EP3486417A1 - Deckelsteller - Google Patents
Deckelsteller Download PDFInfo
- Publication number
- EP3486417A1 EP3486417A1 EP17202519.9A EP17202519A EP3486417A1 EP 3486417 A1 EP3486417 A1 EP 3486417A1 EP 17202519 A EP17202519 A EP 17202519A EP 3486417 A1 EP3486417 A1 EP 3486417A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- drive
- latching
- cover plate
- actuating arm
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 49
- 125000006850 spacer group Chemical group 0.000 claims description 15
- 238000010168 coupling process Methods 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 3
- 239000002184 metal Substances 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 230000008878 coupling Effects 0.000 description 2
- 238000005859 coupling reaction Methods 0.000 description 2
- 208000010201 Exanthema Diseases 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 238000004026 adhesive bonding Methods 0.000 description 1
- 230000004323 axial length Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000004049 embossing Methods 0.000 description 1
- 201000005884 exanthem Diseases 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000002427 irreversible effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 238000004806 packaging method and process Methods 0.000 description 1
- 206010037844 rash Diseases 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




Classifications
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05F—DEVICES FOR MOVING WINGS INTO OPEN OR CLOSED POSITION; CHECKS FOR WINGS; WING FITTINGS NOT OTHERWISE PROVIDED FOR, CONCERNED WITH THE FUNCTIONING OF THE WING
- E05F1/00—Closers or openers for wings, not otherwise provided for in this subclass
- E05F1/08—Closers or openers for wings, not otherwise provided for in this subclass spring-actuated, e.g. for horizontally sliding wings
- E05F1/10—Closers or openers for wings, not otherwise provided for in this subclass spring-actuated, e.g. for horizontally sliding wings for swinging wings, e.g. counterbalance
- E05F1/1041—Closers or openers for wings, not otherwise provided for in this subclass spring-actuated, e.g. for horizontally sliding wings for swinging wings, e.g. counterbalance with a coil spring perpendicular to the pivot axis
- E05F1/105—Closers or openers for wings, not otherwise provided for in this subclass spring-actuated, e.g. for horizontally sliding wings for swinging wings, e.g. counterbalance with a coil spring perpendicular to the pivot axis with a compression spring
- E05F1/1058—Closers or openers for wings, not otherwise provided for in this subclass spring-actuated, e.g. for horizontally sliding wings for swinging wings, e.g. counterbalance with a coil spring perpendicular to the pivot axis with a compression spring for counterbalancing
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2201/00—Constructional elements; Accessories therefor
- E05Y2201/20—Brakes; Disengaging means; Holders; Stops; Valves; Accessories therefor
- E05Y2201/214—Disengaging means
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2800/00—Details, accessories and auxiliary operations not otherwise provided for
- E05Y2800/69—Permanence of use
- E05Y2800/696—Permanence of use during transport or storage
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05Y—INDEXING SCHEME ASSOCIATED WITH SUBCLASSES E05D AND E05F, RELATING TO CONSTRUCTION ELEMENTS, ELECTRIC CONTROL, POWER SUPPLY, POWER SIGNAL OR TRANSMISSION, USER INTERFACES, MOUNTING OR COUPLING, DETAILS, ACCESSORIES, AUXILIARY OPERATIONS NOT OTHERWISE PROVIDED FOR, APPLICATION THEREOF
- E05Y2900/00—Application of doors, windows, wings or fittings thereof
- E05Y2900/20—Application of doors, windows, wings or fittings thereof for furniture, e.g. cabinets
Definitions
- the invention relates to a cover plate, in particular for driving a lid or a flap of a piece of furniture, comprising: a base body, at least one drive pulley, which is pivotally mounted on the base body about a pivot axis, an actuator which for pivoting the at least one drive pulley to the Pivot axis is supported on the at least one drive pulley, an actuating arm which is pivotally held relative to the at least one drive pulley, and a latching mechanism, wherein in a released state of the latching mechanism of the actuating arm is pivotable relative to the at least one drive pulley and in a latched state of Locking mechanism of the actuating arm is rotatably held on the at least one drive disk.
- lid plate In order to secure the power arm driven by the actuator arm against accidental snatching especially when transporting and assembling pieces of furniture, lid plate with various safety precautions are known.
- Such a cover plate is from the DE 10 2016 100 606 B3 known.
- the cover plate has a two-part actuating arm with a base element and a lever.
- the base element of the actuating arm has a control contour on which an actuator is supported.
- the lever of the actuator arm can be folded down relative to the base element.
- a latching mechanism is provided to fix the lever in at least one locking position on the base member rotatably.
- the cover plate has an actuating arm with a drive disc on which an actuator is supported.
- a locking pin is provided. Only by manually applying a Actuator counteracting force on the actuator arm, the locking pin can be pulled and thus the pivotal movement of the actuator arm are released.
- Object of the present invention is to provide a cover plate of the type mentioned, which is safe to use and easy to manufacture and assemble.
- the object is inventively achieved in a cover plate of the type mentioned above in that the latching mechanism is designed and arranged such that the latching mechanism is transferred from the released state exclusively by a pivoting movement of the actuating arm relative to the at least one drive pulley in the latched state.
- cover plates serve a cover, respectively a flap of a furniture between an open position in which the interior of a body limited space is accessible from the outside, and a closed position in which the interior of the body through the lid or the flap is closed, to move.
- the actuator arm is acted upon by the actuator with force to apply over a larger Schwenkweg Scheme the lid towards the open position with force. Thereby, the lid can be held in any position or automatically transferred to the open position.
- a reverse torque is exerted on the actuator arm in the rule, so that there is a tightening force that holds the lid in the closed position.
- Federkraftwovene or gas springs are often used as an actuator, which act via a mechanism, for example via a roller which is supported for example against a control contour of the at least one drive pulley, the actuating arm with force.
- a mechanism for example via a roller which is supported for example against a control contour of the at least one drive pulley, the actuating arm with force.
- the counterweight is missing, which is why the force-loaded actuator arm can rash. This is an accident risk, especially in the production, packaging, transport and installation of the cover plate.
- the at least one drive disk is shortened to “the drive disk”, whereby despite the use of the singular number, several of the drive disk can also be meant. Only if it is accurate the one drive pulley or two or more drive pulleys to arrive, will be noted in the description accordingly.
- an advantage of the solution according to the invention is that the actuating arm can be connected in a simple manner with the drive disk rotatably.
- the usual pivoting of the actuator arm in the normal operation of the cover plate is preferably traced by pivoting the actuating arm relative to the drive pulley manually.
- the latching mechanism is transferred from the released state by an exclusive pivoting movement of the actuating arm relative to the drive pulley and thus without translational movement of the actuating arm relative to the drive pulley in the latched state.
- either only the actuating arm can be moved in the direction of the drive pulley, or the drive pulley can be moved in the direction of the actuating arm, or the components, namely actuator arm and drive pulley, can be moved towards each other.
- the latched state of the actuator arm and the drive pulley are pivotable about the pivot axis in both pivot directions together.
- the power flow between the actuator and the actuator arm is interrupted, so that unintentional lurching of the actuator arm is reliably prevented.
- the actuator can only rotate the drive pulley.
- the actuator arm Only when the actuator arm is coupled to the drive pulley, respectively locked, the actuator arm is drivingly connected by means of the rotationally fixed latching connection with the drive pulley with the actuator.
- the latching is expediently carried out only during assembly, for example, together with a lid attached to the actuating arm, respectively flap, so that the actuating arm can be pivoted together with the lid from the closed position to the open position.
- the cover plate is already operated with the first return transfer of the lid from the open position back to the closed position in normal operation.
- the latching mechanism has at least one latching pair which cooperates in the latched state and consists of a latching projection and a latching recess.
- the locking mechanism may also have a plurality of locking pairs, each having a latching projection and each having an associated latching recess.
- the respective latching projection engages in the respectively assigned latching recess in particular in a form-fitting manner.
- the respective latching projection and the respective associated latching recess in the released state are disengaged.
- the at least one latching projection can be, for example, a curvature produced by embossing.
- the at least one latching recess may be designed as a material recess extending through the entire axial extension of the drive disk or the actuator arm or in the form of a recess or the like closed on the bottom side.
- the at least one latching projection and the at least one associated latching recess can be arranged distributed on the actuating arm and the at least one drive pulley.
- the latching projection can be arranged on the actuating arm or on the single drive disk or on only one of the drive disks and the latching recess can be arranged correspondingly on the counterpart component, that is to say drive disk or actuating arm.
- the at least one latching pair or the respective latching projection and the respectively associated latching recess are associated with each other such that the latching mechanism is transferred from the released state exclusively by a pivoting movement of the actuating arm relative to the at least one drive pulley in the latched state.
- the latching connection is expediently designed such that the forces normally acting on the cover plate during operation do not lead to a decoupling of the latched components, namely actuator arm and drive plate.
- the shearing force usually acting on the respective latching element, for example on the latching projection, of the latching mechanism is approximately 400 Newton.
- the latching connection can also be an irreversible latching connection, so that a decoupling or release of the latched components would be possible only by destroying the latching connection.
- the cover plate can have two drive disks.
- This provides a stable lid plate.
- the actuator arm is arranged between the two drive disks.
- the locking mechanism can be distributed over both drive pulleys and the intermediate actuator arm, whereby a more stable latching connection can be provided.
- a further advantage is that the axial spacing of the two drive discs results in a larger support surface on which the actuator can be supported.
- the respective drive pulley may be formed of sheet metal, which sometimes has only a thin sheet thickness.
- the support surface preferably extends parallel to the pivot axis and can form a control contour on which the actuator is supported.
- the two drive disks can be identical.
- the drive disks can also be configured differently, wherein in particular only one of the drive disks can have a setting contour. Then the further drive pulley would only serve to support the actuator arm and contribute to further stabilization of the connection between the actuator arm and the drive pulleys in the latched state.
- the two drive disks can be connected to each other by a sleeve.
- the sleeve may be arranged concentrically to the pivot axis. In this way, the two drive disks rotatably connected to each other and be pivotally mounted about the pivot axis.
- the two drive disks and the sleeve may have an interference fit with each other. It is also possible that the sleeve is firmly formed on the drive pulleys or connected to the drive pulley, in particular by soldering or gluing is connected.
- the cover plate may have a hinge element which forms the pivot axis and on which the drive plate may be pivotally mounted.
- the joint element may be formed, for example, bolt or pin-shaped.
- the joint element can be arranged or formed on a base body of the cover plate.
- the main body may be, for example, a housing that can be mounted on a side wall of a body of the furniture.
- the sleeve via which the drive disks are connected to one another, can be pushed onto the joint element.
- the actuating arm can be pivoted together with the drive disk about the same pivot axis, respectively stored.
- the actuator arm in the released state can be pivotable relative to the drive pulley about the common pivot axis.
- the actuator arm can be pivotally supported on the base body.
- the actuating arm can have a receiving bore, through which, for example, the joint element arranged on the main body extends.
- the sleeve which rotatably connects the two drive disks, extends through the receiving bore of the actuating arm, which can be arranged between the two drive disks.
- the actuator arm and the sleeve may have a clearance fit to each other.
- the individual components actuator arm and drive disks form a structural unit which can be mounted in a manner which is easy to manufacture, in particular pivotably on the hinge element of the lid actuator.
- the latching projection and the associated latching recess of the at least one latching pair are arranged on a common circular ring cutout about the pivot axis.
- the drive pulley can be made particularly compact.
- the drive pulley can be housed completely within a space enclosed by a housing of the Deckelstellers interior of the Deckelstellers and does not protrude from the housing. As a result, the risk of accidents is reduced by the power-driven drive pulley always.
- the actuating arm can be held on the at least one drive disk.
- the actuating arm can be pivotable about a further pivot axis, wherein the further pivot axis is radially spaced from the pivot axis about which the drive disk is pivotable.
- the actuating arm pivots in the released state relative to the drive pulley about the further pivot axis.
- the latching projection and the associated latching recess of the at least one latching pair are arranged on a common circular ring cutout around the further pivot axis.
- the locking mechanism in principle, several of the locking pairs, in particular two, three, four, five, six locking pairs can have. This provides a stable connection between the actuator arm and the drive pulley in the latched state.
- the respective locking pairs may also have different radial distances from one another relative to the associated pivot axis, or subsets, for example a first subset of the locking pairs and a second subset of the locking pairs, may have different radial distances from the associated pivot axis.
- the drive disks can each have at least one of the latching recesses and the actuating arm arranged between the two drive disks at least two of the latching projections.
- the latching projections are preferably arranged outside the drive pulleys, that is to say in an area which is not overlapped by the drive pulleys.
- the locking projections are then moved only by the pivoting movement of the actuating arm between the drive pulleys and lock there with the designed in the drive pulleys locking recesses.
- at least one spacer can be arranged between the two drive disks.
- the two drive disks can be made axially elastic and can be pressed axially elastically apart in the released state by the at least one spacer.
- the at least one spacer can sit in the at least one latching recess.
- the at least one spacer can be inserted in two mutually axially opposite latching recesses of the two spaced-apart drive pulleys. If the actuating arm is pivoted for latching with the drive disks, in particular in the direction of the open position, one end face of the actuating arm can push away the at least one spacer and thus release the latching recesses for the subsequent latching projections. This improves the latching action, since when overlapping the at least one latching projection with the associated latching recess of the latching projection in the latching recess in particular resiliently can engage by the drive pulley and the actuator arm approach each other again.
- the drive pulleys may each comprise at least one of the latching protrusions and the one between the two Drive pulley arranged actuating arm have at least two of the recesses.
- two of the latching projections may be arranged opposite each other in the axial direction and axially press the two axially elastic drive disks apart in the released state.
- the force required for the pivotal movement of the actuating arm can also be reduced because the locking projections take over an additional function as a spacer in the released state.
- this improves the locking effect, since when overlapping the at least one latching projection with the associated latching recess of the latching projection in the latching recess can engage in particular resiliently by the drive pulley and the actuator arm approach each other again.
- the at least one latching projection may have an inclined sliding surface. If the at least one latching projection is associated with the drive disk, the sliding surface may be formed on a side of the respective latching projection facing the actuating arm in the released state. If the at least one latching projection is associated with the actuating arm, the sliding surface may be formed on a side of the respective latching projection facing in the released state of the drive disk. As a result, the coupling process between the actuator arm and the drive pulley is simplified.
- an end stop may be present.
- an end stop can be arranged on the drive disk, which limits the pivoting movement of the actuating arm relative to the drive disk.
- the latching mechanism locks only in the open position of the Deckelstellers.
- the actuator arm can not unintentionally continue to shoot up by the actuator, thereby still more secure mounting is possible.
- only the actuating arm is moved to take the latched state and the drive pulley stands still during the coupling process.
- the drive pulley is this already before locking in the open position.
- the drive pulley has a setting contour which extends from a starting point on which the actuator is supported when the lid plate is in the closed position to an end point on which the actuator is supported when the lid plate is in the open position ,
- the drive pulley as well Cams are called.
- the actuator In the released state, the actuator can thus be supported at the end of the control contour, so that the drive pulley can not be pivoted during the coupling process with the actuator arm.
- the coupling process is simplified because the drive pulley is pressed by the actuator in the open position and a manual setting of the drive pulley is not necessary.
- FIGS. 1 to 6 show the lid plate 1 according to a first embodiment of the present invention.
- the cover plate 1 is used in a conventional manner to position a furniture flap or lid, not shown, between an open position in which the furniture flap is opened, respectively pivoted upwards, and a closed position in which the furniture flap is closed, respectively pivoted down and closes a furniture body, not shown.
- a furniture flap or lid not shown
- the cover plate 1 has a base body 2 in the form of a housing which can be attached to a side wall of the furniture body.
- base body 2 On the base body 2, two drive pulleys 3 and arranged between the two drive pulleys 3 actuating arm 4 are pivotally mounted about a common pivot axis X.
- the cover plate 1 on an actuator 5, which is fixed to the base body 2 and is supported on the two drive pulleys 3.
- actuator 5 for this purpose, 3 control contours 6 are formed on the two axially spaced-apart drive pulleys, wherein a roller 7 of the actuator 5 runs on the control contours 6.
- the actuator 5, for example, have a spring assembly, in particular with a gas spring.
- the drive disks 3 are formed identically here and may for example be formed from sheet metal, in particular a thin-walled sheet metal, in particular punched. In the FIGS. 1, 2 and 5 It can be seen that the drive disks 3 have a compact, at least approximately diamond-shaped basic shape.
- the drive pulleys 3, viewed in plan view of the respective drive pulley 3, are pivotably mounted on the base body 2 in a corner region and do not protrude from the base body 2 regardless of their rotational position. This compact design is possible because the drive disks 3 and the actuator arm 4 are pivotable about the common pivot axis X.
- a joint element 8 is arranged on the base body 2.
- the joint element 8 is cylindrical, or pin-shaped, and forms the pivot axis X.
- the drive pulleys 3 each have a joint portion 9 held on the joint element 8, each having a holding bore 10.
- a sleeve 11 is pressed, so that the drive disks 3 are rotatably connected to each other.
- the actuating arm 4 has a joint portion 12 which is held on the joint element 8 and which has a receiving bore 13 designed concentrically with the sleeve 11.
- the actuating arm 4 is pushed onto the sleeve 11 between the two drive disks 3, wherein the sleeve 11 engages through the receiving bore 13.
- the actuator arm 4 and the sleeve 11 have a clearance fit to each other, so that the actuating arm 4 and the drive disks 3 are pivotable relative to each other.
- the individual components actuator arm 4 and drive disks 3 form a common structural unit, wherein the drive pulleys 3, in particular the hinge portions 9 of the drive pulleys 3, and the actuator arm 4, in particular the hinge portion 12 of the actuator arm 4, lie on different planes along the pivot axis X.
- the sleeve 11 is arranged concentrically to the joint element 8 and pushed onto this, so that the actuating arm 4 and the drive pulleys 3 are pivotally mounted about the pivot axis X.
- the cover plate 1 has a latching mechanism 24 for the rotationally fixed connection of the actuator arm 4 with the drive pulleys 3.
- the locking mechanism 24 is shown in a released state in which the actuating arm 4 is released from the two drive pulleys 3, respectively decoupled.
- the actuating arm 4 and the two drive disks 3 are then pivotable relative to each other on the common pivot axis X.
- the power flow between the actuator arm 4 and the actuator 5 is interrupted, so that in the released state of the actuator arm 4 is de-energized.
- the latching mechanism 24 is shown in a latched state in which the actuating arm 4 is held against rotation on the drive disks 3.
- the actuator arm 4 and the drive pulleys 3 are pivotable about the pivot axis X together, in both directions of rotation about the pivot axis X.
- the latching mechanism 24 is designed and arranged such that the latching mechanism 24 is transferred from the released state exclusively by a pivoting movement of the actuating arm 4 about the pivot axis X relative to the drive pulleys 3 in the latched state.
- the latching mechanism 24 here four latching pairs, each with a latching projection 14 and an associated latching recess 15.
- the here four locking projections 14 are formed at the ends of two pin-shaped elements 16, which are pressed into holes in the actuating arm 4 and project beyond the actuating arm 4 axially.
- the four locking recesses 15 are designed as four through holes in the drive pulleys 3.
- FIG. 4 is one of the two pin-shaped elements 16 shown here as a single component.
- the pin-shaped elements 16 have a cylindrical basic shape with two conical ends 17 for the formation of oblique sliding surfaces.
- the smallest outer diameter of the ends 17 corresponds at least approximately to the inner diameter of the latching recess 15, which are designed circular in cross-section.
- Each of the drive pulleys 3 has here two of the recesses 15, which are arranged in pairs in alignment in the axial direction one above the other.
- the latching state in axially opposite locking pairs lie on a common circular ring cutout R1, R2, which is known to be limited by an outer ring and an inner ring with the same center.
- the center lies on the pivot axis X.
- the respective circular ring cutout R1, R2 indicated only by a center ring, which lies between the respective outer ring and inner ring.
- the radial distance of the circular ring section R1, on which two of the latching pairs lie is smaller than the radial distance of the further annular section R2, on which the other two latching pairs lie.
- the axial distance between the drive pulleys 3 corresponds at least approximately to the thickness of the actuating arm 4 along the joint section 12.
- the two drive pulleys 3 lie flat against the actuating arm 4.
- the latching projections 14 are outside the drive pulleys 3 and are pushed only by the pivoting movement of the actuating arm 4 between the drive pulleys 3.
- spacers 17 are used between the drive pulleys 3 can, as in the FIG. 2 shown.
- spacers 17 are used between the drive pulleys 3 can, as in the FIG. 2 shown.
- the spacer 17 is shown as a single component which presses the two drive disks 3 axially apart in the released state.
- the spacers 17 are cylindrical and have a central portion 18 with a first diameter and two end formed holding portions 19 each having a reduced diameter compared to the first second diameter.
- the diameter of the holding portions 19 corresponds at least approximately to the inner diameter of the circular recesses 15.
- the axial length of the holding portions 19 corresponds at least approximately to Length of the pin-shaped elements 16.
- the locking projections 14 may be arranged in the released state already in a covered by the drive disks 3 region of the cover plate 1. Then the locking projections 14 can press in the released state against surfaces 23 of the drive pulleys 3 and thus bias them elastically in the axial direction against each other. As soon as the latching projections 14 overlay the respective latching recesses 15, the drive disks 3 approach again, as a result of which the latching projections 14 engage in the latching recesses 15 in a latching manner.
- the actuator arm 4 To the actuator arm 4 from the released state, as in the Figures 1 and 2 shown in the locked state, as in the FIGS. 5 and 6 shown, to relocate, the actuator arm 4 is pivoted in the pivoting direction S relative to the two drive pulleys 3 about the common pivot axis X. In this pivoting operation, the actuating arm 4 is manually rotated to the open position.
- the drive pulleys 3 are stationary during this intended for the coupling pivoting movement, since the drive pulleys 3 are already presented in the released state by the actuator 5 in the open position.
- a cover or a flap can furthermore be mounted on the cover plate 1.
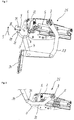
- FIGS. 7 to 14 For example, a lid plate 25 according to a second embodiment of the present invention is shown. Since the basic structure of the cover plate 25 in many parts that according to the FIGS. 1 to 6 For the similarities, reference is made to the above description. The same or corresponding details are provided with the same reference numerals, as in the FIGS. 1 to 6 , In the following, the differences of the present cover plate 25 with respect to the above embodiment will be essentially explained, which are mainly in the pivotable attachment of the actuating arm 4. This cover plate 25 differs essentially by the connection of the actuating arm 4 with the drive pulleys 3 and their latching means of the latching mechanism 24th
- the drive disks 3 have an at least approximately V-shaped basic shape. In plan view of the drive pulleys 3, these are each pivotally mounted on one end of a leg on the base body 2 about the pivot axis X.
- the drive pulleys 3 are also pivotable about the hinge element 8, which is arranged within the base body 2, respectively housing.
- the actuator arm 4 is in turn in the released state of the latching mechanism 24 pivotally mounted about a further pivot axis Y.
- the further pivot axis Y is radially spaced from the pivot axis X of the drive disks 3. Radially spaced here means that the two pivot axes X, Y are at a distance and parallel to each other.
- the actuating arm 4 is arranged between the two drive pulleys 3 and hingedly connected thereto.
- the further pivot axis Y is designed here on a portion of the drive pulleys 3, which lies outside of the main body 2.
- the cover plate 1 In order to drive the actuator arm 4 by means of the actuator 5, the cover plate 1 also has the latching mechanism 24 for the rotationally fixed connection of the actuating arm 4 with the drive pulleys 3.
- the locking mechanism 24 In the FIGS. 7 . 9, 10, 11 and 14 the locking mechanism 24 is shown in a released state in which the actuating arm 4 is released from the two drive pulleys 3, respectively decoupled.
- the actuating arm 4 is in the released state about the further pivot axis Y relative to the drive pulleys 3 pivotally.
- the power flow between the actuator arm 4 and the actuator 5 is interrupted, so that in the released state of the actuator arm 4 is de-energized.
- FIGS. 8 In the FIGS. 8 .
- the latching mechanism 24 is shown in a latched state in which the actuating arm 4 is held against rotation on the drive disks 3. Then, the actuating arm 4 and the drive pulleys 3 are jointly pivotable about the pivot axis X, in both directions of rotation about the pivot axis X.
- the latching mechanism 24 is designed and arranged such that the latching mechanism 24 is transferred from the released state exclusively by a pivoting movement of the actuating arm 4 about the further pivot axis Y relative to the drive pulleys 3 in the latched state.
- the latching mechanism 24 here has two latching pairs, each with a latching projection 26 and an associated latching recess 27.
- the total here two locking projections 26 are formed at the ends of two pin-shaped elements 28, which are pressed into holes in the drive pulleys 3 and protrude respectively in the direction of the opposite drive pulley 3 in the axial direction.
- the two latching recesses 27 are formed by a through the adjusting arm 4 in the axial direction extending through hole, respectively connected to each other.
- the latching projections 26 and the associated latching recesses 27 of the two latching pairs are arranged on a common circular ring cutout R3 about the further pivot axis Y.
- the two pin-shaped elements 28 are arranged one above the other in the axial direction and press in the released state, the two drive disks 3 slightly apart, so that the actuating arm 4 can be pivoted between the drive wheels 3.
- the two latching projections 26 On the side facing the actuating arm 4, the two latching projections 26 have an inclined sliding surface 29.
- the end stop 31 is disposed between the drive pulleys 3 and connected thereto. Then, the locking projections 26 overlap the respective recesses 27, so that the drive discs 3 approach again and the locking projections 26 engage in the latching recesses 27 detent. Thus, the latching mechanism 24 is transferred to the latched state.
- the end stop 31 is located together with the curved leading surface 30 of the actuating arm 4 on a common circular ring cutout R4 about the further pivot axis Y. In the FIG. 10 It can be seen that the radial distance of the circular ring cutout R3, on which the latching pairs lie, is greater than the radial distance of the further annular cutout R4, on which the end stop 31 and the curved leading surface 30 lie.
- the lid plate 25 is shown mounted on a furniture body 32.
- the latching mechanism 24 in the released state and the actuator arm 4 is in a position that would correspond to the closed position in normal operation of the cover plate 25.
- the actuator arm 4 in the open position in the FIG. 13 shown is pivoted manually.
- the drive disks 3, which are already moved into the open position by the actuator 5 stand still, so that only the actuating arm 4 has to be pivoted upwards.
- cover plate 25 here on a control arm 33 which is pivotally mounted about a pivot axis of the pivot axes X, Y radially spaced third pivot axis Z on the base body.
- the control arm 33 and the actuating arm 4 are hingedly connected to a fastener 34 for a cover, not shown, respectively flap.
Landscapes
- Power-Operated Mechanisms For Wings (AREA)
- Lock And Its Accessories (AREA)
- Cabinets, Racks, Or The Like Of Rigid Construction (AREA)
- Transmission Devices (AREA)
Abstract
Description
- Die Erfindung betrifft einen Deckelsteller, insbesondere zum Antrieb eines Deckels oder einer Klappe eines Möbels, der Folgendes aufweist: einen Grundkörper, zumindest eine Antriebsscheibe, die am Grundkörper um eine Schwenkachse schwenkbar befestigt ist, einen Stellantrieb, der zum Schwenken der zumindest einen Antriebsscheibe um die Schwenkachse an der zumindest einen Antriebsscheibe abgestützt ist, einen Stellarm, der relativ zu der zumindest einen Antriebsscheibe schwenkbar gehalten ist, und eine Rastmechanik, wobei in einem freigegebenen Zustand der Rastmechanik der Stellarm relativ zu der zumindest einen Antriebsscheibe schwenkbar ist und in einem verrasteten Zustand der Rastmechanik der Stellarm an der zumindest einen Antriebsscheibe drehfest gehalten ist.
- Um vor allem beim Transport und der Montage von Möbelstücken den durch den Stellantrieb kraftangetriebenen Stellarm gegen ein ungewolltes Vorschnellen zu sichern, sind Deckelsteller mit diversen Sicherheitsvorkehrungen bekannt.
- Ein solcher Deckelsteller ist aus der
DE 10 2016 100 606 B3 bekannt. Der Deckelsteller weist einen zweiteiligen Stellarm mit einem Basiselement und einem Hebel auf. Das Basiselement des Stellarms weist eine Stellkontur auf, an der sich ein Stellantrieb abstützt. Der Hebel des Stellarms kann gegenüber dem Basiselement abgeklappt werden. Weiterhin ist ein Rastmechanismus vorhanden, um den Hebel in zumindest einer Rastposition am Basiselement drehfest zu fixieren. - Aus der
DE 20 2014 103 519 U1 ist ein weiterer Deckelsteller bekannt. Der Deckelsteller weist einen Stellarm mit einer Antriebsscheibe auf, an der sich ein Stellantrieb abstützt. Um die Schwenkbewegung des Stellarms in eine Offenstellung zu beschränken, ist ein Sicherungsstift vorgesehen. Nur durch manuelles Aufbringen einer dem Stellantrieb entgegenwirkenden Kraft auf den Stellarm kann der Sicherungsstift gezogen und damit die Schwenkbewegung des Stellarms freigegeben werden. - Aufgabe der vorliegenden Erfindung ist es, einen Deckelsteller der eingangs genannten Art bereitzustellen, der sicher in der Handhabung und einfach herzustellen und zu montieren ist.
- Die Aufgabe ist erfindungsgemäß bei einem Deckelsteller der eingangs genannten Art dadurch gelöst, dass die Rastmechanik derart ausgebildet und angeordnet ist, dass die Rastmechanik ausgehend von dem freigegebenen Zustand ausschließlich durch eine Schwenkbewegung des Stellarms relativ zu der zumindest einen Antriebsscheibe in den verrasteten Zustand überführt wird.
- Der Erfindung liegt die Überlegung zugrunde, dass Deckelsteller dazu dienen, einen Deckel, respektive eine Klappe eines Möbels zwischen einer Offenstellung, in welcher der von einem Korpus begrenzte Innenraum von außen zugänglich ist, und einer Schließstellung, in der der Innenraum des Korpus durch den Deckel beziehungsweise die Klappe verschlossen ist, zu bewegen. Der Stellarm wird durch den Stellantrieb mit Kraft beaufschlagt, um über einen größeren Schwenkwegbereich den Deckel in Richtung zur Offenstellung mit Kraft zu beaufschlagen. Dadurch kann der Deckel in einer beliebigen Position gehalten oder automatisch in die Offenstellung überführt werden. Über einen kleineren Schwenkwegbereich zwischen einer Zwischenstellung und der Schließstellung wird in der Regel ein umgekehrtes Moment auf den Stellarm ausgeübt, sodass sich eine Anzugskraft ergibt, die den Deckel in der Schließstellung hält. Als Stellantrieb dienen häufig Federkraftpakete oder Gasdruckfedern, die über einen Mechanismus, beispielsweise über eine Rolle, die zum Beispiel gegen eine Stellkontur der zumindest einen Antriebsscheibe abgestützt ist, den Stellarm mit Kraft beaufschlagen. Sobald allerdings kein Deckel am Stellarm montiert ist, fehlt das Gegengewicht, weshalb der kraftbeaufschlagte Stellarm vorschnellen kann. Dies stellt vor allem bei Herstellung, Verpackung, Transport und Montage der Deckelsteller ein Unfallrisiko dar.
- Im Weiteren wird der besseren Lesbarkeit halber "die zumindest eine Antriebsscheibe" verkürzt mit "die Antriebsscheibe" wiedergegeben, wobei trotz Verwendung der Einzahl auch mehrere der Antriebsscheibe gemeint sein können. Nur wenn es auf genau die eine Antriebsscheibe oder zwei oder mehrere Antriebsscheiben ankommen soll, wird in der Beschreibung entsprechend darauf hingewiesen.
- Vorteilhaft bei der erfindungsgemäßen Lösung ist, dass der Stellarm auf einfache Art und Weise mit der Antriebsscheibe drehfest verbunden werden kann. Zur Verrastung des Stellarms mit der Antriebsscheibe wird vorzugsweise der im Normalbetrieb des Deckelstellers übliche Schwenkweg des Stellarms durch Schwenken des Stellarms relativ zur Antriebsscheibe manuell nachgefahren. Mit anderen Worten wird der Rastmechanismus ausgehend vom freigegebenen Zustand durch eine ausschließliche Schwenkbewegung des Stellarms relativ zu der Antriebsscheibe und somit ohne translatorische Bewegung des Stellarms relativ zur Antriebsscheibe in den verrasteten Zustand überführt. Hierzu kann entweder nur der Stellarm in Richtung der Antriebsscheibe bewegt werden, oder die Antriebsscheibe kann in Richtung des Stellarms bewegt werden, oder die Bauteile, nämlich Stellarm und Antriebsscheibe, können aufeinander zu bewegt werden. Im verrasteten Zustand sind der Stellarm und die Antriebsscheibe um die Schwenkachse in beide Schwenkrichtungen gemeinsam schwenkbar. Vor allem zum Transport und noch während der Montage des Deckelstellers am Korpus kann der Stellarm von der Antriebsscheibe entkoppelt, respektive gelöst sein. Dadurch ist der Kraftfluss zwischen dem Stellantrieb und dem Stellarm unterbrochen, sodass ein ungewolltes Vorschnellen des Stellarms sicher verhindert ist. In diesem freigegebenen Zustand kann der Stellantrieb nur die Antriebsscheibe drehen. Erst wenn der Stellarm mit der Antriebsscheibe gekoppelt, respektive verrastet ist, ist der Stellarm mittels der drehfesten Rastverbindung mit der Antriebsscheibe mit dem Stellantrieb antriebsverbunden. Die Verrastung erfolgt zweckmäßigerweise erst bei Montage, beispielsweise zusammen mit einem am Stellarm befestigten Deckel, respektive Klappe, sodass der Stellarm zusammen mit dem Deckel von der Schließstellung in die Offenstellung geschwenkt werden kann. Somit wird der Deckelsteller bereits mit der ersten Rücküberführung des Deckels aus der Offenstellung zurück in die Schließstellung im Normalbetrieb betrieben werden.
- Gemäß einem Aspekt der vorliegenden Erfindung kann vorgesehen sein, dass die Rastmechanik zumindest ein im verrasteten Zustand zusammenwirkendes Rastpaar aufweist, das aus einem Rastvorsprung und einer Rastausnehmung besteht. Die Rastmechanik kann auch mehrere der Rastpaare mit jeweils einem Rastvorsprung und jeweils einer zugeordneten Rastausnehmung aufweisen. Im verrasteten Zustand greift der jeweilige Rastvorsprung in die jeweils zugeordnete Rastausnehmung insbesondere formschlüssig ein. Dagegen sind der jeweilige Rastvorsprung und die jeweilig zugeordnete Rastausnehmung im freigegebenen Zustand außer Eingriff. Durch den Formschluss wird eine Bindung zwischen den beiden Rastelementen, Rastvorsprung und Rastausnehmung, bereitgestellt, die durch die zueinander passenden Formen besonders stabil ist. Somit können auch höhere Drehmomente über die Rastmechanik gut übertragen werden. Der zumindest eine Rastvorsprung kann beispielsweise eine durch Prägung erzeugte Wölbung sein. Die zumindest eine Rastausnehmung kann als eine sich durch die gesamte axiale Erstreckung der Antriebsscheibe oder des Stellarms erstreckende Materialausnehmung oder in Form einer bodenseitig geschlossenen Vertiefung oder dergleichen gestaltet sein.
- Der zumindest eine Rastvorsprung und die zumindest eine zugeordnete Rastausnehmung können an dem Stellarm und der zumindest einen Antriebsscheibe verteilt angeordnet sein. Bei nur einem einzigen Rastpaar kann der Rastvorsprung am Stellarm oder an der einzigen Antriebsscheibe oder an nur einer der Antriebsscheiben angeordnet sein und die Rastausnehmung entsprechend am Gegenbauteil, das heißt Antriebsscheibe oder Stellarm, angeordnet sein. Das zumindest eine Rastpaar beziehungsweise der jeweilige Rastvorsprung und die jeweils zugeordnete Rastausnehmung sind derart einander zugeordnet, dass die Rastmechanik ausgehend von dem freigegebenen Zustand ausschließlich durch eine Schwenkbewegung des Stellarms relativ zu der zumindest einen Antriebsscheibe in den verrasteten Zustand überführt wird.
- Die Rastverbindung ist zweckmäßigerweise derart ausgelegt, dass die im Betrieb auf den Deckelsteller üblicherweise einwirkenden Kräfte nicht zu einer Entkoppelung der verrasteten Bauteile, nämlich Stellarm und Antriebsscheibe, führt. Die auf das jeweilige Rastelement, beispielsweise auf den Rastvorsprung, der Rastmechanik üblicherweise einwirkende Scherkraft liegt bei etwa 400 Newton. Je nach Vorgabe kann die Rastverbindung aber auch eine irreversible Rastverbindung sein, sodass eine Entkoppelung beziehungsweise Lösen der verrasteten Bauteile nur durch Zerstörung der Rastverbindung möglich wäre.
- Gemäß einem weiteren Aspekt der vorliegenden Erfindung kann der Deckelsteller zwei Antriebsscheiben aufweisen. Dadurch wird ein stabiler Deckelsteller bereitgestellt. Vorzugsweise ist der Stellarm zwischen den beiden Antriebsscheiben angeordnet. Die Rastmechanik kann über beide Antriebsscheiben und den dazwischenliegenden Stellarm verteilt angeordnet sein, wodurch eine stabilere Rastverbindung bereitgestellt werden kann. Weiterhin ist von Vorteil, dass sich durch die axiale Beabstandung der beiden Antriebsscheiben eine größere Abstützfläche ergibt, an der sich der Stellantrieb abstützen kann. Somit kann die jeweilige Antriebsscheibe aus Blech geformt sein, das mitunter nur eine dünne Blechdicke aufweist. Die Abstützfläche verläuft bevorzugt parallel zur Schwenkachse und kann eine Stellkontur ausbilden, an der sich der Stellantrieb abstützt. Die beiden Antriebsscheiben können identisch ausgebildet sein. Grundsätzlich können die Antriebsscheiben auch unterschiedlich ausgestaltet sein, wobei insbesondere nur eine der Antriebsscheiben eine Stellkontur aufweisen kann. Dann würde die weitere Antriebsscheibe lediglich der Stützung des Stellarms dienen und zur weiteren Stabilisierung der Verbindung zwischen dem Stellarm und den Antriebsscheiben im verrasteten Zustand beitragen.
- Des Weiteren können die beiden Antriebsscheiben durch eine Hülse miteinander verbunden sein. Die Hülse kann konzentrisch zur Schwenkachse angeordnet sein. Auf diese Weise können die beiden Antriebsscheiben drehfest miteinander verbunden und schwenkbar um die Schwenkachse gelagert sein. Die beiden Antriebsscheiben und die Hülse können zueinander eine Presspassung aufweisen. Ebenso möglich ist, dass die Hülse fest an den Antriebsscheiben angeformt ist oder mit den Antriebsscheibe verbunden, insbesondere durch Löten oder Kleben verbunden ist.
- Der Deckelsteller kann ein Gelenkelement aufweisen, das die Schwenkachse bildet und an dem die Antriebsscheibe schwenkbar befestigt sein kann. Das Gelenkelement kann beispielsweise bolzen- oder zapfenförmig ausgebildet sein. Weiterhin kann das Gelenkelement an einem Grundkörper des Deckelstellers angeordnet oder ausgebildet sein. Der Grundkörper kann beispielsweise ein Gehäuse sein, das an einer Seitenwand eines Korpus des Möbels montiert werden kann. Beispielsweise kann die Hülse, über die die Antriebsscheiben miteinander verbunden sind, auf das Gelenkelement aufgeschoben sein.
- Gemäß einer ersten Ausgestaltung der vorliegenden Erfindung kann der Stellarm zusammen mit der Antriebsscheibe um dieselbe Schwenkachse schwenkbar, respektive gelagert sein. Somit kann der Stellarm im freigegebenen Zustand relativ zu der Antriebsscheibe um die gemeinsame Schwenkachse schwenkbar sein. Der Stellarm kann am Grundkörper schwenkbar gehalten sein. Hierzu kann der Stellarm eine Aufnahmebohrung aufweisen, durch die sich beispielsweise das am Grundkörper angeordnete Gelenkelement erstreckt. Vorzugsweise erstreckt sich die Hülse, die die beiden Antriebsscheiben drehfest verbindet, durch die Aufnahmebohrung des Stellarms, der zwischen den beiden Antriebsscheiben angeordnet sein kann. Um die relative Schwenkbewegung zwischen dem Stellarm und den beiden Antriebsscheiben zu gewährleisten, können der Stellarm und die Hülse zueinander eine Spielpassung aufweisen. Somit bilden die einzelnen Bauteile Stellarm und Antriebsscheiben eine bauliche Einheit, die auf einfach herzustellende Weise insbesondere an dem Gelenkelement des Deckelstellers schwenkbar gelagert sein kann. Zweckmäßigerweise sind der Rastvorsprung und die zugeordnete Rastausnehmung des zumindest einen Rastpaares auf einem gemeinsamen Kreisringausschnitt um die Schwenkachse angeordnet. Bei der ersten Ausgestaltung kann die Antriebsscheibe besonders kompakt gestaltet sein. Vorzugsweise kann die Antriebsscheibe vollständig innerhalb eines von einem Gehäuse des Deckelstellers umschlossenen Innenraumes des Deckelstellers untergebracht sein und steht nicht aus dem Gehäuse hervor. Dadurch wird das Unfallrisiko durch die stets kraftangetriebene Antriebsscheibe reduziert.
- Gemäß einer zweiten Ausgestaltung der vorliegenden Erfindung kann der Stellarm an der zumindest einen Antriebsscheibe gehalten sein. Hierzu kann der Stellarm um eine weitere Schwenkachse schwenkbar sein, wobei die weitere Schwenkachse von der Schwenkachse, um die die Antriebsscheibe schwenkbar ist, radial beabstandet ist. Auf diese Weise schwenkt der Stellarm im freigegebenen Zustand relativ zu der Antriebsscheibe um die weitere Schwenkachse. Zweckmäßigerweise sind der Rastvorsprung und die zugeordnete Rastausnehmung des zumindest einen Rastpaares auf einem gemeinsamen Kreisringausschnitt um die weitere Schwenkachse angeordnet.
- Für sämtliche Ausgestaltungen gilt gleichermaßen, dass die Rastmechanik grundsätzlich auch mehrere der Rastpaare, insbesondere zwei, drei, vier, fünf, sechs Rastpaare aufweisen kann. Dadurch wird eine stabile Verbindung zwischen dem Stellarm und der Antriebsscheibe im verrasteten Zustand bereitgestellt. Die jeweiligen Rastpaare können untereinander auch unterschiedliche radiale Abstände zur zugeordneten Schwenkachse aufweisen oder Teilmengen, beispielsweise eine erste Teilmenge der Rastpaare und eine zweite Teilmenge der Rastpaare, können unterschiedliche radiale Abstände zur zugeordneten Schwenkachse aufweisen.
- Gemäß einem Aspekt der vorliegenden Erfindung können die Antriebsscheiben jeweils zumindest eine der Rastausnehmungen und der zwischen den beiden Antriebsscheiben angeordnete Stellarm zumindest zwei der Rastvorsprünge aufweisen. Im freigegebenen Zustand sind die Rastvorsprünge vorzugsweise außerhalb der Antriebsscheiben, das heißt in einem nicht von den Antriebsscheiben überlappten Bereich angeordnet. Die Rastvorsprünge werden dann erst durch die Schwenkbewegung des Stellarms zwischen die Antriebsscheiben bewegt und verrasten dort mit den in den Antriebsscheiben gestalteten Rastausnehmungen. Um den Kraftaufwand für die Schwenkbewegung des Stellarms zu verringern, kann zumindest ein Abstandhalter zwischen den beiden Antriebsscheiben angeordnet sein. Die beiden Antriebsscheiben können axial elastisch gestaltet sein und können im freigegebenen Zustand durch den zumindest einen Abstandhalter axial elastisch auseinander gedrückt werden. Der zumindest eine Abstandhalter kann in der zumindest einen Rastausnehmung sitzen. Vorzugsweise kann der zumindest eine Abstandhalter in zwei in axialer Richtung einander gegenüberliegenden Rastausnehmungen der beiden voneinander beabstandeten Antriebsscheiben eingesetzt sein. Wenn der Stellarm zur Verrastung mit den Antriebsscheiben insbesondere in Richtung der Offenstellung geschwenkt wird, kann eine Stirnseite des Stellarms den zumindest einen Abstandhalter wegdrücken und somit die Rastausnehmungen für die nachfolgenden Rastvorsprünge freigeben. Dadurch verbessert sich die Rastwirkung, da bei Überdeckung des zumindest einen Rastvorsprungs mit der zugehörigen Rastausnehmung der Rastvorsprung in die Rastausnehmung insbesondere federnd einrasten kann, indem sich die Antriebsscheibe und der Stellarm wieder einander annähern.
- Gemäß einem alternativen Aspekt der vorliegenden Erfindung können die Antriebsscheiben jeweils zumindest einen der Rastvorsprünge und der zwischen den beiden Antriebsscheiben angeordnete Stellarm zumindest zwei der Rastausnehmungen aufweisen. Jeweils zwei der Rastvorsprünge können in axialer Richtung einander gegenüberliegend angeordnet sein und die beiden axial elastischen Antriebsscheiben im freigegebenen Zustand axial auseinander drücken. Auf diese Weise kann der Kraftaufwand für die Schwenkbewegung des Stellarms ebenfalls verringert werden, da die Rastvorsprünge im freigegebenen Zustand eine Zusatzfunktion als Abstandhalter übernehmen. Zudem verbessert sich dadurch die Rastwirkung, da bei Überdeckung des zumindest einen Rastvorsprungs mit der zugehörigen Rastausnehmung der Rastvorsprung in die Rastausnehmung insbesondere federnd einrasten kann, indem sich die Antriebsscheibe und der Stellarm wieder einander annähern.
- Des Weiteren kann der zumindest eine Rastvorsprung eine schräge Gleitfläche aufweisen. Wenn der zumindest eine Rastvorsprung der Antriebsscheibe zugeordnet ist, kann die Gleitfläche an einer im freigegebenen Zustand dem Stellarm zugewandten Seite des jeweiligen Rastvorsprungs ausgebildet sein. Wenn der zumindest eine Rastvorsprung dem Stellarm zugeordnet ist, kann die Gleitfläche an einer im freigegebenen Zustand der Antriebsscheibe zugewandten Seite des jeweiligen Rastvorsprungs ausgebildet sein. Dadurch wird der Koppelvorgang zwischen dem Stellarm und der Antriebsscheibe vereinfacht.
- Um die Handhabung der Rastmechanik zu vereinfachen, kann ein Endanschlag vorhanden sein. Insbesondere kann an der Antriebsscheibe ein Endanschlag angeordnet sein, der die Schwenkbewegung des Stellarms relativ zur Antriebsscheibe begrenzt.
- In bevorzugter Weise verrastet die Rastmechanik erst in der Offenstellung des Deckelstellers. Damit kann der Stellarm durch den Stellantrieb nicht unbeabsichtigt weiter hochschnellen, wodurch eine noch sichere Montage ermöglicht wird. Vorzugsweise wird zur Einnahme des verrasteten Zustandes nur der Stellarm bewegt und die Antriebsscheibe steht während der Koppelvorgangs still. Zweckmäßigerweise befindet sich die Antriebsscheibe hierzu bereits vor der Verrastung in der Offenstellung. Insbesondere weist die Antriebsscheibe eine Stellkontur auf, die sich von einem Anfangspunkt, an dem sich der Stellantrieb abstützt, wenn der Deckelsteller in der Schließstellung ist, bis zu einem Endpunkt, an dem sich der Stellantrieb abstützt, wenn der Deckelsteller in der Offenstellung ist, erstreckt. Somit kann die Antriebsscheibe auch als Kurvenscheibe bezeichnet werden. Im freigegebenen Zustand kann sich der Stellantrieb somit am Endpunkt der Stellkontur abstützen, sodass die Antriebsscheibe beim Koppelvorgang mit dem Stellarm nicht weiter geschwenkt werden kann. Dadurch wird der Koppelvorgang vereinfacht, da die Antriebsscheibe durch den Stellantrieb in die Offenstellung gedrückt wird und ein manuelles Festsetzen der Antriebsscheibe nicht notwendig ist.
- Bevorzugte Ausführungsbeispiele erfindungsgemäßer Deckelsteller werden im Folgenden anhand der Zeichnungen näher erläutert. Hierin zeigen:
- Figur 1
- einen Deckelsteller gemäß einer ersten Ausführungsform der vorliegenden Erfindung in Seitenschnittansicht, wobei der Deckelsteller in einem freigegebenen Zustand gezeigt ist;
- Figur 2
- einen vergrößerten Teilausschnitt des Deckelstellers aus
Figur 1 in perspektivischer Ansicht, wobei der Deckelsteller in einem weiterhin freigegebenem Zustand gezeigt ist; - Figur 3
- eine perspektivische Ansicht eines Abstandhalters des Deckelstellers aus
Figur 1 ; - Figur 4
- eine perspektivische Ansicht eines Koppelelementes mit zwei Rastvorsprüngen für den Deckelsteller aus
Figur 1 ; - Figur 5
- einen vergrößerten Teilausschnitt des Deckelstellers aus
Figur 1 in perspektivischer Ansicht, wobei der Deckelsteller in einem verrasteten Zustand gezeigt ist; - Figur 6
- den Deckelsteller aus
Figur 1 in Seitenschnittansicht, wobei der Deckelsteller in dem verrasteten Zustand gezeigt ist; - Figur 7
- einen Deckelsteller gemäß einer zweiten Ausführungsform der vorliegenden Erfindung in Seitenschnittansicht, wobei der Deckelsteller in einem freigegebenen Zustand gezeigt ist;
- Figur 8
- einen vergrößerten Teilausschnitt des Deckelstellers aus
Figur 7 in Seitenschnittansicht, wobei der Deckelsteller in einem verrasteten Zustand gezeigt ist; - Figur 9
- einen vergrößerten Teilausschnitt des Deckelstellers aus
Figur 7 in perspektivischer Ansicht, wobei der Deckelsteller in dem freigegebenen Zustand gezeigt ist; - Figur 10
- einen vergrößerten Teilausschnitt des Deckelstellers aus
Figur 7 in Seitenschnittansicht, wobei der Deckelsteller in dem freigegebenen Zustand gezeigt ist; - Figur 11
- einen vergrößerten Teilausschnitt des Deckelstellers aus
Figur 7 in perspektivischer Ansicht, wobei der Deckelsteller in dem freigegebenen Zustand gezeigt ist; - Figur 12
- einen vergrößerten Teilausschnitt des Deckelstellers aus
Figur 7 in Seitenschnittansicht, wobei der Deckelsteller an einem Möbelkorpus montiert und in einer Offenstellung positioniert ist, und wobei der Deckelsteller in dem verrasteten Zustand gezeigt ist; - Figur 13
- eine weitere Seitenschnittansicht des Deckelstellers aus
Figur 12 ; und - Figur 14
- eine weitere Seitenschnittansicht des Deckelstellers aus
Figur 12 , wobei der Deckelsteller in einer Schließstellung positioniert und in dem freigegebenen Zustand gezeigt ist. -
Figuren 1 bis 6 zeigen den Deckelsteller 1 gemäß einer ersten Ausführungsform der vorliegenden Erfindung. Der Deckelsteller 1 dient in an sich bekannter Weise zur Stellung einer nicht gezeigten Möbelklappe oder eines Deckels zwischen einer Offenstellung, in welcher die Möbelklappe geöffnet, respektive nach oben geschwenkt ist, und einer Schließstellung, in welcher die Möbelklappe geschlossen, respektive nach unten geschwenkt ist und einen nicht gezeigten Möbelkorpus verschließt. Üblicherweise sind am Möbelkorpus zwei der erfindungsgemäßen Deckelsteller 1 befestigt, sodass die Möbelklappe über einen linken und einen rechten Deckelsteller 1 gestellt wird. - Der Deckelsteller 1 weist einen Grundkörper 2 in Form eines Gehäuses auf, der an einer Seitenwand des Möbelkorpus befestigt werden kann. An dem Grundkörper 2 sind zwei Antriebsscheiben 3 und ein zwischen den beiden Antriebsscheiben 3 angeordneter Stellarm 4 um eine gemeinsame Schwenkachse X schwenkbar gelagert. Weiterhin weist der Deckelsteller 1 einen Stellantrieb 5 auf, der an dem Grundkörper 2 befestigt ist und sich an den beiden Antriebsscheiben 3 abstützt. Hierzu sind an den beiden axial voneinander beabstandeten Antriebsscheiben 3 Stellkonturen 6 ausgebildet, wobei eine Rolle 7 des Stellantriebs 5 an den Stellkonturen 6 abläuft. Der Stellantrieb 5 kann beispielsweise ein Federpaket, insbesondere mit einer Gasdruckfeder aufweisen.
- Die Antriebsscheiben 3 sind hier identisch ausgebildet und können beispielsweise aus Blech, insbesondere einem dünnwandigen Blech, geformt, insbesondere gestanzt sein. In den
Figuren 1, 2 und5 ist erkennbar, dass die Antriebsscheiben 3 eine kompakte, zumindest in etwa rautenförmige Grundform aufweisen. Die Antriebsscheiben 3 sind, in Draufsicht auf die jeweilige Antriebsscheibe 3 betrachtet, in einem Eckbereich schwenkbar am Grundkörper 2 gelagert und treten unabhängig von ihrer Drehstellung nicht aus dem Grundkörper 2 hervor. Diese kompakte Ausgestaltung ist möglich, da die Antriebsscheiben 3 und der Stellarm 4 um die gemeinsame Schwenkachse X schwenkbar sind. - Zur schwenkbaren Lagerung der Antriebsscheiben 3 und des Stellarms 4 ist am Grundkörper 2 ein Gelenkelement 8 angeordnet. Das Gelenkelement 8 ist zylindrisch, respektive zapfenförmig ausgebildet und bildet die Schwenkachse X. Die Antriebsscheiben 3 weisen jeweils einen am Gelenkelement 8 gehaltenen Gelenkabschnitt 9 mit jeweils einer Haltebohrung 10 auf. In die Haltebohrungen 10 ist eine Hülse 11 eingepresst, sodass die Antriebsscheiben 3 drehfest miteinander verbunden sind. Weiterhin weist der Stellarm 4 einen am Gelenkelement 8 gehaltenen Gelenkabschnitt 12 auf, der eine konzentrisch zur Hülse 11 gestaltete Aufnahmebohrung 13 aufweist. Der Stellarm 4 ist zwischen den beiden Antriebsscheiben 3 auf die Hülse 11 aufgeschoben, wobei die Hülse 11 die Aufnahmebohrung 13 durchgreift. Der Stellarm 4 und die Hülse 11 weisen zueinander eine Spielpassung auf, sodass der Stellarm 4 und die Antriebsscheiben 3 relativ zueinander schwenkbar sind. Somit bilden die einzelnen Bauteile Stellarm 4 und Antriebsscheiben 3 eine gemeinsame Baueinheit, wobei die Antriebsscheiben 3, insbesondere die Gelenkabschnitte 9 der Antriebsscheiben 3, und der Stellarm 4, insbesondere der Gelenkabschnitt 12 des Stellarms 4, auf unterschiedlichen Ebenen entlang der Schwenkachse X liegen. Die Hülse 11 ist konzentrisch zum Gelenkelement 8 angeordnet und auf dieses aufgeschoben, sodass der Stellarm 4 und die Antriebsscheiben 3 um die Schwenkachse X schwenkbar gelagert sind.
- Um den Stellarm 4 mittels des Stellantriebs 5 antreiben zu können, weist der Deckelsteller 1 eine Rastmechanik 24 zur drehfesten Verbindung des Stellarms 4 mit den Antriebsscheiben 3 auf. In den
Figuren 1 und 2 ist die Rastmechanik 24 in einem freigegebenen Zustand gezeigt, in dem der Stellarm 4 von den beiden Antriebsscheiben 3 gelöst, respektive entkoppelt ist. Der Stellarm 4 und die beiden Antriebsscheiben 3 sind dann auf der gemeinsamen Schwenkachse X relativ zueinander schwenkbar. Damit ist der Kraftfluss zwischen dem Stellarm 4 und dem Stellantrieb 5 unterbrochen, sodass im freigegebenen Zustand der Stellarm 4 antriebslos ist. In denFiguren 5 und 6 ist die Rastmechanik 24 in einem verrasteten Zustand gezeigt, in dem der Stellarm 4 an den Antriebsscheiben 3 drehfest gehalten ist. Somit sind der Stellarm 4 und die Antriebsscheiben 3 um die Schwenkachse X gemeinsam schwenkbar, und zwar in beiden Drehrichtungen um die Schwenkachse X. - Die Rastmechanik 24 ist derart ausgebildet und angeordnet, dass die Rastmechanik 24 ausgehend von dem freigegebenen Zustand ausschließlich durch eine Schwenkbewegung des Stellarms 4 um die Schwenkachse X relativ zu den Antriebsscheiben 3 in den verrasteten Zustand überführt wird. Konkret weist die Rastmechanik 24 hier vier Rastpaare mit jeweils einem Rastvorsprung 14 und je einer zugeordneten Rastausnehmung 15 auf. Die hier insgesamt vier Rastvorsprünge 14 sind an Enden von hier zwei stiftförmigen Elementen 16 gebildet, die in Bohrungen des Stellarms 4 eingepresst sind und den Stellarm 4 axial überragen. Die hier vier Rastausnehmungen 15 sind als vier Durchgangsbohrungen in den Antriebsscheiben 3 gestaltet.
- In der
Figur 4 ist eines der hier zwei stiftförmigen Elemente 16 als Einzelbauteil gezeigt. - Die stiftförmigen Elemente 16 weisen eine zylindrische Grundform mit zwei kegelförmigen Enden 17 zur Bildung schräger Gleitflächen auf. Der kleinste Außendurchmesser der Enden 17 entspricht zumindest in etwa dem Innendurchmesser der Rastausnehmung 15, die im Querschnitt betrachtet kreisförmig gestaltet sind. Jede der Antriebsscheiben 3 weist hier zwei der Rastausnehmungen 15 auf, die in axialer Richtung paarweise fluchtend übereinander angeordnet sind. Jeweils einer der Rastvorsprünge 14 bildet zusammen mit einer der Rastausnehmungen 15, in die der Rastvorsprung 14 im verrasteten Zustand eingreift, eines der Rastpaare. Die im verrasteten Zustand axial einander gegenüberliegenden Rastpaare liegen auf einem gemeinsamen Kreisringausschnitt R1, R2, der bekanntermaßen von einem Außenring und einem Innenring mit gleichem Mittelpunkt begrenzt wird. Der Mittelpunkt liegt auf der Schwenkachse X. Der Übersichtlichkeit halber ist der jeweilige Kreisringausschnitt R1, R2 nur durch einen Mittelring angedeutet, der zwischen dem jeweiligen Außenring und Innenring liegt. In den
Figuren 1, 2 ,5 und 6 ist erkennbar, dass der radiale Abstand des Kreisringausschnitts R1, auf dem zwei der Rastpaare liegen, kleiner ist als der radiale Abstand des weiteren Kreisringausschnitts R2, auf dem die anderen zwei Rastpaare liegen. - Der axiale Abstand zwischen den Antriebsscheiben 3 entspricht zumindest in etwa der Dicke des Stellarms 4 entlang des Gelenkabschnitts 12. Im verrasteten Zustand liegen die beiden Antriebsscheiben 3 flächig an dem Stellarm 4 an. Im freigegebenen Zustand liegen die Rastvorsprünge 14 außerhalb der Antriebsscheiben 3 und werden erst durch die Schwenkbewegung des Stellarms 4 zwischen die Antriebsscheiben 3 geschoben. Zwischen den Antriebsscheiben 3 können, wie in der
Figur 2 gezeigt, Abstandhalter 17 eingesetzt sein. In derFigur 3 ist der Abstandhalter 17 als einzelnes Bauteil gezeigt, der im freigegebenen Zustand die beiden Antriebsscheiben 3 axial auseinander drückt. Die Abstandhalter 17 sind zylindrisch ausgebildet und weisen einen Zentralabschnitt 18 mit einem ersten Durchmesser und zwei endseitig ausgebildeten Halteabschnitten 19 mit jeweils einem gegenüber dem ersten Durchmesser reduzierten zweiten Durchmesser auf. Der Durchmesser der Halteabschnitte 19 entspricht zumindest in etwa dem Innendurchmesser der kreisförmigen Rastausnehmungen 15. Im eingesetzten Zustand der Abstandhalter 17 sind die Halteabschnitte 19 in jeweils zwei der einander gegenüberliegend ausgebildeten Rastausnehmungen 15 der Antriebsscheiben 3 eingesteckt. Die axiale Länge der Halteabschnitte 19 entspricht zumindest in etwa der Länge der stiftförmigen Elemente 16. Durch Schwenken des Stellarms 4 in die Offenstellung drückt eine Stirnseite 20 des Stellarms 4 die Abstandhalter 17 weg und gibt somit die Rastausnehmungen 15 für die nachfolgenden Rastvorsprünge 14 frei. Die Schwenkrichtung ist in derFigur 2 mit dem Pfeil S gezeigt. Sobald die Abstandhalter 17 aus dem Zwischenraum zwischen den beiden Antriebsscheiben 3 rausgedrängt wurden, nähern sich die Antriebsscheiben 3 wieder an, wodurch die Rastvorsprünge 14 in die Rastausnehmungen 15 rastend eingreifen. - Gemäß einer nicht gezeigten Ausgestaltung können die Rastvorsprünge 14 in dem freigegebenen Zustand bereits in einem von den Antriebsscheiben 3 überdeckten Bereich des Deckelstellers 1 angeordnet sein. Dann können die Rastvorsprünge 14 im freigegebenen Zustand gegen Flächen 23 der Antriebsscheiben 3 drücken und diese somit in axialer Richtung elastisch gegeneinander vorspannen. Sobald die Rastvorsprünge 14 die jeweiligen Rastausnehmungen 15 überlagern, nähern sich die Antriebsscheiben 3 wieder an, wodurch die Rastvorsprünge 14 in die Rastausnehmungen 15 rastend eingreifen.
- Um den Stellarm 4 aus dem freigegebenen Zustand, wie in den
Figuren 1 und 2 gezeigt, in den verrasteten Zustand, wie in denFiguren 5 und 6 gezeigt, zu verlagern, wird der Stellarm 4 in der Schwenkrichtung S relativ zu den beiden Antriebsscheiben 3 um die gemeinsame Schwenkachse X geschwenkt. Bei diesem Schwenkvorgang wird der Stellarm 4 manuell bis in die Offenstellung gedreht. Die Antriebsscheiben 3 stehen während dieser für die Koppelung vorgesehenen Schwenkbewegung still, da die Antriebsscheiben 3 im freigegebenen Zustand durch den Stellantrieb 5 bereits in die Offenstellung vorgestellt sind. - Konkret ist in der
Figur 1 erkennbar, dass die Stellkonturen 6 der Antriebsscheiben 3 zwischen einem Anfangspunkt 21 und einem Endpunkt 22 ausgebildet sind. Wenn sich die Rolle 7 des Stellantriebs 5 am Anfangspunkt 21 abstützt, sind die Antriebsscheiben 3, beziehungsweise im verrasteten Zustand der Deckelsteller 1 in der nicht gezeigten Schließstellung. Wenn sich die Rolle 7 dagegen am Endpunkt 22 abstützt, sind die Antriebsscheiben 3, beziehungsweise im verrasteten Zustand der Deckelsteller 1 in der Offenstellung. Im freigegebenen Zustand dreht der Stellantrieb 5 somit nur die beiden Antriebsscheiben 3 in die Offenstellung, wie in derFigur 1 gezeigt. Wenn anschließend der Stellarm 4 manuell in die Offenstellung geschwenkt ist, überlagern die Rastvorsprünge 14 die Rastausnehmungen 15 und greifen in diese rastend ein. In derFigur 6 ist der verrastete Zustand gezeigt, den der Deckelsteller 1 einnimmt, nachdem der Stellarm 4 manuell bis in die Offenstellung geschwenkt wurde. In dem verrasteten Zustand wird die vom Stellantrieb 5 aufgebrachte Kraft über die Rastmechanik 24 auf den Stellarm 4 übertragen. - In an sich bekannter Weise kann weiterhin ein Deckel oder eine Klappe am Deckelsteller 1 montiert werden. Dadurch, dass die Rastmechanik 24 auch ohne direkten Sichtkontakt auf den Stellarm 4 verrastet werden kann, kann der Deckel oder die Klappe zunächst am freigegebenen Stellarm 4 montiert werden. Anschließend kann die Rastmechanik 24 durch Schwenken des Stellarms 4 zusammen mit der montierten Klappe oder des Deckels um die Schwenkachse X in die Offenstellung in den verrasteten Zustand überführt werden, in welchem der Stellarm 4 drehfest mit den Antriebsscheiben 3 verbunden ist.
- In den
Figuren 7 bis 14 ist ein Deckelsteller 25 gemäß einer zweiten Ausführungsform der vorliegenden Erfindung gezeigt. Da der Grundaufbau des Deckelstellers 25 in weiten Teilen demjenigen gemäß denFiguren 1 bis 6 entspricht, wird hinsichtlich der Gemeinsamkeiten auf obige Beschreibung Bezug genommen. Dabei sind gleiche beziehungsweise einander entsprechende Einzelheiten mit gleichen Bezugszeichen versehen, wie in denFiguren 1 bis 6 . Im Folgenden werden im Wesentlichen die Unterschiede des vorliegenden Deckelstellers 25 gegenüber der obigen Ausführungsform erläutert, die vor allem in der schwenkbaren Befestigung des Stellarms 4 liegen. Dieser Deckelsteller 25 unterscheidet sich im Wesentlichen durch die Anbindung des Stellarms 4 mit den Antriebsscheiben 3 und deren Verrastung mittels des Rastmechanismus 24. - Die Antriebsscheiben 3 weisen eine zumindest in etwa V-förmige Grundform auf. In Draufsicht auf die Antriebsscheiben 3 sind diese jeweils an einem Ende eines Schenkels am Grundkörper 2 um die Schwenkachse X schwenkbar gelagert. Die Antriebsscheiben 3 sind ebenfalls um das Gelenkelement 8 schwenkbar, welches innerhalb des Grundkörpers 2, respektive Gehäuses angeordnet ist. Der Stellarm 4 wiederum ist im freigegebenen Zustand der Rastmechanik 24 um eine weitere Schwenkachse Y schwenkbar gelagert. Die weitere Schwenkachse Y ist von der Schwenkachse X der Antriebsscheiben 3 radial beabstandet. Radial beabstandet bedeutet hier, dass die beiden Schwenkachsen X, Y mit einem Abstand und parallel zueinander verlaufen. Hierzu ist der Stellarm 4 zwischen den beiden Antriebsscheiben 3 angeordnet und gelenkig mit diesen verbunden. Die weitere Schwenkachse Y ist hier an einem Abschnitt der Antriebsscheiben 3 gestaltet, der außerhalb des Grundkörpers 2 liegt.
- Um den Stellarm 4 mittels des Stellantriebs 5 antreiben zu können, weist der Deckelsteller 1 ebenfalls die Rastmechanik 24 zur drehfesten Verbindung des Stellarms 4 mit den Antriebsscheiben 3 auf. In den
Figuren 7 ,9, 10, 11 und14 ist die Rastmechanik 24 in einem freigegebenen Zustand gezeigt, in dem der Stellarm 4 von den beiden Antriebsscheiben 3 gelöst, respektive entkoppelt ist. Der Stellarm 4 ist in dem freigegebenen Zustand um die weitere Schwenkachse Y relativ zu den Antriebsscheiben 3 schwenkbar. Damit ist der Kraftfluss zwischen dem Stellarm 4 und dem Stellantrieb 5 unterbrochen, sodass im freigegebenen Zustand der Stellarm 4 antriebslos ist. In denFiguren 8 ,12 und 13 ist die Rastmechanik 24 in einem verrasteten Zustand gezeigt, in dem der Stellarm 4 an den Antriebsscheiben 3 drehfest gehalten ist. Dann sind der Stellarm 4 und die Antriebsscheiben 3 um die Schwenkachse X gemeinsam schwenkbar, und zwar in beiden Drehrichtungen um die Schwenkachse X. - Die Rastmechanik 24 ist derart ausgebildet und angeordnet, dass die Rastmechanik 24 ausgehend von dem freigegebenen Zustand ausschließlich durch eine Schwenkbewegung des Stellarms 4 um die weitere Schwenkachse Y relativ zu den Antriebsscheiben 3 in den verrasteten Zustand überführt wird. Konkret weist die Rastmechanik 24 hier zwei Rastpaare mit jeweils einem Rastvorsprung 26 und je einer zugeordneten Rastausnehmung 27 auf. Die hier insgesamt zwei Rastvorsprünge 26 sind an Enden von hier zwei stiftförmigen Elementen 28 gebildet, die in Bohrungen der Antriebsscheiben 3 eingepresst sind und jeweils in Richtung der gegenüberliegenden Antriebsscheibe 3 in axialer Richtung vorstehen. Die beiden Rastausnehmungen 27 sind durch eine sich durch den Stellarm 4 in axialer Richtung erstreckende Durchgangsbohrung gebildet, respektive miteinander verbunden. Die Rastvorsprünge 26 und die zugeordneten Rastausnehmungen 27 der beiden Rastpaare sind auf einem gemeinsamen Kreisringausschnitt R3 um die weitere Schwenkachse Y angeordnet.
- Die beiden stiftförmigen Elemente 28 sind in axialer Richtung übereinander angeordnet und drücken im freigegebenen Zustand die beiden Antriebsscheiben 3 leicht auseinander, sodass der Stellarm 4 zwischen den Antriebsscheiben 3 eingeschwenkt werden kann. An der dem Stellarm 4 zugewandten Seite weisen die beiden Rastvorsprünge 26 eine schräge Gleitfläche 29 auf. Beim Schwenken des Stellarms 4 relativ zu den Antriebsscheiben 3 um die Schwenkachse Y in die Offenstellung drückt der Stellarm 4 mit einer gewölbten Vorlauffläche 30 gegen die Gleitfläche 29 der stiftförmigen Elemente 28 und drückt die Antriebsscheiben 3 weiter axial auseinander. Anschließend schiebt sich der Stellarm 4 zwischen die Rastvorsprünge 26, wobei die Schwenkbewegung mit Anschlag der Vorlauffläche 30 an einem Endanschlag 31 stoppt. Der Endanschlag 31 ist zwischen den Antriebsscheiben 3 angeordnet und mit diesen verbunden. Dann überlagern die Rastvorsprünge 26 die jeweiligen Rastausnehmungen 27, sodass sich die Antriebsscheiben 3 wieder annähern und die Rastvorsprünge 26 in die Rastausnehmungen 27 rastend eingreifen. Damit ist die Rastmechanik 24 in den verrasteten Zustand überführt. Der Endanschlag 31 liegt zusammen mit der gewölbten Vorlauffläche 30 des Stellarms 4 auf einem gemeinsamen Kreisringausschnitt R4 um die weitere Schwenkachse Y. In der
Figur 10 ist erkennbar, dass der radiale Abstand des Kreisringausschnitts R3, auf dem die Rastpaare liegen, größer ist als der radiale Abstand des weiteren Kreisringausschnitts R4, auf dem der Endanschlag 31 und die gewölbte Vorlauffläche 30 liegen. - In den
Figuren 12 bis 14 ist der Deckelsteller 25 an einem Möbelkorpus 32 montiert dargestellt. In derFigur 14 ist die Rastmechanik 24 im freigegebenen Zustand und der Stellarm 4 befindet sich in einer Position, die im Normalbetrieb des Deckelstellers 25 der Schließstellung entsprechen würde. Aus diesem in derFigur 14 gezeigten Zustand kann der Stellarm 4 in die Offenstellung, die in derFigur 13 gezeigt ist, manuell geschwenkt werden. Während dieser Schwenkbewegung des Stellarms 4 stehen die durch den Stellantrieb 5 bereits in die Offenstellung bewegten Antriebsscheiben 3 still, sodass hier nur der Stellarm 4 nach oben geschwenkt werden muss. Weiterhin weist der Deckelsteller 25 hier einen Steuerarm 33 auf, der um eine von den Schwenkachsen X, Y radial beabstandete dritte Schwenkachse Z am Grundkörper 2 schwenkbar gelagert ist. Der Steuerarm 33 und der Stellarm 4 sind an einem Befestigungselement 34 für einen nicht gezeigten Deckel, respektive Klappe gelenkig angebunden. -
- 1
- Deckelsteller
- 2
- Grundkörper
- 3
- Antriebsscheibe
- 4
- Stellarm
- 5
- Stellantrieb
- 6
- Stellkontur
- 7
- Rolle
- 8
- Gelenkelement
- 9
- Gelenkabschnitt
- 10
- Haltebohrung
- 11
- Hülse
- 12
- Gelenkabschnitt
- 13
- Aufnahmebohrung
- 14
- Rastvorsprung
- 15
- Rastausnehmung
- 16
- stiftförmiges Element
- 17
- Abstandhalter
- 18
- Zentralabschnitt
- 19
- Halteabschnitt
- 20
- Stirnseite
- 21
- Anfangspunkt
- 22
- Endpunkt
- 23
- Fläche
- 24
- Rastmechanik
- 25
- Deckelsteller
- 26
- Rastvorsprung
- 27
- Rastausnehmung
- 28
- stiftförmiges Element
- 29
- Gleitfläche
- 30
- Vorlauffläche
- 31
- Endanschlag
- 32
- Möbelkorpus
- 33
- Steuerarm
- 34
- Befestigungselement
- R
- Mittelring
- S
- Pfeil
- X
- Schwenkachse
- Y
- Schwenkachse
- Z
- Schwenkachse
Claims (15)
- Deckelsteller, der Folgendes aufweist:einen Grundkörper (2),zumindest eine Antriebsscheibe (3), die am Grundkörper (2) um eine Schwenkachse (X) schwenkbar befestigt ist,einen Stellantrieb (5), der zum Schwenken der zumindest einen Antriebsscheibe (3) um die Schwenkachse (X) an der zumindest einen Antriebsscheibe (3) abgestützt ist,einen Stellarm (4), der relativ zu der zumindest einen Antriebsscheibe (3) schwenkbar gehalten ist, undeine Rastmechanik (24), wobei in einem freigegebenen Zustand der Rastmechanik (24) der Stellarm (4) relativ zu der zumindest einen Antriebsscheibe (3) schwenkbar ist und in einem verrasteten Zustand der Rastmechanik (24) der Stellarm (4) an der zumindest einen Antriebsscheibe (3) drehfest gehalten ist, dadurch gekennzeichnet,dass die Rastmechanik (24) derart ausgebildet und angeordnet ist, dass die Rastmechanik (24) ausgehend von dem freigegebenen Zustand ausschließlich durch eine Schwenkbewegung des Stellarms (4) relativ zu der zumindest einen Antriebsscheibe (3) in den verrasteten Zustand überführt wird.
- Deckelsteller nach Anspruch 1, dadurch gekennzeichnet,
dass die Rastmechanik (24) zumindest ein im verrasteten Zustand zusammenwirkendes Rastpaar aufweist, das aus einem Rastvorsprung (14; 26) und einer Rastausnehmung (15; 27) besteht, wobei der zumindest eine Rastvorsprung (14; 26) und die zumindest eine zugeordnete Rastausnehmung (15; 27) an dem Stellarm (4) und der zumindest einen Antriebsscheibe (3) verteilt angeordnet und derart einander zugeordnet sind, dass die Rastmechanik (24) ausgehend von dem freigegebenen Zustand ausschließlich durch eine Schwenkbewegung des Stellarms (4) relativ zu der zumindest einen Antriebsscheibe (3) in den verrasteten Zustand überführt wird. - Deckelsteller nach Anspruch 1 oder 2, dadurch gekennzeichnet,
dass der Deckelsteller zwei Antriebsscheiben (3) aufweist, die insbesondere durch eine Hülse (11), die konzentrisch zur Schwenkachse (X) angeordnet ist, drehfest miteinander verbunden sind, wobei der Stellarm (4) zwischen den beiden Antriebsscheiben (3) angeordnet ist. - Deckelsteller nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet,
dass der Stellarm (4) am Grundkörper (2) gehalten und im freigegebenen Zustand relativ zu der zumindest einen Antriebsscheibe (3) um die Schwenkachse (X) schwenkbar ist. - Deckelsteller nach Anspruch 3 und 4, dadurch gekennzeichnet,
dass der Stellarm (4) eine Aufnahmebohrung (13) aufweist, durch die sich die Hülse (11) erstreckt, wobei der Stellarm (4) und die Hülse (11) zueinander eine Spielpassung aufweisen. - Deckelsteller nach Anspruch 4 oder 5, dadurch gekennzeichnet,
dass der Rastvorsprung (14) und die zugeordnete Rastausnehmung (15) des zumindest einen Rastpaares auf einem gemeinsamen Kreisringausschnitt (R1, R2) um die Schwenkachse (X) angeordnet sind. - Deckelsteller nach einem der Ansprüche 1 bis 3, dadurch gekennzeichnet,
dass der Stellarm (4) an der zumindest einen Antriebsscheibe (3) gehalten und im freigegebenen Zustand relativ zu der zumindest einen Antriebsscheibe (3) um eine weitere Schwenkachse (Y) schwenkbar ist, wobei die weitere Schwenkachse (Y) von der Schwenkachse (X), um die die zumindest eine Antriebsscheibe (3) schwenkbar ist, radial beabstandet ist. - Deckelsteller nach Anspruch 7, dadurch gekennzeichnet,
dass der Rastvorsprung (26) und die zugeordnete Rastausnehmung (27) des zumindest einen Rastpaares auf einem gemeinsamen Kreisringausschnitt (R3) um die weitere Schwenkachse (Y) angeordnet sind. - Deckelsteller nach einem der Ansprüche 1 bis 8, dadurch gekennzeichnet,
dass an den beiden Antriebsscheiben (3) und dem Stellarm (4) mindestens zwei einander zugeordnete Rastpaare vorhanden sind, wobei die Antriebsscheiben (3) jeweils zumindest eine der Rastausnehmungen (15) und der zwischen den beiden Antriebsscheiben (3) angeordnete Stellarm (4) zumindest zwei der Rastvorsprünge (14) aufweist. - Deckelsteller nach Anspruch 9, dadurch gekennzeichnet,
dass zumindest ein Abstandhalter (17) zwischen den beiden Antriebsscheiben (3) angeordnet ist und die beiden axial elastischen Antriebsscheiben (3) im freigegebenen Zustand axial auseinander drückt. - Deckelsteller nach einem der Ansprüche 1 bis 8, dadurch gekennzeichnet,
dass an den beiden Antriebsscheiben (3) und dem Stellarm (4) mindestens zwei einander zugeordnete Rastpaare vorhanden sind, wobei die Antriebsscheiben (3) jeweils zumindest einen der Rastvorsprünge (26) und der zwischen den beiden Antriebsscheiben (3) angeordnete Stellarm (4) zumindest zwei der Rastausnehmungen (27) aufweist. - Deckelsteller nach Anspruch 11, dadurch gekennzeichnet,
dass jeweils zwei der Rastvorsprünge (26) in axialer Richtung einander gegenüberliegend angeordnet sind und die beiden axial elastischen Antriebsscheiben (3) im freigegebenen Zustand axial auseinander drücken. - Deckelsteller nach einem der Ansprüche 1 bis 12, dadurch gekennzeichnet,
dass der zumindest eine Rastvorsprung (14; 26) eine schräge Gleitfläche (17; 29) aufweist. - Deckelsteller nach einem der Ansprüche 1 bis 13, dadurch gekennzeichnet,
dass ein Endanschlag (31) vorhanden ist, der die Schwenkbewegung des Stellarms (4) relativ zur zumindest einen Antriebsscheibe (3) begrenzt. - Deckelsteller nach einem der Ansprüche 1 bis 14, dadurch gekennzeichnet,
dass die zumindest eine Antriebsscheibe (3) eine Stellkontur (6) aufweist, die sich von einem Anfangspunkt (21), an dem sich der Stellantrieb (5) abstützt, wenn der Deckelsteller in einer Schließstellung ist, bis zu einem Endpunkt (22), an dem sich der Stellantrieb (5) abstützt, wenn der Deckelsteller in einer Offenstellung ist, erstreckt, wobei sich der Stellantrieb (5) im freigegebenen Zustand am Endpunkt (22) der Stellkontur (6) abstützt.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ES17202519T ES2963783T3 (es) | 2017-11-20 | 2017-11-20 | Posicionador de tapa |
| EP17202519.9A EP3486417B1 (de) | 2017-11-20 | 2017-11-20 | Deckelsteller |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17202519.9A EP3486417B1 (de) | 2017-11-20 | 2017-11-20 | Deckelsteller |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3486417A1 true EP3486417A1 (de) | 2019-05-22 |
| EP3486417B1 EP3486417B1 (de) | 2023-11-01 |
Family
ID=60409213
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17202519.9A Active EP3486417B1 (de) | 2017-11-20 | 2017-11-20 | Deckelsteller |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP3486417B1 (de) |
| ES (1) | ES2963783T3 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT524392A1 (de) * | 2020-11-12 | 2022-05-15 | Blum Gmbh Julius | Möbelbeschlag mit mindestens einem Drehhebel und mindestens einem Lagerstift |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT8702U1 (de) * | 2004-11-15 | 2006-11-15 | Blum Gmbh Julius | Stellantrieb mit zumindest einem stellarm, insbesondere zum antrieb einer möbelklappe |
| DE202014103519U1 (de) | 2014-07-29 | 2015-10-30 | Flap Competence Center Kft | Deckelstelleranordnung |
| DE102016100606B3 (de) | 2016-01-14 | 2017-06-14 | Flap Competence Center Kft | Deckelsteller |
-
2017
- 2017-11-20 EP EP17202519.9A patent/EP3486417B1/de active Active
- 2017-11-20 ES ES17202519T patent/ES2963783T3/es active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT8702U1 (de) * | 2004-11-15 | 2006-11-15 | Blum Gmbh Julius | Stellantrieb mit zumindest einem stellarm, insbesondere zum antrieb einer möbelklappe |
| DE202014103519U1 (de) | 2014-07-29 | 2015-10-30 | Flap Competence Center Kft | Deckelstelleranordnung |
| DE102016100606B3 (de) | 2016-01-14 | 2017-06-14 | Flap Competence Center Kft | Deckelsteller |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| AT524392A1 (de) * | 2020-11-12 | 2022-05-15 | Blum Gmbh Julius | Möbelbeschlag mit mindestens einem Drehhebel und mindestens einem Lagerstift |
| WO2022099333A1 (de) * | 2020-11-12 | 2022-05-19 | Julius Blum Gmbh | Möbelbeschlag mit mindestens einem drehhebel und mindestens einem lagerstift |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3486417B1 (de) | 2023-11-01 |
| ES2963783T3 (es) | 2024-04-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE60222211T2 (de) | Seitliche Verriegelungsanordnung für Ablagebehälter | |
| DE68917202T2 (de) | Öffnungs-/Schliessvorrichtung für eine Tür. | |
| EP3020998B1 (de) | Scheibenbremse | |
| DE112013005701B4 (de) | Pumpvorrichtung für einen Fahrzeugsitz | |
| DE3412139A1 (de) | Stellmechanismus | |
| DE102016113069A1 (de) | Lenkrolle mit einem Laufrad | |
| EP1284447B1 (de) | Schwenkbeschlag | |
| DE102004020655A1 (de) | Verriegelungseinheit für ein bewegliches Schließelement | |
| DE102010031133A1 (de) | Klemmrollenfreilauf für eine Verstellvorrichtung in einem Kraftfahrzeug | |
| DE2942789A1 (de) | Permutationsschloss | |
| DE112016001006B4 (de) | Lösbare rollenkupplung und verstellbare scharnierbaugruppe, die eine solche rollenkupplung verwendet | |
| DE102018207046A1 (de) | Sitzverstellung für Fahrzeugsitz | |
| DE102006032681B4 (de) | Gelenkbeschlag für Kraftfahrzeugsitze | |
| CH638011A5 (de) | Permutationsschloss. | |
| EP2873787A2 (de) | Betätigungshandhabe | |
| WO2017016996A1 (de) | Sitzversteller mit zusatzverriegelung | |
| DE10331868B4 (de) | Rastgelenkverbindung | |
| WO2016155934A1 (de) | Türgriffanordnung für ein kraftfahrzeug | |
| EP2748028B1 (de) | Verstellbeschlag mit einem axialsperrsystem zur ablaufsicherung | |
| DE19958300A1 (de) | Verstellvorrichtung für einen Kraftfahrzeugsitz mit einem Klemmgesperre, das ein erstes Gesperreteil und ein zweites Gesperreteil hat | |
| EP3498941B1 (de) | Betätigungshandhabe mit sperrvorrichtung | |
| EP3486417B1 (de) | Deckelsteller | |
| DE4419411C2 (de) | Gelenkbeschlag für Fahrzeugsitze, insbesondere Kraftfahrzeugsitze | |
| DE102015108675A1 (de) | Zylinderschlossanordnung | |
| EP0853991B1 (de) | Radialwalzkopf |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20191122 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| 17Q | First examination report despatched |
Effective date: 20200921 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: EXAMINATION IS IN PROGRESS |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230329 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20230710 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502017015549 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20231208 Year of fee payment: 7 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20231124 Year of fee payment: 7 Ref country code: FR Payment date: 20231117 Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG9D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20231101 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2963783 Country of ref document: ES Kind code of ref document: T3 Effective date: 20240402 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240202 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240301 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240301 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240202 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240201 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240301 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20231222 Year of fee payment: 7 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20240201 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231120 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231120 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231130 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20231130 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502017015549 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20231101 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |