JP2004336983A - 動力出力装置およびこれを搭載する自動車 - Google Patents
動力出力装置およびこれを搭載する自動車 Download PDFInfo
- Publication number
- JP2004336983A JP2004336983A JP2004036305A JP2004036305A JP2004336983A JP 2004336983 A JP2004336983 A JP 2004336983A JP 2004036305 A JP2004036305 A JP 2004036305A JP 2004036305 A JP2004036305 A JP 2004036305A JP 2004336983 A JP2004336983 A JP 2004336983A
- Authority
- JP
- Japan
- Prior art keywords
- electric machine
- rotating electric
- internal combustion
- combustion engine
- shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000002485 combustion reaction Methods 0.000 claims abstract description 175
- 238000006243 chemical reaction Methods 0.000 claims description 28
- 238000001514 detection method Methods 0.000 claims description 12
- 230000001172 regenerating effect Effects 0.000 claims description 12
- 230000007246 mechanism Effects 0.000 abstract description 24
- 230000005540 biological transmission Effects 0.000 description 31
- 238000000034 method Methods 0.000 description 21
- 230000008569 process Effects 0.000 description 19
- 238000010586 diagram Methods 0.000 description 13
- 230000035939 shock Effects 0.000 description 10
- 239000000446 fuel Substances 0.000 description 9
- 238000002347 injection Methods 0.000 description 6
- 239000007924 injection Substances 0.000 description 6
- 239000000203 mixture Substances 0.000 description 4
- 230000004048 modification Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 4
- 239000007858 starting material Substances 0.000 description 4
- 230000009467 reduction Effects 0.000 description 3
- 238000004891 communication Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000004880 explosion Methods 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 239000004215 Carbon black (E152) Substances 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 230000008859 change Effects 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000002542 deteriorative effect Effects 0.000 description 1
- 230000009699 differential effect Effects 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 229930195733 hydrocarbon Natural products 0.000 description 1
- 150000002430 hydrocarbons Chemical class 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
Images

















Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Abstract
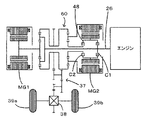
【解決手段】 動力入出力機構30のキャリア34にエンジン22の出力軸を接続し、サンギヤ31にモータMG1の回転軸を接続し、リングギヤ32にモータMG2の回転軸を接続すると共に駆動輪39a,39bを接続する。そして、モータMG3の回転軸をエンジン22の出力軸に一体回転可能に接続する。モータMG1の回転がエンジン22の回転と同一方向のときにはモータMG1で回生された電力がモータMG2に供給される形態としてモータMG1,MG2を運転制御し、モータMG1の回転がエンジン22の回転と逆方向のときにはモータMG3で回生された電力がモータMG1に供給される形態としてモータMG3,MG1を運転制御する。これにより、エネルギ循環が生じるのを回避して装置全体のエネルギ効率を向上することができる。
【選択図】 図1
Description
駆動軸に動力を出力する動力出力装置であって、
内燃機関と、
発電可能な第1の回転電機と、
前記内燃機関の出力軸に接続された第1の軸と前記第1の回転電機の回転軸に接続された第2の軸と前記駆動軸に接続された第3の軸とを有し、これら3つの軸のうちのいずれか2軸に入出力される動力が決定されると残余の1軸に入出力される動力が決定される3軸式の動力入出力手段と、
前記駆動軸に接続された第2の回転電機と、
前記内燃機関の出力軸または前記第1の軸に接続された発電可能な第3の回転電機と、
前記第1の回転電機と前記第2の回転電機と前記第3の回転電機との間で電力をやり取り可能に接続された電力系統と
を備えることを要旨とする。
駆動軸に動力を出力する動力出力装置であって、
内燃機関と、
発電可能な第1の回転電機と、
前記内燃機関の出力軸に接続された第1の軸と前記第1の回転電機に接続された第2の軸と前記駆動軸に接続された第3の軸とを有し、これら3つの軸のうちのいずれか2軸に入出力される動力が決定されると残余の1軸に入出力される動力が決定される3軸式の動力入出力手段と、
第2の回転電機と、
前記第2の回転電機の回転軸と前記内燃機関の出力軸とを接続および接続解除が可能な第1の接続解除手段と、
前記第2の回転電機の回転軸と前記駆動軸とを接続および接続解除が可能な第2の接続解除手段と、
前記第1の回転電機の回転軸の回転状態または前記第1の回転電機の回転軸に接続された第2の軸の回転状態に基づいて前記第1の接続解除手段と前記第2の接続解除手段とを制御する接続制御手段と、
前記内燃機関から出力される動力を前記第1の回転電機と前記第2の回転電機とによりトルク変換することにより要求動力が前記駆動軸に出力されるよう前記内燃機関と前記第1の回転電機と前記第2の回転電機とを運転制御する運転制御手段と、
を備えることを要旨とする。
前記運転制御手段は、前記接続制御手段により前記第1の接続解除手段が接続状態とされると共に前記第2の接続解除手段が接続解除状態とされたとき、前記第2の回転電機の駆動により前記内燃機関をモータリングして始動、または前記内燃機関の運転を停止すると共に前記第2の回転電機により該内燃機関の回転を停止するよう前記内燃機関と前記第2の回転電機とを運転制御する手段であるものとすることもできる。こうすれば、内燃機関を始動する際や停止する際に生じうる車両の振動や駆動軸へのトルクショックを低減したりなくしたりすることができる。
駆動軸に動力を出力する動力出力装置であって、
内燃機関と、
発電可能な第1の回転電機と、
前記内燃機関の出力軸と前記第1の回転電機の回転軸と前記駆動軸との3軸に接続され、該3軸のうちのいずれか2軸に入出力される動力が決定されると残余の1軸に入出力される動力が決定される3軸式の動力入出力手段と、
前記駆動軸に動力を入出力可能な第2の回転電機と、
前記内燃機関の出力軸に動力を入出力可能な第3の回転電機と、
前記駆動軸に要求される要求駆動力に基づいて前記内燃機関が運転すべき動作点を設定する動作点設定手段と、
該設定された動作点と前記第1の回転電機の駆動力制限とに基づいて前記第1の回転電機の目標駆動力と前記第3の回転電機の目標駆動力とを設定すると共に前記要求駆動力に対応する駆動力を前記駆動軸に出力するための前記第2の回転電機の目標駆動力を設定する目標駆動力設定手段と、
前記設定された動作点で前記内燃機関が運転されるよう該内燃機関を運転制御すると共に前記設定された目標駆動力で前記第1の回転電機と前記第2の回転電機と前記第3の回転電機とが運転されるよう該第1の回転電機と該第2の回転電機と該第3の回転電機とを運転制御する運転制御手段と
を備えることを要旨とする。
Nr=(1+ρ)Nc−ρNs …(3)
Nc=(Nr+ρNs)/(1+ρ) …(4)
Tm2*=−(T*−Te*/(1+ρ))/R …(6)
Tm3*=0 …(7)
Tm2*=0 …(9)
Tm3*=T*×(1+ρ)−Te* …(10)
Tm2*=−(T*+Tm1min/ρ)/R …(13)
Tm3*=−Te*−Tm1min・(1+ρ)/ρ …(14)
Claims (27)
- 駆動軸に動力を出力する動力出力装置であって、
内燃機関と、
発電可能な第1の回転電機と、
前記内燃機関の出力軸に接続された第1の軸と前記第1の回転電機の回転軸に接続された第2の軸と前記駆動軸に接続された第3の軸とを有し、これら3つの軸のうちのいずれか2軸に入出力される動力が決定されると残余の1軸に入出力される動力が決定される3軸式の動力入出力手段と、
前記駆動軸に接続された第2の回転電機と、
前記内燃機関の出力軸または前記第1の軸に接続された発電可能な第3の回転電機と、
前記第1の回転電機と前記第2の回転電機と前記第3の回転電機との間で電力をやり取り可能に接続された電力系統と
を備える動力出力装置。 - 請求項1記載の動力出力装置であって、
前記第1の回転電機の回転軸の回転状態または前記第1の回転電機の回転軸に接続された第2の軸の回転状態に基づいて前記内燃機関と前記第1の回転電機と前記第2の回転電機と前記第3の回転電機とを運転制御する運転制御手段を備える
動力出力装置。 - 請求項2記載の動力出力装置であって、
前記運転制御手段は、前記第1の回転電機の回転軸に接続された第2の軸が前記内燃機関の出力軸に接続された第1の軸と同方向に回転するときには、前記内燃機関から出力される動力を前記第1の回転電機と前記第2の回転電機とによりトルク変換することにより要求動力が前記駆動軸に出力されるよう前記内燃機関と前記第1の回転電機と前記第2の回転電機とを運転制御し、前記第1の回転電機の回転軸に接続された第2の軸が前記内燃機関の出力軸に接続された第1の軸と逆方向に回転するときには、前記内燃機関からの動力を前記第3の回転電機と前記第1の回転電機とによりトルク変換することにより要求動力が前記駆動軸に出力されるよう前記内燃機関と前記第1の回転電機と前記第3の回転電機とを運転制御する手段である
動力出力装置。 - 請求項3記載の動力出力装置であって、
前記運転制御手段は、前記第1の回転電機の回転軸に接続された第2の軸が前記内燃機関の出力軸に接続された第1の軸と同方向に回転するときには、前記第1の回転電機を回生運転すると共に回生された電力を用いて前記第2の回転電機を力行運転するよう制御し、前記第1の回転電機の回転軸に接続された第2の軸が前記内燃機関の出力軸に接続された第1の軸と逆方向に回転するときには、前記第3の回転電機を回生運転すると共に回生された電力を用いて前記第1の回転電機を力行運転するよう制御する手段である
動力出力装置。 - 請求項1ないし4いずれか記載の動力出力装置であって、
前記運転制御手段は、前記内燃機関の始動が指示されたとき又は前記内燃機関の停止が指示されたとき、前記第3の回転電機の駆動により該内燃機関をモータリングして始動、または前記内燃機関の運転を停止すると共に前記第3の回転電機により該内燃機関の回転を停止するよう前記内燃機関と前記第3の回転電機とを運転制御する手段である
動力出力装置。 - 請求項5記載の動力出力装置であって、
前記運転制御手段は、要求動力が前記駆動軸に出力されるよう前記第2の回転電機を運転制御する手段である
動力出力装置。 - 請求項1ないし6いずれか記載の動力出力装置であって、
前記第3の回転電機の回転軸は、前記内燃機関の出力軸と一体的に回転するよう接続されてなる
動力出力装置。 - 請求項1ないし6いずれか記載の動力出力装置であって、
前記第3の回転電機の回転軸は、前記内燃機関の出力軸とベルトまたはギヤまたはチェーンを介して接続されてなる
動力出力装置。 - 駆動軸に動力を出力する動力出力装置であって、
内燃機関と、
発電可能な第1の回転電機と、
前記内燃機関の出力軸に接続された第1の軸と前記第1の回転電機に接続された第2の軸と前記駆動軸に接続された第3の軸とを有し、これら3つの軸のうちのいずれか2軸に入出力される動力が決定されると残余の1軸に入出力される動力が決定される3軸式の動力入出力手段と、
第2の回転電機と、
前記第2の回転電機の回転軸と前記内燃機関の出力軸とを接続および接続解除が可能な第1の接続解除手段と、
前記第2の回転電機の回転軸と前記駆動軸とを接続および接続解除が可能な第2の接続解除手段と、
前記第1の回転電機の回転軸の回転状態または前記第1の回転電機の回転軸に接続された第2の軸の回転状態に基づいて前記第1の接続解除手段と前記第2の接続解除手段とを制御する接続制御手段と、
前記内燃機関から出力される動力を前記第1の回転電機と前記第2の回転電機とによりトルク変換することにより要求動力が前記駆動軸に出力されるよう前記内燃機関と前記第1の回転電機と前記第2の回転電機とを運転制御する運転制御手段と、
を備える動力出力装置。 - 請求項9記載の動力出力装置であって、
前記接続制御手段は、前記第1の回転電機の回転軸に接続された第2の軸が前記内燃機関の出力軸に接続された第1の軸と同方向に回転するときには、前記第1の接続解除手段が接続解除状態とされると共に前記第2の接続解除手段が接続状態とされるよう該第1の接続解除手段と該第2の接続解除手段とを駆動制御し、前記第1の回転電機の回転軸に接続された第2の軸が前記内燃機関の出力軸に接続された第1の軸と逆方向に回転するときには、前記第1の接続解除手段が接続状態とされると共に前記第2の接続解除手段が接続解除状態とされるよう該第1の接続解除手段と該第2の接続解除手段とを駆動制御する手段である
動力出力装置。 - 請求項10記載の動力出力装置であって、
前記運転制御手段は、前記第1の回転電機の回転軸に接続された第2の軸が前記内燃機関の出力軸に接続された第1の軸と同方向に回転するときには、前記第1の回転電機を回生運転すると共に回生された電力を用いて前記第2の回転電機を力行運転するよう制御し、前記第1の回転電機の回転軸に接続された第2の軸が前記内燃機関の出力軸に接続された第1の軸と逆方向に回転するときには、前記第2の回転電機を回生運転すると共に回生された電力を用いて前記第1の回転電機を力行運転するよう制御する手段である
動力出力装置。 - 請求項9ないし11いずれか記載の動力出力装置であって、
前記接続制御手段は、前記内燃機関の始動が指示されたとき又は前記内燃機関の停止が指示されたとき、前記第1の接続解除手段が接続状態とされると共に前記第2の接続解除手段が接続解除状態とされるよう該第1の接続解除手段と該第2の接続解除手段とを駆動制御する手段であり、
前記運転制御手段は、前記接続制御手段により前記第1の接続解除手段が接続状態とされると共に前記第2の接続解除手段が接続解除状態とされたとき、前記第2の回転電機の駆動により前記内燃機関をモータリングして始動、または前記内燃機関の運転を停止すると共に前記第2の回転電機により該内燃機関の回転を停止するよう前記内燃機関と前記第2の回転電機とを運転制御する手段である
動力出力装置。 - 請求項1記載の動力出力装置であって、
前記3軸式の動力入出力手段は、ダンパを介して前記内燃機関の出力軸に接続されてなり、
前記第3の回転電機は、前記ダンパを介さずに前記内燃機関の出力軸に接続されてなる 動力出力装置。 - 請求項13記載の動力出力装置であって、
前記内燃機関の回転数を検出する回転数検出手段と、
前記内燃機関の始動が指示されたとき、少なくとも前記回転数検出手段により検出される内燃機関の回転数が所定回転数領域内にあるときには前記第1の回転電機を停止して前記第3の回転電機により該内燃機関がモータリングされるよう前記第1の回転電機と前記第2の回転電機と前記第3の回転電機とを運転制御すると共に該内燃機関が始動するよう該内燃機関を運転制御する始動時運転制御手段と
を備える動力出力装置。 - 前記始動時運転制御手段は、前記内燃機関の始動が指示されたとき、前記第1の回転電機を停止して前記第3の回転電機により前記内燃機関がモータリングされるよう前記第1の回転電機と前記第3の回転電機とを運転制御し、前記回転数検出手段により検出される内燃機関の回転数が前記所定回転数領域を超えたときに前記第3の回転電機を停止して前記第1の回転電機により前記内燃機関がモータリングされて該内燃機関が始動するよう前記第1の回転電機と前記第3の回転電機と前記内燃機関とを運転制御する手段である請求項14記載の動力出力装置。
- 前記始動時運転制御手段は、要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記第2の回転電機を運転制御する手段である請求項14または15記載の動力出力装置。
- 請求項13ないし16いずれか記載の動力出力装置であって、
前記内燃機関の回転数を検出する回転数検出手段と、
前記内燃機関の停止が指示されたとき、該内燃機関の運転が停止するよう該内燃機関を運転制御すると共に少なくとも前記回転数検出手段により検出される内燃機関の回転数が所定回転数領域内にあるときには前記第1の回転電機を停止して前記第3の回転電機により該内燃機関の回転が停止するよう前記第1の回転電機と前記第2の回転電機と前記第3の回転電機とを運転制御する停止時運転制御手段と
を備える動力出力装置。 - 前記停止時運転制御手段は、前記内燃機関の停止が指示されたとき、前記内燃機関の運転が停止するよう該内燃機関を運転制御すると共に前記第1の回転電機により該内燃機関の回転を制動するよう該第1の回転電機を運転制御し、前記回転数検出手段により検出される内燃機関の回転数が所定回転数領域に至ったときに前記第1の回転電機を停止して前記第3の回転電機により該内燃機関の回転を停止するよう前記第1の回転電機と前記第3の回転電機とを運転制御する手段である請求項17記載の動力出力装置。
- 前記停止時運転制御手段は、要求駆動力に対応する駆動力が前記駆動軸に出力されるよう前記第2の回転電機を運転制御する手段である請求項17または18記載の動力出力装置。
- 前記所定回転数領域は、前記内燃機関と前記ダンパと前記第1の回転電機とからなる系に共振現象が生じうる回転数領域を含む領域である請求項15または18記載の動力出力装置。
- 駆動軸に動力を出力する動力出力装置であって、
内燃機関と、
発電可能な第1の回転電機と、
前記内燃機関の出力軸と前記第1の回転電機の回転軸と前記駆動軸との3軸に接続され、該3軸のうちのいずれか2軸に入出力される動力が決定されると残余の1軸に入出力される動力が決定される3軸式の動力入出力手段と、
前記駆動軸に動力を入出力可能な第2の回転電機と、
前記内燃機関の出力軸に動力を入出力可能な第3の回転電機と、
前記駆動軸に要求される要求駆動力に基づいて前記内燃機関が運転すべき動作点を設定する動作点設定手段と、
該設定された動作点と前記第1の回転電機の駆動力制限とに基づいて前記第1の回転電機の目標駆動力と前記第3の回転電機の目標駆動力とを設定すると共に前記要求駆動力に対応する駆動力を前記駆動軸に出力するための前記第2の回転電機の目標駆動力を設定する目標駆動力設定手段と、
前記設定された動作点で前記内燃機関が運転されるよう該内燃機関を運転制御すると共に前記設定された目標駆動力で前記第1の回転電機と前記第2の回転電機と前記第3の回転電機とが運転されるよう該第1の回転電機と該第2の回転電機と該第3の回転電機とを運転制御する運転制御手段と
を備える動力出力装置。 - 請求項21記載の動力出力装置であって、
前記3軸式の動力入出力手段は、前記第1の回転電機で反力を受け持つことにより前記内燃機関から入力される動力を前記駆動軸に出力する手段であり、
前記目標駆動力設定手段は、前記設定された動作点で前記内燃機関を運転したときに前記第1の回転電機で受け持つべき反力が前記第1の回転電機の駆動力制限の範囲内のときには該反力を前記第1の回転電機の目標駆動力として設定すると共に前記第3の回転電機の目標駆動力を値0に設定し、前記設定された動作点で前記内燃機関を運転したときに前記第1の回転電機が受け持つべき反力が前記第1の回転電機の駆動力制限を越えるときには該第1の回転電機で受け持つべき反力が前記第1の回転電機の駆動力制限の範囲内となるよう前記第3の回転電機の目標駆動力を設定すると共に該設定した目標駆動力で前記第3の回転電機を運転したときの前記第1の回転電機で受け持つべき反力を該第1の回転電機の目標駆動力として設定する手段である
動力出力装置。 - 請求項21または22記載の動力出力装置であって、
前記3軸式の動力入出力手段は、ダンパを介して前記内燃機関の出力軸に接続されてなり、
前記第3の回転電機は、前記ダンパを介さずに前記内燃機関の出力軸に接続されてなる 動力出力装置。 - 請求項13ないし20,23いずれか記載の動力出力装置であって、
前記内燃機関と前記3軸式の動力入出力手段と前記第1の回転電機と前記第2の回転電機と前記第3の回転電機は、同軸上に配置されてなり、
前記第3の回転電機は、前記ダンパの外周に同心円上に配置されてなる
動力出力装置。 - 前記第1の回転電機は、前記第3の回転電機に比して高トルク型電動機として構成されてなる請求項13ないし24いずれか記載の動力出力装置。
- 請求項1ないし25いずれか記載の動力出力装置であって、
前記第2の回転電機の回転軸と前記駆動軸との間に介在し、該第2の回転電機の回転軸から入力した動力を変速して該駆動軸に出力する変速手段を備える
動力出力装置。 - 請求項1ないし26いずれか記載の動力出力装置を搭載する自動車。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004036305A JP4100352B2 (ja) | 2003-04-15 | 2004-02-13 | 動力出力装置およびこれを搭載する自動車 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2003110704 | 2003-04-15 | ||
| JP2004036305A JP4100352B2 (ja) | 2003-04-15 | 2004-02-13 | 動力出力装置およびこれを搭載する自動車 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004336983A true JP2004336983A (ja) | 2004-11-25 |
| JP4100352B2 JP4100352B2 (ja) | 2008-06-11 |
Family
ID=33513175
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004036305A Expired - Fee Related JP4100352B2 (ja) | 2003-04-15 | 2004-02-13 | 動力出力装置およびこれを搭載する自動車 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4100352B2 (ja) |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008213824A (ja) * | 2007-02-09 | 2008-09-18 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| US7625307B2 (en) * | 2005-10-21 | 2009-12-01 | Gm Global Technology Operations, Inc. | Mechatronic hybrid transmissions having two planetary gear sets and three motor/generators |
| JP2009286187A (ja) * | 2008-05-27 | 2009-12-10 | Toyota Motor Corp | 車両用動力伝達装置の制御装置 |
| JP2010052497A (ja) * | 2008-08-26 | 2010-03-11 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| JP2010095055A (ja) * | 2008-10-14 | 2010-04-30 | Toyota Motor Corp | 車両用動力伝達装置の制御装置 |
| JP2010195102A (ja) * | 2009-02-23 | 2010-09-09 | Toyota Motor Corp | ハイブリッド車両の駆動装置 |
| WO2011158318A1 (ja) * | 2010-06-14 | 2011-12-22 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| WO2012105042A1 (ja) * | 2011-02-04 | 2012-08-09 | スズキ株式会社 | ハイブリッド車両 |
| JP2014528558A (ja) * | 2011-10-06 | 2014-10-27 | リープヘル−コンポーネンツ ビーベラッハ ゲーエムベーハー | パワースプリット式伝達装置 |
| JP2018043528A (ja) * | 2016-09-12 | 2018-03-22 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
-
2004
- 2004-02-13 JP JP2004036305A patent/JP4100352B2/ja not_active Expired - Fee Related
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7625307B2 (en) * | 2005-10-21 | 2009-12-01 | Gm Global Technology Operations, Inc. | Mechatronic hybrid transmissions having two planetary gear sets and three motor/generators |
| JP2008213824A (ja) * | 2007-02-09 | 2008-09-18 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| JP2009286187A (ja) * | 2008-05-27 | 2009-12-10 | Toyota Motor Corp | 車両用動力伝達装置の制御装置 |
| JP2010052497A (ja) * | 2008-08-26 | 2010-03-11 | Toyota Motor Corp | 車両用駆動装置の制御装置 |
| JP2010095055A (ja) * | 2008-10-14 | 2010-04-30 | Toyota Motor Corp | 車両用動力伝達装置の制御装置 |
| JP2010195102A (ja) * | 2009-02-23 | 2010-09-09 | Toyota Motor Corp | ハイブリッド車両の駆動装置 |
| WO2011158318A1 (ja) * | 2010-06-14 | 2011-12-22 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| CN102947156A (zh) * | 2010-06-14 | 2013-02-27 | 丰田自动车株式会社 | 混合动力车辆的控制装置 |
| JP5360298B2 (ja) * | 2010-06-14 | 2013-12-04 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| WO2012105042A1 (ja) * | 2011-02-04 | 2012-08-09 | スズキ株式会社 | ハイブリッド車両 |
| CN103339002A (zh) * | 2011-02-04 | 2013-10-02 | 铃木株式会社 | 混合动力车辆 |
| JPWO2012105042A1 (ja) * | 2011-02-04 | 2014-07-03 | スズキ株式会社 | ハイブリッド車両 |
| JP2014528558A (ja) * | 2011-10-06 | 2014-10-27 | リープヘル−コンポーネンツ ビーベラッハ ゲーエムベーハー | パワースプリット式伝達装置 |
| JP2018043528A (ja) * | 2016-09-12 | 2018-03-22 | トヨタ自動車株式会社 | ハイブリッド車両の制御装置 |
| US11077841B2 (en) | 2016-09-12 | 2021-08-03 | Toyota Jidosha Kabushiki Kaisha | Control system for hybrid vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4100352B2 (ja) | 2008-06-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4229165B2 (ja) | 車両およびその制御方法 | |
| JP2005295691A (ja) | 動力出力装置およびこれを搭載する自動車 | |
| JP4258508B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP4190490B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御装置,動力出力装置の制御方法 | |
| JP4222332B2 (ja) | ハイブリッド車およびその制御方法 | |
| JP4176080B2 (ja) | 動力伝達装置および動力出力装置並びにこれを搭載する自動車、動力出力装置の制御方法 | |
| JP4100352B2 (ja) | 動力出力装置およびこれを搭載する自動車 | |
| JP3972909B2 (ja) | 動力出力装置およびその制御方法並びにハイブリッド自動車 | |
| JP2005306238A (ja) | 車両用の駆動装置およびこれを備える動力出力装置並びにその制御方法 | |
| JP2007112291A (ja) | 動力出力装置およびこれを搭載する車両並びに動力出力装置の制御方法 | |
| JP4044913B2 (ja) | 動力出力装置およびこれを搭載した自動車並びに動力伝達装置 | |
| JP4458100B2 (ja) | ハイブリッド自動車およびその制御方法 | |
| JP2007261399A (ja) | ハイブリッド車およびその制御方法 | |
| JP4254781B2 (ja) | 車両およびその制御方法 | |
| JP4263709B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 | |
| JP2004056922A (ja) | 動力出力装置およびこれを備える自動車 | |
| JP2009149154A (ja) | 車両およびその制御方法 | |
| JP4005589B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力伝達装置 | |
| JP3901116B2 (ja) | ハイブリッド自動車 | |
| JP4088572B2 (ja) | 動力出力装置およびこれを搭載する自動車 | |
| JP5387460B2 (ja) | 車両およびその制御方法 | |
| JP2007131047A (ja) | ハイブリッド車および駆動装置,ハイブリッドの制御方法 | |
| JP4005587B2 (ja) | 動力出力装置およびこれを搭載する自動車並びに動力伝達装置,動力出力装置の制御方法 | |
| JP2007331559A (ja) | 車両およびその制御方法 | |
| JP2006014387A (ja) | 動力出力装置およびこれを搭載する自動車並びに動力出力装置の制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20061020 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070710 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070830 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20080226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20080310 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110328 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110328 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120328 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120328 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130328 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130328 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140328 Year of fee payment: 6 |
|
| LAPS | Cancellation because of no payment of annual fees |