JP2005290691A - ウインドウガラスの挟持有無検出装置 - Google Patents
ウインドウガラスの挟持有無検出装置 Download PDFInfo
- Publication number
- JP2005290691A JP2005290691A JP2004103538A JP2004103538A JP2005290691A JP 2005290691 A JP2005290691 A JP 2005290691A JP 2004103538 A JP2004103538 A JP 2004103538A JP 2004103538 A JP2004103538 A JP 2004103538A JP 2005290691 A JP2005290691 A JP 2005290691A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- driving
- current value
- window glass
- state
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 239000005357 flat glass Substances 0.000 title claims abstract description 138
- 238000001514 detection method Methods 0.000 title claims abstract description 91
- 230000001052 transient effect Effects 0.000 claims abstract description 87
- 230000008859 change Effects 0.000 claims description 30
- 238000005070 sampling Methods 0.000 claims description 12
- 238000000034 method Methods 0.000 description 24
- 230000008569 process Effects 0.000 description 23
- 230000001174 ascending effect Effects 0.000 description 8
- 230000007423 decrease Effects 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 230000000694 effects Effects 0.000 description 5
- 238000012545 processing Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000006073 displacement reaction Methods 0.000 description 1
- 230000005281 excited state Effects 0.000 description 1
- 238000002474 experimental method Methods 0.000 description 1
- 239000011521 glass Substances 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
Images





Landscapes
- Window Of Vehicle (AREA)
- Power-Operated Mechanisms For Wings (AREA)
Abstract
【解決手段】 作動制御部12は、正逆回転することによりウインドウガラスの開閉動作を行うモータ14の駆動状態を検出する。そして、作動制御部12は、モータ14の駆動開始直後から該モータの駆動が安定するまでの過渡駆動期間に、モータ14の駆動状態を検出し、該モータ14の駆動状態が時間経過とともに安定駆動状態に収束しない場合に、ウインドウガラスが異物を挟み込んでいると判定する。
【選択図】 図1
Description
前記モータの駆動開始直後から該モータが安定駆動状態となるまでの過渡駆動期間に、前記駆動状態検出手段によって検出された該モータの駆動状態をモニタし、該モータの駆動状態が時間経過とともに安定駆動状態に収束しない場合に、ウインドウガラスが異物を挟み込んでいると判定する挟持有無判定手段とを備えたことを要旨とする。
請求項1に記載の発明によると、挟持有無判定手段は、モータの駆動開始直後から該モータの駆動が安定するまでの過渡駆動期間におけるモータの駆動状態の変化傾向をモニタし、該モータの駆動状態が時間経過とともに安定駆動状態に収束しない場合に、ウインドウガラスが異物を挟み込んでいると判断する。このため、駆動直後といったモータの不安定な駆動状態においても、迅速且つ確実にウインドウガラスの挟持有無判定が可能となる。よって、当該ウインドウガラスの挟持有無検出装置では、モータの駆動開始直後にウインドウガラスに異物が挟み込まれた場合や、異物を挟み込んだ状態でモータが駆動された場合であっても、その旨を迅速且つ確実に判定可能となる。
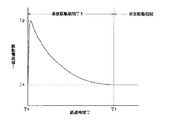
以下、本発明を車両のウインドウガラスを昇降するウインドウ駆動制御装置として具体化した第1実施形態を図1〜図4に基づき詳細に説明する。なお、以下に列挙する各実施形態は、それぞれモータの駆動開始直後の過渡的に生じる不安定な駆動状態(過渡駆動状態)にあっても挟持有無検出を行うことができるようにしたことに主たる特徴を有している。そして、本実施形態においては、モータの駆動開始直後の駆動電流値が、モータの安定した駆動状態(安定駆動状態)での駆動電流値に収束していくか否かに基づいて挟持有無判定を行うことに主たる特徴を有している。
作動制御部12は、通常、両出力端子OUT1,OUT2からLレベルの信号を出力した状態となっている。そして、操作スイッチ15から前記操作信号が入力されると、作動制御部12は、ウインドウ駆動制御を行う。詳しくは、操作スイッチ15からオート上昇操作信号または手動上昇操作信号が入力されると、作動制御部12は、第1出力端子OUT1からHレベルの信号を出力して第1スイッチング素子TR1を作動させる。これにより、第1リレー16がON状態となり、モータ14が正回転駆動してウインドウガラスが上昇される。
ウインドウガラスの閉動作時には、作動制御部12は、図2に示すフローチャートに従って挟持有無検出制御のための処理を行う。そこで、作動制御部12によって行われる挟持有無検出処理を、該フローチャート及び図4に示すグラフを用いて説明する。なお、この処理を行うためのプログラムは作動制御部12を構成するROM等に記録されており、該処理は、ウインドウガラスの閉動作時に繰り返し行われる。
(1)作動制御部12は、モータ14の駆動開始直後から該モータ14の駆動が安定するまでの過渡駆動期間におけるモータ14の駆動状態の変化傾向をモニタし、該モータ14の駆動状態が時間経過とともに安定駆動状態に収束しない場合に、ウインドウガラスが異物を挟み込んでいると判断する。このため、こうした作動制御部12を備えたウインドウ駆動制御装置11によれば、駆動直後といったモータ14の不安定な駆動状態においても、迅速且つ確実にウインドウガラスの挟持有無判定を行うことができる。つまり、該ウインドウ駆動制御装置11によれば、モータ14の駆動開始直後にウインドウガラスに異物が挟み込まれた場合や、異物を挟み込んだ状態でモータ14が駆動された場合であっても、過渡駆動期間内に挟持有無判定を行うことができる。
・ 作動制御部12は、検出時点Tnでのモータ14の駆動電流値Inから、その直前の検出時点T(n−1)でのモータ14の駆動電流値I(n−1)を減算することに限定されない。例えば、作動制御部12は、該駆動電流値Inから、その直前よりも前の検出時点(例えば検出時点T(n−2)や検出時点T(n−3)など)での駆動電流値Iを減算するようになっていてもよい。
次に、本発明を具体化した第2実施形態を図5及び図6に基づいて説明する。なお、以下の各実施形態では、第1実施形態と相違する点を主に述べ、共通する点については同一部材番号を付すのみとしてその説明を省略する。
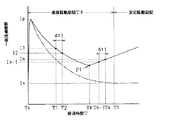
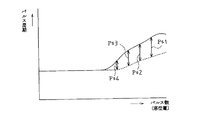
そして、ステップS21において作動制御部12は、検出時点Tnでの駆動電流値Inと、同検出時点Tnでの基準電流値Ibnとの差分値ΔInを算出する。具体的には、例えば図6に示すように、作動制御部12は、検出時点T1の場合には、その時点での駆動電流値I1と基準電流値Ib1との差分値ΔI1を算出する。また、作動制御部12は、検出時点T2の場合にはその時点での駆動電流値I2と基準電流値Ib2との差分値ΔI2を算出し、同様に、検出時点T3の場合には差分値ΔI3、検出時点T4の場合には差分値ΔI4を算出する。
(7)作動制御部12は、モータ14の過渡駆動期間においてそれぞれ対応する検出時点Tnでの実際の駆動電流値Inと、メモリ12aに記録された基準電流値Ibnとの差分値ΔInを算出する。そして、作動制御部12は、該差分値ΔInと、その直前までの3回分の差分値ΔI(n−3)〜ΔI(n−1)との差分和ΔItを算出し、該差分和ΔItが所定の閾値Ihを超えた場合に、ウインドウガラスが異物を挟み込んでいると判定する。すなわち、作動制御部12は、過渡駆動期間内でのある時点におけるモータ14の実際の電流値が、無挟持状態でのモータ14の駆動電流値Iと乖離しているか否かに基づいてウインドウガラスの挟持有無判定を行う。よって、作動制御部12は、モータ14の駆動開始直後から該モータ14の駆動が安定するまでの過渡駆動期間において、ウインドウガラスの挟持有無判定を迅速且つ確実に行うことができる。
・ 前記実施形態において作動制御部12は、合計4回分の差分値ΔI(n−3)〜ΔInの差分和ΔItを算出し、該差分和ΔItと閾値Ihとの比較に基づいて、挟持有無判定を行うようになっている。しかし、作動制御部12は、例えば合計3回分の差分値ΔI(n−2)〜ΔInの差分和ΔItと閾値Ihとの比較に基づいて、挟持有無判定を行うようになっていてもよい。また、作動制御部12は、合計2回分の差分値ΔI(n−1),ΔInとの差分和ΔItと閾値Ihとの比較に基づいて、挟持有無判定を行うようになっていてもよい。さらに、作動制御部12は、合計5回分以上の差分値の差分和ΔItと閾値Ihとの比較に基づいて、挟持有無判定を行うようになっていてもよい。
・ 前記実施形態においてメモリ12aには、各検出時点Tnにおける基準電流値Ibnが記録されている。すなわち、前記実施形態においてメモリ12aには、無挟持状態での過渡動作期間における各検出時点でのモータ14の駆動電流値Iが、基準電流値Ibnとして直接的に記録された状態となっている。しかし、無挟持状態における過渡駆動期間でのモータ14の駆動電流値Iの変化傾向を関数としてメモリ12aに記録し、作動制御部12は、該関数に基づいて各検出時点Tnにおける基準電流値Ibnを算出するようになっていてもよい。この場合、前記関数がメモリ12aに記録されることにより、メモリ12aには、無挟持状態での過渡動作期間における各検出時点でのモータ14の駆動電流値Iが、基準電流値Ibnとして間接的に記録された状態となっていることに相当する。
次に、本発明を具体化した第3実施形態を図7及び図8に基づいて説明する。
本実施形態における前記各実施形態との相違点は、前記作動制御部12によって行われる前記モータ14の過渡駆動状態での挟持有無判定処理についてのみであり、その他の制御やウインドウ駆動制御装置11のハードウェア構成については前記各実施形態と同構成である。具体的には、本実施形態においては、無挟持状態における安定駆動状態での駆動電流値(定常電流値)と、実際に検出された過渡駆動状態での駆動電流値とを比較することにより駆動有無判定を行うことに主たる特徴を有している。
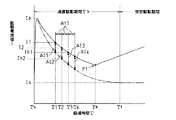
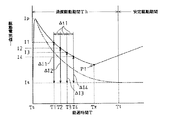
そして、ステップS31において作動制御部12は、検出時点Tnでの駆動電流値Inと、メモリ12aに記録されている定常電流値Isとの差分値ΔInを算出する。具体的には、例えば図6に示すように、作動制御部12は、検出時点T1の場合には、その時点での駆動電流値I1と定常電流値Isとの差分値ΔI1を算出する。また、作動制御部12は、検出時点T2の場合にはその時点での駆動電流値I2と定常電流値Isとの差分値ΔI2を算出し、同様に、検出時点T3の場合には差分値ΔI3、検出時点T4の場合には差分値ΔI4を算出する。
(10)メモリ12aには、無挟持状態での安定駆動状態におけるモータ14の定常電流値Isが基準駆動状態として記録されている。そして、作動制御部12は、過渡駆動期間内に検出されたモータ14の実際の駆動電流値Inと定常電流値Isとの差分値、及び、実際の駆動電流値Inが検出された時点Tnに基づいて、ウインドウガラスの挟持有無判定を行う。よって、作動制御部12は、モータ14の過渡駆動期間において、ウインドウガラスの挟持有無判定を迅速且つ確実に行うことができる。
・ 前記第3実施形態において作動制御部12は、前記過渡駆動期間中に検出したモータ14の駆動電流値Inと定常電流値Isとの差分値ΔInが、閾値Ihnよりも大きいと、3回連続で判断した場合に、ウインドウガラスに異物が挟み込まれていると判定するようになっている。しかし、作動制御部12は、該差分値ΔInが閾値Ihnよりも大きいと1回のみ判断した場合や、2回連続で判断した場合や、4回以上連続で判断した場合などに、ウインドウガラスに異物が挟み込まれていると判定するようになっていてもよい。つまり、作動制御部12は、該差分値ΔInが閾値Ihnよりも大きいと判断したことを条件として、ウインドウガラスに異物が挟み込まれていると判定するようになっていればよい。
次に、特許請求の範囲に記載された技術的思想のほかに、前述した実施形態によって把握される技術的思想を以下に列挙する。
Claims (6)
- 正逆回転することによりウインドウガラスの開閉動作を行うモータの駆動状態を検出する駆動状態検出手段と、
前記モータの駆動開始直後から該モータが安定駆動状態となるまでの過渡駆動期間に、前記駆動状態検出手段によって検出された該モータの駆動状態をモニタし、該モータの駆動状態が時間経過とともに安定駆動状態に収束しない場合に、ウインドウガラスが異物を挟み込んでいると判定する挟持有無判定手段とを備えたことを特徴とするウインドウガラスの挟持有無検出装置。 - 前記駆動状態検出手段は、所定のサンプリング時間毎に前記モータの駆動電流値を検出し、
前記挟持有無判定手段は、前記過渡駆動期間に前記駆動状態検出手段によって検出されたモータの駆動電流値が増加した場合に、ウインドウガラスが異物を挟み込んでいると判定することを特徴とする請求項1に記載のウインドウガラスの挟持有無検出装置。 - 正逆回転することによりウインドウガラスの開閉動作を行うモータの駆動状態を検出する駆動状態検出手段と、
ウインドウガラスに異物が挟まれていない無挟持状態での該モータの駆動状態を示す基準駆動状態が記録される記録手段と、
前記モータの駆動開始直後から該モータの駆動が安定するまでの過渡駆動期間に、前記駆動状態検出手段によって検出された該モータの実際の駆動状態をモニタし、該モータの実際の駆動状態が前記基準駆動状態と異なる場合にウインドウガラスが異物を挟み込んでいると判定する挟持有無判定手段とを備えたことを特徴とするウインドウガラスの挟持有無検出装置。 - 前記駆動状態検出手段は、前記モータの駆動電流値を検出し、
前記記録手段には、前記過渡駆動期間または前記モータが安定して駆動する安定駆動期間における無挟持状態での前記モータの駆動電流値に基づいて設定された前記基準駆動状態が記録され、
前記挟持有無判定手段は、前記過渡駆動期間に前記駆動状態検出手段によって検出されたモータの実際の駆動電流値の変化傾向が前記基準駆動状態の変化傾向と異なる場合に、ウインドウガラスが異物を挟み込んでいると判定することを特徴とする請求項3に記載のウインドウガラスの挟持有無検出装置。 - 前記駆動状態検出手段は、所定のサンプリング時間毎に前記モータの駆動電流値を検出し、
前記記録手段には、無挟持状態での前記過渡駆動期間における前記サンプリング時間毎の前記モータの駆動電流値が前記基準駆動状態として記録され、
前記挟持有無判定手段は、前記過渡駆動期間において前記駆動状態検出手段によって検出された前記モータの実際の駆動電流値と、前記記録手段に記録された駆動電流値のうち該実際の駆動電流値が検出された時点と対応する駆動電流値との差分値を算出し、該差分値が所定の閾値を超えた際にウインドウガラスが異物を挟み込んでいると判定することを特徴とする請求項4に記載のウインドウガラスの挟持有無検出装置。 - 前記挟持有無判定手段は、前記モータの駆動状態が前記過渡駆動期間から安定して駆動する安定駆動期間に移行した後には、前記過渡駆動期間と異なる挟持有無判定を行うことを特徴とする請求項1〜5のいずれか1項に記載のウインドウガラスの挟持有無検出装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004103538A JP4295654B2 (ja) | 2004-03-31 | 2004-03-31 | ウインドウガラスの挟持有無検出装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004103538A JP4295654B2 (ja) | 2004-03-31 | 2004-03-31 | ウインドウガラスの挟持有無検出装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005290691A true JP2005290691A (ja) | 2005-10-20 |
| JP4295654B2 JP4295654B2 (ja) | 2009-07-15 |
Family
ID=35323940
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004103538A Expired - Fee Related JP4295654B2 (ja) | 2004-03-31 | 2004-03-31 | ウインドウガラスの挟持有無検出装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4295654B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007224501A (ja) * | 2006-02-21 | 2007-09-06 | Honda Motor Co Ltd | 車両用遠隔制御装置 |
| CN115071512A (zh) * | 2021-03-12 | 2022-09-20 | 尼得科智动株式会社 | 移动体控制装置 |
| US12227112B2 (en) | 2021-04-30 | 2025-02-18 | Nidec Mobility Corporation | Moving body control device |
-
2004
- 2004-03-31 JP JP2004103538A patent/JP4295654B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007224501A (ja) * | 2006-02-21 | 2007-09-06 | Honda Motor Co Ltd | 車両用遠隔制御装置 |
| CN115071512A (zh) * | 2021-03-12 | 2022-09-20 | 尼得科智动株式会社 | 移动体控制装置 |
| US12227112B2 (en) | 2021-04-30 | 2025-02-18 | Nidec Mobility Corporation | Moving body control device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4295654B2 (ja) | 2009-07-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7701157B2 (en) | Motor controller and method for controlling motor | |
| JP6066342B2 (ja) | 窓開閉制御システム及び窓開閉制御装置 | |
| JP2005287284A5 (ja) | ||
| JP5920193B2 (ja) | リレー駆動回路 | |
| JP4510409B2 (ja) | ウインドウガラスの挟持有無検出装置 | |
| JP4295654B2 (ja) | ウインドウガラスの挟持有無検出装置 | |
| JP2005110429A (ja) | パワーウインドの駆動装置 | |
| US5521473A (en) | Apparatus for driving and controlling power window while prohibiting drive of the motor during an initial period | |
| JP2003214033A (ja) | パワーウィンドウの挟み込み検出装置 | |
| JP4448621B2 (ja) | ウインドウガラスの挟持有無検出装置 | |
| JPH07224576A (ja) | パワーウインドウ駆動制御装置 | |
| JP5286835B2 (ja) | モータ制御回路及びモータのロック異常検出方法 | |
| JP4105620B2 (ja) | ウインドウガラスの挟み込み検出装置 | |
| JPH03273894A (ja) | 直流モータ駆動回路の制御装置 | |
| JPH1023787A (ja) | モータのリプル電流検出回路 | |
| JP5470889B2 (ja) | モータの制御装置 | |
| JP2000087645A (ja) | パワーウインド装置 | |
| JPH11241561A (ja) | 開閉部材の異物挟み込み検出装置 | |
| JP6066336B2 (ja) | 窓開閉制御システム及び窓開閉制御装置 | |
| JP2005323475A (ja) | モーター制御装置 | |
| JP2002168049A (ja) | ウインドウガラスの挟み込み有無検出装置 | |
| JPH0633665A (ja) | パワーウインドウ駆動制御装置 | |
| JP2969248B2 (ja) | 車両用窓ガラス開閉装置 | |
| JP3860282B2 (ja) | ウィンドガラスの挟持有無検出装置 | |
| JPH09224388A (ja) | モータ駆動制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060804 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080912 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080924 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090210 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090401 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090410 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120417 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130417 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130417 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140417 Year of fee payment: 5 |
|
| LAPS | Cancellation because of no payment of annual fees |