JP2005292628A - 光走査装置、画像形成装置 - Google Patents
光走査装置、画像形成装置 Download PDFInfo
- Publication number
- JP2005292628A JP2005292628A JP2004110000A JP2004110000A JP2005292628A JP 2005292628 A JP2005292628 A JP 2005292628A JP 2004110000 A JP2004110000 A JP 2004110000A JP 2004110000 A JP2004110000 A JP 2004110000A JP 2005292628 A JP2005292628 A JP 2005292628A
- Authority
- JP
- Japan
- Prior art keywords
- optical scanning
- light
- scanning
- module
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Facsimile Scanning Arrangements (AREA)
- Laser Beam Printer (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Exposure Or Original Feeding In Electrophotography (AREA)
- Control Or Security For Electrophotography (AREA)
- Facsimile Heads (AREA)
Abstract
【課題】 隣接する走査線の継ぎ目を正確に合わせる事を可能とする光走査装置、それを用いた画像形成装置を提供する。
【解決手段】 光ビームを発する光走査モジュールと、前記光走査モジュールからの光ビームを検知し、光検知信号を出力する光検知モジュールとを有し、前記光走査モジュールを主走査方向に走査ラインが一直線になるように複数器配列したことを特徴とする。
【選択図】 図1
【解決手段】 光ビームを発する光走査モジュールと、前記光走査モジュールからの光ビームを検知し、光検知信号を出力する光検知モジュールとを有し、前記光走査モジュールを主走査方向に走査ラインが一直線になるように複数器配列したことを特徴とする。
【選択図】 図1
Description
本発明は、光走査装置、それを用いた画像形成装置に関する。
従来の光走査装置において、光ビームを走査する光偏向器としてポリゴンミラーが多く用いられている。ポリゴンミラーは高速に回転して光ビームを走査するが、ポリゴンミラーを用いた画像形成では、より高い解像度の画像及び高速の画像形成を達成するには、ポリゴンミラーをさらに高速に回転させる必要がある。
しかし、ミラーの高速回転を達成するには、軸受けの耐久性を向上し、発熱、騒音の対策を行う必要がある課題を解決しなければ成らない、したがって、ミラーが形成された回転体を使用した高速走査には限界がある。
一方、近年光ビームを走査する光走査装置は、シリコンマイクロマシニング技術を利用した微小ミラーを揺動させる構成の物が提案されている。この様なマイクロミラーディバイスはその駆動方式から大別して、電磁駆動方式、静電駆動方式が提案されている。
また、特許文献1では磁界発生手段を用いた方法が提案されている。特許文献2では静電誘導発生手段を用いた方法が提案されている。
このような従来の提案ではマイクロミラー可動部の駆動方式として、磁界発生手段を用いた駆動方式が用いられ、静電誘導発生手段を用いた駆動方式では駆動電圧を正弦波交流信号として定常的に印加して駆動する方式となっている。
静電誘導発生手段を用いた代表的な例として特許文献3で開示された静電引力によってミラーを揺動させる光走査装置を示す事が出来る。
ところで、上述したような揺動型ミラーの振れ角は一般的に10°以下程度であり、ポリゴンミラーによる光ビームの振れ角40°程度まで走査角を得るのは困難とされている。この為、揺動型ミラーを用いた光走査装置を用いた画像形成には、走査幅を確保する為に光路長を長く取る必要があり、光走査装置のサイズが大きくなってしまう欠点が有った。
前記揺動型ミラーを用いた光走査装置の利点である小型化、高速、省電力を生かして、ポリゴンミラーと同等の画像形成の記録幅を確保する為に、前記揺動型ミラーを用いた光走査装置を複数個隣接して配置して画像形成を実現する方法が提案されている。
特開2002−78368号公報
特開平8−211320号公報
特許第3011144号公報
特開2000−162538号公報
特開平9−68666号公報
特開平6−208066号公報
特開2002−267966号公報
特開2003−98459号公報
しかしながら、各々独立して光走査装置を隣接して配置して画像形成を行う場合、各光走査装置の光走査の位相、及び走査周波数が合っていないと、記録開始のタイミングの違いによる開始位置の位置ずれや、走査周期の不一致による主走査方向の記録幅の変動、或は、副走査ラインピッチの誤差が累積され、隣接する走査線の継ぎ目がずれる恐れがある。
本発明はこのような問題点に鑑み、隣接する走査線の継ぎ目を正確に合わせる事を可能とする光走査装置、それを用いた画像形成装置を提供することを目的とする。
上記課題を解決するために、本発明は、光ビームを発する光走査モジュールと、前記光走査モジュールからの光ビームを検知し、光検知信号を出力する光検知モジュールとを有し、前記光走査モジュールを主走査方向に走査ラインが一直線になるように複数器配列したことを特徴とする。
また、上記課題を解決するために、本発明は、前記光検知モジュールは、光ビームを発する光源手段と、前記光ビームを偏向走査する偏向ミラーと、前記偏向ミラーを揺動する偏向ミラー駆動手段とを有することを特徴とする。
また、上記課題を解決するために、本発明は、前記光源手段は、複数の光ビームを発し、該複数ビームの一つは前記光検知モジュール面を走査するビームであり、他のビームは画像信号により独立に変調されるとともに、像担保体の被走査面上に光書込みを行う光ビームであることを特徴とする。
また、上記課題を解決するために、本発明は、前記光検知モジュールは、等間隔で配列され光検知部材を含み、前記光検知部材により、光ビームが所定の位置を通過したことを検出して位置検知信号を出力するとともに、光書出し位置を検出して同期検知信号を出力することを特徴とする。
また、上記課題を解決するために、本発明は、前記光検知モジュールは、各光走査モジュール毎に独立して、前記位置検知信号及び前記同期検知信号を出力することを特徴とする。
また、上記課題を解決するために、本発明は、前記光検知モジュールは、隣合う光走査モジュールの走査領域が互い重複することを可能としたことを特徴とする。
また、上記課題を解決するために、本発明は、前記光検知部材間での走査時間を測定する測定手段と、前記各走査モジュールの各走査時間と予め設定された基準走査時間を比較して、上記偏向ミラーの揺動周期を調整する調整量を設定する調整量設定手段と、前記調整量設定手段が設定した調整量に基づいて前記偏向ミラーの揺動周期を調整する調整手段とを有することを特徴とする。
また、上記課題を解決するために、本発明は、前記測定手段、調整量設定手段、調整手段は各光走査モジュールに備えられていることを特徴とする。
また、上記課題を解決するために、本発明は、前記全ての偏向ミラー駆動手段の揺動力を定める設定量を、一つの光走査モジュールの光走査に基き定められた設定量である基準設定量とすることを特徴とする。
また、上記課題を解決するために、本発明は、前記偏向ミラー駆動手段の設定量を、前記基準設定量に基づき補正された補正設定量とすることを特徴とする。
また、上記課題を解決するために、本発明は、前記基準設定量を定める光走査モジュールは、主走査領域における走査が開始される位置に配置された光走査モジュールであることを特徴とする。
また、上記課題を解決するために、本発明は、前記調整手段が調整する調整量を記憶する記憶手段を有し、前記調整手段は、前記調整量を前記記憶手段に記憶した後、該記憶手段に記憶した調整量に基づいて前記調整処理を実行することを特徴とする。
また、上記課題を解決するために、本発明は、前記偏向ミラーを配設した可動部材と、前記可動部材を揺動可能に支持する支持部材とを有し、前記偏向ミラー駆動手段は、前記可動部材の持つ固有振動数に共振する共振周波数を除いた周波数領域で前記可動部材を揺動することを特徴とする。
また、上記課題を解決するために、本発明は、光導電性の像担保体を帯電し、該像担保体に静電潜像の書込みを行い、形成された静電潜像を現像して可視化し、この可視像を記録材に転写し、定着する方式の画像形成装置において、前記像担保体への静電潜像の書込みに、請求項1から13のいずれか1項に記載の光走査装置を用いたことを特徴とする。
本発明は以上説明したように、隣接する走査線の継ぎ目を正確に合わせる事を可能とする光走査装置、それを用いた画像形成装置を提供することができる。
以下、図面を参照し、本発明の実施形態について説明する。
まず、図1を用いて本発明の実施の形態に係る光走査モジュールの概略を説明する。図1に示される光走査モジュール203は、偏向ミラー40と、光源手段に対応する複数レーザー光源200と、光ビームa201と、光ビームb202と、fθレンズ207、208とを有する。
図1に於いて複数レーザー光源200から出射された光ビームは、偏向ミラー40により任意の偏向領域を光走査するようになっている。この偏向ミラー40の動作について図2を用いて説明する。
図2は、一般的な偏向ミラーの正面と上面から見た図である。図2に示される偏向ミラーは、支持基板101と、ミラー102と、トーションバー103と、パッド104,108と、ミラー電極部105と、絶縁体106と、固定電極107とで構成される。
支持基板101に設けられた凹部にミラー102が配置され、このミラーは一体的に設けられたトーションバー103を介して支持基板101に支持される。ミラー102はトーションバー103の捩じり作用により、その両側がミラーの平面に対して垂直方向に揺動可能としている。
トーションバー103は導電性部材で構成され、その両端は支持基板101に設けられたパッド104に電気接続されている。さらに、支持基板101の凹部の両側には絶縁体106を介して固定電極107が支持されている。
固定電極107は、ミラー102の両側にあるミラー電極部105との位置関係を、ミラー電極部105の初期位置よりも揺動方向に沿って高い位置に配置する構成となっており、ミラー電極部105の初期位置においてミラー電極部105と固定電極部107とは高低差を持って配置したものとなっている。
この装置は、固定電極107のパッド108とトーションバー103が接続されたパッド104との間に高電圧を印加し、固定電極107とミラー102との間に静電力を発生させ、その静電引力によってミラー102の一方の側面を固定電極107側に吸引する。
この吸引動作によってトーションバー103を捩じり変形させながらミラー102をミラーの平面に対して垂直方向に揺動させる。この揺動動作の直後に固定電極107への弾圧印加を解除すると、トーションバー103の捩じり復元力によってミラーは逆方向に揺動される。
この電圧印加と停止を繰り返すことにより、ミラー102を揺動させることが出来、光源からの光をミラー102で反射させることで、光を偏向、走査が可能となる。
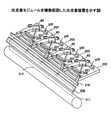
次に、図3を用いて光走査装置の概要について説明する。光走査装置は、複数の光走査モジュール203が像担保体である感光体の長軸方向に隣接して配置される、この図では単一感光体に対して4器の光走査モジュール203が配設されている。各光走査モジュール203は感光体面上を分割して任意の範囲を光走査可能である。
この光走査装置では、上述したように、複数レーザー光源200から出射された光ビームは、偏向ミラー40により偏向され、感光体の長軸方向である主走査方向に走査される。なお、複数レーザー光源200は、本実施の形態において、複数の光ビームであり、2本光ビームを用いている。
2本の光ビームのうちの一本の走査光路上には、等角走査を等速走査への変換用fθレンズ207,208、光路変更ミラー209が配設され、感光体面上211に微小レーザービームスポット212を結像する。他方のビームの走査光路上には光検知モジュール216が配設され、偏向ミラー40により偏向されたビームが光検知モジュール216の長軸方向に走査される。
このように、本実施の形態における光走査装置では、単一光検知モジュール216に対して配設された四つの光走査モジュール203から偏向された光ビームは光検知モジュール216面上を分割して任意の範囲を光走査可能となっている。
また、光検知モジュール216は光検知部材217が等間隔で配置され、光を検知する光量に対応した光電流を発生する。隣接する光ビームが同時に光検知部材を走査した時光量は通常の量より多い光量を受け、光電流もそれに見合って多くなる。
このときの重複検知信号について説明する。図4は複数の光走査モジュールが隣接配設された光走査装置を示しており、光ビーム走査領域が隣接する境界部で重複している例が示されている。
図4において、左側から2器の隣接する光走査モジュールの光検知モジュール216面上での走査領域は、それぞれ左から、WA,WBであり、走査領域における重複領域はWOABである。LA、LBは、各光走査モジュールの揺動振幅である。LOABは、揺動振幅で重複する領域である。
光検知モジュール216を拡大したものを、図5を用いて説明する。図5には、さらに、検知信号例C、重複検知信号例Dも示している。また、図5には、光ビームが光検知モジュールを光走査した時の光検知信号が図示されている。また、光検知モジュール216内の光検知部材217を拡大したものも図示されている。
この図5において、WA、WB、WC、WDは、図4と同様に、4器の光走査モジュールが光走査する領域を示している。また、WOA、WOB、WOCも同様に、2つの光走査モジュールが光走査する重複領域である。また、Pa*は、領域WAで検地された信号を表し、ta*は、領域WAにおける検知信号間の走査時間を表している。Pb*、tb*も同様である。Pab*は、領域WOAで検知された重複信号である。
図5では、光検知部材217が一定間隔で配置され、隣接する互いの重複範囲WOABには、光検知部材217が3個配置されている。
走査領域WAで走査することによる検知信号はPan-2,Pan-1,Panであり、走査領域WBで走査することによる検知信号はPb1、Pb2、Pb3である。
このとき、走査領域WAでの走査時間Pan-2〜Pan-1の時間△ta1、Pan-1〜Panの時間△ta2とし、走査領域WBでの走査時間Pb1〜Pb2の時間△tb1、Pb2〜Pb3の時間△tb2とする。
そして、走査時間△ta1と△tb1の比較と、走査時間△ta2と△tb2の比較を行うことにより、走査速度の差分及びお互いの位相を知る事が出来る。この差分及び位相が隣接する光走査モジュールの継ぎ目の調整に用いる事により、選り正確に調整が可能となる。
次に、光走査モジュール203が光検知モジュール216を光走査する時の信号発生の概略を、図6を用いて説明する。
図6のグラフAは、偏向ミラーの振幅を示すものである。このように、偏向ミラーが位置検知センサL1の位置から位置検知センサLnの位置の間隔の振幅で揺動しているとすると、振幅間に配設された光検知部材217で光を受光すると、光検知部材の位置に対応した信号を発生する。
このとき、光検知部材の位置をそれぞれL1, L2, L3..... Lnとすると、図6のグラフBに示す様、位置検知信号P1,P2,P3....Pnが出力される。また、図6の例ではL1〜Lnの範囲で揺動しているので、グラフCに示されるように、L1を、揺動周期Taを計測する同期基準信号とする。また、グラフDに示されるように、L1は、偏向ミラーを揺動する揺動力を与える駆動信号印加タイミングを調整する信号としても用いられる。
揺動振幅が検知位置L1〜Lnの幅の場合、この揺動振幅は揺動条件により変動する場合がある。例えば揺動振幅が検知位置L2〜Ln-1の間であった場合、検知位置L2で検知された同期検知信号が同期基準信号と見なされ、この信号を基準にして揺動周期の計測、また、偏向ミラーを揺動する揺動力を与える駆動信号印加タイミングを調整する信号としても用いることが出来る。
この様に複数の光検知部材を一定間隔で配置することにより、揺動振幅が変動(小さくなっても)しても、偏向ミラーの揺動軌跡を検知出来る。
以上説明した図6の光走査モジュールと光検知モジュールの関係を述べたが、光走査モジュールを複数個配設して用いる構成での軌跡について図7で示している。
図7では、光走査装置に設けられた4器の光走査モジュールをそれぞれ光走査モジュールA,B,C,Dとおき、それらの軌跡が描かれている。これらの軌跡は、各光走査モジュールA,B,C,Dの揺動振幅が、それぞれLA1〜LAn、LB1〜LBn、LC1〜LCn、LD1〜LDnであり、揺動周期はそれぞれTA,TB,TC,TDであるので、これら振幅と周期である揺動軌跡となっている。
4器の光走査モジュールより構成された光走査装置を画像形成行う光書込み装置として用いる場合、4器の光走査モジュールの揺動軌跡の揺動周期、揺動振幅が同一でないと形成される画像品質が劣化する事が懸念される。
このような揺動軌跡が異なる場合について、図8を用いて説明する。図8は、走査周期A軌跡と走査周期B軌跡の走査周期が異なる例を示している。図8において、X軸と平行な直線は、光検知位置を示している。また、PA2〜PAn-1、PB2〜PBn-1は、走査周期A軌跡と走査周期B軌跡でのL2〜Lnで検知した信号を示しており、TA、TBはそれぞれ周期の周期である。
この図8に示されるように、走査周期が異なると、図中検知信号PA2,PB2の検知タイミングが異なり、例えば、それぞれPA、PBを基準同期信号とした場合、画像形成時のタイミング、偏向ミラーの揺動力印加タイミングも異なり、隣接する光走査モジュールの継ぎ目が乱れることになる。
このように、複数の光走査モジュールを用いた場合、各光走査モジュールの揺動周期或は揺動振幅等が偏向ミラーの経時変化、揺動力を与える電圧の変化、温度湿度気圧等の環境の変化により微妙に変動する事が知られている。このような変動は適時調整可能とし常に適正な揺動周期及び揺動振幅の設定値が設定可能であれば良い。その解決法として、主走査方向に配設された光検知モジュールから得られる光検知信号を用いて前記揺動周期及び揺動振幅の設定値が設定可能出来る。
光走査装置(図3参照)では、感光体面上のビームスポットは常に所定位置に結像しなければならない。一般的に隣り合う結像点間の位置誤差は12.5%以下の精度が要求されている。
このような書き込み装置に用いる光走査装置での、走査位置精度維持の方法について、先ほど説明した図6を用いて説明する。偏向ミラーに因る揺動軌跡が理想波形を描いた場合、揺動軌跡波形は図6のグラフAに示される単振動波形を示す。また、感光体面上にビームスポットを形成する範囲は感光体面上の長軸方向走査領域である。
この感光体と並行に光検知モジュールが配設され、4器配列された各光走査モジュールの偏向ミラーで偏向された光ビームを検知する光検知モジュールが配され、これらで検知された信号P1〜Pnが得られる。
信号P1〜Pnから、グラフCに示すような同期基準信号P1が生成される。同期基準信号P1を基準として、他の信号P2〜PnではP1から各信号間の時間が計測される。
上述した図5では、信号Pa1とPa2間の時間Ta1,信号Pa1とPa3間の時間Ta2、.... 信号P1とPn間時間Tanが示されている。この各時間Ta1,Ta2,.....Tanを計測することにより、偏向ミラーに因る揺動軌跡の周期変動を計測する事が出来、計測結果から変動量を求め補正設定量が定まり、補正制御が可能になる。
このように、走査領域の光ビーム軌跡の計測可能とする感光体面上走査領域の範囲に、光検知部材を配置した構成の光走査装置を提供することができる。
次に、複数光走査モジュールの偏向ミラー揺動制御に関して説明する。走査時間を測定する測定手段と、偏向ミラーの揺動周期を調整する調整量を設定する調整量設定手段と、偏向ミラーの揺動周期を調整する調整手段は各モジュールに備えられ、各モジュールは独立して偏向ミラーの揺動周期をコントロールする事が出来る。
この例として、図9の光走査装置の制御ブロック図について説明する。図9には、記憶手段に対応するRAM33と、ROM32と、MPU31と、クロック30と、アドレス/データバス34と、駆動信号発生タイミング制御部36と、駆動信号発生器39と、電圧可変部47と、ドライバーアンプ部41と、光ビーム発生タイミング制御部50と、光ビームドライブ部52と、光ビーム発生部51と、複数レーザー光源200と、光検知モジュール216と、感光体211と、センサアンプ部42と、位置信号検出部38と、基準クロック生成部48と、時間計測部49と、同期信号生成部37と、時間差演算回路46とが示されている。
このうち、駆動信号発生タイミング制御部36と、駆動信号発生器39と、電圧可変手段47と、ドライバーアンプ部41から構成される駆動部が、偏向ミラー40を揺動可能とし、其々の光走査モジュールに配設されている。この駆動部は、偏向ミラー駆動手段に対応する。
光検知モジュールの光検知部材に対応した複数のセンサアンプ部42、位置検知信号生成部38、同期基準信号生成部37、時間差演算回路部46は検知手段であり、この検知手段により、信号検知部からの信号が検知及び格納される。
駆動部はMPU31からの制御指示に従い、電圧可変部47では電極に印加する電圧を設定し、デジタルデータ格納部36には電極に印可する信号の駆動周波数に関するデータが格納させ、駆動信号生成器39ではデジタルデータ格納部36に格納されたデータに対応した駆動周波数を生成する。
駆動信号生成器39で生成された信号はドライバーアンプ部41に接続されている。ドライバーアンプ部41では信号印加電圧が電圧可変部47により任意に可変可能となっている。ドライバーアンプ部41の出力は偏向ミラーに配設された端子に接続され各電極に信号を与える。
検知手段では、センサアンプ部42が光検知モジュール216の信号検知部から取り出した信号を増幅し、位置検知信号生成部38が位置検知信号を生成し、その位置検知信号から同期基準信号生成部37が同期基準信号を生成する。
また基準クロック生成部48は同期基準信号に同期したクロックを生成し、各同期基準信号間の時間を計測するために利用される。
光ビーム発生部は、光ビーム発生タイミング制御部50と、光ビーム発生部51と、光ビームドライブ部52から構成される。光ビーム発生部は、感光体面上への光ビーム走査制御、及び光検知モジュールへの光ビーム走査制御を行う。
RAM33は調整手段が調整する調整量を記憶可能としている、一度調整量をRAM33に記憶した後は、記憶した調整量に基づいて調整処理を実行することにより、毎時調整量を算出する手順が省略可能となり、より早い調整処理時間で実行可能となる。
以上説明した構成で、複数の光走査モジュールは感光体面上に画像を形成するには、お互いに揺動周期、位相が同一で有る事が要求される。先ほど説明した図7に示されるように、全て同一の揺動軌跡で揺動する必要がある。
各光走査モジュールを同一揺動軌跡で揺動させるために、例えば起動開始時などの所定のタイミングを定めた場合、そのタイミングで先ず任意の一つの光走査モジュールを揺動動作させ、その後他の残りを順次揺動させる手順とする。
この方法から、任意の1つの光走査モジュールの光走査揺動軌跡から得られた設定量を基準設定量とし、この基準設定量を基に全ての駆動部に可動ミラー揺動力を与えることとする事により、各々独立して各光走査モジュールに毎時同一揺動設定量を与える方法に比べ、揺動時の環境条件に沿った設定量を毎回調整する事が出来る為、起動開始時の起動手順が簡便に行える。
さらに、先ほどの起動開始時の起動手順において、任意の1つの光走査モジュールの光走査に起因する設定量を基準設定量とする光走査モジュールを、主走査領域の開始位置に配置される光走査モジュールとすることにより、光走査方向の上流から下流に向けて順次設定可能とする事となり、起動開始時の起動手順がより簡便に行える。
さらに、任意の1つの光走査モジュールの光走査に起因する設定量を基準設定量とし、他の各光走査モジュールでの走査による設定量は、前記基準設定量との比較量となし、基準設定量と各々比較量との差分を補正する補正設定量として各々の駆動部に可動ミラー揺動力を与えることにより各光走査モジュール間の微妙な揺動周期の調整が可能となる。
次に、図10を用いて偏向ミラーについて説明する。偏向ミラーはシリコンマイクロマシニング技術を用いて形成されている。
この偏向ミラーは、シリコン基板1と、支持部材2と、固定電極3と、可動部材配設電極4と、ミラー部9と、可動部材10とで構成される。
シリコン基板1は、矩形の単層厚板で形成される。可動部材10は、可動部材配設電極4とミラー部9が形成されている。可動部材配設電極4に対向して固定電極3と可動部材10に一体的に両側に突出形成された支持部材2は、両端でシリコン基板に固定されている。これにより、前記可動部材10は支持部材2の捩じりにより、ミラー部9の平面方向と垂直な方向に揺動可能となる。
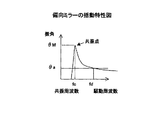
このように、偏向ミラーを配設した可動部材と、前記可動部材を揺動可能に支持する支持部材とを有し、可動部材を揺動可能とする光走査装置において、通常駆動周波数は、可動部材の持つ固有振動数に共振する共振周波数とする事が多い。
これは、共振周波数点では可動部材の揺動角が最大になる為である。図11は、偏向ミラーの揺動特性図である。この図11の揺動特性図において、可動部材の持つ固有振動数に共振する共振周波数領域は狭く、Q値が高い駆動物体となっている。従来はQ値が高い為光ビームの偏向角を正確に検知する為、高精度のセンサを多数設置する必要があったり、検知回路が複雑になり製造コストも増大する問題があった。
本実施の形態で用いる駆動周波数は図11において共振周波数から外れた周波数を用いて可動部材を駆動する方式である。このようにQ値が低い周波数を用いる事により、周波数が変動対するミラー揺動角の変動が少ない、即ちミラー駆動周波数を変化させてもミラー揺動角の変動が少なくなる。
従ってミラー揺動特性のジター等の発生を減少させるコントロールが容易になり、また複数ミラーを用いた場合複数ミラーでの駆動周波数を一致し易い。また、駆動パルスを印加するためのミラーの揺動位置を検知する方法も簡便化可能となる。
次に、図12を用いて、上述した書き込み手段を用いた画像形成装置について説明する。図12には、帯電部304と、光書き込み部303と、現像部302と、転写部309と、感光体305と、クリーニング部306と、定着部307と、用紙搬送部308と、用紙収納部300と、給紙部301と、ローラ310と、レジスト部311とが示されている。
この画像形成装置には、感光体305の廻りに帯電部304と、光書き込み部303と、現像部302と、転写部309と、クリーニング部306とが配される。図示されていない画像形成装置制御部により画像形成の開始を指示されると、感光体305は時計方向に回転して、光書き込み部303は、偏向ミラーを駆動し同期信号を生成し、帯電部304により感光体を帯電する。そして、光書き込み部303にて図示していない外部入力装置から入力された画像データに対応した潜像が形成され、現像部302にて像可視化剤により可視化像を得る。
用紙収納部300に収納された用紙は、給紙部301により給紙され、レジスト部311により用紙搬送タイミングと書き込みタイミングを合わせ所定の位置に像可視化剤による顕在像を転写部309にて転写可能とする。
用紙に転写された像可視化剤による顕在像は定着部307で定着され、入力された画像データが用紙上に可視化固定される。光書込み部303は、今まで説明した光走査装置を搭載している。
光走査装置は外部入力装置から画像データが入力されないアイドル状態で適時光走査装置の偏向ミラーの揺動動作状態を調査できる。図示されていない手段で偏向ミラーを、位置検知信号を検知する光ビーム走査である位置検知光ビーム走査モードに設定する。光ビームを発生し位置検知部材を走査させ、位置検知信号P1〜Pnを得、これらを基に、同期基準信号Pa1,Pb1,Pc1,Pd1,基準クロック、各位置検知信号間の時間等をデータ信号処理部で演算しRAMに格納する。
次に揺動軌跡の理想波形から算出された予め記憶部に記憶されている上記、位置検知信号P1〜Pn、同期基準信号Pa1,Pb1,Pc1,Pd1,基準クロック、各位置検知信号間の時間、等の標準値と前記計測により得られた値とを比較演算し、標準値との差分求める。その差分を元に周期を演算しRAMに記憶する。
次に、外部入力装置から画像データが入力され感光体面上にビームスポットを形成するモードについて述べる。外部からの画像データ入力を受けて、データ信号処理部は画像データに対応したビームスポットを感光体面上に形成する。
先ず始めに、図示されていない手段で偏向ミラーを、感光体面上を光ビーム走査する感光対面上光ビーム走査モードに設定する。次に偏向ミラーを揺動駆動し、一ライン毎感光体面上にビームスポットを形成していく。
光ビームは光検知モジュール(図3参照)で得られる信号を検知感光体面上へのビームスポット形成の基準位置とする。光検知モジュールの走査タイミングは、外部からの画像データが入力していない状態や、記録用紙への印刷ジョブのジョブ間で行う場合である。光検知モジュールは、複数の光ビームを同時に発光可能な事より、位置検知信号を検知する光ビーム走査である位置検知光ビーム走査モードと感光体面上にビームスポットを形成するモードを同時に行うことが出来、偏向ミラー揺動軌跡の情報が逐次入手でき、より精度の良い制御が可能となる。
以上説明したように本実施の形態では、複数配置された光走査モジュールの揺動軌跡の周波数、位相を計測する事が出来、各複数光走査モジュールの周波数、位相を管理可能とし、各光走査モジュール間の継ぎ目のずれを減少する事が可能となる。
また、本実施の形態では、光走査モジュールの揺動幅(振幅)が変動して任意の振幅時の揺動周期が計測可能である。そして同様に振幅が変動しても任意の位置を光書出し位置の同期検知手段として計測可能とする事により継ぎ目のずれ少ない制御が可能になる。
さらに、本実施の形態では、必要とされる任意の光走査モジュールの揺動周期及び、光書出し位置の計測可能とする事により光走査モジュールの加減時の制御が容易になる。
また、本実施の形態では、隣接する光走査モジュールの揺動周期及び、光書出し位置の計測値を直接比較する事が出来、より正確に隣接する光走査モジュール間の調整が可能となる。
また、本実施の形態では、光検知モジュールから得られた位置検知信号間を通過する時間を計測出来、さらに位置検知信号間を通過する基準時間を設定しておく事に居り、基準時間との比較が可能となり、基準時間に対する差異を求める事ができる。また、差異に基づき差異を調整する様調整量を設定する調整量設定手段に調整され、揺動周期調整手段より、偏向ミラーの揺動周期を調整し、各光走査モジュールの光走査周期を同一にする事が出来る。
さらに、本実施の形態では、複数光走査装置の配置数の増減に伴っても各光走査モジュール単独で各処理を行う事が出来、光走査装置の構成が簡単になる。
また、本実施の形態では、1つの光走査モジュールの光走査揺動軌跡から得られた設定量を基準設定量とし、この設定量を基に全ての偏向ミラー駆動手段に偏向ミラー揺動力を与えることとする事により、各々独立して各光走査モジュールに毎時同一揺動設定量を与える方法に比し、揺動時の環境条件に沿った設定量を毎回調整する事が出来る為、起動開始時の起動手順が簡便に行える。
さらに、本実施の形態では、基準設定量を定める光走査モジュールは主走査領域の開始位置に配置される光走査モジュールとすることにより、光走査方向の上流から下流に向けて順次設定可能とする事により、起動開始時の起動手順がより簡便に行える。
さらに、本実施の形態では、モジュール走査による設定量を、基準設定量と各々比較量との差分を補正する補正設定量として各々の偏向ミラー駆動手段に偏向ミラー揺動力を与えることにより各光走査モジュール間の微妙な揺動周期の調整が可能となる。
また、本実施の形態では、調整量をRAMに記憶した後は、記憶した調整量に基づいて上記調整処理を実行することに因り、毎時調整量を算出する手順が省略可能となりより早い調整処理時間で実行可能となる。
また、本実施の形態では、所望する偏向ミラーの揺動角度を、可動部材の持つ固有振動数に共振する共振周波数を除いた周波数領域で実現することより、経時変化、温度変化に強い、或は変動を容易に修正可能とする駆動制御方式が選択でき、より安定した光走査装置が提供できる。
さらに、本実施の形態では、上述した光走査装置を画像形成装置に用いることにより、従来のポリゴンミラーを用いた光走査装置で画像形成する画像形成装置より、走査幅の広い、高速な画像形成装置となる。
1 シリコン基板
2 支持部材
3 固定電極
4 可動部材配設電極
9 ミラー部
10 可動部材
30 クロック
31 MPU
32 ROM
33 RAM
34 アドレス/データバス
36 駆動信号発生タイミング制御
37 同期基準信号
38 位置検知信号生成部
39 駆動信号生成器
40 偏向ミラー
41 ドライバーアンプ部
42 センサアンプ部
44 光ビーム発生部
50 光ビーム発生タイミング制御
51 光ビーム発生部
52 光ビームドライブ部
101 基板
102 ミラー
103 トーションバー
104、108 パッド
105 ミラー電極部
106 絶縁体
107 固定電極
200 複数レーザー光源
201 光ビームa
202 光ビームb
203 光走査モジュール
207、208 fθレンズ
209 折り返しミラー
211 感光体
212 結像スポット列
216 光検知モジュール
217 光検知部材
300 用紙収納部
301 用紙給紙部
302 現像部
303 複数ビーム書き込み部
304 帯電部
305 感光体
306 クリーニング部
307 定着部
308 用紙搬送部
2 支持部材
3 固定電極
4 可動部材配設電極
9 ミラー部
10 可動部材
30 クロック
31 MPU
32 ROM
33 RAM
34 アドレス/データバス
36 駆動信号発生タイミング制御
37 同期基準信号
38 位置検知信号生成部
39 駆動信号生成器
40 偏向ミラー
41 ドライバーアンプ部
42 センサアンプ部
44 光ビーム発生部
50 光ビーム発生タイミング制御
51 光ビーム発生部
52 光ビームドライブ部
101 基板
102 ミラー
103 トーションバー
104、108 パッド
105 ミラー電極部
106 絶縁体
107 固定電極
200 複数レーザー光源
201 光ビームa
202 光ビームb
203 光走査モジュール
207、208 fθレンズ
209 折り返しミラー
211 感光体
212 結像スポット列
216 光検知モジュール
217 光検知部材
300 用紙収納部
301 用紙給紙部
302 現像部
303 複数ビーム書き込み部
304 帯電部
305 感光体
306 クリーニング部
307 定着部
308 用紙搬送部
Claims (14)
- 光ビームを発する光走査モジュールと、
前記光走査モジュールからの光ビームを検知し、光検知信号を出力する光検知モジュールとを有し、
前記光走査モジュールを主走査方向に走査ラインが一直線になるように複数器配列したことを特徴とする光走査装置。 - 前記光検知モジュールは、
光ビームを発する光源手段と、
前記光ビームを偏向走査する偏向ミラーと、
前記偏向ミラーを揺動する偏向ミラー駆動手段と
を有することを特徴とする請求項1に記載の光走査装置。 - 前記光源手段は、
複数の光ビームを発し、該複数ビームの一つは前記光検知モジュール面を走査するビームであり、
他のビームは画像信号により独立に変調されるとともに、像担保体の被走査面上に光書込みを行う光ビームであることを特徴とする請求項2記載の光走査装置。 - 前記光検知モジュールは、
等間隔で配列され光検知部材を含み、
前記光検知部材により、光ビームが所定の位置を通過したことを検出して位置検知信号を出力するとともに、光書出し位置を検出して同期検知信号を出力することを特徴とする請求項2または3に記載の光走査装置。 - 前記光検知モジュールは、
各光走査モジュール毎に独立して、前記位置検知信号及び前記同期検知信号を出力することを特徴とする請求項4記載の光走査装置。 - 前記光検知モジュールは、
隣合う光走査モジュールの走査領域が互い重複することを可能としたことを特徴とする請求項4または5に記載の光走査装置。 - 前記光検知部材間での走査時間を測定する測定手段と、
前記各走査モジュールの各走査時間と予め設定された基準走査時間を比較して、上記偏向ミラーの揺動周期を調整する調整量を設定する調整量設定手段と、
前記調整量設定手段が設定した調整量に基づいて前記偏向ミラーの揺動周期を調整する調整手段と
を有することを特徴とする請求項2に記載の光走査装置。 - 前記測定手段、調整量設定手段、調整手段は各光走査モジュールに備えられていることを特徴とする請求項7に記載の光走査装置。
- 前記全ての偏向ミラー駆動手段の揺動力を定める設定量を、一つの光走査モジュールの光走査に基き定められた設定量である基準設定量とすることを特徴とする請求項7または8に記載の光走査装置。
- 前記偏向ミラー駆動手段の設定量を、前記基準設定量に基づき補正された補正設定量とすることを特徴とする請求項9に記載の光走査装置。
- 前記基準設定量を定める光走査モジュールは、主走査領域における走査が開始される位置に配置された光走査モジュールであることを特徴とする請求請項9または10に記載の光走査装置。
- 前記調整手段が調整する調整量を記憶する記憶手段を有し、
前記調整手段は、前記調整量を前記記憶手段に記憶した後、該記憶手段に記憶した調整量に基づいて前記調整処理を実行することを特徴とする請求項7から11のいずれか1項に記載の光走査装置。 - 前記偏向ミラーを配設した可動部材と、
前記可動部材を揺動可能に支持する支持部材とを有し、
前記偏向ミラー駆動手段は、前記可動部材の持つ固有振動数に共振する共振周波数を除いた周波数領域で前記可動部材を揺動することを特徴とする請求項2から12のいずれか1項に記載の光走査装置。 - 光導電性の像担保体を帯電し、該像担保体に静電潜像の書込みを行い、形成された静電潜像を現像して可視化し、この可視像を記録材に転写し、定着する方式の画像形成装置において、
前記像担保体への静電潜像の書込みに、請求項1から13のいずれか1項に記載の光走査装置を用いたことを特徴とする画像形成装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110000A JP2005292628A (ja) | 2004-04-02 | 2004-04-02 | 光走査装置、画像形成装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004110000A JP2005292628A (ja) | 2004-04-02 | 2004-04-02 | 光走査装置、画像形成装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005292628A true JP2005292628A (ja) | 2005-10-20 |
Family
ID=35325590
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004110000A Pending JP2005292628A (ja) | 2004-04-02 | 2004-04-02 | 光走査装置、画像形成装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005292628A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007298624A (ja) * | 2006-04-28 | 2007-11-15 | Sumitomo Precision Prod Co Ltd | Memsデバイス |
| JP2008281755A (ja) * | 2007-05-10 | 2008-11-20 | Brother Ind Ltd | 光走査装置及び印刷装置 |
| JP2018066969A (ja) * | 2016-10-21 | 2018-04-26 | 川崎重工業株式会社 | 光照射装置及び光読取装置 |
-
2004
- 2004-04-02 JP JP2004110000A patent/JP2005292628A/ja active Pending
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007298624A (ja) * | 2006-04-28 | 2007-11-15 | Sumitomo Precision Prod Co Ltd | Memsデバイス |
| JP2008281755A (ja) * | 2007-05-10 | 2008-11-20 | Brother Ind Ltd | 光走査装置及び印刷装置 |
| US7742214B2 (en) | 2007-05-10 | 2010-06-22 | Brother Kogyo Kabushiki Kaisha | Optical scanning device and printing apparatus |
| JP2018066969A (ja) * | 2016-10-21 | 2018-04-26 | 川崎重工業株式会社 | 光照射装置及び光読取装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5114175B2 (ja) | 光走査装置及びカラー画像形成装置 | |
| JP5078836B2 (ja) | 光走査装置および画像形成装置 | |
| JP5114178B2 (ja) | 光走査装置の調整方法 | |
| US8111276B2 (en) | Optical scanning device and image forming apparatus with a center adjusting mechanism | |
| JP2004074643A (ja) | 色ずれ補正方法、光書き込み装置及び画像形成装置 | |
| US8531499B2 (en) | Optical scanner and image forming apparatus including same | |
| US8159513B2 (en) | Image forming apparatus and control method for same | |
| JP2004037757A (ja) | 光走査装置および画像形成装置 | |
| JP2002096502A (ja) | 画像形成装置 | |
| JP4107578B2 (ja) | 画像形成装置 | |
| JP4830470B2 (ja) | 光走査装置、画像形成装置 | |
| JP2009034902A (ja) | 画像形成装置、走査光学装置及びその制御方法 | |
| JP5353739B2 (ja) | 光走査装置及び画像形成装置 | |
| JP2005292628A (ja) | 光走査装置、画像形成装置 | |
| JP4496789B2 (ja) | 光走査装置および画像形成装置 | |
| JPH1155472A (ja) | 多色画像形成装置 | |
| JP2005195869A (ja) | 光走査装置および画像形成装置 | |
| JP2010160491A (ja) | 光走査装置の調整方法 | |
| JP5470347B2 (ja) | 光走査装置及びこれを用いた画像形成装置 | |
| JP2008282021A (ja) | 光走査装置および画像形成装置 | |
| JP4572540B2 (ja) | 光走査装置および画像形成装置 | |
| JP2007185786A (ja) | 光走査装置及び該装置の制御方法 | |
| JP2002182139A (ja) | 光走査装置および画像形成装置 | |
| JP2011237666A (ja) | 光走査装置及びカラー画像形成装置 | |
| JP2005250289A (ja) | 光走査装置及び画像形成装置 |