JP2005284792A - 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 - Google Patents
画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 Download PDFInfo
- Publication number
- JP2005284792A JP2005284792A JP2004098817A JP2004098817A JP2005284792A JP 2005284792 A JP2005284792 A JP 2005284792A JP 2004098817 A JP2004098817 A JP 2004098817A JP 2004098817 A JP2004098817 A JP 2004098817A JP 2005284792 A JP2005284792 A JP 2005284792A
- Authority
- JP
- Japan
- Prior art keywords
- image
- value
- matches
- similarity
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/12—Fingerprints or palmprints
- G06V40/1365—Matching; Classification
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/751—Comparing pixel values or logical combinations thereof, or feature values having positional relevance, e.g. template matching
- G06V10/7515—Shifting the patterns to accommodate for positional errors
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/759—Region-based matching
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Multimedia (AREA)
- General Physics & Mathematics (AREA)
- Physics & Mathematics (AREA)
- Computing Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Databases & Information Systems (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Human Computer Interaction (AREA)
- Collating Specific Patterns (AREA)
- Image Analysis (AREA)
Abstract
【課題】 少ない探索量で、高い照合精度を得る。
【解決手段】 画像照合装置100は、画像Aを表わすデータおよび画像Bを表わすデータを受付ける入力部101と、画像Aの部分である中心領域が画像Bのいずれかの部分に一致する可能性が、閾値T(2)を下回るか否かを判断し、かつ中心領域が画像Bのいずれかの部分に一致する可能性を閾値T(2)以上と判断した場合、画像Aが画像Bに一致するか否かを判断する判定部1034とを含む。
【選択図】 図1
【解決手段】 画像照合装置100は、画像Aを表わすデータおよび画像Bを表わすデータを受付ける入力部101と、画像Aの部分である中心領域が画像Bのいずれかの部分に一致する可能性が、閾値T(2)を下回るか否かを判断し、かつ中心領域が画像Bのいずれかの部分に一致する可能性を閾値T(2)以上と判断した場合、画像Aが画像Bに一致するか否かを判断する判定部1034とを含む。
【選択図】 図1
Description
本発明は、画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体に関し、特に、複数の画像を照合する画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体に関する。
従来の指紋を照合する方法は、特許文献1に開示されたように、2つの画像のうち一方の画像の一部分とその一部分に最も類似する他方の画像の一部分との、配置の相関性を特定することで指紋を照合する。具体的に説明すると、特許文献1に開示された方法は、次のステップを経る。その第1ステップは、センシング画像(センサによって検出された画像)を部分領域に分割するステップである。第2ステップは、各々の部分領域の画像がテンプレート画像(予め準備された、比較用の画像)内のどの位置の部分画像と最も一致するかを探索するステップである(この探索は、すべてのセンシング画像の部分領域につき実施される)。第3ステップは、センシング画像とテンプレート画像とを重ね合わせた場合に、第2ステップで探索した部分画像同士の位置の関係を明らかにするステップである。以下の説明において、このように位置の関係を明らかにすることを「最大一致度位置探索」と称する。また、以下の説明において、センシング画像とテンプレート画像とを重ね合わせた場合に、センシング画像の部分領域とテンプレート画像の部分領域との、それぞれの中心を結ぶベクトルを「移動ベクトル」と称する。第4ステップは、最も一致するセンシング画像とテンプレート画像との間の移動ベクトルの分布に基づいて同一の指紋かどうかを結論づけるステップである。
しかし、特許文献1に開示されたように、第1ステップ〜第4ステップを経て指紋を照合する場合、処理時間や消費電力が多すぎるという問題点がある。このような問題点が生じる原因は、情報の処理量が多いという点にある。情報の処理量が多くなる原因は、まず一方の画像全体を複数の部分領域に分割し、そのすべての部分領域について、最大一致度位置探索を実施する点にある。
図8を参照して、特許文献1に開示された方法およびその問題点をより具体的に説明する。図8において、図8(A)−1、図8(A)−2、および図8(A)−64は、いずれも同一のセンシング画像(画像A)を表わす。その他の画像はいずれも同一のテンプレート画像(画像B)を表わす。画像Aは64箇所の部分領域に分割されている(1箇所の部分領域のサイズは、16画素四方である)。それぞれの部分領域には識別番号R(1)〜R(64)が付されている。図8(A)−1は、画像Aの部分領域R(1)を強調して表示した図である。図8(B)1−1〜図8(B)1−12769は、部分領域R(1)について、第2ステップの処理が実施されている状況を表わす図である。第2ステップの処理が進むにつれ、画像Aの部分領域R(1)の画像と対比される、画像(B)上の領域の位置が、1画素分ずつ変化する。部分領域R(1)と対比されるのは、画像(B)上の16画素四方の領域である。画像(B)における位置の変化幅は、縦または横のいずれかに1画素分である。最終的には、図8(B)1−12769に示すように、画像Aの部分領域R(1)の画像は、画像(B)における右下の部分領域(当該領域の左上の座標は(113,113)である)と対比される。図8(A)−2ならびに図8(B)2−1〜図8(B)2−12769は、画像AのR(2)の部分領域について第2ステップの処理が実施されている状況を表わす。図8(A)−64〜図8(B)64−12769は、画像AのR(64)の部分領域について第2ステップの処理が実施されている状況を表わす。この場合に探索される部分領域の数は、
領域数=画像Aの1箇所の部分領域に対する画像Bの部分領域の探索回数 ×画像Aの部分領域数 である。この例では、画像Aの1箇所の部分領域に対する画像Bの部分領域の探索回数は113 ×113 =12769回である。画像Aの部分領域数は64であることから、探索される部分領域の数は、 領域数(従来技術)=12769×64=817216箇所 となる。
領域数=画像Aの1箇所の部分領域に対する画像Bの部分領域の探索回数 ×画像Aの部分領域数 である。この例では、画像Aの1箇所の部分領域に対する画像Bの部分領域の探索回数は113 ×113 =12769回である。画像Aの部分領域数は64であることから、探索される部分領域の数は、 領域数(従来技術)=12769×64=817216箇所 となる。
このように、指紋を照合するために必要な探索部分領域数、即ち探索量は、極めて多い。このことは、個人認証技術(主として指紋照合をはじめとするバイオメトリクス技術を適用したもの)を民生機器(特に個人が携帯する携帯電話やPDA(Personal Digital Assistant、情報携帯端末)など)へ普及させることに対する障壁となる。その理由は、個人認証に必要な時間を少しでも短くしなければ、照合処理時に使用される電力だけで、民生機器に搭載されている電池容量以上の電力を消費し得る点にある。また、探索量が極めて多いことは、企業間の競争における優位性を損なう原因ともなる。
特開2003−323618号公報
本発明は上述の問題点を解決するためになされたものであって、その目的は、少ない探索量で、高い照合精度を得ることができる画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体を提供することにある。
上記目的を達成するために、本発明のある局面にしたがうと、画像照合装置は、第1の画像を表わすデータおよび第2の画像を表わすデータを受付けるための受付手段と、第1の画像の部分である第1の部分が第2の画像のいずれかの部分に一致する可能性が、予め定められた第1の値を下回るか否かを判断するための第1の判断手段と、第1の判断手段が、第1の部分が第2の画像のいずれかの部分に一致する可能性を第1の値以上と判断した場合、第1の画像が第2の画像に一致するか否かを判断するための第2の判断手段とを含む。
すなわち、第1の判断手段が、第1の部分が第2の画像のいずれかの部分に一致する可能性が第1の値を下回ると判断した場合、第1の画像と第2の画像とが一致する可能性は低くなる。第2の判断手段は、第1の部分が第2の画像のいずれかの部分に一致する可能性が第1の値以上の場合に、第1の画像が第2の画像に一致するか否かを判断する。これにより、少ない探索量で、高い照合精度を保ちつつ、第1の画像が第2の画像に一致するか否かを判断できる。その結果、少ない探索量で、高い照合精度を得ることができる画像照合装置を提供することができる。
また、上述の画像照合装置は、第1の部分が第2の画像のいずれかの部分に一致する可能性が、第1の値を上回る第2の値以上か否かを判断するための第3の判断手段をさらに含むことが望ましい。第2の判断手段は、第1の部分が第2の画像のいずれかの部分に一致する可能性が、第1の値以上で第2の値未満の場合、第1の画像が第2の画像に一致するか否かを判断するための手段を含むことが望ましい。
すなわち、第1の部分が第2の画像のいずれかの部分に一致する可能性が第2の値以上の場合、第1の画像と第2の画像とが一致する可能性は高くなる。第2の判断手段は、第1の部分が第2の画像のいずれかの部分に一致する可能性が第1の値以上で第2の値未満の場合に、第1の画像が第2の画像に一致するか否かを判断する。これにより、少ない探索量で、より高い照合精度を保ちつつ、第1の画像が第2の画像に一致するか否かを判断できる。その結果、少ない探索量で、より高い照合精度を得ることができる画像照合装置を提供することができる。
また、上述の第1の判断手段は、第1の部分の一部である部分領域に対する、第2の画像のいずれかの一部分の類似度を特定するための類似度用の特定手段と、複数の部分領域の配置と類似度が最も高い第2の画像のいずれかの一部分の配置との相関性を特定するための相関用の特定手段と、相関性が、第1の値を下回るか否かを判断するための手段とを含むことが望ましい。
また、上述の第2の判断手段は、第1の画像の一部分である部分領域に対する、第2の画像のいずれかの一部分の類似度を特定するための類似度用の特定手段と、部分領域の配置と類似度が最も高い一部分の配置との相関性を特定するための相関用の特定手段と、相関性が、予め定められた値を下回るか否かを判断するための手段とを含むことが望ましい。
また、上述の第1の画像および第2の画像は、指紋を表わす画像を含むことが望ましい。部分領域は、部分領域を横切りかつ指紋の隆線に直交する線の長さが、隆線の幅と隆線溝の幅との和の2倍以上3倍以下の長さである領域を含むことが望ましい。
また、上述の第1の画像および第2の画像は、人体それぞれに固有の模様を表わす画像を含むことが望ましい。
すなわち、第1の画像および第2の画像は、人体それぞれに固有の模様を表わす。これにより、模様の位置や特徴に応じた照合が可能になる。その結果、少ない探索量で、模様の位置や特徴に応じた照合ができ、かつ高い照合精度を得ることができる画像照合装置を提供することができる。
また、上述の人体それぞれに固有の模様は、網膜血管および脈絡膜血管のいずれかの配置が形成する模様を含むことが望ましい。
すなわち、網膜血管および脈絡膜血管のいずれかの配置が形成する模様は、時間の経過とともに変化する。これにより、第1の画像が撮影された時期と第2の画像が撮影された時期との差をある程度推定でき、かつ人体それぞれを識別できる。その結果、少ない探索量で、撮影された時期の差をある程度推定でき、かつ高い照合精度を得ることができる画像照合装置を提供することができる。
また、上述の第1の画像および第2の画像は、網膜血管および脈絡膜血管のいずれかの配置を表わす画像を含むことが望ましい。第1の部分は、視神経乳頭を含む部分であることが望ましい。
すなわち、網膜血管および脈絡膜血管のいずれかの配置が形成する模様は、時間の経過とともに変化する。一方第1の画像および第2の画像が、視神経乳頭を含む部分における網膜血管および脈絡膜血管のいずれかの配置の画像である場合、時間の経過による誤認の可能性を抑えつつ、第1の画像が撮影された時期と第2の画像が撮影された時期との差をある程度推定できる。その結果、少ない探索量で、撮影された時期の差をある程度推定でき、かつより高い照合精度を得ることができる画像照合装置を提供することができる。
また、上述の第1の画像および第2の画像は、指紋を表わす画像を含むことが望ましい。第1の部分は、指の先端よりも指の第1関節に近い部分を含むことが望ましい。
すなわち、第1の判断手段は、第1の画像のうち指の先端よりも指の第1関節に近い部分が第2の画像のいずれかの部分に一致する可能性が、第1の値を下回るか否かを判断する。指の先端よりも指の第1関節に近い部分の指紋は、個人差が特に大きい部分である。これにより、第1の判断手段の判断の精度はより高くなる。その結果、少ない探索量で、より高い照合精度を得ることができる画像照合装置を提供することができる。
また、上述の指の先端よりも第1関節に近い部分は、指紋が描く弧の中心を含むことが望ましい。
すなわち、第1の判断手段は、第1の画像のうち指紋が描く弧の中心を含む部分が第2の画像のいずれかの部分に一致する可能性が、第1の値を下回るか否かを判断する。指紋が描く弧の中心を含む部分の指紋は、個人差が著しく大きい部分である。これにより、第1の判断手段の判断の精度は著しく高くなる。その結果、少ない探索量で、著しく高い照合精度を得ることができる画像照合装置を提供することができる。
また、上述の第1の画像および第2の画像は、指紋を表わす画像を含むことが望ましい。第1の部分の面積は、指の投影面積の25パーセントから40パーセントまでの面積であることが望ましい。
すなわち、第1の判断手段は、第1の部分の面積が指の投影面積の25パーセントから40パーセントまでの面積である場合に、第1の部分が第2の画像のいずれかの部分に一致する可能性が、第1の値を下回るか否かを判断する。これにより、第1の判断手段の判断の精度はより高くなる。その結果、少ない探索量で、より高い照合精度を得ることができる画像照合装置を提供することができる。
また、上述の第1の画像および第2の画像は、印影を表わす画像を含むことが望ましい。
すなわち、第1の判断手段は、印影を表わす画像の第1の部分が第2の画像のいずれかの部分に一致する可能性が、第1の値を下回るか否かを判断する。印影は、不一致であることを容易に判断できる。これにより、探索量がより少なくても、第1の判断手段の判断の精度は高くなる。その結果、より少ない探索量で、高い照合精度を得ることができる画像照合装置を提供することができる。
本発明の他の局面にしたがうと、画像照合方法は、第1の画像を表わすデータおよび第2の画像を表わすデータを受付ける受付ステップと、第1の画像の部分である第1の部分が第2の画像のいずれかの部分に一致する可能性が、予め定められた第1の値を下回るか否かを判断する第1の判断ステップと、第1の判断ステップにおいて、第1の部分が第2の画像のいずれかの部分に一致する可能性を第1の値以上と判断した場合、第1の画像が第2の画像に一致するか否かを判断する第2の判断ステップとを含む。
すなわち、少ない探索量で、高い照合精度を得ることができる画像照合方法を提供することができる。
本発明の他の局面にしたがうと、画像照合プログラムは、第1の画像を表わすデータおよび第2の画像を表わすデータを受付ける受付ステップと、第1の画像の部分である第1の部分が第2の画像のいずれかの部分に一致する可能性が、予め定められた第1の値を下回るか否かを判断する第1の判断ステップと、第1の判断ステップにおいて、第1の部分が第2の画像のいずれかの部分に一致する可能性を第1の値以上と判断した場合、第1の画像が第2の画像に一致するか否かを判断する第2の判断ステップとを含む各ステップをコンピュータに実行させる。
すなわち、少ない探索量で、高い照合精度を得ることができる画像照合プログラムを提供することができる。
本発明の他の局面にしたがうと、記録媒体は、画像照合プログラムを記録した、コンピュータ読取り可能な記録媒体である。記録媒体は、第1の画像を表わすデータおよび第2の画像を表わすデータを受付ける受付ステップと、第1の画像の部分である第1の部分が第2の画像のいずれかの部分に一致する可能性が、予め定められた第1の値を下回るか否かを判断する第1の判断ステップと、第1の判断ステップにおいて、第1の部分が第2の画像のいずれかの部分に一致する可能性を第1の値以上と判断した場合、第1の画像が第2の画像に一致するか否かを判断する第2の判断ステップとを含む各ステップをコンピュータに実行させるための画像照合プログラムを記録したコンピュータ読取り可能な記録媒体である。
すなわち、少ない探索量で、高い照合精度を得ることができる画像照合プログラムを記録したコンピュータ読取り可能な記録媒体を提供することができる。
本発明に係る画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体は、少ない探索量で、高い照合精度を得ることができる。
以下、図面を参照しつつ、本発明の実施の形態について説明する。以下の説明では、同一の部品には同一の符号を付してある。それらの名称および機能も同じである。したがって、それらについての詳細な説明は繰返さない。
図1を参照して、本実施の形態に係る画像照合装置100は、入力部101と、記憶部102(後述するメモリ624や固定ディスク626に対応する)と、処理部103と、出力部104(後述するディスプレイ610やプリンタ690に対応する)と、バス105とを含む。入力部101は指紋センサを含む。入力部101は、その指紋センサにより、画像Aを表わすデータおよび画像Bを表わすデータを受付ける。なお、画像Aおよび画像Bは、いずれも指紋の画像である。入力部101は、読込んだ指紋の画像の画像データを、記憶部102や処理部103に出力する装置でもある。指紋センサは、光学式、圧力式および静電容量方式のいずれかであって、ユーザが指定したタイプのものである。本実施の形態の場合、光学式の指紋センサが含まれていることとする。記憶部102は、画像データや各種の計算結果などを格納する。処理部103は、入力部101および記憶部102を制御する。また処理部103は、指紋を照合するために必要な情報の処理(演算を含む)を実施する回路でもある。出力部104は、記憶部102が記憶した情報や処理部103が作成した情報を出力する。バス105は、入力部101、記憶部102、および処理部103の間の制御信号やデータ信号を転送する。
記憶部102は、参照ブロック1021と、計算ブロック1022と、画像ブロック1023と、第1領域1024と、第2領域1025とを含む。参照ブロック1021は、参照に利用するために、データを一時的に記憶するブロックである。計算ブロック1022は、演算の際データを一時的に記憶するブロックである。画像ブロック1023は、センシング画像およびテンプレート画像の画像データを記憶するブロックである。第1領域1024および第2領域1025は、いずれも位置情報(本実施の形態において「位置情報」とは、部分領域の左上における頂点の座標をいう)や、移動ベクトルなどを記憶する領域である。図2を参照して、第1領域1024および第2領域1025が位置情報を記憶する、部分領域の配置を説明する。本実施の形態において、センシング画像(画像A)の全領域は、25箇所の部分領域に区分される。指紋の画像全体が、これらの部分領域に覆われている。これらの部分領域には、それぞれR(1)〜R(25)といった識別番号が付されている。図2は、これらの部分領域の画像Aにおける配置を表わす図である。第1領域1024は、部分領域R(1)〜R(9)からなる中心部の部分領域の位置情報を記憶する。第2領域1025は、部分領域R(10)〜R(25)からなる周辺部の部分領域の位置情報を記憶する。
処理部103は、補正部1031と、探索部1032と、計算部1033と、判定部1034と、制御部1035とを含む。補正部1031は、入力部101から入力された画像Aの画像データの濃淡を補正する。探索部1032は、センシング画像(画像A)の複数の部分領域につき、画像Bのうちで最も一致度の高い位置を探索する。計算部1033は、記憶部102に格納された探索部1032の結果情報を用いて、後述の移動ベクトルに基づく類似度を計算する。判定部1034は、計算部1033が算出した類似度により、指紋を照合した結果が「一致」、「不一致」、および「何れとも言えない」のいずれに該当するかを判定する。制御部1035は、処理部103の各部の処理を制御する。
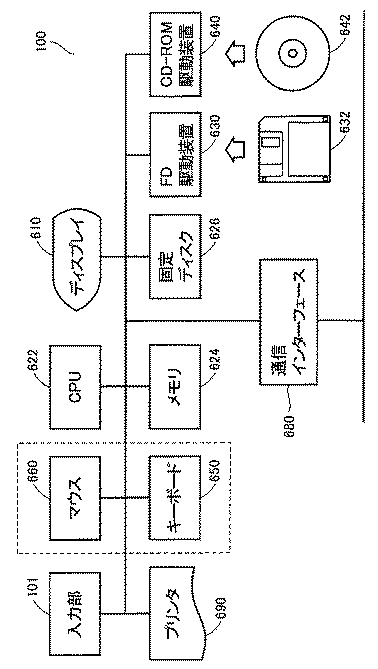
この画像照合装置100は、図3に示すコンピュータハードウェアとCPU(Central Processing Unit)622により実行されるソフトウェアとにより実現される。図3を参照して、上述のコンピュータハードウェアは、入力部101と、液晶からなるディスプレイ610と(ディスプレイ610は、CRT(Cathode-Ray Tube)からなるディスプレイであってもよい。しかし本実施の形態では、ディスプレイ610は液晶からなることとする)、コンピュータハードウェア自体を集中的に管理し、かつ制御するCPU622と、ROM(Read Only Memory)またはRAM(Random Access Memory)を含んで構成されるメモリ624と、固定ディスク626と、FD(Flexible Disk)632が着脱自在に装着されて、装着されたFD632にアクセスするFD駆動装置630と、CD−ROM642が着脱自在に装着されて、装着されたCD−ROM(Compact Disk Read Only Memory)642にアクセスするCD−ROM駆動装置640と、通信ネットワークとコンピュータハードウェアとを接続し、かつ通信するための通信インターフェィス680と、キーによる入力を受付けるキーボード650と、いわゆるクリックアンドドラッグにより入力を受付けるマウス660とを含む。これらの各部はバスを介して通信・接続される。コンピュータハードウェアには、カセット形式の磁気テープを着脱自在に装着してアクセスする磁気テープ装置が設けられてもよい。ただし本実施の形態では、そのような装置は設けられていないこととする。一般的にこうしたソフトウェアは、FD632やCD−ROM642などの記録媒体に格納されて流通し、FD駆動装置630やCD−ROM駆動装置640などにより記録媒体から読取られて固定ディスク626に一旦格納される。さらにメモリ624に読出されて、上述したCPU622により実行される。上述したコンピュータのハードウェア自体は一般的なものである。したがって、本発明の最も本質的な部分は、FD632やCD−ROM642などの記録媒体に記録されたソフトウェアである。
図4を参照して、画像照合装置100で実行されるプログラムは、指紋の照合に関して、以下のような制御構造を有する。
ステップ200(以下、ステップをSと略す)にて、制御部1035は、入力部101へ画像の入力を開始する旨の信号を送る。その後、制御部1035は、画像の入力が終了した旨の信号を受信するまで待機する。入力部101は、照合する画像Aの入力を受付け、バス105を通して記憶部102の画像ブロック1023へ出力する。画像ブロック1023は、画像Aの画像データを格納する。入力部101は、画像Aの受付が完了した後、制御部1035に画像の受付が終了した旨の信号を送る。画像の受付が終了した旨の信号が送信されると、制御部1035は、再度、入力部101へ画像の入力を開始する旨の信号を送る。その後、制御部1035は、再度、画像の入力が終了した旨の信号を受信するまで待機する。入力部101は、照合する画像Bの入力を受付け、バス105を通して記憶部102の画像ブロック1023へ出力する。画像ブロック1023は、画像Bの画像データを格納する。入力部101は、画像Bの受付が完了した後、制御部1035に画像の受付が終了した旨の信号を送る。
S202にて、制御部1035は、補正部1031に画像の補正を開始する旨の信号を送る。その後、制御部1035は、画像の補正が終了した旨の信号を受信するまで待機する。多くの場合、入力部101が受付けた画像は、各画素の濃淡値や全体の濃度分布に、入力部101の特性や、指紋自体の乾燥度合いや、指を押し付ける圧力の影響を受けている。これにより、入力部101が受付けた画像の画質は一様ではない。画質が一様ではないので、受付けた画像データをそのまま照合に用いることは適当でない。補正部1031は、画像が入力された時の条件の変動を抑制するように、入力された画像の画質を補正する。具体的には、入力された画像の、全体もしくは部分領域に、ヒストグラムの平坦化処理や画像の二値化処理などを施す。補正部1031は、画像Aおよび画像Bの双方に、これらの処理を施す。画像Aと画像Bとに対するこれらの処理の終了後、補正部1031は、制御部1035に画像の補正が終了した旨の信号を送る。なお、ヒストグラムの平坦化とは、次のステップにより実現される処理である。その第1のステップは、画像の各画素を、濃度を表わす値(濃度値)別に分類するステップである。第2のステップは、同じ濃度値である画素数を数えるステップである。第3のステップは、濃度値が同じ画素の数が等しくなるように、各画素の濃度値を変更するステップである。どの座標にある画素の濃度値を変更するかを決定する方法には、任意の画素を抽出する方法と、隣接する画素の濃度値を参照する方法とがある。本実施の形態では、任意の画素を抽出する方法でどの座標にある画素の濃度値を変更するかを決定する。その理由は、CPU622が実施するアルゴリズムの作成が容易であるという点にある。また、画像の二値化処理とは、画素の濃度値が後述する方法で定められた閾値以上か否かに応じて、濃度値を最大値または最小値に変更する処理をいう。閾値の定め方には、いわゆるp−タイル法、モード法、微分ヒストグラム法、判別分析法、および可変閾値法などがある。本実施の形態では、モード法により閾値を定める。モード法とは、次のステップにより閾値を定める方法である。その第1のステップは、濃度値別の画素数をヒストグラム化するステップである。第2のステップは、濃度値別の画素数の推移が減少から増加に転じる濃度値、すなわちヒストグラムの谷を検出し、閾値とするステップである。
S204にて、画像Aおよび画像Bに対し、類似度の計算および照合の判定の処理が実施される。この処理は、後述するS210〜S226の処理に該当する。
S206にて、制御部1035は、参照ブロック1021に記憶された照合の結果を表わす情報を、出力部104に出力する。出力部104は、制御部1035が出力した情報を出力する。
図5を参照して、画像照合装置100で実行されるプログラムは、類似度の計算および照合の判定に関して、以下のような制御構造を有する。
S210にて、制御部1035は、判定部1034に照合の判定を開始する旨の信号を送る。信号が送信されると、制御部1035は、照合の判定が終了した旨の信号を受信するまで待機する。判定部1034は、マッチング(類似度の計算および照合の判定)を行なう部分領域を、図2の中心領域すなわち部分領域R(1)〜R(9)に設定する。より具体的に説明すると、判定部1034は、部分画像のインデックスの最小値IMINを「1」に設定する。さらに、判定部1034は、部分画像のインデックスの最大値IMAXを「9」に設定する。このステップでマッチングを行なう部分領域を設定する場合、その領域は、指の先端よりも指の第1関節に近い部分を含む必要がある。特に、指紋が描く弧の中心を含むように設定することが重要である。その理由は、これらの部分を部分領域として設定すると、指紋が不一致か否かを容易に判断できる点にある。容易に判断できる理由は、経験則として、これらの部分に個人差が大きいと言える点にある。ちなみに、本実施の形態において、部分領域R(1)〜R(9)全体の面積は、画像Aにおける指の投影面積の約30パーセントである。このように定められている理由は、経験則上、部分領域R(1)〜R(9)全体の面積が、画像Aにおける指の投影面積の25パーセントから40パーセントまでの面積であることが望ましい点にある。
S212にて、探索部1032などは、判定部1034が設定した、マッチングを行なう部分領域について、第1テンプレートマッチングと第1類似度の計算とを実施する。この処理は、後述するS230〜S268の処理に該当する。
S214にて、判定部1034は、類似度の最大値P(A,B)が閾値T(2)未満か否かを判断する。閾値T(2)未満と判断した場合(S214にてYES)、処理はS226へと移される。もしそうでないと(S214にてNO)、処理はS216へと移される。
S216にて、判定部1034は、類似度の最大値P(A,B)が、閾値T(2)を上回る、閾値T(1)以上か否かを判断する。閾値T(1)以上と判断した場合(S216にてYES)、処理はS218へと移される。もしそうでないと(S216にてNO)、処理はS220へと移される。S218にて、判定部1034は、参照ブロック1021に「一致」である旨の情報を出力する。
S220にて、判定部1034は、マッチングを行なう部分領域を、図2の周辺の領域すなわち部分領域R(10)〜R(25)に設定する。より具体的に説明すると、判定部1034は、部分画像のインデックスの最小値IMINを「10」に設定する。さらに、判定部1034は、部分画像のインデックスの最大値IMAXを「25」に設定する。
S222にて、探索部1032などは、判定部1034が設定した、マッチングを行なう部分領域について、第2テンプレートマッチングと第2類似度の計算とを実施する。この処理は、後述するS230〜S268の処理に該当する。
S224にて、判定部1034は、類似度の最大値P(A,B)が閾値T(1)以上か否かを判断する。閾値T(1)以上と判断した場合(S224にてYES)、処理はS218へと移される。もしそうでないと(S224にてNO)、処理はS226へと移される。S226にて、判定部1034は、参照ブロック1021に「不一致」である旨の情報を出力する。
図6を参照して、画像照合装置100で実行されるプログラムは、類似度の計算に関して、以下のような制御構造を有する。
S230にて、制御部1035は、探索部1032へ、テンプレートマッチングを開始する旨の信号を送る。その後制御部1035は、テンプレートマッチングが終了した旨の信号を受信するまで待機する。探索部1032は、カウンタ変数Iの値を上述したインデックスの最小値IMINとする。
S232にて、探索部1032は、画像Aから部分領域R(I)の画像をテンプレートマッチングに用いるテンプレートとして設定する。より具体的に説明すると、探索部1032は、画像Aにおける部分領域R(I)の画像を参照ブロック1021に複写する。部分領域R(I)の形状は特に特定されない。ただし、本実施の形態の場合、部分領域R(I)は、矩形状とする。計算を簡単にできることがその理由である。しかも、本実施の形態における部分領域R(I)は、部分領域R(I)を横切りかつ隆線(指紋を描いている線)に直交する線の長さが、隆線の幅と隆線溝(隆線同士の間にある溝)の幅との和の2倍以上3倍以下の長さであるような領域である。その理由は、このように部分領域の形状を設定すると、精度よく指紋を照合できることが経験則上明らかな点にある。
S234にて、探索部1032は、S232で設定したテンプレートについて、画像B内で最も一致度の高い、つまり画像内のデータが最も一致する領域を探索する。これにより、S232で設定したテンプレートすなわち部分領域R(I)についての最大一致度CIMAXが算出される。この処理は、後述するS270〜S276の処理に該当する。
S236にて、探索部1032は、S234にて算出された部分領域R(I)についての最大一致度CIMAXを記憶部102に記憶させる。「I」の値が「1」〜「9」である場合、最大一致度CIMAXは、第1領域1024に記憶される。「I」の値がそれ以外の値である場合、最大一致度CIMAXは、第2領域1025に記憶される。
S238にて、探索部1032は、移動ベクトルV(I)を以下の式(1)にしたがって算出する。移動ベクトルV(I)が算出されると、探索部1032は、移動ベクトルV(I)を、記憶部102に記憶させる。「I」の値が「1」〜「9」である場合、移動ベクトルV(I)は、第1領域1024に記憶される。「I」の値が「1」〜「9」以外の値である場合、移動ベクトルV(I)は、第2領域1025に記憶される。式(1)から明らかなように、「移動ベクトル」とは、画像Aの左上の頂点と画像Bの左上の頂点とを重ね合わせた場合の、部分領域R(I)の位置情報から、画像B内で最も一致する領域の位置情報(後述する部分領域M(I)の左上の頂点)への、方向ベクトルを言う。一般に、移動ベクトルV(I)の大きさは「0」ではない。その理由は、画像Aと画像Bとを対比すると、指が移動したかのように画像の位置が異なる点にある。そのように画像の位置が異なる理由は、入力部101における指の置かれ方が一様でない点にある。
なお、本実施の形態において、変数RIXおよびRIYは、それぞれ画像Aにおける、部分領域R(I)の左上の頂点のX座標およびY座標である。また変数MIXおよびMIYは部分領域M(I)の左上の頂点のX座標およびY座標である。
S240にて、探索部1032は、カウンタ変数Iの値が、対象となる部分領域のインデックスの最大値IMAX(=9)未満か否かを判断する。最大値IMAX(=9)未満と判断した場合(S240にてYES)、処理はS242へと移される。もしそうでないと(S240にてNO)、処理はS244へと移される。S242にて、探索部1032は、カウンタ変数Iの値を「1」増加させる。
S244にて、探索部1032は、テンプレートマッチングが終了した旨の信号を制御部1035に送る。制御部1035は、計算部1033に、類似度の計算を開始する旨の信号を送る。信号が送られると、制御部1035は、類似度の計算が終了した旨の信号を受信するまで待機する。信号が送られると、計算部1033は、類似度の最大値P(A,B)を「0」に初期化する。本実施の形態において、類似度の最大値P(A,B)とは、画像Aと画像Bとの類似度の最大値を格納する変数である。
S246にて、計算部1033は、カウンタ変数Iの値を「1」に初期化する。S248にて、計算部1033は、基準となる移動ベクトルV(I)に関する類似度P(I)を「0」に初期化する。S250にて、計算部1033は、カウンタ変数Jの値を「1」に初期化する。S252にて、計算部1033は、基準となる移動ベクトルV(I)と比較しようとする移動ベクトルV(J)とのベクトル差dVIJを、以下の式(2)にしたがって計算する。
変数VIXは、移動ベクトルV(I)のX方向の成分を表わす。変数VIYは、移動ベクトルV(I)のY方向の成分を表わす。変数VJXは、移動ベクトルV(J)のX方向の成分を表わす。変数VJYは、移動ベクトルV(J)のY方向の成分を表わす。関数SQRT(F)は、値Fの平方根を表わす。
S254にて、計算部1033は、移動ベクトルV(I)と移動ベクトルV(J)とが実質的に同一か否かを判断する。具体的には、計算部1033は、ベクトル差dVIJが、定数εより小さいか否かを判断する。実質的に同一と判断した場合(S254にてYES)、処理はS256へと移される。もしそうでないと(S254にてNO)、処理はS258へと移される。S256にて、計算部1033は、類似度P(I)の値を、以下の式(3)にしたがって増加させる。
変数αは、類似度P(I)を増加させる値である。本実施の形態において、変数αの値は、ベクトル差dVIJの大きさに対応するように、設計時に任意に設定できる。たとえばα=1とした場合、類似度P(I)の値は、基準とした移動ベクトルV(I)と同一の移動ベクトルを持つ部分領域の個数を表わすこととなる。α=CIMAXとした場合、類似度P(I)は、最大一致度CIMAXの総和を表わすこととなる。
S258にて、計算部1033は、カウンタ変数Jが部分領域のインデックスの最大値IMAX(=9)未満か否かを判断する。最大値IMAX(=9)未満と判断した場合(S258にてYES)、処理はS260へと移される。もしそうでないと(S258にてNO)、処理はS262へと移される。S260にて、計算部1033は、カウンタ変数Jの値を「1」増加させる。
S262にて、計算部1033は、移動ベクトルV(I)を基準とした場合の類似度P(I)が、類似度の最大値P(A,B)より大きいか否かを判断する。類似度P(I)が、類似度の最大値P(A,B)より大きいと判断した場合(S262にてYES)、処理はS264へと移される。もしそうでないと(S262にてNO)、処理はS266へと移される。S264にて、計算部1033は、類似度の最大値P(A,B)に移動ベクトルV(I)を基準とした場合の類似度P(I)の値を代入する。
S266にて、計算部1033は、基準とする移動ベクトルV(I)のカウンタ変数Iの値が、部分領域のインデックスの最大値IMAX(=9)より小さいか否かを判断する。カウンタ変数Iの値が、インデックスの最大値IMAXより小さいと判断した場合(S266にてYES)、処理はS268へと移される。もしそうでないと(S266にてNO)、処理は終了する。S268にて、計算部1033は、カウンタ変数Iの値を「1」増加させる。
図7を参照して、画像照合装置100で実行されるプログラムは、領域M(I)の探索すなわち一致度の算出に関して、以下のような制御構造を有する。
S270にて、探索部1032は、一致度C(I,S,T)を以下の式(4)にしたがい計算する(一致度を算出する式は、必ずしも式(4)に限定されない。ただし、本実施の形態の場合、一致度は式(4)により計算することとする)。一致度C(I,S,T)が計算されると、探索部1032は、一致度C(I,S,T)の値を、カウンタ変数I、および画像Bの座標(S,T)に対応付けた上で、参照ブロック1021に格納する。ただし、R(I,X,Y)は、部分領域R(I)上の座標(X,Y)における画素の濃度値を表わす。B(S,T)は、画像Bの座標(S,T)における画素の濃度値を表わす。座標(S,T)が画像Bの座標の最大値を超えた場合、B(S,T)の値は「0」となる。Wは部分領域R(I)の幅を表わす。Hは部分領域R(I)の高さを表わす。V(0)は、画像Aおよび画像Bの、各画素が取りうる最大の濃度値を表わす。C(I,S,T)は、座標(S,T)を基準とし、かつ幅がWで高さがHの領域と、部分領域R(I)とが、一致する度合いを表わす値である。なお、本実施の形態において、部分領域R(I)および画像Bの座標は、いずれも左上の頂点を基準とする。
S272にて、探索部1032は、画像Bの座標に、一致度C(I,S,T)が未だ算出されていない座標があるか否かを判断する。一致度C(I,S,T)が未だ算出されていない座標があると判断した場合(S272にてYES)、処理はS274へと移される。もしそうでないと(S272にてNO)、処理はS276へと移される。
S274にて、探索部1032は、画像Bの座標(S,T)を、S272にて一致度C(I,S,T)が算出された座標の隣の座標に更新する。本実施の形態の場合、隣の座標が無ければ、探索部1032は、画像Bの座標(S,T)を、S272にて一致度C(I,S,T)が算出された座標の真下の座標に更新する。なお、本実施の形態の場合、座標(S,T)の初期値は(0,0)すなわち画像Bの左上を表わす座標である。
S276にて、探索部1032は、参照ブロック1021に格納された一致度C(I,S,T)の中から最大値を探し出す。一致度C(I,S,T)の最大値CIMAXが探し出されると、探索部1032は、画像のBの座標(S,T)のうち、最大値CIMAXが算出された座標を基準とし、かつ幅がWで高さがHの領域が、部分領域R(I)と最も一致度が高い領域とみなす。なお、このようにして部分領域R(I)と最も一致度が高いとみなされた領域を部分領域M(I)と称する。また、本実施の形態において、部分領域M(I)の左上の頂点の座標を(MIX,MIY)とする。
以上のような構造およびフローチャートに基づく、画像照合装置100の動作について説明する。
[指紋の中心部分の照合だけで不一致と判断できる場合]
制御部1035は、入力部101へ画像の入力を開始する旨の信号を送る。入力部101は、照合する画像Aの入力を受付け、バス105を通して記憶部102の画像ブロック1023へ出力する。画像ブロック1023は、画像Aの画像データを格納する。入力部101は、照合する画像Bの入力を受付け、バス105を通して記憶部102の画像ブロック1023へ出力する。画像ブロック1023は、画像Bの画像データを格納する(S200)。
制御部1035は、入力部101へ画像の入力を開始する旨の信号を送る。入力部101は、照合する画像Aの入力を受付け、バス105を通して記憶部102の画像ブロック1023へ出力する。画像ブロック1023は、画像Aの画像データを格納する。入力部101は、照合する画像Bの入力を受付け、バス105を通して記憶部102の画像ブロック1023へ出力する。画像ブロック1023は、画像Bの画像データを格納する(S200)。
画像Bの画像データが格納されると、制御部1035は、補正部1031に画像の補正を開始する旨の信号を送る。補正部1031は、画像が入力された時の条件の変動を抑制するように、入力された画像の画質を補正する(S202)。
画質が補正されると、制御部1035は、判定部1034に照合の判定を開始する旨の信号を送る。判定部1034は、マッチングを行なう部分領域を、部分領域R(1)〜R(9)に設定する(S210)。
部分領域が設定されると、制御部1035は、探索部1032へ、テンプレートマッチングを開始する旨の信号を送る。探索部1032は、カウンタ変数Iを上述したインデックスの最小値IMINとする(S230)。変数Iが設定されると、探索部1032は、画像Aから部分領域R(I)の画像をテンプレートマッチングに用いるテンプレートとして設定する(S232)。
テンプレートが設定されると、探索部1032は、そのテンプレートについて、画像B内で最も一致度の高い、つまり画像内のデータが最も一致する領域を探索する(S234)。探索部1032は、一致度C(I,S,T)を計算する。一致度C(I,S,T)が計算されると、探索部1032は、一致度C(I,S,T)の値を、カウンタ変数I、および画像Bの座標(S,T)に対応付けた上で、参照ブロック1021に格納する(S270)。値が格納されると、探索部1032は、画像Bの座標に、一致度C(I,S,T)が未だ算出されていない座標があるか否かを判断する(S272)。未だ算出されていない座標がある間(S272にてYES)、探索部1032は、画像Bの座標(S,T)を、S272にて一致度C(I,S,T)が算出された座標の隣の座標に更新し(S274)、S270〜S272の処理を繰返す。一致度C(I,S,T)が未だ算出されていない座標がなくなった後(S272にてNO)、探索部1032は、参照ブロック1021に格納された一致度C(I,S,T)の中から最大値を探し出す(S276)。最大一致度CIMAXが算出されると、探索部1032は、S234にて算出された部分領域R(I)についての最大一致度CIMAXを記憶部102に記憶させる(S236)。
最大一致度CIMAXが記憶されると、探索部1032は、移動ベクトルV(I)を算出する。移動ベクトルV(I)が算出されると、探索部1032は、移動ベクトルV(I)を、記憶部102に記憶させる(S238)。
移動ベクトルV(I)が記憶されると、探索部1032は、カウンタ変数Iの値が、対象となる部分領域のインデックスの最大値IMAX(=9)未満か否かを判断する(S240)。カウンタ変数Iの値が対象となる部分領域のインデックスの最大値IMAX(=9)以下の間(S240にてYES)、カウンタ変数Iの値が「1」ずつ増加され(S242)、かつS232〜S242の処理が繰返される。これにより、すべての部分領域R(I)についてテンプレートマッチングが実施される。すべての部分領域R(I)についてテンプレートマッチングが実施されるとともに、それぞれの部分領域R(I)の最大一致度CIMAX、および移動ベクトルV(I)が計算される。探索部1032は、順次計算される部分領域R(I)に関する最大一致度CIMAX、および移動ベクトルV(I)を記憶部102の所定の領域に格納する。これにより、画像Aの部分領域に対する、画像Bのいずれかの一部分の類似度が特定される。
最終的に、カウンタ変数Iの値が、対象となる部分領域のインデックスの最大値IMAX(=9)以上であると判断されると(S240にてNO)、計算部1033は、類似度の最大値P(A,B)を「0」に初期化する(S244)。最大値P(A,B)が初期化されると、計算部1033は、カウンタ変数Iの値を「1」に初期化する(S246)。カウンタ変数Iの値が初期化されると、計算部1033は、基準となる移動ベクトルV(I)に関する類似度P(I)を「0」に初期化する(S248)。類似度P(I)の値が初期化されると、計算部1033は、カウンタ変数Jの値を「1」に初期化する(S250)。カウンタ変数Jの値が初期化されると、計算部1033は、基準となる移動ベクトルV(I)と比較しようとする移動ベクトルV(J)とのベクトル差dVIJを計算する(S252)。ベクトル差dVIJが計算されると、計算部1033は、移動ベクトルV(I)と移動ベクトルV(J)とが実質的に同一か否かを判断する(S254)。実質的に同一と判断された場合(S254にてYES)、計算部1033は、類似度P(I)の値を増加させる(S256)。類似度P(I)の値が増加すると、計算部1033は、カウンタ変数Jが部分領域のインデックスの最大値IMAX(=9)未満か否かを判断する(S258)。カウンタ変数Jが最大値IMAX(=9)未満の間(S258にてYES)、計算部1033は、カウンタ変数Jの値を「1」増加させる(S260)。S250〜S260の処理により、基準とした移動ベクトルV(I)と同じ移動ベクトルを持つと判定される部分領域の情報から、類似度P(I)が計算され、計算部1033によって、複数の部分領域につき、それらの部分領域の配置と、類似度が最も高い画像Bのいずれかの一部分の配置との相関性が特定される。
最終的にカウンタ変数Jが最大値IMAX以上になると(S258にてNO)、計算部1033は、移動ベクトルV(I)を基準とした場合の類似度P(I)が、類似度の最大値P(A,B)より大きいか否かを判断する(S262)。類似度P(I)が、類似度の最大値P(A,B)より大きいと判断した場合(S262にてYES)、計算部1033は、類似度の最大値P(A,B)に移動ベクトルV(I)を基準とした場合の類似度P(I)の値を代入する(S264)。S262およびS264では、類似度P(I)の値が最も高くなる移動ベクトルV(I)が、基準となる移動ベクトルとして最も正当であると評価される。類似度P(I)の値が代入されると、計算部1033は、基準とする移動ベクトルV(I)のカウンタ変数Iの値が、部分領域のインデックスの最大値IMAX(=9)より小さいか否かを判断する(S266)。カウンタ変数Iの値が最大値IMAXより小さいと(S266にてYES)、計算部1033は、カウンタ変数Iの値を「1」増加させる(S268)。S244〜S268の処理を経て、計算部1033は、画像Aと画像Bにおける類似度を、変数P(A,B)の値として計算する。計算部1033は、計算した変数P(A,B)の値を記憶部102の所定アドレスに格納する。値が格納されると、計算部1033は、制御部1035へ、類似度の計算が終了した旨の信号を送る。
カウンタ変数Iの値が最大値IMAX以上になった後(S266にてNO)、判定部1034は、類似度の最大値P(A,B)が(ひいては画像Aの中心領域が画像Bのいずれかの部分に一致する可能性が)、閾値T(2)未満か否かを判断する(S214)。この場合、閾値T(2)未満と判断されるので(S214にてYES)、判定部1034は、参照ブロック1021に「不一致」である旨の情報を出力する(S226)。情報が出力されると、制御部1035は、参照ブロック1021に記憶された照合の結果を表わす情報を、出力部104に出力する。出力部104は、制御部1035が出力した情報を出力する(S206)。
[指紋の中心部分の照合だけで一致すると判断できる場合]
S200〜S268の処理を経て、判定部1034は、類似度の最大値P(A,B)が閾値T(2)未満か否かを判断する(S214)。この場合、閾値T(2)以上と判断されるので(S214にてNO)、判定部1034は、類似度の最大値P(A,B)が(ひいては画像Aの中心領域が画像Bのいずれかの部分に一致する可能性が)、閾値T(2)を上回る閾値T(1)以上か否かを判断する(S216)。この場合、閾値T(1)以上と判断されるので(S216にてYES)、判定部1034は、参照ブロック1021に「一致」である旨の情報を出力する(S218)。
S200〜S268の処理を経て、判定部1034は、類似度の最大値P(A,B)が閾値T(2)未満か否かを判断する(S214)。この場合、閾値T(2)以上と判断されるので(S214にてNO)、判定部1034は、類似度の最大値P(A,B)が(ひいては画像Aの中心領域が画像Bのいずれかの部分に一致する可能性が)、閾値T(2)を上回る閾値T(1)以上か否かを判断する(S216)。この場合、閾値T(1)以上と判断されるので(S216にてYES)、判定部1034は、参照ブロック1021に「一致」である旨の情報を出力する(S218)。
[指紋の中心部分の照合だけでは何れとも言えない場合]
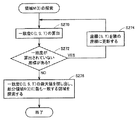
S200〜S268の処理を経て、判定部1034は、類似度の最大値P(A,B)が閾値T(2)未満か否かを判断する(S214)。この場合、判定部1034は、類似度の最大値P(A,B)が(ひいては画像Aの中心領域が画像Bのいずれかの部分に一致する可能性が)、閾値T(2)以上と判断するので(S214にてNO)、判定部1034は、自ら画像Aが画像Bに一致するか否かを判断する。このために、まず判定部1034は、類似度の最大値P(A,B)が閾値T(2)を上回る閾値T(1)以上か否かを判断する(S216)。この場合、閾値T(1)未満と判断される(すなわち、類似度の最大値P(A,B)が閾値T(2)を上回り、かつ閾値T(1)未満なので、指紋を照合した結果が「何れとも言えない」に該当する)ので(S216にてNO)、判定部1034は、マッチングを行なう部分領域を、部分領域R(10)〜R(25)に設定する(S220)。部分領域が設定されると、S230〜S268の処理を経て、判定部1034は、類似度の最大値P(A,B)が閾値T(1)以上か否かを判断する(S224)。その結果、閾値T(1)以上と判断された場合(S224にてYES)、判定部1034は、参照ブロック1021に「一致」である旨の情報を出力する(S218)。
S200〜S268の処理を経て、判定部1034は、類似度の最大値P(A,B)が閾値T(2)未満か否かを判断する(S214)。この場合、判定部1034は、類似度の最大値P(A,B)が(ひいては画像Aの中心領域が画像Bのいずれかの部分に一致する可能性が)、閾値T(2)以上と判断するので(S214にてNO)、判定部1034は、自ら画像Aが画像Bに一致するか否かを判断する。このために、まず判定部1034は、類似度の最大値P(A,B)が閾値T(2)を上回る閾値T(1)以上か否かを判断する(S216)。この場合、閾値T(1)未満と判断される(すなわち、類似度の最大値P(A,B)が閾値T(2)を上回り、かつ閾値T(1)未満なので、指紋を照合した結果が「何れとも言えない」に該当する)ので(S216にてNO)、判定部1034は、マッチングを行なう部分領域を、部分領域R(10)〜R(25)に設定する(S220)。部分領域が設定されると、S230〜S268の処理を経て、判定部1034は、類似度の最大値P(A,B)が閾値T(1)以上か否かを判断する(S224)。その結果、閾値T(1)以上と判断された場合(S224にてYES)、判定部1034は、参照ブロック1021に「一致」である旨の情報を出力する(S218)。
以上のようにして、本実施の形態に係る画像照合装置100は、まず画像の一部分を対象として照合を実施する。その時点で画像が一致しているか否かを判断できる場合、照合を終了する。このとき、探索される部分領域数は、従来技術に比べ74パーセント(100−9領域÷25領域×100=74)減少する。画像が一致しているとも一致していないとも言えない場合に限り、画像の全体を対象として照合を実施することとなる。これにより、画像の一部分のみでも照合が可能な場合、画像の残る部分の照合が実施されなくなる。しかも、照合に用いられる一部分は、その画像の特徴をよく表わす部分(指紋を表わす画像の場合、指の先端よりも第1関節に近い部分。特に指紋が描く弧の中心を含む部分)なので、一部分のみを照合に用いても、高精度の照合が可能である。その結果、少ない探索量で、特徴の有無や数、画像の鮮明度、画像を入力する際の環境の変化、およびノイズなどの影響を受けることが少なく、消費電力の低減が可能で、かつ高い照合精度を得ることができる画像照合装置を提供することができる。
なお、多くの画像を照合する場合、本実施の形態に係る画像照合装置は、S216を省略してもよい。その理由は、多くの画像を照合する場合、それらのほとんどが「不一致」である点にある。すなわち、S216の処理を実施してもしなくても、ほとんどの場合、S220の処理が実施される点にある。
また、S210〜S226の処理は、画像Aを傾けるように補正した上で、実施してもよい。この場合、画像Aの傾きと類似度の最大値P(A,B)との関係を数値化し、最も類似度の最大値P(A,B)が大きいとき、類似度の最大値P(A,B)が閾値以上か否かなどに基づいて、画像Aと画像Bとが一致するか否かを判断する。
また、画像Aおよび画像Bは、指紋の画像でなくてもよい。画像Aおよび画像Bは、人体それぞれに固有の模様(指紋のほか、網膜、虹彩、掌紋、人相など)を表わす画像であればよい。さらに、画像Aおよび画像Bは、たとえば印影などといった、模様を表わす画像であってもよい。特に画像Aおよび画像Bが網膜の網膜血管および脈絡膜血管のいずれかの配置が形成する模様の場合、これらの配置は時間が経つと次第に変化するため、一方の画像が撮影された時期と他方の画像が撮影された時期との差をある程度推定できるという効果がある。その上、画像Aおよび画像Bが、視神経乳頭を含む部分における網膜血管および脈絡膜血管のいずれかの配置の画像である場合、時間の経過による誤認の可能性を抑えつつ、上述した時期の差を推定できる。視神経乳頭付近における網膜血管および脈絡膜血管の変化が大きくなる可能性が、それほど大きくないことがその理由である。その可能性がそれほど大きくない理由は、視神経乳頭付近における網膜血管および脈絡膜血管の近傍には、他の網膜血管や脈絡膜血管があり、互いに変化することを制限しあっている点にある。他の網膜血管や脈絡膜血管がある理由は、網膜血管および脈絡膜血管がいずれも視神経乳頭付近から周囲に広がる点にある。
また、本実施の形態において、S214における判断、S216における判断、およびS224における判断は、それぞれ別の回路が実施してもよい。すなわち、必ずしも判定部1034などの回路が複数の判断を実施する必要性はない。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
100 画像照合装置、101 入力部、102 記憶部、103 処理部、104 出力部、105 バス、610 ディスプレイ、622 CPU、624 メモリ、626 固定ディスク、630 FD駆動装置、632 FD、640 CD−ROM駆動装置、642 CD−ROM、650 キーボード、660 マウス、680 通信インターフェイス、690 プリンタ、1021 参照ブロック、1022 計算ブロック、1023 画像ブロック、1024 第1領域、1025 第2領域、1031 補正部、1032 探索部、1033 計算部、1034 判定部、1035 制御部。
Claims (15)
- 第1の画像を表わすデータおよび第2の画像を表わすデータを受付けるための受付手段と、
前記第1の画像の部分である第1の部分が前記第2の画像のいずれかの部分に一致する可能性が、予め定められた第1の値を下回るか否かを判断するための第1の判断手段と、
前記第1の判断手段が、前記第1の部分が前記第2の画像のいずれかの部分に一致する可能性を前記第1の値以上と判断した場合、前記第1の画像が第2の画像に一致するか否かを判断するための第2の判断手段とを含む、画像照合装置。 - 前記画像照合装置は、前記第1の部分が前記第2の画像のいずれかの部分に一致する可能性が、前記第1の値を上回る第2の値以上か否かを判断するための第3の判断手段をさらに含み、
前記第2の判断手段は、前記第1の部分が前記第2の画像のいずれかの部分に一致する可能性が、前記第1の値以上で前記第2の値未満の場合、前記第1の画像が第2の画像に一致するか否かを判断するための手段を含む、請求項1に記載の画像照合装置。 - 前記第1の判断手段は、
前記第1の部分の一部分である部分領域に対する、前記第2の画像のいずれかの一部分の類似度を特定するための類似度用の特定手段と、
複数の前記部分領域の配置と前記類似度が最も高い第2の画像のいずれかの一部分の配置との相関性を特定するための相関用の特定手段と、
前記相関性が、前記第1の値を下回るか否かを判断するための手段とを含む、請求項1に記載の画像照合装置。 - 前記第2の判断手段は、
前記第1の画像の一部分である部分領域に対する、前記第2の画像のいずれかの一部分の類似度を特定するための類似度用の特定手段と、
前記部分領域の配置と前記類似度が最も高い一部分の配置との相関性を特定するための相関用の特定手段と、
前記相関性が、予め定められた値を下回るか否かを判断するための手段とを含む、請求項1に記載の画像照合装置。 - 前記第1の画像および第2の画像は、指紋を表わす画像を含み、
前記部分領域は、前記部分領域を横切りかつ前記指紋の隆線に直交する線の長さが、前記隆線の幅と隆線溝の幅との和の2倍以上3倍以下の長さである領域を含む、請求項4に記載の画像照合装置。 - 前記第1の画像および第2の画像は、人体それぞれに固有の模様を表わす画像を含む、請求項1に記載の画像照合装置。
- 前記人体それぞれに固有の模様は、網膜血管および脈絡膜血管のいずれかの配置が形成する模様を含む、請求項6に記載の画像照合装置。
- 前記第1の画像および第2の画像は、網膜血管および脈絡膜血管のいずれかの配置を表わす画像を含み、
前記第1の部分は、視神経乳頭を含む部分である、請求項1に記載の画像照合装置。 - 前記第1の画像および第2の画像は、指紋を表わす画像を含み、
前記第1の部分は、指の先端よりも前記指の第1関節に近い部分を含む、請求項1に記載の画像照合装置。 - 前記指の先端よりも第1関節に近い部分は、前記指紋が描く弧の中心を含む、請求項9に記載の画像照合装置。
- 前記第1の画像および第2の画像は、指紋を表わす画像を含み、
前記第1の部分の面積は、前記指の投影面積の25パーセントから40パーセントまでの面積である、請求項1に記載の画像照合装置。 - 前記第1の画像および第2の画像は、印影を表わす画像を含む、請求項1に記載の画像照合装置。
- 第1の画像を表わすデータおよび第2の画像を表わすデータを受付ける受付ステップと、
前記第1の画像の部分である第1の部分が前記第2の画像のいずれかの部分に一致する可能性が、予め定められた第1の値を下回るか否かを判断する第1の判断ステップと、
前記第1の判断ステップにおいて、前記第1の部分が前記第2の画像のいずれかの部分に一致する可能性を前記第1の値以上と判断した場合、前記第1の画像が第2の画像に一致するか否かを判断する第2の判断ステップとを含む、画像照合方法。 - 第1の画像を表わすデータおよび第2の画像を表わすデータを受付ける受付ステップと、
前記第1の画像の部分である第1の部分が前記第2の画像のいずれかの部分に一致する可能性が、予め定められた第1の値を下回るか否かを判断する第1の判断ステップと、
前記第1の判断ステップにおいて、前記第1の部分が前記第2の画像のいずれかの部分に一致する可能性を前記第1の値以上と判断した場合、前記第1の画像が第2の画像に一致するか否かを判断する第2の判断ステップとを含む各ステップをコンピュータに実行させるための画像照合プログラム。 - 第1の画像を表わすデータおよび第2の画像を表わすデータを受付ける受付ステップと、
前記第1の画像の部分である第1の部分が前記第2の画像のいずれかの部分に一致する可能性が、予め定められた第1の値を下回るか否かを判断する第1の判断ステップと、
前記第1の判断ステップにおいて、前記第1の部分が前記第2の画像のいずれかの部分に一致する可能性を前記第1の値以上と判断した場合、前記第1の画像が第2の画像に一致するか否かを判断する第2の判断ステップとを含む各ステップをコンピュータに実行させるための画像照合プログラムを記録したコンピュータ読取り可能な記録媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004098817A JP2005284792A (ja) | 2004-03-30 | 2004-03-30 | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 |
| US11/091,502 US20050220327A1 (en) | 2004-03-30 | 2005-03-29 | Image collation device, image collation method, image collation program, and computer-readable recording medium with image collation program recorded thereon |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004098817A JP2005284792A (ja) | 2004-03-30 | 2004-03-30 | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005284792A true JP2005284792A (ja) | 2005-10-13 |
Family
ID=35054317
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004098817A Pending JP2005284792A (ja) | 2004-03-30 | 2004-03-30 | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20050220327A1 (ja) |
| JP (1) | JP2005284792A (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010050541A (ja) * | 2008-08-19 | 2010-03-04 | Fuji Xerox Co Ltd | 画像処理装置及び画像処理プログラム |
| JP2012238059A (ja) * | 2011-05-10 | 2012-12-06 | Azbil Corp | 照合装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007094689A (ja) * | 2005-09-28 | 2007-04-12 | Sharp Corp | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 |
| JP2007323432A (ja) * | 2006-06-01 | 2007-12-13 | Sharp Corp | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 |
| US8571331B2 (en) * | 2009-11-30 | 2013-10-29 | Xerox Corporation | Content based image selection for automatic photo album generation |
| CN103455743A (zh) * | 2013-08-13 | 2013-12-18 | 金硕澳门离岸商业服务有限公司 | 指纹认证方法和装置 |
| US10192097B2 (en) * | 2016-04-20 | 2019-01-29 | Novatek Microelectronics Corp. | Finger print detection apparatus and detection method thereof |
| JP7257631B2 (ja) * | 2016-05-17 | 2023-04-14 | ケルクエスト | 材料被写体の拡張認証の方法 |
| US9940544B2 (en) * | 2016-06-08 | 2018-04-10 | Adobe Systems Incorporated | Event image curation |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0329166B1 (en) * | 1988-02-17 | 1994-10-12 | Nippondenso Co., Ltd. | Fingerprint verification method employing plural correlation judgement levels and sequential judgement stages |
| JP3744620B2 (ja) * | 1996-09-25 | 2006-02-15 | ソニー株式会社 | 画像照合装置及び画像照合方法 |
| US5917928A (en) * | 1997-07-14 | 1999-06-29 | Bes Systems, Inc. | System and method for automatically verifying identity of a subject |
| DK2793189T3 (en) * | 2001-10-03 | 2017-02-06 | Retinalyze As | Assessment of lesions in an image |
-
2004
- 2004-03-30 JP JP2004098817A patent/JP2005284792A/ja active Pending
-
2005
- 2005-03-29 US US11/091,502 patent/US20050220327A1/en not_active Abandoned
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010050541A (ja) * | 2008-08-19 | 2010-03-04 | Fuji Xerox Co Ltd | 画像処理装置及び画像処理プログラム |
| JP2012238059A (ja) * | 2011-05-10 | 2012-12-06 | Azbil Corp | 照合装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050220327A1 (en) | 2005-10-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3742279B2 (ja) | 画像照合装置、画像照合方法及び画像照合プログラムを記録した記録媒体 | |
| JP4340553B2 (ja) | 生体情報照合装置 | |
| JP3725998B2 (ja) | 指紋照合装置及び照合方法 | |
| US8041956B1 (en) | Method and system for biometric authentication | |
| CN112132099A (zh) | 身份识别方法、掌纹关键点检测模型训练方法和装置 | |
| US7369702B2 (en) | Template-based cursive handwriting recognition | |
| US20070237367A1 (en) | Person verification apparatus and person verification method | |
| WO2004093013A1 (ja) | 画像照合装置、画像照合方法、及び画像照合プログラム | |
| WO1994023390A1 (en) | Apparatus for identifying person | |
| CN102549617A (zh) | 生物体信息处理装置、生物体信息处理方法以及生物体信息处理用计算机程序 | |
| US7272249B2 (en) | Fingerprint authentication method, program and device capable of judging inexpensively whether input image is proper or not | |
| JP2005284792A (ja) | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 | |
| JP6723547B2 (ja) | 皮膚情報処理プログラム及び皮膚情報処理装置 | |
| US7697733B2 (en) | Image collating apparatus, image collating method, image collating program product, and computer readable recording medium recording image collating program product | |
| US6707934B1 (en) | Apparatus and method for collating image | |
| CN100447806C (zh) | 两阶段混合指纹特征匹配方法、匹配装置及其应用 | |
| JP2002288642A (ja) | 掌紋部位分割装置とその掌紋部位分割方法、及び掌紋部位分割プログラム | |
| JPH11195119A (ja) | 指紋登録装置、指紋照合装置及び指紋照合方法 | |
| JP2865528B2 (ja) | 指紋照合装置 | |
| JP2006065764A (ja) | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 | |
| EP4652581A1 (en) | Fingerprint feature matching with graph neural networks | |
| JP2005275605A (ja) | 個人認証装置および個人認証方法 | |
| JP2865529B2 (ja) | 指紋照合装置 | |
| JP7381997B2 (ja) | 情報処理システム、情報処理方法及びプログラム | |
| CN101324920A (zh) | 搜索人脸显著特征点的方法及人脸比对方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20080711 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080722 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080917 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20081014 |