EP3431436A1 - Commande d'une machine de manutention - Google Patents
Commande d'une machine de manutention Download PDFInfo
- Publication number
- EP3431436A1 EP3431436A1 EP17181715.8A EP17181715A EP3431436A1 EP 3431436 A1 EP3431436 A1 EP 3431436A1 EP 17181715 A EP17181715 A EP 17181715A EP 3431436 A1 EP3431436 A1 EP 3431436A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- movement
- speed
- handling arm
- main body
- operating mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000033001 locomotion Effects 0.000 claims abstract description 171
- 238000000034 method Methods 0.000 claims abstract description 52
- 230000001419 dependent effect Effects 0.000 claims abstract description 10
- 230000000694 effects Effects 0.000 claims abstract description 3
- 230000009471 action Effects 0.000 claims description 22
- 230000004044 response Effects 0.000 claims description 16
- 230000006870 function Effects 0.000 claims description 6
- 230000008569 process Effects 0.000 claims description 5
- 230000000087 stabilizing effect Effects 0.000 claims description 5
- 230000004913 activation Effects 0.000 claims description 4
- 230000005540 biological transmission Effects 0.000 claims description 4
- 230000007423 decrease Effects 0.000 claims description 4
- 238000001514 detection method Methods 0.000 claims description 4
- 230000009849 deactivation Effects 0.000 claims description 3
- 238000006073 displacement reaction Methods 0.000 claims description 2
- 238000005259 measurement Methods 0.000 description 23
- 230000001276 controlling effect Effects 0.000 description 6
- 238000012544 monitoring process Methods 0.000 description 4
- 230000000750 progressive effect Effects 0.000 description 4
- 238000012360 testing method Methods 0.000 description 4
- 238000010586 diagram Methods 0.000 description 3
- 230000007935 neutral effect Effects 0.000 description 3
- 230000003068 static effect Effects 0.000 description 3
- 238000012550 audit Methods 0.000 description 2
- 238000013475 authorization Methods 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000000875 corresponding effect Effects 0.000 description 2
- 238000005381 potential energy Methods 0.000 description 2
- 238000013519 translation Methods 0.000 description 2
- 208000031968 Cadaver Diseases 0.000 description 1
- 101100536354 Drosophila melanogaster tant gene Proteins 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 230000001186 cumulative effect Effects 0.000 description 1
- 238000005520 cutting process Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 210000000056 organ Anatomy 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000005096 rolling process Methods 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- 239000003381 stabilizer Substances 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
- B66C23/90—Devices for indicating or limiting lifting moment
- B66C23/905—Devices for indicating or limiting lifting moment electrical
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/18—Control systems or devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C15/00—Safety gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C23/00—Cranes comprising essentially a beam, boom, or triangular structure acting as a cantilever and mounted for translatory of swinging movements in vertical or horizontal planes or a combination of such movements, e.g. jib-cranes, derricks, tower cranes
- B66C23/88—Safety gear
- B66C23/90—Devices for indicating or limiting lifting moment
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F17/00—Safety devices, e.g. for limiting or indicating lifting force
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F17/00—Safety devices, e.g. for limiting or indicating lifting force
- B66F17/003—Safety devices, e.g. for limiting or indicating lifting force for fork-lift trucks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/065—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks non-masted
- B66F9/0655—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks non-masted with a telescopic boom
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F9/00—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes
- B66F9/06—Devices for lifting or lowering bulky or heavy goods for loading or unloading purposes movable, with their loads, on wheels or the like, e.g. fork-lift trucks
- B66F9/075—Constructional features or details
- B66F9/0755—Position control; Position detectors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/2025—Particular purposes of control systems not otherwise provided for
- E02F9/2033—Limiting the movement of frames or implements, e.g. to avoid collision between implements and the cabin
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/24—Safety devices, e.g. for preventing overload
Definitions
- the invention relates to the field of handling machines comprising a main body, generally intended to be placed on the ground, at least one handling arm intended to receive a payload to be moved, and an actuating device configured to perform a movement of the handling arm relative to the main body, and in particular to the handling machines.
- Such a machine can in particular be carried out in the form of a telehandler, forklift, lifting crane, mechanical digger, bucket loader or the like.
- the forces involved in the stability of an in-service material handling machine involve both gravitational forces also referred to as static loads, namely the weights of the handling arm, the payload, the main body and / or other elements of the machine; and inertial forces also known as dynamic loads, namely accelerations transmitted between the handling arm, the payload, the main body and / or other elements of the machine due to the movements effected in service, in particular the movements of the arm handling and the payload relative to the main body.
- An idea underlying the invention is to provide methods and control systems of a handling machine which allow to preserve the stability of the machine, in particular by taking into account the inertial forces, and which do not limit not the usability of the machine when taking account of inertial forces is made imprecise or inefficient because of the operating conditions.
- the invention provides a handling machine comprising: a main body, a handling arm for receiving a load to be moved, an actuating device configured to execute movement of the handling arm relative to the main body, a tilt moment indicative sensor responsive to a magnitude indicative of a tilting moment applied to the main body with respect to a tilting axis, a control unit configured to control the actuating device so as to stop or prevent movement of the executed or requested handling arm as soon as a stopping condition is satisfied, the stopping condition being dependent on the indicative magnitude of the measured tilting moment, and an operator selectable selector for selecting a simple operating mode and a reinforced operating mode.
- the stop condition used by the control unit is also dependent on a magnitude representative of the speed of movement of the handling arm executed or requested, and when the simple operating mode is selected, the stopping condition is independent of the magnitude representative of the speed of movement of the handling arm.
- the control unit applies a stopping condition which depends on the speed of movement of the handling arm, or a quantity representative of this speed. This makes it possible to take into account the inertial forces that may occur due to this speed, in the event of stopping the movement. Different methods based on speed can be used for this consideration.
- This mode of operation is particularly adapted to operating conditions in which the body of the machine is immobile, because the determination of the inertial forces can be performed with a satisfactory degree of accuracy in this case. In other words, it is then possible to set realistic speed limits to prohibit or suppress movements of the handling arm actually creating a risk of tipping in case of a stop.
- the stopping condition is independent of the magnitude representative of the speed of movement of the handling arm.
- the control of the handling arm can be performed in a simpler way.
- the method further comprises the step of preventing or stopping the movement of the handling arm as soon as the magnitude indicative of a tilting moment has crossed a predetermined threshold .
- the handling machine or the control method may comprise one or more of the following features.
- the selection member is configured to: select the reinforced operating mode in response to a first action of the operator on the selection member, and select the simple operating mode in response to a second action of the operator on the selection member.
- control unit is configured to select the enhanced operating mode in response to detecting that the main body has remained in a substantially stationary state for a duration greater than a predetermined duration threshold.
- One or more tests may be performed to detect that the main body is in a substantially immobile state, for example to detect the activation of a parking brake, the deactivation of a transmission (disengage by solenoid valve or electric control relay) the descent of the stabilizing feet 5 in support of the ground, or a condition based on the speed of movement of the main body.
- the machine further comprises a displacement speed sensor configured to measure a magnitude representative of a movement speed of the main body, and the control unit is configured to detect that the main body has remained in the substantially stationary state according to the magnitude representative of a movement speed of the main body.
- the control unit functions as an all-or-nothing filter that executes or allows execution of movement requests that satisfy an authorization criterion, but that prevents or cancels the execution of movement requests that do not satisfy not the authorization criterion. In doing so, the control unit does not need to modify the requests for movements issued by the operator, which leaves the latter effective control of these requests, particularly in terms of speed.
- the threshold representative of a maximum speed can be determined in various ways, in particular with a view to excluding movements involving an excessive amount of movement, namely a quantity of movement that the machine is not able to absorb or to dissipate without risk of creating instability.
- the machine further comprises a tilt moment indicative sensor for measuring a magnitude indicative of a tilting moment applied to the main body with respect to a tilting axis.
- the indicative tilt moment sensor comprises an extensometer, for example an extensometer sensitive to the deformations of an axle of the ground connection of the machine (variation in length between two terminals spaced apart on the axle) and / or the handling arm.
- the tilt moment indicative sensor comprises a pressure sensor in the actuating device of the arm, for example a pressure sensor arranged at a jack of the actuating device.
- the sensor indication of tipping moment may be a load cell as mentioned in EP-A-1532065 .
- the tilt moment indicative sensor may also be implemented in the form of a measuring system comprising a plurality of sensors measuring a plurality of physical quantities and a processing unit for combining these measurements in the form of a quantity indicative of the tilt moment.
- the machine further comprises a threshold determination module configured to determine the threshold representative of a maximum authorized speed as a function of a measurement signal produced by the indicative tilt moment sensor.
- the threshold representing a maximum authorized speed shows a decreasing trend when the tilting moment increases.
- the machine further comprises a control member operable by an operator to produce a motion request signal for influencing the actuating device to execute or stop movement of the handling arm by the device. actuating in response to the motion request signal.
- the indicative tilt moment sensor is arranged on an end portion of the main body turned away from the direction of movement executed or to be executed in response to the motion request signal, and the measured magnitude. by the indicative tilt moment sensor moves in the opposite direction of the tilting moment.
- Such an embodiment is for example illustrated by the case of an extensometer measuring the deformations of the rear axle of a handling vehicle in which the handling arm extends towards the front of the vehicle.
- the tilt moment indicative sensor is arranged on an end portion of the main body facing the direction of movement executed or to be executed in response to the motion request signal, and the magnitude measured by the sensor. tilt moment code changes in the same direction as the tilt moment.
- Such an embodiment is for example illustrated by the case of an extensometer measuring the deformations of the front axle of a handling vehicle in which the handling arm also extends towards the front of the vehicle.
- the movement of the handling arm executed by the actuating device can be of different types, for example a translation or rotation movement.
- the actuating device is configured to perform a pivoting of the handling arm about a substantially horizontal axis relative to the main body.
- the handling arm may have one or more degrees of freedom relative to the main body.
- the various actuators are not necessarily all controlled in the same way.
- the control methods described herein are preferably applied to the degree (s) of motion having a greater influence on the stability of the machine.
- the magnitude representative of the speed used for the control of the machine can be determined in different ways.
- the motion request signal has an attribute representative of a speed of the movement to be executed and the control member is operable by the operator to adjust the attribute of the motion request signal among a plurality of attribute values respectively representing a plurality of speed values and a stop state.
- control unit is configured to receive the motion request signal produced by the control member.
- control unit can take into account an attribute of the motion request signal, for example its amplitude, its frequency, its duration or any other predefined attribute, as a magnitude representative of the speed of the movement to be executed.
- the comparison made by the control unit is a comparison between the attribute of the motion request signal and said threshold.
- control member operable by the operator can be realized in different ways, for example in the form of a rocking lever, a button rotary, touch screen, or whatever.
- the operator actuatable control member is coupled to the control unit to provide the motion request signal to the control unit in the form of an electrical signal.
- the attribute of the motion request signal which represents the requested speed is a level of voltage, intensity, frequency or duration of the request signal.
- a control method implemented by the control unit comprises the step of receiving the motion request signal.
- control member producing the motion request signal is not necessarily connected to the control unit or the control unit is not necessarily configured to be able to receive this signal from the control unit. request for movement, for example if it is a purely mechanical signal.
- the handling machine further comprises measuring means for measuring an instantaneous speed of the handling arm relative to the main body.
- the comparison made by the control unit can be a comparison between said instantaneous speed and said threshold.
- an angular or linear speed sensor may be employed.
- a correlated magnitude at instantaneous speed of the handling arm can be measured, for example the speed of a moving part coupled to the handling arm or the like.
- the machine further comprises measuring means for measuring the hydraulic flow to be supplied to the hydraulic actuator as speed information.
- the comparison made by the control unit can be a comparison between the hydraulic flow and said threshold.
- the actuating device or devices of the handling arm can be made in different ways, for example in the form of one or more electric or hydraulic actuators.
- the actuation device comprises a hydraulic actuator and a variable flow device for adjusting a hydraulic flow to be supplied to the hydraulic actuator.
- a variable flow hydraulic device can be realized in different ways.
- variable flow device comprises a variable flow pump.
- the flow control member may influence an inclination angle of the inclined plate.
- the variable flow device comprises a proportional distributor.
- the flow control member may influence the position of a drawer.
- the operator operable control member is operably coupled, for example mechanically or hydraulically, to the variable flow device so as to move a flow control member of the variable flow device according to the action of the operator on the control organ.
- control unit is not necessarily able to prevent direct actuation of the variable flow device by the action of the operator on the control member and the production of a hydraulic flow resulting.
- the actuating device further comprises a solenoid valve arranged between the variable flow device and the hydraulic actuator, the solenoid valve being controllable by the control unit to prevent or stop the movement of the handling arm as soon as the magnitude representative of the speed of the movement executed or to be executed is greater than said threshold.
- the motion request signal may be a movement of the rate controlling member of the variable rate device.
- Such motion can be measured by a transducer and provided as an electrical signal to the control unit.
- the control unit can operate from a measurement of an actual movement of the handling arm rather than from a motion request signal.
- the solenoid valve is a progressive start valve.
- the use of a soft start valve allows a reliable measurement of the instantaneous speed of the handling arm to be achieved before the handling arm has acquired a large amount of movement, so that the cutting of the movement can intervene without excessive shock if the speed threshold is exceeded.
- the handling machine or the signaling method may include one or more of the following features.
- Some aspects of the invention are based on the idea of analyzing the energy state of a handling machine in a contribution of gravitational potential energy and a contribution of kinetic energy.
- potential energy the stability of the machine in the gravity field results in the positioning of the current state of the machine at the bottom of a potential well, which can be more or less deep depending on the mass and the position of the payload.
- kinetic energy the speed of movement of the handling arm relative to the main body results in a quantity of energy that can be transferred to the main body, with a higher or lower efficiency, in case of modification of the mechanical coupling between them, for example in case of sudden stop of the movement.
- An idea underlying the invention is to control and / or allow an operator to control that this kinetic energy does not cross a level of energy such that it becomes likely to get the handling machine out of the potential well translating its stable state.
- Embodiments of a handling machine in the form of a traveling telescopic carriage carrying a handling arm projecting towards the front of the vehicle will be described below.
- the risk of tipping occurs in the forward direction around the tilting axis formed by the front wheels of the vehicle. Therefore, the monitoring and control of this risk of tipping involve taking into account the inertial forces oriented in the forward direction, that is to say the movements involving a significant amount of movement in this direction.
- the tilting axis may be located differently. The movements to be taken into account will then have to be selected according to the situation of this axis.
- the telescopic wagon 1 comprises a frame 2 supported on the ground via a front axle 3 and a rear axle 4. Stabilizing feet 5 may be optionally deployed to lift the front axle 3, in which case the stabilizing feet 5 define the tilt axis forward.
- the frame 2 has a relatively high mass because of its construction and the mechanical elements that it carries, according to the known technique.
- the handling arm 6 is articulated to the frame 2 about a horizontal axis 7.
- a lifting actuator for example hydraulic cylinder 8, moves the handling arm 6 upwards and downwards about the horizontal axis 7, under the control of a control system.
- the control system comprises a control unit 10 and a control member 12 operable by an operator, which are schematically sketched on the figure 1 .
- the figure 1 illustrates the handling arm 6 and a payload 9 in a high position in solid lines and in several lower positions in the line interrupted. Other things being equal, the static tilting moment exerted by the handling arm 6 in the forward direction increases as its position descends horizontally.
- FIG. 1 illustrates an indicative tilt moment sensor 11 positioned at the rear axle, according to the known technique.
- the tilt moment indicative sensor 11 produces a measurement signal which represents a stability reserve of the handling machine 1 with respect to the tilting axis.
- a known method for monitoring and controlling the risk of tipping is to process the measurement signal of the tilt momentary indication sensor 11 by the control unit 10 to, on the one hand, display a visual stability gauge in the passenger compartment.
- the machine for example on a light display panel 13 disposed in the passenger compartment and, on the other hand, cut the downward movement of the handling arm 6 when the measurement signal becomes less than a predefined threshold.
- this method requires setting the threshold with a high margin of safety, which limits the capacity of the machine, and / or to control an automatic slowing down of the movement before the cut , which dispossesses the operator of the speed control.
- control system can implement control methods which will be described with reference to the Figures 2 and 3 . These control methods are based on the principle of allowing the operator to control the movement of the handling arm 6 by means of the control member 12.
- control system sets the speed of the movement to be executed according to a request. movement produced by the operator by actuating the control member 12, and in particular a quantitative quantity produced by the action of the operator on the control member 12 and representing a speed level requested by the operator.
- the quantitative quantity is an angle of inclination of a pivoting lever of the control member 12, wherein a higher angle represents a higher speed demand and a zero inclination angle (neutral position) represents a stop request.
- the control system immediately produces the stop of motion in response to the stop request produced by the operator.
- the figure 2 illustrates a control method using an effective speed measurement of the handling arm 6.
- the figure 3 illustrates a control method using a speed request produced by the operator. These methods can be executed in a loop by an electronic circuit.
- step 25 executing or continuing the execution of the movement in accordance with the motion request produced by the operator.
- step 26 stopping or preventing the movement of the handling arm 6, despite the request of the operator.
- This stopping or prevention reflects the fact that the operator has requested a speed of movement that is too high compared to the stability reserve available at the same time.
- the control system does not allow the execution of this request. In other words, if a movement was in progress, it stops immediately and if no movement was in progress, the stop state remains despite the request of the operator.
- a positive reset action by the operator before he can again issue a motion request, for example a new request with a lower speed level.
- This reset action is preferably executable by means of the control member 12, for ergonomic reasons.
- the reset action is to return the pivoting lever to the neutral position before re-tilting it forward.
- the authorized speed threshold read in step 22 may have been determined by tests. Qualitatively, this authorized speed threshold represents a momentum or a kinetic energy that the industrial truck 1 is able to absorb without tilting in the event of instantaneous stoppage of the movement of the handling arm 6. This authorized speed threshold therefore decreases at during a downward movement of the handling arm 6 as decreases the stability reserve indicated by the measurement of the sensor indicative of tilting moment 11. In another embodiment, the authorized speed threshold may have been determined by a calculation and stored or can be determined by a real-time calculation in step 22.
- control system Since the control system responds uniformly to a given motion request, and in particular does not modify the speed of movement executed in response to a given request, the operator is able to acquire by experience the machine's response and to be able to best adapt its demand according to the circumstances.
- step 25 If the requested speed is below the permissible speed threshold, step 25.
- step 26 If the requested speed is greater than the authorized speed threshold, step 26.
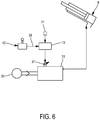
- control system for executing such a control method can be realized in different ways. Three exemplary embodiments will now be described with reference to Figures 4 to 6 .
- the control system is suitable for implementing the method of the figure 2 .
- the hydraulic jack 8 is shown, a hydraulic pressure source 30, a hydraulic distributor 31 interposed between them to control a hydraulic flow to be supplied to the hydraulic jack 8, the control member 12 in the form of a lever coupled directly to the hydraulic distributor slide 31, the control unit 10, the tilt moment indicative sensor 11 and the angular speed sensor 18 connected to the control unit 10, and a solenoid valve 32 interposed between the hydraulic distributor 31 and the jack 8.
- the solenoid valve 32 is controlled by the control unit 10.
- control unit can not prevent the opening of the hydraulic distributor 31 under the action of the operator when the speed is too high, it is the solenoid valve 32 which serves to interrupt the hydraulic flow. to immediately stop the movement at step 26.
- the solenoid valve 32 is a progressive start valve.
- the use of a progressive start valve allows that the eventual restart of the movement by the operator after the reset action can not take place too fast with respect to the speed measurement by the speed sensor 18.
- the hydraulic distributor 31 does not have a mechanical control directly connected to the control member 12, but it has a hydraulic control.
- the hydraulic flow 38 corresponding to the downward movement of the handling arm 6 can be obtained by sending a pilot pressure 36 into a control port 35.
- the control member 12 is coupled to a control valve 34 controlling this pilot pressure.
- the control unit 10 is configured to drive a solenoid valve 33 arranged between the control valve 34 and the control port 35.
- the control unit 10 can switch the valve 33 to return the hydraulic distributor 31 in neutral position.
- the solenoid valve 33 is a progressive start valve.
- control system is suitable for implementing the method of the figure 3 .
- the control member 12 generates electric demand signals 39 and the hydraulic distributor 31 is controlled by means of an electrical signal applied to a control port 37.
- the control unit 10 is interposed between the control unit 12 and the hydraulic distributor 31 and can therefore directly control the hydraulic distributor 31 in steps 25 and 26.
- a speed sensor of the handling arm 6 is not essential in this embodiment, since the control unit 10 can determining the requested speed directly from the request signal 39.
- the figure 7 represents a state machine operable by the control unit 10 to selectively activate the enhanced operation mode described above and a simple mode of operation.
- the state machine comprises a state "reinforced operating mode” in which the control unit 10 implements the reinforced operating mode described above to take account of inertial forces, in particular under conditions where the speed-based prediction of the inertial forces has a degree of accuracy due to the immobility of the chassis 2, and a state “simple operating mode” in which the control unit 10 implements a different operating mode , without taking into account the speed of movement of the arm of handling.
- the simple operating mode nevertheless ensures a certain stability of the telescopic truck.
- the control unit 10 implements a control method of the handling arm 6 which relies, for example, essentially on the tilt moment measurement, by executing the requested movement as long as the tilting moment is lower. to a predefined threshold, and stopping the movement as soon as the tilting moment crosses this threshold.
- the stopping condition is therefore the crossing of the threshold predefined by the measurement signal indicative of the switching moment.
- the sensor 11 positioned at the rear axle, its measurement signal (for example, the bending of a wheel support arm) will decrease as the moment of tilting increases.
- the stopping condition can therefore be more precisely the crossing of a threshold from below by the measurement signal of the sensor 11. It is understood that the movement requested can be a combination of movements and is not restricted to a unitary movement.
- a selector member 70 in the passenger compartment of the telescopic truck is intended to be actuated by the operator to select at his choice the reinforced operating mode and the simple operating mode. So, as indicated on the figure 7 since the state 72, the operator can exert a first action 74 on the selector member 70 to enter the state 73. Conversely, since the state 73, the operator can exert a second action 75 on the selector member 70 to enter the state 72.
- the first action 74 and the second action 75 may be identical actions, successive in time, for example in the case where the selector member 70 is a push button switching alternately in the state 72 and in the state 73 with each successive pressure it receives.
- first action 74 and the second action 75 may be different actions, for example in the case where the selector member 70 is a bistable member that can be selectively moved in a first stable position to go into the state 72 and in a second stable position to go into state 73.
- the figure 7 also shows that the control unit 10 in the state 73 continuously tests a return condition 76 to return to the state 72 as soon as the return condition 76 is satisfied.
- the return condition is based on the detection that the frame 2 of the telescopic truck is in a substantially stationary state for a duration greater than a predetermined threshold.
- a criterion that can be applied to detect the substantially stationary state is that the speed of movement of the frame 2 is less than a predefined threshold, for example 0.3 m / s.
- the control unit can measure a magnitude representative of the movement speed of the frame 2 and compares this magnitude with the predefined threshold.
- the duration threshold can be set according to the requirements of the given application, for example between 1s and 1000s, and preferably between 5s and 100s.
- the handling arm 6 may have other degrees of movement than the pivoting around the horizontal axis 7, in particular a linear degree of telescoping movement and a degree of pivoting of the tool around a horizontal axis 15.
- the control methods described above may be used to control one or more of these degrees of motion.
- the actuators responsible for performing the corresponding movements are not necessarily all controlled in the same way. It is understood that the movement requested may be a combination of movements and is not restricted to a unitary movement.
- hydraulic distributors 131, 231, 331 are electrically operated distributors.
- the same reference numbers as on the figure 6 are therefore used to designate identical or similar elements.
- stop motion methods described above can of course be applied to the lowering movement L-, as already described, but also to the extension movement T + and possibly to other movements.
- control unit 10 stops or automatically prevents movement, because the stop condition is satisfied, some degrees of movement may remain executable by the operator while others are prohibited.
- the lifting movement L + and the retracting movement T-remain executable since they contribute to reducing the tilting moment
- the degrees of motion remaining executable when the stopping condition of a movement is satisfied are not necessarily the same in the state 72 and in the state 73.
- the stopping condition of a motion of lowering L- is satisfied in the state 72 (selected reinforced operating mode)
- the rectification movements I + and lowering I- are also blocked, while these movements remain executable when the stopping condition of a movement lowering L- is satisfied in the state 73 (single operating mode selected).
- the figure 9 represents an embodiment of the rear axle 4 of the telescopic truck 1.
- the rear axle 4 comprises two wheel support arms 60 carrying the rear wheels 62.
- One of the wheel support arms 60 or each of them is equipped with an extensometer 61 arranged to measure deformations of the wheel support arm 60 in flexion. More specifically, the extensometer 61 measures the variation in length between two spaced terminals on the wheel support arm 60.
- the measurement signals of the extensometers 61 may be used to form the signal indicative of the tilting moment, for example as average of the two measurement signals. Alternatively, it is possible to use a single extensometer 61 to produce the signal indicative of the tilting moment.
- the rear axle 4 is oscillatingly connected to the frame 2 by means of a pivot 66 with a longitudinal axis passing through a central portion 65 of the axle.
- control unit can be made in different forms, unitarily or distributed, by means of hardware and / or software components.
- Usable hardware components are the ASIC specific integrated circuits, FPGA programmable logic networks or microprocessors.
- Software components can be written in different programming languages, for example C, C ++, Java or VHDL. This list is not exhaustive.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Transportation (AREA)
- Civil Engineering (AREA)
- Automation & Control Theory (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Operation Control Of Excavators (AREA)
- Control And Safety Of Cranes (AREA)
- Jib Cranes (AREA)
Abstract
Description
- L'invention se rapporte au domaine des machines de manutention comportant un corps principal, généralement destiné à être disposé sur le sol, au moins un bras de manutention destiné à recevoir une charge utile devant être déplacée, et un dispositif d'actionnement configuré pour exécuter un mouvement du bras de manutention par rapport au corps principal, et en particulier aux machines de manutention roulantes.
- Une telle machine peut notamment être réalisée sous la forme de chariot à bras télescopique, chariot élévateur, grue de levage, pelleteuse mécanique, chargeuse à godet ou autre.
- Dans le domaine des machines de manutention, certains pays ont décidé d'adopter des normes imposant aux constructeurs des exigences particulières en matière de surveillance et de contrôle de la stabilité de la machine en service.
- Les forces en jeu dans la stabilité d'une machine de manutention en service impliquent à la fois des forces gravitationnelles aussi appelées charges statiques, à savoir les poids du bras de manutention, de la charge utile, du corps principal et/ou d'autres éléments de la machine ; et des forces inertielles aussi appelées charges dynamiques, à savoir des accélérations transmises entre le bras de manutention, la charge utile, le corps principal et/ou d'autres éléments de la machine du fait des mouvements effectués en service, notamment les mouvements du bras de manutention et de la charge utile par rapport au corps principal.
- Une limitation des forces inertielles peut être intrinsèquement obtenue en restreignant la vitesse de mouvement des organes de la machine. Ainsi, la norme européenne EN 1459:1998 intitulée «Sécurité des chariots de manutentionChariots automoteurs à portée variable » impose de restreindre la vitesse de descente maximale du bras de manutention. En particulier, cette norme prévoit de limiter cette vitesse de sorte que l'arrêt soudain du bras de manutention chargé de la charge utile maximale ne puisse pas provoquer un basculement de la machine, tout en tolérant un soulèvement temporaire des roues arrière de la machine.
- Toutefois, imposer une limitation permanente de la vitesse s'opposerait à l'objectif d'efficacité de travail qui est recherché dans le domaine des machines de manutention. Une limitation permanente de la vitesse ne peut donc pas constituer une solution générale satisfaisante au problème de la surveillance et du contrôle de la stabilité des machines en service.
- Une autre solution bien connue pour réduire les forces inertielles exercées sur le corps principal par le bras de manutention et la charge utile consiste à ralentir automatiquement le mouvement du bras de manutention, en particulier lorsque celui-ci s'approche d'une position de fin du mouvement. Des solutions de ce type sont décrites notamment dans les
publications GB-A-1403046 US-A-4006347 ,EP-A-0059901 ,US-A-5333533 etEP-A-1532065 . - Toutefois, il existe des conditions de fonctionnement dans lesquelles les forces appliquées à une machine de manutention et notamment les forces inertielles sont difficiles à prévoir et à contrôler. En particulier, les déplacements de la machine au sol lorsqu'il s'agit d'une machine roulante sont susceptibles d'engendrer de multiples forces échappant au contrôle d'un système de commande du bras de manutention. Ainsi, la norme européenne EN 1459:1998 précitée indique qu'un risque de renversement de la machine existe malgré l'utilisation d'un dispositif de contrôle du moment de basculement dès lors que la machine roule dans une courbe, la machine roule sur une pente, la machine roule sur un terrain cahoteux ou qui présente des obstacles et des trous ou que la machine roule avec la charge en position élevée.
- Il est également connu qu'un basculement du chariot vers l'avant peut survenir lorsque le véhicule roulant freine, alors qu'il déplace une charge.
- Une idée à la base de l'invention est de fournir des procédés et systèmes de commande d'une machine de manutention qui permettent de préserver la stabilité de la machine, notamment par la prise en compte des forces inertielles, et qui ne limitent pas l'utilisabilité de la machine lorsque la prise en compte des forces inertielles est rendue imprécise ou inefficace en raison des conditions de fonctionnement.
- Pour cela, l'invention fournit une machine de manutention comportant :
un corps principal,
un bras de manutention destiné à recevoir une charge devant être déplacée,
un dispositif d'actionnement configuré pour exécuter un mouvement du bras de manutention par rapport au corps principal,
un capteur indicatif de moment de basculement sensible à une grandeur indicative d'un moment de basculement appliqué sur le corps principal par rapport à un axe de basculement,
une unité de commande configurée pour commander le dispositif d'actionnement de manière à arrêter ou empêcher un mouvement du bras de manutention exécuté ou demandé dès qu'une condition d'arrêt est satisfaite, la condition d'arrêt étant dépendante de la grandeur indicative du moment de basculement mesurée, et
un organe de sélection actionnable par un opérateur pour sélectionner un mode de fonctionnement simple et un mode de fonctionnement renforcé. - Selon un mode de réalisation, quand le mode de fonctionnement renforcé est sélectionné, la condition d'arrêt employée par l'unité de commande est aussi dépendante d'une grandeur représentative de la vitesse du mouvement du bras de manutention exécuté ou demandé,
et quand le mode de fonctionnement simple est sélectionné, la condition d'arrêt est indépendante de la grandeur représentative de la vitesse du mouvement du bras de manutention. - L'invention fournit également un procédé de commande pour commander un dispositif d'actionnement dans une machine de manutention comportant un corps principal mobile et un bras de manutention destiné à recevoir une charge devant être déplacée, le dispositif d'actionnement étant configuré pour exécuter un mouvement du bras de manutention par rapport au corps principal,
le procédé comportant : - mesurer une grandeur indicative d'un moment de basculement appliqué sur le corps principal par rapport à un axe de basculement, et
- arrêter ou empêcher un mouvement du bras de manutention exécuté ou demandé dès qu'une condition d'arrêt est satisfaite, la condition d'arrêt étant dépendante de la grandeur indicative du moment de basculement mesurée,
- et dans lequel, quand un mode de fonctionnement renforcé est sélectionné, la condition d'arrêt est aussi dépendante d'une grandeur représentative de la vitesse du mouvement du bras de manutention,
- et quand un mode de fonctionnement simple est sélectionné, la condition d'arrêt est indépendante de la grandeur représentative de la vitesse du mouvement du bras de manutention.
- Dans le mode de fonctionnement renforcé, l'unité de commande applique une condition d'arrêt qui dépend de la vitesse du mouvement du bras de manutention, ou d'une grandeur représentative de cette vitesse. Ceci permet de prendre en compte les forces inertielles susceptibles de survenir en raison de cette vitesse, en cas d'arrêt du mouvement. Différentes méthodes basées sur la vitesse peuvent être employées pour cette prise en compte. Ce mode de fonctionnement est particulièrement adapté aux conditions de fonctionnements dans lesquelles corps de la machine est immobile, car la détermination des forces inertielles peut être réalisée avec un degré de précision satisfaisant dans ce cas. En d'autres termes, il est alors possible de fixer des limites de vitesse réalistes pour interdire ou supprimer des mouvements du bras de manutention créant réellement un risque de basculement en cas d'arrêt.
- Quand le mode de fonctionnement simple est sélectionné, la condition d'arrêt est indépendante de la grandeur représentative de la vitesse du mouvement du bras de manutention. Ainsi, la commande du bras de manutention peut être réalisée de manière plus simple. Selon un mode de réalisation, quand le mode de fonctionnement simple est sélectionné, le procédé comporte en outre l'étape d'empêcher ou arrêter le mouvement du bras de manutention dès que la grandeur indicative d'un moment de basculement a franchi un seuil prédéterminé.
- Selon des modes de réalisation, la machine de manutention ou le procédé de commande peuvent comporter une ou plusieurs des caractéristiques suivantes.
- Selon un mode de réalisation, l'organe de sélection est configuré pour : sélectionner le mode de fonctionnement renforcé en réponse à une première action de l'opérateur sur l'organe de sélection, et sélectionner le mode de fonctionnement simple en réponse à une deuxième action de l'opérateur sur l'organe de sélection.
- Selon un mode de réalisation, l'unité de commande est configurée pour sélectionner le mode de fonctionnement renforcé en réponse la détection de ce que le corps principal est resté dans un état sensiblement immobile pendant une durée supérieure à un seuil de durée prédéterminé.
- Un ou plusieurs tests peuvent être effectués pour détecter que le corps principal est dans un état sensiblement immobile, par exemple pour détecter l'activation d'un frein de parc, la désactivation d'une transmission (débrayage par électrovanne ou relais de commande électrique) la descente des pieds stabilisateurs 5 en appui au sol, ou une condition basée sur la vitesse de déplacement du corps principal.
- Selon un mode de réalisation, la machine comporte en outre un capteur de vitesse de déplacement configuré pour mesurer une grandeur représentative d'une vitesse de déplacement du corps principal, et
l'unité de commande est configurée pour détecter que le corps principal est resté dans l'état sensiblement immobile en fonction de la grandeur représentative d'une vitesse de déplacement du corps principal. - Selon un mode de réalisation, quand le mode de fonctionnement renforcé est sélectionné, l'unité de commande est configurée pour déterminer un seuil représentatif d'une vitesse maximale autorisée en fonction de la grandeur indicative du moment de basculement,
comparer la grandeur représentative de la vitesse du mouvement exécuté ou à exécuter au seuil représentatif d'une vitesse maximale autorisée et
commander le dispositif d'actionnement en fonction du résultat de ladite comparaison, de manière à : - exécuter ou continuer le mouvement du bras de manutention tant que la grandeur représentative de la vitesse du mouvement exécuté ou à exécuter est inférieure audit seuil, et
- empêcher ou arrêter le mouvement du bras de manutention dès que la grandeur représentative de la vitesse du mouvement exécuté ou à exécuter est supérieure audit seuil.
- Grâce à ces caractéristiques, dans le mode de fonctionnement renforcé, un mouvement du bras de manutention exécuté par la machine est toujours exécuté conformément à la demande de mouvement produite par l'opérateur, mais ce mouvement n'est pas exécuté ou se voit interrompu lorsque la demande de l'opérateur conduit ou conduirait au dépassement d'un seuil représentatif d'une vitesse maximale autorisée. En d'autres termes, l'unité de commande fonctionne comme un filtre tout ou rien qui exécute ou laisse exécuter les demandes de mouvements qui satisfont un critère d'autorisation, mais qui empêche ou annule l'exécution des demandes de mouvement qui ne satisfont pas le critère d'autorisation. Ce faisant, l'unité de commande n'a pas besoin de modifier les demandes de mouvements émises par l'opérateur, ce qui laisse à celui-ci le contrôle effectif de ces demandes, en particulier en termes de vitesse.
- Le seuil représentatif d'une vitesse maximale peut être déterminé de différentes manières, notamment en vue d'exclure des mouvements impliquant une quantité de mouvement trop élevée, à savoir une quantité de mouvement que la machine n'est pas en mesure d'absorber ou de dissiper sans risque de créer une instabilité.
- Selon un mode de réalisation, la machine comporte en outre un capteur indicatif de moment de basculement pour mesurer une grandeur indicative d'un moment de basculement appliqué sur le corps principal par rapport à un axe de basculement.
- L'utilisation d'un tel capteur indicatif de moment de basculement permet à l'unité de commande de prendre en compte une information relative au moment de basculement à un instant donné. Un tel capteur indicatif de moment de basculement peut être agencé de différentes manières pour mesurer différentes grandeurs. Selon un mode de réalisation, le capteur indicatif de moment de basculement comporte un extensomètre, par exemple un extensomètre sensible aux déformations d'un essieu de la liaison au sol de la machine (variation de longueur entre deux bornes espacées sur l'essieu) et/ou du bras de manutention. Selon un mode de réalisation, le capteur indicatif de moment de basculement comporte un capteur de pression dans le dispositif d'actionnement du bras, par exemple un capteur de pression agencé au niveau d'un vérin du dispositif d'actionnement. Selon un autre exemple, le capteur indicatif de moment de basculement peut être une cellule de charge telle que mentionnée dans
EP-A-1532065 . Le capteur indicatif de moment de basculement peut aussi être réalisé sous la forme d'un système de mesure comportant plusieurs capteurs mesurant plusieurs grandeurs physiques et une unité de traitement pour combiner ces mesures sous la forme d'une grandeur indicative du moment de basculement. - Selon un mode de réalisation, la machine comporte en outre un module de détermination de seuil configuré pour déterminer le seuil représentatif d'une vitesse maximale autorisée en fonction d'un signal de mesure produit par le capteur indicatif de moment de basculement. Selon un mode de réalisation, le seuil représentatif d'une vitesse maximale autorisée présente une évolution décroissante quand le moment de basculement augmente.
- Selon un mode de réalisation, la machine comporte en outre un organe de contrôle actionnable par un opérateur pour produire un signal de demande de mouvement destiné à influencer le dispositif d'actionnement pour faire exécuter ou faire arrêter un mouvement du bras de manutention par le dispositif d'actionnement en réponse au signal de demande de mouvement.
- Selon un mode de réalisation, le capteur indicatif de moment de basculement est agencé sur une portion d'extrémité du corps principal tournée à l'opposé du sens du mouvement exécuté ou à exécuter en réponse au signal de demande de mouvement, et la grandeur mesurée par le capteur indicatif de moment de basculement évolue en sens opposé du moment de basculement. Un tel mode de réalisation est par exemple illustré par le cas d'un extensomètre mesurant les déformations de l'essieu arrière d'un véhicule de manutention dans lequel le bras de manutention s'étend vers l'avant du véhicule.
- Selon un mode de réalisation, le capteur indicatif de moment de basculement est agencé sur une portion d'extrémité du corps principal tournée vers le sens du mouvement exécuté ou à exécuter en réponse au signal de demande de mouvement, et la grandeur mesurée par le capteur indicatif de moment de basculement évolue dans le même sens que le moment de basculement. Un tel mode de réalisation est par exemple illustré par le cas d'un extensomètre mesurant les déformations de l'essieu avant d'un véhicule de manutention dans lequel le bras de manutention s'étend aussi vers l'avant du véhicule.
- Le mouvement du bras de manutention exécuté par le dispositif d'actionnement peut être de différents types, par exemple un mouvement de translation ou de rotation. Selon un mode de réalisation préféré, le dispositif d'actionnement est configuré pour exécuter un pivotement du bras de manutention autour d'un axe sensiblement horizontal par rapport au corps principal.
- Le bras de manutention peut présenter un ou plusieurs degrés de liberté par rapport au corps principal. Lorsque plusieurs degrés de mouvement existent avec plusieurs dispositifs d'actionnement associés à ces degrés de mouvement respectifs, les différents dispositifs d'actionnement ne sont pas forcément tous commandés de la même manière. En particulier, les procédés de commande décrits ici sont de préférence appliqués au(x) degré(s) de mouvement ayant une plus grande influence sur la stabilité de la machine.
- La grandeur représentative de la vitesse exploitée pour la commande de la machine peut être déterminée de différentes manières.
- Selon un mode de réalisation, le signal de demande de mouvement présente un attribut représentatif d'une vitesse du mouvement à exécuter et l'organe de contrôle est actionnable par l'opérateur pour régler l'attribut du signal de demande de mouvement parmi une pluralité de valeurs d'attribut représentant respectivement une pluralité de valeurs de vitesse et un état d'arrêt.
- Selon un mode de réalisation, l'unité de commande est configurée pour recevoir le signal de demande de mouvement produit par l'organe de contrôle. Dans ce cas, l'unité de commande peut prendre en compte un attribut du signal de demande de mouvement, par exemple son amplitude, sa fréquence, sa durée ou tout autre attribut prédéfini, en tant que grandeur représentative de la vitesse du mouvement à exécuter. Selon un mode de réalisation, la comparaison effectuée par l'unité de commande est une comparaison entre l'attribut du signal de demande de mouvement et ledit seuil.
- L'organe de contrôle actionnable par l'opérateur peut être réalisé de différentes manières, par exemple sous la forme d'un levier basculant, d'un bouton rotatif, d'un écran tactile, ou autre. Selon un mode de réalisation, l'organe de contrôle actionnable par l'opérateur est couplé à l'unité de commande pour fournir le signal de demande de mouvement à l'unité de commande sous la forme d'un signal électrique. Par exemple, l'attribut du signal de demande de mouvement qui représente la vitesse demandée est un niveau de tension, d'intensité, de fréquence ou de durée du signal de demande.
- Selon un mode de réalisation, un procédé de commande mis en oeuvre par l'unité de commande comporte l'étape de recevoir le signal de demande de mouvement.
- Selon d'autres modes de réalisation, l'organe de contrôle produisant le signal de demande de mouvement n'est pas forcément relié à l'unité de commande ou l'unité de commande n'est pas forcément configurée pour pouvoir recevoir ce signal de demande de mouvement, par exemple s'il s'agit d'un signal purement mécanique.
- Selon un mode de réalisation pouvant être utilisé dans ce cas, la machine de manutention comporte en outre des moyens de mesure pour mesurer une vitesse instantanée du bras de manutention par rapport au corps principal. Dans ce cas, la comparaison effectuée par l'unité de commande peut être une comparaison entre ladite vitesse instantanée et ledit seuil.
- Différentes méthodes peuvent être utilisées pour mesurer une vitesse instantanée du bras de manutention par rapport au corps principal. Selon une méthode plus directe, un capteur de vitesse angulaire ou linéaire peut être employé. Selon une méthode plus indirecte, une grandeur corrélée à vitesse instantanée du bras de manutention peut être mesurée, par exemple la vitesse d'une pièce mobile couplée au bras de manutention ou autre. Selon un mode de réalisation, dans lequel le dispositif d'actionnement comporte un actionneur hydraulique, la machine comporte en outre des moyens de mesure pour mesurer le débit hydraulique à fournir à l'actionneur hydraulique en tant qu'information de vitesse. Dans ce cas, la comparaison effectuée par l'unité de commande peut être une comparaison entre le débit hydraulique et ledit seuil.
- Le ou les dispositifs d'actionnement du bras de manutention peuvent être réalisés de différentes manières, par exemple sous la forme d'un ou plusieurs actionneurs électriques ou hydrauliques.
- Selon un mode de réalisation, le dispositif d'actionnement comporte un actionneur hydraulique et un dispositif à débit variable pour régler un débit hydraulique à fournir à l'actionneur hydraulique. Un tel dispositif hydraulique à débit variable peut être réalisé de différentes manières.
- Selon un mode de réalisation le dispositif à débit variable comporte une pompe à débit variable. Par exemple, dans une pompe à plateau incliné, l'organe de réglage de débit peut influencer un angle d'inclinaison du plateau incliné. Selon un mode de réalisation, le dispositif à débit variable comporte un distributeur proportionnel. Par exemple, dans un distributeur proportionnel, l'organe de réglage de débit peut influencer la position d'un tiroir.
- Selon un mode de réalisation l'organe de contrôle actionnable par l'opérateur est fonctionnellement couplé, par exemple mécaniquement ou hydrauliquement, au dispositif à débit variable de manière à déplacer un organe de réglage de débit du dispositif à débit variable en fonction de l'action de l'opérateur sur l'organe de contrôle.
- Dans un tel cas, l'unité de commande n'est pas forcément en mesure d'empêcher un actionnement direct du dispositif à débit variable par l'action de l'opérateur sur l'organe de contrôle et la production d'un flux hydraulique résultant.
- Selon un mode de réalisation pouvant être utilisé dans ce cas, le dispositif d'actionnement comporte en outre une électrovanne agencée entre le dispositif à débit variable et l'actionneur hydraulique, l'électrovanne étant pilotable par l'unité de commande pour empêcher ou arrêter le mouvement du bras de manutention dès que la grandeur représentative de la vitesse du mouvement exécuté ou à exécuter est supérieure audit seuil.
- Dans un tel mode de réalisation, le signal de demande de mouvement peut être un mouvement de l'organe de réglage de débit du dispositif à débit variable. Un tel mouvement peut être mesuré par un transducteur et fourni sous la forme d'un signal électrique à l'unité de commande. Toutefois, il n'est pas toujours possible ou souhaitable de prévoir un tel transducteur dans le dispositif à débit variable, notamment pour des raisons tenant à l'encombrement ou au coût du dispositif à débit variable. En l'absence d'un tel transducteur, le signal de demande de mouvement ne peut pas facilement être fourni à l'unité de commande. Dans ces cas, l'unité de commande peut fonctionner à partir d'une mesure d'un mouvement effectif du bras de manutention plutôt qu'à partir d'un signal de demande de mouvement.
- Dans un mode de réalisation préféré, l'électrovanne est une vanne de démarrage progressif. L'utilisation d'une vanne de démarrage progressif permet qu'une mesure fiable de la vitesse instantanée du bras de manutention puisse être obtenue avant que le bras de manutention n'ait acquis une forte quantité de mouvement, de sorte que la coupure du mouvement puisse intervenir sans choc excessif en cas de dépassement du seuil de vitesse autorisée.
- Selon des modes de réalisation, la machine de manutention ou le procédé de signalisation peuvent comporter une ou plusieurs des caractéristiques suivantes.
- Certains aspects de l'invention reposent sur l'idée d'analyser l'état énergétique d'une machine de manutention en une contribution d'énergie potentielle de pesanteur et une contribution d'énergie cinétique. En termes d'énergie potentielle, la stabilité de la machine dans le champ de gravité se traduit par le positionnement de l'état actuel de la machine au fond d'un puits de potentiel, lequel peut être plus ou moins profond selon la masse et la position de la charge utile. En termes d'énergie cinétique, la vitesse de mouvement du bras de manutention par rapport au corps principal se traduit par une quantité d'énergie susceptible d'être transférée au corps principal, avec un rendement plus ou moins élevé, en cas de modification du couplage mécanique entre eux, par exemple en cas d'arrêt soudain du mouvement. Une idée à la base de l'invention est de contrôler et/ou permettre à un opérateur de contrôler que cette énergie cinétique ne franchit pas un niveau d'énergie tel qu'il devienne susceptible faire sortir la machine de manutention du puits de potentiel traduisant son état stable.
- L'invention sera mieux comprise, et d'autres buts, détails, caractéristiques et avantages de celle-ci apparaîtront plus clairement au cours de la description suivante de plusieurs modes de réalisation particuliers de l'invention, donnés uniquement à titre illustratif et non limitatif, en référence aux dessins annexés.
- La
figure 1 est une représentation schématique d'un chariot télescopique dans lequel des modes de réalisation de l'invention peuvent être mis en oeuvre. - La
figure 2 est un diagramme d'étape représentant un procédé de commande selon un premier mode de réalisation du mode de fonctionnement renforcé pouvant être utilisé dans le chariot télescopique. - La
figure 3 est un diagramme d'étape représentant un procédé de commande selon un deuxième mode de réalisation du mode de fonctionnement renforcé pouvant être utilisé dans le chariot télescopique. - La
figure 4 est une représentation schématique d'un dispositif d'actionnement hydraulique selon un premier mode de réalisation pouvant être utilisé dans le chariot télescopique. - La
figure 5 est une représentation schématique d'un dispositif d'actionnement hydraulique selon un deuxième mode de réalisation pouvant être utilisé dans le chariot télescopique. - La
figure 6 est une représentation schématique d'un dispositif d'actionnement hydraulique selon un troisième mode de réalisation pouvant être utilisé dans le chariot télescopique. - La
figure 7 est un diagramme représentant une machine à états pouvant être utilisée dans le chariot télescopique. - La
figure 8 est une représentation schématique d'un dispositif d'actionnement hydraulique selon un quatrième mode de réalisation pouvant être utilisé dans le chariot télescopique. - La
figure 9 est une représentation schématique d'un bras de support de roue équipé d'un extensomètre pouvant servir de capteur indicatif de moment de basculement. - On va décrire ci-dessous des modes de réalisation d'une machine de manutention sous la forme d'un chariot télescopique roulant portant un bras de manutention saillant vers l'avant du véhicule. Dans cette configuration le risque de basculement se présente dans la direction avant autour de l'axe de basculement formé par les roues avant du véhicule. Dès lors, la surveillance et le contrôle de ce risque de basculement impliquent de prendre en compte les forces inertielles orientées dans la direction avant, c'est-à-dire les mouvements impliquant une quantité de mouvement non négligeable dans cette direction.
- Dans une machine de manutention présentant une configuration différente, l'axe de basculement peut être situé différemment. Les mouvements à prendre en compte devront alors être sélectionnés en fonction de la situation de cet axe.
- En référence à la
figure 1 , le chariot télescopique 1 comporte un châssis 2 supporté sur le sol par l'intermédiaire d'un essieu avant 3 et un essieu arrière 4. Des pieds stabilisateurs 5 peuvent être optionnellement déployés pour soulever l'essieu avant 3, auquel cas les pieds stabilisateurs 5 définissent l'axe de basculement vers l'avant. Le châssis 2 présente une masse relativement élevée du fait de sa construction et des éléments mécaniques qu'il porte, selon la technique connue. - Le bras de manutention 6 est articulé au châssis 2 autour d'un axe horizontal 7. Un actionneur de levage, par exemple vérin hydraulique 8, permet de déplacer le bras de manutention 6 vers le haut et vers le bas autour de l'axe horizontal 7, sous la conduite d'un système de commande. Le système de commande comporte une unité de commande 10 et un organe de contrôle 12 actionnable par un opérateur, qui sont schématiquement esquissés sur la
figure 1 . - La
figure 1 illustre le bras de manutention 6 et une charge utile 9 dans une position haute en trait continu et dans plusieurs positions plus basses en trait interrompu. Toutes choses égales par ailleurs, le moment de basculement statique exercé par le bras de manutention 6 dans la direction avant augmente à mesure que sa position descend vers l'horizontale. - Une mesure indicative de ce moment de basculement statique peut être obtenue à l'aide d'un capteur indicatif de moment de basculement pouvant être positionné de différentes manières. La
figure 1 illustre un capteur indicatif de moment de basculement 11 positionné au niveau de l'essieu arrière, selon la technique connue. - Le capteur indicatif de moment de basculement 11 produit un signal de mesure qui représente une réserve de stabilité de la machine de manutention 1 par rapport à l'axe de basculement.
- Une méthode connue pour surveiller et contrôler le risque de basculement consiste à traiter le signal de mesure du capteur indicatif de moment de basculement 11 par l'unité de commande 10 pour, d'une part afficher une jauge de stabilité visuelle dans l'habitacle de la machine, par exemple sur un tableau d'affichage lumineux 13 disposé dans l'habitacle et, d'autre part, couper le mouvement de descente du bras de manutention 6 lorsque le signal de mesure devient inférieur à un seuil prédéfini. Toutefois, du fait des forces inertielles engendrées par la coupure du mouvement, cette méthode nécessite de fixer le seuil avec une marge de sécurité élevée, ce qui limite les capacités de la machine, et/ou de commander un ralentissement automatique du mouvement avant la coupure, ce qui dépossède l'opérateur du contrôle de la vitesse.
- Pour éviter cela, dans un mode de fonctionnement renforcé, le système de commande peut mettre en oeuvre des procédés de commande qui vont être décrits en référence aux
figures 2 et 3 . Ces procédés de commande reposent sur le principe de laisser l'opérateur piloter le mouvement du bras de manutention 6 au moyen de l'organe de contrôle 12. En particulier le système de commande règle la vitesse du mouvement à exécuter en fonction d'une demande de mouvement produite par l'opérateur en actionnant l'organe de contrôle 12, et en particulier d'une grandeur quantitative produite par l'action de l'opérateur sur l'organe de contrôle 12 et représentant un niveau de vitesse demandé par l'opérateur. Par exemple, la grandeur quantitative est un angle d'inclinaison d'un levier pivotant de l'organe de contrôle 12, dans lequel un angle plus élevé représente une demande de vitesse plus élevée et un angle d'inclinaison nul (position neutre) représente une demande d'arrêt. Le système de commande produit immédiatement l'arrêt du mouvement en réponse à la demande d'arrêt produite par l'opérateur. - La
figure 2 illustre un procédé de commande utilisant une mesure de vitesse effective du bras de manutention 6. Lafigure 3 illustre un procédé de commande utilisant une demande de vitesse produite par l'opérateur. Ces procédés peuvent être exécutés en boucle par un circuit électronique. - Le procédé de la
figure 2 comporte les étapes suivantes : - Étape 21 : acquisition du signal de mesure du capteur indicatif de moment de basculement 11
- Étape 22 : détermination d'un seuil de vitesse autorisée en fonction du signal de mesure. Cette détermination peut reposer sur la lecture d'une table stockée dans une mémoire et contenant des valeurs de seuil associées à des valeurs du signal de mesure ou à des plages de valeur du signal de mesure.
- Étape 23 : acquisition du signal de mesure d'un capteur de vitesse du bras de manutention 6. Ce capteur de vitesse est par exemple un capteur de vitesse angulaire 18 esquissé sur la
figure 1 . - Étape 24 : comparaison de la vitesse du bras de manutention 6 avec le seuil de vitesse autorisée.
- Si la vitesse mesurée est inférieure au seuil de vitesse autorisée, étape 25 : exécution ou poursuite de l'exécution du mouvement conformément à la demande de mouvement produite par l'opérateur.
- Si la vitesse mesurée est supérieure au seuil de vitesse autorisée, étape 26: arrêt ou empêchement du mouvement du bras de manutention 6, malgré la demande de l'opérateur. Cet arrêt ou empêchement traduit le fait que l'opérateur a demandé une vitesse de mouvement trop élevée par rapport à la réserve de stabilité disponible au même instant. Le système de commande n'autorise pas l'exécution de cette demande. En d'autres termes, si un mouvement était en cours, il s'arrête immédiatement et si aucun mouvement n'était en cours, l'état d'arrêt subsiste malgré la demande de l'opérateur.
- A partir de l'état d'arrêt produit à l'étape 26, il est préférable d'exiger une action positive de réinitialisation par l'opérateur avant qu'il puisse à nouveau émettre une demande de mouvement, par exemple une nouvelle demande avec un niveau de vitesse plus faible. Cette action de réinitialisation est de préférence exécutable au moyen de l'organe de contrôle 12, par mesure d'ergonomie. Par exemple l'action de réinitialisation consiste à ramener le levier pivotant dans la position neutre avant de le ré-incliner vers l'avant.
- Le seuil de vitesse autorisée lu à l'étape 22 peut avoir été déterminé par des essais. Qualitativement ce seuil de vitesse autorisée représente une quantité de mouvement ou une énergie cinétique que le chariot de manutention 1 est capable d'absorber sans basculement en cas d'arrêt instantané du mouvement du bras de manutention 6. Ce seuil de vitesse autorisée décroît donc au cours d'un mouvement de descente du bras de manutention 6 comme décroît la réserve de stabilité indiquée par la mesure du capteur indicatif de moment de basculement 11. Dans un autre mode de réalisation, le seuil de vitesse autorisée peut avoir été déterminé par un calcul et mémorisé ou peut être déterminé par un calcul en temps réel à l'étape 22.
- Un effet du procédé de commande décrit ci-dessus est donc que, en partant de la position haute illustrée sur la
figure 1 , si l'opérateur produit une demande de mouvement de descente constante, le mouvement est exécuté à vitesse constante tant que le seuil de vitesse autorisée reste supérieur à cette vitesse et s'interrompt instantanément lorsque le seuil de vitesse autorisée est dépassé. - Comme le système de commande réagit de manière uniforme à une demande de mouvement donnée, et en particulier ne modifie pas la vitesse de mouvement exécutée en réponse à une demande donnée, l'opérateur est mis en mesure d'acquérir par l'expérience une connaissance fine de la réponse de la machine et d'être capable d'adapter au mieux sa demande en fonction des circonstances.
- Sur la
figure 3 , les étapes modifiées par rapport au procédé de lafigure 2 portent le même chiffre de référence augmenté de 100. Les étapes inchangées portent le même chiffre et ne sont pas décrites à nouveau. - Étape 28 : acquisition du signal de demande de mouvement produit par l'opérateur, par exemple sous la forme d'un signal électrique
- Étape 123 : détermination d'une vitesse de mouvement demandée en fonction du signal de demande de mouvement. Par exemple la vitesse demandée est encodée dans l'amplitude ou un autre attribut du signal de demande de mouvement.
- Étape 124 : comparaison de la vitesse de mouvement demandée avec le seuil de vitesse autorisée.
- Si la vitesse demandée est inférieure au seuil de vitesse autorisée, étape 25.
- Si la vitesse demandée est supérieure au seuil de vitesse autorisée, étape 26.
- On appréciera que dans ces procédés, aucun autre mouvement n'est exécuté qu'un mouvement conforme à la demande de mouvement produite par l'opérateur.
- Le système de commande permettant d'exécuter un tel procédé de commande peut être réalisé de différentes manières. Trois exemples de réalisation vont maintenant être décrits en référence aux
figures 4 à 6 . - Sur la
figure 4 , le système de commande convient pour mettre en oeuvre le procédé de lafigure 2 . On a représenté le vérin hydraulique 8, une source de pression hydraulique 30, un distributeur hydraulique 31 intercalé entre eux pour contrôler un débit hydraulique à fournir au vérin hydraulique 8, l'organe de contrôle 12 sous la forme d'un levier couplé directement au tiroir du distributeur hydraulique 31, l'unité de commande 10, le capteur indicatif de moment de basculement 11 et le capteur de vitesse angulaire 18 reliés à l'unité de commande 10, et une électrovanne 32 intercalée entre le distributeur hydraulique 31 et le vérin hydraulique 8. L'électrovanne 32 est pilotée par l'unité de commande 10. - Dans ce système, comme l'unité de commande ne peut pas empêcher l'ouverture du distributeur hydraulique 31 sous l'action de l'opérateur lorsque la vitesse est trop élevée, c'est l'électrovanne 32 qui sert à interrompre le flux hydraulique pour arrêter immédiatement le mouvement à l'étape 26.
- De préférence, l'électrovanne 32 est une vanne de démarrage progressif. L'utilisation d'une vanne de démarrage progressif permet que le redémarrage éventuel du mouvement par l'opérateur après l'action de réinitialisation ne puisse pas avoir lieu trop vite par rapport à la mesure de vitesse par le capteur de vitesse 18.
- Sur la
figure 5 , les éléments similaires ou identiques à ceux de lafigure 4 portent le même chiffre de référence. Dans ce mode de réalisation, le distributeur hydraulique 31 ne présente pas une commande mécanique liée directement à l'organe de contrôle 12, mais il présente une commande hydraulique. En particulier, le flux hydraulique 38 correspondant au mouvement de descente du bras de manutention 6 peut être obtenu en envoyant une pression pilote 36 dans un port de commande 35. - L'organe de contrôle 12 est couplé à une vanne de commande 34 contrôlant cette pression pilote. L'unité de commande 10 est configurée pour piloter une électrovanne 33 agencée entre la vanne de commande 34 et le port de commande 35. Ainsi à l'étape 26, l'unité de commande 10 peut commuter la vanne 33 pour ramener le distributeur hydraulique 31 en position neutre. De préférence, l'électrovanne 33 est une vanne de démarrage progressif.
- Sur la
figure 6 , le système de commande convient pour mettre en oeuvre le procédé de lafigure 3 . L'organe de contrôle 12 produit des signaux de demande électriques 39 et le distributeur hydraulique 31 est pilotée à l'aide d'un signal électrique appliqué sur un port de commande 37. L'unité de commande 10 est intercalée entre l'organe de contrôle 12 et le distributeur hydraulique 31 et peut donc commander directement le distributeur hydraulique 31 aux étapes 25 et 26. Un capteur de vitesse du bras de manutention 6 n'est pas indispensable dans ce mode de réalisation, puisque l'unité de commande 10 peut déterminer la vitesse demandée directement à partir du signal de demande 39. - La
figure 7 représente une machine à états pouvant être mise en oeuvre par l'unité de commande 10 pour activer sélectivement le mode de fonctionnement renforcé décrit ci-dessus et un mode de fonctionnement simple. - Plus précisément, la machine à états comporte un état 72 « mode de fonctionnement renforcé » dans lequel l'unité de commande 10 met en oeuvre le mode de fonctionnement renforcé décrit ci-dessus pour tenir compte de forces inertielles, en particulier dans des conditions où la prédiction des forces inertielles basée sur la vitesse présente un degré de précision du fait de l'immobilité du châssis 2, et un état 73 « mode de fonctionnement simple » dans lequel l'unité de commande 10 met en oeuvre un mode de fonctionnement différent, sans prise en compte de la vitesse de mouvement du bras de manutentions. Le mode de fonctionnement simple assure néanmoins une certaine stabilité du chariot télescopique.
- Dans l'état 73, l'unité de commande 10 met en oeuvre un procédé de commande du bras de manutention 6 qui repose par exemple essentiellement sur la mesure de moment de basculement, en exécutant le mouvement demandé tant que le moment de basculement est inférieur à un seuil prédéfini, et en arrêtant le mouvement dès que le moment de basculement franchit ce seuil. La condition d'arrêt est donc le franchissement du seuil prédéfini par le signal de mesure indicatif du moment de basculement. En ce qui concerne le capteur 11 positionné au niveau de l'essieu arrière, son signal de mesure (traduisant par exemple la flexion d'un bras de support de roue) va diminuer à mesure que le moment de basculement augmente. La condition d'arrêt peut donc être plus précisément le franchissement d'un seuil par le bas par le signal de mesure du capteur 11. Il s'entend que le mouvement demandé peut être une combinaison de mouvements et n'est pas restreint à un mouvement unitaire.
- De retour à la
figure 1 , on a représenté un organe sélecteur 70 dans l'habitacle du chariot télescopique. L'organe sélecteur 70 est destiné à être actionné par l'opérateur pour sélectionner à son choix le mode de fonctionnement renforcé et le mode de fonctionnement simple. Ainsi, comme indiqué sur lafigure 7 , depuis l'état 72, l'opérateur peut exercer une première action 74 sur l'organe sélecteur 70 pour passer dans l'état 73. Réciproquement, depuis l'état 73, l'opérateur peut exercer une deuxième action 75 sur l'organe sélecteur 70 pour passer dans l'état 72. Selon la réalisation concrète de l'organe sélecteur 70, la première action 74 et la deuxième action 75 peuvent être des actions identiques, successives dans le temps, par exemple dans le cas où l'organe sélecteur 70 est un bouton poussoir commutant alternativement dans l'état 72 et dans l'état 73 à chaque pression successive qu'il reçoit. Inversement la première action 74 et la deuxième action 75 peuvent être des actions différentes, par exemple dans le cas où l'organe sélecteur 70 est un organe bistable pouvant être déplacé sélectivement dans une première position stable pour passer dans l'état 72 et dans une deuxième position stable pour passer dans l'état 73. - La
figure 7 montre aussi que l'unité de commande 10 dans l'état 73 teste en permanence une condition de retour 76 pour revenir à l'état 72 dès que la condition de retour 76 est satisfaite. - La condition de retour est fondée sur la détection que le châssis 2 du chariot télescopique est dans un état sensiblement immobile depuis une durée supérieure à un seuil prédéterminé. Un critère pouvant être appliqué pour détecter l'état sensiblement immobile est que la vitesse de déplacement du châssis 2 soit inférieure à un seuil prédéfini, par exemple 0,3 m/s. Pour tester la condition de retour 76, l'unité de commande peut mesurer une grandeur représentative de la vitesse de déplacement du châssis 2 et compare cette grandeur au seuil prédéfini.
- La condition de retour 76 peut aussi comporter plusieurs conditions alternatives ou cumulatives impliquant que le corps de la machine est sensiblement immobile. Dans un mode de réalisation, la condition de retour 76 est aussi satisfaite dès que l'un des événements suivants est détecté :
- activation d'un frein de parc,
- désactivation d'une transmission (débrayage par électrovanne ou relais de commande électrique),
- descente des pieds stabilisateurs 5 en appui au sol, manifestant l'intention de stabiliser la machine en soulevant les roues du sol.
- De nombreuses techniques sont utilisables pour mesurer une grandeur représentative de la vitesse de déplacement du châssis 2, par exemple en exploitant les mesures fournies par un ou plusieurs capteurs de vitesse de roues 71, qui sont illustrés schématiquement sur la
figure 1 . - Le seuil de durée peut être fixé en fonction des exigences de l'application donnée, par exemple entre 1s et 1000s, et de préférence entre 5s et 100s.
- D'autres systèmes de commande peuvent être conçus selon la nature de l'actionneur à commander. Le bras de manutention 6 peut présenter d'autres degrés de mouvement que le pivotement autour de l'axe horizontal 7, notamment un degré de mouvement linéaire en télescopage et un degré de pivotement de l'outil autour d'un axe horizontal 15. Les procédés de commandes décrits ci-dessus peuvent être utilisés pour commander un ou plusieurs de ces degrés de mouvement. Lorsque plusieurs degrés de mouvement sont présents, les actionneurs responsables d'exécuter les mouvements correspondants ne sont pas forcément tous commandés de la même manière. Il s'entend que le mouvement demandé peut être une combinaison de mouvements et n'est pas restreint à un mouvement unitaire.
- La
figure 8 illustre un autre système de commande des mouvements du bras de manutention 6. Dans ce système on a représenté trois actionneurs responsables des mouvements selon trois degrés différents, à savoir : - un actionneur de levage/abaissement 108 responsable des mouvements de pivotement autour de l'axe 7, dénotés levage L+ et abaissement L-, commandé par un distributeur hydraulique 131
- un actionneur de télescopage 308 responsable des mouvements de translation le long de l'axe du bras de manutention 6, dénotés allongement T+ et rétraction T-, commandé par un distributeur hydraulique 231, et
- un actionneur d'outil 208 responsable des mouvements de pivotement de l'outil autour de l'axe 15, dénotés redressement I+ et abaissement I-, commandé par un distributeur hydraulique 331.
- A titre illustratif, les distributeurs hydrauliques 131, 231, 331 sont des distributeurs à commande électrique. Les mêmes chiffres de références que sur la
figure 6 sont donc employés pour désigner des éléments identiques ou similaires. - Les procédés d'arrêt des mouvements décrits plus haut peuvent être appliqués bien sûr au mouvement d'abaissement L-, comme déjà décrit, mais aussi au mouvement d'allongement T+ et éventuellement à d'autres mouvements.
- Lorsque l'unité de commande 10 arrête ou empêche automatiquement un mouvement, du fait que la condition d'arrêt est satisfaite, certains degrés de mouvement peuvent rester exécutables par l'opérateur pendant que d'autres sont interdits. De préférence, le mouvement de levage L+ et le mouvement rétraction T-restent exécutables puisqu'ils contribuent à diminuer le moment de basculement,
- Les degrés de mouvement restant exécutables lorsque la condition d'arrêt d'un mouvement est satisfaite ne sont pas forcément les mêmes dans l'état 72 et dans l'état 73. Par exemple, lorsque la condition d'arrêt d'un mouvement d'abaissement L- est satisfaite dans l'état 72 (mode de fonctionnement renforcé sélectionné), les mouvements de redressement I+ et d'abaissement I- sont également bloqués, alors que ces mouvements restent exécutables lorsque la condition d'arrêt d'un mouvement d'abaissement L- est satisfaite dans l'état 73 (mode de fonctionnement simple sélectionné).
- La
figure 9 représente un mode de réalisation de l'essieu arrière 4 du chariot télescopique 1. L'essieu arrière 4 comporte deux bras de support de roue 60 portant les roues arrière 62. L'un des bras de support de roue 60 ou chacun d'eux est équipé d'un extensomètre 61 agencé pour mesurer des déformations du bras de support de roue 60 en flexion. Plus précisément, l'extensomètre 61 mesure la variation de longueur entre deux bornes espacées sur le bras de support de roue 60. Les signaux de mesure des extensomètres 61 peuvent être employés pour former le signal indicatif du moment de basculement, par exemple en tant que moyenne des deux signaux de mesure. Alternativement, il est possible d'employer un seul extensomètre 61 pour produire le signal indicatif du moment de basculement. De préférence, l'essieu arrière 4 est relié de manière oscillante au châssis 2 au moyen d'un pivot 66 d'axe longitudinal passant par une partie centrale 65 de l'essieu. - Certains éléments représentés, notamment l'unité de commande, peuvent être réalisés sous différentes formes, de manière unitaire ou distribuée, au moyen de composants matériels et/ou logiciels. Des composants matériels utilisables sont les circuits intégrés spécifiques ASIC, les réseaux logiques programmables FPGA ou les microprocesseurs. Des composants logiciels peuvent être écrits dans différents langages de programmation, par exemple C, C++, Java ou VHDL. Cette liste n'est pas exhaustive.
- Les procédés et systèmes décrits ci-dessus dans le cadre d'un chariot télescopique sont applicables à d'autres machines de manutention.
- Bien que l'invention ait été décrite en liaison avec plusieurs modes de réalisation particuliers, il est bien évident qu'elle n'y est nullement limitée et qu'elle comprend tous les équivalents techniques des moyens décrits ainsi que leurs combinaisons si celles-ci entrent dans le cadre de l'invention.
- L'usage du verbe « comporter », « comprendre » ou « inclure » et de ses formes conjuguées n'exclut pas la présence d'autres éléments ou d'autres étapes que ceux énoncés dans une revendication. L'usage de l'article indéfini « un » ou « une » pour un élément ou une étape n'exclut pas, sauf mention contraire, la présence d'une pluralité de tels éléments ou étapes.
- Dans les revendications, tout signe de référence entre parenthèses ne saurait être interprété comme une limitation de la revendication.
Claims (15)
- Procédé de commande pour commander un dispositif d'actionnement (8) dans une machine de manutention (1) comportant un corps principal (2) mobile et un bras de manutention (6) destiné à recevoir une charge (9) devant être déplacée, le dispositif d'actionnement étant configuré pour exécuter un mouvement du bras de manutention par rapport au corps principal,
le procédé comportant :mesurer (21) une grandeur indicative d'un moment de basculement appliqué sur le corps principal par rapport à un axe de basculement, etarrêter ou empêcher (26) un mouvement du bras de manutention exécuté ou demandé dès qu'une condition d'arrêt est satisfaite, la condition d'arrêt étant dépendante de la grandeur indicative du moment de basculement mesurée,et dans lequel, quand un mode de fonctionnement renforcé est sélectionné (72), la condition d'arrêt est aussi dépendante d'une grandeur représentative de la vitesse du mouvement du bras de manutention,et quand un mode de fonctionnement simple est sélectionné (73), la condition d'arrêt est indépendante de la grandeur représentative de la vitesse du mouvement du bras de manutention. - Procédé selon la revendication 1, comportant en outre :sélectionner le mode de fonctionnement renforcé en réponse à une première action (75) d'un opérateur sur un organe de sélection, etsélectionner le mode de fonctionnement simple (74) en réponse à une deuxième action d'un opérateur sur l'organe de sélection.
- Procédé selon la revendication 2, comportant en outre :sélectionner le mode de fonctionnement renforcé en réponse la détection (76) de ce que le corps principal est resté dans un état sensiblement immobile pendant une durée supérieure à un seuil de durée prédéterminé.
- Procédé selon la revendication 3, comportant en outre :mesurer une grandeur représentative d'une vitesse de déplacement du corps principal, etdétecter (76) que le corps principal est resté dans l'état sensiblement immobile en fonction de la grandeur représentative d'une vitesse de déplacement du corps principal.
- Procédé selon l'une des revendications 1 à 4, comportant en outre :sélectionner le mode de fonctionnement renforcé en réponse la détection (76) de l'activation d'un frein de parc, la désactivation d'une transmission ou la descente de pieds stabilisateurs en appui au sol.
- Procédé selon l'une des revendications 1 à 5, comportant en outre :mesurer (23) une vitesse instantanée du bras de manutention par rapport au corps principal en tant que grandeur représentative de la vitesse du mouvement du bras de manutention.
- Procédé selon l'une des revendications 1 à 5, comportant en outre :recevoir (28) un signal de demande de mouvement destiné à influencer le dispositif d'actionnement pour faire exécuter un mouvement du bras de manutention par le dispositif d'actionnement, le signal de demande de mouvement présentant un attribut représentatif d'une vitesse du mouvement à exécuter,déterminer (123) la grandeur représentative de la vitesse du mouvement du bras de manutention en fonction de l'attribut du signal de demande de mouvement.
- Procédé selon l'une des revendications 1 à 7, dans lequel, quand le mode de fonctionnement renforcé est sélectionné, le procédé comporte en outre :déterminer (22) un seuil représentatif d'une vitesse maximale autorisée en fonction de la grandeur indicative du moment de basculement,comparer (24, 124) la grandeur représentative de la vitesse du mouvement exécuté ou à exécuter au seuil représentatif d'une vitesse maximale autorisée etcommander le dispositif d'actionnement en fonction du résultat de ladite comparaison, de manière à :exécuter ou continuer (25) le mouvement du bras de manutention tant que la grandeur représentative de la vitesse du mouvement exécuté ou à exécuter est inférieure audit seuil représentatif d'une vitesse maximale autorisée, etempêcher ou arrêter (26) le mouvement du bras de manutention dès que la grandeur représentative de la vitesse du mouvement exécuté ou à exécuter est supérieure audit seuil représentatif d'une vitesse maximale autorisée.
- Procédé selon la revendication 8, dans lequel le seuil représentatif d'une vitesse maximale autorisée présente une évolution décroissante quand le moment de basculement augmente.
- Procédé selon l'une des revendications 1 à 9, dans lequel, quand le mode de fonctionnement simple est sélectionné (73), le procédé comporte en outre :empêcher ou arrêter le mouvement du bras de manutention dès que la grandeur indicative d'un moment de basculement a franchi un seuil prédéterminé.
- Machine de manutention (1) comportant :un corps principal (2),un bras de manutention (6) destiné à recevoir une charge devant être déplacée, un dispositif d'actionnement (8) configuré pour exécuter un mouvement du bras de manutention par rapport au corps principal,un capteur indicatif de moment de basculement (11) sensible à une grandeur indicative d'un moment de basculement appliqué sur le corps principal par rapport à un axe de basculement,une unité de commande (10) configurée pour commander le dispositif d'actionnement de manière à arrêter ou empêcher (26) un mouvement du bras de manutention exécuté ou demandé dès qu'une condition d'arrêt est satisfaite, la condition d'arrêt étant dépendante de la grandeur indicative du moment de basculement mesurée, et un organe de sélection (70) actionnable par un opérateur pour sélectionner un mode de fonctionnement simple et un mode de fonctionnement renforcé,dans lequel, quand le mode de fonctionnement renforcé est sélectionné, la condition d'arrêt employée par l'unité de commande (10) est aussi dépendante d'une grandeur représentative de la vitesse du mouvement du bras de manutention exécuté ou demandé,et quand le mode de fonctionnement simple est sélectionné, la condition d'arrêt est indépendante de la grandeur représentative de la vitesse du mouvement du bras de manutention.
- Machine selon la revendication 11, dans laquelle l'organe de sélection (70) est configuré pour :sélectionner (75) le mode de fonctionnement renforcé en réponse à une première action de l'opérateur sur l'organe de sélection, etsélectionner (74) le mode de fonctionnement simple en réponse à une deuxième action de l'opérateur sur l'organe de sélection.
- Machine selon la revendication 11 ou 12, dans laquelle l'unité de commande (10) est configurée pour sélectionner le mode de fonctionnement renforcé en réponse la détection (76) de ce que le corps principal est resté dans un état sensiblement immobile pendant une durée supérieure à un seuil de durée prédéterminé.
- Machine selon la revendication 13, comportant en outre :un capteur de vitesse de déplacement (71) configuré pour mesurer une grandeur représentative d'une vitesse de déplacement du corps principal, etdans laquelle l'unité de commande (10) est configurée pour détecter (76) que le corps principal est resté dans l'état sensiblement immobile en fonction de la grandeur représentative d'une vitesse de déplacement du corps principal.
- Machine selon l'une des revendications 11 à 14, comportant en outre des moyens de mesure (18) pour mesurer une vitesse instantanée du bras de manutention (6) par rapport au corps principal en tant que grandeur représentative de la vitesse du mouvement du bras de manutention.
Priority Applications (8)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17181715.8A EP3431436B1 (fr) | 2017-07-17 | 2017-07-17 | Procédé de commande d'une machine de manutention et machine de manutention correspondante |
| CA3069769A CA3069769A1 (fr) | 2017-07-17 | 2018-07-09 | Commande d'une machine de manutention |
| BR112019027093-0A BR112019027093B1 (pt) | 2017-07-17 | 2018-07-09 | Método de controle para controlar um dispositivo de atuação em uma máquina de manuseio, e máquina de manuseio |
| AU2018304430A AU2018304430B2 (en) | 2017-07-17 | 2018-07-09 | Control of a handling machine |
| CN201880047154.2A CN110958987B (zh) | 2017-07-17 | 2018-07-09 | 装卸机的控制 |
| RU2019142065A RU2756412C2 (ru) | 2017-07-17 | 2018-07-09 | Управление погрузочно-разгрузочной машиной |
| PCT/EP2018/068554 WO2019016014A1 (fr) | 2017-07-17 | 2018-07-09 | Commande d'une machine de manutention |
| US16/627,133 US11390508B2 (en) | 2017-07-17 | 2018-07-09 | Control of a handling machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP17181715.8A EP3431436B1 (fr) | 2017-07-17 | 2017-07-17 | Procédé de commande d'une machine de manutention et machine de manutention correspondante |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP3431436A1 true EP3431436A1 (fr) | 2019-01-23 |
| EP3431436B1 EP3431436B1 (fr) | 2020-04-15 |
Family
ID=59363038
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP17181715.8A Active EP3431436B1 (fr) | 2017-07-17 | 2017-07-17 | Procédé de commande d'une machine de manutention et machine de manutention correspondante |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11390508B2 (fr) |
| EP (1) | EP3431436B1 (fr) |
| CN (1) | CN110958987B (fr) |
| AU (1) | AU2018304430B2 (fr) |
| CA (1) | CA3069769A1 (fr) |
| RU (1) | RU2756412C2 (fr) |
| WO (1) | WO2019016014A1 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117446656A (zh) * | 2023-12-18 | 2024-01-26 | 河南省大方重型机器有限公司 | 一种节能降噪的绿色环保单梁起重机 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IT201800010234A1 (it) * | 2018-11-12 | 2020-05-12 | Manitou Italia Srl | Telehandler con sistema di controllo. |
| US20210372090A1 (en) * | 2020-06-02 | 2021-12-02 | Manitou Equipment America, Llc | Boom Extension and Rotation Monitoring System |
| ZA202110395B (en) * | 2020-12-30 | 2023-11-29 | Manitou Italia Srl | Telehandler with facilitated alignment adjustment |
| US20230358019A1 (en) * | 2022-05-05 | 2023-11-09 | Caterpillar Inc. | Systems and methods for controlling a machine implement |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1403046A (en) | 1972-09-08 | 1975-08-13 | Weimar Kombinat Veb | Load factor safety mechanism |
| US4006347A (en) | 1975-02-04 | 1977-02-01 | Kruger & Co. Kg | System for a crane boom |
| EP0059901A1 (fr) | 1981-03-05 | 1982-09-15 | CAMIVA Société anonyme dite : | Dispositif de commande à microprocesseur pour échelle orientable déployable ou bras élévateur analogue |
| US5119949A (en) * | 1989-02-13 | 1992-06-09 | Hikoma Seisakusho Co., Ltd. | Crane vehicle with operation speed control |
| US5333533A (en) | 1991-09-13 | 1994-08-02 | Caterpillar Inc. | Method and apparatus for controlling an implement |
| JP3252006B2 (ja) * | 1993-03-10 | 2002-01-28 | 株式会社タダノ | ブーム付き作業車の制御装置 |
| GB2390595A (en) * | 2002-07-12 | 2004-01-14 | Bamford Excavators Ltd | Safety control system for a load handling machine |
| JP2005273262A (ja) * | 2004-03-24 | 2005-10-06 | Sumitomo (Shi) Construction Machinery Manufacturing Co Ltd | 建設機械の旋回装置 |
| GB2431248A (en) * | 2004-05-13 | 2007-04-18 | Komatsu Mfg Co Ltd | Rotation control device, rotation control method, and construction machine |
| EP2263965A1 (fr) * | 2009-06-19 | 2010-12-22 | J.C. Bamford Excavators Limited | Procédé pour la commande d'une machine de travail |
| EP2733110A1 (fr) * | 2012-11-16 | 2014-05-21 | Kramer-Werke GmbH | Machine mobile avec un dispositif de chargement, la machine peut fonctionner dans deux modes de commande d'urgence |
| EP2736833A1 (fr) * | 2011-07-28 | 2014-06-04 | Hydac System GmbH | Dispositif de commande |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS63114730A (ja) | 1986-10-31 | 1988-05-19 | Hitachi Constr Mach Co Ltd | 多関節構造機械の制御装置 |
| JPH05319785A (ja) | 1991-09-06 | 1993-12-03 | Yotaro Hatamura | 建設機械の姿勢制御システム |
| US5639119A (en) * | 1992-12-04 | 1997-06-17 | Trak International, Inc. | Forklift stabilizing apparatus |
| JPH07144884A (ja) | 1993-11-26 | 1995-06-06 | Komatsu Mec Corp | 移動式リーチタワークレーン |
| RU65832U1 (ru) * | 2007-04-25 | 2007-08-27 | Общество с ограниченной ответственностью "ВЕЛМАШ-Сервис" (ООО "ВЕЛМАШ-С") | Машина погрузочно-разгрузочная |
| GB2483647B (en) | 2010-09-14 | 2014-04-09 | Bamford Excavators Ltd | A machine, controller, and control method |
| CA2815333C (fr) * | 2010-11-12 | 2015-05-19 | Jlg Industries, Inc. | Systeme de surveillance de stabilite longitudinale |
| CN102398867B (zh) * | 2011-11-02 | 2013-07-10 | 中联重科股份有限公司 | 一种起重机的防倾翻方法及系统 |
| CN104961061B (zh) | 2015-06-30 | 2017-01-04 | 中国一冶集团有限公司 | 一种用于履带式起重机的力矩限制器及其控制方法 |
| RU171471U1 (ru) * | 2016-07-14 | 2017-06-01 | Николай Алексеевич Гречишкин | Универсальный погрузчик-экскаватор |
-
2017
- 2017-07-17 EP EP17181715.8A patent/EP3431436B1/fr active Active
-
2018
- 2018-07-09 US US16/627,133 patent/US11390508B2/en active Active
- 2018-07-09 RU RU2019142065A patent/RU2756412C2/ru active
- 2018-07-09 AU AU2018304430A patent/AU2018304430B2/en active Active
- 2018-07-09 CN CN201880047154.2A patent/CN110958987B/zh active Active
- 2018-07-09 CA CA3069769A patent/CA3069769A1/fr active Pending
- 2018-07-09 WO PCT/EP2018/068554 patent/WO2019016014A1/fr active Application Filing
Patent Citations (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB1403046A (en) | 1972-09-08 | 1975-08-13 | Weimar Kombinat Veb | Load factor safety mechanism |
| US4006347A (en) | 1975-02-04 | 1977-02-01 | Kruger & Co. Kg | System for a crane boom |
| EP0059901A1 (fr) | 1981-03-05 | 1982-09-15 | CAMIVA Société anonyme dite : | Dispositif de commande à microprocesseur pour échelle orientable déployable ou bras élévateur analogue |
| US5119949A (en) * | 1989-02-13 | 1992-06-09 | Hikoma Seisakusho Co., Ltd. | Crane vehicle with operation speed control |
| US5333533A (en) | 1991-09-13 | 1994-08-02 | Caterpillar Inc. | Method and apparatus for controlling an implement |
| JP3252006B2 (ja) * | 1993-03-10 | 2002-01-28 | 株式会社タダノ | ブーム付き作業車の制御装置 |
| GB2390595A (en) * | 2002-07-12 | 2004-01-14 | Bamford Excavators Ltd | Safety control system for a load handling machine |
| EP1532065A1 (fr) | 2002-07-12 | 2005-05-25 | J.C. Bamford Excavators Limited | Systeme de commande pour appareil de manipulation de charge |
| JP2005273262A (ja) * | 2004-03-24 | 2005-10-06 | Sumitomo (Shi) Construction Machinery Manufacturing Co Ltd | 建設機械の旋回装置 |
| GB2431248A (en) * | 2004-05-13 | 2007-04-18 | Komatsu Mfg Co Ltd | Rotation control device, rotation control method, and construction machine |
| EP2263965A1 (fr) * | 2009-06-19 | 2010-12-22 | J.C. Bamford Excavators Limited | Procédé pour la commande d'une machine de travail |
| EP2736833A1 (fr) * | 2011-07-28 | 2014-06-04 | Hydac System GmbH | Dispositif de commande |
| EP2733110A1 (fr) * | 2012-11-16 | 2014-05-21 | Kramer-Werke GmbH | Machine mobile avec un dispositif de chargement, la machine peut fonctionner dans deux modes de commande d'urgence |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117446656A (zh) * | 2023-12-18 | 2024-01-26 | 河南省大方重型机器有限公司 | 一种节能降噪的绿色环保单梁起重机 |
| CN117446656B (zh) * | 2023-12-18 | 2024-03-22 | 河南省大方重型机器有限公司 | 一种节能降噪的绿色环保单梁起重机 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2018304430B2 (en) | 2023-11-30 |
| WO2019016014A1 (fr) | 2019-01-24 |
| AU2018304430A1 (en) | 2020-01-16 |
| US20200172384A1 (en) | 2020-06-04 |
| CA3069769A1 (fr) | 2019-01-24 |
| US11390508B2 (en) | 2022-07-19 |
| CN110958987B (zh) | 2021-04-02 |
| RU2756412C2 (ru) | 2021-09-30 |
| CN110958987A (zh) | 2020-04-03 |
| EP3431436B1 (fr) | 2020-04-15 |
| BR112019027093A2 (pt) | 2020-07-07 |
| RU2019142065A (ru) | 2021-08-17 |
| RU2019142065A3 (fr) | 2021-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3431436B1 (fr) | Procédé de commande d'une machine de manutention et machine de manutention correspondante | |
| EP3431435B1 (fr) | Commande d'une machine de manutention | |
| FR2691185A1 (fr) | Système de commande pour prévenir automatiquement la surcharge d'une excavatrice. | |
| FR2868764A1 (fr) | Chariot elevateur a meilleure stabilite de basculement statique/quasi statique | |
| EP1698497B1 (fr) | Dispositif de contrôle du basculement pour chariot élévateur | |
| EP2301884B1 (fr) | Nacelle élévatrice et méthode de commande d'une telle nacelle | |
| US9932215B2 (en) | Lift arm suspension system for a power machine | |
| FR3100240A1 (fr) | Essieu oscillant pour un engin de levage, engin de levage comprenant un tel essieu et procédé de contrôle | |
| FR2744151A1 (fr) | Procede de controle du rebond d'un outil | |
| FR2868765A1 (fr) | Chariot elevateur a meilleure stabilite de basculement statique/quasi-statique et dynamique | |
| FR2522845A1 (fr) | Systeme permettant de controler la stabilite d'un vehicule lorsqu'il prend un virage | |
| CA3132516A1 (fr) | Commande d'une machine de manutention | |
| FR2818945A1 (fr) | Dispositif et procede pour eviter le renversement d'un vehicule | |
| WO2020245531A1 (fr) | Engin de manutention de charge et procédé de commande d'un engin de manutention de charge | |
| FR2750972A1 (fr) | Chariot de manutention pourvu d'un systeme de securite permettant d'eviter son basculement accidentel | |
| EP0349359A1 (fr) | Système limiteur de couple ou de moment pour engins de levage | |
| EP3292071B1 (fr) | Procédé et dispositif de surveillance d'appui pour chariot comportant un moyen de stabilisateur | |
| FR3145356A1 (fr) | Machine de levage | |
| FR3119455A1 (fr) | Procédé de saisie du poids de la charge d’un chariot élévateur | |
| FR2971486A1 (fr) | Procede et dispositif pour le controle d'un aeronef en lacet. | |
| FR2920534A1 (fr) | Capteur de position | |
| EP1156162A1 (fr) | Engins de travaux publics |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE APPLICATION HAS BEEN PUBLISHED |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: REQUEST FOR EXAMINATION WAS MADE |
|
| 17P | Request for examination filed |
Effective date: 20190627 |
|
| RBV | Designated contracting states (corrected) |
Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: GRANT OF PATENT IS INTENDED |
|
| INTG | Intention to grant announced |
Effective date: 20191129 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 602017014662 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: FRENCH |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 1257062 Country of ref document: AT Kind code of ref document: T Effective date: 20200515 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: FP |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200716 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200815 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200715 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200817 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK05 Ref document number: 1257062 Country of ref document: AT Kind code of ref document: T Effective date: 20200415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200715 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 602017014662 Country of ref document: DE |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: AT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 |
|
| 26 | Opposition filed |
Opponent name: J.C. BAMFORD EXCAVATORS LIMITED Effective date: 20210115 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200731 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200731 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200717 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20200415 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R100 Ref document number: 602017014662 Country of ref document: DE |
|
| PLCK | Communication despatched that opposition was rejected |
Free format text: ORIGINAL CODE: EPIDOSNREJ1 |
|
| P01 | Opt-out of the competence of the unified patent court (upc) registered |
Effective date: 20230530 |
|
| PLBN | Opposition rejected |
Free format text: ORIGINAL CODE: 0009273 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: OPPOSITION REJECTED |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20230710 Year of fee payment: 7 |
|
| 27O | Opposition rejected |
Effective date: 20230607 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: LU Payment date: 20240625 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20240628 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20240712 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20240729 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20240726 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20240725 Year of fee payment: 8 |