EP3665115B1 - Handlauf-antriebssystem mit im handlauf integrierten antriebselementen - Google Patents
Handlauf-antriebssystem mit im handlauf integrierten antriebselementen Download PDFInfo
- Publication number
- EP3665115B1 EP3665115B1 EP18745608.2A EP18745608A EP3665115B1 EP 3665115 B1 EP3665115 B1 EP 3665115B1 EP 18745608 A EP18745608 A EP 18745608A EP 3665115 B1 EP3665115 B1 EP 3665115B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- handrail
- drive
- elements
- drive system
- inner contour
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B23/00—Component parts of escalators or moving walkways
- B66B23/02—Driving gear
- B66B23/04—Driving gear for handrails
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66B—ELEVATORS; ESCALATORS OR MOVING WALKWAYS
- B66B23/00—Component parts of escalators or moving walkways
- B66B23/02—Driving gear
- B66B23/024—Chains therefor
Definitions
- the present invention relates to a handrail drive system for an escalator or moving walkway.
- This has a handrail drive with drive elements and a band-shaped, circumferentially movable handrail.
- the WO 200435451 A1 discloses a linear drive system for handrails with a multi-spline profile.
- An essential element of the drive system is a drive belt which has a toothed belt profile on its inside facing away from the handrail. On its outside facing the multi-wedge profile, the drive belt has a counter-profile corresponding to the multi-wedge profile. The drive power is transferred to the handrail by means of this counter profile. Disadvantages of this solution are considerable signs of wear on the wedge profile flanks and the need for pressure rollers that press the multi-wedge profile of the handrail against the multi-wedge profile of the drive belt.
- a handrail drive system of an escalator or a moving walk which has at least one handrail drive with drive elements and a band-shaped handrail that can be moved around the circumference.
- the handrail is delimited by an outer contour designed as a gripping surface and by an inner contour which leaves a cavity in the handrail, the cavity being open to the surroundings of the handrail.
- the handrail drive system is preferably designed as a linear handrail drive system, that is, the handrail in the area the drive elements is essentially guided past them and the drive elements which are in direct contact with the handrail are arranged in one plane.
- the driving force can be transmitted from the drive elements to the handrail on two opposite side surfaces of the inner contour, with all other forces caused by the transmission of the driving force and acting on the side surfaces being mutually compensated by a complementary design of the side surfaces with the exception of the driving force.
- the handrail is made from a soft elastic elastomer material and has sliding elements made from a polymer material which is harder than the soft elastic elastomer material.
- the sliding elements are arranged in sections at discrete intervals along the longitudinal extension of the handrail, with guide elements and / or tooth profiles being formed on the sliding elements.
- a complementary configuration of the side surfaces is understood to mean a configuration that mutually compensates for all forces acting in the area of the driving force transmission on side surfaces, with the exception of the driving force, so that no additional components such as pressure rollers are required.
- the two complementary side surfaces are preferably configured mirror-symmetrically to one another. In the case of an operationally circumferentially arranged handrail, this can be, for example, side surfaces arranged in two parallel, vertical planes which mutually support the contact pressure between the handrail and the drive elements necessary to transmit the driving force.
- the handrail can have a U-shaped or C-shaped cross section along its length.
- the side surfaces do not necessarily have to be flat surfaces. They can also be concave, convex or prism-shaped, provided they have the complementary design specified above.
- tooth profiles to which the driving force can be transmitted are preferably formed on the two opposite sides of the inner contour.
- the inner contour is provided with sliding elements on which guide elements and / or tooth profiles are formed.
- the guide elements interact with handrail guide means, such as a handrail guide profile or guide rollers, which are stationarily arranged on a balustrade of the escalator or the moving walk.
- the guide elements can, for example, be guide grooves matched to the handrail guide profile.
- fabric inlays, sliding friction-reducing surface coatings or sliding elements for example made of a suitable polymer material such as PTFE (polytetrafluoroethylene) or POM (polyoxymethylene) or of a metal such as brass or bronze and the like, can be used as sliding elements.
- the guide elements are preferably combined with the sliding elements.
- the handrail or handrail strap is usually made of a soft elastic elastomer material such as SBR (styrene-butadiene rubber), EPM (ethylene-propylene rubber), EPDM (ethylene-propylene-terpolymer rubber), NBR (acrylonitrile-butadiene rubber), which is constant over its length ) and the like, with tension members such as steel wire strands, carbon fibers or aramid fiber strands being embedded in the elastomer material for reinforcement.
- SBR styrene-butadiene rubber
- EPM ethylene-propylene rubber
- EPDM ethylene-propylene-terpolymer rubber
- NBR acrylonitrile-butadiene rubber
- the handrail is made of a soft elastic elastomer material and the sliding elements are made of a polymer material that is harder than the soft elastic elastomer material.
- the harder sliding elements are arranged in sections at discrete intervals along the longitudinal extension of the handrail and are preferably partially embedded in the elastomer material.
- the guide elements and / or tooth profiles are formed on the sliding elements.
- the handrail strap or handrail designed in this way has a spine-like structure so that it has alternating hard and soft elastic areas. As a result, the handrail can be bent without any problems and highly stressed areas such as sliding surfaces or guide grooves can be formed on the sliding elements.
- the sliding elements can be connected to the tension members embedded in the flexible elastomer material.
- the drive elements of the handrail drive system can comprise at least one circumferentially movable toothed belt.
- the toothed belt can be in contact with the handrail in order to transmit the driving force to the handrail.
- the driving force can be transmitted in a purely force-fitting manner, but it is preferably mainly transmitted in a form-fitting manner, in that a tooth profile that is complementary to the toothed belt is formed on at least one of the two side surfaces of the inner contour. Since, as described above, the handrail is provided with sliding elements, the two side surfaces with the tooth profiles can also be formed on these.
- the drive elements can also comprise at least one transmission gear which engages in a corresponding tooth profile of the side surfaces of the inner contour.
- a large number of arrangements of the drive elements are conceivable, for example pure toothed belt solutions, pure toothed wheel solutions and combinations of toothed wheels and toothed belts.
- the toothed belt can be in engagement with its first strand with the first opposite side of the inner contour and with its second strand it can be in engagement with the at least one transmission gear.
- This arrangement allows the direction of movement or rotation of the second strand to be implemented, so that the direction of rotation of the toothed belt is opposite to the Direction of rotation of the transmission gear is.
- the transmission gear can be in engagement with the second opposite side of the inner contour.
- the toothed belt can be guided between at least two gears and be in operative connection with them, so that the two gears have opposite directions of rotation and the first of the two gears is in engagement with the first opposite side of the inner contour and the second of the two gears is in engagement with the second opposite side of the inner contour.
- At least one balustrade with a handrail guide means or handrail guide profile. At least some of the drive elements can be integrated in the handrail guide means.
- the drive elements described above can be driven by an angular gear arranged in the handrail guide means and a motor and together form a handrail drive.
- angular gear arranged in the handrail guide means and a motor and together form a handrail drive.
- several such handrail drives are used to drive a single handrail, the speeds of which must then be precisely coordinated with one another.
- the toothed belt can be guided by the handrail guide means through the balustrade, through a balustrade base connecting the balustrade to a supporting structure of the moving walk or the escalator, and around a drive wheel arranged in the supporting structure.
- the drive wheel can be driven by the step belt or by a motor arranged in the supporting structure.
- the handrail drive system can be used in an escalator as well as in a moving walkway. These usually have two balustrades, which are arranged on both sides of a step band or pallet band and each have a circumferential handrail. Accordingly, per escalator or moving walk are at least provide two handrail drive systems.
- the present invention has the particular advantage that the handrail drive system is very small and can therefore be installed at any point on the balustrade.
- the circumferential arrangement of the handrail means that there is a handrail forwards and a handrail return, whereby the user can hold on to the handrail in the area of the handrail forwards.
- very different tensile forces act on the handrail, depending on the section. Since the handrail drive system is not tied to the available installation space, it can be installed where the ideal installation location is due to the expected load.
- the tensile forces in the upper level in the handrail flow are highest when the escalator conveys from the lower level to the upper level.
- the drive elements are therefore preferably arranged there.
- FIG. 1 shows a schematic side view of an escalator 1 according to the prior art, with the aid of which people can be transported, for example, between two levels E1, E2.
- the escalator 1 has a load-bearing structure 2 in the form of a framework, which, for the sake of clarity, is only shown in its outlines.
- the supporting structure 2 accommodates components of the escalator 1 and supports them within a building. These components include, for example, balustrades 3 (only one is visible due to the side view) which have a handrail 5 arranged around the circumference.
- the balustrades 3 are connected to the supporting structure 2 via balustrade bases 4.
- the escalator 1 also has two annularly closed, revolving conveyor chains 11, only one being visible due to the side view.
- the two conveyor chains 11 are composed of a large number of chain links.
- the two conveyor chains 11 can be shifted along a travel path 8 in travel directions.
- the conveyor chains 11 run parallel to one another and are spaced apart from one another in a direction transverse to the direction of travel. In the end areas adjacent to the levels E1, E2, the conveyor chains 11 are deflected by deflecting chain wheels 15, 16.
- a plurality of step elements 9 in the form of steps are arranged between the two conveyor chains 11, these connecting the conveyor chains 11 to one another transversely to the travel path 8. With the aid of the conveyor chains 11, the tread elements 9 can be moved in the directions of travel along the travel path 8.
- the step elements 9 guided on the conveyor chains 11 form a step belt 10, in which the step elements 9 are arranged one behind the other along the travel path 8 and can be accessed by users in at least one conveyor area 19.
- the circumferential step belt 10 is guided by schematically illustrated guide rails 12 and supported against gravity. These guide rails 12 are arranged in a stationary manner in the supporting structure 2.
- the chain wheels 16 of the upper level E2 are connected to the drive arrangement 25.
- the drive assembly 25 is by means of a controller 24 (which in Figure 1 is only indicated very schematically) controlled.
- the revolving belt 10, together with the drive arrangement 25 and the deflection wheels 15, 16, form a conveying device for users and objects, the step elements 9 of which can be displaced relative to the load-bearing structure 2, which is fixedly anchored in the building.
- the handrail 5 or the circumferential handrail belt 5 is driven via drive elements 6 which, for example, can be functionally connected to the drive arrangement 25 of the escalator 1.
- the handrail 5 and the drive elements 6 are essential parts of a handrail drive system 20. If the handrail drive system 20 has its own motor, it also includes a handrail control 23, which is integrated in the escalator control 24 in the present example.
- the correct tension of the handrail 5 is maintained by means of a handrail tensioning device 7, which is only shown schematically.
- the Figure 2 shows schematically the tensile stress curve F of in the handrail 5
- Figure 1 shown handrail drive system 20, wherein the tensile stress curve F is shown over the entire circumference of the handrail 5 and represents the tensile force acting in the longitudinal extension of the handrail 5.
- the handrail drive system 20 with its most essential parts, such as the handrail 5 and the drive elements 6 designed as a friction wheel 22 and guide rollers 21, is shown.
- the illustration of the tensile stress profile F relates to a travel path 8 conveying from the floor E1 to the floor E2 and to an average load on the handrail 5 by users holding onto it.
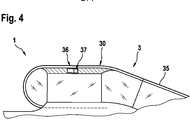
- the Figure 3 shows schematically a handrail drive system 30 according to the invention with a handrail drive 37 having drive elements 36 and a handrail 35 matched to the drive elements 36. Furthermore, the tensile stress curve F present in the handrail 35 is shown, which, with the same travel path 8, clearly differs from the tensile stress curve F of Figure 2 differs because the drive elements 36 of the handrail drive system 30 are arranged in an ideal position. It can be clearly seen here that the tensile stresses are already reduced to the level of the tensile stress existing by the handrail tensioning device 7 before the balustrade deflection arch 13. This drastically reduces the wear on the handrail 35 and on the handrail guide means (not shown) and significantly reduces the service life of the handrail 35 and the energy consumption of the escalator during operation.
- balustrade in particular a glass balustrade such as is commonly used in escalators and moving walks for department stores and airports.
- a handrail drive system 30 with drive elements 36 can be used which have significantly smaller dimensions than the drive elements 6 in FIG Figure 1 handrail drive system 20 shown.
- the Figure 4 shows as a first embodiment of the invention a section of a glass balustrade 3 of an only partially shown escalator 1 or a moving walk 1 with a handrail drive system 30. Its handrail drive 37 with its drive elements 36 is according to FIG Figure 3 arranged in an ideal position in the immediate vicinity of the handrail 35 in the glass balustrade 3.
- the Figure 5 shows in three-dimensional, larger view details of the in the Figure 4 illustrated handrail drive system 30.
- the handrail drive system 30 has a handrail drive 37 and a circumferential handrail 35, of which in the Figure 5 only one section is shown.
- the handrail drive 37 essentially comprises drive elements 36, a motor 38 and an angular gear 39.
- the handrail 35 is also shown partially transparent, but has been shown for reasons of clarity an illustration of embedded sliding elements and tension members is omitted.
- the motor 38 and the angular gear 39 are integrated in the glass balustrade 3, their housings being fastened to a glass panel 40 of the glass balustrade 3 by means of corresponding flange attachments 41.
- the motor 38 is connected via electrical lines 54, for example, to the one in FIG Figure 1 shown handrail control 23 connected.
- the housings have connection points for handrail guide means 42, 43 or handrail guide profiles 42, 43.
- the drive elements 36 comprise a toothed belt 45, a belt gearwheel 46, transmission gearwheels 47, support gearwheels 48 and a belt tensioning wheel 49.
- the angular gear 39 has an output shaft 50 which is connected to the belt gearwheel 46.
- the toothed belt 45 is guided around the belt toothed wheel 46 and the belt tensioning wheel 49, which is arranged at a distance from the belt toothed wheel 46 and which keeps the toothed belt 45 tensioned by a tension spring 51.
- the support gears 48 four in the present exemplary embodiment, are arranged in a horizontal plane between the first strand 52 and the second strand 53 of the toothed belt 45.
- the transmission gears 47 are also arranged in the same plane, likewise four in the present exemplary embodiment.
- the transmission gears 47 are driven by the second strand 53 of the toothed belt 45, the direction of rotation of the toothed belt 45 being opposite to the direction of rotation of the transmission gears 47.
- the handrail 35 is delimited by an outer contour 61 designed as a gripping surface and by an inner contour 62 which leaves a cavity 60 in the handrail 35.
- the cavity 60 is open to the surroundings of the handrail 35, so that it has a C-shaped cross section 70.
- Two side surfaces 63, 64 arranged opposite one another are present on the inner contour 62.
- the two side surfaces 63, 64 each have a tooth profile which extends in the longitudinal extension L of the handrail 35 and has the same tooth profile module as the toothed belt 45 and the transmission gears 47.
- guide elements 44 are formed on the inner contour 62, which are matched to the handrail guide means 42, 43.
- the driving force is transmitted from the drive elements 36 to the handrail 35 on the two opposite side surfaces 63, 64 of the inner contour 62.
- the toothed belt 45 is in engagement with its first run 52 with the first opposite side surface 63 of the inner contour 62 and the transmission gears 47 in engagement with the second opposite side surface 64.
- a complementary configuration of the side surfaces 63, 64 is to be understood as a configuration which mutually compensates for all forces P1, P2, P3, P4 acting in the area of the driving force transmission on side surfaces 63, 64 with the exception of the driving force, so that no additional components such as the pressure rollers known in the prior art are required.
- the two complementary side surfaces 63, 64 are preferably designed mirror-symmetrically to one another.
- this can be, for example, in two parallel, vertical planes side surfaces 63, 64 that mutually generate the force P1, P2 or contact pressure necessary to transmit the driving force or, as in the present example, forces P1, P2 caused by tooth flanks , P3, P4.
- the cross-section 70 of the handrail 35 is preferably designed to be sufficiently deformation-resistant with respect to the forces P1, P2 acting on the side surfaces 63, 64, so that they do not spread the C-shaped cross-section 70.
- the Figure 6 shows schematically a second embodiment of a glass balustrade 3 of an escalator 1 or a moving walkway with a handrail drive system 80, which corresponds to FIG Figure 3 is arranged at an ideal position.
- the handrail drive system 80 comprises a handrail 35 and drive elements 86 integrated in the glass balustrade 3, the handrail 35 being supported by the Figure 1 shown
- the Figure 7 shows the in the Figure 6 indicated section AA in an enlarged view with part of the arranged in the handrail 35 drive elements 86 of the Figure 6 handrail drive system 80 shown.
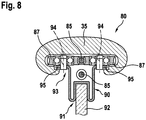
- Figure 8 shows the in the Figure 6 specified section BB in an enlarged view of the in Figures 6 and 7 handrail drive system 80 shown.
- the further drive elements 86 comprise transmission gears 87 which are arranged in two rows 88, 89 in a horizontal plane in a handrail guide means 90 or handrail guide profile 90 of the glass balustrade 3. Since the toothed belt 85 is passed between the two rows 88, 89, the transmission gears 87 of the two rows have opposite directions of rotation.
- the transmission gears 87 transmit the driving force of the toothed belt 85 in a form-fitting manner to the two side surfaces 63, 64 of the handrail 35.
- the axles 94 of the transmission gears 87 are attached and guide elements 95 are formed on its upper side 93.
- the Figures 9 and 10 show a section of a possible configuration of a handrail 105 with and its cross section.
- the handrail 105 or handrail strap is usually made of a soft elastic elastomer material 107, which is constant over its longitudinal extent L such as SBR (styrene butadiene rubber), EPM (ethylene propylene rubber), EPDM (ethylene propylene terpolymer rubber), NBR (acrylonitrile butadiene rubber) and the like, with tension members 108 such as steel wire strands for reinforcement , Carbon fibers or aramid fiber strands are embedded in the elastomer material 107.
- SBR styrene butadiene rubber
- EPM ethylene propylene rubber
- EPDM ethylene propylene terpolymer rubber
- NBR acrylonitrile butadiene rubber
- sliding elements 106 are partially embedded in the elastomer material 107 of the handrail 105, which are harder than the soft elastic elastomer material 107.
- the sliding elements 106 can be made of a hard elastic polymer material or a non-ferrous metal, which have a low coefficient of friction to other materials such as steel.
- Such materials can be, for example, PTFE (polytetrafluoroethylene), POM (polyoxymethylene), brass or bronze and the like.
- the harder sliding elements 106 are arranged in sections at discrete intervals along the longitudinal extension L of the handrail 105.
- the handrail 105 or handrail strap designed in this way has a spine-like structure, so that it has alternating hard and soft elastic areas over its longitudinal extent L.
- the handrail 105 can be bent without any problems and highly stressed areas such as sliding surfaces 113 and / or guide grooves can be formed on the sliding elements 106.
- the sliding elements 106 are provided with guide elements 109 designed as grooves. In the operational state, the guide elements 109 interact with handrail guide means, such as the one in FIG. 2, which are stationarily arranged on a balustrade 3 of the escalator 1 or the moving walk Figure 8 Handrail guide profile 90 shown.
- the two side surfaces 110, 111 provided for the transmission of driving force are also formed on the sliding elements 106.
- toothed profiles 112 or toothed profile sections 112 are formed on the side surfaces 110, 111 that are matched to the drive elements (not shown).
- the sliding elements 106 are firmly connected to the tension members 108 embedded in the flexible elastomer material 107.
- the Figure 11 shows a section of a further possible embodiment of a handrail drive system 120, which comprises a handrail 125 and drive elements 126, in a sectional view.
- the Figure 12 shows the in the Figure 11 specified cross-section of the handrail drive system 120.
- the two side surfaces 63, 64, 110, 111 of the handrail 35, 105 are arranged on the two opposite sides of the inner contour 62 of the two legs of the U-shaped or C-shaped cross-section.
- a handrail drive system 120 with a handrail 125 is also possible, the inner contour 122 of which has a central web 121 extending in the longitudinal extension L of the handrail 125, on which the two side surfaces 123, 124 on the two opposite sides of the central web 121, respectively the inner contour 122 are formed.
- the side surfaces 123, 124 do not necessarily have to be flat, vertical surfaces. They can also be concave, convex or prism-shaped, provided they have the complementary design specified above.
- tension members 128 are embedded in the elastomer material of the handrail 125 and guide elements 129 designed as grooves are arranged on the inner contour 122 in the longitudinal extent L of the handrail.
- a form-fitting transmission of the driving force is provided so that tooth profiles 127 are formed on the two opposite sides of the inner contour 122, to which the driving force can be transmitted is.
- the drive elements 126 include six transmission gears 131 which are arranged in pairs, the central web 121 being passed through between the individual gear pairs so that the teeth of the transmission gears 131 engage in the tooth profiles 127 of the handrail 125.
- the remaining components of the drive elements 126 such as the engine and transmission parts through which the Transmission gears 131 are driven, are combined with these as a handrail drive 130 housed in a drive housing 138 and are therefore not visible.
- Handrail guide means 132 and flange attachments 133 are formed on the drive housing 138.
- the drive housing 138 can be fastened to a glass panel 92 of the glass balustrade 3 with the flange attachments 133.
- the drive housing 138 can also have connection points 135 to handrail guide means (not shown) of the balustrade 3.
- the motor arranged in the drive housing 138 is connected, for example, to the motor in FIG Figure 1 shown handrail control 23 connected.
- the handrail control 23 can also be integrated in the drive housing 138.
Landscapes
- Escalators And Moving Walkways (AREA)
Description
- Die vorliegende Erfindung betrifft ein Handlauf- Antriebssystem für eine Fahrtreppe oder einen Fahrsteig. Dieses weist einen Handlaufantrieb mit Antriebselementen und einen bandförmig ausgebildeten, umlaufend bewegbaren Handlauf auf.
- Die
WO 200435451 A1 JP H07 267562 A JP 2004 115267 A - Es kann unter anderem ein Bedarf an einem Handlauf- Antriebssystem bestehen, dessen Antriebselemente an nahezu jeder gewünschten Einbauposition innerhalb der Fahrtreppe oder des Fahrsteiges einbaubar sind.
- Einem solchen Bedarf kann durch ein Handlauf- Antriebssystem einer Fahrtreppe oder eines Fahrsteiges entsprochen werden, das mindestens einen Handlaufantrieb mit Antriebselementen und einen bandförmig ausgebildeten, umlaufend bewegbaren Handlauf aufweist. Der Handlauf ist durch eine als Grifffläche ausgestaltete Außenkontur und durch eine im Handlauf eine Kavität aussparende Innenkontur begrenzt, wobei die Kavität zur Umgebung des Handlaufes offen ist. Dadurch kann der Handlauf materialsparend gefertigt werden. Das Handlauf- Antriebssystem ist vorzugsweise als lineares Handlauf- Antriebssystem ausgestaltet, das heißt, dass der Handlauf im Bereich der Antriebselemente im Wesentlichen gerade an diesen vorbeigeführt ist und die unmittelbar mit dem Handlauf in Kontakt stehenden Antriebselemente in einer Ebene angeordnet sind. Die Treibkraft ist von den Antriebselementen auf den Handlauf an zwei einander gegenüberliegend angeordneten Seitenflächen der Innenkontur übertragbar, wobei durch eine komplementäre Ausgestaltung der Seitenflächen mit Ausnahme der Treibkraft alle weiteren, durch die Übertragung der Treibkraft verursachten und an den Seitenflächen wirkenden Kräfte gegenseitig kompensiert sind.
- Gemäß einem Aspekt der Erfindung wird vorgeschlagen, dass der Handlauf aus einem weichelastischen Elastomermaterial gefertigt ist und Gleitelemente aufweist, die aus einem Polymermaterial gefertigt sind, welches härter ist als das weichelastische Elastomermaterial. Die Gleitelemente sind abschnittsweise in diskreten Abständen entlang der Längserstreckung des Handlaufs angeordnet, wobei Führungselemente und/oder Zahnprofile an den Gleitelementen ausgebildet sind.
- In Bezug auf die vorliegende Erfindung ist unter einer komplementären Ausgestaltung der Seitenflächen eine Ausgestaltung zu verstehen, die alle zwischen den im Bereich der Treibkraftübertragung an Seitenflächen wirkenden Kräfte mit Ausnahme der Treibkraft gegenseitig kompensiert, so dass keine zusätzlichen Bauteile wie beispielsweise Andruckrollen erforderlich sind. Vorzugsweise sind die beiden komplementär ausgestalteten Seitenflächen spiegelsymmetrisch zueinander ausgebildet. Dies können bei einem betriebsbereit umlaufend angeordneten Handlauf beispielsweise in zwei zueinander parallelen, vertikalen Ebenen angeordnete Seitenflächen sein, die die zur Übertragung der Treibkraft notwendige Anpresskraft zwischen dem Handlauf und den Antriebselementen gegenseitig abstützen.
- Mögliche Merkmale und Vorteile von Ausführungsformen der Erfindung können unter anderem als auf nachfolgend beschriebenen Ideen und Erkenntnissen beruhend angesehen werden.
- Gemäss einem weiteren Aspekt der Erfindung kann der Handlauf entlang seiner Längserstreckung einen U-förmig oder C-förmig ausgestalteten Querschnitt aufweisen. Hierbei können die beiden Seitenflächen an den zwei einander gegenüberliegenden Seiten der Innenkontur der beiden Schenkel des U-förmig oder C-förmig ausgestalteten Querschnitts angeordnet sein. Möglich ist auch ein in der Innenkontur ausgebildeter, sich in der Längsrichtung des Handlaufs erstreckender Mittelsteg, an dem die beiden Seitenflächen ausgebildet sind. Die Seitenflächen müssen nicht zwingend ebene Flächen sein. Sie können auch konkav, konvex oder prismenförmig ausgebildet sein, sofern sie die vorangehend spezifizierte, komplementäre Ausgestaltung aufweisen.
- Um die Traktion zwischen den Antriebselementen und dem umlaufend angeordneten Handlauf zu verbessern, kann auch eine formschlüssige Übertragung der Treibkraft vorgesehen sein. Vorzugsweise sind deshalb an den zwei einander gegenüberliegenden Seiten der Innenkontur Zahnprofile ausgebildet, an die die Treibkraft übertragbar ist.
- Wie bereits erwähnt, ist die Innenkontur mit Gleitelementen versehen, an denen Führungselemente und/oder Zahnprofile ausgebildet sind. Die Führungselemente sind in betriebsbereitem Zustand in Interaktion mit an einer Balustrade der Fahrtreppe oder des Fahrsteiges stationär angeordneten Handlaufführungsmitteln wie beispielsweise ein Handlaufführungsprofil oder Führungsrollen. Hierbei können die Führungselemente beispielsweise auf das Handlaufführungsprofil abgestimmte Führungsnuten sein. Als Gleitelemente können beispielsweise Gewebeeinlagen, gleitreibungsmindernde Oberflächenbeschichtungen oder eingesetzte Gleitelemente, beispielsweise aus einem geeigneten Polymermaterial wie PTFE (Polytetrafluoräthylen) oder POM (Polyoxymethylen) oder aus einem Metall wie beispielsweise Messing oder Bronze und dergleichen mehr eingesetzt werden. Vorzugsweise werden die Führungselemente mit den Gleitelementen kombiniert.
- Der Handlauf beziehungsweise Handlaufriemen ist üblicherweise über seine Längserstreckung gleichbleibend aus einem weichelastischen Elastomermaterial wie SBR (Styrol-Butadien Kautschuk), EPM (Ethylen-Propylen-Kautschuk), EPDM (Ethylen-Propylen-Terpolymere-Kautschuk), NBR (Acrylnitril-Butadien-Kautschuk) und dergleichen mehr gefertigt, wobei zur Verstärkung Zugträger wie Stahldrahtlitzen, Kohlefasern oder Aramidfaserlitzen im Elastomermaterial eingebettet sind.
- Es ist aber auch möglich, dass der Handlauf aus einem weichelastischen Elastomermaterial gefertigt ist und die Gleitelemente aus einem Polymermaterial gefertigt sind, das härter als das weichelastische Elastomermaterial ist. Die härteren Gleitelemente sind abschnittsweise in diskreten Abständen entlang der Längserstreckung des Handlaufs angeordnet und vorzugsweise teilweise im Elastomermaterial eingebettet. Die Führungselemente und/oder Zahnprofile sind an den Gleitelementen ausgebildet. Der derart ausgebildete Handlaufriemen beziehungsweise Handlauf weist einen Wirbelsäule-ähnlichen Aufbau auf, so dass dieser alternierend hart- und weichelastische Bereiche aufweist. Dadurch lässt sich der Handlauf problemlos biegen und hochbeanspruchte Bereiche wie Gleitflächen oder Führungsnuten lassen sich an den Gleitelementen ausbilden.
- Um die Formstabilität des Handlaufs auch in der Längserstreckung zu erhalten, können die Gleitelemente mit den im weichelastischen Elastomermaterial eingebetteten Zugträger verbunden sein.
- Um den umlaufend angeordneten Handlauf anzutreiben, können die Antriebselemente des Handlauf- Antriebssystems zumindest einen umlaufend bewegbaren Zahnriemen umfassen. Der Zahnriemen kann hierbei mit dem Handlauf in Kontakt stehen, um die Treibkraft auf den Handlauf zu übertragen. Die Treibkraft kann rein kraftschlüssig übertragen werden, vorzugsweise wird sie aber hauptsächlich formschlüssig übertragen, indem zumindest an einer der beiden Seitenflächen der Innenkontur ein zum Zahnriemen komplementäres Zahnprofil ausgebildet ist. Da wie vorangehend beschrieben, der Handlauf mit Gleitelementen versehen ist, können die beiden Seitenflächen mit den Zahnprofilen auch an diesen ausgebildet sein.
- Die Antriebselemente können aber auch zumindest ein Übertragungszahnrad umfassen, welches in ein entsprechendes Zahnprofil der Seitenflächen der Innenkontur eingreift. Es sind eine Vielzahl von Anordnungen der Antriebselemente denkbar, beispielsweise reine Zahnriemenlösungen, reine Zahnradlösungen sowie Kombinationen von Zahnrädern und Zahnriemen.
- In einer möglichen Anordnung der Antriebselemente kann der Zahnriemen mit seinem ersten Trum mit der ersten gegenüberliegenden Seite der Innenkontur in Eingriff sein und mit seinem zweiten Trum mit dem mindestens ein Übertragungszahnrad in Eingriff sein. Durch diese Anordnung lässt sich die Bewegungs- beziehungsweise Drehrichtung des zweiten Trums umsetzen, so dass der Umlaufsinn des Zahnriemens gegensätzlich zum Drehsinn des Übertragungszahnrads ist. Hierdurch kann das Übertragungszahnrad mit der zweiten gegenüberliegenden Seite der Innenkontur in Eingriff sein.
- In einer weiteren möglichen Anordnung der Antriebselemente kann der Zahnriemen zwischen mindestens zwei Zahnrädern geführt und in Wirkverbindung mit diesen sein, so dass die beiden Zahnräder einen gegensätzlichen Drehsinn aufweisen und das erste der beiden Zahnräder mit der ersten gegenüberliegenden Seite der Innenkontur in Eingriff ist und das zweite der beiden Zahnräder mit der zweiten gegenüberliegenden Seite der Innenkontur in Eingriff ist.
- Zum Tragen und führen des umlaufend angeordneten Handlaufs ist vorzugsweise mindestens eine Balustrade mit einem Handlaufführungsmittel beziehungsweise Handlaufführungsprofil vorhanden. Zumindest ein Teil der Antriebselemente kann im Handlaufführungsmittel integriert sein.
- Die vorangehend beschriebenen Antriebselemente können durch ein im Handlaufführungsmittel angeordnetes Winkelgetriebe und einen Motor angetrieben werden und zusammen einen Handlaufantrieb bilden. Selbstverständlich ist es auch möglich, dass mehrere solche Handlaufantriebe zum Antreiben eines einzelnen Handlaufs verwendet werden, wobei deren Drehzahlen dann genau aufeinander abgestimmt werden müssen.
- Ferner müssen nicht zwingend alle Bauteile des der Handlaufantriebes vollständig in der Balustrade oder im Handlaufführungsmittel angeordnet sein. Beispielsweise kann der Zahnriemen vom Handlaufführungsmittel durch die Balustrade, durch einen die Balustrade mit einem Tragwerk des Fahrsteiges oder der Fahrtreppe verbindenden Balustradensockel und um ein im Tragwerk angeordnetes Antriebsrad geführt sein. Das Antriebsrad kann durch das Stufenband oder durch einen im Tragwerk angeordneten Motor angetrieben werden.
- Das Handlauf-Antriebssystem kann sowohl in einer Fahrtreppe, als auch in einem Fahrsteig verwendet werden. Diese haben üblicherweise zwei Balustraden, die zu beiden Seiten eines Stufenbandes oder Palettenbandes angeordnet sind und je einen umlaufenden Handlauf aufweisen. Dementsprechend sind pro Fahrtreppe oder Fahrsteig mindestens zwei Handlauf-Antriebssysteme vorzusehen.
- Die vorliegende Erfindung hat insbesondere den Vorteil, dass das Handlauf-Antriebssystem sehr klein baut und darum an jeder Stelle der Balustrade eingebaut werden kann. Durch die umlaufende Anordnung des Handlaufs ist ein Handlaufvorlauf und ein Handlaufrücklauf vorhanden, wobei die Benutzer sich im Bereich des Handlaufvorlaufs am Handlauf festhalten können. Hierdurch wirken am Handlauf je nach Abschnitt sehr unterschiedliche Zugkräfte. Da das Handlauf-Antriebssystem nicht an den zur Verfügung stehenden Bauraum gebunden ist, kann es dort eingebaut werden, wo aufgrund der zu erwartenden Belastung der ideale Einbauort ist. Bei einer Fahrtreppe, die eine untere Ebene eines Bauwerkes mit einer oberen Ebene eines Bauwerkes verbindet, sind die Zugkräfte in der oberen Ebene im Handlaufvorlauf am höchsten, wenn die Fahrtreppe von der unteren Ebene zur oberen Ebene hin fördert. Vorzugsweise sind deshalb die Antriebselemente dort angeordnet.
- Es wird daraufhingewiesen, dass einige der möglichen Merkmale und Vorteile der Erfindung hierin mit Bezug auf unterschiedliche Ausführungsformen beschrieben sind. Ein Fachmann erkennt, dass die Merkmale in geeigneter Weise kombiniert, angepasst oder ausgetauscht werden können, um zu weiteren Ausführungsformen der Erfindung zu gelangen. Der Schutzumfang der Erfindung wird durch die beigefügten Ansprüche bestimmt.
- Nachfolgend werden Ausführungsformen der Erfindung unter Bezugnahme auf die beigefügten Zeichnungen beschrieben, wobei weder die Zeichnungen noch die Beschreibung als die Erfindung einschränkend auszulegen sind.
-
Figur 1 zeigt schematisch die Seitenansicht einer Fahrtreppe mit einem Handlauf-Antriebsystem gemäss dem Stand der Technik. -
Figur 2 zeigt schematisch den vorhandenen Zugspannungsverlauf im Handlauf der in derFigur 1 dargestellten Fahrtreppe. -
Figur 3 zeigt schematisch den im Handlauf einer Fahrtreppe vorhandenen Zugspannungsverlauf, wenn der Handlaufantrieb des Handlauf-Antriebssystems an einer idealen Position angeordnet ist. -
Figur 4 zeigt ein erstes Ausführungsbeispiel einer Glasbalustrade einer Fahrtreppe oder eines Fahrsteiges mit einem Handlauf-Antriebssystem, dessen Handlaufantrieb gemäss derFigur 3 an einer idealen Position in unmittelbarer Nähe zum Handlauf in der Glasbalustrade angeordnet ist. -
Figur 5 zeigt in dreidimensionaler, größerer Ansicht Details des in derFigur 4 dargestellten Handlauf-Antriebssystems. -
Figur 6 zeigt ein zweites Ausführungsbeispiel einer Glasbalustrade einer Fahrtreppe oder eines Fahrsteiges mit einem Handlauf-Antriebssystem, dessen Antriebselemente gemäss derFigur 3 an einer idealen Position in unmittelbarer Nähe zum Handlauf in der Glasbalustrade angeordnet sind, wobei diese durch die Antriebsanordnung des Fahrsteiges oder der Fahrtreppe angetrieben werden. -
Figur 7 zeigt in geschnittenem Grundriss ein Teil der im Handlauf angeordneten Antriebselemente des in derFigur 6 dargestellten Handlauf-Antriebssystems. -
Figur 8 zeigt einen Ausschnitt des Querschnitts des in denFiguren 6 und 7 dargestellten Handlauf-Antriebssystems. -
Figur 9 zeigt in geschnittener Darstellung einen Abschnitt einer möglichen Ausgestaltung des Handlaufs mit Gleitelementen. -
Figur 10 zeigt den in derFigur 9 angegebenen Querschnitt des Handlaufs mit Gleitelementen. -
Figur 11 zeigt in geschnittener Darstellung einen Abschnitt einer weiteren möglichen Ausgestaltung eines Handlauf-Antriebssystems, wobei der Handlauf einen Mittelsteg aufweist, an dem die beiden Seitenflächen ausgebildet sind. -
Figur 12 zeigt den in derFigur 11 angegebenen Querschnitt des Handlauf-Antriebsystems. - Die Figuren sind lediglich schematisch und nicht maßstabsgetreu. Gleiche Bezugszeichen bezeichnen in den verschiedenen Figuren gleiche oder gleichwirkende Merkmale.
-
Figur 1 zeigt schematisch in der Seitenansicht eine Fahrtreppe 1 gemäss dem Stand der Technik, mithilfe derer Personen beispielsweise zwischen zwei Niveaus E1, E2 befördert werden können. Die Fahrtreppe 1 weist eine tragende Struktur 2 in Form eines Fachwerks auf, die der besseren Übersicht wegen nur in ihren Umrisslinien dargestellt ist. Die tragende Struktur 2 nimmt Komponenten der Fahrtreppe 1 auf und stützt diese innerhalb eines Gebäudes ab. Zu diesen Komponenten gehören beispielsweise Balustraden 3 (aufgrund der Seitenansicht nur eine sichtbar), die einen umlaufend angeordneten Handlauf 5 aufweisen. Die Balustraden 3 sind über Balustradensockel 4 mit der tragenden Struktur 2 verbunden. - Die Fahrtreppe 1 weist ferner zwei ringförmig geschlossene, umlaufende Förderketten 11 auf, wobei aufgrund der Seitenansicht nur eine sichtbar ist. Die beiden Förderketten 11 sind aus einer Vielzahl von Kettengliedern zusammengesetzt. Die beiden Förderketten 11 können entlang eines Verfahrweges 8 in Verfahrrichtungen verlagert werden. Die Förderketten 11 verlaufen parallel zueinander und sind dabei in einer Richtung quer zu der Verfahrrichtung voneinander beabstandet. In Endbereichen angrenzend an die Niveaus E1, E2 werden die Förderketten 11 durch Umlenkkettenräder 15, 16 umgelenkt.
- Zwischen den beiden Förderketten 11 sind mehrere Trittelemente 9 in Form von Trittstufen angeordnet, wobei diese die Förderketten 11 quer zum Verfahrweg 8 miteinander verbinden. Mit Hilfe der Förderketten 11 können die Trittelemente 9 in den Verfahrrichtungen entlang des Verfahrweges 8 verfahren werden. Die an den Förderketten 11 geführten Trittelemente 9 bilden dabei ein Stufenband 10, bei dem die Trittelemente 9 entlang des Verfahrweges 8 hintereinander angeordnet sind und zumindest in einem Förderbereich 19 von Benutzern betreten werden können. Das umlaufende Stufenband 10 wird durch schematisch dargestellte Führungsschienen 12 geführt und gegen die Schwerkraft abgestützt. Diese Führungsschienen 12 sind in der tragenden Struktur 2 ortsfest angeordnet.
- Um die Förderketten 11 verlagern zu können, sind die Kettenräder 16 des oberen Niveaus E2 mit der Antriebsanordnung 25 verbunden. Die Antriebsanordnung 25 wird mittels einer Steuerung 24 (welche in
Figur 1 lediglich sehr schematisch angedeutet ist) gesteuert. Das umlaufende Band 10 bildet zusammen mit der Antriebsanordnung 25 und den Umlenkrädern 15, 16 eine Fördereinrichtung für Benutzer und Gegenstände, deren Trittelemente 9 relativ zu der in dem Gebäude stationär fest verankerten, tragenden Struktur 2 verlagert werden können. - Der Handlauf 5 beziehungsweise der umlaufende Handlaufriemen 5 wird über Antriebselemente 6 angetrieben, die beispielsweise mechanisch mit der Antriebsanordnung 25 der Fahrtreppe 1 wirkverbunden sein können. Der Handlauf 5 und die Antriebselemente 6 sind wesentliche Teile eines Handlauf-Antriebssystems 20. Sofern das Handlauf-Antriebssystem 20 über einen eigenen Motor verfügt, gehört auch eine Handlaufsteuerung 23 dazu, die im vorliegenden Beispiel in der Fahrtreppensteuerung 24 integriert ist. Die richtige Spannung des Handlaufs 5 wird mittels einer nur schematisch dargestellten Handlauf- Spanneinrichtung 7 aufrechterhalten.
- Die
Figur 2 zeigt schematisch den im Handlauf 5 vorhandene Zugspannungsverlauf F des in derFigur 1 gezeigten Handlauf-Antriebssystems 20, wobei der Zugspannungsverlauf F über den ganzen Umfang des Handlaufs 5 dargestellt ist und die in der Längserstreckung des Handlaufs 5 wirkende Zugkraft repräsentiert. Aus Gründen der Übersichtlichkeit ist nur das Handlauf-Antriebsystem 20 mit dessen wesentlichsten Teilen, wie der Handlauf 5 und die als Friktionsrad 22 und Führungsrollen 21 ausgebildeten Antriebselementen 6 dargestellt. Die Darstellung des Zugspannungsverlaufs F bezieht sich dabei auf einen von der Etage E1 zur Etage E2 fördernden Verfahrweg 8 sowie auf eine durchschnittliche Belastung des Handlaufs 5 durch sich daran festhaltende Benutzer. Hierbei ist offensichtlich, dass im Handlaufvorlauf 14 die im Handlauf 5 wirkende Zugkraft durch die Reibungskräfte und die sich festhaltenden Benutzer ansteigt und in der oberen Etage E2 bis zu den Antriebselementen 6 am höchsten ist, während sie im Handlaufrücklauf 18 auf das Niveau der Vorspannkraft fällt. Solange wie beispielsweise in den geraden Abschnitten keine Richtungsänderung des Handlaufs erfolgt, ist eine hohe Zugkraft und damit eine hohe Zugspannung kein Problem, da diese üblicherweise durch einen oder mehrere nicht dargestellte Zugträger des Handlaufs 5 aufgenommen wird. Bei Richtungsänderungen wie beispielsweise im Bereich des oberen Balustraden-Umlenkbogens 13, führen die hohen Zugkräfte jedoch zu hohen Radialkräften FR, so dass der Handlauf 5 in Zusammenwirkung mit Handlauführungsmittel (in denFiguren 5 ,8 ,11 und 12 dargestellt) der Balustrade 3 insbesondere an diesen Stellen einem hohen Verschleiß unterworfen ist. Bei umgekehrtem Umlaufsinn des Handlaufs 5 ist logischerweise ein etwas anderer Zugspannungsverlauf F zu erwarten, dieser hängt jedoch insbesondere von den zwischen dem Handlaufführungsmittel und den Führungselementen des Handlaufs 5 auftretenden Reibungskräften ab. - Die
Figur 3 zeigt schematisch ein erfindungsgemäßes Handlauf- Antriebsystem 30 mit einem Antriebselemente 36 aufweisenden Handlaufantrieb 37 und einem auf die Antriebselemente 36 abgestimmten Handlauf 35. Ferner ist der im Handlauf 35 vorhandene Zugspannungsverlauf F dargestellt, der sich bei gleichem Verfahrweg 8 deutlich vom Zugspannungsverlauf F derFigur 2 unterscheidet, da die Antriebselemente 36 des Handlauf-Antriebssystems 30 an einer idealen Position angeordnet sind. Hierbei ist klar erkennbar, dass die Zugspannungen bereits vor dem Balustraden- Umlenkbogen 13 auf das Niveau der durch die Handlaufspannvorrichtung 7 vorhandene Zugspannung reduziert wird. Dadurch wird der Verschleiß am Handlauf 35 und an den nicht dargestellten Handlaufführungsmittel drastisch reduziert und die Lebensdauer des Handlaufs 35 sowie der Energiekonsum der Fahrtreppe während des Betriebes wesentlich reduziert. - Allerdings besteht auch ein Erfordernis an die Ästhetik der Balustrade, insbesondere an eine Glasbalustrade, wie sie bei Fahrtreppen und Fahrsteigen für Kaufhäuser und Flughäfen üblicherweise verwendet wird. Dadurch kann nur ein Handlauf-Antriebsystem 30 mit Antriebselementen 36 eingesetzt werden, die deutlich geringere Dimensionen aufweisen, als die Antriebselemente 6 des in der
Figur 1 dargestellten Handlauf-Antriebsystems 20. - Die
Figur 4 zeigt als erstes Ausführungsbeispiel der Erfindung einen Abschnitt einer Glasbalustrade 3 einer nur teilweise dargestellten Fahrtreppe 1 oder eines Fahrsteiges 1 mit einem Handlauf-Antriebssystem 30. Dessen Handlaufantrieb 37 mit seinen Antriebselementen 36 ist gemäss derFigur 3 an einer idealen Position in unmittelbarer Nähe zum Handlauf 35 in der Glasbalustrade 3 angeordnet. - Die
Figur 5 zeigt in dreidimensionaler, größerer Ansicht Details des in derFigur 4 dargestellten Handlauf-Antriebssystems 30. Das Handlauf-Antriebssystem 30 weist einen Handlaufantrieb 37 sowie einen umlaufenden Handlauf 35 auf, von dem in derFigur 5 nur ein Abschnitt dargestellt ist. Der Handlaufantrieb 37 umfasst im Wesentlichen Antriebselemente 36, einen Motor 38 und ein Winkelgetriebe 39. Um den Aufbau und das Zusammenwirken des Handlaufs 35 mit den Antriebselementen 36 besser zu zeigen, ist der Handlauf 35 zudem teilweise transparent dargestellt, jedoch wurde aus Gründen der Übersichtlichkeit auf eine Darstellung von eingebetteten Gleitelementen und Zugträgern verzichtet. - Der Motor 38 und das Winkelgetriebe 39 sind in der Glasbalustrade 3 integriert, wobei deren Gehäuse mittels entsprechender Flanschansätze 41 an einer Glaspaneele 40 der Glasbalustrade 3 befestigt sind. Der Motor 38 ist über elektrische Leitungen 54 beispielsweise mit der in der
Figur 1 dargestellten Handlaufsteuerung 23 verbunden. Des Weiteren weisen die Gehäuse Anschlussstellen für Handlaufführungsmittel 42, 43 beziehungsweise Handlaufführungsprofile 42, 43 auf. Die Antriebselemente 36 umfassen einen Zahnriemen 45, ein Riemenzahnrad 46, Übertragungszahnräder 47, Stützzahnräder 48 sowie ein Riemenspannrad 49. Das Winkelgetriebe 39 weist eine Ausgangswelle 50 auf, welche mit dem Riemenzahnrad 46 verbunden ist. Der Zahnriemen 45 ist um das Riemenzahnrad 46 und das vom Riemenzahnrad 46 beabstandet angeordnete Riemenspannrad 49 umlaufend geführt, welches durch eine Spannfeder 51 den Zahnriemen 45 gespannt hält. Die Stützzahnräder 48, im vorliegenden Ausführungsbeispiel vier Stück, sind in einer horizontalen Ebene zwischen dem ersten Trum 52 und dem zweiten Trum 53 des Zahnriemens 45 angeordnet. In derselben Ebene sind auch die Übertragungszahnräder 47 angeordnet, im vorliegenden Ausführungsbeispiel ebenfalls vier Stück. Die Übertragungszahnräder 47 werden durch das zweite Trum 53 des Zahnriemens 45 angetrieben, wobei der Umlaufsinn des Zahnriemens 45 gegensätzlich zum Drehsinn der Übertragungszahnräder 47 ist. - Der Handlauf 35 ist durch eine als Grifffläche ausgestaltete Außenkontur 61 und durch eine im Handlauf 35 eine Kavität 60 aussparende Innenkontur 62 begrenzt. Die Kavität 60 ist zur Umgebung des Handlaufes 35 offen, so dass dieser einen C-förmigen Querschnitt 70 aufweist. An der Innenkontur 62 sind zwei einander gegenüberliegend angeordneten Seitenflächen 63, 64 vorhanden. Die beiden Seitenflächen 63, 64 weisen jeweils ein Zahnprofil auf, das sich in der Längserstreckung L des Handlaufs 35 erstreckt und denselben Zahnprofilmodul aufweist, wie der Zahnriemen 45 und die Übertragungszahnräder 47. Ferner sind an der Innenkontur 62 Führungselemente 44 ausgebildet, die auf die Handlaufführungsmittel 42, 43 abgestimmt sind.
- Die Treibkraft wird von den Antriebselementen 36 auf den Handlauf 35 an den zwei einander gegenüberliegend angeordneten Seitenflächen 63, 64 der Innenkontur 62 übertragen. Zur Übertragung der Treibkraft ist der Zahnriemen 45 mit seinem ersten Trum 52 mit der ersten gegenüberliegenden Seitenfläche 63 der Innenkontur 62 in Eingriff und die Übertragungszahnräder 47 mit der zweiten gegenüberliegenden Seitenfläche 64 in Eingriff.
- Durch eine komplementäre Ausgestaltung der Seitenflächen 63, 64 werden alle weiteren, durch die Übertragung der Treibkraft erforderlichen und/oder verursachten, zwischen den Seitenflächen 63, 64 wirkenden Kräfte P1, P2, P3, P4 gegenseitig kompensiert. Das heißt, dass unter einer komplementären Ausgestaltung der Seitenflächen 63, 64 eine Ausgestaltung zu verstehen ist, die alle zwischen den im Bereich der Treibkraftübertragung an Seitenflächen 63, 64 wirkenden Kräfte P1, P2, P3, P4 mit Ausnahme der Treibkraft gegenseitig kompensiert, so dass keine zusätzlichen Bauteile wie beispielsweise die im Stand der Technik bekannten Andruckrollen erforderlich sind. Vorzugsweise sind die beiden komplementär ausgestalteten Seitenflächen 63, 64 spiegelsymmetrisch zueinander ausgebildet. Dies können bei einem betriebsbereit umlaufend angeordneten Handlauf 35 beispielsweise in zwei zueinander parallelen, vertikalen Ebenen angeordnete Seitenflächen 63, 64 sein, die gegenseitig die zur Übertragung der Treibkraft notwendige Kraft P1, P2 beziehungsweise Anpresskraft oder wie im vorliegenden Beispiel durch Zahnflanken verursachte Kräfte P1, P2, P3, P4 abstützen. Vorzugsweise ist der Querschnitt 70 des Handlaufs 35 bezüglich der an den Seitenflächen 63, 64 wirkenden Kräfte P1, P2 ausreichend deformationsstabil ausgestaltet, so dass diese den C-förmigen Querschnitt 70 nicht spreizen.
- Die
Figur 6 zeigt schematisch ein zweites Ausführungsbeispiel einer Glasbalustrade 3 einer Fahrtreppe 1 oder eines Fahrsteiges mit einem Handlauf-Antriebssystem 80, das sinngemäß derFigur 3 an einer idealen Position angeordnet ist. Das Handlauf-Antriebssystem 80 umfasst einen Handlauf 35 sowie in der Glasbalustrade 3 integrierte Antriebselemente 86, wobei der Handlauf 35 durch die in derFigur 1 dargestellte - Antriebsanordnung 25 des Fahrsteiges oder der Fahrtreppe 1 angetrieben wird.
- Die
Figur 7 zeigt den in derFigur 6 angegebenen Schnitt A-A in vergrößerter Darstellung mit einem Teil der im Handlauf 35 angeordneten Antriebselemente 86 des in derFigur 6 dargestellten Handlauf-Antriebssystems 80. -
Figur 8 zeigt den in derFigur 6 angegebenen Schnitt B-B in vergrößerter Darstellung des in denFiguren 6 und 7 dargestellten Handlauf-Antriebssystems 80. - Nachfolgend werden die
Figuren 6 bis 8 gemeinsam beschrieben wobei auch bei diesen Figuren aus Gründen der Übersichtlichkeit, auf eine Darstellung von eingebetteten Gleitelementen und Zugträgern verzichtet wird. Dadurch, dass der Handlauf 35 durch die mit unterbrochener Linie skizzenhaft dargestellte Antriebsanordnung 25 angetrieben wird, muss eine mechanische Verbindung zwischen den Antriebselementen 86 und der Antriebsanordnung 25 bestehen. Hierbei ist ein Zahnriemen 85 der Antriebselemente 86 umlaufend zwischen der Antriebsanordnung 25 und weiteren Antriebselementen 86 angeordnet. Damit der Zahnriemen 85 in verschiedene Richtungen gebogen werden kann, sind seine Zähne einer Perlenkette ähnlich, rotationssymmetrisch zur Mittellängsachse des Zahnriemens 85 ausgestaltet. Die weiteren Antriebselemente 86 umfassen Übertragungszahnräder 87, die in zwei Reihen 88, 89 in einer horizontalen Ebene in einem Handlaufführungsmittel 90 beziehungsweise Handlaufführungsprofil 90 der Glasbalustrade 3 angeordnet sind. Da der Zahnriemen 85 zwischen den beiden Reihen 88, 89 durchgeführt ist, weisen die Übertragungszahnräder 87 der beiden Reihen einen gegenläufigen Drehsinn auf. Die Übertragungszahnräder 87 übertragen die Treibkraft des Zahnriemens 85 formschlüssig auf die beiden Seitenflächen 63, 64 des Handlaufs 35. Das Handlaufführungsmittel 90 ist beispielsweise durch mehrere Abkantungen aus einem Blechstreifen gefertigt und ist mit seiner Unterseite 91 auf ein Glaspaneel 92 der Glasbalustrade 3 aufsteckbar. An seiner Oberseite 93 sind die Achsen 94 der Übertragungszahnräder 87 befestigt sowie Führungselemente 95 ausgebildet. - Die
Figuren 9 und 10 zeigen in geschnittener Darstellung einen Abschnitt einer möglichen Ausgestaltung eines Handlaufs 105 mit sowie dessen Querschnitt. Der Handlauf 105 beziehungsweise Handlaufriemen ist üblicherweise über seine Längserstreckung L gleichbleibend aus einem weichelastischen Elastomermaterial 107 wie SBR (Styrol-Butadien Kautschuk), EPM (Ethylen-Propylen-Kautschuk), EPDM (Ethylen-Propylen-Terpolymere-Kautschuk), NBR (Acrylnitril-Butadien-Kautschuk) und dergleichen mehr gefertigt, wobei zur Verstärkung Zugträger 108 wie beispielsweise Stahldrahtlitzen, Kohlefasern oder Aramidfaserlitzen im Elastomermaterial 107 eingebettet sind. - Des Weiteren sind im Elastomermaterial 107 des Handlaufs 105 Gleitelemente 106 teilweise eingebettet, welche härter sind als das weichelastische Elastomermaterial 107. Die Gleitelemente 106 können aus einem hartelastischen Polymerwerkstoff oder einem Buntmetall gefertigt sein, die zu anderen Materialien wie Stahl einen geringen Reibungskoeffizienten aufweisen. Solche Materialien können beispielsweise PTFE (Polytetrafluoräthylen), POM (Polyoxymethylen), Messing oder Bronze und dergleichen mehr sein.
- Die härteren Gleitelemente 106 sind abschnittsweise in diskreten Abständen entlang der Längserstreckung L des Handlaufs 105 angeordnet. Der derart ausgebildete Handlauf 105 beziehungsweise Handlaufriemen weist einen Wirbelsäule-ähnlichen Aufbau auf, so dass dieser über seine Längserstreckung L alternierend hart- und weichelastische Bereiche aufweist. Dadurch lässt sich der Handlauf 105 problemlos biegen und hochbeanspruchte Bereiche wie Gleitflächen 113 und/oder Führungsnuten lassen sich an den Gleitelementen 106 ausbilden. Im vorliegenden Ausführungsbeispiel sind die Gleitelemente 106 mit als Nuten ausgebildeten Führungselementen 109 versehen. Die Führungselemente 109 sind in betriebsbereitem Zustand in Interaktion mit an einer Balustrade 3 der Fahrtreppe 1 oder des Fahrsteiges stationär angeordneten Handlaufführungsmitteln wie beispielsweise das in der
Figur 8 dargestellte Handlaufführungsprofil 90. Des Weiteren sind an den Gleitelementen 106 auch die beiden zur Treibkraftübertragung vorgesehenen Seitenflächen 110, 111 ausgebildet. Zur sicheren Kraftübertragung sind an den Seitenflächen 110, 111 auf die nicht dargestellten Antriebselemente abgestimmte Zahnprofile 112 beziehungsweise Zahnprofilabschnitte 112 ausgebildet. - Um die Formstabilität des Handlaufs 105 auch in seiner Längserstreckung L zu erhalten, sind die Gleitelemente 106 mit den im weichelastischen Elastomermaterial 107 eingebetteten Zugträger 108 fest verbunden.
- Die
Figur 11 zeigt in geschnittener Darstellung einen Abschnitt einer weiteren möglichen Ausgestaltung eines Handlauf- Antriebssystems 120, welches einen Handlauf 125 und Antriebselemente 126 umfasst. DieFigur 12 zeigt den in derFigur 11 angegebenen Querschnitt des Handlauf-Antriebsystems 120. - Bei den vorangehend beschriebenen Ausführungsbeispielen der
Figuren 4 bis 12 sind die beiden Seitenflächen 63, 64, 110, 111 des Handlaufs 35, 105 an den zwei einander gegenüberliegenden Seiten der Innenkontur 62 der beiden Schenkel des U-förmig oder C-förmig ausgestalteten Querschnitts angeordnet. - Wie das Ausführungsbeispiel der
Figuren 11 und 12 zeigt, ist auch ein Handlauf-Antriebsystem 120 mit einem Handlauf 125 möglich, dessen Innenkontur 122 ein sich in der Längserstreckung L des Handlaufs 125 erstreckender Mittelsteg 121 aufweist, an dem die beiden Seitenflächen 123, 124 an den zwei einander gegenüberliegenden Seiten des Mittelsteges 121 beziehungsweise der Innenkontur 122 ausgebildet sind. Die Seitenflächen 123, 124 müssen nicht zwingend ebene, vertikale Flächen sein. Sie können auch konkav, konvex oder prismenförmig ausgebildet sein, sofern sie die weiter oben spezifizierte, komplementäre Ausgestaltung aufweisen. Des Weiteren sind im Elastomermaterial des Handlaufs 125 Zugträger 128 eingebettet und an der Innenkontur 122 in der Längserstreckung L des Handlaufs als Nuten ausgebildete Führungselemente 129 angeordnet. - Um die Traktion zwischen den Antriebselementen 126 des Handlauf-Antriebsystems 120 und dem umlaufend angeordneten Handlauf 125 zu verbessern, ist eine formschlüssige Übertragung der Treibkraft vorgesehen, so dass an den zwei einander gegenüberliegenden Seiten der Innenkontur 122 Zahnprofile 127 ausgebildet sind, an die die Treibkraft übertragbar ist.
- Die Antriebselemente 126 umfassen sechs Übertragungszahnräder 131, die paarweise angeordnet sind, wobei zwischen den einzelnen Zahnradpaaren der Mittelsteg 121 durchgeführt ist, so dass die Verzahnung der Übertragungszahnräder 131 in die Zahnprofile 127 des Handlaufs 125 eingreifen. Die übrigen Bauteile der Antriebselemente 126 wie Motor und Getriebeteile, durch welche die Übertragungszahnräder 131 angetrieben werden, sind mit diesen als Handlaufantrieb 130 vereint in einem Antriebsgehäuse 138 untergebracht und deshalb nicht einsehbar. Am Antriebsgehäuse 138 sind Handlaufführungsmittel 132 und Flanschansätze 133 ausgebildet. Mit den Flanschansätzen 133 kann das Antriebsgehäuse 138 an einer Glaspaneele 92 der Glasbalustrade 3 befestigt werden. Hierdurch wird eine feste Basis für die Handlaufführungsmittel 132 geschaffen, an denen die Führungselemente 129 des Handlaufs 125 geführt sind. Das Antriebsgehäuse 138 kann ferner Anschlussstellen 135 zu nicht dargestellten Handlauffährungsmitteln der Balustrade 3 aufweisen. Der im Antriebsgehäuse 138 angeordnete Motor ist über elektrische Leitungen 134 beispielsweise mit der in der
Figur 1 dargestellten Handlaufsteuerung 23 verbunden. Selbstverständlich kann die Handlaufsteuerung 23 auch im Antriebsgehäuse 138 integriert sein. - Obwohl die Erfindung durch die Darstellung spezifischer Ausführungsbeispiele beschrieben worden ist, ist es offensichtlich, dass zahlreiche weitere Ausführungsvarianten in Kenntnis der vorliegenden Erfindung geschaffen werden können, beispielsweise indem die Merkmale der einzelnen Ausführungsbeispiele miteinander kombiniert und/oder einzelne Funktionseinheiten der Ausführungsbeispiele ausgetauscht werden. Beispielsweise kann der in den
Figuren 11 und 12 dargestellte Handlauf 125 auch Gleitelemente aufweisen, wie sie der in denFiguren 9 und 10 dargestellte Handlauf 105 aufweist, wobei der Mittelsteg 121 dann entweder an den Gleitelementen oder am weichelastischen Elastomermaterial ausgebildet ist. Aus Gründen der besseren Übersicht wurde in denFiguren 1 bis 4 und6 weitgehend auf eine Darstellung von Signalübertragungsmittel, Stromversorgungsleitungen und dergleichen verzichtet. Diese müssen aber zwangsläufig vorhanden sein, damit die Fahrtreppe 1 oder der Fahrsteig 1 mit dem erfindungsgemässen Handlauf- Antriebssystem 30, 80, 120 störungsfrei einsetzbar ist. Demzufolge werden entsprechend ausgestaltete Fahrtreppen 1 vom Schutzumfang der vorliegenden Ansprüche umfasst. - Abschließend ist darauf hinzuweisen, dass Begriffe wie "aufweisend", "umfassend", etc. keine anderen Elemente oder Schritte ausschließen und Begriffe wie "eine" oder "ein" keine Vielzahl ausschließen. Bezugszeichen in den Ansprüchen sind nicht als Einschränkung anzusehen.
Claims (13)
- Handlauf- Antriebssystem (30, 80, 120) einer Fahrtreppe oder eines Fahrsteiges, aufweisend:• einen Handlaufantrieb (37, 130) mit Antriebselementen (36, 86, 126) und• einen bandförmig ausgebildeten, umlaufend bewegbaren Handlauf (35, 125), wobei der Handlauf (35, 125) durch eine als Grifffläche ausgestaltete Außenkontur (61) und durch eine im Handlauf (35, 125) eine Kavität (60) aussparende Innenkontur (62, 122) begrenzt ist und wobei die Kavität (60) zur Umgebung des Handlaufes (35, 125) offen ist, wobeidie Treibkraft von den Antriebselementen (36, 86, 126) auf den Handlauf (35, 125) an zwei einander gegenüberliegend angeordneten Seitenflächen (63, 64, 110, 111, 123, 124) der Innenkontur (62, 122) übertragbar ist, wobei durch eine komplementäre Ausgestaltung der Seitenflächen (63, 64, 110, 111, 123, 124) mit Ausnahme der Treibkraft alle weiteren, durch die Übertragung der Treibkraft verursachten und an den Seitenflächen (63, 64, 110, 111, 123, 124) wirkenden Kräfte gegenseitig kompensiert sind, dadurch gekennzeichnet, dass der Handlauf (35, 125) aus einem weichelastischen Elastomermaterial (107) gefertigt ist und Gleitelemente (106) aufweist, die aus einem Polymermaterial gefertigt sind, welches härter ist als das weichelastische Elastomermaterial (107), wobei die Gleitelemente (106) abschnittsweise in diskreten Abständen entlang der Längserstreckung (L) des Handlaufs (35, 125) angeordnet sind und Führungselemente (44, 109, 129) und/oder Zahnprofile (112, 127) an den Gleitelementen (106) ausgebildet sind.
- Handlauf- Antriebssystem (30, 80, 120) nach Anspruch 1, wobei der Handlauf (35, 125) entlang seiner Längserstreckung (L) einen U-förmig oder C-förmig ausgestalteten Querschnitt aufweist.
- Handlauf- Antriebssystem (30, 80, 120) nach Anspruch 1 oder 2, wobei an den zwei einander gegenüberliegenden Seitenflächen (63, 64, 110, 111, 123, 124) der Innenkontur (62, 122) Zahnprofile (112, 127) ausgebildet sind, an die die Treibkraft kraftschlüssig und/oder formschlüssig übertragbar ist.
- Handlauf- Antriebssystem (30, 80, 120) nach einem der Ansprüche 1 bis 3, wobei der Handlauf (35, 125) im weichelastischen Elastomermaterial (107) eingebettete Zugträger (108, 128) aufweist und wobei die Gleitelemente (106) mit den Zugträgern (108, 128) verbunden sind.
- Handlauf- Antriebssystem (30, 80, 120) nach einem der Ansprüche 1 bis 4, wobei die Antriebselemente (36, 86, 126) zumindest einen umlaufend bewegbaren Zahnriemen (45, 85) umfassen.
- Handlauf- Antriebssystem (30, 80, 120) nach einem der Ansprüche 1 bis 5, wobei die Antriebselemente (36, 86, 126) zumindest ein Übertragungszahnrad (47, 87, 131) umfassen.
- Handlauf- Antriebssystem (30, 80, 120) nach Anspruch 6, wobei der Zahnriemen (45) mit seinem ersten Trum (52) mit der ersten gegenüberliegenden Seitenfläche (63) der Innenkontur (62, 122) in Eingriff ist und mit seinem zweiten Trum (53) mit dem mindestens ein Übertragungszahnrad (47) in Eingriff ist, wobei der Umlaufsinn des Zahnriemens (45) gegensätzlich zum Drehsinn des Übertragungszahnrads (47) ist und wobei das Übertragungszahnrad (47) mit der zweiten gegenüberliegenden Seitenfläche (64) der Innenkontur (62, 122) in Eingriff ist.
- Handlauf- Antriebssystem (30, 80, 120) nach Anspruch 6, wobei der Zahnriemen (85) zwischen mindestens zwei Übertragungszahnrädern (87) geführt und in Wirkverbindung mit diesen ist, so dass die beiden Übertragungszahnräder (87) einen gegensätzlichen Drehsinn aufweisen und das erste der beiden Übertragungszahnräder (87) mit der ersten gegenüberliegenden Seitenfläche (63) der Innenkontur (62, 122) in Eingriff ist und das zweite der beiden Übertragungszahnräder (87) mit der zweiten gegenüberliegenden Seitenfläche (64) der Innenkontur (62, 122) in Eingriff ist.
- Handlauf- Antriebssystem (30, 80, 120) nach einem der Ansprüche 1 bis 8, wobei mindestens eine Balustrade (3) mit einem Handlaufführungsmittel (42, 43, 90, 132) vorhanden ist und wobei zumindest ein Teil der Antriebselemente (36, 86, 126) im Handlaufführungsmittel (42, 43, 90, 132) integriert sind.
- Handlauf- Antriebssystem (30, 80, 120) nach Anspruch 9, wobei der Zahnriemen (85) vom Handlaufführungsmittel (42, 43, 90, 132) durch die Balustrade (3), durch einen die Balustrade (3) mit einem Tragwerk (2) des Fahrsteiges oder der Fahrtreppe (1) verbindenden Balustradensockel (4) und um ein im Tragwerk (2) angeordnetes Antriebsrad geführt ist.
- Handlauf- Antriebssystem (30, 80, 120) nach Anspruch 9, wobei der Zahnriemen (45) durch ein im Handlaufführungsmittel (42, 43, 90, 132) angeordnetes Winkelgetriebe (39) und einen Motor (38) angetrieben ist.
- Fahrtreppe (1) oder Fahrsteig mit mindestens einem Handlauf-Antriebssystem (30, 80, 120) nach einem der Ansprüche 1 bis 11.
- Fahrtreppe (1) nach Anspruch 12, wobei die Fahrtreppe (1) eine untere Ebene (E1) eines Bauwerkes mit einer oberen Ebene (E2) des Bauwerkes verbindet, wobei durch die umlaufende Anordnung des Handlaufs (35, 125) ein Handlaufvorlauf (14) und ein Handlaufrücklauf (18) vorhanden ist und die Antriebselemente (36, 86, 126) im Vorlauf der oberen Ebene angeordnet sind.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17185725 | 2017-08-10 | ||
| PCT/EP2018/070169 WO2019029992A1 (de) | 2017-08-10 | 2018-07-25 | Handlauf-antriebssystem mit im handlauf integrierten antriebselementen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3665115A1 EP3665115A1 (de) | 2020-06-17 |
| EP3665115B1 true EP3665115B1 (de) | 2021-06-16 |
Family
ID=59581784
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP18745608.2A Active EP3665115B1 (de) | 2017-08-10 | 2018-07-25 | Handlauf-antriebssystem mit im handlauf integrierten antriebselementen |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10875745B2 (de) |
| EP (1) | EP3665115B1 (de) |
| CN (1) | CN110944924B (de) |
| ES (1) | ES2880416T3 (de) |
| WO (1) | WO2019029992A1 (de) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111268544B (zh) * | 2020-03-29 | 2025-04-29 | 中国计量大学上虞高等研究院有限公司 | 一种手扶电梯 |
| CN117677579A (zh) * | 2021-07-19 | 2024-03-08 | 因温特奥股份公司 | 用于自动扶梯或自动人行道的扶手 |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CH517044A (de) * | 1971-02-24 | 1971-12-31 | Inventio Ag | Handlaufantrieb für Fahrtreppen und Personenförderbänder |
| BE794338A (fr) * | 1972-01-24 | 1973-05-16 | Pahl Gummi Asbest | Main courante pour escalier roulant |
| US5259492A (en) * | 1992-12-30 | 1993-11-09 | Otis Elevator Company | Dual belt linear handrail drive |
| JPH07267562A (ja) * | 1994-03-31 | 1995-10-17 | Mitsubishi Denki Bill Techno Service Kk | エスカレーターの移動手摺装置 |
| AU2002229387A1 (en) | 2002-02-06 | 2003-09-02 | Semperit Aktiengesellschaft Holding | Band-shaped traction element and guiding device for the hand rail of an escalator or moving sidewalk |
| JP2004115267A (ja) * | 2002-09-30 | 2004-04-15 | Mitsubishi Electric Building Techno Service Co Ltd | 乗客コンベヤーの移動手摺装置 |
| DE10248327A1 (de) | 2002-10-17 | 2004-05-06 | Kone Corp. | Handlaufantrieb |
| US20050173224A1 (en) | 2004-01-16 | 2005-08-11 | Ronald H. Ball | Positive drive handrail assembly |
| FI20040167A7 (fi) * | 2004-02-03 | 2005-08-04 | Kone Corp | Liukukäytävä, -ramppi tai -porras |
| JP2008540290A (ja) * | 2005-05-05 | 2008-11-20 | オーチス エレベータ カンパニー | 歯付被駆動面に摺動材料を備えた乗客運搬装置用手摺 |
| JP2008540289A (ja) * | 2005-05-05 | 2008-11-20 | オーチス エレベータ カンパニー | 歯付ベルトを備えた手摺用ポジティブリニア駆動装置 |
| JP5258169B2 (ja) | 2005-05-09 | 2013-08-07 | インベンテイオ・アクテイエンゲゼルシヤフト | エスカレータまたは動く歩道のための新規タイプのハンドレール、およびこのようなハンドレールを備えたエスカレータまたは動く歩道 |
| CN201065298Y (zh) | 2007-06-08 | 2008-05-28 | 杨孟雄 | 具动力的扶手装置 |
| CN201777766U (zh) * | 2010-05-19 | 2011-03-30 | 蒂森克虏伯扶梯(中国)有限公司 | 一种扶手带驱动装置 |
| WO2014142891A1 (en) * | 2013-03-14 | 2014-09-18 | Otis Elevator Company | Self-clamping handrail drive |
| CN105016185A (zh) * | 2015-07-07 | 2015-11-04 | 日立电梯(广州)自动扶梯有限公司 | 扶手带驱动系统 |
| AT517610B1 (de) * | 2015-09-17 | 2017-03-15 | Innova Patent Gmbh | Vorrichtung zum Antreiben eines Handlaufes |
-
2018
- 2018-07-25 CN CN201880048745.1A patent/CN110944924B/zh active Active
- 2018-07-25 US US16/634,738 patent/US10875745B2/en active Active
- 2018-07-25 ES ES18745608T patent/ES2880416T3/es active Active
- 2018-07-25 EP EP18745608.2A patent/EP3665115B1/de active Active
- 2018-07-25 WO PCT/EP2018/070169 patent/WO2019029992A1/de not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| CN110944924A (zh) | 2020-03-31 |
| EP3665115A1 (de) | 2020-06-17 |
| WO2019029992A1 (de) | 2019-02-14 |
| ES2880416T3 (es) | 2021-11-24 |
| US10875745B2 (en) | 2020-12-29 |
| US20200207587A1 (en) | 2020-07-02 |
| CN110944924B (zh) | 2021-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3148916B1 (de) | Gelenkkette eines fahrsteiges oder einer fahrtreppe | |
| EP1580156A1 (de) | Aufzug mit riemenartigem Übertragungsmittel, insbesondere mit Keilrippenriemen, als Tragmittel und/oder Treibmittel | |
| EP2471736A1 (de) | Fahrtreppe | |
| EP2928807A1 (de) | Förderkettenrad beziehungsweise umlenkkettenrad mit erhöhter lebensdauer | |
| EP0672013B1 (de) | Antriebs- und führungseinrichtung für stetigförderer | |
| WO2004108581A1 (de) | Handlauf, handlaufführungssystem, sowie handlaufantriebssystem einer fahrtreppe oder eines fahrsteigs | |
| DE10138462B4 (de) | Verfahren zum Führen von Laschenketten im Bereich von Umlenkeinrichtungen einer Personenförderanlage | |
| DE10063844B4 (de) | Antriebssystem für Rolltreppen und Rollsteige | |
| EP3665115B1 (de) | Handlauf-antriebssystem mit im handlauf integrierten antriebselementen | |
| WO2003066500A1 (de) | Bandförmiges zugelement und führungseinrichtung für einen handlauf einer rolltreppe oder eines rollsteiges | |
| EP3414192B1 (de) | Zuführvorrichtung | |
| EP2931645B1 (de) | Vorrichtung zum antreiben eines fahrtreppen- oder fahrsteighandlaufes | |
| DE19525635C2 (de) | Vorrichtung zur Bogenauslage in einer Bogendruckmaschine | |
| AT517610B1 (de) | Vorrichtung zum Antreiben eines Handlaufes | |
| DE20100833U1 (de) | Fahrtreppe oder Fahrsteig | |
| EP3722243B1 (de) | Einlaufschiene für fahrtreppen oder fahrsteige sowie personenfördervorrichtung mit einer solchen einlaufschiene | |
| DE102017217721A1 (de) | Personenfördervorrichtung mit Laufrollen- und Schonrollenführung der Stufenkette sowie Verfahren zum Führen einer Stufenkette mit Laufrollen und Schonrollen | |
| DE102006036353A1 (de) | Fahrtreppe | |
| DE19844304C1 (de) | Kettenförderer für Transportgut | |
| EP3507228B1 (de) | Kettenglied für eine hochbelastbare förderkette eines fahrsteiges, einer fahrtreppe oder eines aufzugs | |
| DE2460423A1 (de) | Gliederhandlauf fuer fahrtreppen oder personenfoerderbaender | |
| EP1344740B1 (de) | Fahrtreppe oder Fahrsteig | |
| DE4300271A1 (de) | Kurvengängiger Kurzbandförderer | |
| DE20301358U1 (de) | Fahrtreppe oder Fahrsteig | |
| EP0776837B1 (de) | Riemenantrieb, insbesondere für einen endlosen Transportgurt eines Fördersystems |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: UNKNOWN |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE INTERNATIONAL PUBLICATION HAS BEEN MADE |
|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20191205 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| DAV | Request for validation of the european patent (deleted) | ||
| DAX | Request for extension of the european patent (deleted) | ||
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20210322 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502018005756 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1402195 Country of ref document: AT Kind code of ref document: T Effective date: 20210715 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210916 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20210616 Ref country code: ES Ref legal event code: FG2A Ref document number: 2880416 Country of ref document: ES Kind code of ref document: T3 Effective date: 20211124 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210916 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210917 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20211018 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502018005756 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20210731 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 |
|
| 26N | No opposition filed |
Effective date: 20220317 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210725 Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210725 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210731 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: TR Payment date: 20220714 Year of fee payment: 5 Ref country code: IT Payment date: 20220725 Year of fee payment: 5 Ref country code: GB Payment date: 20220719 Year of fee payment: 5 Ref country code: ES Payment date: 20220817 Year of fee payment: 5 Ref country code: CZ Payment date: 20220721 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20220725 Year of fee payment: 5 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20220726 Year of fee payment: 5 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20180725 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20230725 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 Ref country code: CZ Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230725 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230731 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230725 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230725 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20240829 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 1402195 Country of ref document: AT Kind code of ref document: T Effective date: 20230725 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20210616 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230726 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230725 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230726 Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20230725 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20250728 Year of fee payment: 8 |