JP2004237974A - 自転車用変速機のシフト制御装置 - Google Patents
自転車用変速機のシフト制御装置 Download PDFInfo
- Publication number
- JP2004237974A JP2004237974A JP2003364153A JP2003364153A JP2004237974A JP 2004237974 A JP2004237974 A JP 2004237974A JP 2003364153 A JP2003364153 A JP 2003364153A JP 2003364153 A JP2003364153 A JP 2003364153A JP 2004237974 A JP2004237974 A JP 2004237974A
- Authority
- JP
- Japan
- Prior art keywords
- release
- cam
- holding
- claw
- release member
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



































Landscapes
- Lock And Its Accessories (AREA)
- Mechanical Operated Clutches (AREA)
- Gear-Shifting Mechanisms (AREA)
- Mechanical Control Devices (AREA)
Abstract
【課題】 解除部材が解除作動位置付近にあるときの、変速機の変速動作が不安定になるのを防止する。
【解決手段】 このシフト制御装置は、第1位置及び第2位置に移動する回転部材454と、位置保持機構と、解除制御機構とを含む。位置保持機構は、回転部材を第1位置及び第2位置の一方に保持する位置保持位置と、回転部材を他方の位置に向けて移動させることのできる位置解除位置との間を移動する位置保持部材を含む。解除制御機構は、初期位置と解除作動位置(動作範囲終点)との間を移動する解除部材を含み、解除部材が初期位置から解除作動位置に向けて移動すると位置保持部材を位置解除位置に移動させ、解除部材が初期位置に向けて戻り始める前に、または解除作動位置に向けて移動し続けている間に、位置保持部材を位置保持位置に復帰させることができる。
【選択図】 図27A
【解決手段】 このシフト制御装置は、第1位置及び第2位置に移動する回転部材454と、位置保持機構と、解除制御機構とを含む。位置保持機構は、回転部材を第1位置及び第2位置の一方に保持する位置保持位置と、回転部材を他方の位置に向けて移動させることのできる位置解除位置との間を移動する位置保持部材を含む。解除制御機構は、初期位置と解除作動位置(動作範囲終点)との間を移動する解除部材を含み、解除部材が初期位置から解除作動位置に向けて移動すると位置保持部材を位置解除位置に移動させ、解除部材が初期位置に向けて戻り始める前に、または解除作動位置に向けて移動し続けている間に、位置保持部材を位置保持位置に復帰させることができる。
【選択図】 図27A
Description
本発明は、自転車用変速機、より詳しくは、自転車用変速機の変速操作をアシストするためのさまざまな特徴に関する。
自転車変速機を動作させるために、ディレーラ及び内装変速機などのさまざまな装置が開発されてきた。その中で、ディレーラ変速機の操作補助に特に適した装置の例が、米国特許第5,400,675号に示されている。この種の装置は主に、第1のレバーなどの第1の操作部材と、第2のレバーなどの第2の操作部材とを含む。第1の操作部材は、ラチェット機構を作動させて、戻しバネの付勢力に抗してコントロールケーブルを巻き上げる。これに対して、第2の操作部材は、ラチェット機構を作動させて、戻しバネの付勢力にしたがってコントロールケーブルを解除する。ラチェット機構は普通、第2の操作部材が動作してその定位置から解除作動位置に移動した時点でコントロールケーブルが一度に解除されてしまわないようにストップ機構を含む。このストップ機構には、2段階の操作があるのが普通であり、第1の段階は、第2の操作部材が解除作動位置に到達した時点で起こり、第2の段階は、第2の操作部材が解除作動位置から定位置に向けてある程度の距離を戻った時点で起こる。このため、第2の操作部材が完全に定位置に復帰する前の解除作動位置付近にある時点では、変速機の変速動作が不安定になる可能性がある。
米国特許第5,400,675号
本発明の目的は、自転車用シフト制御装置のさまざまな特徴を提供することである。
本発明による1つの特徴において、自転車用シフト制御装置は、少なくとも第1の出力位置及び第2の出力位置に移動する出力伝達部材と、位置保持機構と、解除制御機構とを含む。位置保持機構は位置保持部材を含み、位置保持部材は、出力伝達部材を第1の出力位置及び第2の出力位置の一方に保持する位置保持位置と、出力伝達部材を第1の出力位置及び第2の出力位置のもう一方に移動させることのできる位置解除位置との間で移動する。解除制御機構は、第1の解除部材位置と第2の解除部材位置との間で移動する解除部材を含み、解除部材が第1の解除部材位置から第2の解除部材位置に移動するにつれて位置保持部材を位置解除位置に移動させ、解除部材が第1の解除部材位置に向けて戻る前に、または解除部材が第2の解除部材位置に向けて移動し続けている間に、位置保持部材を位置保持位置に復帰させることができる。
以上のような本発明では、解除部材の操作によって、位置保持部材を素早く位置保持位置に復帰させることができる。また、位置保持部材を素早く位置保持位置に復帰させることができるので、変速機の変速動作が不安定になるのを抑えることができる。
[自転車の全体構成]
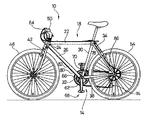
図1は、自転車用変速機における速度切換操作を補助するために、本発明による補助機構14の具体的一実施形態を組み入れた自転車10を示す側面図である。自転車10は、いかなる種類の自転車でもよく、この実施形態の自転車10は、トップチューブ22、ヘッドチューブ24、ヘッドチューブ24から下向きに延出するダウンチューブ26、トップチューブ22から下向きに延出するシートチューブ30、ダウンチューブ26とシートチューブ30との接合部に位置するボトムブラケット32、トップチューブ22から後方下向きに延出する1対のシートステイ34、及びボトムブラケット32から後方に延出する1対のチェーンステイ38を含む典型的フレーム18を有している。ヘッドチューブ24内にフォーク42が回転自在に支持されており、フォーク42の下方端部に前輪46が回転自在に支持されている。フォーク42及び前輪46の方向は、周知の方法でハンドルバー50が制御する。複数枚のスプロケット(図示せず)が同軸方向に取付けられた後輪54は、シートステイ34とチェーンステイ38との接合部に回転自在に支持されており、複数枚のフロントスプロケット(チェーンホイール)62を支持するペダルアセンブリ58が、ボトムブラケット32内で回転自在に支持されている。この実施形態では、3枚のフロントスプロケット62が、ペダルアセンブリ58と同軸状に一体回転する。チェーン66が、フロントスプロケット62の1枚と、後輪54に取付けられたフリーホイールスプロケットの1枚とに係合される。チェーン66の位置をフロントスプロケット62の1枚から別の1枚に移動させるのがフロントディレーラ70であり、チェーン66の位置をフリーホイールスプロケットの1枚から別の1枚に移動させるのがリアディレーラ74である。双方の操作は周知の通りである。この実施形態において、フロントディレーラ70の制御は、補助機構14に連結された出力制御ワイヤ78の引張り及び解除により行われ、補助機構14の制御は、ハンドルバー50左側に取付けられたシフト制御装置84に接続されているボーデン型制御ケーブル82のインナーワイヤ80により行われる。リアディレーラ74の制御は、従来通りの方法でボーデン型制御ケーブル86のインナーワイヤ80により行われる。
図1は、自転車用変速機における速度切換操作を補助するために、本発明による補助機構14の具体的一実施形態を組み入れた自転車10を示す側面図である。自転車10は、いかなる種類の自転車でもよく、この実施形態の自転車10は、トップチューブ22、ヘッドチューブ24、ヘッドチューブ24から下向きに延出するダウンチューブ26、トップチューブ22から下向きに延出するシートチューブ30、ダウンチューブ26とシートチューブ30との接合部に位置するボトムブラケット32、トップチューブ22から後方下向きに延出する1対のシートステイ34、及びボトムブラケット32から後方に延出する1対のチェーンステイ38を含む典型的フレーム18を有している。ヘッドチューブ24内にフォーク42が回転自在に支持されており、フォーク42の下方端部に前輪46が回転自在に支持されている。フォーク42及び前輪46の方向は、周知の方法でハンドルバー50が制御する。複数枚のスプロケット(図示せず)が同軸方向に取付けられた後輪54は、シートステイ34とチェーンステイ38との接合部に回転自在に支持されており、複数枚のフロントスプロケット(チェーンホイール)62を支持するペダルアセンブリ58が、ボトムブラケット32内で回転自在に支持されている。この実施形態では、3枚のフロントスプロケット62が、ペダルアセンブリ58と同軸状に一体回転する。チェーン66が、フロントスプロケット62の1枚と、後輪54に取付けられたフリーホイールスプロケットの1枚とに係合される。チェーン66の位置をフロントスプロケット62の1枚から別の1枚に移動させるのがフロントディレーラ70であり、チェーン66の位置をフリーホイールスプロケットの1枚から別の1枚に移動させるのがリアディレーラ74である。双方の操作は周知の通りである。この実施形態において、フロントディレーラ70の制御は、補助機構14に連結された出力制御ワイヤ78の引張り及び解除により行われ、補助機構14の制御は、ハンドルバー50左側に取付けられたシフト制御装置84に接続されているボーデン型制御ケーブル82のインナーワイヤ80により行われる。リアディレーラ74の制御は、従来通りの方法でボーデン型制御ケーブル86のインナーワイヤ80により行われる。
[シフト制御装置]
図2は、シフト制御装置84を示す、ハンドルバー50左側のより詳細な図であり、図3は、シフト制御装置84の分解図である。この実施形態において、シフト制御装置84は、固定式ハンドグリップ92とブレーキレバー98を支持する従来型ブレーキレバーブラケット94との間に取り付けられている。シフト制御装置84は、基部部材102と、クランプバンド106と、バネ110の形態である付勢部材と、中間部材114と、作動部材118と、保持器122とを含む。基部部材102は、ハンドルバー50を取り囲んでいる管状部分126と、管状部分126の内側端部から半径方向外向きに延出しているフランジ部分130とを含む。クランプバンド106は、固定突起部134と取付耳部138及び142を有しており、この構造が、環状凹部(図示せず)内でフランジ部分130の内周面に形成された固定溝と嵌合するようになっている。ネジ144を、フランジ部分130の開口148内と取付耳部138及び142内とに延在させ、フランジ部分に設けられたもう1つの開口153に位置するナット152内にねじ込むことにより、取付耳部138及び142を相互に向き合う方向に締付けて、クランプバンド106を締め、基部部材102をハンドルバー50に固定する。従来のネジ型である調節式コントロールケーブル連結器156がフランジ部分130上に配置されており、これにより、コントロールケーブル82のアウターケーシング81を従来通りの方法で収容することができるようになっている。当接部160a及び160bを有する、直径方向に対向して位置する凹部160(図3では一方のみを図示)が、管状部分126とフランジ部分130との接合部に形成されており、基部部材付勢係合部164が、バネ穴の形態で、フランジ部分130に形成されている。このバネ穴164内に、バネ110の端部168が嵌合される。
図2は、シフト制御装置84を示す、ハンドルバー50左側のより詳細な図であり、図3は、シフト制御装置84の分解図である。この実施形態において、シフト制御装置84は、固定式ハンドグリップ92とブレーキレバー98を支持する従来型ブレーキレバーブラケット94との間に取り付けられている。シフト制御装置84は、基部部材102と、クランプバンド106と、バネ110の形態である付勢部材と、中間部材114と、作動部材118と、保持器122とを含む。基部部材102は、ハンドルバー50を取り囲んでいる管状部分126と、管状部分126の内側端部から半径方向外向きに延出しているフランジ部分130とを含む。クランプバンド106は、固定突起部134と取付耳部138及び142を有しており、この構造が、環状凹部(図示せず)内でフランジ部分130の内周面に形成された固定溝と嵌合するようになっている。ネジ144を、フランジ部分130の開口148内と取付耳部138及び142内とに延在させ、フランジ部分に設けられたもう1つの開口153に位置するナット152内にねじ込むことにより、取付耳部138及び142を相互に向き合う方向に締付けて、クランプバンド106を締め、基部部材102をハンドルバー50に固定する。従来のネジ型である調節式コントロールケーブル連結器156がフランジ部分130上に配置されており、これにより、コントロールケーブル82のアウターケーシング81を従来通りの方法で収容することができるようになっている。当接部160a及び160bを有する、直径方向に対向して位置する凹部160(図3では一方のみを図示)が、管状部分126とフランジ部分130との接合部に形成されており、基部部材付勢係合部164が、バネ穴の形態で、フランジ部分130に形成されている。このバネ穴164内に、バネ110の端部168が嵌合される。
中間部材114は、バネ110がこの中間部材114と基部部材102のフランジ部分130との間に位置するように、基部部材102の管状部分126周囲に回動自在に支持されている。当接部172a及び172bを形成している、直径方向に対向して位置する突起またはストッパ172(図3では一方のみを図示)が、中間部材114の内側端部から軸方向に延出しており、当接部188a及び188bを形成している、直径方向に対向して位置する1対の突起またはストッパ188が、中間部材114の外周面184から半径方向外向きに延出している。バネ110の端部192は、中間部材114を時計回りに付勢するように、ストッパ188の一方に形成されたバネ開口194(これが、中間部材付勢係合部として機能する)内に嵌合されている。この構造により、ストッパ172の当接部172aが、当接部160a(これが基部部材ストッパとして機能する)に係合すると、中間部材114の基部部材102に対する回転を制限できるようになっている。
作動部材118は、中間部材114により回動自在に支持されており、中間部材114は、上述したように、基部部材102の管状部材126により回転自在に支持されている。したがって、作動部材118は、中間部材114、基部部材102の管状部分126及びハンドルバー50の周囲を同軸状に回転することができる。作動部材118は、管状部材200と、管状部材200から半径方向外向きに延出する第1及び第2のレバー204及び208と、開口212の形態をとるケーブル連結部と、直径方向に対向して位置する凹部216とを含む。開口212としてのケーブル連結部は、インナーワイヤ80が作動部材118と一体移動するように、インナーワイヤ80の端部に装着されたケーブル端部ビード(図示せず)を収容するためのものである。また、凹部216は、当接部216a及び216bを形成している。これらを組立てると、中間部材ストッパ188が、当接部216aと216bとの間で対応凹部216内に嵌合するため、当接部216a及び216bは作動部材ストッパとして機能する。この実施形態において、コントロールケーブル82のインナーワイヤ80は、補助装置14内に配置された付勢部材の作用により張力下におかれている。したがって、作動部材118は、反時計回りの方向に付勢され、これにより、中間部材ストッパ188の当接部188aが当接部216aに係合して、基部部材102の中間部材114に対する作動部材118の回転を制限するようになっている。
保持器122は、基部部材102が含む管状部材126の外側端部周囲に嵌合するものである。保持器122は、基部部材102が含む管状部分126の外側端部から半径方向外向きに延出する4つの固定タブ228を係合するように、側部表面224に4つの凹部220を均等に有している。したがって、保持器122により、作動部材118及び中間部材114は、基部部材102の周囲にて軸方向一定位置に固定される。
[シフト制御装置の操作]
図4A〜図4Cは、シフト制御装置84の操作を概略的に図示したものである。図4Aに示した作動部材118は作動部材初期位置にある。この位置では、バネ110が中間部材114を時計回り(図4Aでは右)に付勢しているため、ストッパ172の当接部172aが、基部部材102に形成された凹部160の当接部160aに接触し、補助機構14内の付勢部材(バネ232)が、作動部材118を反時計回り方向に付勢するため、凹部216の当接部216aが中間部材ストッパ188の当接部188aに接触する。したがって、当接部169a、172a、188a及び216a(及びバネ110及び232のある程度)が、初期位置位置決め機構として機能する。インナーワイヤ80は作動部材118に直接連結されているため、インナーワイヤ80もこのとき同様に、ケーブル取付部材初期位置にある。
図4A〜図4Cは、シフト制御装置84の操作を概略的に図示したものである。図4Aに示した作動部材118は作動部材初期位置にある。この位置では、バネ110が中間部材114を時計回り(図4Aでは右)に付勢しているため、ストッパ172の当接部172aが、基部部材102に形成された凹部160の当接部160aに接触し、補助機構14内の付勢部材(バネ232)が、作動部材118を反時計回り方向に付勢するため、凹部216の当接部216aが中間部材ストッパ188の当接部188aに接触する。したがって、当接部169a、172a、188a及び216a(及びバネ110及び232のある程度)が、初期位置位置決め機構として機能する。インナーワイヤ80は作動部材118に直接連結されているため、インナーワイヤ80もこのとき同様に、ケーブル取付部材初期位置にある。
補助機構14内の付勢部材232の付勢力に対抗して、図4Aに示した位置から時計回りに作動部材118を回転させることにより、作動部材118の当接部216bは、図4Bに示すように、中間部材ストッパ188の当接部188bに接触する。このとき、中間部材114は静止したままである。図4Bにおいて、作動部材118は、作動部材ダウンシフト位置にあり、インナーワイヤ80は、ケーブルダウンシフト位置に引き込まれた状態となる。
図4Aに示した位置から反時計回りに作動部材118を回転させると、当接部216aが中間部材ストッパ188の当接部188aに接触し、結局、バネ110が作動部材118と基部部材102との間で連結された状態となるため、中間部材114が、バネ110の付勢力に対抗して反時計回り(図4Cにおいて左)に回転する。これにより、作動部材118は作動部材アップシフト位置に位置し、インナーワイヤ80は、ケーブルアップシフト位置に解除される。
[補助機構]
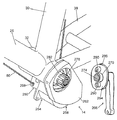
図5は、補助機構14をさらに詳しく示す図である。図5に示すように、補助機構14はボトムブラケット32に取付けられており、入力ユニット250と、位置決めユニット254と、回転部材係合ユニット258と、これに取り付けられたカバー262とを含む。この実施形態において、補助機構14は、クランクアーム266と併用されている。クランクアーム266は駆動軸取付ボス270を有している。駆動軸取付ボス270はクランクアームスプライン274を有しており、このクランクアームスプライン274に、ボトムブラケット32に回転自在に支持される駆動軸282の端部に形成された駆動軸スプライン278が回転不能に係合される。また、駆動フランジ286が、駆動軸取付ボス270から半径方向外向きに延出して形成されており、この駆動フランジ286に、半径方向に対向して位置する1対の回転部材290を支持している。1対の回転部材290は駆動部材として機能しており、この駆動部材290は、駆動フランジ286の側部表面294から垂直に延出する円形チューブの形状である。
図5は、補助機構14をさらに詳しく示す図である。図5に示すように、補助機構14はボトムブラケット32に取付けられており、入力ユニット250と、位置決めユニット254と、回転部材係合ユニット258と、これに取り付けられたカバー262とを含む。この実施形態において、補助機構14は、クランクアーム266と併用されている。クランクアーム266は駆動軸取付ボス270を有している。駆動軸取付ボス270はクランクアームスプライン274を有しており、このクランクアームスプライン274に、ボトムブラケット32に回転自在に支持される駆動軸282の端部に形成された駆動軸スプライン278が回転不能に係合される。また、駆動フランジ286が、駆動軸取付ボス270から半径方向外向きに延出して形成されており、この駆動フランジ286に、半径方向に対向して位置する1対の回転部材290を支持している。1対の回転部材290は駆動部材として機能しており、この駆動部材290は、駆動フランジ286の側部表面294から垂直に延出する円形チューブの形状である。
[補助機構−入力ユニット]
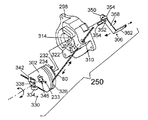
図6は、入力ユニット250の具体的な一実施形態を示す分解図である。入力ユニット250は、入力ユニット取付部材298と、ワイヤ連結部材302と、バネ232と、入力リンク306とを含む。入力ユニット取付部材298は、インナーワイヤ80用ガイドチャネル310と、位置決めユニット254の駆動軸318(図10)を内部に収容する中央駆動軸開口314と、直径方向に対向して位置する1対の開口322(図6に一方のみを図示)とを有する。ワイヤ連結部材302は、インナーワイヤ80の巻取り及び伸張を行うワイヤ巻取り溝326と、ネジ334の形態である従来型ワイヤ連結器330と、ワイヤ保持器338と、インナーワイヤ80をワイヤ連結部材302に固定するナット342と、位置決めユニット254の駆動軸318を収容する駆動軸開口346とを含む。入力リンク306は、ワイヤ連結部材302の回転位置を位置決めユニット254に伝達する役割を果たすものであり、駆動軸収容開口352を設けた駆動軸取付部分350と、連結タブ354と、半径方向に延出する部分358と、軸方向に延出する連結部分362とを含む。連結タブ354は、駆動軸取付部分350から軸方向に延出して、入力ユニット取付部材298の開口322内及びワイヤ連結部材302の対応開口(図示せず)内に挿入されることにより、連結部材302と入力リンク306とをユニットとして回転させるものである。したがって、連結部材302と入力リンク306とは共に、シフト制御装置84の作動部材118の位置に対応して、初期、アップシフト及びダウンシフトの位置をとることになる。ワイヤ連結部材302と入力リンク306とを時計回り(ワイヤ巻取り)方向に付勢するように、バネ232の一方の端部233は、ワイヤ連結部材302に取付けられ、もう一方の端部234は入力ユニット取付部材298に取付けられている。
図6は、入力ユニット250の具体的な一実施形態を示す分解図である。入力ユニット250は、入力ユニット取付部材298と、ワイヤ連結部材302と、バネ232と、入力リンク306とを含む。入力ユニット取付部材298は、インナーワイヤ80用ガイドチャネル310と、位置決めユニット254の駆動軸318(図10)を内部に収容する中央駆動軸開口314と、直径方向に対向して位置する1対の開口322(図6に一方のみを図示)とを有する。ワイヤ連結部材302は、インナーワイヤ80の巻取り及び伸張を行うワイヤ巻取り溝326と、ネジ334の形態である従来型ワイヤ連結器330と、ワイヤ保持器338と、インナーワイヤ80をワイヤ連結部材302に固定するナット342と、位置決めユニット254の駆動軸318を収容する駆動軸開口346とを含む。入力リンク306は、ワイヤ連結部材302の回転位置を位置決めユニット254に伝達する役割を果たすものであり、駆動軸収容開口352を設けた駆動軸取付部分350と、連結タブ354と、半径方向に延出する部分358と、軸方向に延出する連結部分362とを含む。連結タブ354は、駆動軸取付部分350から軸方向に延出して、入力ユニット取付部材298の開口322内及びワイヤ連結部材302の対応開口(図示せず)内に挿入されることにより、連結部材302と入力リンク306とをユニットとして回転させるものである。したがって、連結部材302と入力リンク306とは共に、シフト制御装置84の作動部材118の位置に対応して、初期、アップシフト及びダウンシフトの位置をとることになる。ワイヤ連結部材302と入力リンク306とを時計回り(ワイヤ巻取り)方向に付勢するように、バネ232の一方の端部233は、ワイヤ連結部材302に取付けられ、もう一方の端部234は入力ユニット取付部材298に取付けられている。
[補助機構−回転部材係合ユニット]
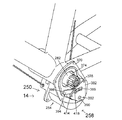
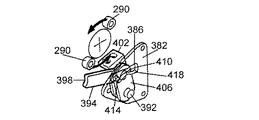
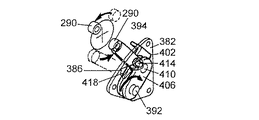
図7は、回転部材係合ユニット258のカバー262を取り外した、補助機構を示す斜視図であり、図8は補助機構14を示す背面断面図であり、図9A〜図9Dは回転部材係合ユニット258の操作を示す図である。図7、図8及び図9Aに示すように、回転部材係合ユニット258は、内部に駆動軸282を収容する開口374を有するボトムブラケット取付部材370(図7)と、軸方向に延在する側部壁378と、制御カムスロット386を有し側部壁378に装着されたカムプレート382と、下方回動軸392を支持する開口390とを含む。回転部材係合部材394の第1の端部部分391(図21)は、この実施形態ではレバー形状であり、クランクアーム266上の駆動部材290を係合するための弓状回転部材係合面398を有する。回転部材係合部材394の第2の端部(図21)は、回動軸410(図8及び図9A)により位置決めユニットインターフェースプレート402と支持プレート406との間(これらが動力伝達部材として機能する)で回動自在に接続されて、回転部材係合リンクを形成している。この回転部材係合部材394の第1の端部部分と第2の端部部分との間に、特に、回動軸410の極めて近くにカムフォロア414が配置されている。カムフォロア414は、カムスロット386により形成された制御カム表面418に係合するものである。バネ420(図8)が、位置決めユニットインターフェースプレート402及び支持プレート406を反時計回り方向に付勢する。この実施形態では、位置決めユニットインターフェースプレート402、支持プレート406、カムフォロア414及び制御カム表面418を、回転部材係合部材394を回転部材係合位置に固定し、回転部材係合部材394を回転部材非係合位置に向けて復帰させる固定機構407と見なすことができる。無論、適した固定機構を形成するために、数多くの構造体を組合わせることができる。また、カムフォロア414は回転部材係合部材394上に設けられているが、カムフォロアをスロット386内に配置し、制御カムを回転部材係合部材394上に設けることも可能である。
図7は、回転部材係合ユニット258のカバー262を取り外した、補助機構を示す斜視図であり、図8は補助機構14を示す背面断面図であり、図9A〜図9Dは回転部材係合ユニット258の操作を示す図である。図7、図8及び図9Aに示すように、回転部材係合ユニット258は、内部に駆動軸282を収容する開口374を有するボトムブラケット取付部材370(図7)と、軸方向に延在する側部壁378と、制御カムスロット386を有し側部壁378に装着されたカムプレート382と、下方回動軸392を支持する開口390とを含む。回転部材係合部材394の第1の端部部分391(図21)は、この実施形態ではレバー形状であり、クランクアーム266上の駆動部材290を係合するための弓状回転部材係合面398を有する。回転部材係合部材394の第2の端部(図21)は、回動軸410(図8及び図9A)により位置決めユニットインターフェースプレート402と支持プレート406との間(これらが動力伝達部材として機能する)で回動自在に接続されて、回転部材係合リンクを形成している。この回転部材係合部材394の第1の端部部分と第2の端部部分との間に、特に、回動軸410の極めて近くにカムフォロア414が配置されている。カムフォロア414は、カムスロット386により形成された制御カム表面418に係合するものである。バネ420(図8)が、位置決めユニットインターフェースプレート402及び支持プレート406を反時計回り方向に付勢する。この実施形態では、位置決めユニットインターフェースプレート402、支持プレート406、カムフォロア414及び制御カム表面418を、回転部材係合部材394を回転部材係合位置に固定し、回転部材係合部材394を回転部材非係合位置に向けて復帰させる固定機構407と見なすことができる。無論、適した固定機構を形成するために、数多くの構造体を組合わせることができる。また、カムフォロア414は回転部材係合部材394上に設けられているが、カムフォロアをスロット386内に配置し、制御カムを回転部材係合部材394上に設けることも可能である。
図9Aは、回転部材非係合位置にある回転部材係合部材394を示したものである。この位置において、駆動部材290は、補助機構14に何の作用も及ぼさずにクランクアーム266と共に回転する。一般に、シフト制御ユニット84の作動部材118が、アップシフト位置かダウンシフト位置かの一方に回転させられると、位置決めユニットインターフェースプレート402及び支持プレート406が図9Bに示すように反時計回りに回動する。これにより、カムフォロア414がカムスロット386内にて図9Bに示す回転部材係合位置に留まるため、回転部材係合部材394が回動軸410を中心に時計回りに回動する。この位置において、回転部材係合面398が駆動部材290の通路内にくるため、駆動部材290の1つが、図9Bに示すように回転部材係合面398に接触し、回転部材係合部材394が位置決めユニットインターフェースプレート402及び支持プレート406を、図9Cに示すように、バネ420の付勢力に対抗して時計回りに回転させることになる。クランクアーム266が回転を続けると、係合されていた駆動部材290が回転部材係合部材394からはずされるため、図9Dに示すように、回転部材係合部材394は回転部材非係合位置に戻るように反時計回りに回動し、バネ420が位置決めユニットインターフェースプレート402及び支持プレート406を、図9Aに示す位置に戻るように反時計回りに回動させることになる。
[補助機構−位置決めユニット]
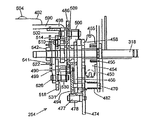
図10は、位置決めユニット254の内部の構成を示す拡大背面断面図であり、図16Aは、位置決めユニット254が含む内部の構成の一部を示す側面図である。図10に示すように、位置決めユニット254は、爪軸470の一方の端部を支持する基部プレート450と、回転部材454(出力伝達部材)と、バネ456(付勢部材)と、位置決めラチェット458(位置決め部材)とを含む。回転部材454は、駆動軸318を中心に回転自在に支持され、複数の出力位置に対して出力制御ワイヤ78の巻取り及び解除を行うためのワイヤ巻取り溝455を有する。バネ456はワイヤ解除方向に回転部材454を付勢する。位置決めラチェット458は、回転部材454に、これと一体となって回転できるように連結されている。
図10は、位置決めユニット254の内部の構成を示す拡大背面断面図であり、図16Aは、位置決めユニット254が含む内部の構成の一部を示す側面図である。図10に示すように、位置決めユニット254は、爪軸470の一方の端部を支持する基部プレート450と、回転部材454(出力伝達部材)と、バネ456(付勢部材)と、位置決めラチェット458(位置決め部材)とを含む。回転部材454は、駆動軸318を中心に回転自在に支持され、複数の出力位置に対して出力制御ワイヤ78の巻取り及び解除を行うためのワイヤ巻取り溝455を有する。バネ456はワイヤ解除方向に回転部材454を付勢する。位置決めラチェット458は、回転部材454に、これと一体となって回転できるように連結されている。
また、位置決めユニット254は、爪軸470のもう一方の端部を支持する中間プレート466と、位置保持位置と位置解除位置との間で回転できるように爪軸470により支持され、位置決め歯475及び476(図16A)を有する位置決め爪474(位置保持部材)と、位置決め歯475に取付けられた回動軸477と、回動軸477により回転自在に支持されたカムローラ478(カムフォロア)と、位置決め爪474を位置保持位置に向けて(図16Aにおける反時計回りに)付勢するように、位置決め爪474と基部プレート450との間に接続された爪用バネ482とを含む。
位置決めユニット254はさらに、解除プレート486と、伝動部材498と、爪軸502と、伝動爪506と、バネ509と、爪軸510と、モード切換爪514とを有している。解除プレート486は、駆動軸318を中心に回転自在に支持され、カムプレート494の形態であるカム部材を支持する回動軸490を有している。伝動部材498は駆動軸318を中心に回転自在に支持されている。爪軸502は伝動部材498に取付けられている。伝動爪506は爪軸502を中心に回動自在に支持されている。バネ509は伝動爪506を図16Aにおける反時計回りに付勢する。爪軸510は伝動部材498に取付けられている。モード切換爪514は爪軸510を中心に回動自在に支持されている。
さらに位置決めユニット254は、駆動軸318を中心に回転自在に支持された制御プレート518(入力伝達部材)と、基部プレート522と、基部プレート522に取り付けられた駆動制御爪530(スイッチオフ駆動制御部材)を支持する爪軸526と、図16Aにおける反時計回りに駆動制御爪530を付勢するバネ531と、基部プレート522に取付けられた駆動制御爪538(スイッチオン駆動制御部材)を支持する爪軸534(図16A)と、図16Aにおける反時計回りに駆動制御爪538を付勢するバネ539と、バネ保持器541と、図16Aにおける時計回り方向に伝動部材498を付勢するように、バネ保持器541と伝動部材498との間で接続されたバネ499と、駆動軸318を中心にこれらの構成部材を軸方向に保持するための保持ナット542とを含む。基部プレート450、基部プレート522及び駆動軸318が、さまざまな構成部材に対する取付ユニットとして機能している。
<伝動部材498>
図11は、伝動部材498を示す側面図である。伝動部材498は、基部部分550と、爪取付け耳部554と、伝動アーム558とを含む。基部部分550は、駆動軸318を内部に収容する開口562と、駆動制御爪530に接触する当接部570を形成している半径方向外向きに延出した突起566と、駆動制御爪538に接触する当接部578を形成している半径方向外向きに延出する突起574とを含む。爪取付け耳部554は、爪軸(モード切換爪514を支持する)510を取り付けるための開口582を含み、伝動アーム558も同様に、爪軸(伝動爪506を支持する)502を取り付けるための開口586を含む。伝動アーム558はまた、駆動制御爪539に接触する当接部588と、図8及び図10に示すように、ネジ594を介して位置決めユニットインターフェースプレート402に装着される、軸方向に延出する回転部材係合ユニットインターフェースプレート590とを含む。
図11は、伝動部材498を示す側面図である。伝動部材498は、基部部分550と、爪取付け耳部554と、伝動アーム558とを含む。基部部分550は、駆動軸318を内部に収容する開口562と、駆動制御爪530に接触する当接部570を形成している半径方向外向きに延出した突起566と、駆動制御爪538に接触する当接部578を形成している半径方向外向きに延出する突起574とを含む。爪取付け耳部554は、爪軸(モード切換爪514を支持する)510を取り付けるための開口582を含み、伝動アーム558も同様に、爪軸(伝動爪506を支持する)502を取り付けるための開口586を含む。伝動アーム558はまた、駆動制御爪539に接触する当接部588と、図8及び図10に示すように、ネジ594を介して位置決めユニットインターフェースプレート402に装着される、軸方向に延出する回転部材係合ユニットインターフェースプレート590とを含む。
<制御プレート518>
図12は、制御プレート518の具体的一実施形態を示す側面図である。制御プレート518は、基部部分598の形態である入力制御部材と、レバーアーム部分602と、入力ユニットインターフェースプレート604とを含む。入力ユニットインターフェースプレート604には、入力リンク306の連結部分362(図6)を収容する開口605が設けられている。基部部分598は、半径方向に延出する駆動制御カム表面またはローブ606、610、614及び618の形態である入力制御部材を含む。駆動制御カムローブ606は、上方面606aと、傾斜スロープ606b及び606cとを含む。同様に、駆動制御カムローブ610は、上方面610aと、傾斜スロープ610b及び610cとを含む。駆動制御カムローブ614は、上方面614aと、傾斜スロープ614bと、上方面614aからカムローブ618の上方面618aまで延在する移行面614cとを含む。カムローブ618はさらに、上方面618aから基部部分598の外周面598aまで延在する移行面618bを含む。以下の記載から、カムローブ606、610、614及び618と、駆動制御爪538と、突起578を設けた伝動部材438とが、回転部材係合位置と回転部材非係合位置との間における回転部材係合部材394の移動を制御する切換機構をなしていることが明白になるであろう。
図12は、制御プレート518の具体的一実施形態を示す側面図である。制御プレート518は、基部部分598の形態である入力制御部材と、レバーアーム部分602と、入力ユニットインターフェースプレート604とを含む。入力ユニットインターフェースプレート604には、入力リンク306の連結部分362(図6)を収容する開口605が設けられている。基部部分598は、半径方向に延出する駆動制御カム表面またはローブ606、610、614及び618の形態である入力制御部材を含む。駆動制御カムローブ606は、上方面606aと、傾斜スロープ606b及び606cとを含む。同様に、駆動制御カムローブ610は、上方面610aと、傾斜スロープ610b及び610cとを含む。駆動制御カムローブ614は、上方面614aと、傾斜スロープ614bと、上方面614aからカムローブ618の上方面618aまで延在する移行面614cとを含む。カムローブ618はさらに、上方面618aから基部部分598の外周面598aまで延在する移行面618bを含む。以下の記載から、カムローブ606、610、614及び618と、駆動制御爪538と、突起578を設けた伝動部材438とが、回転部材係合位置と回転部材非係合位置との間における回転部材係合部材394の移動を制御する切換機構をなしていることが明白になるであろう。
<中間プレート466>
図13は、中間プレート466の具体的一実施形態を示す側面図である。中間プレート466は、基部部分630と、爪連結アーム634と、ダウンシフト制御プレート638と、ダウンシフト制御プレート638から延出する爪連結部分642とを含む。爪連結アーム634は、このアセンブリを筐体に装着するのに使用する固定具(図示せず)を収容する開口646を含み、爪連結部分642は、爪軸(位置決め爪474を支持する)470を装着する開口650を含む。ダウンシフト制御プレート638は、以下に説明するように機能する爪制御面660を有する凹部656を構成している。
図13は、中間プレート466の具体的一実施形態を示す側面図である。中間プレート466は、基部部分630と、爪連結アーム634と、ダウンシフト制御プレート638と、ダウンシフト制御プレート638から延出する爪連結部分642とを含む。爪連結アーム634は、このアセンブリを筐体に装着するのに使用する固定具(図示せず)を収容する開口646を含み、爪連結部分642は、爪軸(位置決め爪474を支持する)470を装着する開口650を含む。ダウンシフト制御プレート638は、以下に説明するように機能する爪制御面660を有する凹部656を構成している。
<位置決めラチェット458>
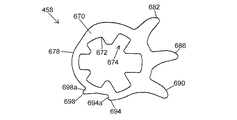
図14は、位置決めラチェット458を示す側面図である。位置決めラチェット458は、位置決めラチェット458と回転部材454とをユニットとして回転させるために、回転部材454に形成された複数の対応雄スプライン(図示せず)を回転不能に係合する複数の雌スプライン674を内周面672に形成した略環状本体670を有する。外周面678は、3つの位置決め歯682、686及び690と、駆動面694a及び698aをそれぞれ構成する2つの駆動歯694及び698とを形成している。この構造により、回転部材454を、3枚のフロントスプロケット62に適合する3つの位置に固定することができる。このスプロケットは通常、小径スプロケットと、中径スプロケットと、大径スプロケットとを含む。
図14は、位置決めラチェット458を示す側面図である。位置決めラチェット458は、位置決めラチェット458と回転部材454とをユニットとして回転させるために、回転部材454に形成された複数の対応雄スプライン(図示せず)を回転不能に係合する複数の雌スプライン674を内周面672に形成した略環状本体670を有する。外周面678は、3つの位置決め歯682、686及び690と、駆動面694a及び698aをそれぞれ構成する2つの駆動歯694及び698とを形成している。この構造により、回転部材454を、3枚のフロントスプロケット62に適合する3つの位置に固定することができる。このスプロケットは通常、小径スプロケットと、中径スプロケットと、大径スプロケットとを含む。
<伝動爪506>
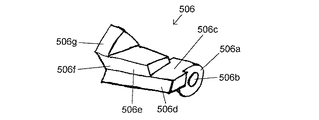
図15は、伝動爪506を示す斜視図である。伝動爪506は、爪軸502を収容する開口506bを設けた基部部分506aと、以下に説明するように中間プレート466の爪制御面660に接触するダウンシフト制御面506cと、位置決めラチェット駆動面506dと、解除プレート駆動面506eと、モード切換爪接触面506f及び506gとを含む。
図15は、伝動爪506を示す斜視図である。伝動爪506は、爪軸502を収容する開口506bを設けた基部部分506aと、以下に説明するように中間プレート466の爪制御面660に接触するダウンシフト制御面506cと、位置決めラチェット駆動面506dと、解除プレート駆動面506eと、モード切換爪接触面506f及び506gとを含む。
[位置決めユニットの操作−アップシフト]
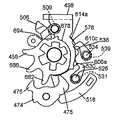
図16A〜図16Eは、アップシフト方向における位置決めユニット254の操作を示す図である。図16Aにおいて、位置決めユニット254は、フロントディレーラ70が小径フロントスプロケットの位置と一致するように配置された状態であり、フロントディレーラ70を中径フロントスプロケットまで移動させようとしているところである。図16Aで示した位置において、駆動制御爪530の先端部は、カムローブ606の上方面606aに支持され、駆動制御爪538の先端部は、カムローブ610が含むスロープ610cの底部に位置している。これにより、駆動制御爪538は、伝動部材498の当接部578と接触するため、伝動部材498を「スイッチオフ」位置に保持することができる。このように、駆動制御爪538及びカムローブ610が、伝動部材498を通常はスイッチオフ位置に維持しておく駆動制御機構をなしている。このとき、伝動爪506は、位置決めラチェット458が含む駆動歯694の上方面上で静止している。
図16A〜図16Eは、アップシフト方向における位置決めユニット254の操作を示す図である。図16Aにおいて、位置決めユニット254は、フロントディレーラ70が小径フロントスプロケットの位置と一致するように配置された状態であり、フロントディレーラ70を中径フロントスプロケットまで移動させようとしているところである。図16Aで示した位置において、駆動制御爪530の先端部は、カムローブ606の上方面606aに支持され、駆動制御爪538の先端部は、カムローブ610が含むスロープ610cの底部に位置している。これにより、駆動制御爪538は、伝動部材498の当接部578と接触するため、伝動部材498を「スイッチオフ」位置に保持することができる。このように、駆動制御爪538及びカムローブ610が、伝動部材498を通常はスイッチオフ位置に維持しておく駆動制御機構をなしている。このとき、伝動爪506は、位置決めラチェット458が含む駆動歯694の上方面上で静止している。
そこで乗り手は、作動部材118を反時計回り(図3)にアップシフト位置まで回転させて、インナーワイヤ80を作動部材118により解除する。これにより、ワイヤ連結部材302が図6の時計回りに回転し、この動作が入力リンク306を介して制御プレート518に伝達されるため、制御プレート518が図16Bに示すアップシフト位置まで時計回りに回転する。制御プレート518が時計回りに回転することにより、駆動制御爪530がカムローブ606のスロープ606cを摺動して下降し、図16Bに示す位置まで反時計回りに回転する。これと同時に、駆動制御爪538が、伝動部材498の当接部578から離れてカムローブ614の上方面614a上で静止するまで、カムローブ614のスロープ614bを摺動して上昇する。駆動制御爪538が当接部578にもはや接触していないため、伝動部材498は、駆動制御爪538が当接部588に接触するまで時計回りに回転して、図16Bに示すように「スイッチオン」位置にくる。このとき、伝動爪506は、位置決めラチェット458上で駆動歯694に保持された状態ではなくなっているため、反時計回りに回転して、位置決めラチェット458の外周面678上で静止する。この伝動部材498の時計回り動作が、回転部材係合ユニット258内にて位置決めユニットインターフェースプレート402及び支持プレート406に伝達され、これにより、回転部材係合部材394が図9Bに示す位置まで回動する。
クランクアーム266の駆動部材290が回転部材係合部材394を係合して、位置決めユニットインターフェースプレート402及び支持プレート406を図9Cに示す位置まで回動させると、この動作が伝動部材498に伝達される。そこで、伝動爪506の位置決めラチェット駆動面506dが、位置決めラチェット458の駆動歯694に係合して、位置決めラチェット458及び回転部材454を回転させることにより、出力制御ワイヤ78を巻き取る。この間、位置決め歯682は位置決め爪474の爪歯475に押付けられて、爪歯475が位置決め歯682の先端部を通過させるまで、位置決め爪474を時計方向に回転させる。通過し終わると、位置決め爪474は反時計回りに回転するため、爪歯475が、図16Cに示す位置決め歯682と686との間にくる。
クランクアーム266の駆動部材290が回転部材係合部材からはずれると、位置決めユニットインターフェースプレート402及び支持プレート406が、図9Aに示す位置に回転して戻り、この動作が伝動部材498に伝達される。これにより、伝動爪506が位置決めラチェット458の駆動歯694から離れ、位置決めラチェット458及び回転部材454は、位置決め歯682が爪歯475に衝突するまで、バネ456の付勢力にしたがって時計回りに回転する。これと同時に、フロントディレーラ70が、所望通り、中径フロントスプロケットに一致するようになる。
しかし、このとき、乗り手がまだ作動部材18を初期位置に戻していないと仮定すると、駆動制御爪538がカムローブ614の上方面614a上に静止した状態で、制御プレート518はまだアップシフト位置にある。この位置では、駆動制御爪538は、当接部578に係合することにより伝動部材498の回転を停止させることができない。したがって、伝動部材498は、図16Aに示すスイッチオフ位置に戻る代わりに、図16Bに示すスイッチオン位置まで回転を続け、回転部材係合部材394は、図9Bに示す回転部材係合位置に戻り、シフトがもう一度行われることになる。こうした操作は、用途によっては望ましく、これも本発明の範囲内である。しかし、この実施形態では、こうした2重シフトを避けるために駆動制御爪530が設けられている。具体的に言えば、駆動制御爪530は、上述したように反時計回りに回転しているため、こうした場合に伝動部材498の当接部570に接触する位置にきて、伝動部材498の回転を一時的に停止させる。これにより、伝動部材498を、図16Dに示す位置にできる。このように、駆動制御爪530及びカムローブ606は、伝動機構が回転部材係合部材394からの動作を回転部材454に伝達した後に伝動部材498がスイッチオン位置に回転して戻ることを阻止する駆動制御機構をなしている。
乗り手が作動部材118を初期位置に戻すと、制御プレート518が同様に、図16Eに示す初期位置まで回転して戻る。これと同時に、駆動制御爪530は、カムローブ606のスロープ606cを摺動して上昇し、制御爪530が伝動部材498の当接部570から離れて駆動制御爪530の先端部がカムローブ606の上方面606a上で静止するまで、時計方向に回転する。また、駆動制御爪538は、カムローブ614のスロープ614bを摺動して下降し、反時計回りに回転する。これにより、図16Eに示すように、駆動制御爪538の先端部は伝動部材498の当接部578に接触する。こうして、伝動部材498は、図16Aに元々示したようにスイッチオフ位置に戻るが、位置決めラチェット458及び回転部材454は、フロントディレーラ70を中径フロントスプロケットと整合させる位置となる。中径フロントスプロケットから大径フロントスプロケットにシフトさせる動作もこれと同様である。
[位置決めユニットの操作−ダウンシフト]
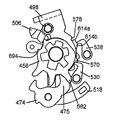
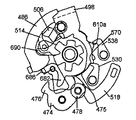
図17A〜図17Eは、位置決めユニット254のダウンシフト方向における操作を示す図である。ダウンシフト操作で重要な役割を果たす構成部材の操作がよくわかるように、いくつかの構成部材は透明なものとして図示している。回転部材454が、フロントディレーラ70が中径フロントスプロケットと一致する位置(図16Eに示した位置と同じ位置)にあり、フロントディレーラ70を小径スプロケットまで移動させたい状況を仮定すると、図17Aに示す位置において、駆動制御爪530の先端部はまたもやカムローブ606の上方面606aに支持されており、駆動制御爪538の先端部は、駆動制御爪538が伝動部材498の当接部578に接触するように、カムローブ610のスロープ610cの底部に位置している。伝動爪506は、位置決めラチェット458の駆動歯698の上方面上で静止している。全体に丸みを帯びた細長い二等辺三角形であるカムプレート494は、軸方向に延出する位置決めタブ495を含んでおり、このタブが解除プレート486の側部面487に衝突して、カムプレート494を図17Aに示す位置に保持している。
図17A〜図17Eは、位置決めユニット254のダウンシフト方向における操作を示す図である。ダウンシフト操作で重要な役割を果たす構成部材の操作がよくわかるように、いくつかの構成部材は透明なものとして図示している。回転部材454が、フロントディレーラ70が中径フロントスプロケットと一致する位置(図16Eに示した位置と同じ位置)にあり、フロントディレーラ70を小径スプロケットまで移動させたい状況を仮定すると、図17Aに示す位置において、駆動制御爪530の先端部はまたもやカムローブ606の上方面606aに支持されており、駆動制御爪538の先端部は、駆動制御爪538が伝動部材498の当接部578に接触するように、カムローブ610のスロープ610cの底部に位置している。伝動爪506は、位置決めラチェット458の駆動歯698の上方面上で静止している。全体に丸みを帯びた細長い二等辺三角形であるカムプレート494は、軸方向に延出する位置決めタブ495を含んでおり、このタブが解除プレート486の側部面487に衝突して、カムプレート494を図17Aに示す位置に保持している。
そこで乗り手は、作動部材118を時計回り図3にダウンシフト位置まで回転させて、インナーワイヤ80を作動部材118で引っ張る。これにより、ワイヤ連結部材302は図6の反時計回りに回転し、この動作が入力リンク306を介して制御プレート518に伝達されるため、制御プレート518は図17Bに示すように反時計回りに回転する。制御プレート518が反時計回りに回転することにより、駆動制御爪530がカムローブ606のスロープ606cを摺動して下降し、反時計回りに回転する。これと同時に、駆動制御爪538は、駆動制御爪538が伝動部材498の当接部578から離れてカムローブ610の上方面610a上で静止するまで、カムローブ610のスロープ610cを摺動して上昇し、時計回りに回転する。駆動制御爪538が当接部578にもはや接触していないため、伝動部材498は、駆動制御爪538が当接部588に接触して伝動部材498が図17Bに示す「スイッチオン」位置にくるまで、時計回りに回転する。このとき、伝動爪506は、カムローブ618の移行面618bにより時計回りに回転し、モード切換爪514は、伝動爪506を一時的に図17Bに示す位置に保持するように、時計回りに回転して、伝動爪506のモード切換爪接触面506fに係合する。この伝動部材498の動作が、回転部材係合ユニット258内において位置決めユニットインターフェースプレート402及び支持プレート406に伝達され、これにより、回転部材係合部材394が図9Bに示す位置まで回動する。
クランクアーム266の駆動部材290が回転部材係合部材394を係合して、位置決めユニットインターフェースプレート402及び支持プレート406を図9Cに示す位置まで回動させると、この動作がまた伝動部材498に伝達される。しかし、今度は、伝動爪506の解除プレート駆動面506eが、解除プレート486の当接部487を係合し(これが第1の解除部材位置)、解除プレート486が図17Cに示すように反時計回りに回転する。このように、このモードにおける伝動部材498は、解除プレート486用の解除駆動部材として機能する。解除プレート486が回転するにつれて、カムプレート494の基部面496は、位置決め爪474に装着されたカムローラに接触して、位置決め爪474を反時計回りに回転させる。爪歯475の先端が位置決め歯682の先端を通過すると、位置決めラチェット458及び回転部454は、位置決め歯686が爪歯476に衝突して位置決めラチェット458及び回転部454の制御されない回転を阻止するまで、バネ456の付勢力にしたがって時計回りに回転する。
解除プレート486が第2の解除部材位置(解除プレート486の動作範囲の終点)に向けて反時計回りの回転を続けると、カムローラ478がカムプレート494の丸い角部またはカムローブ497に到達して、図17Cに示すようにカムプレート494を反時計回りに回転させる。これにより、位置決め爪474は反時計回りに回転して、爪歯476を位置決め歯686から遠ざかる方向に移動させ、位置決めラチェット458及び回転部材454を、フロントディレーラ70が小径スプロケットに一致するように回転部材454が位置決めされるまで、反時計回りに回転させつづけることができる。
シフト操作を制御するために位置決め爪及び位置決めラチェットを用いる周知のシステムにしたがってこのシステムを操作した場合、爪歯476は、解除プレート486が向きを逆にして(すなわち、時計回りに回転して)シフト操作を完了するまで、位置決め歯686に係合した状態を続けることになる。本発明により製造したシフト制御機構の場合、この状態を続ける必要はない。回転自在なカムプレート494が設けられているため、解除プレート486が反時計回りに回転している間にも、位置決め爪474はすぐにシフト操作を完了できるからである。したがって、解除プレート486が第2の解除部材位置に向けて移動している間に、位置決め爪474を位置解除位置に移動させ、さらに、解除プレート486が第2の解除部材位置に向けて移動し続ける間に、位置決め爪474を位置保持位置に復帰させることができるため、解除プレート486及びカムプレート494を、位置決め爪474を位置解除位置まで移動させる解除制御機構と見なすことができる。
この好適実施形態のもう1つの有利な特徴は、伝動部材498がまだ反時計回りに回転している間にも解除プレート486を逆向きに回転させられることである。この好適実施形態によれば、伝動部材498が図17C及び図18Aに示す位置にある間、図18Aに示すように、伝動爪506のダウンシフト制御面506fが、中間プレート466の爪制御面660に接触し始める。伝動部材498がさらに回転することにより、伝動爪506は図17D及び図18Bに示すように反時計回りに回転して、解除プレート486との係合状態からはずれる。モード切換爪514はまた、伝動爪506のモード切換爪接触面506fからはずれて、モード切換爪接触面506g上に静止する。この結果、解除プレート486は、伝動部材498がまだ図17Dに示す反時計回り位置にある間にも、図17Dに示す位置に直ちに復帰することができる。
クランクアーム266の駆動部材290が回転部材係合部材394からはずれると、位置決めユニットインターフェースプレート402及び支持プレート406がまた、図8Aに示す位置に向けて回転し、この動作が伝動部材498に伝達される。もう一度、乗り手がまだ作動部材118を初期位置に回転させていないと仮定すると、駆動制御爪538をカムローブ610の上方面610a上に静止させた状態で、制御プレート518はまだダウンシフト位置にあるが、駆動制御爪530が伝動部材498の当接部570に接触する。これにより、伝動部材498が図17Eに示す停止位置にくる。
乗り手が作動部材118を初期位置に戻すと、制御プレート518も同様に、図17Fに示す初期位置まで時計回りに回転して戻る。これと同時に、駆動制御爪530は、伝動部材498の当接部570からはずれ、その先端部がカムローブ606の上方面606a上で静止するまで、カムローブ606のスロープ606bを摺動して上昇して時計回りに回転する。これと同時に、駆動制御爪538は、カムローブ610のスロープ610cを摺動して下降して反時計回りに回転して、図17Fに示すように、その先端部を伝動部材498の当接部578に接触させる。伝動部材498はここで、図17Aに元々示したスイッチオフ位置にくるが、位置決めラチェット458及び回転部材454は、フロントディレーラ70を小径フロントスプロケットに一致させる位置にくる。
大径フロントスプロケットから中径フロントスプロケットへシフトする操作も同様である。しかし、この場合、爪歯475が位置決め歯686にぶつかるように、位置決めラチェット458がまず位置決めされる。カムプレート494からの圧力に応じて位置決め爪474が時計回りに回転するにつれて、爪歯475は位置決め歯686を通過し、位置決めラチェット458は、位置決め歯690が爪歯476に接触するまで、反時計回りに回転する。位置決め爪474が、カムプレート494のカムローブ497がカムローラ478に到達するように反時計回りに回転すると、爪歯475が、位置決め爪682と686との間の空間に入り、爪歯476が位置決め歯690を解除する。これにより、位置決めラチェット458及び回転部材454は、位置決め爪682が爪歯475に接触するまで、時計回りに回転する。こうして、位置決めラチェット458及び回転自在な部材454は、図17Aに示す位置に維持される。
[駆動制御爪の変形例]
前記好適実施形態では、別々に動作する駆動制御爪530及び538が設けられているが、図19A及び図19Bには、爪歯704及び708を具備した単一駆動制御爪700が図示されている。図19Aに示すように、伝動部材498が定位置にあると、爪歯704が伝動部材498の当接部578に接触する。図19Bに示すように、伝動部材498がスイッチオフ位置まで時計回りに回転して、制御プレート486がまだ初期位置に回転していない状態であると、爪歯708が伝動部材498の当接部570に接触する。
前記好適実施形態では、別々に動作する駆動制御爪530及び538が設けられているが、図19A及び図19Bには、爪歯704及び708を具備した単一駆動制御爪700が図示されている。図19Aに示すように、伝動部材498が定位置にあると、爪歯704が伝動部材498の当接部578に接触する。図19Bに示すように、伝動部材498がスイッチオフ位置まで時計回りに回転して、制御プレート486がまだ初期位置に回転していない状態であると、爪歯708が伝動部材498の当接部570に接触する。
[位置決め爪474制御の変形例]
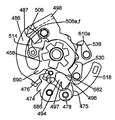
前記実施形態では、ダウンシフト操作において位置決め爪474を制御するのにカムプレート494を用いたが、図20に示す実施形態では、カムホイール750が位置決め爪474の操作を制御する。この実施形態において、カムホイール750は、位置決めラチェット458に対して同軸状に回転自在に取付けられており、周方向に配置された複数のカム歯754と、周方向に配置された複数のカム駆動歯758とを含む。カム駆動爪762は、回動軸766を介して解除プレート486’に回動自在に取付けられており、バネ770により反時計回りに付勢されるものである。解除プレート486’がダウンシフト操作時に反時計回りに回転すると、カム駆動爪762が、カム駆動歯758の1つに係合して、カムホイール750を反時計回り方向に回転させる。カム歯754の1つがカムローラ478を押圧するため、位置決め爪474が、前記実施形態と同様に時計回り方向に回転する。カム歯754がカムローラ478を通過した時点で、位置決め爪474が反時計回り方向に回転し、ダウンシフト操作が完了する。解除プレート486’が反時計回り方向に回転すると、カム駆動爪762が対応カム駆動歯758からはずれる。
前記実施形態では、ダウンシフト操作において位置決め爪474を制御するのにカムプレート494を用いたが、図20に示す実施形態では、カムホイール750が位置決め爪474の操作を制御する。この実施形態において、カムホイール750は、位置決めラチェット458に対して同軸状に回転自在に取付けられており、周方向に配置された複数のカム歯754と、周方向に配置された複数のカム駆動歯758とを含む。カム駆動爪762は、回動軸766を介して解除プレート486’に回動自在に取付けられており、バネ770により反時計回りに付勢されるものである。解除プレート486’がダウンシフト操作時に反時計回りに回転すると、カム駆動爪762が、カム駆動歯758の1つに係合して、カムホイール750を反時計回り方向に回転させる。カム歯754の1つがカムローラ478を押圧するため、位置決め爪474が、前記実施形態と同様に時計回り方向に回転する。カム歯754がカムローラ478を通過した時点で、位置決め爪474が反時計回り方向に回転し、ダウンシフト操作が完了する。解除プレート486’が反時計回り方向に回転すると、カム駆動爪762が対応カム駆動歯758からはずれる。
[シフト制御装置の別の実施形態]
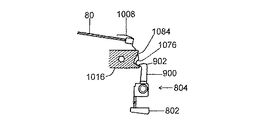
図21は、補助機構14と併用可能なシフト制御装置800の別の実施形態を示す詳細な図であり、図22は、シフト制御装置800の分解図である。この実施形態において、シフト制御装置800は、ブレーキレバーブラケット94の内側に隣接してハンドルバー50に取付けられている。シフト制御装置800は、周知の方法でネジ824によりシフト制御装置800をハンドルバー50にクランプするための一体形成型クランプバンド820を含む基部部材816などの取付ユニットを含む。ネジ型調節式コントロールケーブル連結器828が、基部部材816のフランジ部分832内にねじ込まれており、これに、コントロールケーブル82のアウターケーシング81を従来通りの方法で収容することができるようになっている。一般に、作動部材804の指接触部分802を押すとコントロールケーブル82のインナーワイヤ80が解除され、作動部材808の指接触部分806を押すとコントロールケーブル82のインナーワイヤ80が引っ張られる。その時点で選択されているギアは、ギアインジケータユニット812で示される。
図21は、補助機構14と併用可能なシフト制御装置800の別の実施形態を示す詳細な図であり、図22は、シフト制御装置800の分解図である。この実施形態において、シフト制御装置800は、ブレーキレバーブラケット94の内側に隣接してハンドルバー50に取付けられている。シフト制御装置800は、周知の方法でネジ824によりシフト制御装置800をハンドルバー50にクランプするための一体形成型クランプバンド820を含む基部部材816などの取付ユニットを含む。ネジ型調節式コントロールケーブル連結器828が、基部部材816のフランジ部分832内にねじ込まれており、これに、コントロールケーブル82のアウターケーシング81を従来通りの方法で収容することができるようになっている。一般に、作動部材804の指接触部分802を押すとコントロールケーブル82のインナーワイヤ80が解除され、作動部材808の指接触部分806を押すとコントロールケーブル82のインナーワイヤ80が引っ張られる。その時点で選択されているギアは、ギアインジケータユニット812で示される。
基部部材816の下側には、側壁844及び848を有する作動部材支持部836がネジ840により取付けられている。この側壁844に、支持部852、作動部材ガイド856、支持部860、付勢支持部材プレート864、及び支持部868がネジ872(図22には1つのみを図示)により取付けられている。作動部材804は、指接触部分802から延出している細長部分876を含み、この部分に、作動部材804がハンドルバー50に略垂直な方向で図21に示す定位置などの第1の作動部材位置と図24Dに示す最も内側に押された位置などの第2の作動部材位置との間で移動(例えば摺動)するように、作動部材ガイド856を取り囲む開口880が設けられている。爪支持基部884が、細長部分876の遠位端から横方向に延出し、爪軸888が、爪支持基部884から上方に延出している。バネ892が、作動部材804を定位置に向けて付勢するように、付勢支持プレート864の突起部896と爪支持基部884との間で接続されている。作動部材当接部(例えば、歯)902を含む爪900などの作動部材駆動部材が、爪軸888により回動自在に支持されて、爪支持基部884と爪900との間に取付けられた爪バネ904などの駆動部材付勢機構により時計回り方向に付勢されている。爪900は、クリップ908及びワッシャ912により、爪支持部シャフト888に固定されている。
同様に、側壁848に、支持部920、作動部材ガイド924、支持部928、付勢支持部材プレート932、及び支持部936がネジ940(図22には1つのみを図示)により取り付けられている。作動部材808は、指接触部分806から延出している細長部分944を含み、この部分に、作動部材808がハンドルバー50に略垂直な方向で図21に示す定位置などの第1の作動部材位置と最も内側に押された位置などの第2の作動部材位置との間で移動(例えば摺動)するように、作動部材ガイド924を取り囲む開口948が設けられている。爪支持基部952が、細長部分944の遠位端から横方向に延出し、爪軸956が、爪支持基部952から上方に延出している。バネ960が、作動部材808を定位置に向けて付勢するように、付勢支持プレート932の突起部964と爪支持基部952との間に設けられている。作動部材当接部(例えば、歯)970を含む爪968などの作動部材駆動部材が、爪軸956により回動自在に支持されて、爪支持基部952と爪968との間に取付けられた爪バネ972などの駆動部材付勢機構により反時計回り方向に付勢されている。爪968は、クリップ976及びワッシャ980により、爪支持部シャフト956に固定されている。
ボルト984は、そのヘッド996の高さが基部部材816の上面と実質的に同じになるように、基部部材816の開口988内及び作動部材支持部836の開口992内に延在している。ボルト984はさらに、ワイヤ巻取部材1008などのケーブル取付部材の中央開口1004内に嵌合するブシュ1000内、解除プレート1016の開口1012内、ワッシャ1020、1028及びスペーサ1024内、付勢プレート1036の中央開口1032内、スペーサ1040及びワッシャ1044内、半径方向に巻かれたバネ1048の内側、付勢プレート1056の中央開口1052内、ワッシャ1060、及び付勢止めプレート1068の中央開口1064内に延出する。これらの部材は、ボルト984のネジ切り端部1074に螺合するナット1072により、ボルト984に固定されている。
ワイヤ巻取部材1008は、当接部または制御面1076及び1080などの被駆動部と、下向きに延出する付勢係合部材1120と、コントロールケーブル82のインナーワイヤ80を巻取り、解除するためのワイヤ巻取り溝1122とを含む。解除プレート1016が、基部部材816にネジ1090で固定されており、これが、カム面1084及び1088などの解除部材を含む。上述した部材の機能を、以下に記載する。
付勢プレート1036は、半径方向外向きに延出するストッパ1116と、半径方向外向きに延出するワイヤ巻取り部材付勢部材1124とを含む。同様に、付勢プレート1056は、半径方向外向きに延出するストッパ1108と、半径方向外向きに延出するワイヤ巻取り部材付勢部材1128とを含む。バネ1048の一方の端部1092が、付勢プレート1056に周方向に設けられた複数開口1096の1つの内部に挿入され、バネ1048のもう一方の端部1100が付勢プレート1056のストッパ1108を係合する。このような構成により、付勢プレート1036は時計方向に付勢されて、ストッパ1116が、付勢止めプレート1068から上方に延出する折り曲げ部1112に当接し、付勢プレート1056は反時計方向に付勢されて、ストッパ1108が折り曲げ部1112に当接する。したがって、付勢プレート1036及び1056とバネ1048とが、操作機構が停止状態にある間、ケーブル取付部材を第1のケーブル取付部材位置に固定するケーブル取付部材初期位置位置決め機構として機能する。ワイヤ巻取部材1008の付勢係合部材1120が、第1のケーブル取付部材位置(例えば、定位置または初期位置)において、ワイヤ巻取部材付勢部材1124と1128との間に挟持される。ワイヤ巻取部材1008が、第2のケーブル取付部材位置(例えば、ワイヤ引上げ位置)に向けて反時計回り方向に第1の経路に沿って回転すると、バネ1048及び付勢プレート1036が、ワイヤ巻取部材1008を第1のケーブル取付部材位置に向けて時計回りに付勢して戻すケーブル取付部材付勢機構として機能する。同様に、ワイヤ巻取部材1008が、第3のケーブル取付部材位置(例えば、ワイヤ解除位置)に向けて時計回り方向に第2の経路に沿って回転すると、バネ1048及び付勢プレート1056が、ワイヤ巻取部材1008を第1のケーブル取付部材位置に向けて反時計回りに付勢して戻すケーブル取付部材付勢機構として機能する。言い換えれば、付勢プレート1036、1056及びバネ1048は、操作機構が停止状態にある間、ワイヤ巻取部材1008を第1のケーブル取付部材位置に固定するワイヤ巻取部材初期位置位置決め機構としても機能する。
[ギアインジケータユニット]
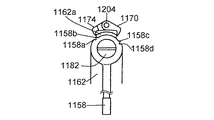
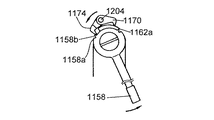
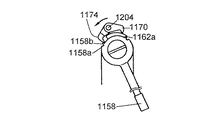
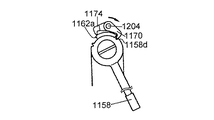
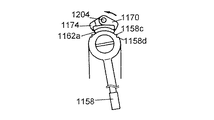
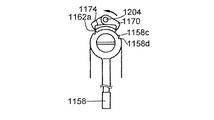
ギアインジケータユニット812は、透明な窓1154を備えたカバー1150(図21)と、インジケータ1158と、爪支持プレート1162と、伝動部材1166と、爪1170及び1174などのインジケータ駆動部材と、付勢バネ1178とを含む。インジケータ1158は、ネジ1182及びワッシャ1186でボルト984のヘッド996に回転自在に取付けられている。図25Aに詳細に示すように、インジケータ1158は、爪歯1158a、1158b、1158c及び1158dなどのインジケータ被駆動部材を含む。爪支持プレート1162も、ネジ1182によりボルト984のヘッド996に取付けられており、基部部材816の突起部1194に爪支持プレート1162の突起部1190が係合する構造により、基部部材816に回転できない状態で固定されている。爪支持プレート1162は、以下に説明するように機能する爪非係合面1162aを含む。
ギアインジケータユニット812は、透明な窓1154を備えたカバー1150(図21)と、インジケータ1158と、爪支持プレート1162と、伝動部材1166と、爪1170及び1174などのインジケータ駆動部材と、付勢バネ1178とを含む。インジケータ1158は、ネジ1182及びワッシャ1186でボルト984のヘッド996に回転自在に取付けられている。図25Aに詳細に示すように、インジケータ1158は、爪歯1158a、1158b、1158c及び1158dなどのインジケータ被駆動部材を含む。爪支持プレート1162も、ネジ1182によりボルト984のヘッド996に取付けられており、基部部材816の突起部1194に爪支持プレート1162の突起部1190が係合する構造により、基部部材816に回転できない状態で固定されている。爪支持プレート1162は、以下に説明するように機能する爪非係合面1162aを含む。
伝動部材1166は、ワイヤ巻取部材1008に形成された開口1200に係合する1対のタブ1198により、ワイヤ巻取部材1008に連結されている。これにより、伝動部材1166はユニットとして、ワイヤ巻取部材1008と共に移動する。伝動部材1166はまた、爪1170及び1174を回動自在に支持するように、爪軸1204を含む。これにより各爪は、インジケータ被駆動部材係合位置とインジケータ被駆動部材非係合位置との間を移動できるようになっている。バネ1178の一端部1230が、爪1170と係合して、爪1170をその対応インジケータ被駆動部材係合位置方向に付勢する付勢機構として機能する。同様に、バネ1178の一端部1234が、爪1174と係合して、爪1174をその対応インジケータ被駆動部材係合位置に向けて付勢する付勢機構として機能する。爪1170及び1174とバネ1178とは、クリップ1208により爪軸1204に固定されている。
[シフト制御装置の動作:ワイヤ巻取方向]
図23A〜図23B及び図24A〜図24Dは、図23A及び図24Aに示す作動部材804が第1のシフト制御(オペレータアタッチメント)位置から図24Dに示す第3のシフト制御(オペレータアタッチメント)位置まで移動する間のシフト制御装置800の操作を示している(底部から180°回転させて見たところ)。まず作動部材804の指接触部分802を押すと、爪歯902がカム面1084に沿って移動する。次に、バネ904の付勢力とカム面1084の形状とにより、爪900が反時計回りに回転すると、図24Bに示すように、爪歯902がワイヤ巻取部材1008の当接部1076を係合(例えば、接触)する。さらに指接触部分802を押すと、図24Cに示すように、ワイヤ巻取部材1008が反時計回りに回転して、インナーワイヤ80を解除し、補助機構14が上述したように動作する。したがって、作動部材804及び爪900を、ワイヤ巻取部材1008を第1のケーブル取付部材位置から第3のケーブル取付部材位置に向けて動作させる操作機構の一部と見なすことができる。同時に、付勢係合部材1120が、付勢プレート1056のワイヤ巻取部材付勢部材1128を図23Bに示すように押付けられて、付勢プレート1056をバネ1048の付勢力に抗して反時計回りに回転させる。さらに指接触部分802を押すことにより、カム面1084の形状の影響で、爪900が時計回りに回転して、図24Dに示すように、爪歯902がワイヤ巻取部材1008の当接部1076から外れる。このように外れると、バネ1048の付勢力により、ワイヤ巻取部材1008及び付勢プレート1056は、図23A及び図24Aに示す位置まで反時計回りに回転して戻る。爪歯902が当接部1076から外れることにより、指接触部材802にはクリック感が伝わるため、乗り手は指接触部材806を放してよいことがわかる。
図23A〜図23B及び図24A〜図24Dは、図23A及び図24Aに示す作動部材804が第1のシフト制御(オペレータアタッチメント)位置から図24Dに示す第3のシフト制御(オペレータアタッチメント)位置まで移動する間のシフト制御装置800の操作を示している(底部から180°回転させて見たところ)。まず作動部材804の指接触部分802を押すと、爪歯902がカム面1084に沿って移動する。次に、バネ904の付勢力とカム面1084の形状とにより、爪900が反時計回りに回転すると、図24Bに示すように、爪歯902がワイヤ巻取部材1008の当接部1076を係合(例えば、接触)する。さらに指接触部分802を押すと、図24Cに示すように、ワイヤ巻取部材1008が反時計回りに回転して、インナーワイヤ80を解除し、補助機構14が上述したように動作する。したがって、作動部材804及び爪900を、ワイヤ巻取部材1008を第1のケーブル取付部材位置から第3のケーブル取付部材位置に向けて動作させる操作機構の一部と見なすことができる。同時に、付勢係合部材1120が、付勢プレート1056のワイヤ巻取部材付勢部材1128を図23Bに示すように押付けられて、付勢プレート1056をバネ1048の付勢力に抗して反時計回りに回転させる。さらに指接触部分802を押すことにより、カム面1084の形状の影響で、爪900が時計回りに回転して、図24Dに示すように、爪歯902がワイヤ巻取部材1008の当接部1076から外れる。このように外れると、バネ1048の付勢力により、ワイヤ巻取部材1008及び付勢プレート1056は、図23A及び図24Aに示す位置まで反時計回りに回転して戻る。爪歯902が当接部1076から外れることにより、指接触部材802にはクリック感が伝わるため、乗り手は指接触部材806を放してよいことがわかる。
シフト制御装置800は、作動部材808の指接触部材806が図23Cに示すように押された場合も同様に動作する。この場合、爪歯970はワイヤ巻取部材1008の当接部1080に係合して、ワイヤ巻取部材1008を第1のシフト制御(オペレータアタッチメント)位置から時計回りにワイヤ引上げ方向に第2のシフト制御(オペレータアタッチメント)位置まで回転させるため、これに伴って補助機構14が動作する。したがって、作動部材806及び爪968を、ワイヤ巻取部材1008を第1のケーブル取付部材位置から第2のケーブル取付部材位置まで動作させる操作機構のもう1つの一部と見なすことができる。同時に、付勢係合部材1120が、図23Cに示すように、付勢プレート1036のワイヤ巻取部材付勢部材1124に押付けられて、付勢プレート1036をバネ1048の付勢力に抗して時計回りに回転させる。さらに指接触部分806を押すことにより、カム面1088の形状の影響で、爪968が反時計回りに回転して、爪歯970がワイヤ巻取部材1008の当接部1088から外れる。爪968が外れた時点で、バネ1048の付勢力により、ワイヤ巻取部材1008及び付勢プレート1036は反時計回りに回転して図23Aに示す位置に戻る。爪歯970が当接部1088から外れることにより、指接触部材806に同様にクリック感が伝わるため、乗り手は指接触部材806を放してよいことがわかる。
[インジケータの動作]
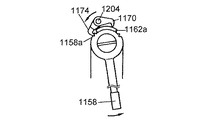
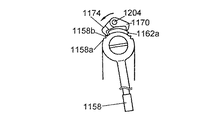
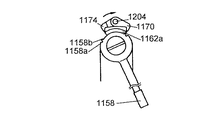
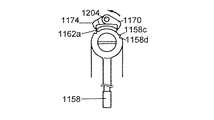
シフト制御装置800がワイヤ引上げ方向に動作した時点におけるインジケータユニット812の動作(上から見たところ)を、図25A〜図25Iに示す。図25Aは、インジケータ1158が定位置にある状態を示している。同時に、ワイヤ巻取部材1008は第1のケーブル取付部材位置にあり、爪1170及び1174は爪解除面1162aにより支持されている。作動部材808の指接触面806が押された結果としてワイヤ巻取部材1008が反時計回りに回転すると、伝動部材1166が爪1170及び1174を図25Bに示す位置に移動させるため、爪1174が爪歯1158aに接触する。ワイヤ巻取部材1008がさらに回転することにより、爪1174が爪歯1158aに押付けられて、インジケータ1158を図25Cに示す位置まで回転させる。爪歯970が当接部1080から外れ、ワイヤ巻取部材1008が時計回りに第1のケーブル取付部材位置に向けて回転しながら戻ると、伝動部材1166により、爪1174は爪歯1158aから外れ、爪1170及び1174は図25Dに示す位置まで回転する。このとき、爪1170及び1174は、爪解除面1162aに支持される。このように、ワイヤ巻取部材1008がその元の位置まで回転しながら戻っていても、インジケータ1158は、新たに選択されたギアを反映する。
シフト制御装置800がワイヤ引上げ方向に動作した時点におけるインジケータユニット812の動作(上から見たところ)を、図25A〜図25Iに示す。図25Aは、インジケータ1158が定位置にある状態を示している。同時に、ワイヤ巻取部材1008は第1のケーブル取付部材位置にあり、爪1170及び1174は爪解除面1162aにより支持されている。作動部材808の指接触面806が押された結果としてワイヤ巻取部材1008が反時計回りに回転すると、伝動部材1166が爪1170及び1174を図25Bに示す位置に移動させるため、爪1174が爪歯1158aに接触する。ワイヤ巻取部材1008がさらに回転することにより、爪1174が爪歯1158aに押付けられて、インジケータ1158を図25Cに示す位置まで回転させる。爪歯970が当接部1080から外れ、ワイヤ巻取部材1008が時計回りに第1のケーブル取付部材位置に向けて回転しながら戻ると、伝動部材1166により、爪1174は爪歯1158aから外れ、爪1170及び1174は図25Dに示す位置まで回転する。このとき、爪1170及び1174は、爪解除面1162aに支持される。このように、ワイヤ巻取部材1008がその元の位置まで回転しながら戻っていても、インジケータ1158は、新たに選択されたギアを反映する。
作動部材808の指接触面806が2回目に押された結果としてワイヤ巻取部材1008が反時計回りに回転すると、伝動部材1166が爪1170及び1174を図25Eに示す位置まで移動させるため、爪1174が爪歯1158bに接触する。ワイヤ巻取部材1008がさらに回転することにより、爪1174が爪歯1158bに押付けられて、インジケータ1158を図25Fに示す位置まで回転させる。爪歯970が当接部1080から外れ、ワイヤ巻取部材1008が時計回りに第1のケーブル取付部材位置に向けて回転しながら戻ると、伝動部材1166により、爪1174が爪歯1158bから外れ、爪1170及び1174は図25Gに示す位置まで回転しながら戻る。こうして、爪1170及び1174は爪支持部材1162aに支持され、インジケータ1158は、最終的に選択されたギアを反映する状態となる。
この実施形態において、補助機構14は3枚のフロントギアを収容する。乗り手が、ディレーラがすでに最終ギア位置にあることを忘れて、指接触部材806を再度押した場合、ワイヤ巻取部材1008が再度反時計回りに回転し、伝動部材1166が爪1170及び1174を図25Hに示す位置に移動させる。しかし、この場合は爪歯が係合しないため、インジケータ1158は同じ位置に留まる。続いて、ワイヤ巻取部材1008が第1のケーブル取付部材位置に回転しながら戻り、爪1170及び1174は再度爪解除面1162aに支持される。無論、爪歯の数を増減すれば、所望に応じてギアの数を増減することができる。
[シフト制御装置の動作:ワイヤ解除方向]
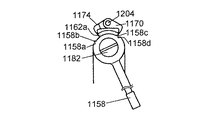
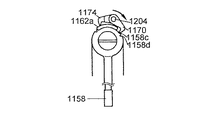
シフト制御装置800が反対(ワイヤ解除)方向に動作した時点におけるインジケータユニット812の動作を、図26A〜図26Iに示す。図26Aは、インジケータ1158が図25Hの位置と同じ位置にあることを示している。すなわち、ワイヤ巻取部材1008は第1のケーブル取付部材位置にあり、爪1170及び1174は爪解除面1162aに支持されている。作動部材804の指接触面802が押されて、ワイヤ巻取部材1008が時計回りに回転すると、伝動部材1166が爪1170及び1174を図26Bに示す位置まで移動させるため、爪1170が爪歯1158dに接触する。ワイヤ巻取部材1008がさらに回転すると、爪1170が爪歯1158dに押付けられて、インジケータ1158を図26Cに示す位置まで回転させる。爪歯902が当接部1076から外れて、ワイヤ巻取部材1008が時計回りに第1のケーブル取付部材位置に向けて回転しながら戻ると、伝動部材1166により、爪1170は爪歯1158dから外れ、爪1170及び1174は図26(D)に示す位置まで回転しながら戻る。こうして、爪1170及び1174は、爪解除面1162aに支持された状態となる。
シフト制御装置800が反対(ワイヤ解除)方向に動作した時点におけるインジケータユニット812の動作を、図26A〜図26Iに示す。図26Aは、インジケータ1158が図25Hの位置と同じ位置にあることを示している。すなわち、ワイヤ巻取部材1008は第1のケーブル取付部材位置にあり、爪1170及び1174は爪解除面1162aに支持されている。作動部材804の指接触面802が押されて、ワイヤ巻取部材1008が時計回りに回転すると、伝動部材1166が爪1170及び1174を図26Bに示す位置まで移動させるため、爪1170が爪歯1158dに接触する。ワイヤ巻取部材1008がさらに回転すると、爪1170が爪歯1158dに押付けられて、インジケータ1158を図26Cに示す位置まで回転させる。爪歯902が当接部1076から外れて、ワイヤ巻取部材1008が時計回りに第1のケーブル取付部材位置に向けて回転しながら戻ると、伝動部材1166により、爪1170は爪歯1158dから外れ、爪1170及び1174は図26(D)に示す位置まで回転しながら戻る。こうして、爪1170及び1174は、爪解除面1162aに支持された状態となる。
作動部材804の指接触面802が2回目に押された結果としてワイヤ巻取部材1008が時計回りに回転すると、伝動部材1166が爪1170及び1174を図26Eに示す位置まで移動させるため、爪1170が爪歯1158cに接触する。ワイヤ巻取部材1008がさらに回転することにより、爪1170が爪歯1158cに押付けられて、インジケータ1158を図26Fに示す位置まで回転させる。爪歯902が当接部1080から外れ、ワイヤ巻取部材1008が反時計回りに第1のケーブル取付部材位置に向けて回転しながら戻ると、伝動部材1166により、爪1170は爪歯1158cから外れ、爪1170及び1174は図26Gに示す位置まで回転する。こうして、爪1170及び1174は、爪解除面1162aに支持され、インジケータ1158は、その元の位置に戻った状態となる。
この場合もまた、乗り手が、ディレーラがすでに最終ギア位置にあることを忘れて、指接触部材806を再度押した場合、ワイヤ巻取部材1008は再度時計回りに回転し、伝動部材1166は爪1170及び1174を図26Hに示す位置に移動させる。しかし、爪歯が係合しないため、インジケータ1158は同じ位置に留まり、ワイヤ巻取部材1008が第1のケーブル取付部材位置に回転しながら戻り、爪1170及び1174は再度爪解除面1162aに支持された状態となる。
[シフトレバー機構]
開示した実施形態のさまざまな教示内容を、別の環境に適用することができる。たとえば、図27(A)〜図27(H)は、図17(A)〜図17(F)に示した解除機構の構造及び動作のいくつかを組み入れたシフトレバー機構1300を示すものである。シフトレバー機構1300は通常、支持部材に取付けられ、かつ/または筐体内に配置される。しかし、これらの図面では、この実施形態を理解し易くするために、構造のみを図示している。
開示した実施形態のさまざまな教示内容を、別の環境に適用することができる。たとえば、図27(A)〜図27(H)は、図17(A)〜図17(F)に示した解除機構の構造及び動作のいくつかを組み入れたシフトレバー機構1300を示すものである。シフトレバー機構1300は通常、支持部材に取付けられ、かつ/または筐体内に配置される。しかし、これらの図面では、この実施形態を理解し易くするために、構造のみを図示している。
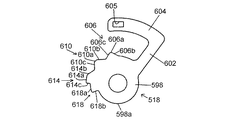
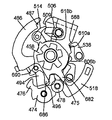
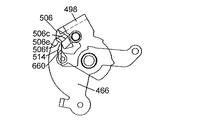
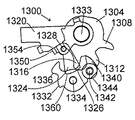
図27(A)に示すように、シフトレバー機構1300は、位置決めラチェット1304の形態である位置決め部材と、位置保持部材1332と、シフトレバー1320の形態である解除部材と、カムプレート1324の形態であるカム部材とを含む。位置決めラチェット1304は、回転部材(図示していないが、図10の回転部材454に類似したもの)と同軸状に一体となって回転するように回転軸1333に連結されており、位置決め歯1308、1312及び1316を具備している。位置決めラチェット1304及びこれに付随する回転部材は、戻しバネ(図示していないが、図10のバネ456に類似したもの)により時計回り方向に付勢されている。位置保持部材1332は、位置保持位置(例えば図27(A)に示す位置)と位置解除位置(例えば図27(D)に示す位置)との間で回転できるように、爪軸1334に支持された位置決め爪の形態であり、位置決め爪1332は、位置決め歯1336及び1340と、位置決め歯1340に取付けられた回動軸1342と、回動軸1342に回転自在に支持されたカムローラ1344の形態であるカムフォロアとを有する。この位置決め爪1332を位置保持位置に向けて反時計回りに付勢するように、爪バネ(図示せず)が設けられている。シフトレバー1320(通常、ワイヤ解除方向にシフト機構を動作させるために使用するもの)は、回転軸1333を中心として回転自在に支持されており、カムプレート1324を支持する回動軸1328を有する。第1の実施形態の場合と同様に、カムプレート1324全体の形状は丸みを帯びた細長い二等辺三角形である。このカムプレート1324は、バネ(図示せず)により時計回り方向に付勢されているため、シフトレバー1320の側部面1354にぶつかってカムプレート1324を図27(A)に示す位置に保持するための、半径方向に延出した位置決めタブ1350を具備している。
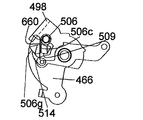
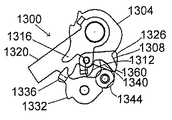
乗り手がシフトレバー1320を図27(A)に示す定位置または第1の解除部材位置から反時計回りに回転させると、図27(B)に示すように、カムプレート1324の基部面1326がまずカムローラ1344に接触する。さらにシフトレバー1320が回転することにより、カムプレート1324がカムローラ1344に押付けられるため、図27(C)に示すように、位置決め爪1332が時計回り方向に回転する。爪歯1340の先端が位置決め歯1312の先端を通過すると、図27(D)に示すように、位置決め歯1316が爪歯1336にぶつかって位置決めラチェット1304及びこれに付随する回転部材の非制御回転を阻止するまで、位置決めラチェット1304(及びこれに付随する回転部材)が戻しバネの付勢力にしたがって時計回り方向に回転する。
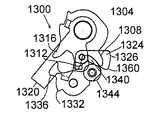
シフトレバー1320が第2の解除部材位置(例えば、図27(F)に示すシフトレバー1320の動作範囲終点)に向けて反時計回りに回転を続ける間、カムプレート1324の丸みを帯びた角部1360が図27(D)に示すように、カムローラ1344を通過するため、カムローラ1344によって、カムプレート1324は図27(E)に示すように反時計回り方向に回転する。これにより、位置決め爪1332が反時計回りに回転して、爪歯1336が位置決め歯1316から遠ざかる方向に移動し、爪歯1340が位置決め歯1308に係合する。こうして、位置決めラチェット1304及びこれに付随する回転部材は、自転車変速機を所望状態に固定するように位置決められる。この後、シフトレバー1320は、図27(G)及び図27(H)に示すように、第1の解除部材位置に復帰することができる。
シフト操作を制御するために位置決め爪及び位置決めラチェットを用いる周知のシステムにしたがってこのシステムを操作した場合、爪歯1340は、図27(F)に示すシフトレバー1320が動作範囲終点(第2の解除部材位置)に到達するまで、位置決め歯1312に係合した状態を続けることになる。また、位置決め爪1332は、シフトレバー1320が第1の解除部材位置に向けてある程度回転して戻るまで、爪歯1336が位置決め歯1316から遠ざかる方向に移動して爪歯1340が位置決め歯1308に係合するように反時計回り方向に回転することはない。本明細書に記載するシフト制御機構の場合、この動作は不要である。回転自在なカムプレート1324が設けられているため、シフトレバー1320が第1の解除位置に向けて戻り始める前に、シフトレバー1320がまだ反時計回り方向に回転している間にでさえ、位置決め爪1332が直ちにシフト操作を完了できるからである。さらに、カムプレート1324に類似のカムプレートが、連続してカムローラ1344に接触できるようにシフトレバー1320に追加して取付けられていれば、シフトレバー1320を図27(E)に示す位置から反時計回りにさらに回転させて、複数のシフトを実行することができる。
[シフトレバーアセンブリ]
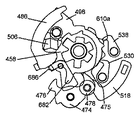
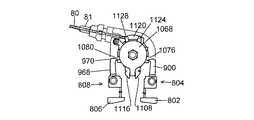
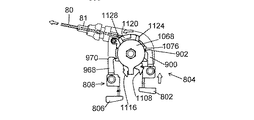
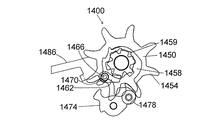
図28は、図20に示した実施形態の教示内容の幾つかを組み入れたシフトレバーアセンブリ1440を示す図である。図20に示した実施形態と同様に、カムホイール1450が、カムローラ1478を有する位置決め爪1474の操作を制御している。カムホイール1450は、位置決めラチェット1458に対して同軸状に回転自在に取付けられており、周方向に配置された複数のカム歯1454と、周方向に配置された複数のカム駆動歯1459とを具備している。カム駆動歯1462は、回動軸1466を介してシフトレバー1486に回動自在に取付けられ、バネ1470により反時計回りに付勢されている。シフトレバー1486が反時計回り方向(通常、ワイヤ解除方向)に回転すると、カム駆動爪1462は、カム駆動歯1459の1つに係合して、カムホイール1450を反時計回り方向に回転させる。すると、カム歯1454の1つがカムローラ1478に押付けられるため、位置決め爪1474が、図27(A)〜図27(D)に示す実施形態と同様に、反時計回り方向に回転する。カム歯1454がカムローラ1478を通過すると、位置決め爪1474が反時計回り方向に回転して、図27(E)に示した実施形態と同様に、シフト操作を完了する。シフトレバー1486が時計回りに回転すると、カム駆動爪1462が、これに対応するカム駆動歯1459から外れる。図27(A)〜図27(H)に示した実施形態と同様に、カムホイール1450にカム歯1454が設けられているため、シフトレバー1486が第1の解除位置に向けて戻り始める前に、また、シフトレバー1486がまだ反時計回り方向に回転している間にでさえ、位置決め爪1474は直ちにシフト操作を完了することができる。実際、シフトレバー1486をさらに反時計回りに回転させて、複数のカム歯1454を1つずつ連続的にカムローラ1478に押付けることにより、複数のシフトを実行することができる。
図28は、図20に示した実施形態の教示内容の幾つかを組み入れたシフトレバーアセンブリ1440を示す図である。図20に示した実施形態と同様に、カムホイール1450が、カムローラ1478を有する位置決め爪1474の操作を制御している。カムホイール1450は、位置決めラチェット1458に対して同軸状に回転自在に取付けられており、周方向に配置された複数のカム歯1454と、周方向に配置された複数のカム駆動歯1459とを具備している。カム駆動歯1462は、回動軸1466を介してシフトレバー1486に回動自在に取付けられ、バネ1470により反時計回りに付勢されている。シフトレバー1486が反時計回り方向(通常、ワイヤ解除方向)に回転すると、カム駆動爪1462は、カム駆動歯1459の1つに係合して、カムホイール1450を反時計回り方向に回転させる。すると、カム歯1454の1つがカムローラ1478に押付けられるため、位置決め爪1474が、図27(A)〜図27(D)に示す実施形態と同様に、反時計回り方向に回転する。カム歯1454がカムローラ1478を通過すると、位置決め爪1474が反時計回り方向に回転して、図27(E)に示した実施形態と同様に、シフト操作を完了する。シフトレバー1486が時計回りに回転すると、カム駆動爪1462が、これに対応するカム駆動歯1459から外れる。図27(A)〜図27(H)に示した実施形態と同様に、カムホイール1450にカム歯1454が設けられているため、シフトレバー1486が第1の解除位置に向けて戻り始める前に、また、シフトレバー1486がまだ反時計回り方向に回転している間にでさえ、位置決め爪1474は直ちにシフト操作を完了することができる。実際、シフトレバー1486をさらに反時計回りに回転させて、複数のカム歯1454を1つずつ連続的にカムローラ1478に押付けることにより、複数のシフトを実行することができる。
さまざまな構成要素のサイズ、形状、位置または配向を所望に応じて変更することができる。図示した構成要素は直接、相互に接続または接触しているが、こうした構成要素の間に中間構造体を設けることもできる。1つの構成要素の機能を2つの構成要素で実施させることも可能であり、逆もまた可能である。一実施形態の構造及び機能を、他の実施形態に採用してもよい。すべての利点を、特定の実施態様に一度に含めなくてもよい。従来技術に比べて独自性のある各特徴は、それ単独であれ、他の特徴との組合わせであれ、その特徴(1つまたは複数)により具体化された構造的及び/または機能的概念を含めて、本出願人による発明をさらに説明する別個の記載として見なされるべきである。したがって、本発明の範囲は、本明細書内に開示された具体的構造、または特定の構造や特徴に関する明白な当初の着目点に限定されるものではない。
10 自転車
14 補助機構
50 ハンドルバー
70 フロントディレーラ
74 リアディレーラ
84 シフト制御装置
1300 シフトレバー機構
1304 位置決めラチェット
1308,1312,1316,1336,1340 位置決め歯
1320 シフトレバー
1324 カムプレート
1332 位置保持部材
1332 位置決め爪
1340 爪歯
1344 カムローラ
1400 シフトレバーアセンブリ
1450 カムホイール
1454 カム歯
1458 位置決めラチェット
1459,1462 カム駆動歯
1474 位置決め爪
1478 カムローラ
1486 シフトレバー
14 補助機構
50 ハンドルバー
70 フロントディレーラ
74 リアディレーラ
84 シフト制御装置
1300 シフトレバー機構
1304 位置決めラチェット
1308,1312,1316,1336,1340 位置決め歯
1320 シフトレバー
1324 カムプレート
1332 位置保持部材
1332 位置決め爪
1340 爪歯
1344 カムローラ
1400 シフトレバーアセンブリ
1450 カムホイール
1454 カム歯
1458 位置決めラチェット
1459,1462 カム駆動歯
1474 位置決め爪
1478 カムローラ
1486 シフトレバー
Claims (31)
- 少なくとも第1の出力位置と第2の出力位置とに移動する出力伝達部材と、
前記出力伝達部材を前記第1の出力位置及び前記第2の出力位置の一方に保持する位置保持位置と、前記出力伝達部材を前記第1の出力位置及び前記第2の出力位置のもう一方に向けて移動させることのできる位置解除位置との間を移動する位置保持部材を含む位置保持機構と、
第1の解除部材位置と第2の解除部材位置との間を移動する解除部材を含み、前記解除部材が前記第1の解除部材位置から前記第2の解除部材位置に向けて移動すると前記位置保持部材を前記位置解除位置に移動させ、前記解除部材が前記第2の解除部材位置に向けて移動し続けている間に、前記位置保持部材を前記位置保持位置に復帰させることのできる解除制御機構と、
を含む自転車用シフト制御装置。 - 前記解除制御機構が、前記解除部材に連結されたカム部材をさらに含み、
前記カム部材が、前記解除部材が前記第2の解除部材位置に向けて移動するにつれて前記位置保持部材を前記位置解除位置に移動させ、前記解除部材が前記第2の解除部材位置に向けて移動し続けている間に、前記位置保持部材を前記位置保持位置に復帰させることのできる、
請求項1に記載の装置。 - 前記解除部材が解除プレートを含む、請求項2に記載の装置。
- 前記位置保持機構が、前記位置保持部材に連結されたカムフォロアをさらに含み、
前記解除プレートが前記第2の解除部材位置に向けて移動するにつれて前記カム部材が回転するように、前記カム部材が、前記解除プレートに回転自在に連結された第1の部分と前記カムフォロアに接触するカムローブを規定している第2の部分とを有する、
請求項3に記載の装置。 - 前記カム部材が回転することにより、前記位置保持部材を前記位置保持位置に復帰させることのできる、請求項4に記載の装置。
- 前記解除部材が、手動操作式解除部材を含む、請求項2に記載の装置。
- 前記解除部材が、手動操作式解除レバーを含む、請求項6に記載の装置。
- 前記位置保持機構が、前記位置保持部材に連結されたカムフォロアをさらに含み、
前記解除レバーが前記第2の解除部材位置に向けて移動するにつれて前記カム部材が回転するように、前記カム部材が、前記手動操作式レバーに回転自在に連結された第1の部分と前記カムフォロアに接触するカムローブを規定している第2の部分とを有する、
請求項7に記載の装置。 - 前記カム部材が回転することにより、前記位置保持部材を前記位置保持位置に復帰させることのできる、請求項8に記載の装置。
- 前記解除部材が、前記カム部材を回転自在に支持している、請求項2に記載の装置。
- 前記位置保持機構が、
前記出力伝達部材と一体となって移動する位置決め歯と、
前記位置決め歯に係合する位置決め爪とを含む、
請求項10に記載の装置。 - 前記解除制御機構が、前記位置保持爪に連結されたカムフォロアをさらに含む、請求項11に記載の装置。
- 前記カムフォロアがローラを含む、請求項12に記載の装置。
- 前記解除部材が解除プレートを含み、
前記解除プレートが前記第2の解除部材位置に向けて移動するにつれて前記カム部材が回転するように、前記カム部材が、前記解除プレートに枢動自在に取付けられた第1の部分と前記ローラに接触するカムローブを規定している第2の部分とを有する、請求項13に記載の装置。 - 前記カム部材が回転することにより、前記位置保持部材を前記位置保持位置に復帰させることのできる、請求項14に記載の装置。
- 前記解除部材が、手動操作式解除部材を含む、請求項13に記載の装置。
- 前記解除部材が、手動操作式解除レバーを含む、請求項16に記載の装置。
- 前記解除レバーが前記第2の解除部材位置に向けて移動するにつれて前記カム部材が回転するように、前記カム部材が、前記手動操作式レバーに回転自在に連結された第1の部分と前記ローラに接触するカムローブを規定している第2の部分とを有する、請求項17に記載の装置。
- 前記カム部材が回転することにより、前記位置保持部材を前記位置保持位置に復帰させることのできる、請求項18に記載の装置。
- 前記カム部材がカム歯を含む、請求項2に記載の装置。
- 前記位置保持機構が、
前記出力伝達部材と一体となって移動する位置決め歯と、
前記位置決め歯に係合する位置決め爪とを含む、
請求項20に記載の装置。 - 前記位置保持機構が、前記カム歯に接触するように前記位置保持爪に支持されたカムフォロアをさらに含む、請求項21に記載の装置。
- 前記解除部材が前記第1の解除部材位置から前記第2の解除部材位置に向けて移動するにつれて、前記カム歯が前記カムフォロアに係合して、前記位置決め爪を前記位置解除位置に移動させ、前記解除部材が前記第2の解除部材位置に向けて移動し続けている間に、前記カム歯が前記カムフォロアから外れて、前記位置決め爪を前記位置保持位置に復帰させることのできる、請求項22に記載の装置。
- 前記解除部材が、解除プレートを含む、請求項23に記載の装置。
- 前記解除部材が、手動操作式解除部材を含む、請求項23に記載の装置。
- 前記解除部材が、手動操作式解除レバーを含む、請求項25に記載の装置。
- 前記カム部材が、複数の前記カム歯を含む、請求項23に記載の装置。
- 前記カム部材がカムホイールを含み、前記複数のカム歯が、前記カムホイール周囲で周方向に配置されている、請求項27に記載の装置。
- 前記カムホイールが、前記出力伝達部材と同軸状に回転する、請求項28に記載の装置。
- 前記カムフォロアがローラを含む、請求項29に記載の装置。
- 少なくとも第1の出力位置と第2の出力位置とに移動する出力伝達部材と、
前記出力伝達部材を前記第1の出力位置及び前記第2の出力位置の一方に保持する位置保持位置と、前記出力伝達部材を前記第1の出力位置及び前記第2の出力位置のもう一方に向けて移動させることのできる位置解除位置との間を移動する位置保持部材を含む位置保持機構と、
第1の解除部材位置から第2の解除部材位置に移動し、さらに第1の解除部材位置に向けて戻る解除部材を含み、前記解除部材が前記第1の解除部材位置から前記第2の解除部材位置に向けて移動すると前記位置保持部材を前記位置解除位置に移動させ、前記解除部材が前記第1の解除部材位置に向けて戻り始める前に、前記位置保持部材を前記位置保持位置に復帰させることのできる解除制御機構と、
を含む自転車用シフト制御装置。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/360,369 US8069749B2 (en) | 2002-07-05 | 2003-02-06 | Shift control device for a bicycle transmission |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004237974A true JP2004237974A (ja) | 2004-08-26 |
Family
ID=32961205
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003364153A Pending JP2004237974A (ja) | 2003-02-06 | 2003-10-24 | 自転車用変速機のシフト制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP2004237974A (ja) |
| CN (1) | CN1257081C (ja) |
| TW (1) | TWI259160B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007145296A (ja) * | 2005-11-30 | 2007-06-14 | Shimano Inc | 自転車用変速操作装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10994798B2 (en) * | 2018-08-30 | 2021-05-04 | Shimano Inc. | Operating device and base member |
-
2003
- 2003-06-25 TW TW92117325A patent/TWI259160B/zh not_active IP Right Cessation
- 2003-07-04 CN CN 03147155 patent/CN1257081C/zh not_active Expired - Fee Related
- 2003-10-24 JP JP2003364153A patent/JP2004237974A/ja active Pending
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2007145296A (ja) * | 2005-11-30 | 2007-06-14 | Shimano Inc | 自転車用変速操作装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW200415068A (en) | 2004-08-16 |
| CN1257081C (zh) | 2006-05-24 |
| CN1519165A (zh) | 2004-08-11 |
| TWI259160B (en) | 2006-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3950830B2 (ja) | 自転車用変速機の補助装置用モータユニット | |
| US8069749B2 (en) | Shift control device for a bicycle transmission | |
| EP1440878B1 (en) | Apparatus for shifting a bicycle transmission | |
| US6443032B1 (en) | Assisting apparatus for shifting a bicycle transmission | |
| TW487664B (en) | Bicycle hub transmission with a guiding member for a sun gear | |
| US6877393B2 (en) | Handgrip shifter for a bicycle | |
| TWI297655B (ja) | ||
| US6868752B2 (en) | Assisting apparatus for changing speeds in a bicycle transmission | |
| US7146874B2 (en) | Shift control device for a bicycle transmission | |
| JP2004090916A (ja) | 自転車用変速操作制御装置の操作方法 | |
| US6848336B2 (en) | Bicycle shift control device biased to a neutral position | |
| JP2003175880A (ja) | 自転車変速機変速用の補助装置 | |
| JP2003175879A (ja) | 調整式自転車ディレイラ | |
| JP2004034981A (ja) | 自転車用変速機の補助装置、自転車制御装置及び補助装置用動力保存装置 | |
| JP3634331B2 (ja) | 自転車変速機変速用の補助装置 | |
| US6640938B2 (en) | Shift assist apparatus for a bicycle | |
| JP2004237974A (ja) | 自転車用変速機のシフト制御装置 | |
| JP2004034980A (ja) | 自転車用変速機のシフト制御装置及び自転車用変速機のシフト制御装置用インジケータ装置 | |
| EP1378437B1 (en) | Shift control device for a bicycle transmission | |
| JPS63269796A (ja) | 自転車のギヤチェンジ操作装置 | |
| JP2004249970A (ja) | 自転車装置用回転制御装置及び自転車変速機操作装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20060815 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20061212 |