JP2005291788A - 車両用物体認識装置 - Google Patents
車両用物体認識装置 Download PDFInfo
- Publication number
- JP2005291788A JP2005291788A JP2004104120A JP2004104120A JP2005291788A JP 2005291788 A JP2005291788 A JP 2005291788A JP 2004104120 A JP2004104120 A JP 2004104120A JP 2004104120 A JP2004104120 A JP 2004104120A JP 2005291788 A JP2005291788 A JP 2005291788A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- recognition
- range
- transmission wave
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000001514 detection method Methods 0.000 claims abstract description 26
- 230000001678 irradiating effect Effects 0.000 claims abstract description 9
- 230000005540 biological transmission Effects 0.000 claims description 39
- 230000003247 decreasing effect Effects 0.000 abstract 1
- 230000003287 optical effect Effects 0.000 description 48
- 238000000034 method Methods 0.000 description 36
- 230000008569 process Effects 0.000 description 24
- 238000004364 calculation method Methods 0.000 description 18
- 238000005259 measurement Methods 0.000 description 12
- 238000000605 extraction Methods 0.000 description 11
- 238000012545 processing Methods 0.000 description 11
- 238000013459 approach Methods 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 230000008859 change Effects 0.000 description 4
- 230000011218 segmentation Effects 0.000 description 4
- 230000035945 sensitivity Effects 0.000 description 4
- 238000012935 Averaging Methods 0.000 description 3
- 230000002159 abnormal effect Effects 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 229910052739 hydrogen Inorganic materials 0.000 description 2
- 230000010354 integration Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 241000282326 Felis catus Species 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000004141 dimensional analysis Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000002310 reflectometry Methods 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
Images





Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S7/00—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00
- G01S7/48—Details of systems according to groups G01S13/00, G01S15/00, G01S17/00 of systems according to group G01S17/00
- G01S7/497—Means for monitoring or calibrating
- G01S7/4972—Alignment of sensor
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
- G01S17/931—Lidar systems specially adapted for specific applications for anti-collision purposes of land vehicles
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Computer Networks & Wireless Communication (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Electromagnetism (AREA)
- Traffic Control Systems (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Instrument Panels (AREA)
- Controls For Constant Speed Travelling (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
【解決手段】 低速状態もしくは近距離状態であることが検出された場合に、通常走行時の場合と比べて上方にレーザ光が照射されるようにする。例えば、ポリゴンミラーの各側面のうち認識使用範囲に相当するものが面番号4、5、6であったとすると、低速状態もしくは近距離状態のときには、その面番号を1つ減らし、認識使用範囲を面番号3、4、5に切り替える。これにより、トラック等と自車両との距離が近づいたとしても、レーザ光が上方に照射され、高い位置のリフレクタに当たるようにすることが可能となる。したがって、トラック等と自車両との距離が近づいて、レーザ光がリフレクタに当たらなくなり、突然距離検出が正確に行えなくなるという状態を防ぐことができる。
【選択図】 図16
Description
したがって、トラック等と自車両との距離が近づいて、レーザ光がリフレクタに当たらなくなり、突然距離検出が正確に行えなくなるという状態を防ぐことができる。
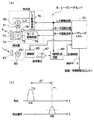
以下に、本発明による車両用物体認識装置が適用された車両制御装置1について、図面とともに説明する。この車両制御装置1は、自動車に搭載され、警報すべき領域に障害物が存在する場合に警報を出力したり、前車(先行車両)に合わせて車速を制御したりする装置である。
今回の車両形状確率←前回値×α+今回の瞬時値×(1−α)
なお、初期値は50%とし、αは例えば0.8といった値を採用する。また、車両形状確率の瞬時値は、相対加速度、縦横の長さD,W、検出時間などに基づいて算出する。なお、この車両形状確率の算出方法は、特開2002−40139の段落番号0045から0049に詳しく記載されているため、これ以上の説明は省略する。
自車線確率←自車線確率前回値×α+自車線確率瞬時値×(1−α)
ここで、αは一定値でも良いし、物標モデルとの距離や物標モデルが存在する領域に応じて変化するものであっても良い。なお、自車線確率の算出方法についても、特開2002−40139の段落番号0050から0056に詳しく記載されているため、これ以上の詳細な説明は省略する。
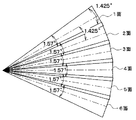
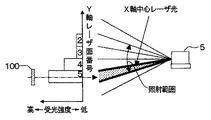
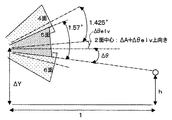
図11に示すように、本実施形態においては、Y軸方向のレーザ光の広がり角は1.57degであり、tan(1.57deg)≒1/37となる。また、中心レーザ光下側のレーザ光のみの広がり角度、すなわち重複領域を除くレーザ光の広がり角度は、1.57−0.145=1.425degであり、tan(1.425deg)≒1/40となる。
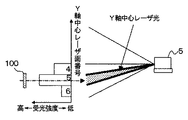
光軸上向き判定がなされている場合には、上述したように、Y軸中心レーザ光の下端がほぼ水平に近くなる場合がある。従って、図11に示す例では、Y軸中心レーザ光である5面のレーザ光及びその上側に照射される4面のレーザ光の照射方向は、上方に広がるようになる。ここで、道路上方には標識や看板等の物体が多数設置されており、上方に広がる4面及び5面のレーザ光によって、それらの物体による反射光を受光しやすくなる。上記の(2)の条件は、そのような道路上方の物体からの反射光を受光する可能性がある場合に成立するものである。
光軸下向き判定がなされている場合には、光軸上向き判定の場合とは逆に、Y軸中心レーザ光の上端が水平に近づく場合がある。従って、図11に示す例では、Y軸中心レーザ光である5面のレーザ光及びその下側に照射される6面のレーザ光の照射方向は、下方に広がり、路面や路面上の低い位置にある物体からの反射光を受光しやすくなる。上記の(3)の条件は、そのような路面や路面上の低い位置にある物体からの反射光を受光する可能性がある場合に成立するものである。
光軸下向き判定がなされた場合、Y軸中心レーザ光の上側のレーザ光(4面のレーザ光)は、水平よりも上方ではあるが、相対的に水平方向に近い向きに照射される。このような場合であっても、プリ物標との距離Zが上記の式を満足する場合には、4面のレーザ光の上端は少なくとも最も高い車高以上の高さに達している。また、4面のレーザ光に対して反射光が生じ、Y軸中心レーザ光である5面のレーザ光によって反射光が生じていないのであるから、その反射光を生じているプリ物標は路面上の非常に高い位置にあると推測できる。このため、(4)の条件が成立した場合には、プリ物標が、標識や看板等の車両以外の物体である可能性があると推測できるのである。
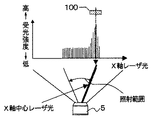
上記所定角度Θの設定方法について説明する。まず、Y軸中心レーザ光である5面のレーザ光下端の、所定の近距離lにおける基準照射高さhを定める(例えば地上から30cm)。この基準照射高さhに基づき、数式3によって所定角度Θを演算する。
Θ=tan−1(ΔY−h)/l
水平方向と5面のレーザ光の下端とのなす角度Δθが、このように設定した所定角度Θ以上である場合、上述したように基準照射高さhは、比較的低い位置に設定されるので、5面のレーザ光の照射範囲が少なくとも距離l以上においては地上高30cmの対象物をカバーすることになる。換言すれば、距離l以内において、6面のレーザ光のみに対して反射光が生じている場合、その反射物の高さは、せいぜい基準照射高さh程度の高さしか持たないことになる。
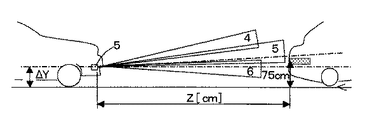
θu[LSB=0.01deg]=(リフレクタの検出面番号−5)×1.425[deg] −ΔA[deg]+tan-1(75[cm]−ΔY[cm])/Z[cm]
なお、リフレクタの検出面番号とは、図15に示すように、学習対象候補となる乗用車に設けられたリフレクタからの反射光を生じさせるレーザ光の面番号である。本実施形態では、その検出面番号として、4(上面)、4.5(上面と中面の中間),5(中面),5.5(中面と下面の中間),6(下面)のいずれかの値となる。ちなみに、図15に示す例では、リフレクタの検出面番号は、5.5(中面と下面の中間)である。
Nu=Nu+1
なお、本発明はこのような実施形態に何等限定されるものではなく、本発明の主旨を逸脱しない範囲において種々なる形態で実施し得る。
Claims (8)
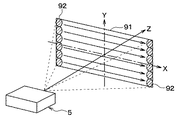
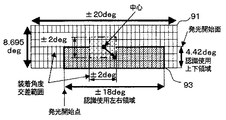
- 車両の高さ方向において、複数の角度範囲に渡って送信波を照射可能なスキャン手段(73)を有しており、前記スキャン手段にて照射可能な前記複数の角度範囲から設定された認識使用範囲(93)において前記送信波を照射するすると共に、反射物体での前記送信波の反射波を受信するレーダユニット(5)と、
前記認識使用範囲を設定し、前記スキャン手段から前記認識使用範囲において前記送信波が照射されるようにする認識使用範囲設定手段(30)と、
前記レーダユニットの送受信結果に基づいて、前記反射物体を認識する認識手段(3)とを備えた車両用物体認識装置において、
前記車両の車速を検出する車速検出手段(47)と、
前記車速検出手段によって検出された車速が所定車速よりも小さい低速状態のときに、前記認識使用範囲の切り替えを行い、この切り替え以前に設定されていた前記認識使用範囲よりも前記車両の上方に前記送信波が照射されるように、前記スキャン手段にて照射可能な前記複数の角度範囲から新たな認識使用範囲を設定する認識使用範囲切替手段(200〜230)と、を備えていることを特徴とする車両用物体認識装置。 - 前記認識手段によって認識された反射物体が先行車両であることを判定すると共に、前記先行車両までの車間距離(Z)を求める先行車判定手段(53)を有し、
前記認識使用範囲切替手段は、前記先行車判定手段によって検出された前記先行車両までの車間距離が所定値よりも小さい近距離状態のときに、前記認識使用範囲の切り替えを行い、この切り替え以前に設定されていた前記認識使用範囲よりも前記車両の上方に前記送信波が照射されるように、前記スキャン手段にて照射可能な前記複数の角度範囲から新たな認識使用範囲を設定するようになっていることを特徴とする請求項1に記載の車両用物体認識装置。 - 車両の高さ方向において、複数の角度範囲に渡って送信波を照射可能なスキャン手段(73)を有しており、前記スキャン手段にて照射可能な前記複数の角度範囲から設定された認識使用範囲(93)において前記送信波を照射するすると共に、反射物体での前記送信波の反射波を受信するレーダユニット(5)と、
前記認識使用範囲を設定し、前記スキャン手段から前記認識使用範囲において前記送信波が照射されるようにする認識使用範囲設定手段(30)と、
前記レーダユニットの送受信結果に基づいて、前記反射物体を認識する認識手段(3)とを備えた車両用物体認識装置において、
前記認識手段によって認識された反射物体が先行車両であることを判定すると共に、前記先行車両までの車間距離(Z)を求める先行車判定手段(53)と、
前記先行車判定手段によって検出された前記先行車両までの車間距離が所定値よりも小さい近距離状態のときに、前記認識使用範囲の切り替えを行い、この切り替え以前に設定されていた前記認識使用範囲よりも前記車両の上方に前記送信波が照射されるように、前記スキャン手段にて照射可能な前記複数の角度範囲から新たな認識使用範囲を設定する認識使用範囲切替手段(200〜230)と、を備えていることを特徴とする車両用物体認識装置。 - 前記スキャン手段は、面倒れ角が異なる複数の側面を有する多面ミラーであり、前記送信波を前記多面ミラーの各側面で反射することによって、前記車両の高さ方向において前記送信波を照射するようになっており、
前記認識使用範囲設定手段は、前記多面ミラーの各側面の面倒れ角に応じた面番号を記憶し、前記多面ミラーの各側面のうち前記認識使用範囲に相当する面番号のもので前記送信波を反射させることにより、前記認識使用範囲における前記送信波の照射を行うようになっており、
前記認識使用範囲切替手段は、前記多面ミラーの各側面のうち前記認識使用範囲設定手段に記憶された面番号のものと比べ、前記送信波が前記車両の上方に照射されるものの面番号を前記新たな認識使用範囲に相当する面番号として、前記多面ミラーにおける切り替え後の面番号の各側面で前記送信波が照射されるようにすることを特徴とする請求項1ないし3のいずれか1つに記載の車両用物体認識装置。 - 前記多面ミラーの各側面には、前記送信波を前記車両の高さ方向の一番上方に照射する側面から順に面番号が付けられており、
前記認識使用範囲切替手段は、切り替え前の前記認識使用範囲に相当する面番号と比べて、前記送信波を前記車両の高さ方向の上方にする面番号に切り替えるようになっていることを特徴とする請求項4に記載の車両用物体認識装置。 - 前記認識使用範囲設定手段は、前記認識使用範囲に相当する面番号として、前記車両の前方方向に対して所定の基準角度(ΔA)が含まれる面番号のものと、その面番号の両側の面番号の3つを設定し、
前記認識範囲切替手段は、切り替え前の前記認識使用範囲に相当する面番号と比べて、前記送信波を前記車両の高さ方向の上方にする面番号のものと、前記所定の基準角度(ΔA)が含まれる面番号のものとに切り替えるようになっていることを特徴とする請求項5に記載の車両用物体認識装置。 - 前記多面ミラーの各側面には、前記送信波を前記車両の高さ方向の一番上方に照射する側面から順に面番号が付けられており、
前記認識使用範囲切替手段は、切り替え前の前記認識使用範囲に相当する面番号に対して、面番号を1つ減少または増加させるようになっていることを特徴とする請求項4または5に記載の車両用物体認識装置。 - 前記多面ミラーの各側面には、前記送信波を前記車両の高さ方向の一番上方に照射する側面から順に面番号が付けられており、
前記認識使用範囲設定手段は、前記各側面のうち面番号が連続する所定個数を前記認識使用範囲に相当するものとして設定し、
前記認識範囲切替手段は、切り替え前の前記認識使用範囲に相当する複数の連続した面番号それぞれに対して、面番号を1つ減少または増加させるようになっていることを特徴とする請求項4または5に記載の車両用物体認識装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004104120A JP2005291788A (ja) | 2004-03-31 | 2004-03-31 | 車両用物体認識装置 |
| US11/093,836 US20050219506A1 (en) | 2004-03-31 | 2005-03-30 | Object recognition device for vehicle |
| DE102005014721A DE102005014721A1 (de) | 2004-03-31 | 2005-03-31 | Objekterkennungsvorrichtung für Fahrzeuge |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004104120A JP2005291788A (ja) | 2004-03-31 | 2004-03-31 | 車両用物体認識装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005291788A true JP2005291788A (ja) | 2005-10-20 |
Family
ID=35034293
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004104120A Pending JP2005291788A (ja) | 2004-03-31 | 2004-03-31 | 車両用物体認識装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20050219506A1 (ja) |
| JP (1) | JP2005291788A (ja) |
| DE (1) | DE102005014721A1 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013146375A1 (ja) * | 2012-03-28 | 2013-10-03 | 株式会社デンソー | 車載用レーダ装置及びその物標検出方法 |
| JP2018059847A (ja) * | 2016-10-06 | 2018-04-12 | オムロンオートモーティブエレクトロニクス株式会社 | レーザレーダ装置 |
| WO2019138964A1 (ja) * | 2018-01-09 | 2019-07-18 | パイオニア株式会社 | 制御装置、走査装置、制御方法、プログラム及び記憶媒体 |
| JP2021148562A (ja) * | 2020-03-18 | 2021-09-27 | 株式会社Soken | レーダ装置 |
| US11525891B2 (en) * | 2019-07-08 | 2022-12-13 | Lg Electronics Inc. | System for identifying vehicle using laser sensor |
| WO2022270103A1 (ja) * | 2021-06-23 | 2022-12-29 | 株式会社デンソー | 光軸調整方法、レーザレーダ装置および光軸調整システム |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005043080A (ja) * | 2003-07-23 | 2005-02-17 | Fujitsu Ten Ltd | 車両用レーダの取付方法、及び車両用レーダ |
| JP4846545B2 (ja) * | 2006-11-29 | 2011-12-28 | 株式会社デンソー | 運転支援装置 |
| JP5152840B2 (ja) * | 2007-11-07 | 2013-02-27 | オムロンオートモーティブエレクトロニクス株式会社 | 車載用レーダ装置 |
| KR20140019501A (ko) * | 2012-08-06 | 2014-02-17 | 현대자동차주식회사 | 장애물 인식을 위한 분류기의 생성방법 |
| EP2735887B1 (de) | 2012-11-22 | 2015-06-03 | Sick Ag | Optische Erfassungsvorrichtung |
| DE102013011853A1 (de) * | 2013-07-16 | 2015-01-22 | Valeo Schalter Und Sensoren Gmbh | Optoelektronische Detektionseinrichtung und Verfahren zur abtastenden Erfassung der Umgebung eines Kraftfahrzeugs |
| KR101550972B1 (ko) * | 2013-09-25 | 2015-09-07 | 현대자동차주식회사 | 레이저 스캐너를 이용하여 장애물을 인식하기 위한 특징점 추출 장치 및 방법 |
| KR101632873B1 (ko) * | 2014-09-05 | 2016-07-01 | 현대모비스 주식회사 | 장애물 검출 시스템 및 방법 |
| US20190187259A1 (en) * | 2016-08-31 | 2019-06-20 | Pioneer Corporation | Measuring device, control device, control method, and program |
| CN110352361A (zh) * | 2017-03-31 | 2019-10-18 | 华为技术有限公司 | 用人眼安全图案扫描和测距的设备及方法 |
| US11460550B2 (en) | 2017-09-19 | 2022-10-04 | Veoneer Us, Llc | Direct detection LiDAR system and method with synthetic doppler processing |
| US11194022B2 (en) | 2017-09-29 | 2021-12-07 | Veoneer Us, Inc. | Detection system with reflection member and offset detection array |
| US11585901B2 (en) | 2017-11-15 | 2023-02-21 | Veoneer Us, Llc | Scanning lidar system and method with spatial filtering for reduction of ambient light |
| US11977185B1 (en) * | 2019-04-04 | 2024-05-07 | Seyond, Inc. | Variable angle polygon for use with a LiDAR system |
| US11579257B2 (en) | 2019-07-15 | 2023-02-14 | Veoneer Us, Llc | Scanning LiDAR system and method with unitary optical element |
| US11474218B2 (en) | 2019-07-15 | 2022-10-18 | Veoneer Us, Llc | Scanning LiDAR system and method with unitary optical element |
| US11313969B2 (en) | 2019-10-28 | 2022-04-26 | Veoneer Us, Inc. | LiDAR homodyne transceiver using pulse-position modulation |
| JP7401273B2 (ja) * | 2019-11-26 | 2023-12-19 | 日立Astemo株式会社 | 移動体の制御装置及び方法 |
| US12044800B2 (en) | 2021-01-14 | 2024-07-23 | Magna Electronics, Llc | Scanning LiDAR system and method with compensation for transmit laser pulse effects |
| US11326758B1 (en) | 2021-03-12 | 2022-05-10 | Veoneer Us, Inc. | Spotlight illumination system using optical element |
| WO2022225859A1 (en) | 2021-04-22 | 2022-10-27 | Innovusion, Inc. | A compact lidar design with high resolution and ultra-wide field of view |
| US11732858B2 (en) | 2021-06-18 | 2023-08-22 | Veoneer Us, Llc | Headlight illumination system using optical element |
| US12092278B2 (en) | 2022-10-07 | 2024-09-17 | Magna Electronics, Llc | Generating a spotlight |
| US12228653B2 (en) | 2022-10-07 | 2025-02-18 | Magna Electronics, Llc | Integrating a sensing system into headlight optics |
| US12202396B1 (en) | 2023-12-19 | 2025-01-21 | Magna Electronics, Llc | Line-scan-gated imaging for LiDAR headlight |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3259475B2 (ja) * | 1993-10-27 | 2002-02-25 | ミノルタ株式会社 | 距離測定装置 |
| JP2000147124A (ja) * | 1998-11-12 | 2000-05-26 | Denso Corp | 車載レーダ装置 |
| JP3772969B2 (ja) * | 2001-10-16 | 2006-05-10 | オムロン株式会社 | 車載用レーダ装置 |
| JP2003149338A (ja) * | 2001-11-09 | 2003-05-21 | Denso Corp | 物体認識装置及び距離測定装置 |
-
2004
- 2004-03-31 JP JP2004104120A patent/JP2005291788A/ja active Pending
-
2005
- 2005-03-30 US US11/093,836 patent/US20050219506A1/en not_active Abandoned
- 2005-03-31 DE DE102005014721A patent/DE102005014721A1/de not_active Withdrawn
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013146375A1 (ja) * | 2012-03-28 | 2013-10-03 | 株式会社デンソー | 車載用レーダ装置及びその物標検出方法 |
| JP2018059847A (ja) * | 2016-10-06 | 2018-04-12 | オムロンオートモーティブエレクトロニクス株式会社 | レーザレーダ装置 |
| WO2019138964A1 (ja) * | 2018-01-09 | 2019-07-18 | パイオニア株式会社 | 制御装置、走査装置、制御方法、プログラム及び記憶媒体 |
| US11525891B2 (en) * | 2019-07-08 | 2022-12-13 | Lg Electronics Inc. | System for identifying vehicle using laser sensor |
| JP2021148562A (ja) * | 2020-03-18 | 2021-09-27 | 株式会社Soken | レーダ装置 |
| JP7477329B2 (ja) | 2020-03-18 | 2024-05-01 | 株式会社Soken | 軸ずれ推定装置 |
| WO2022270103A1 (ja) * | 2021-06-23 | 2022-12-29 | 株式会社デンソー | 光軸調整方法、レーザレーダ装置および光軸調整システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050219506A1 (en) | 2005-10-06 |
| DE102005014721A1 (de) | 2005-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4428208B2 (ja) | 車両用物体認識装置 | |
| JP2005291788A (ja) | 車両用物体認識装置 | |
| JP3405327B2 (ja) | 物体認識方法及び装置、記録媒体 | |
| US6018308A (en) | Obstacle recognition system for automotive vehicle | |
| US7136753B2 (en) | Object recognition apparatus for vehicle, inter-vehicle control apparatus, and distance measurement apparatus | |
| JP3736521B2 (ja) | 車両用物体認識装置 | |
| JP3331882B2 (ja) | 車両用障害物検出装置の中心軸偏向量算出装置,中心軸偏向量補正装置,および車間制御装置 | |
| JP4793094B2 (ja) | 走行環境認識装置 | |
| JP3941795B2 (ja) | 先行車両認識装置 | |
| JP3915742B2 (ja) | 車両用物体認識装置 | |
| US6484087B2 (en) | Method of selecting a preceding vehicle, a preceding vehicle selecting apparatus, and a recording medium for selecting a preceding vehicle | |
| US20040117090A1 (en) | Object recognition apparatus for vehicle, and inter-vehicle distance control unit | |
| JP3736520B2 (ja) | 車両用障害物認識装置 | |
| JP2005077379A (ja) | レーダ装置 | |
| US8810445B2 (en) | Method and apparatus for recognizing presence of objects | |
| JP2004184331A (ja) | 車両用物体認識装置 | |
| JP2004177350A (ja) | 車両用レーダ装置 | |
| JP2005043201A (ja) | 車両用レーダ装置 | |
| JP3427817B2 (ja) | 車両用障害物認識方法及び装置、記録媒体 | |
| JP3757937B2 (ja) | 距離測定装置 | |
| JP3841047B2 (ja) | 車間制御装置 | |
| JP3941791B2 (ja) | 車両用物体認識装置及びプログラム | |
| JP5556317B2 (ja) | 物体認識装置 | |
| JP2002131433A (ja) | 物体認識方法及び装置 | |
| JP3514166B2 (ja) | 先行車認識装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060523 |
|
| A871 | Explanation of circumstances concerning accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A871 Effective date: 20061010 |
|
| A975 | Report on accelerated examination |
Free format text: JAPANESE INTERMEDIATE CODE: A971005 Effective date: 20061027 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061114 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070109 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20070206 |