EP3798367A1 - Élément d'ancrage sur une tranchée, son procédé de fonctionnement et procédé de construction souterraine - Google Patents
Élément d'ancrage sur une tranchée, son procédé de fonctionnement et procédé de construction souterraine Download PDFInfo
- Publication number
- EP3798367A1 EP3798367A1 EP19199492.0A EP19199492A EP3798367A1 EP 3798367 A1 EP3798367 A1 EP 3798367A1 EP 19199492 A EP19199492 A EP 19199492A EP 3798367 A1 EP3798367 A1 EP 3798367A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- grab
- gripper
- guide frame
- blades
- wall grab
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 12
- 238000012407 engineering method Methods 0.000 title claims description 7
- 239000000463 material Substances 0.000 claims abstract description 19
- 239000002689 soil Substances 0.000 claims abstract description 19
- 238000010276 construction Methods 0.000 claims description 7
- 239000000725 suspension Substances 0.000 claims description 2
- 238000005516 engineering process Methods 0.000 claims 1
- 230000004323 axial length Effects 0.000 description 4
- 230000018109 developmental process Effects 0.000 description 4
- 238000009412 basement excavation Methods 0.000 description 3
- 238000006073 displacement reaction Methods 0.000 description 2
- 229910000831 Steel Inorganic materials 0.000 description 1
- 150000001875 compounds Chemical class 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 229910052500 inorganic mineral Inorganic materials 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000011707 mineral Substances 0.000 description 1
- 238000005065 mining Methods 0.000 description 1
- 239000002994 raw material Substances 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 238000007789 sealing Methods 0.000 description 1
- 239000010959 steel Substances 0.000 description 1
Images


Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02D—FOUNDATIONS; EXCAVATIONS; EMBANKMENTS; UNDERGROUND OR UNDERWATER STRUCTURES
- E02D17/00—Excavations; Bordering of excavations; Making embankments
- E02D17/13—Foundation slots or slits; Implements for making these slots or slits
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F5/00—Dredgers or soil-shifting machines for special purposes
- E02F5/02—Dredgers or soil-shifting machines for special purposes for digging trenches or ditches
- E02F5/025—Dredgers or soil-shifting machines for special purposes for digging trenches or ditches with scraper-buckets, dippers or shovels
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/46—Dredgers; Soil-shifting machines mechanically-driven with reciprocating digging or scraping elements moved by cables or hoisting ropes ; Drives or control devices therefor
- E02F3/47—Dredgers; Soil-shifting machines mechanically-driven with reciprocating digging or scraping elements moved by cables or hoisting ropes ; Drives or control devices therefor with grab buckets
- E02F3/475—Dredgers; Soil-shifting machines mechanically-driven with reciprocating digging or scraping elements moved by cables or hoisting ropes ; Drives or control devices therefor with grab buckets for making foundation slots
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/46—Dredgers; Soil-shifting machines mechanically-driven with reciprocating digging or scraping elements moved by cables or hoisting ropes ; Drives or control devices therefor
- E02F3/58—Component parts
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/46—Dredgers; Soil-shifting machines mechanically-driven with reciprocating digging or scraping elements moved by cables or hoisting ropes ; Drives or control devices therefor
- E02F3/58—Component parts
- E02F3/60—Buckets, scrapers, or other digging elements
Definitions
- the invention relates to a trench wall grab with a scaffold-like guide frame, a connecting device for hanging the trench wall grab on an upper end area of the guide frame and two grab shovels which are arranged at a lower end area of the guide frame and each around an inner shovel pivot bearing between an open receiving position for picking up soil material and are pivotable in a closed position, in which the gripper blades rest against one another for grasping the picked soil material, according to the preamble of claim 1.
- the invention also relates to a method for operating a trench wall grab with a scaffold-like guide frame, a connecting device for hanging the trench wall grab on an upper end area of the guide frame and two gripper blades which are arranged on a lower end area of the guide frame and each around a blade pivot bearing between an open receiving position are pivotable for picking up soil material and a closed position in which the gripper shovels rest against one another for gripping the picked up soil material, the diaphragm wall gripper with open gripper shovels being lowered into a floor, and the gripper shovels being closed while picking up soil material and the diaphragm wall gripper is raised upwards , according to the preamble of claim 12.
- the invention also relates to a civil engineering method according to claim 13.
- a diaphragm wall grab of the generic type is based on, for example EP 1 950 353 A1 emerged.
- the grab blades are pivotably mounted on a lower bearing area of the guide frame.
- diagonally extending link levers are provided, which are linked on the one hand to the grab blades and on the other hand to an actuating slide.
- the actuating slide is mounted on the guide frame so that it can be moved vertically and can be moved between a lower position and an upper position by means of a hydraulic cylinder. In the lower position of the actuating slide, the gripper blades are pivoted downward about the pivot bearing and closed, while in the upper position of the actuating slide the gripper blades are pulled up and pivoted open about the pivot bearing.
- an axial length of the trench wall grab when the grab blades are closed is greater than an axial length of the trench wall grab when the grab blades are open.
- the cross section of the guide frame is adapted to the cross section of the slot so that the trench wall gripper can guide itself through the guide frame with its contact surfaces in the slot.
- the guide frame In order to ensure the best possible guidance of the diaphragm wall grab in the created slot, the guide frame must have a certain height, which can be up to 10 m and more. This can limit the use of a diaphragm wall grab, as there must be enough free space above the ground.
- the free space above a floor can be limited so that only diaphragm wall grabs with a correspondingly short vertical length can be used.
- this is only possible to a certain extent, since otherwise an adequate guiding function of the box-like guiding frame is impaired.
- a diaphragm wall grab which has a reduced working height.
- an outer part of the scaffold-like guide frame is designed to be foldable, the guide frame being able to be folded away to the side to reduce the overall height when the diaphragm wall gripper is lifted out of the slot.
- the operation of the gripper blades which are articulated to a fixed position of the guide frame with their inner articulation points, that is to say the closing edge, also takes place via linkage rods attached laterally, that is to say further outward, to the gripper blades. These are connected to an actuating slide that is moved by an actuating cable. The gripper blades are pressed down to close and pulled up to open.
- a folding mechanism for the guide frame is fundamentally complex and also impairs the stability of the scaffold-like guide frame, which should have the highest possible rigidity.
- the invention is based on the object of specifying a diaphragm wall grab, a method for operating such a diaphragm wall grab, and a civil engineering method which enable a diaphragm wall grab to operate reliably even at a limited working height.
- the object is achieved by a diaphragm wall grab with the features of claim 1, a method for operating the diaphragm wall grab according to claim 12 and a civil engineering method according to claim 13.
- Preferred embodiments of the invention are specified in the respective dependent claims.
- the trench wall grab according to the invention is characterized in that, for pivoting the grab blades, the inner blade pivot bearings are arranged on at least one bearing slide, which is slidably mounted with respect to the guide frame between a lower slide position and an upper slide position, and that the grab blades each have at least one outer articulation lever with the Lead frames are connected.
- a basic idea of the invention is to bring about the displacement movement for opening and closing the grab shovels by vertically adjusting the inner pivot bearings of the grab shovels.
- the inner pivot bearings are arranged on at least one bearing slide, which is mounted displaceably between an upper slide position and a lower slide position. This considerably simplifies the mechanics of the gripper, since only one adjustment movement has to be generated for the at least one slide.
- the guide frame can also be designed as a largely rigid frame in the shape of a box, with contact or guide surfaces being provided in particular for contact with the walls of the slot.
- the gripper blades can be closed by moving the bearing slide upwards and opened by pushing it downwards.
- the gripper blades are each connected to the guide frame via at least one articulation lever.
- the articulation levers cause the gripper blades to be pivoted about their pivot bearings into the desired closed position or the receiving position.
- the outer articulation point does not move on a circular path, but on a superposition of the circular path and vertical movement of the center of the circle ("inner pivot bearing").
- the lowest point of the grab bucket moves upwards during the closing process, so that the bucket height is smaller when closed than when it is open or during the closing process.
- a preferred embodiment of the invention consists in that an actuating device is provided for pivoting the gripper blades between the receiving position and the closed position.
- the actuating device can be any A linear drive or a suitable rotary drive which causes the gripper blades to pivot directly or via an actuating mechanism.
- the actuating device can have a pulling or actuating cable with which the gripper blades can be pivoted.
- the actuating device has at least one adjusting cylinder, in particular a hydraulic cylinder.
- a hydraulic cylinder With a hydraulic cylinder, high actuating forces can be applied in a limited installation space.
- a separate adjusting cylinder can be provided for each gripper shovel, which swivels them.
- a particularly efficient construction of the diaphragm wall gripper is achieved in that the at least one adjusting cylinder is arranged on the one hand on the gripper frame and on the other hand on the bearing slide.
- an adjusting cylinder in particular a hydraulic cylinder, is arranged on the bearing slide, the latter can serve as an actuating slide for pivoting the gripper blades.
- both a change in the vertical length of the trench wall gripper and a pivoting movement of the gripper blades can thus be brought about by moving the bearing slide.
- two adjusting cylinders are provided, which are arranged symmetrically to one another with respect to a longitudinal axis of the gripper frame.
- the adjusting cylinders can be arranged at an angle to a vertical center plane of the trench wall grab and in particular act directly on the one hand on the guide frame and on the other hand on the bearing slide or on the gripper blades.
- An efficient operating sequence in the diaphragm wall grab can be achieved according to an embodiment variant of the invention in that the grab blades are open in the receiving position when the bearing slide is moved into the lower slide position, and that the grab blades are closed in the closed position when the bearing slide is in the upper slide position is shifted.
- the diaphragm wall grab has a closed grab shovel shorter vertical length than when the grab shovels are open.
- a downward pivoting of the gripper blades can result in a reduction in the vertical length due to the arrangement of the pivot bearings and articulation bearings.
- the diaphragm wall gripper can have the smallest possible vertical length or height, particularly when exiting a slot above the floor, so that the diaphragm wall gripper can also be used in confined spaces with a limited working height.
- the bearing slide to which the gripper blades are articulated can be mounted in any desired manner.
- the bearing slide can be displaced on the guide frame along a linear guide which runs parallel to a central longitudinal axis of the guide frame.
- the at least one adjusting cylinder can be arranged centrally and parallel to the central longitudinal axis, so that actuation of the bearing slide with as little transverse force as possible is ensured.
- the articulation lever In order to avoid jamming, it is expedient here for the articulation lever to be attached in an articulated manner on the one hand to the guide frame and on the other hand to the grab shovel.
- the articulation lever itself can perform a certain pivoting movement with respect to the guide frame and also to the gripper blades.
- the articulated mounting can take place via slide bushings or roller bearings.
- the two gripper blades are each mounted on bearing slides that can be displaced separately from one another, as a result of which an asymmetrical gripper blade movement could be generated.
- a particularly efficient construction of the diaphragm wall gripper results from the fact that the shovel pivot bearings of the gripper shovels are arranged close to a central longitudinal axis on a common bearing slide.
- the bearing slide and the entire arrangement of the gripper blades are symmetrical to a central longitudinal plane of the trench wall gripper, which usually extends vertically.
- the aim of the invention is in particular that the vertical length of the trench wall grab with closed grab blades in the closed position is smaller than the vertical length Length of the diaphragm wall grab with open grab shovels is in the pick-up position.
- the invention also comprises a construction machine with a carrier device, the previously described diaphragm wall gripper according to the invention being mounted on the carrier device in a vertically adjustable manner.
- the carrier device can be a stationary guide or a movable carrier device, which has a crawler track, for example.
- the diaphragm wall grab can be mounted vertically adjustable in particular by means of a guide rope or a guide rod, for example on a crane boom or mast.
- the method for operating a diaphragm wall grab is characterized in that the vertical length of the diaphragm wall grab with closed grab blades when lifting is smaller than the vertical length of the diaphragm wall grab with open grab blades when lowering.
- the vertical length of the trench wall grab outside a slot can be reduced when the grab blades are closed. This is particularly important when the grab shovels with the picked up soil material are pulled out of the slot and moved to an unloading position.
- the gripper blades can be closed again after unloading and moved back into the slot in the closed and thus vertically compact form.
- a preferred operating sequence for actuating the diaphragm wall grab and digging out soil material has the following steps in particular:
- a closed gripper is brought into position over the slot to be made.
- a first guide trench for receiving at least the lower area of the trench wall grab can be made in the ground beforehand at the position.
- the gripper blades can then be opened to pick up the soil material, whereby the diaphragm wall gripper can occupy a greater vertical length.
- the diaphragm wall grab can be lowered with the grab shovels open until it comes into contact with the ground.
- the grab shovels of the diaphragm wall grab are closed by pulling the grab shovels upwards.
- the diaphragm wall grab can be lowered further.
- the grab shovels are closed while the grab shovels fill with soil material, the diaphragm wall grab can resume its shorter vertical length.
- the diaphragm wall grab is unloaded by opening the grab shovels.
- the grab shovels can then be closed again and swiveled back to the working position in order to carry out another excavation process.
- the invention further relates to a civil engineering method in which a slot is created in the ground by means of the previously described diaphragm wall gripper according to the invention.
- a large number of slots can be created next to one another, so that overall a slot that is longer in the horizontal direction is created.
- the excavation of material is carried out as described above.
- the slot is filled with a hardenable suspension to form a slot wall.
- a concrete mass can be introduced into the slot.
- reinforcement elements such as metal lattice cages or steel girders, can be inserted into the slot.
- the diaphragm wall can be designed as a surrounding wall for large construction pits, a sealing wall or as a supporting wall.
- a civil engineering method within the meaning of the invention also includes mining mineral resources by means of the diaphragm wall grab.
- Raw materials contained in the soil such as. B. ores or diamonds, filtered from the excavation and the slot filled with the spoil.
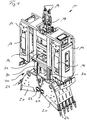
- An embodiment of a trench wall grab 10 according to the invention according to FIGS Figures 1 to 4 has a framework-like, box-shaped guide frame 12, on which plate-shaped guide surfaces 14 are arranged on the side regions.
- the guide surfaces 14 are used to independently guide the trench wall gripper 10 in the created slot with a rectangular cross-section, the guide surfaces 14 coming to rest on the side walls of the created slot in a generally known manner.
- Laterally extendable control plates 16 can also be arranged on the guide frame 12 in order to influence a position of the trench wall gripper 10 within the trench in a known manner and to control the course of the trench to be created to a certain extent.
- a connecting device 18 is arranged at an upper end region of the guide frame 12, with which the diaphragm wall gripper 10 is suspended, for example, on support ropes 19 on a carrier device (not shown). Energy supply and control can also take place via the connecting device 18, corresponding hydraulic lines, electrical lines and data lines not being shown in the figures.
- two spoon-like gripper blades 20 are arranged pivotably about an inner pivot bearing 22 in each case.
- removal teeth 24 are interchangeably arranged in a manner known in principle.
- the illustrated opening position of the grab shovels 20 is taken up over a rectangular slot cross-sectional area to form the slot.
- the pivot bearings 22 of the gripper blades 20 are not attached directly to the guide frame 12, but rather to a bearing slide 30 which is mounted on the guide frame 12 so as to be vertically displaceable along a linear guide 34.
- the box-shaped bearing slide 30 has corresponding linear guide strips 32 for this purpose.
- the linear guide 34 and the guide strips 32 extend parallel to a vertical longitudinal axis of the guide frame 12.
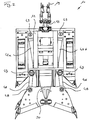
- two hydraulic adjusting cylinders 42a, 42b are provided in the illustrated diaphragm wall gripper 10 according to the invention, which are arranged in a V-arrangement on the diaphragm wall gripper 10 with respect to a central longitudinal plane of the guide frame 12, as illustrated in FIG Figures 2 and 4th is shown.
- the hydraulic actuating cylinders 42a, 42b are pivoted on the one hand with their cylinder housing on the upper region of the guide frame 12 on a first connecting bearing 43 and on the other hand with their piston rod on a second connecting bearing 44 on the bearing slide 30, such as from Fig. 4 emerges.
- a rotating device can be arranged in the free space between the adjusting cylinders 42a, 42b. With the rotating device, the gripper blades 20 can be rotated about the vertical axis by preferably 180 °.
- the bearing slide 30 with the gripper blades 20 articulated thereon can be moved into a lower end position, which is in the Figures 1 and 2 is shown.
- the pivot bearings 22 of the gripper shovels 20 are pressed down, the gripper shovels 20 being moved into an open position for receiving soil material.
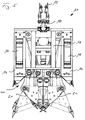
- the pivot bearings 22 of the gripper blades 20 are moved upwards into an upper end position, which is in the Figures 3 and 4th is shown.
- a linkage lever 46 is arranged on the side of each of the gripper blades 20.
- the two articulation levers 46 are each pivotable with the guide frame 12 via a first articulation bearing 47 and, on the other hand, pivotable with the respective gripper shovel via a second articulation bearing 48 20 connected.
- the bearing slide 30 moves upwards by the hydraulic actuating cylinders 42a, 42b, in the exemplary embodiment shown, the articulation lever 46 causes the gripper blades 20 to move from the open receiving position according to FIGS Figures 1 and 2 at the same time as the pivot bearing 22 is moved upwards into a closed position in which the gripper blades 20 are closed for picking up soil material, as illustrated in FIG Figures 3 and 4th is shown.
- the hydraulic actuating cylinders 42a, 42b and the articulation lever 46 together with the displaceable bearing slide 30 thus form an actuating device 40 by which the gripper blades 20 can be actuated for opening and closing.
- the construction according to the invention can achieve an axial length or height of the trench wall grab 10 in the closed position with closed grab blades 20 which is smaller than is a vertical length or height of the diaphragm wall grab 10 with the grab blades 20 open.
- the trench wall grab 10 thus has a minimum vertical length or height in the closed position in which it is usually pulled out of the slot, so that a particularly compact construction of the trench wall grab 10 is given.
Landscapes
- Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Mechanical Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Paleontology (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Shovels (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19199492.0A EP3798367B1 (fr) | 2019-09-25 | 2019-09-25 | Élément d'ancrage sur une tranchée, son procédé de fonctionnement et procédé de construction souterraine |
| CN202011024864.9A CN112554258B (zh) | 2019-09-25 | 2020-09-25 | 槽壁抓夹器、用于运行槽壁抓夹器的方法和地下工程方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP19199492.0A EP3798367B1 (fr) | 2019-09-25 | 2019-09-25 | Élément d'ancrage sur une tranchée, son procédé de fonctionnement et procédé de construction souterraine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3798367A1 true EP3798367A1 (fr) | 2021-03-31 |
| EP3798367B1 EP3798367B1 (fr) | 2022-03-09 |
Family
ID=68069508
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19199492.0A Active EP3798367B1 (fr) | 2019-09-25 | 2019-09-25 | Élément d'ancrage sur une tranchée, son procédé de fonctionnement et procédé de construction souterraine |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3798367B1 (fr) |
| CN (1) | CN112554258B (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4134490A1 (fr) | 2021-08-12 | 2023-02-15 | BAUER Maschinen GmbH | Dispositif préhenseur et procédé de fonctionnement d'un dispositif préhenseur |
| EP4134489A1 (fr) | 2021-08-12 | 2023-02-15 | BAUER Maschinen GmbH | Dispositif préhenseur et procédé de fonctionnement d'un dispositif préhenseur |
| EP4296431A1 (fr) * | 2022-06-24 | 2023-12-27 | BAUER Spezialtiefbau GmbH | Procédé de pose et de construction d'une paroi d'appui dans le sol et paroi d'appui |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB799519A (en) * | 1956-03-07 | 1958-08-13 | Priestman Brothers | Improvements relating to grabs |
| DE2161401A1 (de) | 1970-12-10 | 1972-06-29 | Sperry Rand Corp | Steuerungs- und Regelvorrichtung für Luftfahrzeuge |
| GB2126981A (en) * | 1982-09-13 | 1984-04-04 | Frankignoul Pieux Armes | Improvements in or relating to grab bucket apparatus |
| DE3805868A1 (de) * | 1988-02-25 | 1989-09-07 | Hochtief Ag Hoch Tiefbauten | Seilgefuehrter schlitzwandgreifer |
| EP1950353A1 (fr) | 2007-01-26 | 2008-07-30 | BAUER Maschinen GmbH | Dispositif d'excavation du sol |
| EP2848740A1 (fr) | 2013-09-17 | 2015-03-18 | Soilmec S.p.A. | Dispositif de creusage de diaphragmes |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR1291709A (fr) * | 1961-03-16 | 1962-04-27 | Benoto Sa | Benne électrique à commande hydraulique |
| FR2040945A5 (fr) * | 1969-04-28 | 1971-01-22 | Allard Pierre | |
| US3684040A (en) * | 1970-06-24 | 1972-08-15 | P & Z Co Inc | Apparatus for actuating clam shell bucket |
| DE3810459A1 (de) * | 1988-03-26 | 1989-10-12 | Hochtief Ag Hoch Tiefbauten | Seilgefuehrter schlitzwandgreifer |
| CN101736764B (zh) * | 2008-11-25 | 2012-05-23 | 上海金泰工程机械有限公司 | 一种冲击式挖掘装置 |
| CN105951910A (zh) * | 2016-05-09 | 2016-09-21 | 同济大学 | 带有回转系统的双瓣液压抓斗 |
| EP3401444B1 (fr) * | 2017-05-11 | 2019-11-27 | BAUER Maschinen GmbH | Dispositif d'excavation de tranchée et procédé de fabrication de tranchées dans le sol |
-
2019
- 2019-09-25 EP EP19199492.0A patent/EP3798367B1/fr active Active
-
2020
- 2020-09-25 CN CN202011024864.9A patent/CN112554258B/zh active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB799519A (en) * | 1956-03-07 | 1958-08-13 | Priestman Brothers | Improvements relating to grabs |
| DE2161401A1 (de) | 1970-12-10 | 1972-06-29 | Sperry Rand Corp | Steuerungs- und Regelvorrichtung für Luftfahrzeuge |
| GB2126981A (en) * | 1982-09-13 | 1984-04-04 | Frankignoul Pieux Armes | Improvements in or relating to grab bucket apparatus |
| DE3805868A1 (de) * | 1988-02-25 | 1989-09-07 | Hochtief Ag Hoch Tiefbauten | Seilgefuehrter schlitzwandgreifer |
| EP1950353A1 (fr) | 2007-01-26 | 2008-07-30 | BAUER Maschinen GmbH | Dispositif d'excavation du sol |
| EP2848740A1 (fr) | 2013-09-17 | 2015-03-18 | Soilmec S.p.A. | Dispositif de creusage de diaphragmes |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4134490A1 (fr) | 2021-08-12 | 2023-02-15 | BAUER Maschinen GmbH | Dispositif préhenseur et procédé de fonctionnement d'un dispositif préhenseur |
| EP4134489A1 (fr) | 2021-08-12 | 2023-02-15 | BAUER Maschinen GmbH | Dispositif préhenseur et procédé de fonctionnement d'un dispositif préhenseur |
| WO2023016883A1 (fr) | 2021-08-12 | 2023-02-16 | Bauer Maschinen Gmbh | Appareil de préhension et procédé de fonctionnement d'un appareil de préhension |
| WO2023016914A1 (fr) | 2021-08-12 | 2023-02-16 | Bauer Maschinen Gmbh | Appareil de préhension et son procédé de fonctionnement |
| EP4249687A2 (fr) | 2021-08-12 | 2023-09-27 | BAUER Maschinen GmbH | Dispositif de préhension et procédé de fonctionnement d'un dispositif de préhension |
| EP4296431A1 (fr) * | 2022-06-24 | 2023-12-27 | BAUER Spezialtiefbau GmbH | Procédé de pose et de construction d'une paroi d'appui dans le sol et paroi d'appui |
| WO2023247094A1 (fr) * | 2022-06-24 | 2023-12-28 | Bauer Spezialtiefbau Gmbh | Procédé de conception et de formation d'un mur de soutènement dans le sol et mur de soutènement |
Also Published As
| Publication number | Publication date |
|---|---|
| CN112554258A (zh) | 2021-03-26 |
| EP3798367B1 (fr) | 2022-03-09 |
| CN112554258B (zh) | 2022-11-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3798367B1 (fr) | Élément d'ancrage sur une tranchée, son procédé de fonctionnement et procédé de construction souterraine | |
| DE69203917T2 (de) | Werkzeugwechselvorrichtung einer Erdbaumaschine. | |
| DE2542305B2 (de) | Bodenaushubgerät | |
| DE3615068C1 (en) | Rope-guided trench-wall grab | |
| EP3725950B1 (fr) | Benne de forage et procédé de fabrication d'une parois dans le sol | |
| DE2947161A1 (de) | Gestaenge als arm fuer einen bagger | |
| DE19512070A1 (de) | Bohrgerät | |
| DE1634943A1 (de) | Hydraulischer Universalbagger | |
| EP2698474B1 (fr) | Dispositif de pose de pavés avec un dispositif de support de mâchoires de préhension | |
| DE1634733C3 (de) | Hochlöffelbagger | |
| EP2889431B1 (fr) | Machine de travail pour le fonctionnement de benne racleuse | |
| EP3725951B1 (fr) | Dispositif de benne et procédé de fabrication d'une fouille de fondation | |
| DE2405142B1 (de) | Bohrgreifer fuer Pfahlgruendungen und Brunnenbohrungen | |
| EP2789749A2 (fr) | Dispositif destiné à l'augmentation du rayon d'action d'une machine d'excavation et son utilisation | |
| DE2929463C2 (de) | Hydraulisch betätigter Bagger | |
| EP0960851A2 (fr) | Dispositif de déplacement de tuyaux | |
| DE2840181A1 (de) | Fuehrungs- und positioniermechanismus fuer das arbeitswerkzeug von stichlochbohr- oder stichlochstopfmaschinen an schachtoefen | |
| DE263748C (fr) | ||
| DE3202464C2 (de) | Ankerpfahlbetätigung | |
| DE19711649A1 (de) | Verdichtungsvorrichtung | |
| WO2012045444A1 (fr) | Machine de travail à fonction de burinage | |
| DE29611200U1 (de) | Kranvorrichtung | |
| DE3102166C2 (de) | Vorrichtung zum Erzielen einer an die Dachneigung eines Gebäudes angepaßten Bahnkurve eines an einem Tragrahmen gelagerten Wippauslegers | |
| DE69303450T2 (de) | Teleskopische Führungvorrichtung für ein Baggergerät zum Graben von Tiefgräben mit Frästrommeln | |
| EP2801668A1 (fr) | Dispositif de creusement pour la réalisation d'une fente dans le sol |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20200311 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20211022 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: AT Ref legal event code: REF Ref document number: 1474266 Country of ref document: AT Kind code of ref document: T Effective date: 20220315 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502019003636 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20220309 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220609 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220609 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220610 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220711 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220709 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502019003636 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 |
|
| 26N | No opposition filed |
Effective date: 20221212 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20220930 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230524 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220930 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220925 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20190925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230925 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220309 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240913 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240926 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20240916 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20240904 Year of fee payment: 6 |