JP2004104130A - 多重干渉ビームを使用するレチクル焦点測定システムおよびレチクル焦点測定方法 - Google Patents
多重干渉ビームを使用するレチクル焦点測定システムおよびレチクル焦点測定方法 Download PDFInfo
- Publication number
- JP2004104130A JP2004104130A JP2003315916A JP2003315916A JP2004104130A JP 2004104130 A JP2004104130 A JP 2004104130A JP 2003315916 A JP2003315916 A JP 2003315916A JP 2003315916 A JP2003315916 A JP 2003315916A JP 2004104130 A JP2004104130 A JP 2004104130A
- Authority
- JP
- Japan
- Prior art keywords
- reticle
- plane
- beams
- reticle stage
- stage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images









Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F9/00—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically
- G03F9/70—Registration or positioning of originals, masks, frames, photographic sheets or textured or patterned surfaces, e.g. automatically for microlithography
- G03F9/7003—Alignment type or strategy, e.g. leveling, global alignment
- G03F9/7023—Aligning or positioning in direction perpendicular to substrate surface
- G03F9/7026—Focusing
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/027—Making masks on semiconductor bodies for further photolithographic processing not provided for in group H01L21/18 or H01L21/34
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
- G03F7/70725—Stages control
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Preparing Plates And Mask In Photomechanical Process (AREA)
Abstract
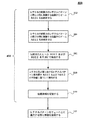
【解決手段】レチクルのパターン面の位置データを干渉計測定ビームの第1のセットに基づいて測定するステップと、レチクルステージのスキャン中にレチクルステージのマップデータを干渉計測定ビームの第2のセットに基づいて測定するステップと、レチクルのパターン面上のパターンによってウェーハを露光する間にレチクルステージを前記位置データおよび前記マップデータに基づいて制御するステップとを有する方法。
【選択図】図2A
Description
Ry=(Z2−Z1)/L
別の実施形態では信号は、2つの関連するビーム(すなわちRSZ1およびRSZ2、またはRSZ3およびRSZ4)の強度、位相、距離等に基づいて干渉測定結果を表す。前記2つの関連するビームは比較され、比較から得られた信号は、レチクルステージ202またはレチクル204のパラメータ(たとえば位置、方向、傾斜等)に相応する。
Ry=(X2−X1)/L
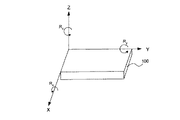
図8には、ステージ202およびレチクル204の位置を測定するために使用される、本発明の実施形態によるリソグラフィツールの一部800が示されている。この実施形態でも、ここには示されていないが、ビームRSZ1〜RSZ5,RSY1〜RSY3およびRSX1が干渉計によって形成され、検出される。この干渉計もまた、上記の208または208' と同様であるか、または別の任意の干渉計である。この実施形態には、ステージ202および/またはレチクル204に対する6つのすべてのステージ202を検出するためのビームが示されている。ビームRSZ1およびRSZ2によって、レチクル204のZおよびRyが検出される。ビームRSZ1およびRSZ5によって、レチクルのRxが検出される。ビームRSZ3およびRSZ4によって、ステージ202のZおよびRyが検出される。ビームRSX1によってステージ202のXが検出される。ビームRSY1,RSY2および/またはRSY3によって、ステージ202のYが検出される。ビームRSY2およびRSY3によって、ステージ202のRzが検出される。ビームRSY1およびRSY3によって、ステージ202のRxが検出される。これらの検出は、上記の数式、上記の数式と同様の数式、または公知である別の任意の干渉計の数式に基づいて実行される。
本発明の種々の実施形態を上記で説明したが、これらの実施形態は例として挙げられたものであり、制限するものではないことを理解されたい。当業者であれば、本発明の精神および領域から逸脱することなく、構成および詳細を種々に変更できることを理解できるであろう。したがって、本発明の範囲は上記のどの実施例によっても制限されるべきではなく、請求項および同等のものにしたがってのみ定義されるべきである。
Claims (26)
- レチクルのパターン面の位置を、干渉計測定ビームの第1のセットに基づいて測定するステップと、
レチクルステージのマップデータを、該レチクルステージのスキャン中に干渉計測定ビームの第2のセットに基づいて測定するステップと、
レチクルのパターン面上のパターンによってウェーハを露光する間に、レチクルステージを前記位置データおよび前記マップデータに基づいて制御するステップとを有することを特徴とする方法。 - 前記位置データ測定ステップは、
ビームの第1のセットの第1のビームを、レチクル上のパターンの第1の側に隣接したポイントから反射させるステップと、
ビームの第1のセットの第2のビームを、レチクル上のパターンの第2の側に隣接したポイントから反射させるステップとを有する、請求項1記載の方法。 - 前記マップデータ測定ステップは、
ビームの第2のセットの第1のビームを、レチクルステージのX-Y面に対して平行な平面内のポイントから反射させるステップと、
ビームの第2のセットの第2のビームを、レチクルステージのX-Y面に対して平行な平面内のポイントから反射させるステップとを有する、請求項1記載の方法。 - マップデータ測定ステップは、
ビームの第2のセットの第1のビームを、レチクルステージのX-Y面に対して平行な平面内のポイントから反射させるステップと、
ビームの第2のセットの第2のビームを、レチクルステージのY-Z面に対して平行な平面内のポイントから反射させるステップとを有する、請求項1記載の方法。 - マップデータ測定ステップは、
ビームの第2のセットの第1のビームを、レチクルステージのX-Y面に対して平行な平面内のポイントから反射させるステップと、
ビームの第2のセットの第2のビームを、レチクルステージのX-Y面内に配向された平面内のポイントから反射させるステップとを有する、請求項1記載の方法。 - マップデータ測定ステップは、
ビームの第2のセットの第1のビームを、レチクルステージのX-Y面に対して平行な平面内のポイントから反射させるステップと、
ビームの第2のセットの第2のビームを、レチクルステージのY-Z面内に配向された平面内のポイントから反射させるステップとを有する、請求項1記載の方法。 - マップデータ測定ステップは、
ビームの第2のセットの第1のビームを、レチクルステージのX-Y面内に配向された平面内のポイントから反射させるステップと、
ビームの第2のセットの第2のビームを、レチクルステージのX-Y面に対して平行な平面内のポイントから反射させるステップとを有する、請求項1記載の方法。 - マップデータ測定ステップは、
ビームの第2のセットの第1のビームを、レチクルステージのX-Y面内に配向された平面内のポイントから反射させるステップと、
ビームの第2のセットの第2のビームを、レチクルステージのY-Z面に対して平行な平面内のポイントから反射させるステップとを有する、請求項1記載の方法。 - マップデータ測定ステップは、
ビームの第2のセットの第1のビームを、レチクルステージのX-Y面内に配向された平面内のポイントから反射させるステップと、
ビームの第2のセットの第2のビームを、レチクルステージのX-Y面内に配向された平面内のポイントから反射させるステップとを有する、請求項1記載の方法。 - マップデータ測定ステップは、
ビームの第2のセットの第1のビームを、レチクルステージのX-Y面内に配向された平面内のポイントから反射させるステップと、
ビームの第2のセットの第2のビームを、レチクルステージのY-Z面内に配向された平面内のポイントから反射させるステップとを有する、請求項1記載の方法。 - 位置データ測定ステップは、レチクルのパターン面のZ方向における自由度を検出するステップと、該レチクルのパターン面のRy回転に対する自由度を検出するステップとを有し、
Z方向はレチクルのパターン面に対して垂直であり、
Ry回転はレチクルステージのスキャン軸を中心としている、請求項1記載の方法。 - レチクル焦点面を位置データ測定ステップに基づいて検出するステップを有する、請求項1記載の方法。
- 前記レチクル焦点面を、測定されたレチクルステージの前記マップデータと相関付けるステップと、
レチクルのパターン面の位置を前記相関ステップに基づいて、ウェーハの露光中にトラッキングするステップとを有する、請求項12記載の方法。 - 所定のレチクル平面を位置データ測定ステップに基づいて検出するステップを有する、請求項1記載の方法。
- 前記所定のレチクル平面を、レチクルステージの前記測定されたマップデータと相関付けするステップと、
レチクルのパターン面の位置を前記相関ステップに基づいて、ウェーハの露光中にトラッキングするステップとを有する、請求項14記載の方法。 - 位置データ測定ステップは、較正の合間に1回実行される、請求項1記載の方法。
- 位置データ測定ステップは、周期的に較正の合間に実行される、請求項1記載の方法。
- 位置データ測定ステップは連続的に実行される、請求項1記載の方法。
- 第1の干渉計を使用して、レチクルステージ上に取り付けられたレチクルの平面を検出するステップと、
レチクルステージのスキャン中に、第2の干渉計を使用してレチクルステージの位置を検出するステップと、
前記平面をレチクルステージの位置と相関付けるステップと、
レチクルステージを露光プロセス中に前記相関ステップに基づいて制御するステップとを有することを特徴とする方法。 - レチクルを保持する可動のレチクルステージと、二重干渉計装置と、記憶装置とが設けられており、
前記レチクルはパターン面を有し、
前記二重干渉計装置は、干渉計ビームの第1のセットを投射して、前記レチクルのパターン面から前記第1のセットを検出し、干渉計ビームの第2のセットを投射して、前記レチクルステージから前記第2のセットを検出し、
前記記憶装置は、干渉計ビームの第1のセットによって測定されたレチクルの位置データと、干渉計ビームの第2のセットによって測定されたレチクルステージのマップデータとを記憶することを特徴とするシステム。 - コントローラが設けられており、
前記コントローラは、ウェーハ上にレチクルパターンが露光される間、記憶された前記マップデータおよび記憶された前記位置データに基づいてレチクルステージを制御する、請求項20記載のシステム。 - レチクルはレチクルステージに裏面取り付けされている、請求項20記載のシステム。
- レチクルはレチクルステージに片面取り付けされている、請求項20記載のシステム。
- レチクルはレチクルステージに前面取り付けされている、請求項20記載のシステム。
- 前記二重干渉計装置は、2つの干渉計部を備えた単一の構造を有する、請求項20記載のシステム。
- 二重干渉計装置は2つの干渉計を有する、請求項20記載のシステム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US10/235,499 US6934005B2 (en) | 2002-09-06 | 2002-09-06 | Reticle focus measurement method using multiple interferometric beams |
| US10/417,257 US6850330B2 (en) | 2002-09-06 | 2003-04-17 | Reticle focus measurement system using multiple interferometric beams |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2004104130A true JP2004104130A (ja) | 2004-04-02 |
| JP3831720B2 JP3831720B2 (ja) | 2006-10-11 |
Family
ID=31720202
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2003315916A Expired - Fee Related JP3831720B2 (ja) | 2002-09-06 | 2003-09-08 | 多重干渉ビームを使用するレチクル焦点測定システムおよびレチクル焦点測定方法 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US7016051B2 (ja) |
| EP (1) | EP1396757A3 (ja) |
| JP (1) | JP3831720B2 (ja) |
| KR (1) | KR100670072B1 (ja) |
| CN (1) | CN1510525A (ja) |
| SG (1) | SG107671A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010521809A (ja) * | 2007-03-14 | 2010-06-24 | エーエスエムエル ネザーランズ ビー.ブイ. | デバイス製造方法、リソグラフィ装置およびコンピュータプログラム |
| WO2011016254A1 (ja) * | 2009-08-07 | 2011-02-10 | 株式会社ニコン | 移動体装置、露光装置及び露光方法、並びにデバイス製造方法 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7259834B2 (en) * | 2004-10-18 | 2007-08-21 | Nikon Corporation | Method and apparatus having a reticle stage safety feature |
| US7433017B2 (en) | 2004-12-22 | 2008-10-07 | Nikon Corporation | Method of measuring the position of a mask surface along the height direction, exposure device, and exposure method |
| US7853067B2 (en) | 2006-10-27 | 2010-12-14 | Asml Holding N.V. | Systems and methods for lithographic reticle inspection |
| CN101493655B (zh) * | 2008-01-21 | 2011-07-20 | 联华电子股份有限公司 | 曝光方法 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5200798A (en) * | 1990-07-23 | 1993-04-06 | Hitachi, Ltd. | Method of position detection and the method and apparatus of printing patterns by use of the position detection method |
| JPH09180989A (ja) | 1995-12-26 | 1997-07-11 | Toshiba Corp | 露光装置および露光方法 |
| JPH10335234A (ja) * | 1997-05-29 | 1998-12-18 | Nikon Corp | 投影露光装置 |
| IL135139A0 (en) | 1997-09-19 | 2001-05-20 | Nikon Corp | Stage apparatus, scanning type exposure apparatus, and device produced with the same |
| AU1053199A (en) | 1997-11-14 | 1999-06-07 | Nikon Corporation | Exposure apparatus and method of manufacturing the same, and exposure method |
| AU2549899A (en) | 1998-03-02 | 1999-09-20 | Nikon Corporation | Method and apparatus for exposure, method of manufacture of exposure tool, device, and method of manufacture of device |
| JPH11307436A (ja) * | 1998-04-27 | 1999-11-05 | Fujitsu Ltd | 投影露光装置及びレチクル及びレチクルの位置決め方法 |
| US6768124B2 (en) * | 1999-10-19 | 2004-07-27 | Nikon Corporation | Reticle-focus detector, and charged-particle-beam microlithography apparatus and methods comprising same |
| JP3728180B2 (ja) * | 2000-06-01 | 2005-12-21 | キヤノン株式会社 | 干渉計搭載ステージ |
| AU2003252349A1 (en) * | 2002-07-31 | 2004-02-16 | Nikon Corporation | Position measuring method, position control method, exposure method and exposure apparatus, and device manufacturing method |
| US6934005B2 (en) * | 2002-09-06 | 2005-08-23 | Asml Holding N.V. | Reticle focus measurement method using multiple interferometric beams |
-
2003
- 2003-09-03 EP EP03019984A patent/EP1396757A3/en not_active Withdrawn
- 2003-09-03 SG SG200305649A patent/SG107671A1/en unknown
- 2003-09-05 CN CNA03155430XA patent/CN1510525A/zh active Pending
- 2003-09-06 KR KR1020030062321A patent/KR100670072B1/ko not_active IP Right Cessation
- 2003-09-08 JP JP2003315916A patent/JP3831720B2/ja not_active Expired - Fee Related
-
2004
- 2004-10-15 US US10/965,026 patent/US7016051B2/en not_active Expired - Fee Related
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010521809A (ja) * | 2007-03-14 | 2010-06-24 | エーエスエムエル ネザーランズ ビー.ブイ. | デバイス製造方法、リソグラフィ装置およびコンピュータプログラム |
| WO2011016254A1 (ja) * | 2009-08-07 | 2011-02-10 | 株式会社ニコン | 移動体装置、露光装置及び露光方法、並びにデバイス製造方法 |
| US9164400B2 (en) | 2009-08-07 | 2015-10-20 | Nikon Corporation | Movable body apparatus, exposure apparatus, exposure method, and device manufacturing method |
| US9946171B2 (en) | 2009-08-07 | 2018-04-17 | Nikon Corporation | Movable body apparatus, exposure apparatus, exposure method, and device manufacturing method |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1396757A2 (en) | 2004-03-10 |
| KR100670072B1 (ko) | 2007-01-18 |
| KR20040022401A (ko) | 2004-03-12 |
| EP1396757A3 (en) | 2008-12-17 |
| US20050062980A1 (en) | 2005-03-24 |
| CN1510525A (zh) | 2004-07-07 |
| JP3831720B2 (ja) | 2006-10-11 |
| SG107671A1 (en) | 2004-12-29 |
| US7016051B2 (en) | 2006-03-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR100775544B1 (ko) | Z 위치 에러/변동들과 기판 테이블 평탄도를 결정하는리소그래피 장치 및 방법 | |
| US6538721B2 (en) | Scanning exposure apparatus | |
| US5502311A (en) | Method of and apparatus for detecting plane position | |
| JP4332486B2 (ja) | 時間を節約する高さ測定を用いた、基板にマスク・パターンを繰り返し投影する方法および装置 | |
| KR101297231B1 (ko) | 리소그래피 장치, 캘리브레이션 방법, 디바이스 제조 방법및 컴퓨터 프로그램 제품 | |
| TWI424284B (zh) | 微影裝置、校正微影裝置之方法及器件製造方法 | |
| JPH09275072A (ja) | 移動鏡の真直度誤差補正方法及びステージ装置 | |
| JP4434372B2 (ja) | 投影露光装置およびデバイス製造方法 | |
| JPH1145846A (ja) | 走査型露光方法及び装置 | |
| JP2008021748A (ja) | 露光装置 | |
| JP5147865B2 (ja) | デバイス製造方法、リソグラフィ装置およびコンピュータプログラム | |
| JP3831720B2 (ja) | 多重干渉ビームを使用するレチクル焦点測定システムおよびレチクル焦点測定方法 | |
| JPH09223650A (ja) | 露光装置 | |
| US6934005B2 (en) | Reticle focus measurement method using multiple interferometric beams | |
| JPH11186129A (ja) | 走査型露光方法及び装置 | |
| JP2009188408A (ja) | 露光設定を決定するための方法、リソグラフィ露光装置、コンピュータプログラムおよびデータキャリア | |
| JPH1050600A (ja) | 投影露光方法及び投影露光装置 | |
| JPH1083954A (ja) | 露光装置 | |
| JP2006228890A (ja) | 位置合わせ方法及び露光装置 | |
| JPH09199573A (ja) | 位置決めステージ装置およびこれを用いた露光装置 | |
| US11586116B2 (en) | Measurement apparatus, exposure apparatus, and article manufacturing method | |
| JP2023077924A (ja) | 露光装置、露光方法、および物品製造方法 | |
| TWI424516B (zh) | 放置基板之方法、傳送基板之方法、支撐系統及微影投影裝置 | |
| US20050286050A1 (en) | Real-time through lens image measurement system and method | |
| JP2009182063A (ja) | 露光方法及び装置、並びにデバイス製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20040401 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050705 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050713 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20051011 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20051014 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051128 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060615 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060714 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20060904 |
|
| A072 | Dismissal of procedure [no reply to invitation to correct request for examination] |
Free format text: JAPANESE INTERMEDIATE CODE: A072 Effective date: 20070124 |
|
| S631 | Written request for registration of reclamation of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313631 |
|
| S633 | Written request for registration of reclamation of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313633 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |