般形は、
状態遷移
θk+1=θk+Δθ
φk+1=φk+Δφ
hk+1=hk+Δh
帰納的コスト
【0063】
【数14】
【0064】
Δφ,Δθ,Δh=管理
水平軸では固定パターン探索を使用するが、垂直軸では、計算の数を低減するために適応探索を使用る。
【0065】
計算は起点で始まり、目的地で終了する。これにより、針路および速度を使用して危険位置を時間における前方に伝播することが可能となる。重量を含む状態条件が既知であるので、起点での開始により、フライト中のルートの再計算も可能となる。
【0066】
3次元グリッドおよびグリッドポイント間の遷移タイプを図10A、10B、10C、および10Dに示す。起点および目的地点は、図10Aの3次元グリッド内に含まれる。図10Bでは、11個の潜在的横方向ステップが示されている。別の実施形態では、より少数または多数の潜在的ステップを探索することができ、目的地から離れる方向であっても探索することができる。図示するように、各ステップの距離は、移動するグリッドポイントに依存する。図10Cでは、ノードからの5個の異なる垂直ステップが示されている。より少ない数を探索することもできる。図10Dは、水平ステップすなわち横方向ステップと垂直ステップの組合せの図形表現である。
【0067】
DPプロセスの例示を図11および12に示す。図11では、水平軸でのプロセスの第1および第2ステージが示されている。この例では、各進入向首方向について、9つの出口向首方向が存在する。図12に示すように、各水平遷移について、いくつかの垂直遷移が調査される。水平遷移と同様に、垂直遷移は所定ではなく、位置および危険セルの数に依存する。すなわち、垂直探索は、その前の状態にそれ自体を適合させる。この適応探索手法により、実行しなければならない計算の数が低減される。
【0068】
垂直遷移高度は、重複する危険の異なる構成に対して異なる。高度割当ては、複数の危険セルに対する条件のない巡航高度の位置に依存する。まず、条件のない巡航高度の位置を見つけ、次いでその位置に応じて、他の遷移高度を、危険セルの頂部および底部に割り当てる。図12に示すこの例では、条件のない巡航高度が、天候セルの間にある。この場合、巡航高度が高度h(1)に割り当てられ、セル(1)の頂部が高度h(2)に割り当てられ、セル(2)の底部がh(3)に割り当てられる。
【0069】
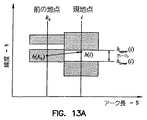
現ステップでは、増分遷移コストが計算される。遷移コストは、燃料、時間、上空通過料金のコストと、そのステップで危険を通過する場合の危険コストとを含む。垂直遷移が天候を通過するかどうかを決定するために、2点間の危険セルの間にホールが存在するかどうかが決定される。2つの危険がある構成についてのホール計算の一例を図13Aおよび図13Bに示す。図13Aに、荒天のノードから荒天でないノードへの遷移を示す。図13Bに、経路が荒天を横切らない、荒天でない2点間の遷移を示す。
【0070】
以下の論理により、ホールが存在するか否かおよびホールサイズが決定される。まず、以前の高度の周囲の空間に対する高度の上界および下界がグリッドポイントで可能され、現地点の周囲の空間に対する上界および下界も計算される。次いで、以下が計算される。
【0071】
a)荒天での以前の高度(図13A参照)
i=遷移する高度(i=1,jvlevels)
h(k0)<hupper(i)かつh(k0)>hlower(i)である場合、ホールが存在する
holesize=hupper(i)−hlower(i)
b)荒天でない以前の高度(図13B参照)
if(hupper0<hupper(i))then
holehigh=hupper0
else
holehigh=hupper(i)
endif
if(hlower0<hlower(i))then
holelow=hlower0
else
holelow=hlower(i)
endif
holesize=hhigh−hlow
c)ホールの存在
holesize>1000ft.(304.8メートル)である場合、ホールが存在する
ホールが存在する場合、遷移は荒天を通過しない。その場合遷移コストは、
ΔC=(Δfuel+CIΔt)hfree ;非制限巡航へ移行し且つ危険に遭遇しない場合
ΔC=(Δfuel+CIΔt)hfree+Δhazard ; 非制限巡航へ移行し且つ危険に遭遇する場合
ΔC=(Δfuel+CIΔt)hspecified ; 制限巡航へ移行し且つ危険に遭遇しない場合
ΔC=(Δfuel+CIΔt)hspecified +Δhazard ; 制限巡航へ移行し且つ危険に遭遇する場合
最後に、合計累積コストをコスト再帰公式
C(ip,jp,kp)=C(i0,j0,k0)+ΔC
から計算する。
【0072】
先に地点に達した場合、以前のコストを現コストと比較する。合計現コストがノードに格納された合計コストよりも低い場合、その新しいコスト、進入方向、高度、重量、時間、hupper、hlowerがグリッド位置ip,jp,kpに格納される。遷移高度に対応する高度グリッドポイント位置(kp)は、
kp=整数(h(kv)/Δh+.5)
上式で、
kv=垂直遷移数(図12の例示ではkv=1,3)
各グリッド点に格納される量は、
C(ip,jp,kp)=C(i0,j0,k0)+ΔC
hor_entry(ip,jp,kp)=entry_direction
vert_entrydirection(ip,jp,kp)=kp−k0
weight(ip,jp,kp)=weight(i0,j0,k0)−Δw
time(ip,jp,kp)=time(i0,j0,k0)−Δt
h(ip,jp,kp)=h(kv)
hupper(ip,jp,kp)=hupper(kv)
hlower(ip,jp,kp)=hlower(kv)
高度グリッドがいくつかの離散的レベルに量子化される場合であっても、実際の高度(例えば条件なし巡航高度)が離散的位置に格納され、取り出すことができるので、それがより正確にわかることに留意されたい。
【0073】
複数のRTA(所要到着時間)関数が、軌跡に沿う複数の地点での到着時間に適合する軌跡を計画する。複数のRTAの手法は、順次式の手法である。まず、第1の都市での到着時間に適合する軌跡を計算する。次に、後続の各都市または位置への到着時間に適合する軌跡を決定する。各地点でのRTAが、現地点と次の地点の間の軌跡反復によって達成される。最初の反復時に、コスト指標を選択する。第1軌跡を計算した後、到着時間誤差を計算し、コスト指標を到着時間誤差と共に変更し、軌跡を再計算する。
【0074】
CIi+1=CIi+KΔTi
次の地点での所望の到着時間を達成した後、後続の各地点についてプロセスを反復する。次のシーケンスの開始に関する重量および時間の初期条件は、先のプロセスの終了時の重量および時間である。順次データを合計し、燃料使用料および平均速度を決定する。
【0075】
RTAウィンドウ関数は、最も早い可能な到着時間および最も遅い可能な到着時間を決定する。最も早い到着時間は、CI=CImaxに設定することによって求められる。最も遅い到着時間は、CIを最大航続時間値(CImin)に設定することによって求められる。この設定でフライトを計算し、次いで、残りの燃料が予備レベルに達するまでフライトの延長をシミュレーションする。この延長巡航により、待機経路または別のルート延長操作で使用される燃料および時間が推定される。
【0076】
結論
このルートソルバは、航空便の運航管理者またはパイロットがルートを計画する助けとなる。一般には、フライトを計画するとき、パイロットまたは運航管理者は、燃料、時間、および上空通過料金を最小限に抑え、厳しい天候(対流、乱気流、および着氷)、特別用途空域、火山灰、環境的および政治的に微妙な領域などの危険領域を回避することを望む。ルート決定問題を図14に示す。燃料/時間性能を最良にするために、最良のルートは、風プロファイルをたどることができ、危険領域の周囲、上、または下を飛行することができる。
【0077】
以下の様々な目標のうち1つまたは複数を満たすルートが発見される。
・燃料を最小限に抑える
・時間または時間ウィンドウを満たし、またはフライト時間を最小限に抑える
・厳しい天候の領域を回避する
・特別用途空域、火山灰、環境的に微妙な領域などの他の危険領域を回避する
・政治的に微妙な領域を回避する
・非常時にフライトを最も近い空港または望ましい空港にルート変更する
コスト関数に危険コストを含めることにより、危険範囲が探索エリア全体にわたる場合であっても解が保証される。起点から開始し、目的地まで進むことにより、危険位置を時間的に前方に射影することができ、より良好な解が得られる。
【図面の簡単な説明】
【0078】
【図1】ルートオプティマイザのブロック図である。
【図2】図1のルートオプティマイザに関するユーザインターフェースのコンピュータスクリーンショットである。
【図3A】頂部高度および底部高度を有する多角形によって表される危険な天候の3次元表現を示すプロットである。
【図3B】図3Aの多角形の頂部高度および底部高度を示すプロットである。
【図4】針路および方向を有する天候を示すプロットである。
【図5】多角形境界で定義された危険領域を示すNCARグレーデッドデータのコンピュータスクリーンショットである。
【図6A】危険エリア内の水平ステップの長さを決定する方法の3次元グラフ表現である。
【図6B】危険エリア内の水平ステップの長さを決定する方法の2次元グラフ表現である。
【図7】入口点および出口点を有する国境を超えるフライト経路の表現である。
【図8】大圏平面上のステップ距離の射影である。
【図9A】軌跡反復に関する収束領域のグラフ表現である。
【図9B】軌跡反復に関する収束領域のグラフ表現である。
【図10A】ルートオプティマイザによって使用されるノードの3次元グリッドの表現である。
【図10B】所与のノードから調査すべき横方向ステップのグラフ表現である。
【図10C】所与のノードから調査すべき垂直ステップのグラフ表現である。
【図10D】所与のノードから調査すべき合成横方向/垂直ステップのグラフ表現である。
【図11】横方向経路を決定するのに使用される反復的プロセスのグラフ表現である。
【図12】荒天を通る様々なタイプの遷移のグラフ表現である。
【図13A】荒天の高度からの遷移のグラフ表現である。
【図13B】荒天でない高度からの遷移のグラフ表現である。
【図14】危険、国上空通過料金、およびウインドフィールドを示すルート計画に対する幾何形状の3次元表現である。
【0001】
本発明はルートプランナに関し、より詳細には4次元ルートプランナに関する。
【背景技術】
【0002】
関連出願への相互参照
本願は、本願の譲受人に譲渡された1998年12月31日出願の米国特許出願第223,846号「多次元ルートオプトマイザ(Multi−Dimensional Route Optimizer)」に関連し、少なくとも、再帰的アルゴリズムを使用する横方向ルート最適化のその教示が参照により本明細書に組み込まれる。
【0003】
著作権表示/許可
この特許文書の開示の一部は、著作権保護の対象である素材を含む。著作権者は、この特許開示が米国特許商標局の特許ファイルまたは記録中に見出されるとき、それが何人によって複製されることに対しても異議はないが、そうでない場合は、すべての権利を何であれ留保する。以下の表示は、下記および本明細書に添付される図面に記載のソフトウェアおよびデータに適用される。著作権(C)2001、Honeywell Inc.、版権所有。
【0004】
安全性と効率性のために、航空機のルート決定は一般に、所定の航空路または大圏針路に沿う。所定の航空路はしばしば、航法援助地上施設を用いて位置合せされる。ある場合には、航空路は地理的領域を迂回する。一方、大圏ルートでは、より短い飛行距離が保証される。
【0005】
天候は、特定のフライトの効率性と安全性のどちらにも影響を及ぼす。航空機効率は、順風と共に向上する。適切な追風では、対地速度が増加し、燃料消費が低下する。燃料消費の低下はしばしば、収益を生み出す追加のペイロードを搬送できることを意味する。対地速度の増加は、フライト時間が短縮され、結果として運航コストが節約されることを意味する。
【0006】
同様に、危険な天候により、航空機運航に関する様々なコストを負う可能性がある。このようなコストは、乗客にとって搭乗が不快なものとなるという安価なものから、構造上の損傷、さらには航空機や人命が失われるという高価なものまで多岐にわたる。航空機の操縦士は通常、危険な天候を回避するために長距離を進む。
【0007】
加えて、ある地理的領域および政治的領域は、制限空域によって覆われる。そのような領域および厳しい天候は危険エリアと呼ばれる。ある領域におけるフライトは、高価な上空通過料金を課されることがあるので最小限に抑えることが好ましい。
【0008】
所望の到着時間を達成することにより、操縦士がより正確にフライトをスケジュールし、より高い運航効率を亨受することが可能となるので、そのことは重要である。所定の航空路または大圏針路を運航する航空機は、スケジューリング要件を満たすために対気速度に対してコストのかかる調節を行うことを余儀なくされる可能性がある。
【発明の開示】
【発明が解決しようとする課題】
【0009】
典型的な飛行経路ルータは、横方向に飛行経路をプロットして、危険を回避し、風を利用し、経路の垂直部分は標準巡航プロファイルのままにする。さらに、飛行経路ルータは、気流の高度を考慮に入れる。このようなルート決定は通常、危険エリアの垂直次元と、危険エリアが時間変化する性質とを考慮せず、したがって得られるルートがそれほど望ましいものでなくなる。こうした欠点に対処するシステムが求められている。
【課題を解決するための手段】
【0010】
ルートプランナが動的プログラミング(DP)再帰的アルゴリズムを使用して、横方向/垂直経路を決定する。コスト関数は、燃料コスト、時間コスト、危険コストからなり、上空通過料金が最小限に抑えられる。危険エリアは、頂部高度および底部高度を有する多角形によって記述される。一実施形態では、危険エリアに針路および速度が与えられ、したがって時間と共に移動する。
【0011】
このルートプランナは、起点および目的地について確立されたノードのグリッド中のノードからノードへと移動することによって針路を決定する。ローカルステップコストが、次のノードに対する累積コストに追加される。ノードに対する累積コストが最低となるノードへの遷移ステップが保持され、その結果として、起点から目的地への最低コストルートが発見される。危険エリアに直面したとき、その危険を通過しない低コスト遷移を発見しようと試みて、新しいノードへの移動が複数の垂直経路で探査される。このステップが危険を通過する場合、増分危険コストが累積コストに追加される。別の実施形態では、ルートプランナが、所要到着時間ウィンドウを満たすルートを発見しようと試みる。ルートは、各終了点について所望の到着時間が指定された複数の開始点および終了点に分割することができる。
【発明を実施するための最良の形態】
【0012】
以下の説明では、本明細書の一部を形成し、本発明を実施することができる特定の実施形態を例示的に示す添付の図面を参照する。当業者が本発明を実施することが可能となるように、こうした実施形態を十分詳細に説明する。本発明の範囲から逸脱することなく、他の実施形態を使用することもでき、構造的、論理的、電気的変更を行えることを理解されたい。したがって、以下の説明を限定的な意味に理解すべきではなく、本発明の範囲は添付の特許請求の範囲によって定義される。
【0013】
システムのためのソフトウェアがコンピュータ可読媒体上に格納される。一実施形態では、ソフトウェアは、ディスクドライブなどの2次記憶装置上に格納され、必要に応じてコンピュータのメインメモリおよびキャッシュ内にロードされる。ソフトウェアは、単一の機能または関連する機能のサブセットを一般に提供するモジュールの形で書かれる。しかし、様々な実施形態では、ソフトウェアは単一モジュールまたは多数のモジュールを含み、機能をグループ化するという要件は存在しない。別の実施形態では、本発明を実装するのにハードウェアおよび/またはファームウェアが使用される。ソフトウェアが機能を実装することができ、あるいは、メニュー駆動インターフェース、またはデータベース記憶用のシステムに情報を提供する他の手段を提供することにより、単に人間による機能の実施を容易にすることができる。
【0014】
航空機などのビークルについてのルート最適化が、本発明のルートオプティマイザによって提供される。ルート最適化は、横方向経路および垂直経路からなる。横方向経路は、本願の譲受人に譲渡され、少なくとも、再帰的アルゴリズムを使用する横方向ルート最適化のその教示が参照により本明細書に組み込まれる1998年12月31日出願の米国特許出願第09/223,846号「多次元ルートオプトマイザ(Multi−Dimensional Route Optimizer)」に大部分は従って決定される。
【0015】
垂直経路は、3次元危険エリアを考慮に入れる適応アルゴリズムを使用することによって決定される。3次元危険エリアは、高さを有し、速度成分および方向成分も有することができる多角形として表される。
【0016】
定義セクションをまず与え、その後に続いて、高レベルから見たルートオプティマイザの概要を与える。次に、危険エリアの表現を定義し、その後に続いて、そのような危険エリアを考慮に入れて、垂直経路および水平経路をどのように計算するかに関してさらに詳述する。
【0017】
定義
CL 揚力係数
Cd 抗力係数
CI コスト指数
CF コスト関数
D 抗力
Dgc 飛行した大圏距離
FFR 燃料の流量
h 高度
h(k0) 前のグリッドポイントからの高度
hupper
hlower
L 揚力
M マッハ数
MTOW 最大離陸重量
mf 燃料の質量
sos 音速
V 対地速度
Va 対気速度
Vw 風速
W 重量
Wf 燃料の重量
R 上空通過に対する料金
RTA 所要到着時間
Sa 空力的基準エリア
S 移動したアーク長距離
T 上空通過料金における単位レート
ΔS 移動したアーク長距離におけるステップ
θ 経度
φ 緯度
π スロットル
Ψ 上空通過料金に対する大円方向
【0018】
図1の110で全体が表されるルートソルバ(route solver)が、燃料コスト、時間コスト、危険コスト、および上空通過料金からなる合成コスト関数を最小限に抑え、かつ所要到着時間(RTA)を満たす4次元(3つの位置と時間)ルートを計算する。一実施形態では、ルートソルバ110は、ビデオモニタを備えるデジタルコンピュータでホストされる。プロセッサは、NWSグローバルGRIBデータなどから風/温度情報115を受け取り、ソルバに高層風および温度の表現を与える。120で天候情報を受け取る。天候情報は、対流性流れ、乱気流、着氷などを表す。この情報は、外部源からも供給され、ソルバのユーザがインターフェース125を介して入力することもでき、パイロットおよび/または運航管理者が使用することもできる。
【0019】
処理要素は、パイロット/運航管理者インターフェース120、世界地図生成130、コスト関数決定135、天候危険生成120、風生成115、航空機巡航性能(燃料流量、速度、および高度)140、上空通過料金145、4次元ルートソルバ150である。
【0020】
1.1 パイロット/運航管理者インターフェース
オペレータ、パイロット、または運航管理者は、ユーザインターフェース125を介してルートソルバと対話することができる。ユーザインターフェースの1スクリーンショットを図2に示す。オペレータは、起点、目的地、所要到着時間、ルートに沿った停止点、厳しい天候などの危険、火山灰、特別用途空域、および政治的に微妙な領域、危険重み付け、所要到着時間を入力することができる。到着時間を選択する前に、オペレータは到着時間ウィンドウの計算を依頼することができる。オペレータは、ウインドフィールド(wind field)および危険のオーバーレイを有する世界地図上で、ルート計画状況を閲覧する。危険は多角形として示され、標識が付けられる。図2の2つの危険に、4*および5*と標識が付けられている。それらの高さが、ワールドビューの下のフレームに示されている。
【0021】
オペレータは、都市のペア、危険、危険重み付け、および所要到着時間を入力することができる。計算の後、水平ルートがワードマップ上に表示される。危険が重ねられた垂直ルートも表示される。燃料時間平均速度およびコストの性能結果を含むウィンドウを選択することができる。オペレータは、危険重み付けを変更することによってルートに変化を与えることができる。
【0022】
1.2 ルート決定方法
ルートは、動的プログラミング(DP)方法を使用して計算される。DPでは、コスト関数を最小限に抑える経路を見つけるようにグリッド上で探索が実施される。コスト関数は、燃料コスト、時間コスト、危険コスト、および上空通過コストを含む。全コストは、増分コストの和である。
ΔCost=ΔCostfuel+ΔCosttime+ChΔcosthazard+Δcostoverflight
以下で、コスト関数中の各項を説明する。
【0023】
危険コスト:危険は、厳しい天候、火山灰、特別用途空域、および政治的に微妙な領域である。危険コストのすべては、同様に求めることができる。危険表現は、危険表現の斜視図を示す図3Aに示すように3次元である。図3Bに、危険表現の高度を、頂部高度および底部高度を有するものとして示す。一部の危険エリアは、底部高度が地表面であり、航空機の範囲を超える頂部高度を有する。危険多角形は、図4に示すように、ある基準時間から開始して、固定の針路および速度で移動する。
【0024】
天候コストは、厳しい天候領域を通過する危険を表す。天候危険は、対流、乱気流、および着氷に分類される。天候領域は、図5に示すように、厳しい天候領域を囲む多角形として表される。多角形は、危険な天候の実際のレーダエコーを示す白い正方形を囲む2重線として示される。一実施形態では、多角形は複数の頂点を有し、システムのオペレータによって選択され、または天候情報から自動的に生成される。
【0025】
危険データベースは、多角形の頂点、速度、針路、領域の頂部および底部、ならびに関連する危険コストからなり、これらを図2でユーザが入力することができる。
危険コストは、特定のセルの危険コストおよびステップ中に移動した距離に依存する。危険における水平ステップの長さを決定する方法を図6Aおよび6Bに示す。
【0026】
距離を計算するために、領域が、点が反時計回り順に指定された凸多角形であると仮定する。ステップは以下の通りである。各多角形セグメントについて、dを決定する。
v=pi×pi+1
d=v・p
各多角形セグメントについて、Pnext、Pcurrentに対応するdnext、dcurrentを定義する。
【0027】
dnext、dcurrent<0である場合=>セグメントは外側にあるので、終了する
そうではなく、dnext<0、dcurrent>0である場合=>Pnextをクリップする
そうではなく、dnext>0、dcurrent<0である場合=>Pcurrentをクリップする
上式で、pnextに対するクリップ関数は、
【0028】
【数1】
各多角形に対してルートセグメントを処理した後、多角形と元のルートセグメントの共通部分(Δs1)は、
【0030】
【数2】
危険コストは、危険中の距離(Δs1)とステップ距離との比でスケーリングされる。
【0032】
【数3】
燃料コストおよび時間コスト:燃料コストおよび時間コストは、航空機の最適巡航性能条件から決定される。2つの異なるタイプの巡航性能が存在する。危険エリアが存在しない場合、巡航コスト関数を最適化するために巡航高度および巡航速度が自由に選ばれる。危険エリアが存在する場合、巡航高度、例えば危険エリアの頂部高度または底部高度を指定することができる。したがって、2つの可能な巡航解のタイプが存在する。1)条件のない巡航:高度が自由に選ばれる、2)条件付き高度巡航:高度が指定される。
【0034】
巡航の際には、コスト積分(C)が最小限に抑えられる。
【0035】
【数4】
CIは、(貨幣単位の)時間のコストと、(貨幣単位の)燃料のコストとの比である。コスト指標(CI)を増加させることにより、時間により強い強調を置くことができる。小さいアーク長ステップΔSについて、燃料、時間、およびコスト増分は、
【0037】
【数5】
伝統的に、燃料/時間コストが、単一コスト関数(CF)として組み合わされる。
CF=(FFR+CI)/V
この場合、ΔCost=CFΔs
燃料/時間巡航性能解が、航空機製造業者によって事前計算され、次いでユーザに対して、重量、コスト指数、風速、および高度の各パラメータの関数としてテーブル内に供給される。この2つのタイプの巡航モデルは、
高度制限のない巡航:高度の指定なし
【0039】
【数6】
高度制限のある巡航:高度の指定あり
【0041】
【数7】
航空機が自由巡航しているときは、高度制限のない解が使用される。航空機が自由巡航高度より上または下の高度で飛行することを余儀なくされるとき、高度制限のある解が使用される。上記のモデルは、フライト管理システムで使用される典型的なものである。
【0043】
上空通過料金:一般には、上空通過料金は、重量、移動距離、およびレート(距離当たりのコスト)に依存する。上空通過料金は、国ごとに別々に計算される。一部の料金タイプは固定レートであり、重量の関数であり、重量、距離、およびレートの関数であり、以下は、使用されるいくつかの公式である。
【0044】
公式#1(ユーロコントロールの国々およびその他の国々)
【0045】
【数8】
上式で、
R=料金
T=単位レート
Dge=飛行した大圏距離
W=メートルトン単位の最大離陸重量(MTOW)
公式#2(ASECNAの国々)
R=単位レート×係数(表1から決定)
【0047】
【表1】
距離は、実際の飛行した距離、あるいは入口点と、目的地の国の空港、すなわち出口点との間の大圏距離、あるいは起点の国の空港と、国の出口点との間の大圏距離でよい。移動した距離と大圏距離の差を図7に示す。国境は、政治的境界、ATCフライト情報領域(FIR)、または両者の組合せである。
【0049】
大圏距離を計算するために、国の入口点および出発点によって定義される大圏の平面上へのステップ距離(ΔS)の射影が使用される(図8参照)。入口点(Re)および出発点(Rd)を含む平面に対する法線は、
【0050】
【数9】
地球中心座標系でのnの各成分が、x軸が地球から外に向く現時点の座標系まで回転する。
nR=T(φ,θ)ne
次に、現地点R、(n1 ―)(n1 ―はn1の頭上にーが付された記号を示す)での地方垂直線上へのnの射影が、Rでのn1 ―の垂直成分をゼロに設定することによって求められる。
【0052】
【数10】
次いでΔSの射影は、
【0054】
【数11】
距離因子が大圏距離であるとき、上空通過コストを計算するために軌跡の反復が必要である。最初の反復時に、実行中、距離に関して大圏距離ではなくアーク長が使用される。やはり最初の反復時に、国の入口点および出発点が、リトレース中の実行の終りに計算される。後続の反復では、先のパスからの国の入口点および出発点が、大圏距離の計算で使用される。
【0056】
反復プロセスの収束の助けとなるように、最初の反復の後に、ルートを決定する探索の領域が、図9Aおよび図9Bに示すように先のルートの周りの領域に限定される。
地点が領域内にあるかどうかを決定するのに以下の式が使用される。地球座標での入口点と出発点との間の距離は、
ΔRpx=Rdx−Rex
ΔRpy=Rdy−Rey
ΔRpz=Rdz−Rez
地方垂直線座標系での相対距離は、
ΔRx=cosφcosθΔRex+cosφsinθΔRey+sinφΔRez
ΔRy=sinθΔRex+cosθΔRey
ΔRz=−sinφcosθΔRex−cosφsinθΔRey+cosφΔRez
地方垂直線座標系と、y軸が大圏に沿う座標系との間の角度は、
【0057】
【数12】
探索領域は以下によって定義される。
ymax=cosφΔRy+sinΨΔRz+2k
zmax=500nm
k=100nm
地球座標系での入口点から測定した現相対位置の成分は、
ΔRpx=Rpx−Rex
ΔRpy=Rpy−Rey
ΔRpz=Rpz−Rez
地方垂直線座標系での現相対位置(ΔRp)の成分は、
ΔRpx=cosφcosθΔRpex+cosφsinθΔRpey+sinφΔRpez
ΔRpy=sinθΔRpex+cosθΔRpey
ΔRpz=−sinφcosθΔRpex−cosφsinθΔRpey+cosφΔRpez
回転後座標系での現相対位置は、
y=cosΨΔRpy+sinΨΔRpz
z=−sinΨΔRpy+cosΨΔRpz
yでのz境界点は、
【0059】
【数13】
点(y,z)が探索領域内にあるかどうかを決定するのに以下の式を使用する。
if(z≦z1かつz≧z2) then 領域内にあり、
sf=1.05Δsp/Δs ; if (sf≧1) sf=1 ; sf=目盛係数
else 領域外にあり、then
sf=10
end
上空通過料金計算で使用される距離は、目盛係数にステップ距離を掛けたものである。
d=sfΔS
したがって、領域外にいることに対して大きなペナルティがある。
【0061】
1.2 4次元(4D)動的プログラミングルートソルバ
以下では、4次元(緯度、経度、高度、および時間)ルートソルバを説明する。まず、3次元動的プログラミングルートソルバを説明し、次いで、複数点所要到着時間(RTA)関数を説明する。
【0062】
動的プログラミング(DP)方法では、コスト関数を最小限に抑えるのに3Dグリッド探索が実施される。DP解公式は、1組の状態遷移式と、コスト関数を最小限に抑えるための帰納式からなる。DP式の一般形は、
状態遷移
θk+1=θk+Δθ
φk+1=φk+Δφ
hk+1=hk+Δh
帰納的コスト
【0063】
【数14】
Δφ,Δθ,Δh=管理
水平軸では固定パターン探索を使用するが、垂直軸では、計算の数を低減するために適応探索を使用る。
【0065】
計算は起点で始まり、目的地で終了する。これにより、針路および速度を使用して危険位置を時間における前方に伝播することが可能となる。重量を含む状態条件が既知であるので、起点での開始により、フライト中のルートの再計算も可能となる。
【0066】
3次元グリッドおよびグリッドポイント間の遷移タイプを図10A、10B、10C、および10Dに示す。起点および目的地点は、図10Aの3次元グリッド内に含まれる。図10Bでは、11個の潜在的横方向ステップが示されている。別の実施形態では、より少数または多数の潜在的ステップを探索することができ、目的地から離れる方向であっても探索することができる。図示するように、各ステップの距離は、移動するグリッドポイントに依存する。図10Cでは、ノードからの5個の異なる垂直ステップが示されている。より少ない数を探索することもできる。図10Dは、水平ステップすなわち横方向ステップと垂直ステップの組合せの図形表現である。
【0067】
DPプロセスの例示を図11および12に示す。図11では、水平軸でのプロセスの第1および第2ステージが示されている。この例では、各進入向首方向について、9つの出口向首方向が存在する。図12に示すように、各水平遷移について、いくつかの垂直遷移が調査される。水平遷移と同様に、垂直遷移は所定ではなく、位置および危険セルの数に依存する。すなわち、垂直探索は、その前の状態にそれ自体を適合させる。この適応探索手法により、実行しなければならない計算の数が低減される。
【0068】
垂直遷移高度は、重複する危険の異なる構成に対して異なる。高度割当ては、複数の危険セルに対する条件のない巡航高度の位置に依存する。まず、条件のない巡航高度の位置を見つけ、次いでその位置に応じて、他の遷移高度を、危険セルの頂部および底部に割り当てる。図12に示すこの例では、条件のない巡航高度が、天候セルの間にある。この場合、巡航高度が高度h(1)に割り当てられ、セル(1)の頂部が高度h(2)に割り当てられ、セル(2)の底部がh(3)に割り当てられる。
【0069】
現ステップでは、増分遷移コストが計算される。遷移コストは、燃料、時間、上空通過料金のコストと、そのステップで危険を通過する場合の危険コストとを含む。垂直遷移が天候を通過するかどうかを決定するために、2点間の危険セルの間にホールが存在するかどうかが決定される。2つの危険がある構成についてのホール計算の一例を図13Aおよび図13Bに示す。図13Aに、荒天のノードから荒天でないノードへの遷移を示す。図13Bに、経路が荒天を横切らない、荒天でない2点間の遷移を示す。
【0070】
以下の論理により、ホールが存在するか否かおよびホールサイズが決定される。まず、以前の高度の周囲の空間に対する高度の上界および下界がグリッドポイントで可能され、現地点の周囲の空間に対する上界および下界も計算される。次いで、以下が計算される。
【0071】
a)荒天での以前の高度(図13A参照)
i=遷移する高度(i=1,jvlevels)
h(k0)<hupper(i)かつh(k0)>hlower(i)である場合、ホールが存在する
holesize=hupper(i)−hlower(i)
b)荒天でない以前の高度(図13B参照)
if(hupper0<hupper(i))then
holehigh=hupper0
else
holehigh=hupper(i)
endif
if(hlower0<hlower(i))then
holelow=hlower0
else
holelow=hlower(i)
endif
holesize=hhigh−hlow
c)ホールの存在
holesize>1000ft.(304.8メートル)である場合、ホールが存在する
ホールが存在する場合、遷移は荒天を通過しない。その場合遷移コストは、
ΔC=(Δfuel+CIΔt)hfree ;非制限巡航へ移行し且つ危険に遭遇しない場合
ΔC=(Δfuel+CIΔt)hfree+Δhazard ; 非制限巡航へ移行し且つ危険に遭遇する場合
ΔC=(Δfuel+CIΔt)hspecified ; 制限巡航へ移行し且つ危険に遭遇しない場合
ΔC=(Δfuel+CIΔt)hspecified +Δhazard ; 制限巡航へ移行し且つ危険に遭遇する場合
最後に、合計累積コストをコスト再帰公式
C(ip,jp,kp)=C(i0,j0,k0)+ΔC
から計算する。
【0072】
先に地点に達した場合、以前のコストを現コストと比較する。合計現コストがノードに格納された合計コストよりも低い場合、その新しいコスト、進入方向、高度、重量、時間、hupper、hlowerがグリッド位置ip,jp,kpに格納される。遷移高度に対応する高度グリッドポイント位置(kp)は、
kp=整数(h(kv)/Δh+.5)
上式で、
kv=垂直遷移数(図12の例示ではkv=1,3)
各グリッド点に格納される量は、
C(ip,jp,kp)=C(i0,j0,k0)+ΔC
hor_entry(ip,jp,kp)=entry_direction
vert_entrydirection(ip,jp,kp)=kp−k0
weight(ip,jp,kp)=weight(i0,j0,k0)−Δw
time(ip,jp,kp)=time(i0,j0,k0)−Δt
h(ip,jp,kp)=h(kv)
hupper(ip,jp,kp)=hupper(kv)
hlower(ip,jp,kp)=hlower(kv)
高度グリッドがいくつかの離散的レベルに量子化される場合であっても、実際の高度(例えば条件なし巡航高度)が離散的位置に格納され、取り出すことができるので、それがより正確にわかることに留意されたい。
【0073】
複数のRTA(所要到着時間)関数が、軌跡に沿う複数の地点での到着時間に適合する軌跡を計画する。複数のRTAの手法は、順次式の手法である。まず、第1の都市での到着時間に適合する軌跡を計算する。次に、後続の各都市または位置への到着時間に適合する軌跡を決定する。各地点でのRTAが、現地点と次の地点の間の軌跡反復によって達成される。最初の反復時に、コスト指標を選択する。第1軌跡を計算した後、到着時間誤差を計算し、コスト指標を到着時間誤差と共に変更し、軌跡を再計算する。
【0074】
CIi+1=CIi+KΔTi
次の地点での所望の到着時間を達成した後、後続の各地点についてプロセスを反復する。次のシーケンスの開始に関する重量および時間の初期条件は、先のプロセスの終了時の重量および時間である。順次データを合計し、燃料使用料および平均速度を決定する。
【0075】
RTAウィンドウ関数は、最も早い可能な到着時間および最も遅い可能な到着時間を決定する。最も早い到着時間は、CI=CImaxに設定することによって求められる。最も遅い到着時間は、CIを最大航続時間値(CImin)に設定することによって求められる。この設定でフライトを計算し、次いで、残りの燃料が予備レベルに達するまでフライトの延長をシミュレーションする。この延長巡航により、待機経路または別のルート延長操作で使用される燃料および時間が推定される。
【0076】
結論
このルートソルバは、航空便の運航管理者またはパイロットがルートを計画する助けとなる。一般には、フライトを計画するとき、パイロットまたは運航管理者は、燃料、時間、および上空通過料金を最小限に抑え、厳しい天候(対流、乱気流、および着氷)、特別用途空域、火山灰、環境的および政治的に微妙な領域などの危険領域を回避することを望む。ルート決定問題を図14に示す。燃料/時間性能を最良にするために、最良のルートは、風プロファイルをたどることができ、危険領域の周囲、上、または下を飛行することができる。
【0077】
以下の様々な目標のうち1つまたは複数を満たすルートが発見される。
・燃料を最小限に抑える
・時間または時間ウィンドウを満たし、またはフライト時間を最小限に抑える
・厳しい天候の領域を回避する
・特別用途空域、火山灰、環境的に微妙な領域などの他の危険領域を回避する
・政治的に微妙な領域を回避する
・非常時にフライトを最も近い空港または望ましい空港にルート変更する
コスト関数に危険コストを含めることにより、危険範囲が探索エリア全体にわたる場合であっても解が保証される。起点から開始し、目的地まで進むことにより、危険位置を時間的に前方に射影することができ、より良好な解が得られる。
【図面の簡単な説明】
【0078】
【図1】ルートオプティマイザのブロック図である。
【図2】図1のルートオプティマイザに関するユーザインターフェースのコンピュータスクリーンショットである。
【図3A】頂部高度および底部高度を有する多角形によって表される危険な天候の3次元表現を示すプロットである。
【図3B】図3Aの多角形の頂部高度および底部高度を示すプロットである。
【図4】針路および方向を有する天候を示すプロットである。
【図5】多角形境界で定義された危険領域を示すNCARグレーデッドデータのコンピュータスクリーンショットである。
【図6A】危険エリア内の水平ステップの長さを決定する方法の3次元グラフ表現である。
【図6B】危険エリア内の水平ステップの長さを決定する方法の2次元グラフ表現である。
【図7】入口点および出口点を有する国境を超えるフライト経路の表現である。
【図8】大圏平面上のステップ距離の射影である。
【図9A】軌跡反復に関する収束領域のグラフ表現である。
【図9B】軌跡反復に関する収束領域のグラフ表現である。
【図10A】ルートオプティマイザによって使用されるノードの3次元グリッドの表現である。
【図10B】所与のノードから調査すべき横方向ステップのグラフ表現である。
【図10C】所与のノードから調査すべき垂直ステップのグラフ表現である。
【図10D】所与のノードから調査すべき合成横方向/垂直ステップのグラフ表現である。
【図11】横方向経路を決定するのに使用される反復的プロセスのグラフ表現である。
【図12】荒天を通る様々なタイプの遷移のグラフ表現である。
【図13A】荒天の高度からの遷移のグラフ表現である。
【図13B】荒天でない高度からの遷移のグラフ表現である。
【図14】危険、国上空通過料金、およびウインドフィールドを示すルート計画に対する幾何形状の3次元表現である。
Claims (26)
- 起点から開始し、前記起点から実現可能な各セグメントの終点までの複数の実現可能なセグメントを決定するステップと、
危険エリアの3次元表現の関数に応じて高度を変更するステップと、
前記ノードから別のセグメントを反復的に決定し、前記起点と前記目的地との間の複数のセグメント経路を作成するステップと、
最小コストを有する、前記起点と目的地との間のセグメント経路を決定するステップと、
を含む起点と目的地の間のルートを決定する方法。 - 危険エリアは、横方向平面および高さ内の頂点を有する多角形によって表される、請求項1に記載の方法。
- 前記危険エリアは、異なる高さを有する複数の多角形によって表される請求項1に記載の方法。
- 前記危険エリアは速度ベクトルと関連付けられる、請求項2に記載の方法。
- 前記危険エリアは、天候の危険、火山灰、特殊用途空域、および政治的に微妙な領域からなるグループから選択される、請求項1に記載の方法。
- 前記危険エリアは、前記セグメント経路の決定中に速度ベクトルに従って移動する、請求項1に記載の方法。
- 起点ノードを受け取るステップと、
前記起点ノードから隔てて位置する目的地ノードを受け取るステップと、
前記起点ノード、前記目的地ノード、および複数のルートノードを含むグリッドを作成するステップと、
前記目的地ノードおよび前記複数のルートノードへ遷移するコストを決定するステップと、
3次元危険エリアに応じて前記高度を変更するステップと、
前記複数のルートノードからノードのサブセットを選択するステップと、を含み、
前記各ノードは複数の高度を有し、前記ノードのサブセットは、前記起点ノードから前記目的地ノードへの遷移の最小合計コストを有する、
ルートを決定する方法。 - 前記起点ノードを受け取るステップは、グローバル座標で表現された起点ノードを受け取るステップを含み、前記目的地ノードを受け取るステップは、グローバル座標で表現された目的地ノードを受け取るステップを含み、
前記起点ノードの前記グローバル座標を、前記起点が赤道上となる座標系に変換するステップと、
前記目的地ノードの前記グローバル座標を、前記目的地が赤道上となる座標系に変換するステップとをさらに含む、請求項7に記載の方法。 - 前記コストを決定するステップは、燃料に関する因子を含むコスト関数を評価するステップを含む、請求項7に記載の方法。
- 前記遷移するコストを決定するステップは、時間、上空通過料金、および危険コストのグループから選択された因子を含むコスト関数を評価するステップを含む、請求項7に記載の方法。
- 前記複数のルートノードからノードのサブセットを選択するステップは、各ノードから複数の後続ノードそれぞれに遷移するコストを反復的に計算するステップを含む、請求項7に記載の方法。
- 起点ノードを受信するステップと、
前記起点ノードから離れた目的地ノードを受け取るステップと、
前記起点ノードからそれぞれ始まり、前記目的地ノードで終了し、1つまたは複数の中間ノードを横切る複数の経路を定義するステップと、
横方向次元および垂直次元で定義される危険に応答して、様々な高度で別の中間ノードを定義するステップと、
様々な高度で定義される前記中間ノードを使用する別の経路定義するステップと、
前記複数の経路それぞれを横切ることに関連するコストを決定するステップと、
所定のコスト関数を満たす経路を選択するステップと、
を含む横方向ルートおよび垂直ルートを選択する方法。 - 前記複数の経路を定義するステップは、複数の中間ノードを定義するステップを含む、請求項12に記載の方法。
- 前記所定のコスト関数を満たす経路を選択するステップは、前記目的地ノードに到着する最小コストを有する経路を選択するステップを含む、請求項12に記載の方法。
- 前記所定のコスト関数を満たす経路を選択するステップは、前記目的地ノードへの所要到着時間を満たす経路を選択するステップを含む、請求項12に記載の方法。
- 前記所定のコスト関数を満たす経路を選択するステップが、前記目的地ノードへの所要到着時間を満たす経路を選択するステップを含み、前記所要到着時間の達成が、前記コスト関数を反復的に調節するステップを含む請求項12に記載の方法。
- ビークルがルートに沿って移動するときの変数を考慮したビークルに関して起点と目的地の間のルートを決定する方法であって、
前記起点および目的地を包含する3次元グリッドで複数のノードを確立するステップと、
前記起点ノードから開始し、前記ビークルを前記起点ノードに近接する複数のノードに移動するコストを決定するステップと、
前記複数のノードから、別の複数のノードに移動する遷移コストを前記変数の関数として求めるステップと、
3次元危険エリアに応答して高度を変更するステップと、
前記ノードからの別のコストを反復的に求め、前記起点と前記目的地との間の複数のルートを作成するステップと、
を含む方法。 - 前記起点から前記各ノードへの合計コストを追跡するステップをさらに含み、前記ノードについてのコストは前のノードから決定される、請求項17に記載の方法。
- 前記ノードに到達する合計コストが前記ノードに到達する前の合計コストよりも小さい場合にのみ、先に到達したノードから別のノードに移動するコストの決定を反復するステップをさらに含む、請求項18に記載の方法。
- 起点から開始し、実現可能な各セグメントの終点までの複数の実現可能なセグメントを決定する手段と、
危険エリアの3次元表現に応じて高度を変更する手段と、
前記ノードから別のセグメントを反復的に求め、前記起点と前記目的地との間の複数のセグメント経路を作成する手段と、
最小コストを有する、前記起点と目的地との間のセグメント経路を決定する手段と、
を含む起点と目的地の間のルートを決定するシステム。 - 危険エリアは、横方向平面および高さ内の頂点を有する多角形によって表される、請求項20に記載のシステム。
- 前記危険エリアは、異なる高さを有する複数の多角形によって表される請求項21に記載のシステム。
- 前記危険エリアは速度ベクトルと関連付けられる、請求項21に記載のシステム。
- 前記危険エリアは、天候の危険、火山灰、特殊用途空域、および政治的に微妙な領域からなるグループから選択される、請求項20に記載のシステム。
- 前記危険エリアは、前記セグメント経路の決定中に速度ベクトルに従って移動する、請求項20に記載のシステム。
- 再帰的アルゴリズムを実装して水平経路を決定するモジュールと、
適応アルゴリズムを実装して、頂部高度および底部高度を有する水平多角形によって表される危険エリアに基づいて調節される垂直経路を決定するモジュールと、
を備えるルートプランナ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/957,416 US20030093219A1 (en) | 2001-09-20 | 2001-09-20 | Four-dimensional route planner |
| PCT/US2002/029474 WO2003025507A2 (en) | 2001-09-20 | 2002-09-17 | Four-dimensional route planner |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005504274A true JP2005504274A (ja) | 2005-02-10 |
| JP2005504274A5 JP2005504274A5 (ja) | 2006-01-05 |
Family
ID=25499537
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003529091A Pending JP2005504274A (ja) | 2001-09-20 | 2002-09-17 | 4次元ルートプランナ |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US20030093219A1 (ja) |
| EP (1) | EP1427991A2 (ja) |
| JP (1) | JP2005504274A (ja) |
| KR (1) | KR20040033068A (ja) |
| CA (1) | CA2461134A1 (ja) |
| IL (1) | IL160986A0 (ja) |
| NO (1) | NO20041526L (ja) |
| NZ (1) | NZ532117A (ja) |
| WO (1) | WO2003025507A2 (ja) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009502651A (ja) * | 2005-08-04 | 2009-01-29 | ザ・ボーイング・カンパニー | 自動燃料供給情報追跡および燃料ヘッジ |
| WO2010110079A1 (ja) * | 2009-03-25 | 2010-09-30 | 三洋電機株式会社 | 車載用電子機器 |
| JP2011143774A (ja) * | 2010-01-13 | 2011-07-28 | Japan Aerospace Exploration Agency | 乱気流回避操縦支援装置 |
| JP2012158322A (ja) * | 2011-01-28 | 2012-08-23 | Boeing Co:The | 航空機の飛行経路を予測するためのデータの供給 |
| JP2014016264A (ja) * | 2012-07-10 | 2014-01-30 | Fuji Heavy Ind Ltd | 回避経路導出装置、回避経路導出プログラム、および、回避経路導出方法 |
| JP2017181185A (ja) * | 2016-03-29 | 2017-10-05 | 株式会社ゼンリンデータコム | ルート探索装置、ルート探索方法、及びプログラム |
| JPWO2019167161A1 (ja) * | 2018-02-28 | 2021-02-25 | 日本電気株式会社 | 領域評価システム、方法およびプログラム |
| WO2023112245A1 (ja) * | 2021-12-16 | 2023-06-22 | 日本電気株式会社 | 管理装置、管理方法、及びコンピュータ読み取り可能な記憶媒体 |
| JP7459009B2 (ja) | 2021-02-12 | 2024-04-01 | 三菱重工業株式会社 | 経路計画装置、移動体、経路計画方法及びプログラム |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8560223B2 (en) | 2002-08-29 | 2013-10-15 | Mapquest, Inc. | Automated route determination |
| US7133771B1 (en) * | 2002-08-29 | 2006-11-07 | America Online, Inc. | Automated route determination to avoid a particular maneuver |
| US7474960B1 (en) * | 2002-12-30 | 2009-01-06 | Mapquest, Inc. | Presenting a travel route |
| US7818116B1 (en) | 2002-12-30 | 2010-10-19 | Mapquest, Inc. | Presenting a travel route in a ground-based vehicle |
| US7321824B1 (en) * | 2002-12-30 | 2008-01-22 | Aol Llc | Presenting a travel route using more than one presentation style |
| DE102004006486A1 (de) * | 2004-02-10 | 2005-08-25 | Köhler, Hans Christian, Dipl.-Math. | Flugkontrollsystem zur Sicherung der Großluftfahrt gegen Kollisionen und ein weites Spektrum des Mißbrauchs |
| US7366591B2 (en) * | 2004-06-21 | 2008-04-29 | Honeywell International, Inc. | System and method for vertical flight planning |
| US7966003B2 (en) * | 2004-07-09 | 2011-06-21 | Tegic Communications, Inc. | Disambiguating ambiguous characters |
| US20060161337A1 (en) * | 2005-01-19 | 2006-07-20 | Ping-Chung Ng | Route planning process |
| US20090177339A1 (en) * | 2005-03-03 | 2009-07-09 | Chen Robert H | Optimization and Mechanization of Periodic Flight |
| US7606641B2 (en) | 2005-08-04 | 2009-10-20 | The Boeing Company | Fuel consumption data tracking/collection and aircraft/route optimization |
| EP1770365B1 (en) * | 2005-09-30 | 2011-11-16 | Saab Ab | Method for planning the velocity of a craft along a route |
| JP4743275B2 (ja) | 2006-03-01 | 2011-08-10 | トヨタ自動車株式会社 | 自車進路決定方法および自車進路決定装置 |
| NZ544381A (en) * | 2006-03-02 | 2008-10-31 | Airways Corp Of New Zealand | System and method for modelling a flight and invoicing the flight providers for services used |
| FR2907952B1 (fr) * | 2006-10-26 | 2008-12-19 | Airbus France Sa | Procede et dispositif d'aide au guidage d'un aeronef le long d'une trajectoire de vol. |
| FR2913780B1 (fr) * | 2007-03-13 | 2014-07-18 | Airbus France | Procede et dispositif d'aide au guidage d'un aeronef |
| US7925393B2 (en) * | 2007-08-01 | 2011-04-12 | Arinc Incorporated | Method and apparatus for generating a four-dimensional (4D) flight plan |
| WO2009052404A1 (en) * | 2007-10-17 | 2009-04-23 | Lockheed Martin Corporation | Hybrid heuristic national airspace flight path optimization |
| US20090112645A1 (en) * | 2007-10-25 | 2009-04-30 | Lockheed Martin Corporation | Multi objective national airspace collaborative optimization |
| US9257047B2 (en) * | 2007-12-12 | 2016-02-09 | The Boeing Company | Computation of new aircraft trajectory using time factor |
| US8082102B2 (en) * | 2008-01-14 | 2011-12-20 | The Boeing Company | Computing flight plans for UAVs while routing around obstacles having spatial and temporal dimensions |
| US9513125B2 (en) * | 2008-01-14 | 2016-12-06 | The Boeing Company | Computing route plans for routing around obstacles having spatial and temporal dimensions |
| US8864606B2 (en) * | 2008-06-27 | 2014-10-21 | The Invention Science Fund I, Llc | Sports applications for wind profile systems |
| US20090326894A1 (en) * | 2008-06-27 | 2009-12-31 | Chan Alistair K | Methods of processing wind profile information in sports applications |
| US9733392B2 (en) * | 2008-06-27 | 2017-08-15 | Deep Sciences, LLC | Methods of using environmental conditions in sports applications |
| US20090326887A1 (en) * | 2008-06-27 | 2009-12-31 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Wind profile systems for sporting applications |
| WO2010076045A1 (en) * | 2008-12-29 | 2010-07-08 | Tomtom International B.V. | Timed route navigation device |
| US20100211302A1 (en) * | 2008-12-30 | 2010-08-19 | Thales-Raytheon Systems Company Llc | Airspace Deconfliction System |
| DE102009006409B4 (de) * | 2009-01-28 | 2012-10-31 | Eads Deutschland Gmbh | Verfahren und Vorrichtung zur Wegstreckenoptimierung |
| US8386098B2 (en) * | 2009-08-03 | 2013-02-26 | David A. Bailey | Method for a deeper search in a time-limited image satellite planning environment |
| EP2559018A4 (en) * | 2010-04-12 | 2014-01-08 | Flight Focus Pte Ltd | ONBOARD FLIGHT PLAN SETUP SYSTEM |
| US8842995B2 (en) | 2010-05-11 | 2014-09-23 | The Invention Science Fund I, Llc | Optical power transmission systems and methods |
| US9761148B2 (en) | 2010-08-03 | 2017-09-12 | Honeywell International Inc. | Airborne separation assurance system and required time of arrival function cooperation |
| US8406939B2 (en) * | 2010-09-03 | 2013-03-26 | Honeywell International Inc. | Systems and methods for RTA control of multi-segment flight plans with smooth transitions |
| ITRM20110651A1 (it) * | 2010-12-20 | 2012-06-21 | Selex Sistemi Integrati Spa | Metodo di previsione rapida del profilo verticale della traiettoria per la gestione del traffico aereo, e relativo sistema atm. |
| US9086280B2 (en) | 2011-09-07 | 2015-07-21 | Honeywell International Inc. | Aircraft display systems and methods with flight plan deviation symbology |
| US10013236B2 (en) * | 2013-03-06 | 2018-07-03 | The Boeing Company | Real-time adaptive speed scheduler |
| FR3012245B1 (fr) * | 2013-10-21 | 2019-05-24 | Thales | Procede et dispositif de determination d'une pluralite d'indicateurs de performance relatifs au vol d'un aeronef, et produit programme d'ordinateur associe |
| US20150127302A1 (en) * | 2013-11-07 | 2015-05-07 | The Government Of The United States As Represented By The Secretary Of The Army | Method and apparatus for optimized routing |
| US9620022B2 (en) | 2014-06-10 | 2017-04-11 | Sikorsky Aircraft Corporation | Aircraft motion planning method |
| FR3029652B1 (fr) * | 2014-12-03 | 2019-12-27 | Thales | Procede de calcul de trajectoire d'avion soumise a des contraintes laterales et verticales |
| WO2016095983A1 (en) * | 2014-12-17 | 2016-06-23 | Here Global B.V. | Providing constraint to a position |
| FR3032271B1 (fr) * | 2015-01-30 | 2017-01-13 | Thales Sa | Procede d'amelioration d'une trajectoire de vol d'un aeronef en fonction de conditions meteorologiques |
| US10144505B2 (en) * | 2015-05-18 | 2018-12-04 | The Boeing Company | Aircraft flight control using a required time of arrival index |
| US9870711B2 (en) * | 2015-06-08 | 2018-01-16 | The Boeing Company | System and method for determining an alternative flight route based on sector geometry |
| EP3211620A1 (en) | 2016-02-26 | 2017-08-30 | The Boeing Company | Method and electronic device for establishing optimized holding patterns for aircraft |
| US10262545B2 (en) | 2016-04-18 | 2019-04-16 | Sikorsky Aircraft Corporation | Optimal flight planner |
| US10459078B2 (en) * | 2016-09-13 | 2019-10-29 | Honeywell International Inc. | Reliability index for weather information |
| KR102340384B1 (ko) * | 2017-03-30 | 2021-12-16 | 한국전자통신연구원 | 무인 배송 운영 방법 및 장치 |
| US10509418B1 (en) * | 2017-08-09 | 2019-12-17 | Rockwell Collins, Inc. | * Theta* merged 3D routing method |
| US10777085B2 (en) | 2018-04-05 | 2020-09-15 | GE Aviation Sytems LLC | Efficient flight profiles with multiple RTA constraints |
| CN109828599B (zh) * | 2019-01-08 | 2020-12-15 | 苏州极目机器人科技有限公司 | 飞行器作业路径规划方法以及控制装置和控制设备 |
| US20200286388A1 (en) * | 2019-03-08 | 2020-09-10 | Here Global B.V. | Method and apparatus for visualizing risk levels associated with aerial vehicle flights |
| US20210110444A1 (en) * | 2019-10-09 | 2021-04-15 | The Boeing Company | Flight route options determination systems and methods |
| US20220026222A1 (en) * | 2020-07-24 | 2022-01-27 | Bayerische Motoren Werke Aktiengesellschaft | Method, Machine Readable Medium, Device, and Vehicle For Determining a Route Connecting a Plurality of Destinations in a Road Network, Method, Machine Readable Medium, and Device For Training a Machine Learning Module |
| US11727816B2 (en) | 2020-09-04 | 2023-08-15 | Ge Aviation Systems Llc | Systems and methods for automatic flight pattern recognition |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2723219B1 (fr) * | 1984-07-13 | 1997-01-24 | Dassault Electronique | Procede et dispositif de commande automatique d'un aeronef en survol a basse altitude |
| US4812990A (en) * | 1987-04-29 | 1989-03-14 | Merit Technology Incorporated | System and method for optimizing aircraft flight path |
| US6085147A (en) * | 1997-09-26 | 2000-07-04 | University Corporation For Atmospheric Research | System for determination of optimal travel path in a multidimensional space |
| US6266610B1 (en) * | 1998-12-31 | 2001-07-24 | Honeywell International Inc. | Multi-dimensional route optimizer |
| US6421603B1 (en) * | 1999-08-11 | 2002-07-16 | Honeywell International Inc. | Hazard detection for a travel plan |
-
2001
- 2001-09-20 US US09/957,416 patent/US20030093219A1/en not_active Abandoned
-
2002
- 2002-09-17 JP JP2003529091A patent/JP2005504274A/ja active Pending
- 2002-09-17 EP EP02778270A patent/EP1427991A2/en not_active Withdrawn
- 2002-09-17 IL IL16098602A patent/IL160986A0/xx unknown
- 2002-09-17 KR KR10-2004-7004147A patent/KR20040033068A/ko not_active Application Discontinuation
- 2002-09-17 WO PCT/US2002/029474 patent/WO2003025507A2/en not_active Application Discontinuation
- 2002-09-17 CA CA002461134A patent/CA2461134A1/en not_active Abandoned
- 2002-09-17 NZ NZ532117A patent/NZ532117A/en unknown
-
2004
- 2004-04-15 NO NO20041526A patent/NO20041526L/no unknown
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009502651A (ja) * | 2005-08-04 | 2009-01-29 | ザ・ボーイング・カンパニー | 自動燃料供給情報追跡および燃料ヘッジ |
| WO2010110079A1 (ja) * | 2009-03-25 | 2010-09-30 | 三洋電機株式会社 | 車載用電子機器 |
| CN102362154A (zh) * | 2009-03-25 | 2012-02-22 | 三洋电机株式会社 | 车载用电子设备 |
| JP2011143774A (ja) * | 2010-01-13 | 2011-07-28 | Japan Aerospace Exploration Agency | 乱気流回避操縦支援装置 |
| JP2012158322A (ja) * | 2011-01-28 | 2012-08-23 | Boeing Co:The | 航空機の飛行経路を予測するためのデータの供給 |
| JP2014016264A (ja) * | 2012-07-10 | 2014-01-30 | Fuji Heavy Ind Ltd | 回避経路導出装置、回避経路導出プログラム、および、回避経路導出方法 |
| JP2017181185A (ja) * | 2016-03-29 | 2017-10-05 | 株式会社ゼンリンデータコム | ルート探索装置、ルート探索方法、及びプログラム |
| JPWO2019167161A1 (ja) * | 2018-02-28 | 2021-02-25 | 日本電気株式会社 | 領域評価システム、方法およびプログラム |
| JP7248008B2 (ja) | 2018-02-28 | 2023-03-29 | 日本電気株式会社 | 領域評価システム、方法およびプログラム |
| US11941994B2 (en) | 2018-02-28 | 2024-03-26 | Nec Corporation | Area evaluation system, method, and recording medium |
| JP7459009B2 (ja) | 2021-02-12 | 2024-04-01 | 三菱重工業株式会社 | 経路計画装置、移動体、経路計画方法及びプログラム |
| WO2023112245A1 (ja) * | 2021-12-16 | 2023-06-22 | 日本電気株式会社 | 管理装置、管理方法、及びコンピュータ読み取り可能な記憶媒体 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1427991A2 (en) | 2004-06-16 |
| NZ532117A (en) | 2005-02-25 |
| CA2461134A1 (en) | 2003-03-27 |
| IL160986A0 (en) | 2004-08-31 |
| WO2003025507A3 (en) | 2003-08-14 |
| US20030093219A1 (en) | 2003-05-15 |
| KR20040033068A (ko) | 2004-04-17 |
| NO20041526L (no) | 2004-06-09 |
| WO2003025507A2 (en) | 2003-03-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2005504274A (ja) | 4次元ルートプランナ | |
| US6266610B1 (en) | Multi-dimensional route optimizer | |
| US8082102B2 (en) | Computing flight plans for UAVs while routing around obstacles having spatial and temporal dimensions | |
| CN106781707B (zh) | 一种针对低空中长距离转场飞行的航迹规划方法 | |
| CN103575269B (zh) | 用于显示用户输入的飞行路径的方法 | |
| US6134500A (en) | System and method for generating optimal flight plans for airline operations control | |
| CA2796923C (en) | Determining landing sites for aircraft | |
| US20130226373A1 (en) | Methods for in-flight adjusting of a flight plan | |
| US6085147A (en) | System for determination of optimal travel path in a multidimensional space | |
| US20080300737A1 (en) | Method and device for calculating a flight plan | |
| US9963247B2 (en) | Method and system for automatic determination of an optimized descent and approach profile for an aircraft | |
| CN111047913B (zh) | 用于优化飞机飞行的垂直剖面图的方法和电子设备 | |
| US20110295501A1 (en) | Method of planning, trajectory computation, predictions and guidance for compliance with an aircraft flypast time constraint | |
| US20090204453A1 (en) | Aircraft flight plan optimization for minimizing emissions | |
| US11195420B2 (en) | Method and system for assisting in the flight management of an aircraft in terms of optimizing the operating costs of said aircraft | |
| CN115204466A (zh) | 一种带通行限制的国际航线航路规划方法 | |
| US10147327B2 (en) | Method for integrating a constrained route(s) optimization application into an avionics onboard system with open architecture of client server type | |
| Girardet et al. | Generating optimal aircraft trajectories with respect to weather conditions | |
| US20210025716A1 (en) | Navigation based on multi-agent interest diffusion | |
| Ramée et al. | Aircraft flight plan optimization with dynamic weather and airspace constraints | |
| KR20230078097A (ko) | 도심항공교통 실증 관리를 위한 디지털 트윈 기술에 기반한 3d 가시화 방법 | |
| Causa et al. | Multi-Objective Modular Strategic Planning Framework for Low Altitude Missions Within the Urban Air Mobility Ecosystem | |
| Devulapalli | An efficient algorithm for commercial aircraft trajectory optimization in the air traffic system | |
| AU2002339939A1 (en) | Four-dimensional route planner | |
| Dancila et al. | New flight plan optimisation method utilising a set of alternative final point arrival time targets (RTA constraints) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050830 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080201 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20080624 |