JP2004009172A - 多関節ロボットおよびその制御装置 - Google Patents
多関節ロボットおよびその制御装置 Download PDFInfo
- Publication number
- JP2004009172A JP2004009172A JP2002163511A JP2002163511A JP2004009172A JP 2004009172 A JP2004009172 A JP 2004009172A JP 2002163511 A JP2002163511 A JP 2002163511A JP 2002163511 A JP2002163511 A JP 2002163511A JP 2004009172 A JP2004009172 A JP 2004009172A
- Authority
- JP
- Japan
- Prior art keywords
- control
- axis
- robot
- tool
- axes
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Abandoned
Links
Images








Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10T—TECHNICAL SUBJECTS COVERED BY FORMER US CLASSIFICATION
- Y10T74/00—Machine element or mechanism
- Y10T74/20—Control lever and linkage systems
- Y10T74/20207—Multiple controlling elements for single controlled element
- Y10T74/20305—Robotic arm
Abstract
【解決手段】一部の軸(第1軸、第2軸)を共有し、軸(第1軸、第2軸)に独立して接続された複数の軸(4A軸、4B軸)の先にそれぞれハンドを取り付けることが出来る1台で複数のハンドを備えた多関節ロボットであって、指定されたハンドをCP制御し、指定されていないハンドをPTP制御に切り替える制御装置を備えた多関節ロボット。
【選択図】 図1
Description
【産業上の利用分野】
本発明は、1台で複数のツールを装備する多関節ロボットおよびその制御装置に関する。
【0002】
【従来の技術】
通常の多関節ロボットは、ツールを一つだけ持っているのが普通である。図7は、従来のハンドリングロボットの一般的な軸構成を示す概略図である。3次元上の位置と、一平面内でのツールの姿勢を任意に決定するには、このように第1軸〜第4軸の最低4軸を必要とする。このロボットは、1つのツールを第4軸に搭載することが出来る。
【0003】
図8は、搬入ステーション、加工ステーション、搬出ステーション、ハンドリングロボットからなる、あるワーク加工システムの概略図である。搬入ステーション1には未加工ワークが搬入される。加工ステーション2は投入されたワークに対して加工を行なう。搬出ステーション3は加工済みワークを搬出する。ハンドリングロボット4のツール5は、各ステーション間でワークをハンドリングして受け渡す役割をする。
【0004】
図9は、図8のワーク加工システムにおいて、図7のような1台のロボットが一つのツールをもっている場合の、1サイクルでのロボットの動作例の説明図である。この場合、まず、▲1▼加工ステーション2から加工済みワーク6を取り出し、▲2▼搬出ステーション3へ加工済みワーク6を搬出してから、▲3▼搬入ステーション1より未加工ワーク7を取り出し、▲4▼それを加工ステーション2へ投入する、というサイクルで実現することになる。
【0005】
従来の多関節ロボットは、ツールを一つだけ持っているのが普通であるが、一台のロボットに二つ以上のツールを搭載して独立して制御させれば、作業効率が向上する。
【0006】
【発明が解決しようとする課題】
しかしながら、1台のロボットで二つのツールの位置と一平面内の姿勢をそれぞれ制御しようとすると、単純に考えると4軸×2=計8軸が必要となる。しかしそれでは、ロボットが大きく重くなってしまい、製作コストも高くなる。
【0007】
そこで、本発明は、1台のロボットに2つ以上のツールを搭載し、一部の軸を共有することにより、軸数を削減し、ロボットを軽量化し、製作コストを低減し、作業効率の向上を図ることが出来る多関節ロボットおよびその制御装置を提供することを目的とする。
【0008】
【課題を解決するための手段】
本発明の多関節ロボットは、一部の軸を共有し、前記軸に独立して接続された複数の軸の先にそれぞれツールを取り付けることが出来る1台で複数のツールを備えた多関節ロボットであって、指定されたツールを位置制御または位置および姿勢制御しながら補間制御し、指定されていないツールを目標位置の軸角度へ指令を均等払い出し制御する制御装置を備えたことを特徴とする。
【0009】
また、本発明の前記多関節ロボットの制御装置は、前記多関節ロボットの制御装置であって、各軸の角度に相当する情報を目標位置として取得する手段と、複数のツールのうち一つを、位置制御または位置および姿勢制御しながらの補間制御の対象として選択する手段と、前記選択されたツールの順次移動すべき通過点を前記補間制御にて決定する手段と、前記決定された通過点へ前記選択されたツールの制御点を移動させるための各軸位置を逆変換演算によって決定する手段と、前記選択されたツールの制御点移動に関係しない軸については、目標位置の軸角度へ指令を均等払い出し制御する手段とを有することを特徴とする。
【0010】
前記多関節ロボットの制御装置は、前記選択されたツールの制御点移動に関係しない軸については、動作指令を生成しないようにする手段を備えることができる。
【0011】
【発明の実施の形態】
図1は、本発明の1台で2つのツールを装備することが出来る多関節ロボットの軸構成の一例を示す図である。図7に示す従来のロボットを2台用意すると、軸数は4×2の8軸となってしまうが、図1に示す本発明の多関節ロボットでは、このように第1軸と第2軸を共有することによって、全体を6軸で構成することが出来る。ツールを装備するフランジを、それぞれ第1フランジ、第2フランジとする。3A軸および3B軸は図7に示す従来のロボットの第3軸に、4A軸および4B軸は第4軸にそれぞれ相当する。
【0012】
第1フランジ側は、第1軸、第2軸、3A軸および4A軸からなり、図7に示す従来の4軸ロボットによって等価に制御されると考えることができ、第2フランジ側も、同様に、第1軸、第2軸、3B軸および4B軸によって制御されると考えることが出来る。このように図1に示すロボットを使用することによって、1台に2つのツールを持たせたロボットによるハンドリングシステムを構築することが出来る。
【0013】
図2は、図8のワーク加工システムにおいて、図1のような1台のロボットに2つのツールを持たせ、それぞれを独立に制御できる場合の、1サイクルでのロボットの動作を示す図で、図8と同一の部材には同一の符号を付している。
【0014】
図2において、一方のツール8に未加工ワーク7を把持した状態で、加工ステーション2へ向かい、▲1▼加工済みワーク6を他方のツール9で取り出してから、▲2▼続けて未加工ワーク7を一方のツール8で加工ステーション2に投入し、▲3▼搬出ステーション3へ加工済みワーク6を搬出する、というサイクルを実現することが出来る。▲4▼次のサイクルで一方のツール8で未加工ワーク7を把持し、▲1▼の動作に戻る。
【0015】
図2の本発明のシステムでは、図9の従来のシステムが▲4▼のステップからワークの加工が行なわれるのに比べ、▲2▼のステップからワークの加工が開始でき、ワーク加工中に加工済みワークの搬出と次のワークの搬入準備を行なえるため、サイクルタイムを短縮することが出来る。
【0016】
ところで、このようなハンドリングシステムにおいて、ワークの正確な搬入/搬出のためには、直線補間などの、ツールの位置・姿勢を制御する、いわゆるCP制御が必要となる。ところが、図1のように軸を構成した場合、第1軸と第2軸を共有していることから、2つのツールの両方を同時にCP制御することは出来ない。したがって、このようなロボットの補間制御をロボットの各軸を目標角度へ均等に払い出すという、いわゆるPTP制御で動作させる場合、ロボットとステーションの据付位置が制約されてしまう。
【0017】
そこで、本発明は、複数のツールを制御するロボットにおいて、選択したツールのみをCP制御の対象とするので、補間制御が必要な作業を行なう側のツールを状況に応じて選択することにより、最小限の軸構成のロボットで、複数のツールを有効に活用することが出来る。
【0018】
例えば、前記のような、ワークの搬入/搬出を繰り返すシステムにおいて、図1のロボットに2つのツールを持たせ、ワークをステーションに搬入または搬出する方のツールでCP制御を行うように制御を切り替えることにより、6軸のロボットで、4軸ロボット×2台と同等の作業を実現することが出来る。
【0019】
以下に、本発明の制御の一実施例を図に基づいて説明する。
【0020】
図3は、本発明のロボットの制御を実施するためのシステムの一実施例を示すブロック図である。図3において、11は教示部、12は教示データ格納エリア、13はパラメータ格納エリア、14は補間演算部、15は駆動部である。
【0021】
教示データ格納エリア12に格納されている教示データの一例を下記に示す。
【0022】
START
MOVJC000
MOVLC001FRG=1TOOL=3
MOVLC002FRG=1TOOL=3
MOVJC003
MOVLC004FRG=2TOOL=4
MOVLC005FRG=2TOOL=4
MOVJC006
END
ここで、MOVJとは、PTP制御で目標点へ動作することを示す移動命令であり、MOVLとは、CP制御で目標点へ動作することを示す移動命令である。C000〜C006は、各移動命令における目標点での各軸角度情報を示すインデックスであり、これによって各移動命令の目標点の各軸角度を得ることが出来る。FRGで指定された番号は、補間制御の対象とするフランジ番号を表している。TOOLで指定された番号は、ツールファイル番号を表しており、フランジから各ツール制御点までの位置と、ツール座標の姿勢を表したツールファイルへのインデックスとなっている。
【0023】
別の例として、FRGの指定は教示データに対して行なわず、TOOLで指定されたツールファイル番号に、各フランジ番号を関連付けておくという方法もある。
【0024】
図4および図5は、図3に示す補間演算部14における本発明の補間制御方法の処理に関するフローチャートの一例を示すもので、101〜106、201〜207の数値はステップ番号を示す。
【0025】
処理は大きく2つの処理に分かれている。図4に示した「先読み処理」と図5に示した「カレント処理」である。
【0026】
先読み処理は、実際にロボットを動作させるより前に処理され、移動に必要な情報を、図示されない内部格納エリアに格納しておく。
【0027】
カレント処理は、実際にロボットを補間制御しながら動作させるための指令を生成する処理であり、演算周期毎に処理される。
【0028】
<先読み処理>
ステップ101:教示データ格納エリア12から移動命令情報を読み取り、必要な移動時間や加減速時間を求めておく。移動時間は、加減速を行わない場合の演算周期の回数として求め、分割数Nへセットする。
【0029】
ステップ102:移動命令がMOVJであるかどうかを判定し、MOVJならば、処理を終了する。そうでない(MOVLなどの補間命令)であれば、ステップ103へ、処理を移行する。
【0030】
ステップ103:補間制御の対象とするフランジを確認する。選択されるフランジは、教示データ格納エリア12に格納されている教示データより読み取る。
【0031】
ステップ104:ステップ103で選択された制御対象フランジが、第1フランジであれば、ステップ105へ実行を移す。第2フランジであれば、ステップ106へ実行を移す。
【0032】
ステップ105:第3軸として、3A軸を、第4軸として、4A軸を対応させ、3B軸、4B軸は、それぞれf1軸、f2軸(均等払い出し制御軸)として対応させ、制御フランジ番号=1として、終了する。
【0033】
ステップ106:第3軸として、3B軸を、第4軸として、4B軸を対応させ、3A軸、4A軸は、それぞれf1軸、f2軸として対応させ、制御フランジ番号=2として、終了する。
【0034】
<カレント処理>
ステップ201:補間パス上の進行度を表すパラメータ(K)を0クリアする。
【0035】
ステップ202:Kを更新する。このKの更新の仕方により、速度や加減速が制御される。例えば、1ずつ増加する場合、指令速度での等速運動となる。Kを、0.2、0.4、0.6、・・・と増加させていくと、等加速度運動となる。
【0036】
ステップ203:移動命令がMOVJであるかどうかを判定し、MOVJならば、ステップ204へ、そうでない(MOVLなどの補間命令)であれば、ステップ205へ、処理を移行する。
【0037】
ステップ204:θ=θs+K/N(θe−θs)の、θに対応する軸角度へ全軸を動作させる。ここで、θs:始点での軸角度、θe:終点での軸角度である。その後、ステップ207へ移行する。
【0038】
ステップ205:P=Ps+K/N(Pe−Ps)の、P(今回演算周期での目標位置)に対応する直交位置を求め、その位置に対して、制御フランジ番号の示すフランジの制御点がPに来るような、第1軸〜第4軸の各軸角度を、逆変換して求める。ここで、Ps:始点位置、Pe:終点位置である。その後、ステップ206へ移行する。
【0039】
ステップ206:θ=θs+K/N(θe−θs)の、θに対応する軸角度へf1軸、f2軸を動作させる。その後、ステップ207へ移行する。
【0040】
ステップ205:移動時間:Nと、Kを比較する。N>Kであれば、ステップS202へジャンプする。N≦Kならば、終了する。
【0041】
このようにして、選択されているフランジに応じて、補間制御の対象とする軸を置き換えることにより、第1フランジ、第2フランジの何れかについて、補間制御を行なうことが出来る。
【0042】
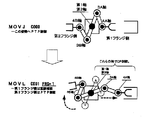
図6は、この処理を用いて図1のロボットを制御した場合の、ロボットの動作の様子を示すものである。
【0043】
ここでは、ワークを真っ直ぐに加工ステーションへ投入するために、第1フランジ側について直線補間制御が必要である。
【0044】
教示データ「MOVLC001FRG=1」は、インデックスC001に示された各軸角度を目標姿勢として、第1フランジ側(FRG=1)を補間制御対象として、直線補間(MOVL)させることを示している。この場合、第1軸、第2軸、3A軸、4A軸の計4軸にて、第1フランジ側を直線補間制御し、指定されていない第2フランジ側の3B軸、4B軸は、目標角度へのPTP制御を行う。
【0045】
こうすることにより、図1のようなロボットを用いて、ワークを取り出したり投入したりする側のフランジに対してCP制御を行うことにより、ワークを正確に搬送することが出来るため、4軸ロボット×2台分と同等の作業を、6軸のロボットによって行なわせることが可能となる。
【0046】
ここでは、この発明をある程度詳細にその最も好ましい実施態様について説明したが、その好ましい実施態様の説明は、構成の詳細な部分についての変形、特許請求の範囲に記載された本発明の精神に反しない限りでの様々な変形、あるいはそれらを組み合わせた物に変更することが出来ることは明らかである。
【0047】
例えば、ここでは、2つのフランジを持つロボットを示したが、さらに軸を追加して3つ以上のフランジを搭載したロボットの場合でも、その中の一つのフランジを選択してCP制御し、それ以外はPTP制御することによって、同じ効果が得られる。
【0048】
【発明の効果】
以上述べたように、本発明によれば、複数のツールを制御する1台のロボットを用いて、任意のツールをCP制御することが出来る。よって、1台のロボットで、複数のロボットを同時に使用するのと同じような効果が得られるため、サイクルタイムを短縮でき、作業効率を向上させることができる。
【0049】
また、本発明によれば、1台のロボットに2つ以上のツールを搭載し、一部の軸を共有することにより、軸数を削減し最小限の軸構成でロボットを構築すればよいので、ロボットを小型化、軽量化することが出来、より低コストなシステムを構築することが出来る。
【図面の簡単な説明】
【図1】本発明のハンドリングロボットの軸構成の一例を示したものである。
【図2】本発明の2つのツールを装備したハンドリングロボットの1サイクルでの動作を示す図である。
【図3】本発明のロボットの制御を実施するためのシステムの一実施例を示すブロック図である。
【図4】本発明の一実施例における補間制御方法の処理の先読み処理に関するフローチャートの一例を示したものである。
【図5】本発明の一実施例における補間制御方法の処理のカレント処理に関するフローチャートの一例を示したものである。
【図6】ロボットが2つのツールを搭載している場合の、図8のワーク加工システムにおける、1サイクルでのロボットの動作例を示したものである。
【図7】従来のハンドリングロボットの一般的な軸構成を示す概略図である。
【図8】搬入ステーション、加工ステーション、搬出ステーション、ハンドリングロボットからなるワーク加工システムの一例を示す概略図である
【図9】図8のワーク加工システムにおける図7に示すロボットの1サイクルでの動作例の説明図である。
【符号の説明】
1 搬入ステーション
2 加工ステーション
3 搬出ステーション
4 ハンドリングロボット
5 ツール
6 加工済みワーク
7 未加工ワーク
8 一方のツール
9 他方のツール
11教示部
12 教示データ格納エリア
13 パラメータ格納エリア
14 補間演算部
15 駆動部
Claims (3)
- 一部の軸を共有し、前記軸に独立して接続された複数の軸の先にそれぞれツールを取り付けることが出来る1台で複数のツールを備えた多関節ロボットであって、
指定されたツールを位置制御または位置および姿勢制御しながら補間制御し、指定されていないツールを目標位置の軸角度へ指令を均等払い出し制御する制御装置を備えたことを特徴とする多関節ロボット。 - 請求項1記載の多関節ロボットの制御装置であって、
各軸の角度に相当する情報を目標位置として取得する手段と、
複数のツールのうち一つを、位置制御または位置および姿勢制御しながらの補間制御の対象として選択する手段と、
前記選択されたツールの順次移動すべき通過点を前記補間制御にて決定する手段と、
前記決定された通過点へ前記選択されたツールの制御点を移動させるための各軸位置を逆変換演算によって決定する手段と、
前記選択されたツールの制御点移動に関係しない軸については、目標位置の軸角度へ指令を均等払い出し制御する手段とを有することを特徴とする多関節ロボットの制御装置。 - 前記選択されたツールの制御点移動に関係しない軸については、動作指令を生成しないようにする手段を有することを特徴とする請求項2記載の多関節ロボットの制御装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002163511A JP2004009172A (ja) | 2002-06-04 | 2002-06-04 | 多関節ロボットおよびその制御装置 |
| PCT/JP2003/006556 WO2003101676A1 (fr) | 2002-06-04 | 2003-05-26 | Robot a articulations multiples et dispositif de commande associe |
| KR1020047019696A KR100774077B1 (ko) | 2002-06-04 | 2003-05-26 | 다관절 로봇 및 그 제어 장치 |
| US10/516,453 US7363092B2 (en) | 2002-06-04 | 2003-05-26 | Multi-joint robot and control device thereof |
| TW092114942A TW200307593A (en) | 2002-06-04 | 2003-06-02 | Multi-joint robot and control device thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002163511A JP2004009172A (ja) | 2002-06-04 | 2002-06-04 | 多関節ロボットおよびその制御装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2004009172A true JP2004009172A (ja) | 2004-01-15 |
Family
ID=29706636
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002163511A Abandoned JP2004009172A (ja) | 2002-06-04 | 2002-06-04 | 多関節ロボットおよびその制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7363092B2 (ja) |
| JP (1) | JP2004009172A (ja) |
| KR (1) | KR100774077B1 (ja) |
| TW (1) | TW200307593A (ja) |
| WO (1) | WO2003101676A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5829313B1 (ja) * | 2014-06-25 | 2015-12-09 | ファナック株式会社 | シミュレーションを用いたオフライン教示装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008100292A (ja) * | 2006-10-17 | 2008-05-01 | Toshiba Mach Co Ltd | ロボットシステム |
| CN103620415B (zh) | 2011-06-28 | 2015-03-04 | 株式会社安川电机 | 机器人手和机器人 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07299775A (ja) * | 1994-05-11 | 1995-11-14 | Daitoron Technol Kk | 基板搬送ロボット |
| JP2000072248A (ja) * | 1998-08-27 | 2000-03-07 | Rorze Corp | 基板搬送装置 |
| JP2000077499A (ja) * | 1998-09-03 | 2000-03-14 | Dainippon Screen Mfg Co Ltd | 基板処理装置 |
| JP2000506789A (ja) * | 1996-03-22 | 2000-06-06 | ジェンマーク オートメーション インコーポレイテッド | 多自由度ロボット |
| JP2000183128A (ja) * | 1998-12-17 | 2000-06-30 | Komatsu Ltd | ワーク搬送装置の制御装置 |
| JP2001274218A (ja) * | 2000-03-23 | 2001-10-05 | Sankyo Seiki Mfg Co Ltd | ダブルアーム型ロボット |
Family Cites Families (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3890552A (en) * | 1972-12-29 | 1975-06-17 | George C Devol | Dual-armed multi-axes program controlled manipulators |
| JPS6027906A (ja) * | 1983-07-27 | 1985-02-13 | Mitsubishi Heavy Ind Ltd | ロボツト |
| JPH0371887U (ja) * | 1989-11-17 | 1991-07-19 | ||
| US6121743A (en) * | 1996-03-22 | 2000-09-19 | Genmark Automation, Inc. | Dual robotic arm end effectors having independent yaw motion |
| US6752584B2 (en) * | 1996-07-15 | 2004-06-22 | Semitool, Inc. | Transfer devices for handling microelectronic workpieces within an environment of a processing machine and methods of manufacturing and using such devices in the processing of microelectronic workpieces |
| KR20000014795A (ko) * | 1998-08-25 | 2000-03-15 | 윤종용 | 직교좌표 이송장치의 직선보간 방법 |
| KR20000042618A (ko) * | 1998-12-26 | 2000-07-15 | 윤종용 | 원통좌표계로봇 |
| US6845295B2 (en) * | 2002-03-07 | 2005-01-18 | Fanuc Robotics America, Inc. | Method of controlling a robot through a singularity |
-
2002
- 2002-06-04 JP JP2002163511A patent/JP2004009172A/ja not_active Abandoned
-
2003
- 2003-05-26 US US10/516,453 patent/US7363092B2/en not_active Expired - Fee Related
- 2003-05-26 KR KR1020047019696A patent/KR100774077B1/ko not_active IP Right Cessation
- 2003-05-26 WO PCT/JP2003/006556 patent/WO2003101676A1/ja active Application Filing
- 2003-06-02 TW TW092114942A patent/TW200307593A/zh unknown
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07299775A (ja) * | 1994-05-11 | 1995-11-14 | Daitoron Technol Kk | 基板搬送ロボット |
| JP2000506789A (ja) * | 1996-03-22 | 2000-06-06 | ジェンマーク オートメーション インコーポレイテッド | 多自由度ロボット |
| JP2000072248A (ja) * | 1998-08-27 | 2000-03-07 | Rorze Corp | 基板搬送装置 |
| JP2000077499A (ja) * | 1998-09-03 | 2000-03-14 | Dainippon Screen Mfg Co Ltd | 基板処理装置 |
| JP2000183128A (ja) * | 1998-12-17 | 2000-06-30 | Komatsu Ltd | ワーク搬送装置の制御装置 |
| JP2001274218A (ja) * | 2000-03-23 | 2001-10-05 | Sankyo Seiki Mfg Co Ltd | ダブルアーム型ロボット |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5829313B1 (ja) * | 2014-06-25 | 2015-12-09 | ファナック株式会社 | シミュレーションを用いたオフライン教示装置 |
| CN105312776A (zh) * | 2014-06-25 | 2016-02-10 | 发那科株式会社 | 使用了模拟的离线示教装置 |
| US9895801B2 (en) | 2014-06-25 | 2018-02-20 | Fanuc Corporation | Offline teaching device using simulation |
Also Published As
| Publication number | Publication date |
|---|---|
| US20050204848A1 (en) | 2005-09-22 |
| US7363092B2 (en) | 2008-04-22 |
| WO2003101676A1 (fr) | 2003-12-11 |
| KR20050016504A (ko) | 2005-02-21 |
| KR100774077B1 (ko) | 2007-11-06 |
| TW200307593A (en) | 2003-12-16 |
| TWI311521B (ja) | 2009-07-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2786225B2 (ja) | 工業用ロボットの制御方法及び装置 | |
| JPH0282302A (ja) | ロボット制御装置 | |
| JPWO2014148032A1 (ja) | ロボットシステムの制御方法およびロボットシステム | |
| Wang et al. | Optimal trajectory planning of grinding robot based on improved whale optimization algorithm | |
| US20220063099A1 (en) | Framework of robotic online motion planning | |
| JP3070329B2 (ja) | 産業用ロボットシステム | |
| JP6418483B2 (ja) | 加工軌道生成装置と方法 | |
| WO2021099948A1 (en) | Method and electronic device for controlling the movement of a humanoid robot or of a robotic arm using the least number of degrees of freedom necessary for the execution of a task and computer-readable storage medium thereof | |
| Avram et al. | Trajectory planning for reconfigurable industrial robots designed to operate in a high precision manufacturing industry | |
| JP2017521275A (ja) | 産業用ロボットの5軸6軸混合制御方法及びそのシステム | |
| JP2003044109A (ja) | ワ−ク座標系設定手段を持つ多軸工作機械の数値制御装置 | |
| JP2004009172A (ja) | 多関節ロボットおよびその制御装置 | |
| JP2016002628A (ja) | 加工軌道生成装置と方法 | |
| CN112292238B (zh) | 机器人的末端执行器在一末端执行器姿势与另一末端执行器姿势之间转移的方法和系统 | |
| JP2000194409A (ja) | ロボットのプログラム変換装置 | |
| US20210245364A1 (en) | Method And Control System For Controlling Movement Trajectories Of A Robot | |
| JP3904036B2 (ja) | 多指多関節ハンドの制御装置 | |
| KR20160040027A (ko) | 병렬구조 다자유도 시스템 및 이의 최적해 도출 방법 | |
| JP2752784B2 (ja) | ロボットの姿勢修正方法 | |
| JPH0425905A (ja) | 産業用ロボットの教示・再生方法 | |
| GB2364575A (en) | Generating positioning instructions for apparatus to process an object | |
| Sapmaz et al. | Kinematic based selection of the workpiece location in robotic milling | |
| WO2024045091A1 (zh) | 执行机构的运动规划方法、装置、系统及存储介质 | |
| JPH07120183B2 (ja) | ロボツトの姿勢制御装置 | |
| CN107636418A (zh) | 一种机器人控制方法、控制设备及系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080627 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080804 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090227 |
|
| A762 | Written abandonment of application |
Free format text: JAPANESE INTERMEDIATE CODE: A762 Effective date: 20090401 |