EP3694802B1 - Greifvorrichtung für schalen - Google Patents
Greifvorrichtung für schalen Download PDFInfo
- Publication number
- EP3694802B1 EP3694802B1 EP18789329.2A EP18789329A EP3694802B1 EP 3694802 B1 EP3694802 B1 EP 3694802B1 EP 18789329 A EP18789329 A EP 18789329A EP 3694802 B1 EP3694802 B1 EP 3694802B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- shell
- jaws
- jaw
- locking means
- intended
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 241000497429 Obus Species 0.000 description 5
- 239000000872 buffer Substances 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 230000000284 resting effect Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C1/00—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles
- B66C1/10—Load-engaging elements or devices attached to lifting or lowering gear of cranes or adapted for connection therewith for transmitting lifting forces to articles or groups of articles by mechanical means
- B66C1/42—Gripping members engaging only the external or internal surfaces of the articles
- B66C1/422—Gripping members engaging only the external or internal surfaces of the articles actuated by lifting force
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F41—WEAPONS
- F41A—FUNCTIONAL FEATURES OR DETAILS COMMON TO BOTH SMALLARMS AND ORDNANCE, e.g. CANNONS; MOUNTINGS FOR SMALLARMS OR ORDNANCE
- F41A9/00—Feeding or loading of ammunition; Magazines; Guiding means for the extracting of cartridges
- F41A9/87—Ammunition handling dollies or transfer carts
Definitions
- the technical field of the invention is that of gripping devices for shells and in particular for large caliber shells.
- a shell clamp comprising a pair of jaws intended to grip a shell, each jaw pivoting between an open position and a closed position about a pivot axis parallel to the longitudinal axis of the shell, the pivot axis of each jaw being located between a lower end and an upper end of the jaw, the upper end of each jaw allowing the jaw to be closed by resting this upper end on a shell to be grasped.
- each jaw comprises a notch intended to interfere with a lug of a cam to hold the jaws in the closed position.
- the closed position of the jaws is therefore directly linked to the relative geometries of the cam and of the jaw.
- the cam is integral with a pivoting pallet, the pivoting of which, which is caused by pressing on a zone close to a stretcher, makes it possible to rotate the cam and thus release the lug from the rotating path of the notch of the jaw which has the effect of freeing the jaw opening.
- the gripping of a shell is done at its base on the one hand and at its warhead on the other hand.
- the geometries of the jaws and of their cam are therefore defined as a function of the dimensions of these parts of the shell.
- the invention provides a unique device for handling shells of varying lengths and ensures a more secure grip of the shell being transported.
- the invention relates to a gripping device for a shell, comprising at least one pair of jaws intended to grip a shell, each jaw pivoting between an open position and a closed position about a pivot axis parallel to the longitudinal axis of the shell, the pivot axis of each jaw being integral with a frame and located between a lower end and an upper end of the jaw, the application of the upper end of each jaw on the shell causing the closure of the jaws, device characterized in that it comprises a locking means connecting the upper ends of the jaws and comprising two connecting rods and a central segment connecting these connecting rods, connecting rods articulated with respect to the jaws by a first articulation and articulated by a second articulation to the central segment, an elastic return means connecting each first articulation at a so-called central point disposed in the middle of the central segment , device comprising at least one movable stop integral with an operating lever, stop located above the locking means and capable of pushing the locking means downwards to below an unstable equilibrium position of the locking means.
- the device comprises at least two pairs of coaxial jaws.
- the device comprises two stops each comprising a lever, each stop being intended to press on one of the connecting rods of the locking means.
- the frame comprises a sliding support intended to interfere with an upper part of the shell in order to wedge the shell in the device.
- the device comprises at least one wedge in its rear part which is intended to bear on a rear face of the base of the shell in order to position the latter longitudinally relative to the device.
- each lever may be integral with two stops, each stop being intended to act on a connecting rod associated with a different pair of jaws.
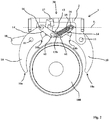
- a shell gripping device 1 intended to be hung at the end of a manipulator arm (arm not shown) comprises a frame 2 which comprises two pairs of jaws 10. Each pair of jaws 10 is intended to grip a shell 100 at the level of a cylindrical portion of its body. Each jaw 10 is pivotally mounted between an open position and a closed position by virtue of a pivot pin 11 located between a lower end 10a and an upper end of the jaw 10.
- the upper ends 10b of the jaws 10 are interconnected in pairs by a locking means 30.
- This locking means 30, detailed in figures 5a, 5b, 5c comprises a central segment 13, each of the ends of which carries a connecting rod 14 which is connected to an upper end 10b of a jaw 10.
- the connecting rods 14 are articulated with respect to the jaws 10 at the levels of first articulations 16 and with respect to the central segment 13 at the level of second articulations 61.
- Elastic return means 15, in this case tension springs 15, connect the first articulations 16 to a point called the central point 13b of the central segment 13.
- This central point 13b is located longitudinally in the middle of the central segment 13, below a horizontal line L passing through each of the joints 16 and 61 when the connecting rods 14 are aligned according to the figure 5c .
- the device 1 is lowered onto the shell 100 with the jaws 10 in the open position.
- the upper end 10b of each jaw 10 is placed to rest on the shell 100.
- the locking means 30 is in the configuration shown in figure 5a .
- the springs 15 exert a force which tends to bring the first articulations 16 closer to the central point 13b and therefore to move the second articulation 61 downwards, which opens the jaws 10 and maintains them in this open position.
- the support and the descent of the device 1 on the shell 100 causes the jaws 10 to pivot about their axes 11 towards the closed position and the clamping of the shell 100.
- the upper ends 10b of the jaws 10 deviate from each other.
- the locking device 30 passes through an unstable equilibrium position illustrated in figure 5b where the first 16 and the second 61 articulations of each connecting rod 14 align with the center point 13b.
- Each straight line connecting a first articulation 16 and a second articulation 61 is parallel to the tensile force of the spring 15 considered, which constitutes an unstable position for the locking means 30. In this position, the tensile force supplied by each spring. is at its maximum.
- the connecting rods 14 will gradually turn until they are aligned ( figure 5c ).
- the central point 13b of the central segment 13 is located below a horizontal line L passing through each of the joints 16 and 61, this makes it possible to force the crossing of the unstable equilibrium position by the second articulations 61.
- the jaws 10 are then in their most closed position. Once past the unstable equilibrium position of the figure 5b , the springs 15 have the effect of bringing the connecting rods 14 closer to the position 5c which corresponds to the maximum closing of the jaws 10.
- a stop 17 placed above the locking means 30 blocks the ascent of the second articulations 61 by interfering with the connecting rods 14 or the central segment 13.
- the shell 100 is then blocked by the jaws 10 as visible at the figure 3c .
- the device 1 is brought over a stretcher 200 according to the figure 4a .
- the stretcher is analogous to that described by the patent FR3041622 and has on either side of support elements 19 called buffers 19 which are intended to interfere with the levers 18 of the device 1, pivoting relative to the frame 2 around axes 20 and integral with the stops 17 (see also the figures 1 and 2 ).
- the jaws 10 are then locked in the open position by the simple pulling action of the springs 15.
- the device 1 is ready to go and grab a new shell.
- the device according to the invention can be adapted to hold shells having substantially different dimensions, the locking position being obtainable for pivoting of the different jaws.
- the main thing is to make the locking means 30 pass beyond its unstable equilibrium position.
- the springs 15 ensure the locking of the jaws.
- the stiffness of the springs 15 will be chosen sufficient to prevent, during vibrations, any return of the locking means 30 to the shell release position ( figure 3a ).
- the device 1 may include a sliding support 60 capable of being pushed back by a spring 67 through the frame 2 and against the upper part of a shell in order to wedge it when it is clamped in the device 1 by application of a force vertical, to fight against accelerations on all axes.
- the frame 2 comprises a pair of wedges 32 intended to come to bear on a rear face of the base 105 of the shell 100 in order to position the shell 100 longitudinally relative to the device 1.
- the frame 2 also comprises on each side clamping elements 33 (only one is visible at the figure 1 ) intended to limit the pivoting of the levers 18 and therefore the downward stroke of the associated stops 17.
- each lever 18 is integral with two stops 17 each intended to act on a locking means associated with a different pair of jaws.
- the levers 18 are located longitudinally halfway between the pairs of jaws 10 ( figure 1 ).
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Load-Engaging Elements For Cranes (AREA)
- Manipulator (AREA)
- Accommodation For Nursing Or Treatment Tables (AREA)
- Clamps And Clips (AREA)
Claims (6)
- - Greifvorrichtung (1) für Granaten (100), mit mindestens einem Paar von Backen (10), die zum Greifen einer Granate (100) bestimmt sind, wobei jede Backe (10) zwischen einer offenen Stellung und einer geschlossenen Stellung um eine zur Längsachse der Granate (100) parallele Schwenkachse (11) schwenkbar ist, wobei die Schwenkachse (11) jeder Backe (10) fest verbunden mit einem Rahmen ist und zwischen einem unteren Ende (10a) und einem oberen Ende (10b) der Backe (10) angeordnet ist, wobei das Anlegen des oberen Endes jeder Backe (10) an die Granate (100) das Schließen der Backen (10) bewirkt, wobei die Vorrichtung dadurch gekennzeichnet ist, dass sie ein Verriegelungsmittel (30) umfasst, das die oberen Enden (10b) der Backen (10) verbindet und zwei Verbindungsstangen (14) und ein zentrales Segment (13) umfasst, das diese Verbindungsstangen (14) verbindet, wobei die Verbindungsstangen in Bezug auf die Backen (10) durch ein erstes Gelenk (16) angelenkt sind und durch ein zweites Gelenk (61) an dem zentralen Segment (13) angelenkt sind, wobei ein elastisches Rückstellmittel (15) jedes erste Gelenk (16) an einem sogenannten zentralen Punkt (13b) verbindet, der in der Mitte des zentralen Segments (13) angeordnet ist, wobei die Vorrichtung mindestens einen beweglichen Anschlag (17) umfasst, der mit einem Betätigungshebel (18) fest verbunden ist, wobei der Anschlag sich oberhalb des Verriegelungsmittels (30) befindet und in der Lage ist, das Verriegelungsmittel (30) nach unten zu drücken, bis es sich unterhalb einer instabilen Gleichgewichtsposition des Verriegelungsmittels (30) befindet.
- - Greifvorrichtung nach Anspruch 1, dadurch gekennzeichnet, dass sie mindestens zwei Paare von koaxialen Backen umfasst.
- - Vorrichtung nach einem der Ansprüche 1 und 2, dadurch gekennzeichnet, dass sie zwei Anschläge (17) umfasst, die jeweils einen Hebel (18) aufweisen, wobei jeder Anschlag (17) dazu bestimmt ist, auf eine der Verbindungsstangen (14) des Verriegelungsmittels zu drücken.
- - Vorrichtung nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet, dass der Rahmen (2) eine gleitende Stütze (60) umfasst, die dazu bestimmt ist, in einen oberen Teil der Granate (100) einzugreifen, um die Granate in der Vorrichtung zu verkeilen.
- - Vorrichtung nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, dass sie in ihrem hinteren Teil mindestens einen Keil (32) aufweist, der dazu bestimmt ist, sich auf einer hinteren Fläche des Granatenbodens abzustützen, um diesen in Bezug auf die Vorrichtung in Längsrichtung zu positionieren.
- - Vorrichtung nach Anspruch 3, dadurch gekennzeichnet, dass jeder Hebel (18) mit zwei Anschlägen (17) fest verbunden ist, wobei jeder Anschlag (17) dazu bestimmt ist, auf eine Verbindungsstange (14) zu wirken, die einem anderen Paar von Backen zugeordnet ist.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PL18789329T PL3694802T3 (pl) | 2017-10-12 | 2018-09-28 | Urządzenie chwytające do pocisków |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1701067A FR3072372B1 (fr) | 2017-10-12 | 2017-10-12 | Dispositif de prehension pour obus |
| PCT/EP2018/076540 WO2019072600A1 (fr) | 2017-10-12 | 2018-09-28 | Dispositif de préhension pour obus |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3694802A1 EP3694802A1 (de) | 2020-08-19 |
| EP3694802B1 true EP3694802B1 (de) | 2021-12-01 |
Family
ID=61187348
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18789329.2A Active EP3694802B1 (de) | 2017-10-12 | 2018-09-28 | Greifvorrichtung für schalen |
Country Status (12)
| Country | Link |
|---|---|
| US (1) | US11312597B2 (de) |
| EP (1) | EP3694802B1 (de) |
| KR (1) | KR102503104B1 (de) |
| BR (1) | BR112020006552A2 (de) |
| DK (1) | DK3694802T3 (de) |
| ES (1) | ES2905630T3 (de) |
| FR (1) | FR3072372B1 (de) |
| IL (1) | IL273870B1 (de) |
| PL (1) | PL3694802T3 (de) |
| SG (1) | SG11202003289QA (de) |
| WO (1) | WO2019072600A1 (de) |
| ZA (1) | ZA202001500B (de) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA3148984A1 (en) * | 2019-08-02 | 2021-02-11 | LiftWerx Holdings Inc. | Clamp for wind turbine rotor blade |
| CN112875492B (zh) * | 2021-01-25 | 2022-05-27 | 青岛中科坤泰装配建筑科技有限公司 | 一种装配式预制综合管廊吊点结构 |
| DE102021117949A1 (de) | 2021-07-12 | 2023-01-12 | Rheinmetall Air Defence Ag | Zuführungsvorrichtung, insbesondere Munitionszuführung einer Kanone, mit mehreren Behältern zur Aufnahme jeweils eines Objektes, insbesondere eines militärischen Wirkkörpers |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1396328A (en) * | 1920-04-12 | 1921-11-08 | Charles G Hall | Radiator-carrier |
| US2365930A (en) * | 1943-03-31 | 1944-12-26 | Goodrich Co B F | Apparatus for handling shells and similar objects |
| US2610890A (en) * | 1950-06-02 | 1952-09-16 | Jaeger Machine Co | Lifting device |
| US5163727A (en) * | 1988-05-12 | 1992-11-17 | Rjs Corporation | Creel loading apparatus |
| FR2663873A1 (fr) * | 1990-06-29 | 1992-01-03 | Framatome Sa | Dispositif de manutention automatique de plusieurs elements de positionnement et/ou de liaison. |
| JPH086151Y2 (ja) * | 1991-10-31 | 1996-02-21 | 川崎重工業株式会社 | クランプ装置 |
| JPH0728181U (ja) * | 1993-03-18 | 1995-05-23 | 株式会社小松製作所 | 円筒形物体の把持機構 |
| US5486030A (en) * | 1994-05-04 | 1996-01-23 | Abc Packaging Machine Corporation | Apparatus and method for lifting and depositing bottles having handles |
| FR2720226B1 (fr) * | 1994-05-26 | 1996-09-27 | Lopez Laurent Guy | Instrument du type fusil pour la neutralisation d'un poisson ferré. |
| FR2769302B1 (fr) * | 1997-10-03 | 1999-10-29 | Renault | Pince a leviers |
| US6012752A (en) * | 1999-02-24 | 2000-01-11 | Douglas; William E. | Concrete pipe lifting apparatus |
| KR200196267Y1 (ko) * | 2000-04-20 | 2000-09-15 | 모춘기 | 플륨관 이동용 클램프 |
| JP2007001671A (ja) * | 2005-06-21 | 2007-01-11 | Nippon Clamp Kk | 縦吊り用クランプ |
| US8973960B2 (en) * | 2011-02-11 | 2015-03-10 | Kenda Wehrly | Rock grasping and removal apparatus |
| KR20130004516U (ko) * | 2012-01-12 | 2013-07-22 | 국방과학연구소 | 탄두 이송 장치 |
| FR3020672B1 (fr) * | 2014-04-30 | 2016-05-06 | Nexter Systems | Dispositif de prehension d'obus et procede de prehension mettant en oeuvre un tel dispositif |
| FR3041622B1 (fr) * | 2015-09-29 | 2019-06-21 | Nexter Systems | Dispositif de prehension pour obus et civiere associee |
-
2017
- 2017-10-12 FR FR1701067A patent/FR3072372B1/fr active Active
-
2018
- 2018-09-28 ES ES18789329T patent/ES2905630T3/es active Active
- 2018-09-28 EP EP18789329.2A patent/EP3694802B1/de active Active
- 2018-09-28 KR KR1020207013558A patent/KR102503104B1/ko active IP Right Grant
- 2018-09-28 BR BR112020006552-8A patent/BR112020006552A2/pt unknown
- 2018-09-28 DK DK18789329.2T patent/DK3694802T3/da active
- 2018-09-28 US US16/755,867 patent/US11312597B2/en active Active
- 2018-09-28 PL PL18789329T patent/PL3694802T3/pl unknown
- 2018-09-28 WO PCT/EP2018/076540 patent/WO2019072600A1/fr unknown
- 2018-09-28 SG SG11202003289QA patent/SG11202003289QA/en unknown
- 2018-09-28 IL IL273870A patent/IL273870B1/en unknown
-
2020
- 2020-03-10 ZA ZA2020/01500A patent/ZA202001500B/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| DK3694802T3 (da) | 2022-02-21 |
| KR102503104B1 (ko) | 2023-02-23 |
| PL3694802T3 (pl) | 2022-02-14 |
| KR20200066699A (ko) | 2020-06-10 |
| FR3072372B1 (fr) | 2019-09-13 |
| IL273870A (en) | 2020-05-31 |
| IL273870B1 (en) | 2024-07-01 |
| US20210198085A1 (en) | 2021-07-01 |
| SG11202003289QA (en) | 2020-05-28 |
| FR3072372A1 (fr) | 2019-04-19 |
| ES2905630T3 (es) | 2022-04-11 |
| WO2019072600A1 (fr) | 2019-04-18 |
| ZA202001500B (en) | 2021-03-31 |
| EP3694802A1 (de) | 2020-08-19 |
| BR112020006552A2 (pt) | 2020-10-13 |
| US11312597B2 (en) | 2022-04-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3694802B1 (de) | Greifvorrichtung für schalen | |
| EP1996832B1 (de) | Hubhaken mit kettenlängenreduzierer | |
| EP3150544B1 (de) | Greifvorrichtung für granate, und entsprechende trage | |
| FR3030436A1 (fr) | Vehicule de type trottinette a pliage assiste | |
| FR2507520A1 (fr) | Pince pour dispositif de levage destine a la manutention de pieces | |
| EP0244323B1 (de) | Hebevorrichtung, insbesondere zur Handhabung und zum Öffnen von Behältern, bestehend aus zwei Klappkokillen | |
| FR2472163A1 (fr) | Appareil destine a lever et transporter des munitions d'artillerie | |
| EP3491327B1 (de) | Vorrichtung zur verriegeln einer granate und trage mit solch einer verriegelungsvorrichtung | |
| FR2692242A1 (fr) | Chariot élévateur à variation d'aplomb par rapport au sol, équipé d'une pince à prise et retrait automatiques d'un fût. | |
| FR2648121A1 (fr) | Dispositif de prehension autoserrant a distance de futs cylindriques | |
| FR2986218A1 (fr) | Systeme de prehension et de levage d'un conteneur de collecte des dechets et de commande d'ouverture/fermeture des trappes de vidage dudit conteneur | |
| FR2593104A1 (fr) | Pince a serrage automatique, en particulier pour blocs de beton. | |
| FR2515298A1 (fr) | Dispositif tendeur, en particulier pour chaines d'arrimage | |
| FR2555145A1 (fr) | Conteneur autodechargeable par systeme de fond ouvrant | |
| FR2602170A1 (fr) | Main mecanique pour la manipulation d'objets | |
| FR3016326A1 (fr) | Dispositif de manutention de charges lourdes, type pot pour plante ou arbuste | |
| FR2659615A2 (fr) | Chariot du type diable, pour la manutention des futs. | |
| FR3024740A1 (fr) | Dispositif de montage rapide d'un outil sur le bras d'une machine | |
| FR2937963A1 (fr) | Dispositif de prehension et de manutention d'une charge, adapte pour etre monte a l'avant d'un chargeur par exemple. | |
| FR2853303A1 (fr) | Dispositif de manutention auto serrant | |
| EP0592322A1 (de) | Hilfsvorrichtung zum Öffnen und Schliessen von einer Lastfahrzeugbordwand | |
| FR3114804A1 (fr) | Machine de retournement d’objet rigide de forme allongée | |
| FR2610271A1 (fr) | Chariot du type diable, pour la manutention des futs | |
| FR2726050A1 (fr) | Dispositif automatique a reglage millimetrique pour l'arret du coulissement relatif de deux elements, et appareillages mettant en oeuvre un tel dispositif | |
| FR2847563A1 (fr) | Dispositif de transfert de conteneurs a dechets et vehicule de collecte de dechets pourvu d'au moins un tel dispositif |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20200331 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: NEXTER SYSTEMS |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20210623 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1451603 Country of ref document: AT Kind code of ref document: T Effective date: 20211215 Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602018027594 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 Effective date: 20220218 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2905630 Country of ref document: ES Kind code of ref document: T3 Effective date: 20220411 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1451603 Country of ref document: AT Kind code of ref document: T Effective date: 20211201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220301 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220301 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220302 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220401 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 602018027594 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20220401 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 |
|
| 26N | No opposition filed |
Effective date: 20220902 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20220930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220930 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220928 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220930 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20220930 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230822 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SK Payment date: 20230830 Year of fee payment: 6 Ref country code: SE Payment date: 20230822 Year of fee payment: 6 Ref country code: PL Payment date: 20230822 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20231002 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20180928 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240820 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211201 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240820 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DK Payment date: 20240820 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240820 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240820 Year of fee payment: 7 |