JP2005181237A - レーダ装置 - Google Patents
レーダ装置 Download PDFInfo
- Publication number
- JP2005181237A JP2005181237A JP2003426104A JP2003426104A JP2005181237A JP 2005181237 A JP2005181237 A JP 2005181237A JP 2003426104 A JP2003426104 A JP 2003426104A JP 2003426104 A JP2003426104 A JP 2003426104A JP 2005181237 A JP2005181237 A JP 2005181237A
- Authority
- JP
- Japan
- Prior art keywords
- radar
- target
- angle
- monopulse
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Landscapes
- Optical Radar Systems And Details Thereof (AREA)
- Radar Systems Or Details Thereof (AREA)
Abstract
【課題】
モノパルスレーダ装置はアンテナやアンプを使用するため、温度特性や経時変化によりゲインが変化し、和信号,差信号の大きさが変化する。このため実際の和信号と差信号の比率の特性と、記憶されている特性との間にずれが生じ、ターゲットの方位角度の検知制度が低下する。
【解決手段】
従来のモノパルスレーダに、少なくとも距離検知可能な狭角ビームを持つレーダを組み合わせることにより、角度特性のずれを補正し、方位角度の検知精度低下を抑制することが出来る。
【選択図】図1
モノパルスレーダ装置はアンテナやアンプを使用するため、温度特性や経時変化によりゲインが変化し、和信号,差信号の大きさが変化する。このため実際の和信号と差信号の比率の特性と、記憶されている特性との間にずれが生じ、ターゲットの方位角度の検知制度が低下する。
【解決手段】
従来のモノパルスレーダに、少なくとも距離検知可能な狭角ビームを持つレーダを組み合わせることにより、角度特性のずれを補正し、方位角度の検知精度低下を抑制することが出来る。
【選択図】図1
Description
本発明は、自車両と先行車もしくは障害物などの物標との距離,相対速度,角度を検出するミリ波レーダ装置に関する。
ミリ波等の電波を用いた電波レーダは、雨,霧等が存在する悪天候でも電波のビームの減衰量が小さく、遠距離まで到達するため、航空管制,気象観測分野で広く用いられてきた。最近では、自動車の予防安全の分野において、先行車との車間距離,相対速度,角度を計測するミリ波レーダが研究開発され、商品化されつつある。その電波レーダの方式にはいくつかあるが、代表的なものの一つとしてモノパルス方式のレーダがある。
モノパルス方式とは、ターゲット(検出対象物)で反射される電波を2つのアンテナで同時に受信し、2つの信号の位相差を検出することでターゲットの方位(角度)を検知する方式であり、機械的な可動部を有することなくターゲットの方位(角度)を検知することが出来るので、レーダの小型化,高信頼化に有効とされている(センサ・アクチュエータ/ウィーク‘99総合シンポジウム 自動車とセンサ技術、3.2方向検出方式、図4)。
センサ・アクチュエータ/ウィーク‘99総合シンポジウム 自動車とセンサ技術
モノパルス方式のレーダ装置では、2つの受信信号の和(以下、和信号と称する)及び2つの受信信号の差(以下、差信号と称する)を導出し、この和信号と差信号の電力の比率を、図8に示すような予め記憶した和信号/差信号の電力比率の特性と比較して先行車の角度を検知する。
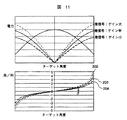
しかしながら、レーダ装置はアンテナやアンプを使用するため、温度特性や経時変化によりゲインが変化し、和信号,差信号の大きさが変化する。例えば、出荷時に記憶した角度テーブルが図11の203であったものが、温度変化によりアンプ118のゲインが変化すると、実際の角度テーブルが202もしくは204に変化する。
このため、実際の和信号と差信号の比率の特性と、記憶されている特性との間にずれが生じ、ターゲットの方位角度の検知制度が低下するという課題があった。
本発明は、以上の事項を考慮してなされたものであり、ターゲット方位角度の検知精度低下を抑制することを目的とする。
モノパルスレーダに、少なくとも距離検知可能なレファレンスレーダを、モノパルスレーダの電波放射方向とレファレンスレーダの信号放射方向が所定の設定角を為すように組み合わせる。
本発明によれば、モノパルスレーダの方位角度の検知精度低下を抑制することが出来る。
以下、添付図面を参照して本発明の実施形態について説明する。
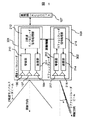
図1は本発明の一実施例を示すブロック図である。まず、本実施例のレーダ装置は大きくモノパルスレーダ部301とリファレンスレーダ部302から構成される。ここでは、モノパルスレーダ部301が2周波CW方式のレーダである場合について説明する。
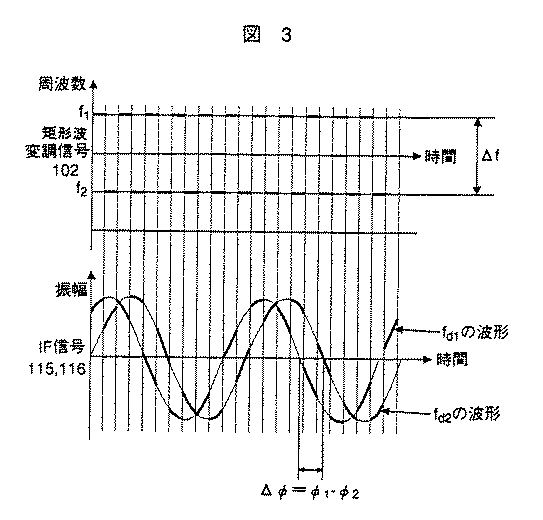
まず、2周波モノパルスレーダ部301の詳細について説明する。図2は2周波モノパルスレーダ部301のブロック図である。ミリ波発振器101は変調信号102を発生する変調器103により変調され、時分割でf1,f2(Δf:f2−f1)の二つの周波数の送信信号を送信アンテナ104から発射する。送信信号は先行車105で反射して受信信号となり、二つの受信アンテナ106,107で受信される。
この時、先行車105と2周波モノパルスレーダ部301間に相対速度Vがある場合、ドップラ周波数fd1,fd2が発生し、受信信号の周波数はf1+fd1,f2+fd2となる。これらの受信信号は加算器109で加算され和(SUM)信号110に、また、減算器
111で減算され差(DIF)信号112に変換される。和信号110及び差信号112がミキサ113,114を通過すると、fd1,fd2のそれぞれの情報を含む、時分割した信号(中間周波数信号115,116(以下IF信号とする))となる。
111で減算され差(DIF)信号112に変換される。和信号110及び差信号112がミキサ113,114を通過すると、fd1,fd2のそれぞれの情報を含む、時分割した信号(中間周波数信号115,116(以下IF信号とする))となる。
和信号と差信号のIF信号115,116はアンプ117,118により増幅された後、変調信号102に同期したスイッチ119,120により和信号,差信号毎に、それぞれ二つのLPF(ローパスフィルタ)121,122の方向に分配される。
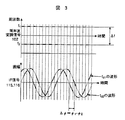
図3に変調信号102とIF信号115,116の関係を示す。LPF121,122を通過したIF信号は、通過する前の時分割したIF信号115,116の包絡線からなる二つの信号となる。この信号が変調周波数f1,f2に対するドップラ信号である。このドップラ信号をADC(A/D変換器)123,124によって離散値化し、DSP
(Digital Signal Processor)125でFFT(Fast Fourier Transform)解析処理すると、ドップラ周波数fd1,fd2と二つのアンテナによる受信信号の位相差φ1−φ2が求まる。
(Digital Signal Processor)125でFFT(Fast Fourier Transform)解析処理すると、ドップラ周波数fd1,fd2と二つのアンテナによる受信信号の位相差φ1−φ2が求まる。
ここで、先行車105との相対速度Vは次式より求めることが出来る。
または
いま、fd1≪f1,fd2≪f2,Δf≪f1の場合、fd1≒fd2となるため、
また、車間距離Rは次式により表すことが出来る。
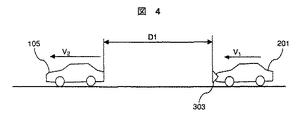
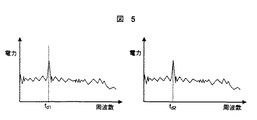
ここで、図4に示すように、自車両201とその前方に先行車105があり、それぞれの走行速度がV1,V2(V1≒V2)である時、相対速度は(V1−V2)となる。この時、相対速度に対するドップラ信号周波数をfd1,fd2とした場合に、その信号をFFT解析した結果を図5に示す。
ここで、fd1≒fd2とすると、図5に示すようにドップラ周波数fd1に対応した周波数軸にスペクトルが現れる。この周波数情報と位相情報から、先行車両の相対速度(V1 −V2 )、及び距離Dを求めることが出来る。そして、求めた相対速度や距離はシステム制御マイコン126により、車両側上位システム127に出力される。
次に、角度検知方式について説明する。図6は二つの受信アンテナ106,107に正面方向から受信信号が入力する場合を示している。ターゲットがレーダの正面にある図6の場合、各受信アンテナに入力される信号は同位相であるため、加算することにより和信号は振幅が元の2倍になり、減算することにより差信号は振幅が0となることがわかる。
これに対し、図7は二つの受信アンテナにある角度から受信信号が入力する場合を示している。ターゲットがレーダに対してある角度を持つ図7の場合、各受信アンテナの信号は逆位相であるため、加算することにより和信号は振幅が0になり、減算することにより差信号は振幅が元の2倍になることがわかる。このように、二つの受信アンテナ106,107で受信する信号はターゲットから反射してくる信号の入力角度により位相差γが生じ、和信号と差信号の電力は、受信信号の入力する角度に対して図8に示すような特性を示す。この特性から、DSP125における和信号及び差信号のFFT解析結果からターゲットの方位角度を検知することができる。
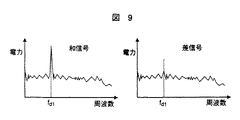
例えば、正面にあるターゲットからの受信信号により得られた和信号,差信号のFFT解析結果を図9に示す。図9では和信号は電力が大きく、差信号は電力が小さくなっている。これらの電力の比率が0であるとき、図8の差/和グラフから、そのターゲットの方位角度は0度と判断される。
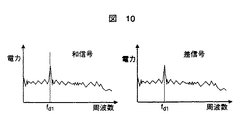
また、正面ではない、ある角度のターゲットからの受信信号により得られた和信号,差信号のFFT解析結果を図10に示す。図10では和信号と差信号は電力がほぼ等しくなっている。例えばこれらの電力の比率が1であるとき、図8の差/和グラフから、そのターゲットの方位角度はβ度と判断される。このように、モノパルス方式のレーダでは和信号と差信号の比率から角度を求めることができる。
和信号と差信号の電力はターゲットの角度に対して、図8に示した特性をもつが、この特性はアンテナ,受信回路等のゲインによって異なる。
例えば203の特性を示すレーダを基準とすると、このレーダよりも差信号のゲインが大きいレーダの場合、その特性は図11の点線202のようになる。これに対し、このレーダよりも差信号のゲインが小さい場合、その特性は図11の破線204のようになる。
このように和信号及び差信号の比率の特性は、アンテナ,受信回路等のゲインによって変化するので、個体差や製造ばらつきが生じる。これらの個体差,製造ばらつきを吸収するため、この特性は各個体毎に図2に示す角度テーブル記憶部128に記憶される。
この2周波モノパルス方式の信号処理は、FFT解析の結果からスペクトルを検出し、1つの先行車両に対して、対応したスペクトルが存在し、その周波数から相対速度、また、位相情報から距離,電力強度から方位角度を同時に求めることが可能であるため、複雑な信号処理を用いることなく、安定した先行車両検知が可能となる利点がある。
図1に戻って、リファレンスレーダ部302は送信部214,送信アンテナ216,受信アンテナ217,受信部213,リファレンスレーダ信号処理部215から構成される。リファレンスレーダ部302は、電波を送受信するものでも、レーザ光を送受信するものでもどちらでも良い。ただし、電波を用いた場合は電波信号に対する気象条件等の影響が2周波モノパルスレーダ部301と同じになるので、後述する角度検出値の補正の際に、それぞれのレーダ部301および302の検出結果が同一距離であるか否かの判定が容易である(図13,S506)。一方レーザを用いた場合は電波に比べて直進性が良いので、レファレンスレーダ部302のビーム幅を狭くすることが容易である。
リファレンスレーダ部302は、少なくともターゲットの距離を検知できるものとし、角度に関しては検知することができる必要はなく、簡便で安価なレーダを使用することができる。
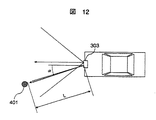
リファレンスレーダ部302は、その電波若しくはレーザの放射方向が2周波モノパルスレーダ部301の電波放射方向と所定の設定角αを為すように取り付けられており、リファレンスレーダ部302の送信する電波もしくはレーザ光は、送信アンテナ216により細く(例えば0.5度 に)絞られている。リファレンスレーダ部302の検知範囲の幅(ビーム幅)はより狭い方が、2周波モノパルスレーダ部の角度検知結果の補正制度が高くなる。ここでリファレンスレーダ部302の電波若しくはレーザの放射方向は、アンテナの向きを変えることで実現できる。
上記によりリファレンスレーダ部302は送信アンテナ216が向けられた規定の角度α方向にのみ電波等(電波,レーザなど)を放射するので、図12に示すように、2周波モノパルスレーダ部301の電波放射方向に対して角度αを為す方向に存在するターゲット401の距離Lを検知することが出来る。
リファレンスレーダ部302のリファレンスレーダ信号処理部215で算出したターゲット401の距離Lは2周波モノパルスレーダ信号処理部212に転送される。
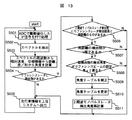
2周波モノパルスレーダ信号処理部212は、リファレンスレーダ信号処理部215からの距離情報に基づき、図13に示すフローに従って、本実施例の特徴である角度テーブル記憶部128の角度テーブルの補正処理を行う。図13に示す補正処理のフローについて以下に説明する。
まず、ステップS501において、ADCで離散値化した和信号と差信号のFFT処理を行う。次にステップS502において、FFT処理結果からターゲットのスペクトルを抽出する。続いてステップS503において距離,相対速度、及び角度を計算し、ステップS504でリファレンスレーダ部302からの距離検知情報があるかを判定する。
ステップS504で距離検知情報がない場合はそのままステップS505に進み、検知したターゲットの情報を上位システムに出力する。ステップS504でリファレンスレーダ部302からの距離検知情報がある場合はステップS506に進む。
ステップS506では、2周波モノパルスレーダ部の信号処理結果にリファレンスレーダ部302の検知距離と同じ距離を示すターゲットが存在するか判定する。
ここで、そのようなターゲットが存在しない場合はステップS505に進み、検知したターゲットの情報を上位システムに出力する。ここで上記のようなターゲットが存在する場合はステップS507に進む。
ステップ507においては、リファレンスレーダ部302と同距離のターゲット数が1個であるか判定する。ここでターゲットが2個以上である場合は、どのターゲットがリファレンスレーダ部302の検出物と同じターゲットであるか判断できないため、補正処理は行わずにステップS505に進む。ここでターゲット1個である場合は、そのターゲットはリファレンスレーダ部302で検出しているターゲットと同じであると判断し、ステップ508に進む。
ステップS508では、ステップ507で2周波モノパルスレーダ部301とリファレンスレーダ部302の双方で検出されていると判断されたターゲットに対し、2周波モノパルスレーダ部301において検出された角度と、リファレンスレーダ部302の設定角α(図12参照)との差(以下、角度差と称する)が、ある規定値(例えば0.5 度)より大きいか判定する。
ここで上記の角度差が規定値より小さい場合は、2周波モノパルスレーダ部301の角度検出結果は正しいものと判断し、補正処理を行うことなくステップS505に進む。ここで上記の角度差が規定値以上である場合は、角度検出値が真値に対してずれているものと判断し、ステップS509において角度テーブル記憶部128に記録された和信号及び差信号の比率特性を補正し、ステップS510で実際に角度テーブル記憶部のデータを更新し、ステップS511で、2周波モノパルスレーダ部301の角度検出結果に対し、再計算を行う。
なお、次の計算ステップから補正,更新後の和信号及び差信号の比率特性を用いることしても良いが、本実施例のように、特性変化を検出したときの検知結果から補正値を用いるようにした方が、検出結果の信頼性が高くなる。
続いて、角度テーブルの補正方法について、図14を使用して説明する。図14の実線601は角度テーブル記憶部128に記憶されている角度テーブルである。今、2周波モノパルスレーダ信号処理部212で計算された差/和がBである時、その値から算出される方位角度値はβとなる。このβの真値がαである時、角度テーブルは実線601から破線602に補正される。そして、この補正した角度テーブル602をステップS510で角度テーブル記憶部128に記憶する。ステップS511では補正した角度テーブルに基づき、2周波モノパルス信号処理部は、ステップS503で算出したターゲットすべてに関して方位角度を再計算する。そして、ステップS505において、再計算した方位角度と距離,相対速度情報を上位システムに出力する。
以上のように本実施例によれば、従来の信号処理の構成に簡易な変更を追加することでターゲットの角度検知の基準となる信号を検出することができるので、モノパルス方式の角度計測結果の誤差を求め補正することができる。よってモノパルス方式のレーダ装置の角度検知精度を向上することができる。
最後に、本発明の好適な実施形態を列挙する。
車両前方に設置され、前方車両もしくは障害物などの物標との距離,相対速度,角度を計測するミリ波レーダ装置において、角度検知方法の異なる2種類のレーダをそなえ、その一方のレーダの角度計測結果を基準として、他方の角度計測結果を補正することを特徴とするミリ波レーダ装置。
車両前方に設置され、前方車両もしくは障害物などの物標との距離,相対速度,角度を計測するミリ波レーダ装置において、角度検知方法がモノパルス方式のレーダと、角度検知方式がモノパルス方式でないレーダをそなえ、角度検知方式がモノパルス方式でないレーダの角度計測結果を基準として、モノパルス方式の角度計測結果を補正することを特徴とするミリ波レーダ装置を提供する。
車両前方に設置され、前方車両もしくは障害物などの物標との距離,相対速度,角度を計測するミリ波レーダ装置において、角度検知方法がモノパルス方式のレーダと、設定した既知の角度方向に狭角のビームを送受信することで、該設定角度に存在する物標の距離を検知するレーダをそなえ、狭角ビームを送受信するレーダの該設定を基準として、モノパルス方式の角度計測結果を補正することを特徴とするミリ波レーダ装置。
上記のようなミリ波レーダ装置は、角度補正結果を記憶する記憶手段を備えることが望ましい。
101…ミリ波発振器、102…変調信号、103…変調器、104…送信アンテナ、105…先行車、106,107…受信アンテナ、110…和(SUM)信号、111…減算器、112…差(DIF)信号、113,114…ミキサ、115,116…中間周波数信号、117,118…アンプ、119,120…スイッチ、121,122…LPF(ローパスフィルタ)、123,124…A/D変換器、125…DSP(Digital
Signal Processor) 、126…システム制御マイコン、127…車両側上位システム、
210…2周波モノパルスレーダ受信部、211…2周波モノパルスレーダ送信部、212…2周波モノパルスレーダ信号処理部、213…リファレンスレーダ受信部、214…リファレンスレーダ送信部、215…リファレンスレーダ信号処理部、216…リファレンスレーダ送信アンテナ、217…リファレンスレーダ受信アンテナ、301…2周波モノパルスレーダ部、302…リファレンスレーダ部、401…ターゲット。
Signal Processor) 、126…システム制御マイコン、127…車両側上位システム、
210…2周波モノパルスレーダ受信部、211…2周波モノパルスレーダ送信部、212…2周波モノパルスレーダ信号処理部、213…リファレンスレーダ受信部、214…リファレンスレーダ送信部、215…リファレンスレーダ信号処理部、216…リファレンスレーダ送信アンテナ、217…リファレンスレーダ受信アンテナ、301…2周波モノパルスレーダ部、302…リファレンスレーダ部、401…ターゲット。
Claims (9)
- 前方に電波を放射する送信部と、ターゲットによる反射波を受信する2以上の受信アンテナとを備え、少なくともターゲットとの距離及び角度を検出するモノパルスレーダ部と、
少なくともターゲットとの距離を検出するリファレンスレーダ部とを備え、
前記リファレンスレーダ部の信号放射方向が、前記モノパルスレーダ部の電波放射方向と所定の角度を為すことを特徴とするレーダ装置。 - 前方に電波を放射する送信部と、ターゲットによる反射波を受信する2以上の受信アンテナとを備え、少なくともターゲットとの距離及び角度を検出するモノパルスレーダ部と、
少なくともターゲットとの距離を検出するリファレンスレーダ部とを備え、
少なくともターゲットとの距離を検出するリファレンスレーダを、その電波放射方向が前記モノパルスレーダの電波放射方向と所定の設定角を為すように配置し、
前記モノパルスレーダが検知したターゲットの角度と前記設定角との差が所定以上である場合は、前記モノパルスレーダの角度検出結果を補正することを特徴とするレーダ装置。 - 請求項1または2において、前記モノパルスレーダ部は2周波CW方式でターゲットとの距離及び相対速度を検出することを特徴とするレーダ装置。
- 請求項1または2において、前記レファレンスレーダ部はレーザレーダであることを特徴とするレーダ装置。
- 請求項1または2において、前記レファレンスレーダ部は電波式レーダであることを特徴とするレーダ装置。
- 請求項1または2において、前記リファレンスレーダ部のビーム幅は0.5 度以下であることを特徴とするレーダ装置。
- 請求項1または2において、前記モノパルスレーダの角度補正結果を記憶する記憶手段を有することを特徴とするレーダ装置。
- 前方に電波を放射する送信部と、ターゲットによる反射波を受信する2以上の受信アンテナとを備え、少なくともターゲットとの距離及び角度を検出するモノパルスレーダの角度検出結果の補正方法であって、
少なくともターゲットとの距離を検出するリファレンスレーダを、その電波放射方向が前記モノパルスレーダの電波放射方向と所定の設定角を為すように配置し、
前記モノパルスレーダが検知したターゲットの角度と前記設定角との差が所定以上である場合は、前記モノパルスレーダの角度検出結果を補正することを特徴とするモノパルスレーダの角度検出結果補正方法。 - 請求項8において、
前記モノパルスレーダによって検出されたターゲットの中から、前記レファレンスレーダにより検出されたターゲットと略同一の距離を示すターゲットを選出し、該ターゲットが一つの場合に補正を行うことを特徴とするモノパルスレーダの角度検出結果補正方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003426104A JP2005181237A (ja) | 2003-12-24 | 2003-12-24 | レーダ装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003426104A JP2005181237A (ja) | 2003-12-24 | 2003-12-24 | レーダ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005181237A true JP2005181237A (ja) | 2005-07-07 |
Family
ID=34785731
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003426104A Pending JP2005181237A (ja) | 2003-12-24 | 2003-12-24 | レーダ装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005181237A (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007033156A (ja) * | 2005-07-25 | 2007-02-08 | Secom Co Ltd | レーダ装置 |
| CN100412567C (zh) * | 2006-05-11 | 2008-08-20 | 哈尔滨工业大学(威海) | 一维扫描激光雷达汽车防撞系统 |
| JP2012205213A (ja) * | 2011-03-28 | 2012-10-22 | Mitsubishi Electric Corp | 追尾アンテナ装置の調整方法、及び追尾アンテナ装置 |
| RU2600109C1 (ru) * | 2015-04-16 | 2016-10-20 | Акционерное общество "Уральское проектно-конструкторское бюро "Деталь" | Моноимпульсная рлс миллиметрового диапазона |
| CN112834995A (zh) * | 2020-12-30 | 2021-05-25 | 纵目科技(上海)股份有限公司 | 一种车载毫米波雷达角度标定方法、系统及电子设备 |
| CN112924976A (zh) * | 2019-12-08 | 2021-06-08 | 钱仁贵 | 基于超声波雷达的靶标探测法及其装置 |
| CN116047442A (zh) * | 2021-10-27 | 2023-05-02 | 北京万集科技股份有限公司 | 一种检测目标角度的方法、装置及电子设备 |
-
2003
- 2003-12-24 JP JP2003426104A patent/JP2005181237A/ja active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007033156A (ja) * | 2005-07-25 | 2007-02-08 | Secom Co Ltd | レーダ装置 |
| CN100412567C (zh) * | 2006-05-11 | 2008-08-20 | 哈尔滨工业大学(威海) | 一维扫描激光雷达汽车防撞系统 |
| JP2012205213A (ja) * | 2011-03-28 | 2012-10-22 | Mitsubishi Electric Corp | 追尾アンテナ装置の調整方法、及び追尾アンテナ装置 |
| RU2600109C1 (ru) * | 2015-04-16 | 2016-10-20 | Акционерное общество "Уральское проектно-конструкторское бюро "Деталь" | Моноимпульсная рлс миллиметрового диапазона |
| CN112924976A (zh) * | 2019-12-08 | 2021-06-08 | 钱仁贵 | 基于超声波雷达的靶标探测法及其装置 |
| CN112834995A (zh) * | 2020-12-30 | 2021-05-25 | 纵目科技(上海)股份有限公司 | 一种车载毫米波雷达角度标定方法、系统及电子设备 |
| CN112834995B (zh) * | 2020-12-30 | 2024-03-22 | 纵目科技(上海)股份有限公司 | 一种车载毫米波雷达角度标定方法、系统及电子设备 |
| CN116047442A (zh) * | 2021-10-27 | 2023-05-02 | 北京万集科技股份有限公司 | 一种检测目标角度的方法、装置及电子设备 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4007498B2 (ja) | 車載用レーダ装置 | |
| US6204803B1 (en) | Radar apparatus | |
| JPH09502017A (ja) | 自走車両の追跡のためのモノパルス方位レーダシステム | |
| US10823846B2 (en) | Object detection method and object detection device | |
| JP6136524B2 (ja) | レーダ装置、及び検査システム | |
| JP4396436B2 (ja) | 物標検出装置 | |
| WO2020034243A1 (zh) | 一种fmcw雷达距离分辨率和测距范围动态调节的方法 | |
| WO2002099456A1 (en) | Radar device | |
| JP5059717B2 (ja) | モノパルスレーダ装置 | |
| US6040795A (en) | Vehicle-mounted radar apparatus | |
| JP2006010410A (ja) | 物標検出装置 | |
| US7230565B2 (en) | Radar | |
| JP2005181237A (ja) | レーダ装置 | |
| JP3720662B2 (ja) | 車載用レーダ装置 | |
| US6492937B1 (en) | High precision range measurement technique | |
| JPWO2006134911A1 (ja) | レーダ装置 | |
| JP2010175471A (ja) | レーダ装置 | |
| JP3577237B2 (ja) | 車両用レーダ装置 | |
| JP2001194451A (ja) | レーダ装置 | |
| JP3070589B2 (ja) | レーダ装置 | |
| JP4910955B2 (ja) | 車両用レーダ装置 | |
| JP4314262B2 (ja) | 車載用レーダ装置 | |
| JP2003215237A (ja) | 測角レーダ装置 | |
| JPH0915330A (ja) | レーダ装置 | |
| WO2020003759A1 (ja) | 検知装置 |