EP4201284A1 - Machine de nettoyage de sol dotée d'une languette de préhension et procédé de retrait d'un dispositif de réservoir de fluide sale à partir d'une tête de nettoyage - Google Patents
Machine de nettoyage de sol dotée d'une languette de préhension et procédé de retrait d'un dispositif de réservoir de fluide sale à partir d'une tête de nettoyage Download PDFInfo
- Publication number
- EP4201284A1 EP4201284A1 EP22213142.7A EP22213142A EP4201284A1 EP 4201284 A1 EP4201284 A1 EP 4201284A1 EP 22213142 A EP22213142 A EP 22213142A EP 4201284 A1 EP4201284 A1 EP 4201284A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- cleaning
- cleaning head
- floor
- fluid tank
- roller unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004140 cleaning Methods 0.000 title claims abstract description 664
- 239000012530 fluid Substances 0.000 title claims abstract description 274
- 238000000034 method Methods 0.000 title claims description 24
- 238000007654 immersion Methods 0.000 claims description 57
- 238000010408 sweeping Methods 0.000 claims description 33
- 238000009434 installation Methods 0.000 claims description 31
- 239000007788 liquid Substances 0.000 claims description 26
- 230000000903 blocking effect Effects 0.000 claims description 17
- 230000005540 biological transmission Effects 0.000 claims description 12
- 230000007480 spreading Effects 0.000 claims description 12
- 238000003892 spreading Methods 0.000 claims description 12
- 238000006073 displacement reaction Methods 0.000 claims description 9
- 238000007790 scraping Methods 0.000 claims description 8
- 230000000694 effects Effects 0.000 claims description 5
- 238000003780 insertion Methods 0.000 claims description 5
- 230000037431 insertion Effects 0.000 claims description 5
- 235000001674 Agaricus brunnescens Nutrition 0.000 claims description 3
- 230000002349 favourable effect Effects 0.000 description 19
- 230000008569 process Effects 0.000 description 16
- 238000013461 design Methods 0.000 description 13
- 238000009966 trimming Methods 0.000 description 13
- 239000011324 bead Substances 0.000 description 12
- 239000000243 solution Substances 0.000 description 8
- 238000007667 floating Methods 0.000 description 6
- 230000009471 action Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 239000002245 particle Substances 0.000 description 4
- 238000003825 pressing Methods 0.000 description 3
- 230000000284 resting effect Effects 0.000 description 3
- 239000004753 textile Substances 0.000 description 3
- 238000012549 training Methods 0.000 description 3
- 230000006978 adaptation Effects 0.000 description 2
- 239000006260 foam Substances 0.000 description 2
- 238000004519 manufacturing process Methods 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 230000013011 mating Effects 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000003860 storage Methods 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 2
- 241000511343 Chondrostoma nasus Species 0.000 description 1
- 229920001410 Microfiber Polymers 0.000 description 1
- 241001417527 Pempheridae Species 0.000 description 1
- 239000011149 active material Substances 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000012459 cleaning agent Substances 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000007598 dipping method Methods 0.000 description 1
- 238000005553 drilling Methods 0.000 description 1
- 238000005108 dry cleaning Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 238000007688 edging Methods 0.000 description 1
- 230000009969 flowable effect Effects 0.000 description 1
- 239000013505 freshwater Substances 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 239000003658 microfiber Substances 0.000 description 1
- 230000035515 penetration Effects 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000032258 transport Effects 0.000 description 1
Images



















Classifications
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/29—Floor-scrubbing machines characterised by means for taking-up dirty liquid
- A47L11/292—Floor-scrubbing machines characterised by means for taking-up dirty liquid having rotary tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L5/00—Structural features of suction cleaners
- A47L5/12—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum
- A47L5/22—Structural features of suction cleaners with power-driven air-pumps or air-compressors, e.g. driven by motor vehicle engine vacuum with rotary fans
- A47L5/28—Suction cleaners with handles and nozzles fixed on the casings, e.g. wheeled suction cleaners with steering handle
- A47L5/30—Suction cleaners with handles and nozzles fixed on the casings, e.g. wheeled suction cleaners with steering handle with driven dust-loosening tools, e.g. rotating brushes
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4013—Contaminants collecting devices, i.e. hoppers, tanks or the like
- A47L11/4016—Contaminants collecting devices, i.e. hoppers, tanks or the like specially adapted for collecting fluids
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4013—Contaminants collecting devices, i.e. hoppers, tanks or the like
- A47L11/4025—Means for emptying
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4036—Parts or details of the surface treating tools
- A47L11/4041—Roll shaped surface treating tools
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L11/00—Machines for cleaning floors, carpets, furniture, walls, or wall coverings
- A47L11/40—Parts or details of machines not provided for in groups A47L11/02 - A47L11/38, or not restricted to one of these groups, e.g. handles, arrangements of switches, skirts, buffers, levers
- A47L11/4077—Skirts or splash guards
-
- A—HUMAN NECESSITIES
- A47—FURNITURE; DOMESTIC ARTICLES OR APPLIANCES; COFFEE MILLS; SPICE MILLS; SUCTION CLEANERS IN GENERAL
- A47L—DOMESTIC WASHING OR CLEANING; SUCTION CLEANERS IN GENERAL
- A47L9/00—Details or accessories of suction cleaners, e.g. mechanical means for controlling the suction or for effecting pulsating action; Storing devices specially adapted to suction cleaners or parts thereof; Carrying-vehicles specially adapted for suction cleaners
- A47L9/02—Nozzles
- A47L9/04—Nozzles with driven brushes or agitators
Definitions
- the invention relates to a floor cleaning machine comprising a cleaning head, support rod means connected to the cleaning head, at least one cleaning roller unit arranged on the cleaning head, and dirt fluid tank means removably seated on a base of the cleaning head.
- the invention relates to a method for removing a dirty fluid tank device for a cleaning head in a floor cleaning machine.
- the WO 2021/013343 A1 discloses a floor cleaning machine with a floor head, wherein when the floor cleaning machine is in a parked position, the floor head is supported on a base by a base device in such a way that a cleaning roller is at a distance from the base, with a tank device having at least one continuous recess through which, at least in the parked position, Base of the base device is submerged.
- the U.S. 2010/0251505 A1 and the U.S. 2017/0127901 A1 disclose further floor cleaning machines.
- the DE 20 2015 101 302 U1 discloses a cleaning device in the form of a vacuum cleaner.
- WO 2016/058901 A1 WO 2016/058856 A1 , WO 2017/063663 A1 , WO 2016/058879 A1 , WO 2016/058956 A1 are surface cleaning machines known. From the WO 2016/058907 A1 a surface cleaning machine is also known.
- a floor cleaner which comprises a handle, a main body, a roller mechanism having a roller with a cleaning belt, a scraper and a dirty fluid receptacle.
- a surface cleaning machine with a cleaning roller and a drive unit for driving the cleaning roller is known.
- a dirt tray is provided into which the cleaning roller sweeps dirt as it rotates. The dirt tray can be opened.
- a floor scrubber which is manually operated and includes a drive roller coupled to a scrub roller.
- a cleaning machine station for a cleaning machine is known, the cleaning machine station having a receiving chamber for a cleaning head of the cleaning machine.
- a floor cleaning machine is known with a handle which is pivotally mounted on a base.
- the CN 107007215A discloses a floor cleaning robot.
- the DE 20 2018 104 772 U1 discloses a dirty water collecting mechanism and dirty water detection mechanism and a cleaning device.
- Cleaning machines are also out of the AU2017101723A4 , the CN 206687671 U , the DE 20 2016 105 300 U1 , the US 9,622,637 B1 , the CN 205359367 U , the U.S. 2017/0119225 A1 , the CN 205181250 U , the CN 205181251 U , the CN 205181256 U , the DE 20 2016 105 299 U , the WO 2017/059602 A1 , the WO 2017/059600 A1 , the WO 2017/059601 A1 , the WO 2017/059603 A1 or the DE 20 2016 105 301 U1 known.
- the object of the invention is to provide a floor cleaning machine of the type mentioned at the outset, in which the dirty fluid tank device can be easily removed from the cleaning head by an operator.
- this object is achieved according to the invention in that a foot strap is arranged on the dirty fluid tank device, which protrudes beyond the base when the dirty fluid tank device is fixed to the base.
- An operator can act on the dirty fluid tank device through the foot strap without having to touch it.
- the dirty fluid tank device when the dirty fluid tank device is removed from the cleaning head, the dirty fluid tank device can be fixed to a floor by the action of force on the foot strap. As a result, the movement of the dirty fluid tank device is minimized during a removal process. This, in turn, minimizes the swaying of dirty fluid within the dirty fluid tank assembly.
- a solution can be achieved in a simple manner by lifting the cleaning head in relation to the fixed dirty fluid tank device.
- the stepping strap reduces the risk of a parked floor cleaning machine falling over with the dirty fluid tank device fixed thereto.
- the cleaning head has a front end and a rear end facing away from the front end, with the at least one cleaning roller unit being seated in the area of the front end and with the dirt fluid tank device fixed to the base, the foot strap is positioned in the area of the rear end, and in particular the kick tab protrudes backwards beyond the rear end of the base.
- an operator can act directly on the foot strap from an operator's side of the floor cleaning machine.
- Tilting moments and the like can thus be minimized.
- the laterally raised edge walls largely prevent the operator's foot from slipping off. Furthermore, sharp edges and the like can be avoided.
- the arrangement on a floor or a wall of the dirty fluid tank device results in a simple structural design.
- the cleaning head is positioned stably on the surface to be cleaned.
- the support element is arranged on a base of the cleaning head and not on the dirty fluid tank device.
- the dirty fluid tank device is suspended from the base. This makes it easy to achieve a floating mount.
- the dirty fluid tank device can be removed from the cleaning head in a simple manner by applying force to the foot strap.
- the cleaning head and the dirty fluid tank device can be fixed in place in a simple manner, in particular by placing the cleaning head on the dirty fluid tank device from above.
- At least one holder and in particular a holding dome or holding mushroom is seated on the base and in particular at least two spaced holders are provided and the dirty fluid tank device has an associated receptacle for the at least one holder, with the dirty fluid tank device being held on the base the at least one holder in the associated recording is submerged.
- hanging mounting of the dirty fluid tank device on the base can be implemented in a simple manner.
- the dirty fluid tank device can easily on the Cleaning head can be fixed and detached from it.
- a solution can be achieved by removing the holder from the receptacle, or fixing can be achieved by immersing the holder in the receptacle.
- a holder-receptacle combination is designed as a snap-in connection device. As a result, a fixing position can be locked in a simple manner.
- the at least one holder has a first element and the associated receptacle has a second element, which are adapted to one another such that when the first element rests against the second element in a locked position, the dirty fluid tank device falls off the base downwards is blocked away and when applying a certain amount of force, the blocking can be lifted.
- a corresponding training can be implemented in a structurally simple manner.
- the dirty fluid tank device can be detached from the cleaning head in a simple manner, or it can be fixed in place in a simple manner.
- first element and the second element are adapted to one another in such a way that a direction of force when a force is applied to cancel the blocking is in a direction transverse to an underside of the base away from the base, with the underside of the base faces the dirty fluid tank device when the dirty fluid tank device is held on the base.
- a solution can be achieved in a simple manner by the application of force to the step strap, in particular via an operator's foot.
- the dirty fluid tank device can be fixed to a floor by applying force to the foot strap and a solution can be achieved by lifting the cleaning head.
- the second element is designed as a spreading element, which can be spread open with a corresponding application of force, and the first element is a blocking element and is surrounded by the second element, or (ii) the first element is designed as a spreading element is, which can be spread open with a corresponding effort, and the first element surrounds the second element, wherein the second element is a blocking element.
- the expansion element comprises at least one mobile tab and advantageously a plurality of tabs. A movement is achieved by applying the appropriate force. In this way, a blocked position can be achieved or canceled in a simple manner.
- the dirty fluid tank device can be detached and fixed on the cleaning head in a simple manner.
- the receptacle for the associated holder has an extension on a top side of the dirty fluid tank device and is in particular funnel-shaped, with the top side of the dirty fluid tank device facing the base when the dirty fluid tank device is held on the base. It is possible to bring in the Facilitate holder in the recording. Centering can also be achieved. In this way, the dirty fluid tank device can be fixed to the cleaning head in a particularly simple manner.
- the foot strap is arranged and designed in such a way that, when the cleaning head is properly positioned on a floor to be cleaned, an operator detaches the dirty fluid tank device from the base by applying force to the foot strap and lifting the cleaning head away from the floor to be cleaned. It can thus be detached from the base without touching the dirty fluid tank device.
- the holding rod device is arranged and designed in such a way that the cleaning head can be lifted off by means of the holding rod device.
- an operator then does not have to bend down or kneel in order to enable a solution.
- the cleaning head can be placed onto the dirty fluid tank device from above and the dirty fluid tank device can be fixed to the base.
- An operator can, for example, fix the dirty fluid tank device to the floor by means of the foot strap.
- the dirty fluid tank device can be fixed to the base by simply putting it on from above.
- This solution makes it possible to implement a floor cleaning machine in which the holding rod device is supported by its weight on the at least one cleaning roller unit. As a result, a large, in particular maximum, contact pressure is achieved due to the dead weight of the holding rod device for the cleaning head on a floor to be cleaned.
- the correspondingly high contact pressure results in improved cleaning results.
- the detachment of dirt from the floor to be cleaned is improved.
- the appropriate design of the swivel joint makes it easy to realize that in every position of the swivel joint the cleaning head, on which in particular a dirty fluid tank device is detachably arranged, is in the same position relative to the floor to be cleaned. This also improves the cleaning result.
- the swivel joint is designed as an orbital joint with an orbital path guidance of the holding rod device on the cleaning head. This makes it easy to achieve coaxiality between the pivot axis of the pivot joint and the axis of rotation. In particular, it can be achieved that when the holding rod device is pivoted towards the cleaning head, when the cleaning head with the at least one cleaning roller unit is properly placed on the floor to be cleaned, the cleaning roller unit rotates on the floor due to the pivoting.
- the swivel joint has a path guide device which is seated in a rotationally fixed manner on the cleaning head and which has a circular path section with a center which lies on the swivel axis, and the swivel joint has a counter-device which is seated in a rotationally fixed manner on the holding rod device and which supported on the web guiding device.
- An orbital joint can thus be formed in a simple manner, with the pivot axis coinciding with the axis of rotation of the at least one cleaning roller unit.
- there is a large support area for the opposing device on the web guiding device This allows a mechanically stable swivel joint to be implemented which has a correspondingly long service life.
- the circular path section encompasses the at least one cleaning roller unit to a certain extent from two sides.
- a swivel joint and in particular an orbital joint can be implemented in a simple manner, the swivel axis of which coincides with the axis of rotation of the at least one cleaning roller unit.
- the counter-device is supported on the web-guiding device via at least three support points. This results in a mechanically stable swivel joint construction.
- the pivot joint is centrally located between a first lateral side and a spaced second lateral side of the cleaning head. This results in a symmetrical design and tilting moments and the like are avoided.
- the at least one cleaning roller unit also moves when the holding rod device is pivoted about the pivot axis. It then rolls on a floor to be cleaned when the cleaning head is properly supported on the floor to be cleaned via the at least one cleaning roller unit. This movement is superimposed on the rotational movement of the at least one cleaning roller unit about the axis of rotation.
- a drive motor is provided for the cleaning roller unit, which is connected to the holding rod device in a rotationally fixed manner in relation to the pivotability of the holding rod device about the pivot axis. This results in a structurally simple embodiment.
- the drive motor is also pivoted. In this way, a drive train with the drive motor and the cleaning roller unit (on a roller mount) can be implemented in which no sliding clutch or the like has to be provided.
- a transmission device for transmitting torque from a drive motor to the at least one cleaning roller unit, in which the transmission device is connected to the retaining rod device in a rotationally fixed manner in relation to the pivotability of the retaining rod device about the pivot axis.
- the entire drive train consisting of the drive motor and the transmission device can be pivoted relative to the cleaning head by pivoting the holding rod device on the cleaning head, and no additional coupling is necessary.
- a roller mount is provided on which the at least one cleaning roller unit is seated, the roller mount being non-rotatably connected to the support rod device in relation to the pivotability of the support rod device.
- the entire drive train consisting of the drive device, gear device and drive motor is connected in a torque-proof manner to the holding rod device and can be pivoted with it. This results in a direct effect of the weight of the holding rod device including the drive motor and gear device on the cleaning roller unit to provide a high and in particular maximum contact pressure of the cleaning roller unit on a floor to be cleaned.
- the at least one cleaning roller unit sits on a roller mount on a shaft with a first shaft part, a middle part and a second shaft part, wherein the middle part lies between the first shaft part and the second shaft part and a first roller part of the at least one cleaning roller unit is arranged on the first shaft part and a second roller part of the at least one cleaning roller unit is arranged on the second shaft part, and it is a Central drive is provided, which acts on the central part, and the central part is arranged in relation to a longitudinal axis of the cleaning head in alignment with the swivel joint. This central drive allows the first roller part and the second roller part to be guided to the lateral side ends of the cleaning head. It can thereby achieve a near-edge cleaning. By arranging the swivel joint in alignment with the central part, tilting moments and the like can be avoided.
- the support bar device has a first part and a second part, the first part being articulated to the cleaning head and the second part being rotatable about an axis of rotation relative to the first part, the axis of rotation being transverse and preferably is oriented perpendicular to the pivot axis of the pivot joint.
- the additional rotatability makes it easier for an operator, for example, to carry out a cleaning process in corners or the like. He can position the cleaning head in different ways relative to himself due to the rotatability around the axis of rotation.
- the axis of rotation is, for example, parallel to a longitudinal axis of the first part or, for example, parallel to a longitudinal axis of the second part.
- the parking position that can be determined is a rest position for the floor cleaning machine, in particular when it is not in operation. Outside of this resting position, it can be rotated in order to achieve extensive cleaning options.
- the locking device can be implemented in a simple manner by the movable slide.
- the spring support makes it easy to automatically reach the locking position for a parking position.
- the spring support is such that, outside of the parking position, the slide is held in such a position that there is no form fit with the second part.
- the slide is moved against the force of the spring device in such a way, in particular by appropriately supporting the slide on the cleaning head, that the form fit is achieved.
- the slide has a lug, the lug then enabling the cleaning head to act, in particular from the parking position, in order to push the slide into the form-fitting locking position with the second part of the holding rod device or to hold it there.
- overload protection is provided for the locking device. This reduces or prevents the risk of damage to the floor cleaning machine in the event of a high force load, particularly in the parking position.
- a fallback option is provided to reduce the risk of damage.
- the slide is designed in several parts, so that in the parking position, if it is not possible to move the slide as a whole, the parts of the slide can move relative to one another in order to provide overload protection and reduce the risk of damage.
- the slide By spring-supporting the second part on the first part, the slide is movable as a whole with the first part and with the second part outside of the overload situation in order to reach the locking position or to be able to release the locking position.
- the multi-part design makes it possible to deviate at the slide itself when there is a high force load.
- the support rod device has a first area with a first longitudinal axis and a second area with a second longitudinal axis, the first longitudinal axis and the second longitudinal axis being oriented at an obtuse angle to one another, the obtuse angle in particular being in the range between 120° and 170°.
- a correspondingly high pivoting angle results.
- a small lower limit means that it is easy to drive underneath, for example under furniture.
- a lockable parking position allows the holding rod device to be in a stable position relative to the cleaning head and the floor cleaning machine to be in a stable position overall for parking or, for example, for a cleaning process of the at least one cleaning roller unit.
- a locking device which locks the retaining rod device at the upper limit with the cleaning head in such a way that the retaining rod device cannot be pivoted relative to the cleaning head. This allows the holding rod device to be locked with the cleaning head.
- a storage positioning for the floor cleaning machine results. In this way, an automated cleaning process of the at least one cleaning roller unit or of other parts of the floor cleaning machine can also be carried out in a simple manner at a corresponding floor station. A "fall" of the support rod device is prevented.
- the locking device comprises at least one spring-loaded pin and an associated insertion opening for the pin, with (i) the at least one pin being arranged in a rotationally fixed manner on the support rod device and the associated immersion opening being arranged in a rotationally fixed manner on the cleaning head, or (ii) the at least one Pin is arranged in a rotationally fixed manner on the cleaning head and the associated immersion opening is arranged in a rotationally fixed manner on the holding rod device.
- a locking device can be implemented in a structurally simple manner by means of a pin immersion opening. The locking can be produced and canceled by an operator in a simple manner. In particular, the locking can be produced automatically by reaching a certain pivoting position (in particular the upper limit). Furthermore, the locking position (locked position) can be canceled in a simple manner by exerting force on the holding rod device.
- the pin is displaceably arranged and spring-loaded.
- a positioning of the pin can be achieved against the action of the spring force, which enables immersion into the immersion opening.
- the pin is pressed into the immersion opening by the spring loading as soon as this is reached.
- This locking process can be carried out solely by means of a pivoting movement on the holding rod device and can therefore be carried out automatically.
- a corresponding blocking position can be reached directly with the pin immersed in the immersion opening by pivoting, in particular to an upper limit of the pivot angle range.
- the corresponding blocking position can be reached easily and automatically.
- the second inclined plane By means of the second inclined plane, a corresponding expenditure of force can be set, which is necessary in order to guide the pin out of the immersion opening again.
- the exertion of force can be achieved by exerting a torque on the holding rod device. This makes it possible to achieve an automated cancellation of the blocking position. An operator then only needs to pivot the support rod assembly toward the cleaning head without performing any further intervention to release the lock.
- the first inclined plane and the second inclined plane also make it easy to set the amount of force required to reach the locked position (pin inserted into the insertion opening) or to release the locked position (the pin emerging from the insertion opening). In particular, such a dimensioning is provided that the force required to release the locked position is greater than to reach the locked position.
- the arrangement of the kick tab on the dirty fluid tank device allows the dirty fluid tank device to be detached from the cleaning head in a simple manner. Furthermore, the risk of the floor cleaning machine falling over when parked is reduced.
- the at least one stripping element allows dirty fluid to be detached in a simple manner and, in particular, to be coupled into the dirty fluid tank device without suction.
- the cleaning head has at least one support element, via which the cleaning head is supported at a distance from the at least one cleaning roller unit on a floor to be cleaned, with the at least one support element being firmly connected to the cleaning head in particular in such a way that when a Dirty fluid tank device from the cleaning head, the at least one support element remains on the cleaning head.
- the weight of the cleaning head can be supported on the floor to be cleaned via the at least one cleaning roller unit and the at least one support element, independently of the dirty fluid tank device. This makes it possible to always keep the dirty fluid tank device parallel to the floor and in the same relation to the at least one cleaning roller unit.
- a sweeping element which is arranged on the dirty fluid tank device, can be positioned in the same position relative to the floor to be cleaned for an optimized cleaning result.
- the dirty fluid tank device can be held hanging in relation to the cleaning head in a simple manner. This in turn makes it easy to remove or fix with the cleaning head.
- a movable or floating mounting of the dirty fluid tank device on the cleaning head can be implemented in a simple manner.
- the at least one support element is aligned with the pivot bearing in relation to a longitudinal axis of the cleaning head. This minimizes tilting moments and the like.
- the sweeping element this can be achieved in a simple manner if this is arranged on the dirty fluid tank device and the dirty fluid tank device is movably and in particular floatingly seated on the cleaning head.
- the result is an optimized cleaning result. Even if a diameter of the at least one cleaning roller unit varies, for example due to wear or manufacturing tolerances, this does not impair the cleaning result.
- the cleaning head has a mounting surface for a floor to be cleaned, which is in particular a flat surface, and the cleaning head is assigned a horizontal plane parallel to the mounting surface, and when the floor cleaning machine is operating properly, the horizontal plane of the cleaning head is always in the same position relative to the installation surface is independent of a pivoting position of the support rod device relative to the cleaning head.
- the possibilities of dry sweeping operation, wet wiping operation and the combination of sweeping operation and wet wiping operation can be implemented on one device and adjusted accordingly by an operator. If necessary, an adaptation to the respective operating mode can be carried out by exchanging the at least one cleaning roller unit.
- a method of the type mentioned is also provided, in which the cleaning head is properly placed on a floor, the operator places his foot on the foot strap and exerts a lifting force on the cleaning head via the holding rod device.
- the dirty fluid tank device can be removed from the cleaning head in a simple manner.
- An operator does not have to touch the dirty fluid tank device for this purpose. He doesn't have to bend down or kneel.
- he can fix the dirty fluid tank device to the floor via the foot strap, so that the movement of the dirty fluid tank device is minimized and thereby also a fluctuation of liquid within the dirty fluid tank device is largely avoided.
- the method according to the invention is carried out in the floor cleaning machine according to the invention.
- the lifting force causes a pivotal lifting of the cleaning head from the floor. This results in easy operability. In principle, however, it is also possible for the lifting force to cause the cleaning head to be pulled upwards.
- the retaining rod device in order to lift the cleaning head, is or is brought into a locking position by pivoting the retaining rod device relative to the cleaning head, in which position the pivotability of the retaining rod device relative to the cleaning head is locked, with the retaining rod device being at an angle in the locking position in the range between 70° and 110° and in particular at about 90° to the ground.
- a parking position of the holding rod device relative to the cleaning head is reached.
- acting on the support rod means directly acts on the cleaning head due to locking.
- torque is applied to the support rod assembly, it also acts on the cleaning head. As a result, it can be raised in a simple manner and, in particular, a pivoting movement can be achieved.
- An embodiment of a surface cleaning machine according to the invention is a floor cleaning machine 10.
- the basic structure of the floor cleaning machine 10 and its basic mode of operation is based on the Figures 1 to 3 explained.
- Hard floors in particular can be cleaned with the floor cleaning machine 10 .
- the floor cleaning machine 10 includes a cleaning head 12.
- the cleaning head 12 is a floor head.
- the cleaning head 12 is placed with a set-up surface 14 on a floor 16 to be cleaned.
- the installation surface 14 is in particular a flat surface.
- At least) one cleaning roller unit 18 is arranged on the cleaning head 12 .
- exactly one cleaning roller unit 18 is provided.
- the cleaning roller unit 18 can comprise a one-piece cleaning roller or a multi-piece cleaning roller, as will be explained in more detail below.
- the cleaning head 12 has a front end 20 and a rear end 22 remote from the front end.
- a longitudinal axis 24 of the cleaning head 12 extends between the front end 20 and the rear end 22.
- the cleaning head 12 has a first lateral side 26 and an opposite second lateral side 28.
- a distance direction between the first lateral side 26 and the second lateral side 28 is transverse and in particular perpendicular to the longitudinal axis 24.
- the cleaning roller unit 18 is arranged in the area of the front end 20 of the cleaning head 12 .
- an operator stands behind the rear end 22 of the cleaning head 12 on the floor 16 to be cleaned.
- the installation surface 14 is via the cleaning roller unit 18 and at least one installation element (in the Figures 1 to 3 not shown).
- the cleaning head 12 and thus also the floor cleaning machine 10 are supported via the cleaning roller unit 18 and the at least one positioning element on the floor 16 to be cleaned.
- the cleaning head 12 has a base 30 .
- This base 30 is a main body of the cleaning head 12.
- a detachable dirty fluid tank assembly 32 is seated on the cleaning head 12.
- the dirty fluid tank assembly 32 holds dirty fluid.
- Dirty fluid is understood here as a flowable fluid which can be wet or dry.
- the dirty fluid can include, for example, cleaning liquid with dirt particles or only dust particles.
- the dirty fluid tank device 32 can comprise a number of separate individual parts which can be fixed individually to the base 30 and can be removed from it.
- the dirty fluid tank assembly 32 comprises a unit having one or more separate compartments for dirty fluid.
- a holding rod device 36 is pivoted to the cleaning head 12 via a swivel joint.
- the holding rod device 36 is designed in such a way that a standing operator can hold the floor cleaning machine 10 and guide it over the floor 16 to be cleaned.
- a handle 38 is disposed proximally on the support rod assembly 36 .
- the handle 38 is designed as a closed loop handle.
- Other configurations such as a non-closed loop handle and the like are also possible.
- the support rod assembly 36 is pivoted to the base 30 via the pivot joint.
- a pivot axis 40 ( figure 2 ) of the swivel joint of the articulation of the holding rod device 36 to the cleaning head 12 is parallel to the installation surface 14.
- the swivel axis 40 is transverse and in particular perpendicular to the longitudinal axis 24.
- the holding rod device 36 has a (second) longitudinal axis 42 along which the holding rod device 36 extends up to the handle 38 .
- the pivot axis 40 is transverse and in particular perpendicular to this second longitudinal axis 42 of the support rod device 36.
- This rotatability is in figure 1 indicated by the arrow with the reference number 44.
- the corresponding axis of rotation 41 of this rotatability 44 is, for example, parallel or coaxial to a first longitudinal axis 80 of the support rod device 36 (see below).
- this rotatability 44 is formed by a corresponding design of the holding rod device 36 with a first part 278 and a second part 280 that can be rotated relative to the first part 278 . This is explained below in particular with reference to Figures 15 to 18 explained in more detail.
- the floor cleaning machine 10 includes a drive motor (in Figs Figures 1 to 3 not shown), by which the cleaning roller unit 18 is driven in rotation about an axis of rotation 46 .
- the cleaning roller unit 18 has a single axis of rotation 46, even if this includes a multi-part cleaning roller.
- the axis of rotation 46 is parallel to the installation surface 14. It is oriented perpendicular to the longitudinal axis 24. It is parallel to the pivot axis 40.
- the pivot axis 40 of the pivotability of the support rod device 36 on the cleaning head 12 and the axis of rotation 46 are coaxial with one another.
- the drive motor is located on the cleaning head 12, or located on the support rod assembly 36, or located at a transition area between the support rod assembly 36 and the cleaning head 12. It acts on the cleaning roller unit 18 and provides a corresponding torque for rotating the cleaning roller unit.
- the floor cleaning machine 10 may be mains powered or battery powered.
- a battery holder 48 which houses one or more batteries, and particularly rechargeable batteries.
- the batteries can be fixed to the floor cleaning machine 10 or be removable from it.
- the battery holder 48 is arranged on the support bar device 36 .
- an arrangement on the cleaning head 12 is also possible.
- the floor cleaning machine 10 is designed in particular for the wet cleaning of hard floors.
- a tank device 50 for cleaning liquid is provided.
- the cleaning liquid is, in particular, fresh water, optionally with the addition of a cleaning agent.
- the cleaning roller unit 18 can be moistened directly and/or the floor 16 to be cleaned can be moistened via cleaning liquid from the tank device 50 . As a result, dirt can be removed in an improved manner, and the corresponding dirty fluid is picked up by the cleaning roller unit 18 and delivered to the dirty fluid tank device 32 .
- the tank device 50 is arranged on the support rod device 36 .
- a corresponding supply device for cleaning liquid is provided, which leads from the tank device 50 to the cleaning head 12 in order to be able to correspondingly moisten the cleaning roller unit 18 and/or the floor 16 to be cleaned with cleaning liquid.
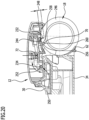
- FIG 3 the basic functional structure of the cleaning head 12 is shown and the basic mode of operation is explained with reference to FIG figure 3 explained.
- the cleaning head 12 is placed with its installation surface 14 on the floor 16 to be cleaned (in figure 3 the at least one further positioning element is not shown).
- the cleaning roller unit 18 acts on the floor to be cleaned and rotates in a direction of rotation 52.
- the dirty fluid tank device 32 is seated on the base 30 of the cleaning head 12.
- a mouth device 54 which has a mouth opening 56 is arranged on the cleaning head 12 .
- This orifice 56 is in fluid communication with the dirty fluid tank device 32 or is itself an orifice on the dirty fluid tank device 32 .
- the cleaning roller unit 18 rotates, it is rotated past the orifice 56 .
- the dirty fluid tank device 32 has a floor 58 .
- this floor 58 faces the floor 16 to be cleaned.
- the wall 60 is adapted to the cylindrical shape of the corresponding cleaning roller of the cleaning roller unit 18 .
- the cleaning head 12 has a sweeping element 62 which is used to feed coarse dirt to the cleaning roller unit 18 .
- This coarse dirt is in figure 3 indicated by double arrows 64.
- the coarse dirt 64 which is made available to the cleaning roller unit 18 via the sweeping element 62 can be taken along by the cleaning roller unit 18 and thrown into the dirt fluid tank device 32 via the outlet opening 56 .
- the sweeping element 62 is arranged on the base 30 or, as in FIG figure 3 shown, arranged on the dirty fluid tank device 32 .
- the cleaning roller unit 18 is moistened with cleaning liquid via a supply device 66 for cleaning liquid.
- This humidification is in figure 3 indicated by the wavy arrows with reference numeral 68.
- the moistening takes place downstream of the orifice opening 56 in relation to the direction of rotation 52 .
- a region of the cleaning roller unit 18 which is seated on the floor 16 to be cleaned then, during rotation in the direction of rotation 52 , first passes the orifice 56 and then the corresponding region with the moistening 68 .
- At least one stripping element 70 is provided, which is arranged on the base 30 and is positioned between the orifice opening 56 and the area of humidification 68 .
- the stripping element 70 is movably positioned on the base 30 .
- the stripping element 70 is seated on a holder 72 which is articulated pivotably on the base 30 .
- This holder 72 is spring-loaded (in figure 3 Not shown). The spring loading presses the stripping element 70 against the cleaning roller unit 18.
- the cleaning roller unit 18 has an attachment which is arranged on a corresponding attachment holder.
- the trimming is a textile material, for example. In principle, however, it can also be a bristle trimming.
- the stripping element 70 is arranged in such a way that it touches the trimming and preferably dips into the trimming.
- the spring loading of the movable holder 72 accordingly ensures that it is pressed or pressed in.
- the wiping element 70 forms an opening wall of the opening device 54 for the opening 56.
- the wiping element 70 separates the area of moistening 68 from the opening 56.
- the stripping element 70 acts on the cleaning roller unit 18 and on the bristles in such a way that dirty fluid is detached from the corresponding cleaning roller (and in particular moist dirty fluid is detached) and conveyed via the orifice opening 56 into the dirty fluid tank device 32 .
- This dirty fluid 74 detached by the stripping element 70 can also contain coarse dirt particles which were not conveyed directly into the dirty fluid tank device 32 via the outlet opening 56 .
- the floor cleaning machine 10 with the training according figure 3 has a sweeping function, through which coarse dirt (and also dry coarse dirt) can be swept from the floor 16 to be cleaned. It has a wiping function, by means of which the floor 16 to be cleaned can be moistened via the moistening device 68 and wet dirty fluid can be picked up and detached via the stripping element 70 and conveyed into the dirty fluid tank device 32 .
- the cleaning roller unit 18 is positioned on the cleaning head 12 in particular so that it can be replaced. As a result, for example, the cleaning roller unit 18 or a cleaning roller can be cleaned easily. As a result, an adaptation to the special cleaning process is also possible. If, for example, a cleaning roller of the cleaning roller unit 18 has a textile trimming such as a microfiber trimming, wet cleaning and sweeping cleaning can be carried out at the same time. However, it is also possible, for example, for a cleaning roller to be used as the cleaning roller with bristles is used to carry out a pure sweeping process. (Moistening of the cleaning roller unit 18 or the floor 16 to be cleaned is particularly switched off during the pure sweeping process.)
- the dirty fluid tank device 32 in particular with the sweeping element 62 fixed thereto, is arranged floating relative to the base 30 in order, for example, to be able to position the sweeping element 62 in the same position as the cleaning roller unit 18, regardless of the trim length of the cleaning roller unit 18.
- the basic operation of the floor cleaning machine 10, as based on the figure 3 was explained is also possible for a cleaning head 12 without a holding rod device 36 and in particular for a self-propelled and self-steering cleaning machine ("cleaning robot").
- cleaning robot a self-propelled and self-steering cleaning machine
- the battery holder 48 and the tank device for cleaning liquid 50 are then arranged in the cleaning head 12 itself.
- dirty fluid is conveyed via the cleaning roller unit 18 into the dirty fluid tank device 32 without a suction unit.
- the dirty fluid tank device 32 can be removed from the cleaning head 12 for emptying.
- the dirty fluid that is in the dirty fluid tank device 32 it is also possible for the dirty fluid that is in the dirty fluid tank device 32 to be sucked out.
- a corresponding suction unit device and an associated additional dirty fluid tank are arranged on the holding rod device 36 .
- support rod assembly 36 includes a first portion 76 and a second portion 78 .
- the first area 76 is arranged at an angle to the second area 78 .
- the first portion 76 is a distal portion, and the second portion 78 is seated with the handle 38 and thus also the proximal portion.
- a control panel with a plurality of control elements is arranged on the handle 38 or on the second area 78 .
- the tank device 50 for cleaning liquid is arranged on the second area 78 .
- control panel includes a switch that can be used to switch whether the cleaning roller unit 18 and/or the floor 16 to be cleaned is moistened with cleaning liquid from the tank device 50 for cleaning liquid 50 .
- this makes it possible to carry out a dry sweeping operation or a wet mopping operation.
- the first region 76 extends in a first longitudinal axis 80 (also compare figure 1 ), and the second portion 78 along the second longitudinal axis 42.
- the first portion 76 and the second portion 78 are at an obtuse angle 82 ( figure 1 ) to each other, which is in the range between 120° and 170°.
- this obtuse angle 82 is approximately 145°.
- the first area 76 and the second area 78 are continuously connected to each other.
- the support rod device 36 is articulated to the cleaning head 12 and thereby to the base 30 by means of a pivot joint 84 via the first region 76 .
- the pivot axis 40 of the pivot joint 84 coincides with the axis of rotation 46 of rotation of the cleaning roller assembly 18 .
- the swivel joint 84 is designed as an orbital joint. It comprises a web guiding device 86 which is seated on the cleaning head 12 and on the base 30 in a rotationally fixed manner. This path guiding device 86 comprises a circular path section 88. A center of the circular path section 88 lies on the pivot axis 40/rotational axis 46.
- a counter-device 90 which is supported on the web-guiding device 86 , is connected to the first region 76 in a rotationally fixed manner.
- the counter-device 90 is slidably guided on the circular path section 88 of the path-guiding device 86; there is an orbital guidance of the counter-device 90 on the circular path section 88 of the path-guiding device 86 .
- At least three support points are provided for guiding the opposing device 90 on the web guiding device 86 .
- the circular path section 88 is arranged with a partial area behind the cleaning roller unit 18 in relation to the longitudinal axis 24 of the cleaning head 12 . Relative to a height axis 92, which is perpendicular to the longitudinal axis 24 and perpendicular to the installation surface 14, the circular path section 88 is arranged with a partial area above the cleaning roller unit 18.
- the circular path section 88 is designed, for example, at least approximately as a quadrant section, which to a certain extent encompasses the cleaning roller unit 18 .
- the pivot joint is positioned midway between the first lateral side 26 and the second lateral side 28 on the base 30 . In particular, it is arranged symmetrically on the cleaning head 12 . It lies on a median plane 94 (cf figure 2 ), which is located centrally between the first lateral side 26 and the second lateral side 28 and is oriented perpendicularly to the axis of rotation 46 or pivot axis 40 .
- the center plane 94 is also oriented perpendicular to the installation area 14 .
- a drive motor 98 which is in particular an electric motor, is provided for driving the cleaning roller unit 18 in the rotational movement of the axis of rotation 46 with the direction of rotation 52.
- This is non-rotatably connected to the support rod device 36 so that it is also pivoted about the pivot axis 40 during a pivoting movement of the support rod device 36 .
- the drive motor 98 is positioned on the support rod assembly 36 and is particularly positioned on the first portion 76 .
- the first portion 76 of the support rod assembly 36 includes a housing 100 that houses the drive motor 98 .
- a battery holder 48 ′ is arranged on the first area 76 or on a transition between the first area 76 and the second area 78 . (In the case of the figures 1 and 2 shown embodiment, the battery holder 48 is arranged on the second area 78.)
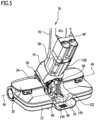
- a free space 102 (cf figure 5 ) formed midway between first lateral side 26 and second lateral side 28 and lying at midplane 94 .
- This free space 102 forms a pivoting space in which the holding rod device 36 can be moved, with the first area 76 then being able to be moved in this free space 102 in particular.
- the clearance 102 is open to the rear end 22 .
- the housing 100 with the drive motor 98 can be moved in the free space 102 .
- the free space 102 results in a large pivoting angle range for the pivotability of the support rod device 36 about the pivot axis 40 relative to the base 30.
- the floor cleaning machine 10 has a transmission device 104 ( figure 7 ), which serves to transmit a torque from the drive motor 98, which is positioned at a distance from the cleaning roller unit 18, to the cleaning roller unit 18.
- the transmission device 104 also includes a reduction gear, which is used to reduce the speed, so that a speed of the cleaning roller unit 18 when rotating about the axis of rotation 46 is lower than a drive speed of the drive motor 98.
- the transmission device 104 includes, for example, a belt transmission and the speed reduction gear.
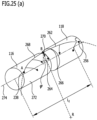
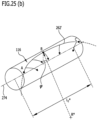
- the cleaning roller unit 18 is or includes a roller mount 106.
- the roller mount 106 in turn includes a shaft 108 which is connected to the transmission device 104 in a torque-effective manner.
- the shaft 108 rotates about the axis of rotation 46 when driven accordingly by the drive motor 98.
- the shaft 108 (cf figure 6 ) a first shaft portion 110, a second shaft portion 112 and a middle portion 114 which is connected to the first shaft portion 110 and the second shaft portion 112.
- the shaft 108 with the first shaft part 110, the second shaft part 112 and the middle part 114 forms a unitary shaft with a single axis of rotation, namely the axis of rotation 46.
- the middle part 114 lies centrally between the first lateral side 26 and the second lateral side 28 and lies at the middle plane 94.
- the first shaft portion 110 receives a first roller portion 116 and the second shaft portion 112 receives a second roller portion 118 of the cleaning roller unit 18.
- the first barrel portion 116 and the second barrel portion 118 are separate units, but rotate about the same axis of rotation 46 when seated on the shaft 108 .
- the first roller portion 116 which is seated on the first shaft portion 110, extends to the first lateral side 26, or almost to it.
- the second roller portion 118 which is seated on the second shaft portion 112, extends to the second lateral side 28, or almost to it.
- the central portion 114 of the shaft 108 is roller-free.
- the transmission device 104 is coupled to it in a torque-effective manner. There is a center drive of the cleaning roller unit 18 .
- the first roller part 116 and the second roller part 118 are each pushed onto the associated shaft part 110 or 112 from the outside and latched accordingly with the associated shaft part 110 or 112 in order to obtain a non-rotatable connection.
- the central part 114 of the shaft 108 and thus the roller mount 106 and the swivel joint 84 are aligned. They lie on the center plane 94 and are in particular each formed mirror-symmetrically to the center plane 94 .
- the cleaning head 12 has (at least) one support element 120 .
- exactly one support element 120 is provided ( figure 7 , Figure 19(d) , figure 23 , 24 ).
- the support element 120 sits at a distance from the cleaning roller unit 18 and defines the installation surface 14 with it.
- the support element 120 sits on the base 30. Even if the dirty fluid tank device 32 is removed, the cleaning head 12 with the cleaning roller unit 18 and the support element 120 can be placed on a floor 16 to be set up.
- the support member 120 includes a post 122 on which a roller or slider 124 is seated.
- the roller or the slider 124 is used for support on the floor 16 to be cleaned.
- the roller or the slider 124 for example a skid being provided, is guided over the floor 16 to be cleaned when the floor cleaning machine 10 is guided.
- the base 30 has an underside 126 facing the dirty fluid tank device 32 .
- the post 122 projects transversely and in particular perpendicularly from this underside 126 in the direction of the installation surface 14 .
- the support element 120 lies on the center plane 94.
- the shape and dimensions of the dirty fluid tank device 32 are adapted to the base 30 .
- the dirty fluid tank device 32 has a bottom 127 and a top 128 .
- the top 128 of the dirty fluid tank device 32 faces the bottom 126 of the base 30 .
- the bottom 127 of the dirty fluid tank device 32 lies on the bottom 58 and faces away from the top 128 .
- the wall 60 and another wall 130 which closes the dirty fluid tank device 32 with an interior space for receiving dirty fluid.
- the wall 60 of the dirty fluid tank device 32, on which the orifice 56 is seated, has a cutout 132 (cf figure 6 ) which is fitted to the center portion 114 of the shaft 108.
- the central portion 114 is at least partially seated within the cutout 132 of the dirty fluid tank assembly 32 with free rotation.
- the mouth opening 56 of the mouth device 54 comprises, in particular, a first opening part 134 and a second opening part 136.
- the first opening part 134 is associated with the first roller part 116 and the second opening part 136 is associated with the second roller part 118 .
- the dirty fluid tank device 32 has a first chamber 138 and a second chamber 140 .
- the first opening part 134 is formed and on the second chamber 140 the second opening part 136 is formed. Dirty fluid is coupled directly into the first chamber 138 via the first opening portion 134 and dirty fluid is coupled directly into the second chamber 140 via the second opening portion 136 .
- the two chambers 138 and 140 can be separated from one another in a fluid-tight manner or can be fluidly connected to one another, so that dirty fluid can be evenly distributed in the dirty fluid tank device 32 .
- the dirty fluid tank device 32 has a cover 142 which at least partially forms the upper side 128 .
- This cover 142 is at a distance from the base 58.
- the cover 142 can be removed when the dirty fluid tank device 32 has been removed from the cleaning head 12 in order to be able to empty the dirty fluid tank device 32 .
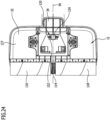
- the kick tab 34 is arranged on the wall 130 of the dirty fluid tank device 32 . It is arranged in such a way that, when the dirty fluid tank device 32 is fixed to the base 30 , it is at a distance from the installation surface 14 .
- the kick tab 34 is arranged in alignment with the free space 102 . It is a continuation of the space 102 from the rear end 22 away. It is arranged in such a way that it does not impede the corresponding pivoting space of the holding rod device 36 in the free space 102 .
- the step strap 34 is located on the center plane 94 and is in particular arranged and formed mirror-symmetrically to this.
- the kick strap 34 includes a panel 144 having raised edge walls 146 (see FIG figure 5 ).
- the edge walls 146 are rounded in this case.
- the kick strap 34 has a width (in a direction parallel to the pivot axis 40 or rotation axis 46) which is at least as wide as typical dimensions of a foot with shoes.
- An operator may place his foot on the step tab 34 and then, by applying appropriate force, lift the cleaning head 12 to detach the dirty fluid tank assembly 32 from the base 30 . This is described in more detail below.
- the raised, rounded edge walls 146 of the step strap 134 prevent an operator's foot from slipping off to the side. Sharp edges on the plate 144 are avoided.
- spaced webs or grooves are arranged on the plate 144, which are intended to prevent an operator's foot from slipping off.
- the step strap 34 is arranged in alignment as a continuation of the free space 102 . It is aligned in relation to the longitudinal axis 24 of the cleaning head 12 with the swivel joint 84 and also aligned with the central part 114 of the shaft 108 .
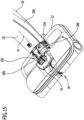
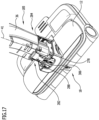
- the dirty fluid tank device 32 has a removal direction 148 ( figure 6 ) away from base 30.
- the removal direction 148 leads away from the underside 126 of the base 30 in the direction of the installation surface 14.
- the dirty fluid tank device 32 can be removed from the cleaning head 12 in such a way that, for example, by lifting the cleaning head 12 and Pressing the dirty fluid tank device 32 (e.g. on the step tab 34) in the direction of the removal direction 148, or by pulling the dirty fluid tank device 32 away from the base 30 in the removal direction 148 and can thus be removed.
- a space 150 is formed in the cleaning head 12, delimited by the underside 126 of the base 30, in which the dirty fluid tank device 32 is positioned when it is fixed to the base 30.
- the support element 120 is also located in this space.
- a continuous recess 152 ( figures 7 , 19(d) , 24 ) educated. This continuous recess 152 is open at the top 128 and at the bottom 127 . The continuous recess 152 is closed at the side, so that it is closed in a fluid-tight manner.
- the support element 120 When the dirty fluid tank device 32 is seated on the base 30, the support element 120 is immersed through the continuous recess 152, so that the cleaning head 12 can be supported via the support element 120 on the floor 16 to be cleaned.
- the continuous recess 152 is dimensioned in such a way that the support element 120 can penetrate through and correspondingly also emerge when the dirty fluid tank device 32 is removed from the base 30 .
- the continuous recess 152 is closed on all sides.
- the continuous recess 152 it is also possible for the continuous recess 152 to be open towards the rear end 22 .
- the continuous recess 152 has the shape of a (hollow) cylinder.
- the continuous recess 152 is arranged in line with the central part 114 of the shaft 108, the pivot joint 84 and the foot strap 34, corresponding to the aligned orientation of the support element 120 in relation to the longitudinal axis 24.
- the dirty fluid tank assembly 32 is suspended from the base 30 .
- a plurality of holders 154 (cf figures 11 and 13 ) provided, which sit on the base 30 and protrude from the underside 126 away in the direction of the installation surface 14.
- a first bracket and a second spaced bracket are provided. These are designed as described below and, in particular, are designed in the same way.
- the first holder and the second holder are preferably arranged mirror-symmetrically to the center plane 94 and the free space 102 lies between them.
- a first location 156 is indicated at which the first holder sits, and a second location 158 is indicated at which the second holder sits. As mentioned, these are the attachment points for the dirty fluid tank device 32 on the base 30.
- the holders 154 are designed as holding domes or holding mushrooms.
- the holder 154 and the associated receptacle 160 form a holder-receptacle combination 162, which is designed as a snap-in connection device.
- a corresponding holding position or locking position is shown.
- the holder 154 includes a first element 164 which corresponds to a second element 166 of the receptacle 160 on the dirty fluid tank device 32 .
- the first element 164 has a receiving area 168 for the second element 166.
- This receiving area 168 is, for example, cylindrical.
- the receiving area 168 of the first element 164 is delimited by a bead 170 .
- the bead 170 has a diameter (in a direction transverse to the elevation axis 92) which is larger than the corresponding diameter of the receiving area 168.
- the ridge 170 is disposed on the first member 164 as an annular region. It has a first surface area 172 which faces the receiving area 168 . A second surface area 174 , which faces away from the receiving area 168 , adjoins the first surface area 172 .
- the bead 170 is tapered at the first surface area 172 away from the receiving area 168 . It is on the second surface area 174 likewise conical with a slope towards the receiving area 168 .
- An inclined plane is formed by the first surface region 172 which, as will be explained in more detail below, requires an application of force in order to detach the second element 166 from the first element 164 .
- An inclined plane is also formed by the second surface area 174 , which requires an expenditure of force in order to connect the second element 166 to the first element 164 .
- the cone angle of the first surface portion 172 is greater than the cone angle of the second surface portion 174 (cf figure 11 ).
- the first cone angle for the first surface area 172 is denoted by the reference number 176 there.
- the second cone angle for the second surface area 174 is denoted by 178 .
- the second cone angle 178 is smaller than the first cone angle 176. This means that the force required to loosen and remove the dirty fluid tank device 32 from the base 30 is greater than to insert (for fixing) the dirty fluid tank device 32 to the base 30.
- the second element 166 on the receptacle 160 of the dirty fluid tank device 32 is designed as a spreading element which has at least two and preferably at least three tabs which can be moved transversely to the vertical axis 92 (increasing the distance).
- the second element 166 as a spreading element is pushed onto the holder 154 .
- the second element 166 of the second surface area 174 is spread apart, increasing the distance between the tabs, until the receptacle area 168 is reached.
- the tabs of the spreading element 166 are arranged in particular in a resilient manner and snap back.
- the bead 170 serves as a barrier which prevents the dirty fluid tank assembly 32 from falling off the base 30 .
- a latching connection is established via the holder-receiving combination 162 .
- an operator exerts force on the dirty fluid tank device 32 and moves the second element (the spreader element) over the bead 170 and thereby over the first surface area 172.
- a corresponding amount of force is required to spread the second element 166 (the spreader element) open. necessary to expand the cross section accordingly so that the bead 170 can be traversed by the second element 166.
- a corresponding intermediate state after being run over is in figure 13 shown. There the locking connection is canceled.
- the spreading element 166 (the second element 166) has passed the bead 170 and is outside the receiving area 168.
- the receptacles 160 on the dirty fluid tank device 32 are open at the top 128 in order to allow the corresponding holder 154 to be immersed.
- the receptacle has an extension 180 in the shape of a hollow truncated cone towards the upper side 128 .
- This extension 180 forms an insertion and centering aid for the holder 154, which is in the form of a pin, in the associated receptacle 160.
- the dirty fluid tank assembly 32 When the dirty fluid tank assembly 32 is held on the base 30 via the holder-receiver combination 162 (at locations 156, 158), then the dirty fluid tank assembly 32 is movably mounted (in a direction/opposite direction parallel to the elevation axis 92) and is thereby supported in a floating manner .
- the weight of the floor cleaning machine 10 is supported on the floor 16 to be cleaned via the cleaning roller unit 18 and the support element 120 .
- the dirty fluid tank device 32 has no support function in this regard.
- the dirty fluid tank device 32 is movably mounted (floating) transversely and in particular perpendicularly to the installation surface 14 .
- the sweeping element 62 is still in its optimal position relative to the floor 16 to be cleaned.
- the holding rod device 36 has a pivot angle range of pivot mobility relative to the cleaning head 12 which lies between a lower limit and an upper limit.
- a swivel angle 182 (cf Figure 19(a) ) is in particular quantitative as an angle between the second longitudinal axis 42 of the support rod device 36 and a plane 184 parallel to the installation surface 14.
- a minimum pan angle 182, i.e. the lower limit, is 0° or greater than 0°.
- the lower limit is less than 50° and preferably less than 40° and particularly preferably less than 30°.
- the lower limit is determined by the support rod device 36 resting against an underside which encloses the free space 102 (cf figure 9 ) limited, predetermined.
- the lower limit can be approximately 0° and can in particular be less than 10° and preferably less than 5°.
- the swivel angle range has an upper limit ( Figure 19(b) ).
- the upper limit of the swivel angle 182 is specified as the detent position ( figure 19 ). In particular, it is in the range between 80° and 120° of the pivot angle 182. In a preferred exemplary embodiment, it is approximately 90° ( Figure 19(b) ).
- the upper limit is such that a parking position with a latching position with respect to the cleaning head 12 is provided for the holding rod device 36, in which case pivoting with respect to the cleaning head 12 is blocked in the Meaning that an increased expenditure of force is necessary in order to enable pivoting of the holding rod device 36 on the pivot joint 84 about the pivot axis 40 again.
- the holder-receptacle combination 162 has been described as having a holder 154 which is fixedly connected to the base 30 and a receptacle 160 which is arranged on the dirty fluid tank device 32 .
- the holder 154 is rod-shaped and the receptacle 160 is an opening.
- a kinematic reversal is also possible, in which a rod-shaped element is arranged on the dirty fluid tank device 32 and a corresponding receptacle in the form of an opening on the base 30.
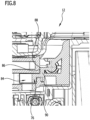
- a locking device 186 ( figures 10 , 12 ) intended.
- the locking device 186 comprises one and in particular at least two and preferably exactly two ( figures 10 , 12 ).
- the pin-plunger combinations 188 are located in the area of the pivot joint 84 .
- FIG 9 a first location 190 and a second location 192 are shown at which respective pin-plunger combinations 188 are positioned.
- the first point 190 and the second point 192 are mirror-symmetrical to the center plane 94.
- the pin-immersion opening combination 188 each includes an immersion opening 194 which is arranged on the cleaning head 12 and in particular on the base 30 in a rotationally fixed manner with respect to the web guide device 86 .
- a pin 196 is provided as a counter-element to the corresponding immersion opening 194 and is connected to the holding rod device 36 in a torque-proof manner and can be pivoted with it about the pivot axis 40 relative to the cleaning head 12 .
- the pin 196 is seated on a guide 198 and is linearly translatable along a translation axis 200.
- the translation axis 200 is movable with the pivotal movement of the support rod assembly 36 relative to the cleaning head 12. It is oriented transversely to a circumference of circular path section 88 .
- the pin 196 is spring-loaded via a spring device 202, with a spring force of the spring device 202 tending to press the pin 196 in the direction of the circumference of the circular path section 88.
- the spring force of the spring device 202 acts on the cleaning head 12 .
- the pin 196 has a ridge 204 ( figure 10 ), which is arranged in a ring.
- the guide 198 has an annular stop 206 for the bead 204 .
- a stop for the linear displaceability of the pin 196 on the guide 198 is formed by the bead 204 resting against the stop 206 ( figure 10 ).
- a basic position of the pin 196 is such that the spring device 202 presses the pin 196 to the circumference of the circular path section 88 until the bead 204 rests against the stop 206 ( figure 10 ). This basic position is present when the pin 196 has not entered the immersion opening 194 .
- the basic position is in turn present when the parking position 185 of the holding rod device 36 and the cleaning head 12 has not been reached, ie when the upper limit of the pivoting angle 182 has not been reached. See figure 10 , wherein the pin 196 is not immersed in the immersion hole 194.
- the respective immersion opening 194 is formed on a block element 208 .
- the block element 208 includes the immersion opening 194 as a recess or drilling.
- a first inclined plane 210 is arranged or formed on the block element 208 outside the immersion opening 194 . This rises from the circular path section 88 . It is located at the end of the circular path section 88 and at the first inclined plane 210 the distance to the pivot axis 40 increases.
- the first inclined plane 210 is used to insert the pin 196 into the immersion opening 194 while displacing the pin 196 away from the stop 206 with a corresponding exertion of force against the spring force of the spring device 202 . This effort must be applied by an operator.
- the pin 196 has a first contact surface 212 which is formed on a front end of the pin 196 .
- the first contact surface 212 is adapted to the first inclined plane 210 .
- the immersion opening 194 formed in the block element 208 has a wall formed as a second inclined plane 214 .
- the pin 196 is guided along the circular path section 88 while increasing the pivoting angle 182 and then over the first inclined plane 210 into the immersion opening 194.
- the second inclined plane 214 serves to guide the pin 196 out of the immersion opening 194 by reducing the pivoting angle 182 starting from the upper limit.
- the pin 196 has a second contact surface 216 which is adapted to the second inclined plane 214 .
- the second contact surface 216 is guided in contact with the second inclined plane 214 along the second inclined plane 214 (with the pivoting angle 182 being reduced). To do this, the spring force of the spring device 202 must be overcome.
- the first incline 210 has a smaller angle than the second incline 214.
- the force required to release the latch by extending the pin 196 out of the plunger opening 194 is greater than the force required , in order to bring the pin 196 into the immersion opening 194 via the second inclined plane 214 and to establish the locking and thereby to reach the parking position 185.
- An alternate embodiment of a pin 196' ( figure 14 ) has a contact surface 197 at a tip, which is conical.
- the pin is spherically shaped at the tip (in figure 14 indicated in broken lines).
- the pin 196 or the pin 196' is made in particular from a metallic material.
- a tip 218 preferably rests on this circular path section 88 between the first contact surface 212 and the second contact surface 216 .
- a circular path section 88 is also possible for a circular path section 88 to be provided which is separate from this circular path section 88 for the counter-device 90 but is concentric with the pivot axis 40 .
- an operator can, by exerting a correspondingly large amount of force by exerting a torque on the holding rod device 36 in the direction of the floor 16 to be cleaned, on which the floor cleaning machine 10 is properly positioned via the cleaning head 12, cancel the locking and remove the corresponding pin 196 from the Immersion opening 194 lead. It is then possible to pivot freely up to the lower limit.
- an operator pivots the holding rod device 36 about the pivot axis 40 towards the parking position 185 until the parking position 185 is reached by locking the pin 196 into the associated immersion opening 194 is.
- an intermediate position is shown shortly before reaching the locked position.
- FIG 19(a) a "work" pivot position is shown.
- the pivot angle 182 is between the lower limit and the upper limit.
- the floor 16 to be cleaned can be worked on by the floor cleaning machine 10 in order to carry out a cleaning process.
- An operator adapts the swivel angle 182 to his height. If a piece of furniture or the like is to be driven under, the pivoting angle 182 is reduced.
- the operator guides the cleaning head 12 over the floor 16 to be cleaned using the holding rod device 36 with the adjusted swivel angle 182.
- the cleaning roller unit 18 rotates about the axis of rotation 46. Due to the direction of rotation 52, the cleaning head 12 and thus the floor cleaning machine 10 experience a propulsion.
- the support rod device 36 is connected directly to the roller mount 106 and thus to the cleaning roller unit 18 .
- the cleaning roller unit 18 With a pivoting movement of the holding rod device 36 about the pivot axis 40, the cleaning roller unit 18 is also pivoted. If this is supported on the floor 16 to be cleaned, then it rolls off on the floor 16 . This movement is superimposed on the rotation of the cleaning roller unit 18 about the axis of rotation 46 and has no negative effect on the cleaning result or the like. Due to the rotation of the cleaning roller unit 18, the angular range through which the cleaning roller unit 18 runs in the same time unit as during a pivoting movement is very much larger.
- the support rod device 36 is directly connected to the cleaning roller unit 18 and its weight acts directly on the cleaning roller unit 18.
- the weight of the support rod device 36 presses the cleaning roller unit 18 with the roller parts 116, 118 against the floor 16 to be cleaned.
- the support rod device 36 acts by its own weight a pressing force of the cleaning roller unit 18 on the floor 16 to be cleaned. This improves the cleaning effect; the mechanical action of the cleaning roller unit 18 on the floor 16 to be cleaned is improved.
- the ability of the floor cleaning machine 10 to remove dirt is improved.
- the described design of the swivel joint 84 as an orbital swivel joint results in a large swivel range between the lower limit and the upper limit.
- the operator increases the swivel angle 182 until the parking position 185 is reached ( Figure 19(b) ) and the retaining rod device 36 is locked to the cleaning head 12 via the locking device 186 .
- the support rod device 36 cannot “fall down” of its own accord (because of its own weight), with the pivoting angle 182 decreasing in the direction of the lower limit.
- the floor cleaning machine 10 is parked, for example for storage.
- a corresponding cleaning station or parking station (not shown in the figures).
- the dirty fluid tank device 32 can also be emptied in the ground station.
- the dirty fluid tank device 32 can also be easily removed from the cleaning head 12 ( figure 19(c),(d) ).
- This torque application occurs in the park position 185 where the support rod assembly 36 is locked to the base 30 by the latch assembly 186 . If necessary, the pivoting angle 182 can be increased somewhat by providing play in the play/immersion opening combinations 188 . When this play is exhausted, the cleaning head 12, which is then in particular still supported on the floor 16 via the cleaning roller unit 18, rotates relative to the dirty fluid tank device 32.
- the base 30 is raised relative to the dirty fluid tank device 32.
- the dirty fluid tank device 32 remains on the floor 16 as a result of the operator intervention on the foot strap 34 .
- An operator has fixed the dirty fluid tank device 32 on the floor 16 via the force 220 .
- the cleaning head 12 it is also possible for the cleaning head 12 to be removed from the dirty fluid tank device 32 by pulling it upwards, with an operator fixing the dirty fluid tank device 32 to the floor 16 by exerting force on the foot strap 34 .
- Figure 1 shows a situation which arises after the dirty fluid tank assembly 32 has been detached from the cleaning head 12, either by pivotal lifting or by pulling straight up.
- the cleaning head 12 in the support rod assembly 36 is finally removed from the dirty fluid tank assembly 32 .
- FIG 19(e) a situation is shown in which the cleaning head 12 is placed back onto the dirty fluid tank device 32, that is to say in which the dirty fluid tank device 32 is fixed to the cleaning head 12.
- the dirty fluid tank device 32 is placed on the floor 16 . If necessary, an operator fixes the dirty fluid tank device 32 to the floor 16 by exerting force on the foot strap 34.
- the cleaning head 12 is then placed from above onto the dirty fluid tank device 32 in such a way that the corresponding holder 154 is immersed in the associated receptacle 60 on the dirty fluid tank device 32 until it latches (and then correspondingly the respective second element 166 in the associated receiving area 168 of the first element 164).
- the cleaning head 12 is preferably set down with the holding rod device 36 in a parking position 185 relative to the cleaning head 12, i.e. with the holding rod device 36 being locked on the cleaning head 12 by the locking device 186.
- the corresponding design of the first surface area 172 and the second surface area 14 preferably requires a greater force to remove the dirty fluid tank device 32 from the cleaning head 12 ( Figures 19(c) and (d) ) necessary than for fixing ( Figure 19(e) ).
- an operator can remove the dirty fluid tank device 32 from the cleaning head 12 and insert the dirty fluid tank device 32 in the cleaning head 12 hands-free, i.e. he does not have to touch the dirty fluid tank device 32 for this purpose.
- he can carry out the corresponding processes by grasping and holding the holding rod device 36 . He doesn't have to bend down or bend his knees.
- the stripping element 70 is movably arranged on the cleaning head 12 and on the base 30 via the holder 72 .
- the holder 72 has a base 222 .
- the base 222 has a rear end 224 and a front end 226.
- the base 222 is wider toward the front end 226 than at the rear end 224; the base 222 has a first portion 228 and a second portion 230, with the first portion 228 having the rear end 224 and the second portion 230 having the front end 226.
- the holder 72 is held pivotably on the base 30 of the cleaning head 2 via the first area 228 .
- the second area 230 carries the stripping element 70 and a comb element 232.
- stub shafts 234 Arranged on the first region 228 are stub shafts 234 which protrude laterally outwards. Shaft stubs 234 are provided opposite one another and are aligned in alignment. A pivot axis 236 is defined by the stub shafts 234 . When the holder 72 is fixed to the base 30, the pivot axis 236 is parallel to the pivot axis 40 or parallel to the axis of rotation 46. It is parallel to the installation surface 14.
- the cleaning roller unit 18 there is provision for the cleaning roller unit 18 to have a continuous stripping element 70 which acts both on the first roller part 116 and on the second roller part 118 ( Figure 25(a) ). In particular, no recess or the like is provided for the central part 114 .
- the stripping element 70 extends continuously between a first front end 238 and an opposite second front end 240.
- the stripping element 70 is arranged or formed as a web on the second region 230 .
- this web is integrally connected to the second region 230, that is, integrally connected to the holder 72.
- the comb element 232 is also seated on the holder 72. It acts on the cleaning roller unit 18 and serves to collect hair; the comb element 232 is a hair comb.
- the comb element 232 includes at least one row 242 and in particular a plurality of rows 242 of pins 244. Adjacent pins 244 are spaced apart from one another. A pin dips into a trimming 246 (compare, for example figure 20 ) of the cleaning roller unit 18 to a certain extent "filter out” hair from the cleaning roller unit 18.
- the comb element 232 is arranged downstream of the stripping element 70 .
- a portion of the cleaning roller unit 18 which rotates in the direction of rotation 52 starting from the base 16 first passes the stripping element 70 and then the comb element 232 . This results in a space-optimized arrangement.
- the comb element 232 (rows 242) are arranged on the second region 230 between the front end 226 and the stripping element 70 (cf figure 30 ).
- the comb element 232 extends over a smaller transverse length than the stripping element 70, i.e. a distance between the outer ends of the comb element 232 is smaller than a distance between the front ends 238 and 240 of the stripping element 70 ( figure 30 ).
- the holder 72 is pivotally supported on the base 30 . It is spring-loaded in order to press the stripping element 70 and the comb element 232 into the trimming 246 .
- a corresponding spring device is provided, which is arranged, for example, in the area of the shaft stub 234 on the corresponding pivot bearing 250 . this is in figure 20 indicated by reference numeral 252.
- a corresponding spiral spring of the spring device is supported on the base 30 and on the second area of the holder 72 in order to press it against the cleaning roller unit 18 .
- the stripping element 70 is arranged as a web 254 on the second area 30 .
- This web 254 has a first flank 256 which faces the mouth opening 56 . It has an opposite second flank 258 which faces away from the mouth opening 56 ( figure 20 ).
- the second flank 258 faces the comb element 232 .
- An edge 260 lies between the first flank 256 and the second flank 258.
- a contact line 262 ( figure 25 ) educated. This corresponds to the course of the edge and can be described by a mathematical curve.
- the web 254 of the stripping element 70 has a triangular shape across the first flank 256 and the second flank 258 (cf figure 20 ).
- the contact line 262 has a finite width.
- the contact line 262 is in the stocking 246 (compare figure 20 ) or at least rests against the trimming 246. Via the contact line 262, the stripping element 70 rests on or dips into the trimming 246.
- the stripping element 70 is designed as a guide element for dirty fluid on the cleaning roller unit 18 .
- the training is in one embodiment ( Figure 25(a) ) Such that dirty fluid over the scraper 70 not only is detached from the cleaning roller unit 18 (from the facing 246), but is also guided in a defined manner to a middle region 264.
- This middle area 264 lies on the cleaning roller unit 18 and on the scraper element 70 .
- dirt fluid (to a large extent) is coupled into the orifice opening 56 .
- the central area 264 lies at the central plane 94.
- the stripping element 70 is curved.
- the line of contact 262 has a first length L 1 (arc length) between the first front end 238 and the second front end 240 .
- a distance D between the first front end 238 and the second front end 240, a distance direction for the distance D being parallel to the pivot axis 236 or parallel to the pivot axis 40 or parallel to the rotation axis 46, is smaller than this length L 1 .
- the cleaning roller unit 18 (as a combination of the first cleaning roller 116 and the second cleaning roller 118 with spacing in between) has a second length in the spacing direction (i.e. parallel to the axis of rotation 46).
- L 2 on (compare figure 4 ), which is smaller than the length L 1 .
- the curvature of the stripping element 70 at the contact line 262 can be two-dimensional or three-dimensional in the sense that a mathematical curve that describes the course of the contact line 262 and is a curved curve can be a flat curve (two-dimensional curvature) or a space curve (three-dimensional curvature) can be.
- the corresponding curve which mathematically describes the course of the contact line 262
- has a first curvature in the sense of a differential geometric curvature
- the first curvature is negative, ie the corresponding mathematical curve describing the course of the contact line 262 is concave, or the first curvature and the second curvature are both negative and the corresponding curve is a concave curve.
- a discharge area for dirty fluid from the cleaning roller unit 18 into the dirty fluid tank device 32 is formed by the mouth device 54 .
- the contact line 262 is concave towards this dispensing area, ie towards the mouth opening 56 . This concave formation is on the first flank 256.
- a convex configuration is present on the second flank 258, ie facing away from the dispensing area (the orifice opening 56).
- a corresponding concave area 266 and a convex area 268 are shown in FIG figure 25 shown.
- the line of contact 262 has the shape of a segment of a circular arc.
- the corresponding mathematical curve which describes the course of the contact line 262, has a constant curvature.
- a first curvature can be provided, which is constant, and if the contact line 262 can be described by a space curve, a constant second curvature can be present.
- a radius of curvature R lies in the range between 2L 2 and 6L 2 (2L 2 ⁇ R ⁇ 6L 2 ).
- the stripping element 70 has an apex 270 across the contact line 262, which in one embodiment (cf. Figure 25(a) ) is located at the center plane 94.
- the course of the mathematical curve, which describes the course of the contact line 262, can be described in cylindrical coordinates.
- a projection of the contact line 262 onto an (imaginary) cylinder 272 ( Figure 25(a) ) with a cylinder axis 274 can be considered.
- the contact line 262 is related to the vertex 270 or the center plane 94 mirror-symmetrical ( Figure 25(a) ).
- a polar angle ⁇ varies along the course of the curve.
- figure 21 12 is a section through the cleaning head 12 at point A according to FIG figure 25 shown, and in figure 22 a cut at point B (i.e., at vertex 270).
- the cleaning roller unit 18 there is a guide area on the surface of the cleaning roller unit 18 and also in a penetration area of the scraping element 70 due to the curvature of the scraping element 70 for dirty fluid, via which dirty fluid on the cleaning roller unit 18 is conducted to the central area 264 by means of the stripping element 70 .
- the discharge area can be made smaller in relation to the distance direction parallel to the axis of rotation 46, i.e. the orifice opening 56 can be made with a smaller length L 3 than, for example, with a straight scraping element 70.
- a smaller transfer area for dirty fluid to the dirty fluid tank device 32 can thereby be implemented . Dirty fluid delivery is simplified and device contamination is reduced.
- any foam that occurs on the cleaning roller unit 18 is guided to the middle region 264 by the scraper element 70 .
- the emergence of foam at the front ends of the cleaning roller unit 18 is reduced or at least greatly reduced.
- a stripping element 70 was described, which is assigned to the cleaning roller unit 18 with the first roller part 116 and the second roller part 118 and in which the apex 270 is arranged on a central plane.
- FIG 25(b) an alternative exemplary embodiment is shown with a stripping element which is not designed to be continuous.
- Each roller part 116 or 118 is assigned its own stripping element, with these stripping elements in particular being arranged on a single holder (the holder 72).
- FIG 25 a contact line 262' for the exemplary case of the first roller part 116 is shown.
- the first roller part has a length L 2 ⁇ .
- This length L 2 * lies between the corresponding end faces of the first roller part 116 (or of the second roller part 118).
- the corresponding edge element has edge progression 262' which is symmetrical.
- the corresponding stripping element which is assigned to the first roller part 116 (or the second roller part 118), is curved in a circular shape, with a radius of curvature R* lying in particular in the range between 2L 2 ⁇ and 6L 2 ⁇ (2L 2 ⁇ ⁇ R* ⁇ 6L 2 ⁇ ).
- the combination of scraping elements has a "double hump" shape, in which combination the respective scraping elements can then be spaced or continuous.
- the corresponding curved profile of the stripping element 70 is asymmetrical and has no apex or no apex at a midplane.
- a targeted drainage of dirty fluid to one side 310 ( figure 26 ) or to a page 312 ( figure 27 ) take place.
- the course is as shown in FIG Figures 26 or 27 asymmetrical. If, for example, for the first roller part 116 according to the course figure 26 is present and for the second roller part 118 the course according to figure 27 , the overall profile is symmetrical in relation to the cleaning roller unit 18 with the first roller part 116 and the second roller part 118 . In this embodiment, in particular, there is a derivation to the outside.
- the embodiment of the curved stripping element is also possible if the cleaning roller unit has only one roller part.
- the configuration of the stripping element 70 with a curvature has been described with reference to the floor cleaning machine 10 .
- This solution of the curved design can also be used on other types of surface cleaning machines, such as on a self-propelled and self-steering cleaning machine (cleaning robot).
- the floor cleaning machine 10 works as follows: For a cleaning operation, the cleaning head 12 is set up on the floor 16 to be cleaned. An operator guides the cleaning head 12 over the holding bar device 36 over the floor 16 to be cleaned.
- cleaning fluid is supplied from the tank device 50 for cleaning fluid, in particular to the cleaning roller unit 18.
- the floor 16 to be cleaned is thereby moistened for better dirt removal. Dirt is taken along and transported to the stripping element 70 via the cleaning roller unit 18 . Dirty fluid, which is then in particular liquid with dirt particles, is detached from the cleaning roller unit 18 and conveyed into the dirty fluid tank device 32 .
- the guiding element function of the stripping element 70 due to the corresponding curvature results in a simplified discharge of dirty fluid.
- Coarse dirt can also be picked up.
- the sweeping element 62 ensures that coarse dirt is fed to the cleaning roller unit 18. This transports the coarse dirt directly into the dirt fluid tank device 32 and/or it is detached via the stripping element 70.
- Hair is removed from the cleaning roller unit 18 via the comb element 232 .
- the cleaning roller unit 18, in which the covering 246 is a textile material, is used in particular for a wet cleaning operation.
- the cleaning roller unit 18 can also be used for a sweeping operation.
- the cleaning roller unit 18 it is also possible, for example for a sweeping process, for the cleaning roller unit 18 to be exchanged and a cleaning roller unit to be used in which the trimmings are bristles.
- the floor-cleaning machine 10 allows for a purely dry cleaning or a wet cleaning, as required.
- the holding rod device 36 is supported on the cleaning roller unit 18 by the orbital joint 84 and a corresponding pressing force is exerted on the floor 16 to be cleaned.
- a corresponding pressing force is exerted on the floor 16 to be cleaned.
- the cleaning roller unit 18 experiences a maximum contact pressure via the holding rod device 36 via the floor cleaning machine 10 itself.
- the dirty fluid tank device 32 always remains in the same position relative to the floor 16 to be cleaned.
- the sweeping element 62 can also be kept in the same position relative to the floor 16. This results in improved pick-up of coarse dirt and improved cleaning overall.
- the provision of the foot strap 34 and the parking position 185 allow the dirty fluid tank device 32 to be easily removed from the cleaning head 12 or the cleaning head 12 to be easily placed on the dirty fluid tank device 32 .
- an operator does not have to touch the dirty fluid tank device 32 with his hands in order to remove it or to insert it.
- the design of the swivel joint 84 as an orbital joint ensures that in every swivel position of the holding rod device 36 relative to the cleaning head 12 about the swivel axis 40 within the swivel angle range, the dirty fluid tank device 32 still assumes the same position in relation to the floor 16 and is parallel to the floor 16 remains.
- the at least one support element 120 which is arranged on the base 30 (and not on the dirty fluid tank device 32), results in a optimized support of the weight of the cleaning head 12 with the dirty fluid tank device 32 on the floor 16 to be cleaned.
- a dirty fluid tank device 32 with a relatively large holding volume for dirty fluid can be implemented.
- Rotatability about the axis of rotation 41 is provided on the holding rod device 36, in particular in relation to the handle 38.
- the holding rod device 36 comprises a first part 278 and a second part 280 , the second part 280 being rotatable about the axis of rotation 41 relative to the first part 278 .
- first portion 278 is coincident with the first portion 76 and the second portion 280 is coincident with the second portion 78 of the support rod assembly 36 .
- the pivot 41 is coaxial with the first longitudinal axis 80. In principle, however, it is also possible for the pivot axis 41 to be parallel to the second longitudinal axis 42, for example. An exemplary embodiment is described below in which the axis of rotation 41 is parallel to the first longitudinal axis 80 .
- the drive motor 98 and the transmission device 104 in particular do not rotate. These are arranged on the first part 278 .
- a locking device 282 is provided ( Figures 15 to 18 ), which on the one hand releases the rotatability of the second part 280 to the first part 278 (of the second area 78 to the first area 76) outside of a locking position 284 ( figures 15 , 16 ) and in the locked position 284 the rotatability of the second part 280 of the support rod means 36 to the first part 278 of the support rod device 36 about the axis of rotation 41 locks ( figures 17 , 18 ).
- the locking device 284 includes a slide 288 which is arranged to be movable and in particular linearly movable on the first part 278 (on the first region 76).
- a displacement axis 289 is in particular parallel to the axis of rotation 41.
- the slide 288 has a nose 290 in the area of a first end (cf figure 16 ) on.
- the slide 288 can be supported on the cleaning head 12 and there on a corresponding mating surface 292 via this nose 290 .
- the lug 290 is at a distance from the mating surface 292.
- the lug 290 acts on the counter surface 292 and this causes a displacement of the slide 288 in the displacement direction 289.
- the slide 288 is spring-supported and is mounted on the first part 278 via a spring device 294.
- the spring device is arranged and designed in such a way that it presses the slide 288 with the lug 290 in the direction of the cleaning head 12 .
- the spring force of the spring device 294 must be overcome. This overcoming of the spring force of the spring device 294 occurs when the parking position 185 is reached.
- the slide 288 is displaced as a whole in the direction of the second part 280.
- the slide 288 has an immersion element 296 .
- the immersion element 296 can dip into a corresponding immersion opening 298 of the second part 280 in the parking position 185 . This is a form fit in terms of rotatability about the axis of rotation 41 is reached and the second part 280 of the support rod device 36 (the second area 78) can no longer rotate about the axis of rotation 41 relative to the first part 278 (the first area 76).
- the slider 288 When the support rod device 36 is brought into the parking position 185, the slider 288 is pushed as a whole in the direction of the second part 280 and the immersion element 296 immerses into the immersion opening 298 (with the second part 280 being aligned appropriately with respect to the first part 278) and in the corresponding locking position 284, the ability of the second part 280 to rotate relative to the first part 278 about the axis of rotation 41 is blocked.
- the spring device 294 acts on the slide 288 in such a way that it moves it in the direction of the cleaning head 12 or holds it there.
- the immersion element 296 is then immersed out of the immersion opening 298 and outside the locking position 284 the second part 280 can be rotated relative to the first part 278 about the axis of rotation 41 .
- the locking device 284 has an overload protection 300 .
- This overload protection 300 essentially serves to prevent damage in the event of twisting about the axis of rotation 41 in the parking position 185 .
- the slide 288 is formed in (at least) two parts with a first part 302 and a second part 304.
- the nose 290 is seated on the first part 302.
- the immersion element 296 is seated on the second part 304.
- the second part 304 is slidably mounted on the first part 302 , with support being provided by a spring device 306 .
- spring device 306 is “hard” in comparison to spring device 294 and in particular significantly harder than spring device 294.
- the spring force of the spring device 306 acts in such a way that it pushes the second part 304 away from the first part 302 until a stop 308 (cf figure 16 ) of the second part 304 at the first part 302 is reached.
- the slide 288 can be moved as a whole with the first part 302 and the second part 304 in the direction of displacement 289 .
- the slider 288 with the first part 302 and the second part 304 can accordingly reach the locking position 284 in the parking position 185 and can lie outside of the parking position 185 outside of the locking position 284 and enable the rotation of the second part 280 to the first part 278 about the axis of rotation 41 .
- the slide 288 In the locking position 284, the slide 288 cannot deviate in relation to the direction of displacement 289 or at most deviate with a certain amount of play.
- a movement blockage towards the cleaning head 12 is effected by the nose 290 .
- this blocking of movement is achieved by the immersion element 296 immersed in the immersion opening 298 .
- the slider 288 cannot deviate as a whole in the displacement direction 289. Due to the multi-part design of the slide 288, however, the second part 304 can move relative to the first part 302 by overcoming the spring force of the spring device 306 and can move away from the stop 308. As a result, the immersion element 296 in particular can move out of the immersion opening 298 . This reduces the risk of damage, since evasion is made possible.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Cleaning By Liquid Or Steam (AREA)
- Vehicle Cleaning, Maintenance, Repair, Refitting, And Outriggers (AREA)
- Cleaning In General (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102021134577.4A DE102021134577A1 (de) | 2021-12-23 | 2021-12-23 | Bodenreinigungsmaschine mit Trittlasche und Verfahren zur Abnahme einer Schmutzfluidtankeinrichtung von einem Reinigungskopf |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP4201284A1 true EP4201284A1 (fr) | 2023-06-28 |
| EP4201284B1 EP4201284B1 (fr) | 2024-07-17 |
Family
ID=84519355
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP22213142.7A Active EP4201284B1 (fr) | 2021-12-23 | 2022-12-13 | Machine de nettoyage de sol dotée d'une languette de préhension et procédé de retrait d'un dispositif de réservoir de fluide sale à partir d'une tête de nettoyage |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP4201284B1 (fr) |
| CN (1) | CN116369793A (fr) |
| DE (1) | DE102021134577A1 (fr) |
Citations (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3789449A (en) | 1972-06-21 | 1974-02-05 | Scott & Fetzer Co | Hard surface floor cleaner |
| US4173054A (en) | 1977-08-11 | 1979-11-06 | Hukuba Kogyo Kabushiki Kaisha | Floor sweeper |
| US4875246A (en) | 1988-07-22 | 1989-10-24 | Quad Research, Inc. | Surface treating device |
| US6026529A (en) | 1995-06-07 | 2000-02-22 | Caruso; Steven Jerome | Automated rotary mopping, waxing, and light sweeping systems |
| DE10357637A1 (de) | 2003-12-10 | 2005-07-07 | Vorwerk & Co. Interholding Gmbh | Selbstfahrendes oder zu verfahrendes Kehrgerät sowie Kombination eines Kehrgeräts mit einer Basisstation |
| WO2005087075A1 (fr) | 2004-03-15 | 2005-09-22 | Aktiebolaget Electrolux | Instrument de nettoyage de plancher |
| US20060272120A1 (en) | 2005-06-01 | 2006-12-07 | Kenneth Barrick | Extraction cleaner |
| DE102007054500A1 (de) | 2006-11-23 | 2008-05-29 | Vorwerk & Co. Interholding Gmbh | Verfahrbares Haushalts-Bodenreinigungsgerät sowie Befeuchtungseinrichtung für eine Wischwalze |
| CN201197698Y (zh) | 2008-05-25 | 2009-02-25 | 袁哲 | 电动拖把 |
| DE202009013434U1 (de) | 2008-10-16 | 2009-12-17 | Koninklijke Philips Electronics N.V. | Vorrichtung zur Fußboden-Nassreinigung |
| US7665174B2 (en) | 2005-05-05 | 2010-02-23 | Tennant Company | Cleaning head for use in a floor cleaning machine |
| WO2010041185A1 (fr) | 2008-10-07 | 2010-04-15 | Koninklijke Philips Electronics N.V. | Dispositif de nettoyage à brosses rotatives |
| US20100251505A1 (en) | 2010-03-12 | 2010-10-07 | Euro-Pro Operating, Llc | Cleaning appliance having multiple functions |
| US7921497B2 (en) | 2006-09-28 | 2011-04-12 | Kimberly-Clark Worldwide, Inc. | Carpet stain removal device |
| US20130167320A1 (en) * | 2011-12-30 | 2013-07-04 | Andrew Q. Liu | Vacuum cleaner with display |
| WO2013106762A2 (fr) | 2012-01-13 | 2013-07-18 | Kent Research Corporation | Machines de nettoyage de surface et méthodes d'utilisation |
| DE202015101302U1 (de) | 2015-03-13 | 2015-04-08 | Vorwerk & Co. Interholding Gmbh | Reinigungsgerät in Form eines Staubsaugers oder Vorsatzgerätes für einen Staubsauger |
| WO2015086083A1 (fr) | 2013-12-12 | 2015-06-18 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage des sols |
| WO2016058901A1 (fr) | 2014-10-13 | 2016-04-21 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces dotée d'un dispositif d'humidification |
| WO2016058907A1 (fr) | 2014-10-13 | 2016-04-21 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces |
| WO2016058879A1 (fr) | 2014-10-13 | 2016-04-21 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces et procédé permettant de faire fonctionner une machine de nettoyage de surfaces |
| WO2016058856A1 (fr) | 2014-10-13 | 2016-04-21 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces |
| CN205181256U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器及其清洁筒清理结构 |
| CN205181251U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器、清洁筒组件及海绵筒 |
| CN205181250U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器 |
| CN205359367U (zh) | 2016-01-13 | 2016-07-06 | 南京信息工程大学 | 一种小型手持式楼道清扫机 |
| DE202016105299U1 (de) | 2015-10-12 | 2016-10-19 | Hizero Technologies Co., Ltd. | Bodenreinigungsvorrichtung und Abfluss derselben |
| DE202016105301U1 (de) | 2016-09-23 | 2016-10-19 | Hizero Technologies Co., Ltd. | Bodenreinigungsvorrichtung |
| DE202016105300U1 (de) | 2016-09-23 | 2016-10-21 | Hizero Technologies Co., Ltd. | Bodenreinigungsvorrichtung, Reinigungstrommelanordnung und Schwammtrommel |
| WO2017059602A1 (fr) | 2015-10-10 | 2017-04-13 | 深圳市赫兹科技有限公司 | Appareil de nettoyage de sol, et structure pour dégager un rouleau de nettoyage de ce dernier |
| WO2017059600A1 (fr) | 2015-10-10 | 2017-04-13 | 深圳市赫兹科技有限公司 | Nettoyeur de sol |
| WO2017059601A1 (fr) | 2015-10-10 | 2017-04-13 | 深圳市赫兹科技有限公司 | Dispositif de nettoyage de sol, élément de rouleau de nettoyage, et rouleau en éponge |
| WO2017059603A1 (fr) | 2015-10-10 | 2017-04-13 | 深圳市赫兹科技有限公司 | Dispositif de nettoyage de sol et sa structure de récipient d'eau |
| US9622637B1 (en) | 2016-03-18 | 2017-04-18 | Protrend Co., Ltd. | Combined mop |
| WO2017063663A1 (fr) | 2015-10-12 | 2017-04-20 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces |
| US20170119225A1 (en) | 2015-10-28 | 2017-05-04 | Bissell Homecare, Inc. | Surface cleaning apparatus |
| US20170127901A1 (en) | 2013-03-01 | 2017-05-11 | Bissell Homecare, Inc. | Surface cleaning apparatus |
| CN107007215A (zh) | 2017-06-02 | 2017-08-04 | 深圳市得城网络科技有限公司 | 具有旋转式人体感应器的自动扫地机器人 |
| CN206687671U (zh) | 2016-11-10 | 2017-12-01 | 唐飞宇 | 一种新型便携式地面污物清理装置 |
| AU2017101723A4 (en) | 2016-12-16 | 2018-01-18 | Bissell Inc. | Surface cleaning apparatus |
| DE202018104772U1 (de) | 2018-08-20 | 2018-09-07 | Hizero Technologies Co., Ltd. | Schmutzwassersammel- und -detektionsmechanismus und Reinigungsvorrichtung |
| DE102017120723A1 (de) | 2017-09-08 | 2019-03-14 | Alfred Kärcher SE & Co. KG | Reinigungsmaschinen-Station für eine Reinigungsmaschine, Reinigungsmaschine und Kombination aus Reinigungsmaschinen-Station und Reinigungsmaschine |
| WO2021013343A1 (fr) | 2019-07-24 | 2021-01-28 | Alfred Kärcher SE & Co. KG | Machine de nettoyage de sols |
| WO2021043425A1 (fr) * | 2019-09-06 | 2021-03-11 | Alfred Kärcher SE & Co. KG | Machine de nettoyage du sol et procédé permettant de faire fonctionner une machine de nettoyage du sol |
-
2021
- 2021-12-23 DE DE102021134577.4A patent/DE102021134577A1/de active Pending
-
2022
- 2022-12-13 EP EP22213142.7A patent/EP4201284B1/fr active Active
- 2022-12-21 CN CN202211647255.8A patent/CN116369793A/zh active Pending
Patent Citations (45)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3789449A (en) | 1972-06-21 | 1974-02-05 | Scott & Fetzer Co | Hard surface floor cleaner |
| US4173054A (en) | 1977-08-11 | 1979-11-06 | Hukuba Kogyo Kabushiki Kaisha | Floor sweeper |
| US4875246A (en) | 1988-07-22 | 1989-10-24 | Quad Research, Inc. | Surface treating device |
| US6026529A (en) | 1995-06-07 | 2000-02-22 | Caruso; Steven Jerome | Automated rotary mopping, waxing, and light sweeping systems |
| DE10357637A1 (de) | 2003-12-10 | 2005-07-07 | Vorwerk & Co. Interholding Gmbh | Selbstfahrendes oder zu verfahrendes Kehrgerät sowie Kombination eines Kehrgeräts mit einer Basisstation |
| WO2005087075A1 (fr) | 2004-03-15 | 2005-09-22 | Aktiebolaget Electrolux | Instrument de nettoyage de plancher |
| US7665174B2 (en) | 2005-05-05 | 2010-02-23 | Tennant Company | Cleaning head for use in a floor cleaning machine |
| US20060272120A1 (en) | 2005-06-01 | 2006-12-07 | Kenneth Barrick | Extraction cleaner |
| US7921497B2 (en) | 2006-09-28 | 2011-04-12 | Kimberly-Clark Worldwide, Inc. | Carpet stain removal device |
| DE102007054500A1 (de) | 2006-11-23 | 2008-05-29 | Vorwerk & Co. Interholding Gmbh | Verfahrbares Haushalts-Bodenreinigungsgerät sowie Befeuchtungseinrichtung für eine Wischwalze |
| CN201197698Y (zh) | 2008-05-25 | 2009-02-25 | 袁哲 | 电动拖把 |
| WO2010041185A1 (fr) | 2008-10-07 | 2010-04-15 | Koninklijke Philips Electronics N.V. | Dispositif de nettoyage à brosses rotatives |
| DE202009013434U1 (de) | 2008-10-16 | 2009-12-17 | Koninklijke Philips Electronics N.V. | Vorrichtung zur Fußboden-Nassreinigung |
| US20100251505A1 (en) | 2010-03-12 | 2010-10-07 | Euro-Pro Operating, Llc | Cleaning appliance having multiple functions |
| US20130167320A1 (en) * | 2011-12-30 | 2013-07-04 | Andrew Q. Liu | Vacuum cleaner with display |
| WO2013106762A2 (fr) | 2012-01-13 | 2013-07-18 | Kent Research Corporation | Machines de nettoyage de surface et méthodes d'utilisation |
| US20170127901A1 (en) | 2013-03-01 | 2017-05-11 | Bissell Homecare, Inc. | Surface cleaning apparatus |
| WO2015086083A1 (fr) | 2013-12-12 | 2015-06-18 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage des sols |
| WO2016058856A1 (fr) | 2014-10-13 | 2016-04-21 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces |
| WO2016058907A1 (fr) | 2014-10-13 | 2016-04-21 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces |
| WO2016058879A1 (fr) | 2014-10-13 | 2016-04-21 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces et procédé permettant de faire fonctionner une machine de nettoyage de surfaces |
| WO2016058956A1 (fr) | 2014-10-13 | 2016-04-21 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces |
| WO2016058901A1 (fr) | 2014-10-13 | 2016-04-21 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces dotée d'un dispositif d'humidification |
| DE202015101302U1 (de) | 2015-03-13 | 2015-04-08 | Vorwerk & Co. Interholding Gmbh | Reinigungsgerät in Form eines Staubsaugers oder Vorsatzgerätes für einen Staubsauger |
| WO2017059600A1 (fr) | 2015-10-10 | 2017-04-13 | 深圳市赫兹科技有限公司 | Nettoyeur de sol |
| WO2017059602A1 (fr) | 2015-10-10 | 2017-04-13 | 深圳市赫兹科技有限公司 | Appareil de nettoyage de sol, et structure pour dégager un rouleau de nettoyage de ce dernier |
| WO2017059603A1 (fr) | 2015-10-10 | 2017-04-13 | 深圳市赫兹科技有限公司 | Dispositif de nettoyage de sol et sa structure de récipient d'eau |
| WO2017059601A1 (fr) | 2015-10-10 | 2017-04-13 | 深圳市赫兹科技有限公司 | Dispositif de nettoyage de sol, élément de rouleau de nettoyage, et rouleau en éponge |
| WO2017063663A1 (fr) | 2015-10-12 | 2017-04-20 | Alfred Kärcher Gmbh & Co. Kg | Machine de nettoyage de surfaces |
| CN205181250U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器 |
| CN205181256U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器及其清洁筒清理结构 |
| CN205181251U (zh) | 2015-10-12 | 2016-04-27 | 深圳市赫兹科技有限公司 | 地面清洁器、清洁筒组件及海绵筒 |
| DE202016105299U1 (de) | 2015-10-12 | 2016-10-19 | Hizero Technologies Co., Ltd. | Bodenreinigungsvorrichtung und Abfluss derselben |
| US20170119225A1 (en) | 2015-10-28 | 2017-05-04 | Bissell Homecare, Inc. | Surface cleaning apparatus |
| CN205359367U (zh) | 2016-01-13 | 2016-07-06 | 南京信息工程大学 | 一种小型手持式楼道清扫机 |
| US9622637B1 (en) | 2016-03-18 | 2017-04-18 | Protrend Co., Ltd. | Combined mop |
| DE202016105300U1 (de) | 2016-09-23 | 2016-10-21 | Hizero Technologies Co., Ltd. | Bodenreinigungsvorrichtung, Reinigungstrommelanordnung und Schwammtrommel |
| DE202016105301U1 (de) | 2016-09-23 | 2016-10-19 | Hizero Technologies Co., Ltd. | Bodenreinigungsvorrichtung |
| CN206687671U (zh) | 2016-11-10 | 2017-12-01 | 唐飞宇 | 一种新型便携式地面污物清理装置 |
| AU2017101723A4 (en) | 2016-12-16 | 2018-01-18 | Bissell Inc. | Surface cleaning apparatus |
| CN107007215A (zh) | 2017-06-02 | 2017-08-04 | 深圳市得城网络科技有限公司 | 具有旋转式人体感应器的自动扫地机器人 |
| DE102017120723A1 (de) | 2017-09-08 | 2019-03-14 | Alfred Kärcher SE & Co. KG | Reinigungsmaschinen-Station für eine Reinigungsmaschine, Reinigungsmaschine und Kombination aus Reinigungsmaschinen-Station und Reinigungsmaschine |
| DE202018104772U1 (de) | 2018-08-20 | 2018-09-07 | Hizero Technologies Co., Ltd. | Schmutzwassersammel- und -detektionsmechanismus und Reinigungsvorrichtung |
| WO2021013343A1 (fr) | 2019-07-24 | 2021-01-28 | Alfred Kärcher SE & Co. KG | Machine de nettoyage de sols |
| WO2021043425A1 (fr) * | 2019-09-06 | 2021-03-11 | Alfred Kärcher SE & Co. KG | Machine de nettoyage du sol et procédé permettant de faire fonctionner une machine de nettoyage du sol |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4201284B1 (fr) | 2024-07-17 |
| DE102021134577A1 (de) | 2023-06-29 |
| CN116369793A (zh) | 2023-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3206551B1 (fr) | Machine de nettoyage de surfaces | |
| EP3206548B1 (fr) | Machine de nettoyage de surfaces et procédé permettant de faire fonctionner une machine de nettoyage de surfaces | |
| EP3426123A1 (fr) | Machine de nettoyage de surfaces | |
| EP4003118B1 (fr) | Machine de nettoyage de sols | |
| WO2017152973A1 (fr) | Machine de nettoyage de surfaces | |
| WO2023152082A1 (fr) | Dispositif de nettoyage de plancher avec cassette | |
| WO2018059713A1 (fr) | Engin de balayage motorisé et actionné à la main | |
| WO2013064182A1 (fr) | Machine de nettoyage des sols guidée à la main | |
| WO2023151998A1 (fr) | Dispositif de nettoyage de plancher avec élément d'essuyage mobile | |
| EP4025110A1 (fr) | Nettoyeur du sol avec ramassage des cheveux et procédé de fonctionnement d'un nettoyeur de sol | |
| DE102022102937A1 (de) | Bodenreinigungsgerät mit Schmutzfluid-Tank | |
| EP3547889B1 (fr) | Appareil de nettoyage et procédé de fonctionnement d'un appareil de nettoyage | |
| DE202022101313U1 (de) | Bodenreinigungsgerät mit beweglichem Abstreifelement | |
| DE202022101312U1 (de) | Bodenreinigungsgerät mit Kassette | |
| EP4025105B1 (fr) | Machine de nettoyage de sol et méthode pour l'opération d'une machine de nettoyage de sol | |
| EP2773253A1 (fr) | Machine de nettoyage des sols guidée à la main | |
| EP4201284B1 (fr) | Machine de nettoyage de sol dotée d'une languette de préhension et procédé de retrait d'un dispositif de réservoir de fluide sale à partir d'une tête de nettoyage | |
| EP4201285A1 (fr) | Machine de nettoyage de sol dotée d'une articulation pivotante et procédé de fonctionnement d'une machine de nettoyage de sol | |
| EP4201283A1 (fr) | Machine de nettoyage du sol dotée d'au moins un élément de support | |
| WO2023117346A1 (fr) | Machine de nettoyage de surface dotée d'un élément racleur incurvé | |
| DE202022101314U1 (de) | Bodenreinigungsgerät mit Schmutzfluid-Tank | |
| WO2024126142A1 (fr) | Dispositif de nettoyage de sol avec tête de sol à paroi | |
| WO2024126122A1 (fr) | Appareil de nettoyage de sol équipé d'un réservoir à fluide sale comportant deux zones | |
| WO2023151833A1 (fr) | Dispositif de nettoyage de plancher avec dispositif de balayage et procédé de fonctionnement d'un dispositif de nettoyage de plancher |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20231227 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20240220 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC ME MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502022001254 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |