JP2006065764A - 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 - Google Patents
画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 Download PDFInfo
- Publication number
- JP2006065764A JP2006065764A JP2004250345A JP2004250345A JP2006065764A JP 2006065764 A JP2006065764 A JP 2006065764A JP 2004250345 A JP2004250345 A JP 2004250345A JP 2004250345 A JP2004250345 A JP 2004250345A JP 2006065764 A JP2006065764 A JP 2006065764A
- Authority
- JP
- Japan
- Prior art keywords
- image
- partial
- boundary
- adjacent
- partial region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images

















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/12—Fingerprints or palmprints
- G06V40/1365—Matching; Classification
Abstract
【課題】 部分領域をある程度の大きさに保ちたいという要請と部分領域の数を増やしたいという要請との二律背反する両要請をともに満足でき、かつ、隣接する部分領域同士の境目における画像データの連続性を画像の異同の判定に反映させる。
【解決手段】 指紋画像同士の異同判定に際してのテンプレートマッチングに用いる矩形の部分領域を、一方の画像内に隣接させて敷き詰め、それらの隣接部分領域4つで形成される十字の境目の交点を含む箇所に境目包含部分領域を設定し、隣接部分領域と境目包含部分領域とからなる複数部分領域をテンプレートとすることにより、部分領域をある程度の大きさに保ちながら部分領域の数を増やすことができ、しかも、隣接部分領域同士の境目を境目包含部分領域で補って、隣接部分領域同士の境目における画像データの連続性を画像の異同の判定に反映できるようにした。
【選択図】 図6
【解決手段】 指紋画像同士の異同判定に際してのテンプレートマッチングに用いる矩形の部分領域を、一方の画像内に隣接させて敷き詰め、それらの隣接部分領域4つで形成される十字の境目の交点を含む箇所に境目包含部分領域を設定し、隣接部分領域と境目包含部分領域とからなる複数部分領域をテンプレートとすることにより、部分領域をある程度の大きさに保ちながら部分領域の数を増やすことができ、しかも、隣接部分領域同士の境目を境目包含部分領域で補って、隣接部分領域同士の境目における画像データの連続性を画像の異同の判定に反映できるようにした。
【選択図】 図6
Description
本発明は、たとえば、指紋等の画像同士を照合して指紋等が一致するか否かを判定する画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体に関し、特に、1つの入力データと複数の参照データとを照合する画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体に関する。
複数の画像データを照合し、同一の対象を表す画像であるか否かを判定する画像照合装置として、1つの画像をテンプレートマッチング用の複数の部分領域に分割し、それぞれの部分領域が別の画像の中において最もよく一致する位置を調べ、それぞれの部分領域の移動ベクトルがそろっているかどうかによって画像の異同の判定を行うものがあった(特許文献1)。
特開2003−323618号公報
この背景技術では、照合の精度は部分領域の大きさに依存する。部分領域が小さすぎる(例えば指紋の稜線の幅と同程度)場合、もう一方の画像上で一致する位置が多数生じてしまうため、ある程度の大きさであることが必要である(例えば指紋の稜線が3本くらい入る大きさ)。
一方、部分領域の移動を計算し、移動ベクトルがそろっているかによって一致または不一致を判断する手法においては、照合の精度を確保する上で、ある程度の数の部分領域が必要である。
そのため、センサによって入力される画像の大きさが小さい場合には、前述の部分領域の大きさの条件を満たした上で、背景技術のように部分領域を互いに重なりのないようにすると、十分な数の部分領域を確保することができない。
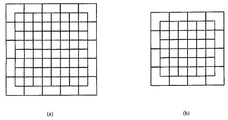
例えば、必要な精度を得るために、部分領域が20個以上必要であるとする。
この場合、図18(a)のように面積の大きいセンサでは条件を満たすが、図18(b)のような面積の小さいセンサでは条件を満たすことができない。
さらに、前述の背景技術では、互いに隣接する部分領域同士の境目部分における画像の連続性が、移動ベクトルに基づいた画像の一致または不一致の判断に反映されない。そのため、部分領域の取り方によって照合性にばらつきが生じた。
例えば、図19(a)と図19(b)の画像を照合する際、図19(a)のE1,E2のように重なりの無い部分領域が設定されているとする。
部分領域1,2の最大一致位置を図19(b)中で探索を行なうと、それぞれE1b,E2bのような位置になり、画像が異なるのにもかかわらず、類似判断するための閾値の設定によっては、類似の移動ベクトルと判断される可能性がある。
部分領域1,2の最大一致位置を図19(b)中で探索を行なうと、それぞれE1b,E2bのような位置になり、画像が異なるのにもかかわらず、類似判断するための閾値の設定によっては、類似の移動ベクトルと判断される可能性がある。
これは、部分領域の境目では画像の連続性の特性が使われず、両画像が相違する場所がちょうど部分領域の境目となると違いの検出能力が低下するためである。
以上要するに、前述の背景技術では、テンプレートマッチング用の部分領域をある程度の大きさに保ちたいという要請と部分領域の数を増やしたいという要請との二律背反する両要請を十分には満足することができず、かつ、隣接する部分領域同士の境目部分における画像データの連続性が画像の異同の判定に反映されないことに起因して画像の異同の誤判定が生じてしまうという欠点があった。
本発明は、係る実情に鑑み考え出されたものであり、その目的は、部分領域をある程度の大きさに保ちたいという要請と部分領域の数を増やしたいという要請との二律背反する両要請をともに満足でき、かつ、隣接する部分領域同士の境目における画像データの連続性を画像の異同の判定に反映させることができるようにすることである。
この発明のある局面に係る画像照合装置は、第1の画像と第2の画像とを照合するものであって、テンプレートマッチングに用いるための部分領域を複数第1の画像内に設定する部分領域設定手段と、部分領域設定手段により設定された複数部分領域の画像のそれぞれに対応して、第2の画像において最大の一致度となる部分領域の第2の画像内での位置である最大一致度位置を探索する最大一致度位置探索手段と、第1の画像内での部分領域の位置と、その部分領域に対応の最大一致度位置との、位置関係を示す位置関係量であって、複数部分領域毎の位置関係量のうち、その位置関係量が所定レンジに該当する部分領域に関する情報から第1の画像と第2の画像との類似度を計算して画像類似度として出力する類似度計算手段と、類似度計算手段により出力された画像類似度に基づいて第1の画像と第2の画像とが一致するか否か判定する判定手段とを備え、部分領域設定手段は、第1の画像内に互いに重複しない状態で隣接する複数の隣接部分領域を設定する隣接部分領域設定手段と、隣接部分領域設定手段により設定された隣接部分領域上でかつその隣接部分領域の境目を含む位置に境目包含部分領域を設定する境目包含部分領域設定手段とを含み、隣接部分領域と境目包含部分領域とを、複数部分領域として設定する。
このように、境目包含部分領域を設定することにより、部分領域をある程度の大きさに保ちたいという要請と部分領域の数を増やしたいという要請との二律背反する両要請をともに満足でき、照合精度の確保に必要な大きさの部分領域を設定し、かつ照合精度の確保に必要な数の部分領域を設定することができる。しかも、境目包含部分領域が、隣接部分領域の境目を含む位置に設定されているために、隣接部分領域の境目を境目包含部分領域によって補うことによって、隣接部分領域同士の境目における画像データの連続性を画像の異同の判定に極力反映させることができる。
この発明の他の局面に係る画像照合装置においては、第1の画像と第2の画像とを照合するものであって、第1の画像内に複数設定されたテンプレートマッチングに用いる部分領域の画像データであって、互いに重複しない状態で隣接する複数の隣接部分領域の画像データを記憶する部分領域画像データ記憶手段と、互いに隣接する隣接部分領域同士の境目を含む境目包含部分領域の画像データを生成する手段であって、部分領域画像データ記憶手段に記憶されている互いに隣接する隣接部分領域同士の画像データのうち境目包含部分領域が重なる部分の画像データを寄せ集めてその境目包含部分領域の画像データを生成する境目包含部分領域画像データ生成手段と、第2の画像を入力する画像入力手段と、部分領域画像データ記憶手段が記憶している複数の隣接部分領域の画像データからなる画像と境目包含部分領域画像データ生成手段が生成した境目包含部分領域の画像データからなる画像とを含む複数部分領域の画像のそれぞれに対応して、画像入力手段により入力された第2の画像において最大の一致度となる部分領域の第2の画像内での位置である最大一致度位置を探索する最大一致度位置探索手段と、第1の画像内での前記部分領域の位置と、その部分領域に対応する最大一致度位置との、位置関係を示す位置関係量であって、複数部分領域毎の位置関係量のうち、その位置関係量が所定レンジに該当する部分領域に関する情報から第1の画像と前記第2の画像との類似度を計算して画像類似度として出力する類似度計算手段と、類似度計算手段により出力された画像類似度に基づいて第1の画像と第2の画像とが一致するか否か判定する判定手段とを備えている。
このように、境目包含部分領域を画像の異同判定に用いることにより、部分領域をある程度の大きさに保ちたいという要請と部分領域の数を増やしたいという要請との二律背反する両要請をともに満足でき、照合精度の確保に必要な大きさの部分領域を設定し、かつ照合精度の確保に必要な数の部分領域を設定することができる。しかも、境目包含部分領域の画像データが、隣接部分領域の境目を含む位置の画像データであるために、隣接部分領域の境目を境目包含部分領域によって補うことによって、隣接部分領域同士の境目における画像データの連続性を画像の異同の判定に極力反映させることができる。さらに、隣接部分領域の画像データを用いて境目包含部分領域の画像データを生成するため、隣接部分領域の画像データを記憶する部分領域画像データ記憶手段が境目包含部分領域の画像データまで記憶するする必要がなく、記憶容量の増加を抑えることができる。
前述の画像照合装置は、好ましくは、前記複数部分領域が、全て同型の矩形の部分領域であり、隣接部分領域は、第1の画像内全体に敷き詰められた状態で設定され、境目包含部分領域は、互いに隣接する4個の隣接部分領域により形成される境目の交点を包含する。
このように部分領域を配置することにより、境目包含部分領域が漏れなく隣接部分領域の境目を包含でき、隣接部分領域同士の境目における画像データの連続性の画像の異同判定への反映を極力効率的に行なうことができる。しかも、それぞれの部分領域の位置の計算が簡素化される。
前述の画像照合装置は、好ましくは、境目包含部分領域が、全隣接部分領域の内画像の特徴がよく表れる隣接部分領域同士の境目を包含する個所に限定された部分領域である。
部分領域をこのように構成することにより、画像の特徴がよく表れる箇所を重点的に画像の異同の判定に使用することができ、かつ特徴のあまり表れない部分の照合を省くことにより、高速かつ計算量の少ない照合が可能である。
前述の画像照合装置は、好ましくは、類似度計算手段は、画像の特徴がよく表れる個所に限定された境目包含部分領域における類似度計算に際しての重付けを他の部分領域に比べて大きくして前記類似度を計算する。
このような構成により、画像の特徴がよく表れる個所をより大きな重付けで照合し、画像の異同の判定制度を向上させることができながらも、特徴のあまり表れない部分の照合を簡素化し、高速かつ計算量の少ない照合が可能である。
前述の画像照合装置は、好ましくは、前記第1の画像と前記第2の画像とが、生体に由来する画像である。
このような構成により、生体に由来する画像の異同判定を高精度で行なうことができる。
前述の画像照合装置は、好ましくは、前記生体に由来する画像が、指紋に由来する画像である。
このような構成により、指紋に由来する画像の異同判定を高精度で行なうことができる。
この発明のさらに他の局面における画像照合方法は、第1の画像と第2の画像とを照合するものであって、テンプレートマッチングに用いるための部分領域を複数前記第1の画像内に設定する部分領域設定ステップと、部分領域設定ステップにより設定された複数の部分領域の画像のそれぞれに対応して、第2の画像において最大の一致度となる部分領域の第2の画像内での位置である最大一致度位置を探索する最大一致度位置探索ステップと、第1の画像内での部分領域の位置と、その部分領域に対応の最大一致度位置との、位置関係を示す位置関係量であって、複数部分領域毎の位置関係量のうち、その位置関係量が所定レンジに該当する部分領域に関する情報から第1の画像と第2の画像との類似度を計算して画像類似度として出力する類似度計算ステップと、類似度計算ステップにより出力された画像類似度に基づいて第1の画像と第2の画像とが一致するか否か判定する判定ステップとを備え、部分領域設定ステップは、第1の画像内に設定された互いに隣接する部分領域の境目を含む部分領域としてその隣接する部分領域上に重ねて重複部分領域を設定する重複部分領域設定ステップを含む。
このように、境目包含部分領域を設定することにより、部分領域をある程度の大きさに保ちたいという要請と部分領域の数を増やしたいという要請との二律背反する両要請をともに満足でき、照合精度の確保に必要な大きさの部分領域を設定し、かつ照合精度の確保に必要な数の部分領域を設定することができる。しかも、境目包含部分領域が、隣接部分領域の境目を含む位置に設定されているために、隣接部分領域の境目を境目包含部分領域によって補うことによって、隣接部分領域同士の境目における画像データの連続性を画像の異同の判定に極力反映させることができる。
この発明のさらなる他の局面における画像照合方法は、第1の画像と第2の画像とを照合するものであって、第1の画像内に複数設定されたテンプレートマッチングに用いる部分領域の画像データであって、互いに重複しない状態で隣接する複数の隣接部分領域の画像データを記憶する部分領域画像データ記憶ステップと、互いに隣接する隣接部分領域同士の境目を含む境目包含部分領域の画像データを生成するステップであって、部分領域画像データ記憶ステップにより記憶された互いに隣接する隣接部分領域同士の画像データのうち境目包含部分領域が重なる部分の画像データを寄せ集めてその境目包含部分領域の画像データを生成する境目包含部分領域画像データ生成ステップと、第2の画像を入力する画像入力ステップと、部分領域画像データ記憶ステップにより記憶した複数の隣接部分領域の画像データからなる画像と境目包含部分領域画像データ生成ステップにより生成された境目包含部分領域の画像データからなる画像とを含む複数部分領域の画像のそれぞれに対応して、画像入力ステップにより入力された第2の画像において最大の一致度となる部分領域の前記第2の画像内での位置である最大一致度位置を探索する最大一致度位置探索ステップと、第1の画像内での部分領域の位置と、その部分領域に対応する最大一致度位置との、位置関係を示す位置関係量であって、複数部分領域毎の位置関係量のうち、その位置関係量が所定レンジに該当する部分領域に関する情報から第1の画像と第2の画像との類似度を計算して画像類似度として出力する類似度計算ステップと、類似度計算ステップにより出力された画像類似度に基づいて第1の画像と第2の画像とが一致するか否か判定する判定ステップとを備えている。
この発明のさらなる他の局面における画像照合プログラムは、前述の画像照合方法をコンピュータに実行させるためのものである。
この発明のさらなる他の局面におけるコンピュータ読取り可能な記録媒体は、前述の画像照合プログラムが記録されている。
本発明によれば、第1の画像内に設定された互いに隣接する部分領域の境目を含む部分領域として該隣接する部分領域上に重ねて部分領域を設定するために、照合精度の確保に必要な大きさの部分領域を設定でき、かつ照合精度の確保に必要な数の部分領域を設定することができる。さらに、重ねて設定される部分領域が隣接する部分領域の境目を含む部分領域であり、その部分領域の画像データをも含めて画像の異同の判定が行なわれるために、互いに隣接する部分領域同士の境目部分における画像の連続性を画像の異同の判定に反映することができ、部分領域の境目における連続性が画像の移動に反映されないことによる誤判定の不都合を軽減することができる。
さらに、隣接部分領域の画像データを用いて境目包含部分領域の画像データを生成する場合には、隣接部分領域の画像データを記憶する部分領域画像データ記憶手段が境目包含部分領域の画像データまで記憶するする必要がなく、記憶容量の増加を抑えることができる。
重複部分領域設定手段により、画像中で特徴がよく現れる部分に重点的に部分領域を設定した場合には、精度が高い照合を高速に実行することが可能になる。すなわち、部分領域をこのように配置することにより、画像の一部をより大きな重み付けで照合することが可能であり、また特徴のあまり現れない部分の照合を簡素化し、高速かつ計算量の少ない照合が可能となる。
以下、本発明の各実施の形態について図面を参照しながら説明する。
ここでは、2つの画像データを照合する。照合の対象となる画像データとして指紋画像データを例示しているが、これに限定されず、個体(個人)毎に似ているが一致することはない生体の他の特徴による画像データであってもよい。
[実施の形態1]
図1は実施の形態1に係る画像照合装置1のブロック図である。
図1は実施の形態1に係る画像照合装置1のブロック図である。
図2は各実施の形態に係る画像照合装置が搭載されるコンピュータの構成図である。図2を参照してコンピュータは、画像入力部101、CRT(陰極線管)や液晶などからなるディスプレイ610、該コンピュータ自体を集中的に管理し制御するためのCPU(中央処理装置の略)622、ROM(Read Only Memory)またはRAM(ランダムアクセスメモリの略)を含んで構成されるメモリ624、固定ディスク626、FD(フレキシブルディスク)632が着脱自在に装着されて、装着されたFD632をアクセスするFD駆動装置630、CD−ROM(Compact Disc Read Only Memory)642が着脱自在に装着されて、装着されたCD−ROM642をアクセスするCD−ROM駆動装置640、通信ネットワーク300と、該コンピュータとを通信接続するための通信インターフェィス680、およびキーボード650およびマウス660を有する入力部700を含む。これらの各部はバスを介して通信接続される。
コンピュータには、カセット形式の磁気テープが着脱自在に装着されて磁気テープをアクセスする磁気テープ装置が設けられてもよい。
図1を参照して画像照合装置は、画像入力部101、図2のメモリ624または固定ディスク626に対応のメモリ102、バス103および照合処理部11を備える。照合処理部11は画像補正部104、最大一致度位置探索部105、移動ベクトルに基づく類似度計算部(以下、類似度計算部と呼ぶ)106、照合判定部107および制御部108を含む。照合処理部11の各部は対応のプログラムが実行されることによりその機能が実現される。
画像入力部101は指紋センサを含み、該指紋センサにより読込まれた指紋に対応の指紋画像データを出力する。指紋センサには光学式、圧力式および静電容量方式などのいずれを適用してもよい。メモリ102には画像データや各種の計算結果などが格納される。バス103は各部間の制御信号やデータ信号を転送するために用いられる。画像補正部104は画像入力部101から入力された指紋画像データについての濃淡補正を行なう。最大一致度位置探索部105は一方の指紋画像の複数の部分領域をテンプレートとし、該テンプレートと他方の指紋画像内で最も一致度の高い位置を探索する、いわゆるテンプレートマッチング部のようなものである。類似度計算部106はメモリ102に格納された最大一致度位置探索部105の結果情報を用いて、後述の移動ベクトルに基づく類似度を計算する。照合判定部107は類似度計算部106が算出した類似度により一致・不一致を判定する。制御部108は照合処理部11の各部の処理を制御する。
図1の画像照合装置1において、2つの指紋画像を照合するために、2つの指紋画像に対応の画像Aと画像Bを照合する手順について図3のフローチャートに従い説明する。
初めに制御部108は、画像入力部101へ画像入力開始の信号を送り、その後、画像入力終了信号を受信するまで待機する。画像入力部101は照合を行なう画像Aを入力し、バス103を通してメモリ102の所定アドレスへ格納する(ステップT1)。画像入力部101は、画像Aの入力が完了した後、制御部108に画像入力終了信号を送る。
制御部108は、画像入力終了信号を受信すると、再度、画像入力部101へ画像入力開始の信号を送り、その後、画像入力終了信号を受信するまで待機する。画像入力部101は照合を行なう画像Bを入力し、バス103を通してメモリ102の所定アドレスへ格納する(ステップT1)。画像入力部101は画像Bの入力が完了した後、制御部108に画像入力終了信号を送る。
次に制御部108は画像補正部104に画像補正開始信号を送り、その後、画像補正終了信号を受信するまで待機する。多くの場合、入力画像は画像入力部101の特性や指紋自体の乾燥度合いや指を押し付ける圧力に対して各画素の濃淡値や全体の濃度分布が変化するので画質が一様ではないから、入力画像データをそのまま照合に用いることは適当でない。画像補正部104は、画像入力時の条件の変動を抑制するように入力画像の画質を補正する(ステップT2)。具体的には、入力画像データに対応の画像全体もしくは画像を分割した小領域ごとに、ヒストグラムの平坦化(「コンピュータ画像処理入門」総研出版P98)や画像の二値化処理(「コンピュータ画像処理入門」総研出版P66−69)などを、メモリ102に格納された画像AとBに施す。
画像補正部104は画像Aと画像Bに対する画像補正処理の終了後、制御部108に画像補正処理終了信号を送る。
以降で、画像補正部104により画像補正処理を施された画像A,画像Bに対して行なう照合処理(ステップT3)が行われる。この処理を図4のフローチャートに従って説明する。
制御部108は最大一致度位置探索部105へテンプレートマッチング開始信号を送り、テンプレートマッチング終了信号を受信するまで待機する。最大一致度位置探索部105では、ステップS001からステップS008に示されるようなテンプレートマッチング処理が開始される。ステップS001ではカウンタの変数iを1に初期化する。ステップS002では画像Aから部分領域Riとして規定される部分領域の画像をテンプレートマッチングに用いるテンプレートとして設定する。
このS002の部分領域Riのテンプレート設定処理のサブルーチンプログラムのフローチャートが、図5に示されている。図5を参照して、部分領域Riのテンプレート設定処理の内容を説明する。ステップS030では、画像A内に部分領域Riを重ねることなく設定可能か否かの判断がなされる。画像A内に部分領域Riを重ねることなく設定可能な領域がまだ残っている場合には、ステップS030によりYESの判断がなされてステップS031により、互いに重なることなく隣接された部分領域(隣接部分領域)Riをテンプレートとして設定する処理がなされる。
一方、画像A内に隣接部分領域Riを重ねることなく設定できる領域が残っていない場合には、ステップS030によりNOの判断がなされて、ステップS032により、隣接する4つのテンプレート(隣接テンプレート)からなる領域の中心にRiを二重重ねで設定可能であるか否かの判断がなされる。この二重重ねの部分領域Riは、たとえば図6(a)、(b)に示すように、隣接する4つのテンプレートからなる部分領域のそれぞれの中心に重ねて設定される部分領域のことであり、4つの隣接部分領域の境目を含む境目包含部分領域である。画像A内に二重重ねの境目包含部分領域Riを設定可能な領域が残っている場合には、ステップS032によりYESの判断がなされて、ステップS033により、二重重ねの境目包含部分領域Riをテンプレートとして設定する処理がなされる。一方、境目包含部分領域Riを設定可能な領域が残っていない場合には、ステップS032によりNOの判断がなされ、ステップS034により、現在のiの値をnにセットする処理がなされる。次に、ステップS035により、テンプレート設定完了フラグをONにする処理がなされる。ステップS034により設定されたnの値は、画像A内に設定された部分領域Riの総数(隣接部分領域と境目包含部分領域との総和)となる。
ここでは、部分領域Riは計算を簡単にするために矩形状としているが、これに限定されるものではない。次に図4に戻り、ステップS003により、テンプレート設定完了フラグがONになっているか否かの判断がなされる。前述のステップS035の処理が未だ行なわれていない段階では、ステップS003によりNOの判断がなされて、ステップS005→ステップS006→ステップS007→ステップS008→ステップS002→ステップS003のループを巡回する。このループの巡回毎にステップS008によりiが「1」ずつ加算更新され、その都度ステップS002による部分領域Riのテンプレート設定がなされ、画像A内に二重重ねの境目包含部分領域Riを設定し尽くした段階で、ステップS035によるテンプレート設定完了フラグをONにする処理がなされる。すると、その段階で、ステップS003によりYESの判断がなされ、ステップS004によるテンプレート設定完了フラグをOFFにする処理がなされた後、ステップS009へ制御が進む。
ステップS005ではステップS002で設定したテンプレートに対し、画像B内で最も一致度の高い、つまり画像内のデータが最も一致する場所を探索する。具体的には、テンプレートとして用いる部分領域Riの左上の角を基準とした座標(x,y)の画素濃度をRi(x,y)とし、画像Bの左上の角を基準とした座標(s、t)の画素濃度をB(s,t)とし、部分領域Riの幅をw,高さをhとし、また、画像AとBの各画素の取りうる最大濃度をV0とし、画像Bにおける座標(s、t)での一致度Ci(s,t)をたとえば以下の(式1)に従い各画素の濃度差を元に計算する。

画像B内において座標(s、t)を順次更新して座標(s、t)における一致度C(s,t)を計算し、その中で最も大きい値を取る位置が最も一致度が高いとし、その位置での部分領域の画像を部分領域Miとし、その位置での一致度を最大一致度Cimaxとする。ステップS006ではステップS005で算出した部分領域Riの画像B内における最大一致度Cimaxをメモリ102の所定アドレスに記憶する。ステップS007では、移動ベクトルViを以下の(式2)に従い計算して求めて、メモリ102の所定アドレスに記憶する。
ここで、上述のように、画像Aに設定された位置Pに対応の部分領域Riに基づいて、画像B内をスキャンして部分領域Riと最も一致度が高い位置Mの部分領域Miが特定されたとき、位置Pから位置Mへの方向ベクトルを、移動ベクトルと呼ぶ。これは、指紋センサにおける指の置かれ方は一様でないことから、一方の画像、たとえば画像Aを基準にすると他方の画像Bは移動したように見えることによる。
(式2) Vi=(Vix、Viy)=(Mix−Rix、Miy−Riy)
(式2)で、変数RixとRiyは部分領域Riの基準位置のx座標とy座標であり、たとえば画像A内における部分領域Riの左上角の座標に対応する。また変数MixとMiyは部分領域Miの探索結果である最大一致度Cimaxの位置でのx座標とy座標であり、たとえば画像B内におけるマッチングした位置での部分領域Miの左上角の座標に対応する。
(式2)で、変数RixとRiyは部分領域Riの基準位置のx座標とy座標であり、たとえば画像A内における部分領域Riの左上角の座標に対応する。また変数MixとMiyは部分領域Miの探索結果である最大一致度Cimaxの位置でのx座標とy座標であり、たとえば画像B内におけるマッチングした位置での部分領域Miの左上角の座標に対応する。
ステップ002〜S008の処理を繰返し実行し、すべての部分領域Riに関してテンプレートマッチングを行ない、それぞれの部分領域Riの最大一致度Cimaxと移動ベクトルViとの計算を行ない、前述したように、画像A内における境目包含部分領域Riの設定できる残りエリアがなくなった段階で、制御が、ステップS004→ステップS009へ進む。
最大一致度位置探索部105は上記のように順次計算されるすべての部分領域Riに関する最大一致度Cimaxと移動ベクトルViとをメモリ102の所定アドレスに格納したのち、テンプレートマッチング終了信号を制御部108に送り、処理を終了する。
続いて制御部108は類似度計算部106に類似度計算開始信号を送り、類似度計算終了信号を受信するまで待機する。類似度計算部106は、メモリ102に格納されているテンプレートマッチングで得られた各部分領域Riの移動ベクトルViや最大一致度Cimaxなどの情報を用いて、図4のステップS009からステップS021に示される処理を行ない類似度計算を行なう。
ステップS009では類似度P(A,B)を0に初期化する。ここで類似度P(A,B)とは、画像Aと画像Bの類似度を格納する変数とする。ステップS010では基準とする移動ベクトルViのインデックスiを1に初期化する。ステップS011では、基準となる移動ベクトルViに関する類似度Piを0に初期化する。ステップS012では、移動ベクトルVjのインデックスjを1に初期化する。ステップS013では、基準移動ベクトルViと移動ベクトルVjとのベクトル差dVijを以下の(式3)に従い計算する。
(式3) dVij=|Vi−Vj|=sqrt((Vix−Vjx)^2+(Viy−Vjy)^2)
ここで、変数VixとViyは移動ベクトルViのx方向成分とy方向成分を示し、変数VjxとVjyは移動ベクトルVjのx方向成分とy方向成分を示し、変数sqrt(X)はXの平方根、X^2はXの二乗を計算する計算式である。
ここで、変数VixとViyは移動ベクトルViのx方向成分とy方向成分を示し、変数VjxとVjyは移動ベクトルVjのx方向成分とy方向成分を示し、変数sqrt(X)はXの平方根、X^2はXの二乗を計算する計算式である。
ステップS014では、移動ベクトルViとVjのベクトル差dVijに関し所定の定数εと比較し、移動ベクトルViと移動ベクトルVjが実質的に同一の移動ベクトルとみなすことが可能かを判断する。ベクトル差dVijが定数εより小さければ、移動ベクトルViと移動ベクトルVjが実質的に同一と見なして処理をステップS015に移し、逆に大きければ実質的に同一とは見なさず処理をステップS016に移す。ステップS015では類似度Piを以下の式(4)〜(6)で増加させる。
(式4) Pi=Pi+α
(式5) α=1
(式6) α=Cimax
(式4)における変数αは類似度Piを増加させる値である。(式5)のようにα=1とした場合には、類似度Piは基準とした移動ベクトルViと同一の移動ベクトルを持つ部分領域の個数となる。また、(式6)のようにα=Cimaxとした場合には、類似度Piは基準とした移動ベクトルViと同一の移動ベクトルを持つ部分領域に関するテンプレートマッチング時の最大一致度の総和となる。またベクトル差dVijの大きさに応じて変数αの値を小さくするなどしても構わない。
(式5) α=1
(式6) α=Cimax
(式4)における変数αは類似度Piを増加させる値である。(式5)のようにα=1とした場合には、類似度Piは基準とした移動ベクトルViと同一の移動ベクトルを持つ部分領域の個数となる。また、(式6)のようにα=Cimaxとした場合には、類似度Piは基準とした移動ベクトルViと同一の移動ベクトルを持つ部分領域に関するテンプレートマッチング時の最大一致度の総和となる。またベクトル差dVijの大きさに応じて変数αの値を小さくするなどしても構わない。
ステップS016はインデックスjが部分領域の個数nより小さいかどうかを判定し、インデックスjが部分領域の個数nより小さい場合は処理をステップS017に移し、大きい場合には処理をステップS018に移す。ステップS017ではインデックスjの値を1増加させる。ステップS011からステップS017の処理により、基準とした移動ベクトルViに関して、同じ移動ベクトルを持つと判定される部分領域の情報を用いた類似度Piが計算される。ステップS018では移動ベクトルViを基準とした場合の類似度Piと変数P(A,B)と比較を行ない、類似度Piが現在までの最大の類似度(変数P(A,B)の値)より大きければ処理をS019に移し、小さければ処理をS020に移す。
ステップS019では、変数P(A,B)に移動ベクトルViを基準とした場合の類似度Piの値を設定する。ステップS018,S019では、移動ベクトルViを基準とした場合の類似度Piが、この時点までに計算された他の移動ベクトルを基準にした場合の類似度の最大値(変数P(A,B)の値)と比べ大きい場合には、基準としている移動ベクトルViが現在までのインデックスiの中で最も基準として正当であるとしている。
ステップS020では基準とする移動ベクトルViのインデックスiの値と部分領域の個数(変数nの値でありS034により設定された値)を比較する。現在のインデックスiが部分領域の個数より小さければ処理をステップS021に移す。ステップS021ではインデックスiを1増加させる。
ステップS009からステップS021により、画像Aと画像Bにおける類似度が変数P(A,B)の値として計算される。類似度計算部106は上記のように計算した変数P(A,B)の値をメモリ102の所定アドレスに格納し、制御部108へ類似度計算終了信号を送り、処理を終了する。
続いて制御部108は照合判定部107に照合判定開始信号を送り、照合判定終了信号を受信するまで待機する。照合判定部107は照合し判定する(ステップT4)。具体的には、メモリ102に格納された変数P(A,B)の値で示される類似度と予め定められた照合閾値Tとを比較する。比較結果、変数P(A,B)≧Tならば画像Aと画像Bは同一指紋から採取されたものと判定しメモリ102の所定アドレスへ照合結果として‘一致’を示す値、たとえば‘1’を書込み、そうでなければ異なる指紋から採取されたものと判定し、メモリ102の所定アドレスへ照合結果として‘不一致’を示す値、たとえば‘0’を書込む。その後、制御部108へ照合判定終了信号を送り処理を終了する。
最後に制御部108がメモリ102に格納された照合結果をディスプレイ610またはプリンタ690を介して出力して(ステップT5)、画像照合を終了する。
本実施の形態において、画像補正部104、最大一致度位置探索部105、類似度計算部106、照合判定部107および制御部108のすべてあるいは一部は処理手順をプログラムとして記憶させたメモリ624などのROMとそれを実行するためのCPU622などの演算処理装置を用いて構成してもよい。
[実施の形態2]
前述の実施の形態1では、画像内に互いに隣接する部分領域を設定し終わった後その部分領域上に二重重ねの境目包含部分領域を設定し、その境目包含部分領域を設定できる残りエリアがなくなった段階で部分領域の設定を終了するように制御しているが、この実施の形態2では、予め定められた数nだけ部分領域を設定した段階で部分領域の設定を終了するように制御される。この実施の形態2を、図8〜図11に基づいて説明する。
前述の実施の形態1では、画像内に互いに隣接する部分領域を設定し終わった後その部分領域上に二重重ねの境目包含部分領域を設定し、その境目包含部分領域を設定できる残りエリアがなくなった段階で部分領域の設定を終了するように制御しているが、この実施の形態2では、予め定められた数nだけ部分領域を設定した段階で部分領域の設定を終了するように制御される。この実施の形態2を、図8〜図11に基づいて説明する。
図8は、類似度計算を示すフローチャートである。図4に示した実施の形態1における類似度計算との相違点は、ステップS002による部分領域Riのテンプレート設定処理の具体的内容と、ステップS015aによるPiの加算処理の具体的内容である。その他の処理は、図4に示す実施の形態1と同じである。
図8のステップS002の部分領域Riのテンプレート設定処理のサブルーチンプログラムのフローチャートを、図9に示す。図9を参照して、ステップS040により、画像A内に部分領域Riを重ねることなく設定可能であるか否かの判断がなされ、可能である場合にはステップS041により、重ならない隣接部分領域Riをテンプレートとして設定する処理がなされる。一方、画像A内に隣接部分領域Riを重ねることなく設定してそれ以上重ねることなくなり隣接部分領域Riを設定するエリアが残っていない状態となったときに、ステップS040によりNOの判断がなされてステップS042により、重ね合わせ開始フラグがONになっているか否かの判断がなされる。画像A内に隣接部分領域Riを重ねることなく設定できる残りエリアが存在しなくなってから最初の部分領域Riのテンプレート設定処理の実行に際しては、重ね合わせ開始フラグがONになっていないために、制御がステップS043へ進み、重ね合わせ開始フラグをONにする処理がなされる。次に制御がステップS044へ進み、重ね合わせ開始値K=iにする処理がなされる。すなわち、画像A内に隣接部分領域Riを重ねることなく設定する処理を行なって、これ以上重ねることなく設定できる残りエリアが存在しなくなった段階での部分領域の数iを、重ね合わせ開始値Kにセットする処理がステップS044によりなされる。
次に制御がステップS045へ進み、画像Aの中心を算出する処理がなされる。次に制御がステップS046へ進み、i≦nであるか否かの判断がなされる。このnは、画像A内に設定する予め定められた全部分領域数である。画像A内のすべてに隣接部分領域Riを重ねることなく敷き詰めたときの隣接部分領域Riの数よりも大きく、かつ、境目包含部分領域を隣接部分領域内のすべてに敷き詰めたときの合計部分領域の数よりも少ない値に、nが設定されている。
現在のiの値がnよりも未だ少ない場合には、制御がステップS047へ進み、ステップS045により算出した画像Aの中心から近い位置に境目包含部分領域Riをテンプレートとして設定する処理がなされる。このステップS047の処理は、繰返し実行されてその都度ステップS008によりiの値が「1」ずつ加算更新され、iの値がnに達するまで繰返し実行される。その際、ステップS040により最初にNOの判断がなされた段階で重ね合わせ開始フラグがONにセットされるために、それ以降の実行に際しては、ステップS042によりYESの判断がなされて、ステップS043〜S045の処理を行なうことなく直接制御がステップS046へ進むこととなる。
iの値がnに達した段階で、制御がステップS048へ進み、テンプレート設定完了フラグをONにする処理がなされ、ステップS049により、重ね合わせ開始フラグをOFFにする処理がなされる。
ステップS047の処理により、境目包含部分領域Riは、画像Aの中心すなわち対象画像が指紋の場合における画像の特徴のよく現れる部分から優先的に配置されることとなる。
次に、図8のステップS015aに示したPiの加算処理のサブルーチンプログラムのフローチャートが、図10に示されている。図10では、Piの加算処理の第1の例を(a)に示し、第2の例を(b)に示している。
まず、図10(a)を参照して、ステップS055により、現在のiの値が前述のステップS044によりセットされた重ね合わせ開始値K以上であるか否かの判断がなされる。以上でない場合すなわち未だ境目包含部分領域の設定が行なわれていない場合には、制御がステップS056へ進み、αの値を「1」にセットする処理がなされ、ステップS057により、現在のPiの値を「α」加算する処理がなされる。
一方、現在のiの値が重ね合わせ開始値K以上である場合すなわち現在既に境目包含部分領域の設定が行なわれている場合には、制御がステップS058へ進み、α=1+(n−i)/nにする処理がなされる。そして、ステップS057により、現在のPiの値にステップS058によりセットされたαの値を加算する処理がなされる。
ステップS058に示すα=1+(n−i)/nは、nの値が増加するに従ってαの値が小さくなり、iの値がその最大であるnに達した段階で、αの値が「1」となる。したがって、ステップS047により中心から近い位置から優先的に境目包含部分領域Riがテンプレートとして設定されるために、中心から近い位置の境目包含部分領域Riほどαの値が大きくなり、中心から遠ざかるに従ってαの値が徐々に小さくなる。その結果、画像における特徴がよく現れる中心部分ほど重み付けを大きくして画像の異同の判定がなされることとなる。
図10(b)に示すPiの加算処理の他の例では、ステップS060によりNOの判断がなされた場合に、ステップS061により、α=Cimaxにする処理がなされる。そして、ステップS062により、現在のPiの値にステップS061によりセットされたαの値が加算されることとなる。
一方、ステップS060によりYESの判断がなされた場合には、ステップS063によりα=Cimax{1+(n−i)/n}にする処理がなされる。このステップS063も、前述のステップS058と同様に、iの値が増加するに従ってαの値が減少し、iの値がその最大であるnに達した段階でαの値がCimaxとなる。したがって、図10(b)に示す他の例でも、画像の特徴がよく現れる中心部分ほど画像の異同の判定に際しての重み付けが大きくなる。
図11は、実施の形態2において、境目包含部分領域が設定された状態を示す図である。このように、画像の特徴がよく現れる中心部分に重点的に部分領域を設定し、特徴があまり現れない周辺部分には境目包含部分領域が設定されない状態となるために、照合精度を向上できながらも効率のよい照合が可能となる。
[実施の形態3]
実施の形態1および実施の形態2では、照合されるべき画像AとBは画像入力部101から入力されていたが、本実施の形態3では、照合されるべき2つの画像のうち一方の画像は予め登録されており、他方の画像のみが入力される。
実施の形態1および実施の形態2では、照合されるべき画像AとBは画像入力部101から入力されていたが、本実施の形態3では、照合されるべき2つの画像のうち一方の画像は予め登録されており、他方の画像のみが入力される。
図12は本実施の形態3に係る画像照合装置のブロック図である。図2の画像照合装置2と図1の画像照合装置1とを比較し、異なる点は画像照合装置2は画像照合装置1の構成に追加して登録データ記憶部202を備え、照合処理部11に代替して照合処理部12を備える点にある。照合処理部12は照合処理部11の構成に追加して指紋登録部206と登録データ読出し部207を有する。
登録データ記憶部202には照合を行なう一方の画像から照合に使用するデータ部のみが予め記憶される。指紋登録部206は画像入力部101から入力された指紋画像から照合に必要な情報を抽出し登録データ記憶部202に記憶させる。登録データ読出し部207は登録データ記憶部202から照合に必要な情報をメモリ102に読出す。
まず、照合を行なう画像対を画像A、画像Bとする。一般的にはどちらか一方の画像を登録データ記憶部202に記憶しておき、他方の逐次入力される画像と登録画像との照合を行ない、登録画像と入力画像が同一の指紋から採取されたものであるか判定する。ここでは画像Aを登録画像とし、画像Bを入力画像とする。
第一に画像Aを登録画像として登録を行なう処理を図13のフローチャートに従い説明する。
まず、制御部108は画像入力部101へ画像入力開始信号を送り、画像入力終了信号を受信するまで待機する。画像入力部101は画像Aの入力を行ない、バス103を通してメモリ102の所定アドレスへ画像Aを格納する(ステップT8)。画像入力部101は、画像入力完了後、制御部108に画像入力終了信号を送る。
次に制御部101は画像補正部104に画像Aに対する画像補正開始信号を送り、画像補正終了信号を受信するまで待機する。画像補正部104は、メモリ102に格納されている画像Aに関し、前述の実施の形態1で説明したような画質補正を施す(ステップT9)。その後、制御部108に画像補正処理終了信号を送る。
次に制御部108は指紋登録部206に対し指紋登録開始信号を送り、指紋登録終了信号を受信するまで待機する。指紋登録部206はメモリ102の画像Aより図14(b)に示されるような予め定められた位置の部分領域(隣接部分領域)R1,R2,…,Rnのデータを抽出して(ステップT10)、順次登録データ記憶部202の所定アドレスにそれぞれ格納する(ステップT11)。その後、指紋登録部206は制御部108に指紋登録終了信号を送る。以上で画像Aから、照合に用いる部分領域(隣接部分領域)Riを抽出して登録画像Aとして記憶する登録処理は終了する。
本実施の形態において、画像補正部104、指紋登録部206、登録データ読出部207、最大一致度位置探索部105、類似度計算部106、照合判定部107および制御部108のすべてあるいは一部は処理手順を記憶させたメモリ624などに相当のROMとそれを実行するためのCPU622などの演算処理装置を用いて構成してもよい。
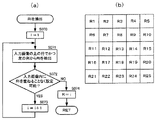
図14(a)は、図13のT10に示したRiを抽出するサブルーチンプログラムを示すフローチャートである。まず、ステップS070により、iの初期値を「1」に設定する処理がなされる。次にステップS071により、入力画像上の上の行でかつ左の列から隣接部分領域Riを抽出する処理がなされる。次にステップS072により、入力画像内に隣接部分領域Riを重ねることなく設定可能であるか否かの判断がなされ、未だに重ねることなく設定できるエリアが残存する場合には、制御がステップS073へ進み、iの値を「1」加算する処理がなされてステップS071へ戻る。
ステップS072によりNOの判断がなされるまでステップS071〜ステップS073の処理が繰返し実行される。その結果、図14(b)に示すように、入力画像の一番上の行の左端から右端に向かって隣接部分領域R1、R2、…が設定され、その行における右端の隣接部分領域R5を設定した後次の行に移行して左端から右端に向かって隣接部分領域R6、R7、…R10が設定される。このような設定が繰返し実行されて最後の隣接部分領域R25が設定された段階で、ステップS072によりNOの判断がなされることとなる。ステップS072によりNOの判断がなされると、ステップS074により、Kの値に現在のiに値をセットする処理がなされる。その結果、入力画像全体に重なることなく隣接部分領域を隣接させて設定した場合のその隣接部分領域の総数が、Kの値となる。
第2に画像Bを入力画像として登録データと照合を行なう照合処理のフローチャートは、図3と同じである。また、類似度計算のフローチャートは、図4と同じである。
図15(a)は、実施の形態3における部分領域Riのテンプレート設定のサブルーチンプログラムを示すフローチャートである。まずステップS081により、現在のiの値が前述のステップS074により設定されたKの値未満であるか否かの判断がなされる。未満の場合には未だ境目包含部分領域の画像データを用いないときであり、制御がステップS082へ進み、登録データ記憶部202に登録されている隣接部分領域Riの画像データを読出す処理がなされる。この読出された画像データによるテンプレートマッチング処理が実行される(ステップS005〜S007参照)。
一方、現在のiの値がKの値を越えている場合には境目包含部分領域の画像データを用いてテンプレートマッチングを行なうときであり、ステップS081によりNOの判断がなされて制御がステップS083へ進み、e=i−K+1の演算処理がなされる。次に、ステップS084により、Reを左上とする4つの隣接部分領域が存在するか否かの判断がなされる。eの値は、iの値が増加する毎に、1、2、3、…というように、1ずつ増加する。したがって、eの最初の値が「1」であるために、ステップS084の最初の実行に際しては、R1を左上とする4つの隣接部分領域が存在するか否かの判断がなされることとなる。図14(b)を参照し、R1は入力画像の左上端の部分領域であり、このR1を左上とする4つの隣接部分領域は、R1とR2とR6とR7とになる。その結果、ステップS084によりYESの判断がなされてステップS085に制御が進む。図14(b)に示す各隣接部分領域Riは、図15(b)に示すように、分割領域1、分割領域2、分割領域3、分割領域4の4つの分割領域の画像データで構成されている。そして、ステップS085により、たとえばeの値が「1」のときには、R1の分割領域1のデータと右上の部分領域R2の分割領域2のデータと左下の部分領域R6の分割領域3のデータと右下の部分領域R7の分割領域4のデータとを寄せ集めてそれを部分領域Riの画像データとする処理がなされる。すなわち、図14(b)を参照して、R1、R2、R6、R7の4つの隣接部分領域における境目の交点を中心とする境目包含部分領域の画像データが生成されることとなる。
次にステップS086により、dの値に「1」を加算する処理がなされる。
図14(b)を参照して、たとえばR5、R10、R15、R20、R21〜R25の9個の部分領域に関しては、その部分領域を左上とする4つの隣接部分領域は存在しない。そのような部分領域に関しては、ステップS084によりNOの判断がなされ、ステップS085、ステップS086の処理が行なわれない。その結果、dの値は、境目包含部分領域の個数と一致する。
次に制御がステップS087へ進み、eの値がKの値に一致したか否かの判断がなされ、未だ一致しない場合にはこのサブルーチンプログラムが終了する。
iの値が「1」加算更新される毎に(ステップS008参照)、ステップS083〜ステップS087の制御が繰返し実行され、iの値が2Kすなわちeの値がKに達した段階で、ステップS087によりYESの判断がなされて制御がステップS088へ進み、n=K+dにする処理がなされる。その結果、nの値は、入力画像内に設定された重なることのない隣接部分領域の数とステップS085により生成された境目包含部分領域に相当する画像データの数との合計値となる。次にステップS089により、dの値を「0」の値にクリアし、ステップS090により、テンプレート設定管理フラグをONにする処理がなされる。
[実施の形態4]
この実施の形態4は、実施の形態3で説明した二重重ね部分領域に相当する画像データの生成制御を実施の形態2に適用したものである。
この実施の形態4は、実施の形態3で説明した二重重ね部分領域に相当する画像データの生成制御を実施の形態2に適用したものである。
この実施の形態4では、画像照合装置のブロック図は図12と同じであり、画像登録処理は図13と同じであり、照合処理は図3と同じである。実施の形態4独自の内容としては、図13のT10に示したRiを抽出する処理の具体的内容と、部分領域Riのテンプレート設定処理のサブルーチンプログラムの具体的内容とである。
図16(a)を参照して、Riを抽出するサブルーチンプログラムの内容を説明する。ステップS100により、iを「1」に初期設定する。次にステップS101により、入力画像の中心を算出する処理がなされる。次にステップS102により、算出された中心に近い位置から隣接部分領域Riを抽出する処理がなされる。次にステップS103により、入力画像内に隣接部分領域Riを重ねることなく設定可能であるか否かの判断がなされ、隣接部分領域を設定できる残りエリアが存在する場合には、制御がステップS104へ進み、iを「1」加算更新してステップS102へ戻る。
このステップS102〜S104のループを繰返し巡回してその都度iが「1」ずつ加算更新され、入力画像内に隣接部分領域Riを重ねることなく設定し尽くした段階で、制御がステップS105へ進み、そのときのiの値をKに設定する処理がなされてこのサブルーチンプログラムが終了する。
ステップS102による中心から近い位置から隣接部分領域Riを抽出するために、図16(b)に示すような、隣接部分領域となる。すなわち、入力画像内に5行×5列のマトリックス状に隣接部分領域が設定されるが、上から3行目でかつ左から3列目の中央の画像位置にまず隣接部分領域R1が設定される。その次に、その上にR2が設定され、次にR1の下にR3が設定され、次にR1の左側にR4が設定され、次にR1の右側にR5が設定される。このようにして、中心から段々と周辺に向かって、隣接部分領域Rが設定されて最後の隣接部分領域R25が右下隅に設定されることとなる。
この図16(b)の場合には、隣接部分領域が合計25個設定されることとなり、その結果、ステップS105により設定されたKの値は「25」となる。すなわち、Kは、入力画像内に重なることなく隣接部分領域を敷き詰めた場合のその隣接部分領域の総数の値となる。
図17は、部分領域Riのテンプレート設定処理のサブルーチンプログラムを示すフローチャートである。まずステップS110により、現在のiの値がステップS105により設定されたKの値未満であるか否かの判断がなされる。未満の場合には未だ隣接部分領域の画像を用いての照合を行なう段階であるために、登録データ記憶部202に記憶されている隣接部分領域Riを読出す処理がなされる。
現在のiの値がK以上となった場合には、境目包含部分領域の画像を用いる段階であるために、制御がステップS112に進み、現在のiとKとの値がイコールであるか否かの判断がなされる。イコールの場合すなわち境目包含部分領域を用いるようになって最初の段階の場合には、ステップS113により、入力画像の中心を算出する処理がなされる。次に制御がステップS114へ進み、現在のiがn以下であるか否かの判断がなされる。このnは、前述のステップS046と同じものであり、照合に用いる部分領域の合計の値であり、予め定められた値である。このnの値は、入力画像全体に隣接部分領域を重なることなく設置した場合のその隣接部分領域の総数(図16(b)の場合には「25」)よりも大きくかつその隣接部分領域全体に境目包含部分領域を敷き詰めた場合の部分領域の合計数よりも小さい値に設定されている。
現在のiの値がn以下である場合には、ステップS115により、e=i−K+1が算出され、隣接部分領域Reを左上とする4つの隣接部分領域が存在するか否かの判断がなされる。存在する場合にはステップS117により、隣接部分領域Reの分割領域1のデータと左上の部分領域の分割領域2のデータと左下の部分領域の分割領域3のデータと右下の部分領域の分割領域4のデータとを寄せ集めてそれを境目包含部分領域Riの画像データを生成する処理がなされる。このステップS116、S117の処理は、前述のステップS084、S085と同じものである。
このステップS114〜S117の処理を、繰返し実行し、その都度iが「1」ずつ加算更新され(ステップS008参照)iの値がnを越えた段階で、ステップS114によりNOの判断がなされて制御がステップS118へ進み、テンプレート設定完了フラグがONにセットされてこのサブルーチンプログラムが終了する。
なお、実施の形態3および実施の形態4では、入力画像から抽出した隣接部分領域の画像データを登録データ記憶部202に登録しておくが、その際に、照合対象となる複数の画像データ(指紋画像データ)毎に、隣接部分領域を登録データ記憶部202に記憶しておくようにしてもよい。このようにする場合には、登録データ記憶部202は、複数分の画像データの隣接部分領域のデータを記憶しなければならないが、照合に必要となる境目包含部分領域のデータは、照合の際に隣接部分領域のデータを用いて生成されるために、登録データ記憶部202は境目包含部分領域のデータまで記憶する必要がなく、登録データ記憶部202の記憶容量の増加を極力抑えることができるという利点がある。
[実施の形態5]
以上説明した画像照合のための処理機能は、プログラムで実現される。本実施の形態では、このプログラムはコンピュータで読取可能な記録媒体に格納される。
以上説明した画像照合のための処理機能は、プログラムで実現される。本実施の形態では、このプログラムはコンピュータで読取可能な記録媒体に格納される。
本実施の形態では、この記録媒体として、図2に示されているコンピュータで処理が行なわれるために必要なメモリ、たとえばメモリ624のようなそのものがプログラムメディアであってもよいし、また該コンピュータの外部記憶装置に着脱自在に装着されて、そこに記録されたプログラムが該外部記憶装置を介して読取り可能な記録媒体であってもよい。このような外部記憶装置としては、磁気テープ装置(図示せず)、FD駆動装置630およびCD−ROM駆動装置640などであり、該記録媒体としては磁気テープ(図示せず)、FD632およびCD−ROM642などである。いずれの場合においても、各記録媒体に記録されているプログラムはCPU622がアクセスして実行させる構成であってもよいし、あるいはいずれの場合もプログラムが該記録媒体から一旦読出されて図2の所定のプログラム記憶エリア、たとえばメモリ624のプログラム記憶エリアにロードされて、CPU624により読出されて実行される方式であってもよい。このロード用のプログラムは、予め当該コンピュータに格納されているものとする。
ここで、上述の記録媒体はコンピュータ本体と分離可能に構成される。このような記録媒体としては、固定的にプログラムを担持する媒体が適用可能である。具体的には、磁気テープやカセットテープなどのテープ系、FD632や固定ディスク626などの磁気ディスク、CD−ROM642/MO(Magnetic Optical Disc)/MD(Mini Disc)/DVD(Digital Versatile Disc)などの光ディスクのディスク系、ICカード(メモリカードを含む)/光カードなどのカード系、マスクROM、EPROM(Erasable and Programmable ROM)、EEPROM(Electrically EPROM)、フラッシュROMなどによる半導体メモリが適用可能である。
また、図2のコンピュータはインターネットを含む通信ネットワーク300と通信接続可能な構成が採用されているから、通信ネットワーク300からプログラムがダウンロードされて流動的にプログラムを担持する記録媒体であってもよい。なお、通信ネットワーク300からプログラムがダウンロードされる場合には、ダウンロード用プログラムは予め当該コンピュータ本体に格納されていてもよく、あるいは別の記録媒体から予め当該コンピュータ本体にインストールされてもよい。
なお記録媒体に格納されている内容としてはプログラムに限定されず、データであってもよい。
以上説明した実施の形態1〜実施の形態5では、たとえば、図6(b)のようなセンサ面積が小さい場合であっても、例えば、図6(b)のように部分領域を設定することにより、部分領域の数を増やし、ひいては精度を向上させることができる。
さらに、例えば、図7(a)と図7(b)の画像を照合する際、図7(a)のE1,EE2,E3のように重なりのある部分領域を設定する。部分領域E1,E2,E3の最大一致位置を図7(b)中で探索を行うと、それぞれE1b,E2b,E3bのような位置になり、従来技術に比べて移動ベクトルの差が大きくなり、異なる画像であると検出することが容易になる。
今回開示された実施の形態はすべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
1,2 画像照合装置、101 画像入力部、102 メモリ、103 バス、104 画像補正部、105 最大一致度位置探索部、106 移動ベクトルに基づく類似度計算部、107 照合判定部、108 制御部、202 登録データ記憶部、206 指紋登録部、207 登録データ読出部。
Claims (11)
- 第1の画像と第2の画像とを照合する画像照合装置であって、
テンプレートマッチングに用いるための部分領域を複数前記第1の画像内に設定する部分領域設定手段と、
該部分領域設定手段により設定された複数部分領域の画像のそれぞれに対応して、前記第2の画像において最大の一致度となる部分領域の前記第2の画像内での位置である最大一致度位置を探索する最大一致度位置探索手段と、
前記第1の画像内での前記部分領域の位置と、当該部分領域に対応の前記最大一致度位置との、位置関係を示す位置関係量であって、前記複数部分領域毎の位置関係量のうち、該位置関係量が所定レンジに該当する前記部分領域に関する情報から前記第1の画像と前記第2の画像との類似度を計算して画像類似度として出力する類似度計算手段と、
該類似度計算手段により出力された前記画像類似度に基づいて前記第1の画像と前記第2の画像とが一致するか否か判定する判定手段とを備え、
前記部分領域設定手段は、
前記第1の画像内に互いに重複しない状態で隣接する複数の隣接部分領域を設定する隣接部分領域設定手段と、
該隣接部分領域設定手段により設定された前記隣接部分領域上でかつ該隣接部分領域の境目を含む位置に境目包含部分領域を設定する境目包含部分領域設定手段とを含み、
前記隣接部分領域と前記境目包含部分領域とを、前記複数部分領域として設定する、画像照合装置。 - 第1の画像と第2の画像とを照合する画像照合装置であって、
前記第1の画像内に複数設定されたテンプレートマッチングに用いる部分領域の画像データであって、互いに重複しない状態で隣接する複数の隣接部分領域の画像データを記憶する部分領域画像データ記憶手段と、
互いに隣接する前記隣接部分領域同士の境目を含む境目包含部分領域の画像データを生成する手段であって、前記部分領域画像データ記憶手段に記憶されている互いに隣接する前記隣接部分領域同士の画像データのうち前記境目包含部分領域が重なる部分の画像データを寄せ集めて当該境目包含部分領域の画像データを生成する境目包含部分領域画像データ生成手段と、
前記第2の画像を入力する画像入力手段と、
前記部分領域画像データ記憶手段が記憶している複数の隣接部分領域の画像データからなる画像と前記境目包含部分領域画像データ生成手段が生成した前記境目包含部分領域の画像データからなる画像とを含む複数部分領域の画像のそれぞれに対応して、前記画像入力手段により入力された前記第2の画像において最大の一致度となる部分領域の前記第2の画像内での位置である最大一致度位置を探索する最大一致度位置探索手段と、
前記第1の画像内での前記部分領域の位置と、当該部分領域に対応する前記最大一致度位置との、位置関係を示す位置関係量であって、前記複数部分領域毎の位置関係量のうち、該位置関係量が所定レンジに該当する前記部分領域に関する情報から前記第1の画像と前記第2の画像との類似度を計算して画像類似度として出力する類似度計算手段と、
該類似度計算手段により出力された前記画像類似度に基づいて前記第1の画像と前記第2の画像とが一致するか否か判定する判定手段とを備えている、画像照合装置。 - 前記複数部分領域は、全て同型の矩形の部分領域であり、
前記隣接部分領域は、前記第1の画像内全体に敷き詰められた状態で設定され、
前記境目包含部分領域は、互いに隣接する4個の隣接部分領域により形成される境目の交点を包含する、請求項1または2に記載の画像照合装置。 - 前記境目包含部分領域は、全隣接部分領域の内画像の特徴がよく表れる隣接部分領域同士の境目を包含する個所に限定された部分領域である、請求項1〜3のいずれかに記載の画像照合装置。
- 前記類似度計算手段は、前記画像の特徴がよく表れる個所に限定された前記境目包含部分領域における類似度計算に際しての重付けを他の部分領域に比べて大きくして前記類似度を計算する、請求項4に記載の画像照合装置。
- 前記第1の画像と前記第2の画像とが、生体に由来する画像である、請求項1〜5のいずれかに記載の画像照合装置。
- 前記生体に由来する画像が、指紋に由来する画像である、請求項6に記載の画像照合装置。
- 第1の画像と第2の画像とを照合する画像照合方法であって、
テンプレートマッチングに用いるための部分領域を複数前記第1の画像内に設定する部分領域設定ステップと、
該部分領域設定ステップにより設定された複数の部分領域の画像のそれぞれに対応して、前記第2の画像において最大の一致度となる部分領域の前記第2の画像内での位置である最大一致度位置を探索する最大一致度位置探索ステップと、
前記第1の画像内での前記部分領域の位置と、当該部分領域に対応の前記最大一致度位置との、位置関係を示す位置関係量であって、前記複数部分領域毎の位置関係量のうち、該位置関係量が所定レンジに該当する前記部分領域に関する情報から前記第1の画像と前記第2の画像との類似度を計算して画像類似度として出力する類似度計算ステップと、
該類似度計算ステップにより出力された前記画像類似度に基づいて前記第1の画像と前記第2の画像とが一致するか否か判定する判定ステップとを備え、
前記部分領域設定ステップは、前記第1の画像内に設定された互いに隣接する部分領域の境目を含む部分領域として該隣接する部分領域上に重ねて重複部分領域を設定する重複部分領域設定ステップを含む、画像照合方法。 - 第1の画像と第2の画像とを照合する画像照合方法であって、
前記第1の画像内に複数設定されたテンプレートマッチングに用いる部分領域の画像データであって、互いに重複しない状態で隣接する複数の隣接部分領域の画像データを記憶する部分領域画像データ記憶ステップと、
互いに隣接する前記隣接部分領域同士の境目を含む境目包含部分領域の画像データを生成するステップであって、前記部分領域画像データ記憶ステップにより記憶された互いに隣接する前記隣接部分領域同士の画像データのうち前記境目包含部分領域が重なる部分の画像データを寄せ集めて当該境目包含部分領域の画像データを生成する境目包含部分領域画像データ生成ステップと、
前記第2の画像を入力する画像入力ステップと、
前記部分領域画像データ記憶ステップにより記憶した複数の隣接部分領域の画像データからなる画像と前記境目包含部分領域画像データ生成ステップにより生成された前記境目包含部分領域の画像データからなる画像とを含む複数部分領域の画像のそれぞれに対応して、前記画像入力ステップにより入力された前記第2の画像において最大の一致度となる部分領域の前記第2の画像内での位置である最大一致度位置を探索する最大一致度位置探索ステップと、
前記第1の画像内での前記部分領域の位置と、当該部分領域に対応する前記最大一致度位置との、位置関係を示す位置関係量であって、前記複数部分領域毎の位置関係量のうち、該位置関係量が所定レンジに該当する前記部分領域に関する情報から前記第1の画像と前記第2の画像との類似度を計算して画像類似度として出力する類似度計算ステップと、
該類似度計算ステップにより出力された前記画像類似度に基づいて前記第1の画像と前記第2の画像とが一致するか否か判定する判定ステップとを備えている、画像照合方法。 - 請求項8または9に記載の画像照合方法をコンピュータに実行させるための画像照合プログラム。
- 請求項10に記載の画像照合プログラムを記録したコンピュータ読取り可能な記録媒体。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004250345A JP2006065764A (ja) | 2004-08-30 | 2004-08-30 | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 |
| US11/212,710 US20060045350A1 (en) | 2004-08-30 | 2005-08-29 | Apparatus, method and program performing image collation with similarity score as well as machine readable recording medium recording the program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004250345A JP2006065764A (ja) | 2004-08-30 | 2004-08-30 | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2006065764A true JP2006065764A (ja) | 2006-03-09 |
Family
ID=35943139
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004250345A Pending JP2006065764A (ja) | 2004-08-30 | 2004-08-30 | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20060045350A1 (ja) |
| JP (1) | JP2006065764A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007148677A (ja) * | 2005-11-25 | 2007-06-14 | Canon Inc | 画像処理装置、画像処理方法 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7668405B2 (en) * | 2006-04-07 | 2010-02-23 | Eastman Kodak Company | Forming connections between image collections |
| CN101173853B (zh) * | 2006-11-01 | 2011-02-02 | 鸿富锦精密工业(深圳)有限公司 | 定位测量装置及方法 |
| EP2495687B1 (en) * | 2011-03-02 | 2018-12-05 | Precise Biometrics AB | Method of matching, biometric matching apparatus, and computer program |
| JP5708278B2 (ja) * | 2011-06-08 | 2015-04-30 | ソニー株式会社 | 情報処理装置および情報処理方法 |
| EP2884459A4 (en) * | 2012-08-10 | 2016-03-30 | Konica Minolta Inc | PICTURE PROCESSING DEVICE, PICTURE PROCESSING METHOD AND PICTURE PROCESSING PROGRAM |
| EP3172696A1 (en) * | 2014-07-25 | 2017-05-31 | Qualcomm Incorporated | Enrollment and authentication on a mobile device |
| CN105205439B (zh) * | 2015-02-13 | 2017-05-03 | 比亚迪股份有限公司 | 指纹重叠区域面积的计算方法及电子装置 |
| CN106980820A (zh) * | 2017-03-10 | 2017-07-25 | 惠州Tcl移动通信有限公司 | 一种基于指纹相似度振动提示的方法及系统 |
| US11038878B2 (en) * | 2019-03-14 | 2021-06-15 | Hector Hoyos | Computer system security using a biometric authentication gateway for user service access with a divided and distributed private encryption key |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5067162A (en) * | 1986-06-30 | 1991-11-19 | Identix Incorporated | Method and apparatus for verifying identity using image correlation |
| US5909501A (en) * | 1996-09-09 | 1999-06-01 | Arete Associates | Systems and methods with identity verification by comparison and interpretation of skin patterns such as fingerprints |
| JP2002358524A (ja) * | 2001-05-31 | 2002-12-13 | Sony Corp | 指紋照合装置及び指紋照合方法 |
-
2004
- 2004-08-30 JP JP2004250345A patent/JP2006065764A/ja active Pending
-
2005
- 2005-08-29 US US11/212,710 patent/US20060045350A1/en not_active Abandoned
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007148677A (ja) * | 2005-11-25 | 2007-06-14 | Canon Inc | 画像処理装置、画像処理方法 |
| JP4757001B2 (ja) * | 2005-11-25 | 2011-08-24 | キヤノン株式会社 | 画像処理装置、画像処理方法 |
| US8077976B2 (en) | 2005-11-25 | 2011-12-13 | Canon Kabushiki Kaisha | Image search apparatus and image search method |
Also Published As
| Publication number | Publication date |
|---|---|
| US20060045350A1 (en) | 2006-03-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007094862A (ja) | 情報生成装置、情報生成方法、情報生成プログラムおよび機械読取り可能な記録媒体 | |
| AU2012200238B2 (en) | Methods and Systems of Authentication | |
| CN107958443B (zh) | 一种基于脊线特征和tps形变模型的指纹图像拼接方法 | |
| JP5487970B2 (ja) | 特徴点配置照合装置及び画像照合装置、その方法及びプログラム | |
| Deng et al. | Retinal fundus image registration via vascular structure graph matching | |
| JP2006293949A (ja) | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 | |
| US20060117188A1 (en) | Biometric print quality assurance | |
| JP2001351103A (ja) | 画像照合装置、画像照合方法及び画像照合プログラムを記録した記録媒体 | |
| EP1825374B1 (en) | Biometric print quality assurance | |
| US7697733B2 (en) | Image collating apparatus, image collating method, image collating program product, and computer readable recording medium recording image collating program product | |
| JP7289927B2 (ja) | 二次元コードの認識方法、生成方法、装置、二次元コード及び小車 | |
| US20060045350A1 (en) | Apparatus, method and program performing image collation with similarity score as well as machine readable recording medium recording the program | |
| JP2007213502A (ja) | 情報処理装置、認証方法、認証プログラム、および認証プログラムを記録した記録媒体 | |
| JP2007316740A (ja) | 情報処理装置、情報処理方法、プログラムおよびプログラムを記録したコンピュータ読取り可能な記録媒体 | |
| JP2007323500A (ja) | 情報処理装置、方法、プログラムおよびプログラムを記録したコンピュータ読取り可能な記録媒体 | |
| JP2007323432A (ja) | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 | |
| JP2007034505A (ja) | 認証装置、認証方法、認証用プログラム、および、コンピュータ読取り可能な記録媒体 | |
| JP2003323618A (ja) | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 | |
| JP2006018677A (ja) | 生体データ照合装置、生体データ照合方法、生体データ照合プログラムおよび生体データ照合プログラムを記録したコンピュータ読取り可能な記録媒体 | |
| KR20100038190A (ko) | 등록장치, 조합장치, 데이터구조 및 기억매체 | |
| JP2005284792A (ja) | 画像照合装置、画像照合方法、画像照合プログラムおよび画像照合プログラムを記録したコンピュータ読取り可能な記録媒体 | |
| JP2005284731A (ja) | 画像照合装置、画像照合方法、画像照合プログラム、および画像照合プログラムを記録したコンピュータ読取可能な記録媒体 | |
| JP4531670B2 (ja) | パターン照合装置 | |
| JP2006018676A (ja) | 生体データ照合装置、生体データ照合方法、生体データ照合プログラムおよび生体データ照合プログラムを記録したコンピュータ読取り可能な記録媒体 | |
| JP2005209107A (ja) | 画像照合装置、画像照合方法、画像照合プログラム、および画像照合プログラムを記録したコンピュータ読取可能な記録媒体 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081008 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20081014 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20090224 |