JP2005294468A - 位置決め装置、露光装置及びデバイス製造方法 - Google Patents
位置決め装置、露光装置及びデバイス製造方法 Download PDFInfo
- Publication number
- JP2005294468A JP2005294468A JP2004106245A JP2004106245A JP2005294468A JP 2005294468 A JP2005294468 A JP 2005294468A JP 2004106245 A JP2004106245 A JP 2004106245A JP 2004106245 A JP2004106245 A JP 2004106245A JP 2005294468 A JP2005294468 A JP 2005294468A
- Authority
- JP
- Japan
- Prior art keywords
- movers
- mover
- auxiliary
- positioning device
- auxiliary moving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images




Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70733—Handling masks and workpieces, e.g. exchange of workpiece or mask, transport of workpiece or mask
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Linear Motors (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
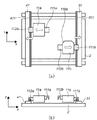
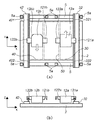
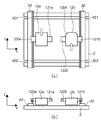
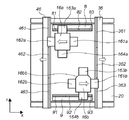
【解決手段】第1、第2領域を含む平面部を有する固定子2と、前記平面部の上で移動する第1、第2可動子11a、11bと、第1、第2可動子11a、11bの位置を規制する規制機構とを備える。第1、第2可動子11a、11bは、固定子2との間に作用するローレンツ力により目標位置に駆動される。前記規制機構は、第1領域内に位置する可動子が目標位置から逸脱しないように該可動子の位置を規制する第1規制部311と、第2領域内に位置する可動子が目標位置から逸脱しないように該可動子の位置を規制する第2規制部411とを含む。
【選択図】図1
Description
前記第2段階では、前記第1、第2補助移動体を前記第1方向に沿って移動させるとともに前記第1、第2補助移動体に設けられた前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第1方向に沿って移動させ、その後、前記第1、第2移動体を静止させ、前記第1、第2固定体に設けられた前記第1、前記第1、第2固定体に設けられた前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第1方向に沿って移動させ、前記第3段階では、前記第1、第2補助移動体を静止させた状態で、前記第1、第2補助移動体に設けられた前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第2方向に沿って移動させることができる。
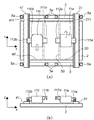
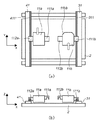
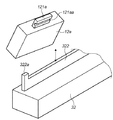
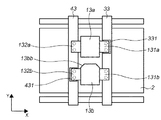
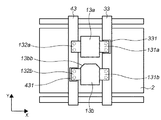
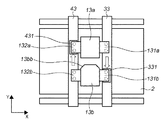
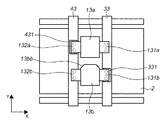
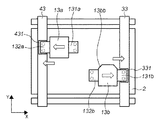
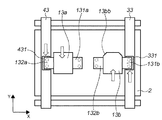
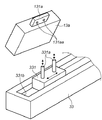
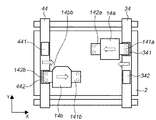
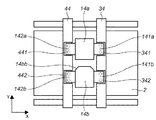
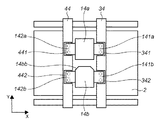
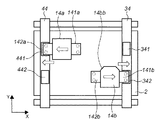
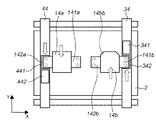
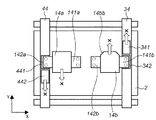
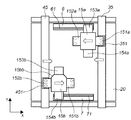
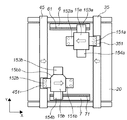
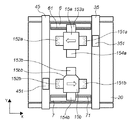
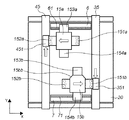
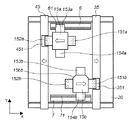
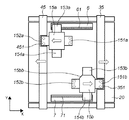
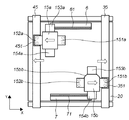
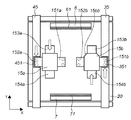
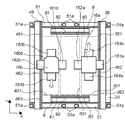
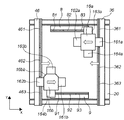
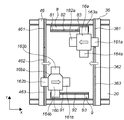
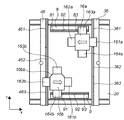
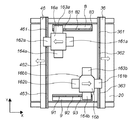
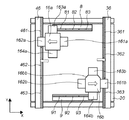
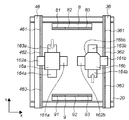
図1〜図6は、本発明の第1実施形態のウエハステージ装置の概略図である。図1〜図6において、(a)は平面図、(b)は側面図であり、ステージの動きを段階を追って示している。
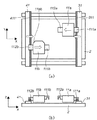
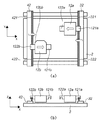
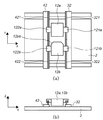
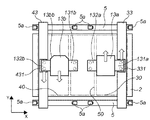
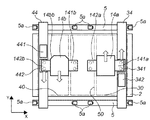
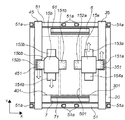
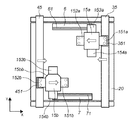
図10〜図15は、本発明の第2実施形態のウエハステージ装置の概略図である。図10〜図15において、(a)は平面図、(b)は側面図であり、ステージの動きを段階を追って示している。図10から図15において、図1から図6に示された符号と同じ符号で示された部分は第1実施形態の構成要素と同じものであるので必要がない限り説明を省略する。
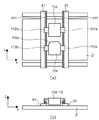
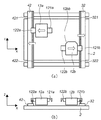
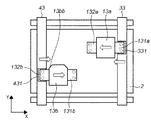
図17〜図24は、本発明の第3実施形態のウエハステージ装置の概略平面図であり、ステージの動きを段階を追って示している。
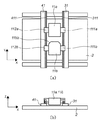
図26〜図32は、本発明の第4実施形態のウエハステージ装置の概略平面図であり、ステージの動きを段階を追って示している。
図33〜図42は、本発明の第4実施形態のウエハステージ装置の概略平面図であり、ステージの動きを段階を追って示している。ウエハステージ装置は、固定子20と、2つの可動子15a、15bを有する。固定子20と可動子15aによって平面モータが構成され、固定子20と可動子15bによって平面モータが構成される。一方の可動子15bには、2個の可動子と補助バーとの組合せを識別するために識別部としてのC面取り部15bbが設けられている。
図43〜図51は、本発明の第6実施形態のウエハステージ装置の概略平面図であり、ステージの動きを段階を追って示している。ウエハステージ装置は、固定子20と、2つの可動子16a、16bを有する。固定子20と可動子16aによって平面モータが構成され、固定子20と可動子16bによって平面モータが構成される。一方の可動子16bには、2個の可動子と補助バー又は固定バーとの組合せを識別するために識別子としてのC面取り部16bbを設けている。
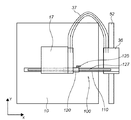
図53は、上記の各実施形態に代表されるツインステージ構成のウエハステージ装置を適用した露光装置の概略構成を示す図である。図53に例示的に示す露光装置は、上記の各実施形態に代表されるウエハステージ装置200を備えている。ここで、ウエハステージ装置200は、平面部を有する固定子SM上に2つのステージ(可動子)ST1、ST2を有し、平面部上で2つのステージST1、ST2を駆動することができる。ステージST1、ST2が平面部上で移動することができる領域には、露光領域と、アライメント領域と、それらの間のスワップ領域を含み、一方のステージが露光領域内で露光に利用されているときに、他方のステージがアライメント領域内でアライメントに利用されることができる。また、2つのステージST1、ST2は、スワップ領域において互いの位置を入れ替えることができる。ステージST1、ST2は、目標位置から逸脱しないように、上記のような係合部及び規制部を含んで構成されうる規制機構によって位置が規制される。正常状態においては、係合部と規制部とが接触することはなく、係合部と規制部とは、ステージST1、ST2が目標位置から逸脱しようとする異常状態において接触し、その逸脱を防止する。
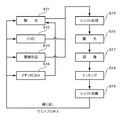
次に上記の露光装置を利用した半導体デバイスの製造プロセスを説明する。図54は、半導体デバイスの全体的な製造プロセスのフローを示す図である。ステップ1(回路設計)では半導体デバイスの回路設計を行なう。ステップ2(マスク作製)では設計した回路パターンに基づいてマスクを作製する。一方、ステップ3(ウエハ製造)ではシリコン等の材料を用いてウエハを製造する。ステップ4(ウエハプロセス)は前工程と呼ばれ、上記のマスクとウエハを用いて、リソグラフィ技術によってウエハ上に実際の回路を形成する。次のステップ5(組み立て)は後工程と呼ばれ、ステップ4によって作製されたウエハを用いて半導体チップ化する工程であり、アッセンブリ工程(ダイシング、ボンディング)、パッケージング工程(チップ封入)等の組立て工程を含む。ステップ6(検査)ではステップ5で作製された半導体デバイスの動作確認テスト、耐久性テスト等の検査を行なう。こうした工程を経て半導体デバイスが完成し、これを出荷(ステップ7)する。
11a,11b,12a,12b,13a,13b,14a,14b,
15a,15b,16a,16b,17...平面モータ可動子
111a,112a,111b,112b,121a,122a,121b,122b,131a,
132a,131b,132b,141a,142a,141b,142b,151a,152a,
153a,154a,151b,152b,153b,154b,161a,162a,
163a,164a,161b,162b,163b,164b...回転防止部材
31,41,32,42,33,43,34,44,35,45,36,46...補助バー
311,411,321,322,421,422,361,362,363,461,462,463...補助バー凸部
331,431,341,342,441,442,351,451...補助バースライド部材
6,7,8,9...固定バー
61,71,81,82,83,91,92,93...固定バー凸部
5,51,52...リニアガイド
5a,51a...ショックアブソーバー
30,301...露光領域
40,401...アライメント領域
50,501...スワップ領域
Claims (26)
- 第1、第2領域を含む平面部を有する固定子と、
前記平面部の上で移動する第1、第2可動子と、
前記第1、第2可動子の位置を規制する規制機構とを備え、
前記第1、第2可動子は、前記第1、第2可動子と前記固定子との間に作用する力により目標位置に駆動され、
前記規制機構は、
前記第1、第2可動子のうち前記第1領域内に位置する可動子が目標位置から逸脱しないように該可動子の位置を規制する第1規制部と、
前記第1、第2可動子のうち前記平面部上の第2領域内に位置する可動子が目標位置から逸脱しないように該可動子の位置を規制する第2規制部とを含む、
ことを特徴とする位置決め装置。 - 前記第1領域と前記第2領域とは部分的に重複していることを特徴とする請求項1に記載の位置決め装置。
- 前記第1、第2規制部は、前記第1、第2可動子が目標位置に位置する状態においては、前記第1、第2可動子に接触しないように構成されていることを特徴とする請求項1又は請求項2に記載の位置決め装置。
- 前記第1、第2可動子は、それぞれ係合部を含み、各可動子が目標位置から逸脱することが前記係合部と前記第1又は第2規制部との接触により規制されることを特徴とする請求項1乃至請求項3のいずれか1項に記載の位置決め装置。
- 前記規制機構は、前記第1領域と前記第2領域との間で前記第1、第2可動子が交換される際に、前記係合部、及び/又は、前記第1及び第2規制部を移動させる駆動機構を含むことを特徴とする請求項4に記載の位置決め装置。
- 前記第1、第2可動子は、それぞれ少なくとも第1、第2係合部を含み、前記第2領域から前記第1領域内に駆動された可動子については前記第1係合部及び前記第1規制部によって該可動子の位置を規制し、前記第1領域から前記第2領域に駆動された可動子については前記第2係合部及び前記第2規制部によって該可動子の位置を規制することを特徴とする請求項1乃至請求項3のいずれか1項に記載の位置決め装置。
- 前記係合部は、凹部、凸部又は穴を含むことを特徴とする請求項4乃至請求項6のいずれか1項に記載の位置決め装置。
- 前記第1規制部は、前記第1、第2可動子のうち前記第1領域内に位置する可動子とともに移動する第1補助移動体に設けられ、前記第2規制部は、前記第1、第2可動子のうち前記第2領域内に位置する可動子とともに移動する第2補助移動体に設けられていることを特徴とする請求項1乃至請求項7のいずれか1項に記載の位置決め装置。
- 前記第1、第2補助移動体は、両者間の距離が変化する方向に移動可能に構成されていることを特徴とする請求項8に記載の位置決め装置。
- 前記第1、第2規制部は、それぞれ前記第1、第2補助移動体の長手方向に沿って延びており、前記第1、第2補助移動体は、前記第1、第2可動子が前記長手方向に沿って移動するときは停止し、前記第2、第2可動子が前記長手方向に直交する方向に沿って移動するときは前記第1、第2可動子とともに前記長手方向に移動することを特徴とする請求項9に記載の位置決め装置。
- 前記第1規制部は、前記第1領域内に位置する可動子とともに前記第1補助移動体の長手方向に移動可能に構成され、前記第2規制部は、前記第2領域内に位置する可動子とともに前記第2補助移動体の長手方向に沿って移動可能に構成されていることを特徴とする請求項9に記載の位置決め装置。
- 前記第1、第2補助移動体は、前記長手方向における前記第1、第2可動子の移動範囲を規制するストッパーを有することを特徴とする請求項8乃至請求項11のいずれか1項に記載の位置決め装置。
- 前記第1、第2補助移動体の移動範囲を規制する第2ストッパを更に備えることを特徴とする請求項8乃至請求項12のいずれか1項に記載の位置決め装置。
- 第1方向と直交する第2方向に沿って延びるように配置され、前記第1、第2可動子のうち前記第1領域内に位置する可動子とともに前記第1方向に沿って移動する第1補助移動体と、
前記第2方向に沿って延びるように配置され、前記第1、第2可動子のうち前記第2領域内に位置する可動子とともに前記第1方向に沿って移動する第2補助移動体と、
前記第1領域内であって前記第1補助移動体と前記第2補助移動体との間に前記第1方向に沿って延びるように配置された第1、第2固定体と、
前記第2領域内であって前記第1補助移動体と前記第2補助移動体との間に前記第1方向に沿って延びるように配置された第2固定体と、
を更に備え、前記第1規制部は、前記第1領域内の可動子の位置を規制するように前記第1補助移動体及び前記第1固定体に設けられ、前記第2規制部は、前記第2領域内の可動子の位置を規制するように前記第2補助移動体及び前記第2固定体に設けられていることを特徴とする請求項1乃至請求項7のいずれか1項に記載の位置決め装置。 - 前記第1、第2規制部と前記係合部とが接触しうる部分は、前記係合部が前記第1、第2規制部に接触したときに前記係合部が前記第1、第2規制部に対して滑り動くように構成されていることを特徴とする請求項4乃至請求項6のいずれか1項に記載の位置決め装置。
- 前記第1、第2規制部と前記係合部とは、ローラーを介して接触するように構成されていることを特徴とする請求項4乃至請求項6のいずれか1項に記載の位置決め装置。
- 前記第1、第2規制部は、それぞれ複数の片に分割された構造を有し、分割された複数の片は、独立して駆動されることを特徴とする請求項1乃至請求項16のいずれか1項に記載の位置決め装置。
- 電源が遮断された場合においても前記第1、第2規制部によって前記第1、第2可動子の位置が規制されるように前記第1、第2規制部及び前記第1、第2可動子が構成されていることを特徴とする請求項1乃至請求項17のいずれか1項に記載の位置決め装置。
- 前記第1、第2可動子の少なくとも一方は、互いを識別するための識別部を有することを特徴とする請求項1乃至請求項18のいずれか1項に記載の位置決め装置。
- 前記第1、第2可動子の位置が前記第1、第2規制部によって規制されていることを確認するセンサを更に備えることを特徴とする請求項1乃至請求項19のいずれか1項に記載の位置決め装置。
- 第1段階で、第1方向に沿った線上に並んでいる前記第1、第2可動子を前記第1方向に直交する第2方向に沿ってそれぞれ反対方向に移動させ、
次いで、第2段階で、前記第1、第2可動子を前記第1方向に沿ってそれぞれ反対方向に移動させ、
次いで、第3段階で、前記第1、第2可動子が前記線上に再び並ぶように前記第1、第2可動子を前記第2方向に沿ってそれぞれ反対方向に移動させ、
これによって前記第1、第2可動子の位置が入れ替えられることを特徴とする請求項1に記載の位置決め装置。 - 前記第2方向に延び互いに対向する第1、第2補助移動体を更に備え、前記第1、第2規制部は、それぞれ前記第1、第2補助移動体に設けられ、
前記第1段階では、前記第1、第2補助移動体を静止させた状態で、前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第2方向に沿って移動させ、
前記第2段階では、前記第1、第2補助移動体を前記第1方向に沿って移動させるとともに前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第2方向に沿って移動させ、
前記第3段階では、前記第1、第2補助移動体を静止させた状態で、前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第2方向に沿って移動させる、
ことを特徴とする請求項21に記載の位置決め装置。 - 前記第2段階では、前記第1、第2可動子が前記第2方向に沿った線上に並ぶ位置まで前記第1、第2可動子を前記第1方向に沿って移動させ、前記第2段階から前記第3段階に移行する際に、前記第1、第2可動子の位置をそれぞれ規制すべき前記第1、第2規制部を入れ替えることを特徴とする請求項22に記載の位置決め装置。
- 前記第2方向に延び互いに対向する第1、第2補助移動体と、
前記第1、第2補助移動体の間に前記第1方向に沿って配置された第1、第2固定体とを更に備え、
前記第1規制部は、前記第1補助移動体及び前記第1固定体に設けられ、
前記第2規制部は、前記第2補助移動体及び前記第2固定体に設けられ、
前記第1段階では、前記第1、第2補助移動体を静止させた状態で、前記第1、第2補助移動体に設けられた前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第2方向に沿って移動させ、
前記第2段階では、前記第1、第2補助移動体を前記第1方向に沿って移動させるとともに前記第1、第2補助移動体に設けられた前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第1方向に沿って移動させ、その後、前記第1、第2移動体を静止させ、前記第1、第2固定体に設けられた前記第1、前記第1、第2固定体に設けられた前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第1方向に沿って移動させ、
前記第3段階では、前記第1、第2補助移動体を静止させた状態で、前記第1、第2補助移動体に設けられた前記第1、第2規制部によって前記第1、第2可動子の位置を規制しながら前記第1、第2可動子を前記第2方向に沿って移動させる、
ことを特徴とする請求項21に記載の位置決め装置。 - 感光剤が塗布された基板の該基板にパターンの潜像を形成する露光装置であって、
第1、第2ステージを有し、前記第1、第2ステージ上に基板を保持してそれぞれ位置決めする位置決め装置と、
前記第1、第2ステージのうち露光領域内に位置するステージ上に保持された基板上の感光剤に潜像パターンを形成するパターン形成部とを備え、
前記位置決め装置として請求項1乃至請求項24のいずれか1項に記載の位置決め装置を備え、前記第1、第2可動子がそれぞれ前記第1、第2ステージを含むことを特徴とする露光装置。 - デバイス製造方法であって、
請求項25に記載の露光装置を用いて、感光剤が塗布された基板の該感光剤に潜像パターンを形成する工程と、
前記潜像パターンを現像する工程と、
を含むことを特徴とするデバイス製造方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106245A JP2005294468A (ja) | 2004-03-31 | 2004-03-31 | 位置決め装置、露光装置及びデバイス製造方法 |
| US11/091,673 US20050218335A1 (en) | 2004-03-31 | 2005-03-29 | Alignment apparatus, exposure apparatus, and device manufacturing method |
| EP05251985A EP1582932A3 (en) | 2004-03-31 | 2005-03-30 | Alignment apparatus, exposure apparatus, and device manufacturing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004106245A JP2005294468A (ja) | 2004-03-31 | 2004-03-31 | 位置決め装置、露光装置及びデバイス製造方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005294468A true JP2005294468A (ja) | 2005-10-20 |
Family
ID=34880085
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004106245A Withdrawn JP2005294468A (ja) | 2004-03-31 | 2004-03-31 | 位置決め装置、露光装置及びデバイス製造方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20050218335A1 (ja) |
| EP (1) | EP1582932A3 (ja) |
| JP (1) | JP2005294468A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006287122A (ja) * | 2005-04-04 | 2006-10-19 | Canon Inc | 平面ステージ装置及び露光装置 |
| KR100914494B1 (ko) | 2007-01-22 | 2009-08-28 | 정훈택 | 이동장치 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100468212C (zh) * | 2006-09-22 | 2009-03-11 | 上海微电子装备有限公司 | 双台定位交换系统 |
| JP2008078499A (ja) * | 2006-09-22 | 2008-04-03 | Canon Inc | 支持装置、露光装置及びデバイス製造方法 |
| US8361371B2 (en) | 2008-02-08 | 2013-01-29 | Molecular Imprints, Inc. | Extrusion reduction in imprint lithography |
| KR101657221B1 (ko) * | 2009-02-13 | 2016-09-13 | 마이크로닉 마이데이타 에이비 | 멀티-테이블 리소그래피 시스템 |
| CN101571676B (zh) | 2009-04-03 | 2010-12-01 | 清华大学 | 一种光刻机硅片台双台交换系统 |
| CN101551598B (zh) | 2009-04-03 | 2010-12-01 | 清华大学 | 一种光刻机硅片台双台交换系统 |
| CN101551599B (zh) * | 2009-04-03 | 2011-07-20 | 清华大学 | 一种光刻机硅片台双台交换系统 |
| IT1399285B1 (it) * | 2009-07-03 | 2013-04-11 | Applied Materials Inc | Sistema di lavorazione substrato |
| CN102495530B (zh) * | 2011-11-12 | 2014-11-12 | 哈尔滨工业大学 | 一种过梁式步进扫描和三节拍双工件台交换装置与方法 |
| NL2010628A (en) | 2012-04-27 | 2013-10-29 | Asml Netherlands Bv | Lithographic apparatus comprising an actuator, and method for protecting such actuator. |
| CN108988597B (zh) * | 2018-08-10 | 2019-12-10 | 深圳大学 | 嵌入式直线开关磁阻电机装置 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3548353B2 (ja) * | 1996-10-15 | 2004-07-28 | キヤノン株式会社 | ステージ装置およびこれを用いた露光装置ならびにデバイス製造方法 |
| JP3745167B2 (ja) * | 1998-07-29 | 2006-02-15 | キヤノン株式会社 | ステージ装置、露光装置およびデバイス製造方法ならびにステージ駆動方法 |
| JP2001118773A (ja) * | 1999-10-18 | 2001-04-27 | Nikon Corp | ステージ装置及び露光装置 |
| JP2001160530A (ja) * | 1999-12-01 | 2001-06-12 | Nikon Corp | ステージ装置及び露光装置 |
| EP1111471B1 (en) * | 1999-12-21 | 2005-11-23 | ASML Netherlands B.V. | Lithographic projection apparatus with collision preventing device |
| US6836093B1 (en) * | 1999-12-21 | 2004-12-28 | Nikon Corporation | Exposure method and apparatus |
| TWI223734B (en) * | 1999-12-21 | 2004-11-11 | Asml Netherlands Bv | Crash prevention in positioning apparatus for use in lithographic projection apparatus |
| JP2002280283A (ja) * | 2001-03-16 | 2002-09-27 | Canon Inc | 基板処理装置 |
| EP1300932B1 (en) * | 2001-10-05 | 2013-12-18 | Canon Kabushiki Kaisha | Linear motor, stage apparatus, and exposure apparatus |
| US6815699B2 (en) * | 2001-12-11 | 2004-11-09 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| US6927505B2 (en) * | 2001-12-19 | 2005-08-09 | Nikon Corporation | Following stage planar motor |
| JP4227452B2 (ja) * | 2002-12-27 | 2009-02-18 | キヤノン株式会社 | 位置決め装置、及びその位置決め装置を利用した露光装置 |
| JP2005142501A (ja) * | 2003-11-10 | 2005-06-02 | Canon Inc | ステージ装置および露光装置ならびにデバイス製造方法 |
| JP4307288B2 (ja) * | 2004-02-25 | 2009-08-05 | キヤノン株式会社 | 位置決め装置 |
| JP2005253179A (ja) * | 2004-03-03 | 2005-09-15 | Canon Inc | 位置決め装置、露光装置およびデバイス製造方法 |
| JP2005303196A (ja) * | 2004-04-15 | 2005-10-27 | Canon Inc | 位置決め装置、露光装置、半導体デバイスの製造方法 |
-
2004
- 2004-03-31 JP JP2004106245A patent/JP2005294468A/ja not_active Withdrawn
-
2005
- 2005-03-29 US US11/091,673 patent/US20050218335A1/en not_active Abandoned
- 2005-03-30 EP EP05251985A patent/EP1582932A3/en not_active Withdrawn
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006287122A (ja) * | 2005-04-04 | 2006-10-19 | Canon Inc | 平面ステージ装置及び露光装置 |
| KR100914494B1 (ko) | 2007-01-22 | 2009-08-28 | 정훈택 | 이동장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1582932A2 (en) | 2005-10-05 |
| EP1582932A3 (en) | 2010-01-20 |
| US20050218335A1 (en) | 2005-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100895640B1 (ko) | 스테이지 장치, 노광 장치 및 디바이스 제조방법 | |
| JP2005294468A (ja) | 位置決め装置、露光装置及びデバイス製造方法 | |
| US7067942B2 (en) | Linear motor, moving stage system, exposure apparatus, and device manufacturing method | |
| US7880864B2 (en) | Stage apparatus, exposure apparatus, and device manufacturing method | |
| KR100374744B1 (ko) | 위치결정장치, 노광장치, 디바이스제조방법 및 위치결정방법 | |
| US20070076310A1 (en) | Optical element holding apparatus, exposure apparatus and device manufacturing method | |
| JP7531333B2 (ja) | ステージ装置、露光装置及び物品の製造方法 | |
| US20080074635A1 (en) | Supporting apparatus, exposure apparatus, and device manufacturing method | |
| US7361910B2 (en) | Movable stage apparatus | |
| JP3679776B2 (ja) | 駆動装置、露光装置及びデバイス製造方法 | |
| US6504599B2 (en) | Stage apparatus, exposure apparatus, and device manufacturing method | |
| US20060215144A1 (en) | Stage drive method, stage apparatus, and exposure apparatus | |
| US20080266037A1 (en) | Magnetic Levitation Lithography Apparatus and Method | |
| US7282819B2 (en) | Stage apparatus, exposure apparatus, and device manufacturing method | |
| JP2015073083A (ja) | ステージ装置、およびその駆動方法 | |
| KR20080063101A (ko) | 스테이지 장치, 노광장치 및 디바이스 제조방법 | |
| US7602091B2 (en) | Positioning apparatus and exposure apparatus | |
| US12609228B2 (en) | Electromagnetic device, alignment apparatus, and article manufacturing method | |
| US7782444B2 (en) | Top plate, positioning apparatus, exposure apparatus, and device manufacturing method | |
| US7468783B2 (en) | Exposure apparatus, control method for the same, and device manufacturing method | |
| JP4262153B2 (ja) | 位置決め装置およびそれを用いた露光装置 | |
| US6965426B2 (en) | Positioning system and exposure apparatus having the same | |
| US7239051B2 (en) | Driving apparatus and exposure apparatus | |
| JP4653189B2 (ja) | リニアモータ製造方法 | |
| JP2008130854A (ja) | 位置決め装置、露光装置及びデバイス製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060427 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070223 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070521 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20070719 |