JP2005291927A - センサ - Google Patents
センサ Download PDFInfo
- Publication number
- JP2005291927A JP2005291927A JP2004107606A JP2004107606A JP2005291927A JP 2005291927 A JP2005291927 A JP 2005291927A JP 2004107606 A JP2004107606 A JP 2004107606A JP 2004107606 A JP2004107606 A JP 2004107606A JP 2005291927 A JP2005291927 A JP 2005291927A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- signal
- sensor element
- change
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000008859 change Effects 0.000 claims abstract description 145
- 238000001514 detection method Methods 0.000 claims abstract description 126
- 229920000049 Carbon (fiber) Polymers 0.000 claims abstract description 33
- 239000004917 carbon fiber Substances 0.000 claims abstract description 33
- 230000010355 oscillation Effects 0.000 claims description 51
- 239000000835 fiber Substances 0.000 claims description 21
- 230000001629 suppression Effects 0.000 claims 1
- 239000012071 phase Substances 0.000 description 154
- VNWKTOKETHGBQD-UHFFFAOYSA-N methane Chemical compound C VNWKTOKETHGBQD-UHFFFAOYSA-N 0.000 description 20
- 230000003247 decreasing effect Effects 0.000 description 10
- 239000003990 capacitor Substances 0.000 description 7
- 238000010586 diagram Methods 0.000 description 7
- 230000010363 phase shift Effects 0.000 description 7
- 230000000694 effects Effects 0.000 description 5
- 238000004519 manufacturing process Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 239000002134 carbon nanofiber Substances 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 230000008878 coupling Effects 0.000 description 2
- 238000010168 coupling process Methods 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
- 230000003111 delayed effect Effects 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 239000000843 powder Substances 0.000 description 2
- MTPVUVINMAGMJL-UHFFFAOYSA-N trimethyl(1,1,2,2,2-pentafluoroethyl)silane Chemical compound C[Si](C)(C)C(F)(F)C(F)(F)F MTPVUVINMAGMJL-UHFFFAOYSA-N 0.000 description 2
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 1
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 1
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N Titan oxide Chemical compound O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 1
- NRTOMJZYCJJWKI-UHFFFAOYSA-N Titanium nitride Chemical compound [Ti]#N NRTOMJZYCJJWKI-UHFFFAOYSA-N 0.000 description 1
- XLOMVQKBTHCTTD-UHFFFAOYSA-N Zinc monoxide Chemical compound [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- HSFWRNGVRCDJHI-UHFFFAOYSA-N alpha-acetylene Natural products C#C HSFWRNGVRCDJHI-UHFFFAOYSA-N 0.000 description 1
- 229910003481 amorphous carbon Inorganic materials 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 239000002041 carbon nanotube Substances 0.000 description 1
- 229910021393 carbon nanotube Inorganic materials 0.000 description 1
- 239000011304 carbon pitch Substances 0.000 description 1
- 239000003575 carbonaceous material Substances 0.000 description 1
- 239000004020 conductor Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000010949 copper Substances 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- NKZSPGSOXYXWQA-UHFFFAOYSA-N dioxido(oxo)titanium;lead(2+) Chemical compound [Pb+2].[O-][Ti]([O-])=O NKZSPGSOXYXWQA-UHFFFAOYSA-N 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 230000001939 inductive effect Effects 0.000 description 1
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000003287 optical effect Effects 0.000 description 1
- 239000011295 pitch Substances 0.000 description 1
- 229920001197 polyacetylene Polymers 0.000 description 1
- 239000002861 polymer material Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 229920002050 silicone resin Polymers 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 238000001947 vapour-phase growth Methods 0.000 description 1
- 229910000859 α-Fe Inorganic materials 0.000 description 1
Images

Landscapes
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
Abstract
【解決手段】触覚センサ1は、太さがμm単位以下の寸法に形成されたコイル形状をなすコイル状炭素繊維が誘電性の媒体中に分散されることにより構成されるセンサ素子10と、センサ素子10に基準信号を出力する発振回路20と、基準信号の入力に対するセンサ素子10の抵抗成分及びリアクタンス成分のうち少なくとも一方の変化に基づくセンサ出力信号を検出する検波部35とを備える。
【選択図】 図3
Description
請求項1に記載の発明によれば、センサ素子は、コイル形状をなす炭素繊維が誘電性の媒体中に分散されることにより構成されている。このため、センサ素子は、電気的特性として抵抗成分とリアクタンス成分とを有する。しかも、センサ素子を構成する炭素繊維は非常に小さなコイル状に形成されている。このため、センサ素子に外力(本明細書においては、応力等の機械的な力、及び電磁波等の電気的な力の総称として用いる)が加わると、その外力の微小な変位や変動にも応答して、該センサ素子の抵抗成分及びリアクタンス成分のうち少なくとも一方が変化する。センサ出力信号は、これら変化に基づいて定まることから、センサ素子に加わる外力の微小な変化に応答して変化する。検出手段は、こうしたセンサ出力信号を検出するため、センサ素子に加わる外力の微小な変化を検出することができる。すなわち、検出手段はセンサ素子の被検出量の微小な変化を検出することができる。
<センサ素子の構造>
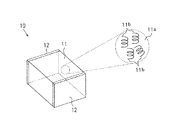
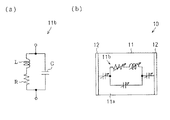
図1に示すように、センサ素子10は、略直方体状に形成されたセンサ本体11と、センサ本体11における対向する側面にそれぞれ固着された一対の電極12とから構成されている。これら電極12は、センサ本体11と電気的に接続されている。
このように構成されたセンサ素子10に例えば押圧力(外力)が加わった場合、コイル状炭素繊維11bのコイル長さは変化する。コイル状炭素繊維11bのコイル長さ、つまりコイルのピッチが変化することにより、R成分及びリアクタンス成分(L成分及びC成分)は変化する。また、センサ素子10の体積が変化することにより、結合容量も変化する。したがって、電極12を介してR成分やリアクタンス成分を検出することにより、センサ素子10に加わる外力を検出することができる。
<触覚センサの構成>
次に、センサ素子10を備える触覚センサについて説明する。
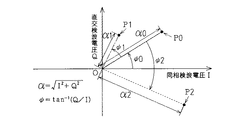
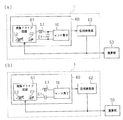
図4に示すように、センサ素子10に外力が加わっていない状態において、同相検波電圧IをX成分、直交検波電圧QをY成分として極座標表示すると(ポイントP0)、原点OからポイントP0までの仮想線のX軸に対する傾きは位相遅れψ0、原点OからポイントP0までの長さは振幅電圧αとなる。なお、本実施形態においては、移相器31により、センサ素子10に外力が加わっていない状態におけるセンサ出力信号の位相と同相信号の位相とは一致しているため、位相遅れψは「0[rad]」(ψ0=0[rad])となる。ここでは、説明の便宜上、ψ0を図面上に表示している。
センサ素子10は、非常に小さなコイル状炭素繊維11bが弾力性を有する媒体11a中に分散されることにより構成されている。このため、センサ素子10に外力が加わると、その外力の微小な変化により、媒体11aの体積が変化するとともに、コイル状炭素繊維11bは圧縮または伸張する。このようにコイル状炭素繊維11bの形状が変化することにより、コイル状炭素繊維11bが有するR成分及びリアクタンス成分は変化する。また、媒体11aの体積変化によりC成分が変化する。したがって、センサ素子10に加わる外力の微小な変化により、センサ素子10のR成分及びリアクタンス成分が変化する。
(1)センサ素子10を構成するコイル状炭素繊維11bは、繊維径が1nm〜10μm、コイル径が1nm〜50μm、コイル長さが10nm〜10mmとなるように形成されている。このため、センサ素子10は、センサ素子10に加わる外力の微小な変化にも応答して、そのR成分及びリアクタンス成分を変化させる。検波部35は、これらR成分やリアクタンス成分に基づいて変化するセンサ出力信号を検波する。したがって、触覚センサ1に加わる外力の微小な変化を検出することができる。
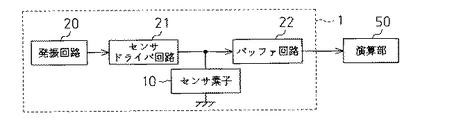
・前記実施形態において、移相器31には、発振回路20から基準信号が入力されている。しかし、移相器31には、発振回路20に代わってセンサドライバ回路21から基準信号に相当する信号が入力されてもよい。この場合、発振回路20及びセンサドライバ回路21が基準信号入力手段に相当する。このようにしても、基準信号に基づいてセンサ出力信号を検波することができる。
この場合、演算部50には前記同相検波電圧I(=α・cos(ψ))のみが入力されることとなるものの、該演算部50は、該同相検波電圧Iにおける振幅電圧αの変化量を近似的に求めることが可能となる。つまり、演算部50は、リアクタンス成分の変化量については算出できないものの、R成分の変化量を近似的に算出することが可能となる。よって、こうした変更態様においても、演算部50は、R成分の変化量に基づき、触覚センサ1に加わる外力の微小な変化を検出することが可能となる。しかも、このようにすれば、触覚センサ1の構成を簡単にすることができる。
・本発明によるセンサは、触覚センサ1以外の用途にも適用することができる。例えば、本発明のセンサは、歪センサ、微振動センサ、味覚センサ、光センサ、電磁波センサ、超音波センサ、温度センサ、湿度センサ、流量センサ、加速度センサ、角速度センサ等にも適用することができる。要するに、センサ素子10のR成分、L成分、及びC成分のいずれかを変動させる被検出量であれば、本センサにより検出することが可能である。
(1)請求項1に記載のセンサにおいて、前記検出手段は、前記センサ素子の端子間における電圧を前記センサ出力信号として検出すること。
Claims (10)
- 太さがμm単位以下の寸法に形成されたコイル形状をなす炭素繊維が誘電性の媒体中に分散されることにより構成されるセンサ素子と、
前記センサ素子に基準信号を出力する基準信号入力手段と、
前記基準信号の入力に対する前記センサ素子の抵抗成分及びリアクタンス成分のうち少なくとも一方の変化に基づくセンサ出力信号を検出する検出手段とを備えるセンサ。 - 前記基準信号は、時間の経過とともに振幅が変化する交流信号であり、
前記検出手段は、前記基準信号に基づく検波基準信号を用いて前記センサ出力信号を検波する請求項1に記載のセンサ。 - 前記検出手段は、前記検波基準信号の振幅及び位相のうち少なくとも一方を調整する信号調整手段を備える請求項2に記載のセンサ。
- 前記信号調整手段は、前記検波基準信号を移相させることにより、前記センサ素子の抵抗成分及びリアクタンス成分が変化しない状態における前記センサ出力信号に前記検波基準信号の位相を一致させる移相器を備える請求項3に記載のセンサ。
- 前記検出手段は、前記検波基準信号と前記センサ出力信号とを比較することにより前記センサ出力信号を検波し、両信号間の位相差を検出する請求項3または請求項4に記載のセンサ。
- 前記信号調整手段は、前記センサ素子の抵抗成分及びリアクタンス成分が変化しない状態における前記センサ出力信号に対して90°の位相差となるように前記検波基準信号を移相させて、直交信号を生成する直交用移相器を備え、
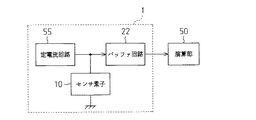
前記検出手段は、前記検波基準信号を用いて前記センサ出力信号を検波する第1検波器と、前記直交信号を用いて前記センサ出力信号を検波する第2検波器とを備える請求項3または請求項4に記載のセンサ。 - 前記基準信号入力手段と前記センサ素子とは、該センサ素子のリアクタンス成分の変化により周波数が変動し、該センサ素子の抵抗成分の変化により振幅が変動する発振信号を出力する発振部を構成し、
前記検出手段は、前記発振信号の周波数及び振幅のうち少なくとも一方を検出する請求項1に記載のセンサ。 - 前記基準信号入力手段は、前記発振信号の周波数を変化させるリアクタンス調整手段を備え、前記発振信号の周波数を変化させる旨の制御信号が入力された際には前記リアクタンス調整手段により前記発振信号の周波数を調整し、
前記検出手段は、前記発振信号の周波数の変化量を検出する位相検波器を備え、該変化量を前記センサ素子におけるリアクタンス成分の変化として検出するとともに、該変化量に基づいて該周波数の変化を抑制するべく前記制御信号を出力する請求項7に記載のセンサ。 - 太さがμm単位以下の寸法に形成された弾力性を有する導電性繊維が誘電性の媒体中に分散されることにより構成されるセンサ素子と、
前記センサ素子に基準信号を出力する基準信号入力手段と、
前記基準信号の入力に対する前記センサ素子の抵抗成分及びリアクタンス成分のうち少なくとも一方の変化に基づくセンサ出力信号を検出する検出手段とを備えるセンサ。 - 抵抗成分及びリアクタンス成分を有し、被検出量の変化に基づいて抵抗成分及びリアクタンス成分のうち少なくとも一方が変化するセンサ素子と、
前記センサ素子に交流信号を出力する基準信号入力手段と、
前記センサ素子の抵抗成分及びリアクタンス成分が変化しない状態において、前記交流信号の入力に対する前記センサ素子の抵抗成分及びリアクタンス成分のうち少なくとも一方の変化に基づくセンサ出力信号に対して90°の位相差となるように前記交流信号を移相させて、直交信号を生成する直交用移相器を備え、
前記交流信号に基づく検波基準信号を用いて前記センサ出力信号を検波する第1検波器と、
前記直交信号を用いて前記センサ出力信号を検波する第2検波器とを備えるセンサ。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004107606A JP2005291927A (ja) | 2004-03-31 | 2004-03-31 | センサ |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004107606A JP2005291927A (ja) | 2004-03-31 | 2004-03-31 | センサ |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005291927A true JP2005291927A (ja) | 2005-10-20 |
Family
ID=35325014
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004107606A Pending JP2005291927A (ja) | 2004-03-31 | 2004-03-31 | センサ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005291927A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007086358A1 (ja) * | 2006-01-24 | 2007-08-02 | Shimadzu Corporation | 接近及び接触センサ及びセンサ素子 |
| JP2007201641A (ja) * | 2006-01-24 | 2007-08-09 | Gifu Univ | 接近センサ及び接近・接触センサ |
| JP2008082711A (ja) * | 2006-09-25 | 2008-04-10 | Gifu Univ | センサ素子、物体検知センサ及び物体検知センサを用いた物体検知方法 |
| JP2010271087A (ja) * | 2009-05-19 | 2010-12-02 | Nippon Telegr & Teleph Corp <Ntt> | 測定装置 |
| US7868628B2 (en) | 2007-08-16 | 2011-01-11 | Tdk Corporation | Tactile sensor utilizing microcoils with spiral shape |
| JP2013115682A (ja) * | 2011-11-30 | 2013-06-10 | Pentel Corp | 静電容量結合方式静電センサー |
| JP2013135346A (ja) * | 2011-12-27 | 2013-07-08 | Pentel Corp | 静電容量結合方式静電センサー |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62127628A (ja) * | 1985-11-29 | 1987-06-09 | Anritsu Corp | Sawフオ−スセンサ |
| JPS634601A (ja) * | 1986-06-25 | 1988-01-09 | 横浜ゴム株式会社 | 感圧導電ゴムの交流駆動方法 |
| JPH02293620A (ja) * | 1989-05-08 | 1990-12-04 | Murata Mfg Co Ltd | 振動ジャイロ |
| JPH07248270A (ja) * | 1994-03-09 | 1995-09-26 | Omron Corp | 信号処理装置及び切削工具用状態検出装置 |
| JPH10256003A (ja) * | 1997-03-07 | 1998-09-25 | Thueringisches Inst Fuer Textil & Kunststoff Forsch Ev | センサー材料の製造方法 |
| JP2000027072A (ja) * | 1998-07-10 | 2000-01-25 | Seiji Motojima | コイル状炭素繊維、その製造方法及び電磁波シールド材 |
| JP2001146645A (ja) * | 1999-11-19 | 2001-05-29 | Seiji Motojima | 強磁性を有するコイル状炭素繊維複合体、その製造方法及び電波吸収体 |
| JP2001336995A (ja) * | 2000-05-30 | 2001-12-07 | Mitsubishi Electric Corp | トルク検出装置 |
| JP2002134325A (ja) * | 2000-07-08 | 2002-05-10 | Lg Electronics Inc | カーボンナノチューブ及び/またはカーボンナノファイバーを利用したインダクター |
| JP2002236059A (ja) * | 2001-02-08 | 2002-08-23 | Univ Tokyo | 触覚センサ、触覚センサユニット、触覚センサの使用方法、触覚センサユニットの使用方法、及び触覚センサユニットの製造方法 |
| JP2004045277A (ja) * | 2002-07-12 | 2004-02-12 | Suzuki Co Ltd | アクチュエータの荷重検出方法 |
-
2004
- 2004-03-31 JP JP2004107606A patent/JP2005291927A/ja active Pending
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS62127628A (ja) * | 1985-11-29 | 1987-06-09 | Anritsu Corp | Sawフオ−スセンサ |
| JPS634601A (ja) * | 1986-06-25 | 1988-01-09 | 横浜ゴム株式会社 | 感圧導電ゴムの交流駆動方法 |
| JPH02293620A (ja) * | 1989-05-08 | 1990-12-04 | Murata Mfg Co Ltd | 振動ジャイロ |
| JPH07248270A (ja) * | 1994-03-09 | 1995-09-26 | Omron Corp | 信号処理装置及び切削工具用状態検出装置 |
| JPH10256003A (ja) * | 1997-03-07 | 1998-09-25 | Thueringisches Inst Fuer Textil & Kunststoff Forsch Ev | センサー材料の製造方法 |
| JP2000027072A (ja) * | 1998-07-10 | 2000-01-25 | Seiji Motojima | コイル状炭素繊維、その製造方法及び電磁波シールド材 |
| JP2001146645A (ja) * | 1999-11-19 | 2001-05-29 | Seiji Motojima | 強磁性を有するコイル状炭素繊維複合体、その製造方法及び電波吸収体 |
| JP2001336995A (ja) * | 2000-05-30 | 2001-12-07 | Mitsubishi Electric Corp | トルク検出装置 |
| JP2002134325A (ja) * | 2000-07-08 | 2002-05-10 | Lg Electronics Inc | カーボンナノチューブ及び/またはカーボンナノファイバーを利用したインダクター |
| JP2002236059A (ja) * | 2001-02-08 | 2002-08-23 | Univ Tokyo | 触覚センサ、触覚センサユニット、触覚センサの使用方法、触覚センサユニットの使用方法、及び触覚センサユニットの製造方法 |
| JP2004045277A (ja) * | 2002-07-12 | 2004-02-12 | Suzuki Co Ltd | アクチュエータの荷重検出方法 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007086358A1 (ja) * | 2006-01-24 | 2007-08-02 | Shimadzu Corporation | 接近及び接触センサ及びセンサ素子 |
| JP2007201641A (ja) * | 2006-01-24 | 2007-08-09 | Gifu Univ | 接近センサ及び接近・接触センサ |
| US8203349B2 (en) | 2006-01-24 | 2012-06-19 | Shimadzu Corporation | Proximity and contact sensor and sensor element |
| JP2008082711A (ja) * | 2006-09-25 | 2008-04-10 | Gifu Univ | センサ素子、物体検知センサ及び物体検知センサを用いた物体検知方法 |
| US7868628B2 (en) | 2007-08-16 | 2011-01-11 | Tdk Corporation | Tactile sensor utilizing microcoils with spiral shape |
| US8072227B2 (en) | 2007-08-16 | 2011-12-06 | Tdk Corporation | Method for manufacturing tactile-sensitive material utilizing microcoils |
| JP2010271087A (ja) * | 2009-05-19 | 2010-12-02 | Nippon Telegr & Teleph Corp <Ntt> | 測定装置 |
| JP2013115682A (ja) * | 2011-11-30 | 2013-06-10 | Pentel Corp | 静電容量結合方式静電センサー |
| JP2013135346A (ja) * | 2011-12-27 | 2013-07-08 | Pentel Corp | 静電容量結合方式静電センサー |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8823394B2 (en) | Apparatus for capacitively measuring changes | |
| JP5284911B2 (ja) | 静電容量型物理量センサ及び角速度センサ | |
| JP6343984B2 (ja) | 非接触電圧計測装置 | |
| CN101918804B (zh) | 压电振动型力传感器 | |
| US20140152327A1 (en) | Capacitive Proximity Sensor As Well As Method For Capacitive Approximation Detection | |
| US9791522B2 (en) | Magnetic field detection sensor | |
| CN110461214A (zh) | 测量身体中的性质 | |
| CN103787266B (zh) | 机械部件、机械系统和用于运行机械部件的方法 | |
| JP2005291927A (ja) | センサ | |
| JP5711368B2 (ja) | 磁界検出方法及び磁界検出回路 | |
| JP2017503178A (ja) | 容量結合ソース電極を有する圧力変換器 | |
| JP4406567B2 (ja) | 発振器により給電されるセンサの出力電圧を整流するための回路装置 | |
| US7343802B2 (en) | Dynamic-quantity sensor | |
| US7997135B2 (en) | Angular velocity sensor | |
| US11940503B2 (en) | Magnetic sensor circuit and magnetic field detection device | |
| JP6981711B2 (ja) | 非接触型検電器 | |
| Wen et al. | Frequency adaptive driver for ultrasonic vibrators with motional current feedback | |
| JP2021025820A (ja) | 磁界検出センサ | |
| JP6801414B2 (ja) | 水分量検出器 | |
| JP6273443B2 (ja) | 物理量計測回路を用いた物理量計測方法 | |
| JP2017009414A (ja) | 圧電センサ | |
| CN117129021A (zh) | 一种可实现按压保持的pvdf压电传感器装置 | |
| JP2017083331A (ja) | 静電容量検出装置、及びセンサシステム | |
| JP2013044527A (ja) | 物理量検出センサーおよび電子機器 | |
| Wena et al. | Frequency Adaptive Driver for Ultrasonic Vibrators with Motional Current Feedback1 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060613 |
|
| A621 | Written request for application examination |
Effective date: 20070326 Free format text: JAPANESE INTERMEDIATE CODE: A621 |
|
| A521 | Written amendment |
Effective date: 20070326 Free format text: JAPANESE INTERMEDIATE CODE: A821 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090917 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20091201 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100201 |
|
| A131 | Notification of reasons for refusal |
Effective date: 20100302 Free format text: JAPANESE INTERMEDIATE CODE: A131 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100430 |
|
| A02 | Decision of refusal |
Effective date: 20100615 Free format text: JAPANESE INTERMEDIATE CODE: A02 |