EP2921260A1 - Pneumatisch betreibbares Arbeitsgerät - Google Patents
Pneumatisch betreibbares Arbeitsgerät Download PDFInfo
- Publication number
- EP2921260A1 EP2921260A1 EP14160861.2A EP14160861A EP2921260A1 EP 2921260 A1 EP2921260 A1 EP 2921260A1 EP 14160861 A EP14160861 A EP 14160861A EP 2921260 A1 EP2921260 A1 EP 2921260A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- piston rod
- arm
- head housing
- tool according
- bearing element
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 210000003127 knee Anatomy 0.000 claims description 5
- 238000005096 rolling process Methods 0.000 claims description 5
- 210000000617 arm Anatomy 0.000 description 24
- 238000006073 displacement reaction Methods 0.000 description 9
- 239000012530 fluid Substances 0.000 description 5
- OIRDTQYFTABQOQ-UHTZMRCNSA-N Vidarabine Chemical compound C1=NC=2C(N)=NC=NC=2N1[C@@H]1O[C@H](CO)[C@@H](O)[C@@H]1O OIRDTQYFTABQOQ-UHTZMRCNSA-N 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000001502 supplementing effect Effects 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/06—Arrangements for positively actuating jaws
- B25B5/12—Arrangements for positively actuating jaws using toggle links
- B25B5/122—Arrangements for positively actuating jaws using toggle links with fluid drive
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25B—TOOLS OR BENCH DEVICES NOT OTHERWISE PROVIDED FOR, FOR FASTENING, CONNECTING, DISENGAGING OR HOLDING
- B25B5/00—Clamps
- B25B5/06—Arrangements for positively actuating jaws
- B25B5/061—Arrangements for positively actuating jaws with fluid drive
- B25B5/064—Arrangements for positively actuating jaws with fluid drive with clamping means pivoting around an axis perpendicular to the pressing direction
Definitions
- the invention relates to a pneumatically operable working device, in particular for use in the bodywork of the motor vehicle industry, with a cylinder having a cylinder housing, a displaceable in this piston and a connected thereto, linearly displaceable and led out of the cylinder housing, not variable-length piston rod, and with a connected to the cylinder housing head housing, wherein a projecting into the head housing portion of the piston rod with at least one toggle lever for pivoting a toggle associated arm, in particular gripping arm or clamping arm cooperates, said arm in the head housing stored and pivotable between a closed position and an open position.
- Such a working device is from the DE 296 15 157 U1 known.
- this two toggle lever pivotally engage directly on the located in the head housing end of the piston rod.
- two gripping arms between a closed position and an open position are pivotable. In the closed position, the gripping arms are arranged parallel to each other.
- a arranged in the region of the free end of the piston rod bearing axis for the two toggle lever is provided at the end with bearing rollers, which are guided in guide grooves of the head housing.
- Pneumatically operated equipment having gripping or clamping arms, and in which a non-variable-length piston rod is used, are further from the DE 10 2004 040 606 B3 .
- a pneumatically operable working device in which a piston of a cylinder is positioned in the open position of a clamping arm in the region of a bottom of the cylinder housing.
- the piston rod is designed variable in length and has piston rod parts with threaded portions, wherein the piston rod parts are screwed together.
- Object of the present invention is to develop a working device of the type mentioned so that this, with structurally simple design, with respect to the open position of the arm is infinitely adjustable.
- the open position of the arm in particular of the gripping arm or clamping arm, is infinitely adjustable.
- the piston rod has a threaded portion and receives in the region of the threaded portion an adjustable in the longitudinal direction of the piston rod stop member.
- the stop member is in the open position of this arm to a stationary relative to the head housing system.
- the piston rod is rotatable with respect to its longitudinal axis. It takes in the region of the knee lever end facing a bearing element for the toggle.
- the piston rod is rotatable with respect to this bearing element.
- the stop member can be changed in its position relative to the piston rod, based on the axial direction of the piston rod, whereby by adjusting the abutment portion of the opening angle of the arm is infinitely adjustable. At this opening angle, the stop member contacts the station relative to the head housing stationary.
- the working device may be designed such that the cylinder and the head housing constitute separate structural units or a common structural unit.
- the stop member is in particular rotationally fixed in the head housing positioned. If the piston rod is rotated with respect to its longitudinal axis, and thus changes the position of the stop member in the direction of the longitudinal axis of the piston rod to this, therefore, the stop member is not rotated and displaced only in the axial direction of the piston rod.
- This positioning of the stop member in the head housing can be achieved in different ways, for example by a guide of the stop member in the direction of the longitudinal axis of the piston rod in the head housing, or by a non-circular design of the stop member, wherein the non-circular outer contour of the stop member cooperates with a correspondingly shaped inner contour of the head housing.
- the relative to the head housing stationary system can be designed in different ways.
- the stationary system has the task to form the bearing surface for the stop member, which prevents further contact with the abutment member on the stationary system further axial displacement of the stop member and thus defines the open position of the arm.
- the contact surface extends orthogonal to the longitudinal axis of the piston rod.
- a contact surface of the abutment part extending orthogonally to the longitudinal axis of the piston rod interacts with the abutment surface upon contact of the abutment part.
- a head housing facing away from the bottom of the cylinder housing means for axially displacing the piston rod in the closed position of the arm with arranged in the region of the bottom piston in order to move out the toggle lever from an over-center position.
- This means for axially displacing the piston rod in the closed position of the arm is provided so as to allow, in the closed position of the arm, the supply of fluid to the cylinder to allow fluid-independent release of the arm from the over-center position of the toggle lever. To achieve this, it is only necessary to exert a force on the piston rod via the means for axial displacement of the piston rod, whereby the piston rod is moved slightly axially and the toggle lever is pivoted from the over-center position.
- the pivot angle of the toggle lever from the dead center position in the Mattertot Vietnamese ein the fraction of a degree of angle, so that it is only necessary to move the toggle lever from the Kochtot Vietnamese simply to move the piston rod by means of the axial displacement of the piston rod by a small distance, which corresponds to this small angle.
- the means for axial displacement of the piston rod have the means for rotating the piston rod.
- the means are in the simplest manner as in the bottom of the cylinder housing slidably and sealed to the bottom of the plunger formed, which has a receptacle for a tool for rotating the plunger outside of the cylinder housing and within the cylinder housing a receptacle for rotationally fixed engagement in a receptacle of this facing the end of the piston rod.
- the pneumatically operated implement has, in particular, a toggle lever for pivoting an arm associated therewith, or in particular two toggle levers, wherein each of the two toggle levers serves to pivot an arm associated with this toggle lever.
- the arm is in particular a gripping arm.
- the toggle lever or the toggle lever are arranged in the closed position of the arm or the arms, in particular in an over-center position.
- a further pivoting of the respective toggle lever on the Kochtot Vietnamese too much is prevented by a stop, which can be arranged arbitrarily and has the task to prevent axial displacement of the piston rod or with this piston rod cooperating components in the direction of the bottom of the cylinder housing.
- the bearing element has on opposite sides receptacles for the pivotable mounting of two hinge connectors which are pivotally connected in the region of the bearing element facing away from the ends with the two arms at a distance from the pivot axes of the arms, wherein the pivot axes the joint connector and the arms are arranged parallel to each other.
- the receptacles are thus provided for the pivotable mounting of the two joint connectors.
- the same bearing element can be used for reasons of standardization of the implement, in which case only one articulated connector is connected to the bearing element, for connection to one arm, while the other receptacle of the bearing element does not receive a hinge connector.
- the bearing element accommodates the two joint connectors, it is considered to be particularly advantageous if the bearing element, the joint connectors and the arms are arranged symmetrically with respect to a plane passing through the longitudinal axis of the piston rod. This results in a symmetrical design of the implement in the region of the head housing and the two arms, which introduced into the two arms gripping or clamping forces when contacting the working device associated component, such as a body panel, are symmetrically introduced into the implement.
- the bearing element is guided in a guide of the head housing in the direction of the longitudinal axis of the piston rod.
- This guide is important not only under the aspect of the actual leadership of the bearing element in the head housing, but also under the aspect of the introduction of the forces acting on the arm or the arms, from the bearing element in the head housing.
- This guided bearing of the bearing element makes it possible to carry out the implement both in the variant with one arm and in the variant with two arms. In the variant with one arm forces are introduced unbalanced over the arm in the head housing. This is due to the leadership of the bearing element in the head housing readily possible, because the forces are introduced directly through the bearing element and the guide associated therewith in the head housing.
- bearing element is mounted by means of a sliding and / or roller bearing in a guide of the head housing.
- rolling bearing the use of rolling bearings in the form of roller or spherical bearings is considered advantageous.
- the guide has in particular mutually parallel guide surfaces, which are arranged parallel to the pivot axis of the arm.
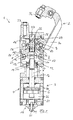
- the figures show a pneumatically operable implement 1, which is used in particular in the bodywork of the automotive industry.
- the implement 1 is as a handling gripper with a single arm 2 - gripper arm - according to the embodiment of the Fig. 1 to 7 - or with two arms 2 - two Gripping arms - according to the embodiment of the Fig. 7 to 13 educated. Both embodiments have a similar structure. In this respect, the presentation of the Fig. 1 to 4 the first embodiment described.
- the working device 1 has a cylinder 3.
- a head housing 5 is connected via not illustrated fastening means.
- the cylinder housing 4 receives a displaceable in this piston 6 and a connected thereto, linearly displaceable and sealed out of the cylinder housing 4 brought out, not variable-length piston rod 7.
- An area of the piston rod 7 projecting into the head housing 5 cooperates with at least one toggle lever 8 for pivoting the arm 2 associated therewith.
- This arm 2 is mounted in the head housing 5 via an axis 9 and about this axis 9 between an open position ( Fig. 1 ) and a closed position ( Fig. 3 ) pivotable.
- the open position of the arm 2 is infinitely adjustable.
- the piston rod 7 has a threaded portion 10 and receives in the region thereof an adjustable in the longitudinal direction of the piston rod 7 stop member 11.
- the stop member 11 is in the open position of the arm 2 to a stationary relative to the cylinder housing 4 system, which is formed as an annular contact surface 12 of the head housing 5, which surrounds the piston rod 7 and is arranged orthogonal to the longitudinal axis 13 of the piston rod 7.
- the cooperating with the contact surface 12 of the head housing 5, also annular contact surface of the stop member 14 is designated by the reference numeral 14. This contact surface 14 is arranged parallel to the contact surface 12.
- the stop member 11 is rotatably positioned in the head housing 5, specifically via a not-shown groove which extends parallel to the longitudinal axis 13 of the piston rod 7 and in which the stop member 11 engages.
- the thread in the Area of the threaded portion 10 between the piston rod 7 and stop member 11 is self-locking.
- the piston rod 7 is rotatable with respect to its longitudinal axis 13 and receives in the region of the knee lever 8 end facing a bearing element 15 for the toggle lever 8.
- the piston rod 7 is rotatable about the longitudinal axis 13 with respect to the bearing element 15.
- the piston rod 7 is inserted into a receptacle 16 of the bearing element 15 and connected by means of a form-locking ring 17 in the extension of the longitudinal axis 13 fixed to the bearing element 15.
- a rotation of the piston rod 7 about the longitudinal axis 13 with respect to the receptacle 16 and thus of the bearing element 15 is possible.
- a head housing 5 facing away from the bottom 18 of the cylinder housing 4 has means 19 for rotating the piston rod 7 in the closed position ( Fig. 3 ) of the arm 2 at in the region of the bottom 18 arranged piston 6.
- This means 19 is a plunger which is mounted sealed in the bottom 18 and slidable in the longitudinal axis 13 of the piston rod 7.
- the arranged outside of the cylinder housing 4 end of the plunger 19 has a hexagonal recess 20 for receiving a tool, not shown, for rotating the plunger 19 about the longitudinal axis 13, wherein the tool is inserted with a hexagonal end in the hexagonal recess 20.
- the arranged within the cylinder housing 4 end is provided with a projection 21 with hexagonal cross-section.
- Fig. 14 shows the engagement of the plunger 19, wherein the projection 21 is inserted in the closed position of the arm 2 in a hexagonal recess in cross section 22 of the facing end of the piston rod 7.
- the bearing member 15 is formed symmetrically with respect to a plane passing through the longitudinal axis 13 of the piston rod 7.
- two axes 25 are mounted, wherein the respective axis 25 on both sides of the bearing element 15 roller-shaped rolling bearing elements 26 receives, which are guided in a bearing groove 27 extending in the longitudinal axis.
- the bearing element 15 is guided substantially without play in the direction of the longitudinal axis 13.
- the bearing element 15 has tabs 28 formed as tabs.
- Each tab 28 is intended to receive a plate-shaped hinge connector 29 in the region of an axis 30. In the embodiment having only one arm 2, only one tab 28 is tied while the other tab 28 remains free. This other tab is connected only in the event that a second arm 2 is present.
- the hinge connector 29 is pivotally connected to the arm 2 in the region of the end facing away from the bearing element 15 in the region of an axis 31.
- This axis 31 is positioned at a distance from the axis 9 of the arm 2.
- the axis 9 and the axes 30 and 31 are arranged parallel to each other.
- the axes 9, 30 and 31 are constructed so that the axes 30 and 31 and 9 and 31 form the toggle lever 8, wherein in the open position according to Fig. 1 the connecting line between the axes 30 and 31 occupies an angle of less than 90 ° with respect to the line connecting the axes 9 and 31 with respect to their centers, while in the closed position of the arm according to Figs Fig.
- this angle is slightly greater than 90 °, so that there is a slight over-center position, in which the bearing element 15 is fixed in the direction of the longitudinal axis 15 and in the direction of the piston rod 7 by the piston rod side roller bearing elements 26 in the region of the end of the Storage groove 27, which faces the piston rod, abut at this end 32 of the bearing groove 27.
- Fig. 15 shows a detail of the mounting of the joint connector 29 in the arm 2.
- the axis 31 is extended and engages in a substantially over a quarter circle extending guide groove 33 of the head housing 5 a.
- the cylinder housing 4 is divided by the piston 5 into two working spaces 34 and 35 of the fluid.
- the working space 34 is acted upon in a known manner with fluid so that the piston 6 is moved in the direction of the bottom 18.
- the stop member 11 reaches in the region of the contact surface 14 out of contact with the contact surface 12 of the head housing 5.
- the piston 6 and the piston rod 7 pull the bearing member 15 and it is about the toggle lever 8 of the arm 2 with its in the region of the free end of the Armes 2 arranged gripping element 36 moves in the direction of a mounted in the head housing 5 gripping member 37.
- the intermediate position is in Fig. 2 illustrated.
- this over-center position of the toggle lever 8 can be released by the above-described mechanical loading of the plunger 19.
- the axial displacement of the piston rod 7 and thus the corresponding axial displacement of the bearing element 15 is achieved, that the hinge connector 29 is slightly pivoted, so that the center of the axis 30 is further away from the ground than the center of the axis 31. In this position, a pivoting of the arm 2 mechanically possible by the arm 2 is gripped.
- the position of the stop member 11 can be changed by turning the piston rod 7.
- the plunger 19 is inserted into the recess 22 of the piston rod 7.
- the plunger 19 is moved back when pressure is applied to the cylinder 3 to transfer the piston 6 from the closed position of the working device, wherein pressure medium is supplied to the working space 35 and also acts on the facing end face of the plunger 19.
- pressure medium is supplied to the working space 35 and also acts on the facing end face of the plunger 19.
- Fig. 4 is denoted by the reference numeral 38 an interrogation device which is mounted in the head housing 5 and the interrogation of the position of the bearing member 15 and the stop member 11 is used.
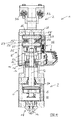
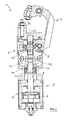
- the Fig. 5 to 7 show for the previously discussed operating conditions according to the Fig. 1 to 4 a with respect to the opening angle adjusted working device 1 with an opening angle of 50 °.
- This adjustment is evident, for example, in that the contact surfaces 12 and 14 have a different distance from each other when the arm 2 is closed, the change in the distance corresponding to the change in the position of the abutment part 11 relative to the piston rod 7.
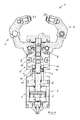
- the embodiment according to the Fig. 8 to 13 corresponds largely to that of Fig. 1 to 7 , To avoid repetition, reference is made to the detailed description of the first embodiment.
- two arms 2 are provided instead of an arm.
- the connection of the second arm is identical to the one arm according to the first embodiment, whereby the bearing element 15, the hinge connector 29 and the arms 2 are arranged symmetrically to the plane passing through the longitudinal axis 13 of the piston rod 7 level. In this respect, reference is made to the above description, concerning the connection of one arm 2.
- the second embodiment also differs from the first embodiment in that the respective arm 2 is modified and, moreover, the gripping element 37 is part of the second arm 2.
- Fig. 8 shows the implement 1 with the two arms 2 in an open position of 90 °
- Fig. 9 the intermediate position
- Fig. 10 the closed position in which contact the two gripping elements 36 and 37.
- Fig. 11 shows for the execution of the implement 1 with the two arms 2 an adjusted position of the stop member 11, so that an open position of 160 ° according to Fig. 11 reveals Fig. 12 the intermediate position is illustrated and Fig. 13 the closed position shows.
- the two embodiments illustrate that can be converted to the variant with an arm 2 or two arms 2 by simply retooling or supplementing the implement 1. It is only necessary, starting from the variant with the one arm 2 to use a modified head housing 5, which has no receptacle for the gripping member 37 and instead to store in this modified head housing 5, the two arms 2 on the knee lever 8 and to the To connect bearing element 15.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Jigs For Machine Tools (AREA)
- Manipulator (AREA)
Abstract
Description
- Die Erfindung betrifft ein pneumatisch betreibbares Arbeitsgerät, insbesondere zur Verwendung im Karosseriebau der Kraftfahrzeugindustrie, mit einem Zylinder, der ein Zylindergehäuse, einen in diesem verschieblichen Kolben und eine mit diesem verbundene, linear verschiebliche und aus dem Zylindergehäuse herausgeführte, nicht längenveränderliche Kolbenstange aufweist, sowie mit einem mit dem Zylindergehäuse verbundenen Kopfgehäuse, wobei ein in das Kopfgehäuse ragender Bereich der Kolbenstange mit mindestens einem Kniehebel zum Schwenken eines dem Kniehebel zugeordneten Arms, insbesondere Greifarms oder Spannarms, zusammenwirkt, wobei dieser Arm im Kopfgehäuse gelagert und zwischen einer geschlossenen Stellung und einer geöffneten Stellung schwenkbar ist.
- Ein derartiges Arbeitsgerät ist aus der
DE 296 15 157 U1 bekannt. Bei diesem greifen zwei Kniehebel unmittelbar an dem im Kopfgehäuse befindlichen Ende der Kolbenstange schwenkbar an. Hierbei sind zwei Greifarme zwischen einer geschlossenen Stellung und einer geöffneten Stellung schwenkbar. In der geschlossenen Stellung sind die Greifarme parallel zueinander angeordnet. Eine im Bereich des freien Endes der Kolbenstange angeordnete Lagerachse für die beiden Kniehebel ist endseitig mit Lagerrollen versehen, die in Führungsnuten des Kopfgehäuses geführt sind. - Aufgrund der unmittelbaren Anbindung der Kniehebel an die Kolbenstange ist der Öffnungswinkel der Greifarme nicht verstellbar. - Pneumatisch betriebene Arbeitsgeräte, die Greif- oder Spannarme aufweisen, und bei denen eine nicht längenveränderliche Kolbenstange Verwendung findet, sind ferner aus der
DE 10 2004 040 606 B3 ,EP 2 241 402 A1 undUS RE 41,223 E bekannt. - In der
EP 2 548 700 A1 ist ein pneumatisch betreibbares Arbeitsgerät beschrieben, bei der ein Kolben eines Zylinders in der geöffneten Stellung eines Spannarmes im Bereich eines Bodens des Zylindergehäuses positioniert ist. Um den Öffnungswinkel des Spannarms einstellen zu können, ist die Kolbenstange längenveränderlich gestaltet und weist Kolbenstangenteile mit Gewindeabschnitten auf, wobei die Kolbenstangenteile ineinandergeschraubt sind. Durch Verdrehen des dem Boden des Zylindergehäuses zugewandten Kolbenstangenteils bei im Bereich des Bodens angeordneten Kolben kann durch von außen zugängliche Mittel zum Drehen dieses Kolbenstangenteils die Länge der Kolbenstange verändert werden und damit der Öffnungswinkel des Spannarms stufenlos verstellt werden. - Aufgabe der vorliegenden Erfindung ist es, ein Arbeitsgerät der eingangs genannten Art so weiterzubilden, dass dieses, bei baulich einfacher Gestaltung, bezüglich der Öffnungsstellung des Armes stufenlos einstellbar ist.
- Gelöst wird die Aufgabe durch ein pneumatisch betreibbares Arbeitsgerät, das gemäß den Merkmalen des Patentanspruchs 1 ausgebildet ist.
- Bei dem erfindungsgemäßen pneumatisch betreibbaren Arbeitsgerät ist die geöffnete Stellung des Armes, insbesondere des Greifarms oder Spannarms, stufenlos einstellbar. Hierbei weist die Kolbenstange einen Gewindeabschnitt auf und nimmt im Bereich des Gewindeabschnitts ein in Längsrichtung der Kolbenstange verstellbares Anschlagteil auf. Das Anschlagteil liegt in der geöffneten Stellung dieses Arms an einer bezüglich des Kopfgehäuses stationären Anlage an. Die Kolbenstange ist bezüglich deren Längsachse drehbar. Sie nimmt im Bereich ihres dem Kniehebel zugewandten Endes ein Lagerelement für den Kniehebel auf. Die Kolbenstange ist bezüglich dieses Lagerelements drehbar.
- Aufgrund dieser Gestaltung des Arbeitsgeräts kann das Anschlagteil in seiner Stellung bezüglich der Kolbenstange, bezogen auf die Axialrichtung der Kolbenstange, verändert werden, womit durch Verstellung des Anschlagteils der Öffnungswinkel des Arms stufenlos einstellbar ist. Bei diesem Öffnungswinkel kontaktiert das Anschlagteil die bezüglich des Kopfgehäuses stationäre Anlage.
- Das Arbeitsgerät kann derart gestaltet sein, dass der Zylinder und das Kopfgehäuse separate Baueinheiten oder eine gemeinsame Baueinheit darstellen.
- Das Anschlagteil ist insbesondere drehfest im Kopfgehäuse positioniert. Wird die Kolbenstange bezüglich deren Längsachse gedreht, und verändert sich somit die Position des Anschlagteils in Richtung der Längsachse der Kolbenstange zu dieser, wird demnach das Anschlagteil nicht mitgedreht und verlagert sich nur in Achsrichtung der Kolbenstange. Diese Positionierung des Anschlagteils im Kopfgehäuse kann auf unterschiedliche Art und Weise erzielt werden, beispielsweise durch eine Führung des Anschlagteils in Richtung der Längsachse der Kolbenstange im Kopfgehäuse, oder aber durch eine unrunde Gestaltung des Anschlagteils, wobei die unrunde Außenkontur des Anschlagteils mit einer entsprechend gestalteten Innenkontur des Kopfgehäuses zusammenwirkt.
- Die bezüglich des Kopfgehäuses stationäre Anlage kann auf unterschiedliche Art und Weise gestaltet sein. Der stationären Anlage kommt die Aufgabe zu, die Lagerfläche für das Anschlagteil zu bilden, die bei Kontakt des Anschlagteils an der stationären Anlage ein weiteres axiales Verstellen des Anschlagteils verhindert und damit die geöffnete Stellung des Arms definiert. Insbesondere ist vorgesehen, dass die Anlagefläche sich orthogonal zur Längsachse der Kolbenstange erstreckt. Hierbei wirkt eine sich orthogonal zur Längsachse der Kolbenstange erstreckende Kontaktfläche des Anschlagteils mit der Anlagefläche bei Anlage des Anschlagteils zusammen.
- Um sicherzustellen, dass im Betrieb des Arbeitsgeräts keine Verstellung von Anschlagteil und Kolbenstange, somit keine Verstellung der geöffneten Stellung des Arms erfolgt, ist vorgesehen, dass das Gewinde zwischen Kolbenstange und Anschlussteil selbsthemmend ist.
- Baulich besonders einfach ist ein Verstellen der Position des Anschlagteils möglich, wenn ein dem Kopfgehäuse abgewandter Boden des Zylindergehäuses Mittel zum Drehen der Kolbenstange in der geschlossenen Stellung des Arms bei im Bereich des Bodens angeordnetem Kolben aufweist. Diese Mittel durchsetzen insbesondere den Boden und können vorzugsweise in Richtung der Längsachse der Kolbenstange verschoben werden, um in Eingriff mit der Kolbenstange gebracht zu werden. Es ist dann möglich, die Kolbenstange von außerhalb des Zylindergehäuses zu drehen. Befindet sich das Anschlagteil in der gewünschten eingestellten Stellung, werden die Mittel wieder außer Eingriff mit der Kolbenstange gebracht. Dies erfolgt beispielsweise bei Druckbeaufschlagung des Zylinders durch das Druckmedium.
- Es wird ferner als vorteilhaft angesehen, wenn ein dem Kopfgehäuse abgewandter Boden des Zylindergehäuses Mittel zum axialen Verschieben der Kolbenstange in der geschlossenen Stellung des Arms bei im Bereich des Bodens angeordnetem Kolben zwecks Herausbewegen des Kniehebels aus einer Übertotpunktstellung aufweist. Dieses Mittel zum axialen Verschieben der Kolbenstange in der geschlossenen Stellung des Arms ist vorgesehen, um dann, wenn in der geschlossenen Stellung des Arms die Zufuhr von Fluid zum Zylinder ausfallen sollte, ein fluidunabhängiges Lösen des Arms aus der Übertotpunktstellung des Kniehebels zu ermöglichen. Um dies zu erreichen, ist es nur erforderlich, über die Mittel zum axialen Verschieben der Kolbenstange eine Kraft auf die Kolbenstange auszuüben, womit die Kolbenstange geringfügig axial bewegt wird und der Kniehebel aus der Übertotpunktstellung geschwenkt wird. In aller Regel beträgt der Schwenkwinkel des Kniehebels von der Totpunktstellung in die Übertotpunktstellung den Bruchteil eines Winkelgrades, sodass es nur erforderlich ist, um den Kniehebel aus der Übertotpunktstellung herauszubewegen, die Kolbenstange mittels der Mittel zum axialen Verschieben der Kolbenstange um eine geringe Strecke zu bewegen, die diesem geringen Winkel entspricht.
- Als besonders vorteilhaft wird es angesehen, wenn die Mittel zum axialen Verschieben der Kolbenstange die Mittel zum Drehen der Kolbenstange aufweisen. Die Mittel sind in einfachster Art und Weise als im Boden des Zylindergehäuses verschieblich und gegenüber dem Boden abgedichteter Stößel ausgebildet, der außerhalb des Zylindergehäuses eine Aufnahme für ein Werkzeug zum Drehen des Stößels aufweist und innerhalb des Zylindergehäuses eine Aufnahme zum drehfesten Eingriff in eine Aufnahme des diesem zugewandten Endes der Kolbenstange aufweist. Bei in die Kolbenstange eingestecktem Stößel kann durch Aufbringen einer Schlagkraft auf den Stößel die Kolbenstange axial bewegt und damit der Kniehebel aus der Übertotpunktstellung bewegt werden. Unabhängig hiervon kommt dem Stößel die Aufgabe zu, beim Drehen des Stößels mittels des Werkzeugs die Kolbenstange um deren Längsachse zu drehen und damit das Anschlagteil bezüglich der Kolbenstange einzustellen.
- Das pneumatisch betriebene Arbeitsgerät weist insbesondere einen Kniehebel zum Schwenken eines diesem zugeordneten Arms auf, oder insbesondere zwei Kniehebel auf, wobei jeder der beiden Kniehebel dem Schwenken eines diesem Kniehebel zugeordneten Arms dient. Bei dem Arm handelt es sich insbesondere um einen Greifarm.
- Der Kniehebel bzw. die Kniehebel sind in der geschlossenen Stellung des Arms bzw. der Arme insbesondere in einer Übertotpunktstellung angeordnet. Ein weiteres Schwenken des jeweiligen Kniehebels über die Übertotpunktstellung hinaus, wird durch einen Anschlag verhindert, der beliebig angeordnet sein kann und die Aufgabe hat, eine axiale Verschiebung der Kolbenstange bzw. mit dieser Kolbenstange zusammenwirkender Bauteile in Richtung des Bodens des Zylindergehäuses zu verhindern.
- Gemäß einer bevorzugten Weiterbildung der Erfindung ist vorgesehen, dass das Lagerelement auf abgewandten Seiten Aufnahmen zur schwenkbaren Lagerung von zwei Gelenkverbindern aufweist, die im Bereich deren dem Lagerelement abgewandten Enden schwenkbar mit den beiden Armen in Abstand zu den Schwenkachsen der Arme verbunden sind, wobei die Schwenkachsen der Gelenkverbinder und der Arme parallel zueinander angeordnet sind. Auf der jeweiligen Seite des Lagerelements, somit seitlich bezüglich der Längsachse der Kolbenstange, sind somit die Aufnahmen zur schwenkbaren Lagerung der beiden Gelenkverbinder vorgesehen. Diese Gestaltung ermöglicht eine baulich einfache Anbindung der beiden Gelenkverbinder, die mit den Armen zusammenwirken.
- Ist bei dem Arbeitsgerät nur ein Arm vorhanden, kann aus Gründen der Standardisierung des Arbeitsgeräts durchaus dasselbe Lagerelement verwendet werden, wobei dann nur ein Gelenkverbinder mit dem Lagerelement verbunden wird, zur Anbindung an den einen Arm, während die andere Aufnahme des Lagerelements keinen Gelenkverbinder aufnimmt.
- Nimmt das Lagerelement die beiden Gelenkverbinder auf, wird es als besonders vorteilhaft angesehen, wenn das Lagerelement, die Gelenkverbinder und die Arme symmetrisch zu einer durch die Längsachse der Kolbenstange verlaufenden Ebene angeordnet sind. Hierdurch ergibt sich eine symmetrische Gestaltung des Arbeitsgeräts im Bereich des Kopfgehäuses und der beiden Arme, womit in die beiden Arme eingeleitete Greif- bzw. Spannkräfte beim Kontaktieren des dem Arbeitsgeräts zugeordneten Bauteils, beispielsweise eines Karosserieblechs, symmetrisch in das Arbeitsgerät eingeleitet werden.
- Es wird als besonders vorteilhaft angesehen, wenn das Lagerelement in einer Führung des Kopfgehäuses in Richtung der Längsachse der Kolbenstange geführt ist. Diese Führung ist nicht nur unter dem Aspekt der eigentlichen Führung des Lagerelements im Kopfgehäuse von Bedeutung, sondern auch unter dem Aspekt der Einleitung der Kräfte, die auf den Arm bzw. die Arme einwirken, vom Lagerelement in das Kopfgehäuse. Diese geführte Lagerung des Lagerelements ermöglicht es, das Arbeitsgerät sowohl in der Variante mit einem Arm als auch in der Variante mit zwei Armen auszuführen. Bei der Variante mit einem Arm werden Kräfte unsymmetrisch über den Arm in das Kopfgehäuse eingeleitet. Dies ist aufgrund der Führung des Lagerelements im Kopfgehäuse ohne Weiteres möglich, weil die Kräfte unmittelbar über das Lagerelement und dem diesem zugeordneten Führung in das Kopfgehäuse eingeleitet werden.
- Es wird unter baulichem Aspekt und unter dem Gesichtspunkt des Verschleißes als besonders vorteilhaft angesehen, wenn das Lagerelement mittels einer Gleit- und/oder Wälzlagerung in einer Führung des Kopfgehäuses gelagert ist. Insbesondere bei der Wälzlagerung wird die Verwendung von Wälzlagern in Form von Rollen- oder Tonnenlagern als vorteilhaft angesehen.
- Die Führung weist insbesondere zueinander parallele Führungsflächen auf, die parallel zur Schwenkachse des Arms angeordnet sind.
- Weitere Merkmale der Erfindung sind in den Unteransprüchen, der Beschreibung der Figuren sowie den Figuren selbst dargestellt, wobei bemerkt wird, dass alle Einzelmerkmale und alle Kombinationen von Einzelmerkmalen erfindungswesentlich sind.
- In den Figuren ist die Erfindung anhand zweier bevorzugter Ausführungsbeispiele dargestellt, ohne hierauf beschränkt zu sein. Es zeigt:
- Fig. 1
- ein erstes Ausführungsbeispiel eines pneumatisch betreibbaren Arbeitsgerätes, das einen einzigen Arm aufweist, veranschaulicht in einer Schnittdarstellung bei einer eingestellten geöffneten Stellung von 30°,
- Fig. 2
- das Arbeitsgerät gemäß
Fig. 1 in einer geöffneten Zwischenstellung, - Fig. 3
- das Arbeitsgerät gemäß der
Fig. 1 und2 in der geschlossenen Stellung, - Fig. 4
- das erste Ausführungsbeispiel des Arbeitsgerätes in einem Schnitt durch eine Kolbenstangenachse des Arbeitsgeräts, senkrecht zur Schnittdarstellung gemäß der
Fig. 1 bis 3 geschnitten, veranschaulicht für eine veränderte eingestellte geöffnete Stellung, - Fig. 5
- das erste Ausführungsbeispiel des Arbeitsgerätes, veranschaulicht bei einer eingestellten geöffneten Stellung von 50°,
- Fig. 6
- das Arbeitsgerät gemäß
Fig. 5 in einer geöffneten Zwischenstellung, - Fig. 7
- das Arbeitsgerät gemäß der
Fig. 5 und6 in der geschlossenen Stellung, - Fig. 8
- ein zweites Ausführungsbeispiel eines pneumatisch betreibbaren Arbeitsgerätes, das zwei Arme aufweist, veranschaulicht in einer Schnittdarstellung bei einer eingestellten geöffneten Stellung von 90°,
- Fig. 9
- das Arbeitsgerät gemäß
Fig. 8 in einer geöffneten Zwischenstellung, - Fig. 10
- das Arbeitsgerät gemäß der
Fig. 8 und9 in der geschlossenen Stellung, - Fig. 11
- das zweite Ausführungsbeispiel des Arbeitsgerätes, veranschaulicht bei einer eingestellten geöffneten Stellung von 160°,
- Fig. 12
- das Arbeitsgerät gemäß
Fig. 11 in einer geöffneten Zwischenstellung, - Fig. 13
- das Arbeitsgerät gemäß der
Fig. 11 und12 in der geschlossenen Stellung, - Fig. 14
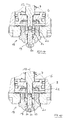
- eine vergrößerte Schnittdarstellung durch den Bodenbereich des Zylinders bei nicht in Wirkstellung befindlichem Stößel,
- Fig. 15
- eine Schnittdarstellung gemäß
Fig. 14 , bei in Wirkstellung befindlichem Stößel, - Fig. 16
- eine vergrößerte Schnittdarstellung der Anbindung eines Lagerelements an einen Arm.
- Die Figuren zeigen ein pneumatisch betreibbares Arbeitsgerät 1, das insbesondere im Karosseriebau der Kraftfahrzeugindustrie verwendet wird. Das Arbeitsgerät 1 ist als Handlingsgreifer mit einem einzigen Arm 2 - Greifarm - gemäß der Ausführungsform nach den
Fig. 1 bis 7 - bzw. mit zwei Armen 2 - zwei Greifarmen - gemäß den Ausführungsbeispiel nach denFig. 7 bis 13 ausgebildet. Beide Ausführungsformen weisen einen ähnlichen Aufbau auf. Insofern wird zunächst anhand der Darstellung derFig. 1 bis 4 das erste Ausführungsbeispiel beschrieben. - Gemäß der Darstellung nach den
Fig. 1 bis 4 weist das Arbeitsgerät 1 einen Zylinder 3 auf. Mit einem Zylindergehäuse 4 ist über nicht veranschaulichte Befestigungsmittel ein Kopfgehäuse 5 verbunden. Das Zylindergehäuse 4 nimmt einen in diesem verschieblichen Kolben 6 und eine mit diesem verbundene, linear verschiebliche und aus dem Zylindergehäuse 4 abgedichtet herausgeführte, nicht längenveränderliche Kolbenstange 7 auf. Ein in das Kopfgehäuse 5 ragender Bereich der Kolbenstange 7 wirkt mit mindestens einem Kniehebel 8 zum Schwenken des diesem zugeordneten Arms 2 zusammen. Dieser Arm 2 ist im Kopfgehäuse 5 über eine Achse 9 gelagert und um diese Achse 9 zwischen einer geöffneten Stellung (Fig. 1 ) und einer geschlossenen Stellung (Fig. 3 ) schwenkbar. - Die geöffnete Stellung des Arms 2 ist stufenlos einstellbar. Hierzu weist die Kolbenstange 7 einen Gewindeabschnitt 10 auf und nimmt in dessen Bereich ein in Längsrichtung der Kolbenstange 7 verstellbares Anschlagteil 11 auf. Das Anschlagteil 11 liegt in der geöffneten Stellung des Arms 2 an einer bezüglich des Zylindergehäuses 4 stationären Anlage an, die als ringförmige Anlagefläche 12 des Kopfgehäuses 5 ausgebildet ist, die die Kolbenstange 7 umgibt und orthogonal zur Längsachse 13 der Kolbenstange 7 angeordnet ist. Die mit der Anlagefläche 12 des Kopfgehäuses 5 zusammenwirkende, gleichfalls ringförmige Anlagefläche des Anschlagteils 14 ist mit der Bezugsziffer 14 bezeichnet. Diese Anlagefläche 14 ist parallel zur Anlagefläche 12 angeordnet.
- Das Anschlagteil 11 ist drehfest im Kopfgehäuse 5 positioniert, konkret über eine nicht veranschaulichte Nut, die sich parallel zur Längsachse 13 der Kolbenstange 7 erstreckt und in die das Anschlagteil 11 eingreift. Das Gewinde im Bereich des Gewindeabschnitts 10 zwischen Kolbenstange 7 und Anschlagteil 11 ist selbsthemmend.
- Die Kolbenstange 7 ist bezüglich deren Längsachse 13 drehbar und nimmt im Bereich dessen dem Kniehebel 8 zugewandten Endes ein Lagerelement 15 für den Kniehebel 8 auf. Die Kolbenstange 7 ist bezüglich des Lagerelements 15 um die Längsachse 13 drehbar. Hierzu ist die Kolbenstange 7 in eine Aufnahme 16 des Lagerelements 15 eingesteckt und mittels eines Formschlussrings 17 in Erstreckung der Längsachse 13 fest mit dem Lagerelement 15 verbunden. Durch diese Verbindung ist eine Drehung der Kolbenstange 7 um die Längsachse 13 bezüglich der Aufnahme 16 und damit des Lagerelements 15 möglich.
- Ein dem Kopfgehäuse 5 abgewandter Boden 18 des Zylindergehäuses 4 weist Mittel 19 zum Drehen der Kolbenstange 7 in der geschlossenen Stellung (
Fig. 3 ) des Arms 2 bei im Bereich des Bodens 18 angeordnetem Kolben 6 auf. Bei diesem Mittel 19 handelt es sich um einen Stößel, der abgedichtet im Boden 18 gelagert und in Längsachse 13 der Kolbenstange 7 verschieblich ist. Das außerhalb des Zylindergehäuses 4 angeordnete Ende des Stößels 19 weist eine Sechskantausnehmung 20 zur Aufnahme eines nicht veranschaulichten Werkzeugs zum Drehen des Stößels 19 um die Längsachse 13 auf, wobei das Werkzeug mit einem Sechskantende in die Sechskantausnehmung 20 gesteckt wird. Das innerhalb des Zylindergehäuses 4 angeordnete Ende ist mit einem Vorsprung 21 mit Sechskantquerschnitt versehen. Diese Details sind der Darstellung derFig. 13 bei nicht in Eingriff stehendem Stößel 19 zu entnehmen.Fig. 14 zeigt den Eingriff des Stößels 19, wobei der Vorsprung 21 in der geschlossenen Stellung des Arms 2 in eine im Querschnitt sechskantförmige Ausnehmung 22 des zugewandten Endes der Kolbenstange 7 eingesteckt ist. Durch Verdrehen des Stößels 12 mittels des Werkzeugs lässt sich somit die Kolbenstange 7 drehen und infolgedessen die Position des Anschlagteils 11 zur Kolbenstange 7 ändern.Fig. 14 veranschaulicht, dass bei in bodenseitiger Endstellung der Kolbenstange 7 in deren Ausnehmung 2 eingestecktem Stößel 19 ein Axialspalt 23 zwischen einem Kopf 24 des Stößels 19 und dem Boden 18 verbleibt, sodass bei Aufbringen einer externen Kraft bzw. Schlagkraft auf den Stößel 19 im Bereich dessen Kopfes 24 eine Axialverlagerung des Stößels 19 zu einer infolgedessen mechanisch bedingten Axialverlagerung der Kolbenstange 7 geringfügig vom Boden 18 weg erfolgt. - Das Lagerelement 15 ist bezüglich einer Ebene, die durch die Längsachse 13 der Kolbenstange 7 verläuft symmetrisch ausgebildet. In dem Lagerelement 15 sind zwei Achsen 25 gelagert, wobei die jeweilige Achse 25 beidseitig des Lagerelements 15 rollenförmige Wälzlagerelemente 26 aufnimmt, die in einer sich in der Längsachse 13 erstreckenden Lagernut 27 geführt sind. Hierdurch ist das Lagerelement 15 im Wesentlichen spielfrei in Richtung der Längsachse 13 geführt. Auf abgewandten Seiten weist das Lagerelement 15 als Laschen ausgebildete Aufnahmen 28 auf. Jede Lasche 28 ist dafür vorgesehen, einen plattenförmigen Gelenkverbinder 29 im Bereich einer Achse 30 aufzunehmen. Bei der Ausführungsform, die nur einen Arm 2 aufweist, wird nur eine Lasche 28 angebunden, während die andere Lasche 28 frei bleibt. Diese andere Lasche wird nur für den Fall angebunden, dass ein zweiter Arm 2 vorhanden ist.
- Der Gelenkverbinder 29 ist im Bereich dessen dem Lagerelement 15 abgewandten Endes schwenkbar mit dem Arm 2 im Bereich einer Achse 31 verbunden. Diese Achse 31 ist in Abstand zur Achse 9 des Arms 2 positioniert. Die Achse 9 sowie die Achsen 30 und 31 sind parallel zueinander angeordnet. Die Achsen 9, 30 und 31 sind so konstruiert, dass die Achsen 30 und 31 sowie 9 und 31 den Kniehebel 8 bilden, wobei in der geöffneten Stellung gemäß
Fig. 1 die Verbindungslinie zwischen den Achsen 30 und 31 einen Winkel von kleiner als 90° bezüglich der Verbindungslinie der Achsen 9 und 31, bezogen auf deren Mittelpunkte, einnimmt, während in der geschlossenen Stellung des Arms gemäßFig. 3 dieser Winkel geringfügig größer ist als 90°, sodass sich eine geringfügige Übertotpunktstellung ergibt, in der das Lagerelement 15 in Richtung der Längsachse 15 und in Richtung der Kolbenstange 7 festgelegt ist, indem die kolbenstangenseitigen Wälzlagerelemente 26 im Bereich des Endes der Lagernut 27, das der Kolbenstange zugewandt ist, an diesem Ende 32 der Lagernut 27 anliegen. -
Fig. 15 zeigt ein Detail der Lagerung des Gelenkverbinders 29 im Arm 2. Hierbei ist die Achse 31 verlängert und greift in eine sich im Wesentlichen über einen Viertelkreis erstreckende Führungsnut 33 des Kopfgehäuses 5 ein. - Die Wirkungsweise des Arbeitsgerätes 1 gemäß dem Ausführungsbeispiel nach den
Fig. 1 bis 4 ist wie folgt: - Das Zylindergehäuse 4 ist durch den Kolben 5 in zwei Arbeitsräume 34 und 35 des Fluids unterteilt. Ausgehend von der geöffneten Stellung von 30° des Arms 2 bezüglich der Längsachse 13, in der sich der Arm 2, bezogen auf die eingestellte Position des Anschlagteils 11 in der maximal geöffneten Stellung befindet, wird in bekannter Art und Weise der Arbeitsraum 34 mit Fluid beaufschlagt, sodass der Kolben 6 in Richtung des Bodens 18 bewegt wird. Hierbei gelangt das Anschlagteil 11 im Bereich dessen Anlagefläche 14 außer Kontakt mit der Anlagefläche 12 des Kopfgehäuses 5. Der Kolben 6 und die Kolbenstange 7 ziehen das Lagerelement 15 mit und es wird über den Kniehebel 8 der Arm 2 mit dessen im Bereich des freien Endes des Armes 2 angeordneten Greifelement 36 in Richtung eines im Kopfgehäuse 5 gelagerten Greifelements 37 bewegt. - Die Zwischenstellung ist in
Fig. 2 veranschaulicht. - Bei der weiteren Bewegung des Kolbens 6 erreicht dieser schließlich seine Endstellung benachbart dem Boden 18, in der die beiden Greifelemente 36 und 37 sich kontaktieren bzw. ein zwischen diesen angeordnetes Blech mittels der Greifelemente 36 und 37 ergriffen wird. Bei geschlossenem Arm 2 befindet sich der Kniehebel 8 in einer geringfügigen Übertotpunktstellung, in der die Verbindungslinie der beiden Achsen 30 und 31, bezogen auf deren Mittelpunkt, in einem Winkel geringfügig ungleich 90° zur Längsachse 13 der Kolbenstange 7 angeordnet ist, derart, dass der Mittelpunkt der Achse 30 etwas näher zum Boden angeordnet ist als der Mittelpunkt der Achse 31. Da in dieser geschlossenen Stellung des Arms 2 gleichfalls eine Anschlagposition gebildet ist, in dem die kolbenstangenseitigen Wälzlagerelemente 26 am Ende 32 der Führungsnut 33 anliegen, kann der Kniehebel 8 aus dieser Übertotpunktstellung nur durch aktives Beaufschlagen des anderen Arbeitsraumes 35 heraus bewegt werden, in die vollständig geöffnete Stellung gemäß
Fig. 1 bei Anlage des Anschlagteils 11 am Kopfgehäuse. - Sollte die Versorgung des Fluids zum Arbeitsgerät 1, insbesondere zum Arbeitsraum 35 ausgefallen sein, kann diese Übertotpunktstellung des Kniehebels 8 durch die vorbeschriebene mechanische Beaufschlagung des Stößels 19 gelöst werden. Hierbei wird über die Axialverlagerung der Kolbenstange 7 und damit die entsprechende Axialverlagerung des Lagerelements 15 erreicht, dass der Gelenkverbinder 29 geringfügig verschwenkt wird, sodass der Mittelpunkt der Achse 30 weiter weg vom Boden ist als der Mittelpunkt der Achse 31. In dieser Stellung ist ein Schwenken des Arms 2 mechanisch möglich, indem der Arm 2 ergriffen wird.
- Wie zuvor, betreffend die Darstellung insbesondere der
Fig. 13 und14 verdeutlicht, kann die Position des Anschlagsteils 11 durch Drehen der Kolbenstange 7 verändert werden. Hierbei ist der Stößel 19 in die Ausnehmung 22 der Kolbenstange 7 eingesteckt. Zurückbewegt wird der Stößel 19 bei Druckbeaufschlagung des Zylinders 3 zum Überführen des Kolbens 6 aus der geschlossenen Stellung des Arbeitsgeräts, wobei Druckmedium dem Arbeitsraum 35 zugeführt wird und auch auf die zugewandte Stirnfläche des Stößels 19 wirkt. Auch beim mechanischen Beaufschlagen des Stößels 19 zum Überführen des Kniehebels aus der Übertotpunktstellung erfolgt das anschließende Rückbewegen des Stößels 19 aufgrund des dem Arbeitsraum 35 zugeführten Druckmedium (nachdem das Druckmedium wieder zur Verfügung steht). - In
Fig. 4 ist mit der Bezugsziffer 38 eine Abfrageeinrichtung bezeichnet, die im Kopfgehäuse 5 gelagert ist und dem Abfragen der Position des Lagerelements 15 bzw. des Anschlagteils 11 dient. - Die
Fig. 5 bis 7 zeigen für die zuvor erörterten Betriebszustände gemäß derFig. 1 bis 4 ein bezüglich des Öffnungswinkels verstelltes Arbeitsgerät 1 mit einem Öffnungswinkel von 50°. Diese Verstellung ergibt sich anschaulich beispielsweise dadurch, dass die Anlageflächen 12 und 14 bei geschlossenem Arm 2 einen anderen Abstand voneinander aufweisen, wobei die Änderung des Abstands der Änderung der Position des Anschlagteils 11 bezüglich der Kolbenstange 7 entspricht. - Das Ausführungsbeispiel gemäß der
Fig. 8 bis 13 entspricht weitgehend demjenigen derFig. 1 bis 7 . Zur Vermeidung von Wiederholungen wird auf die detaillierte Beschreibung des ersten Ausführungsbeispiels verwiesen. - Bei dem Ausführungsbeispiel gemäß der
Fig. 8 bis 13 sind statt eines Armes 2 zwei Arme 2 vorgesehen. Die Anbindung des zweiten Armes erfolgt identisch dem einen Arm gemäß dem ersten Ausführungsbeispiel, womit das Lagerelement 15, die Gelenkverbinder 29 und die Arme 2 symmetrisch zu der durch die Längsachse 13 der Kolbenstange 7 verlaufende Ebene angeordnet sind. Insofern wird auf die vorstehende Beschreibung, betreffend die Anbindung des einen Arms 2 verwiesen. - Das zweite Ausführungsbeispiel unterscheidet sich gegenüber dem ersten Ausführungsbeispiel ferner dadurch, dass der jeweilige Arm 2 modifiziert ist und überdies das Greifelement 37 Bestandteil des zweiten Arms 2 ist.
-
Fig. 8 zeigt das Arbeitsgerät 1 mit den beiden Armen 2 in einer geöffneten Stellung von 90°,Fig. 9 die Zwischenstellung undFig. 10 die geschlossene Stellung, in der sich die beiden Greifelemente 36 und 37 kontaktieren. -
Fig. 11 zeigt für die Ausführung des Arbeitsgeräts 1 mit den beiden Armen 2 eine verstellte Position des Anschlagteils 11, sodass sich eine geöffnete Stellung von 160° gemäßFig. 11 ergibt,Fig. 12 die Zwischenstellung veranschaulicht undFig. 13 die geschlossene Stellung zeigt. - Die beiden Ausführungsbeispiele verdeutlichen, dass durch einfaches Umrüsten bzw. Ergänzen des Arbeitsgerätes 1 dieses auf die Variante mit einem Arm 2 oder zwei Armen 2 umgerüstet werden kann. Es ist nur erforderlich, ausgehend von der Variante mit dem einen Arm 2, ein modifiziertes Kopfgehäuse 5 zu verwenden, das keine Aufnahme für das Greifelement 37 aufweist und stattdessen in diesem modifizierten Kopfgehäuse 5 die beiden Arme 2 über die Kniehebel 8 zu lagern und an das Lagerelement 15 anzubinden.
-
- 1
- Arbeitsgerät
- 2
- Arm
- 3
- Zylinder
- 4
- Zylindergehäuse
- 5
- Kopfgehäuse
- 6
- Kolben
- 7
- Kolbenstange
- 8
- Kniehebel
- 9
- Achse
- 10
- Gewindeabschnitt
- 11
- Anschlagteil
- 12
- Anlagefläche
- 13
- Längsachse
- 14
- Anlagefläche
- 15
- Lagerelement
- 16
- Aufnahme
- 17
- Formschlussring
- 18
- Boden
- 19
- Mittel/Stößel
- 20
- Sechskantausnehmung
- 21
- Vorsprung
- 22
- Ausnehmung
- 23
- Axialspalt
- 24
- Kopf
- 25
- Achse
- 26
- Wälzlagerelement
- 27
- Lagernut
- 28
- Aufnahme/Lasche
- 29
- Gelenkverbinder
- 30
- Achse
- 31
- Achse
- 32
- Ende
- 33
- Führungsnut
- 34
- Arbeitsraum
- 35
- Arbeitsraum
- 36
- Greifelement
- 37
- Greifelement
- 38
- Abfrageeinrichtung
Claims (15)
- Pneumatisch betreibbares Arbeitsgerät (1), insbesondere zur Verwendung im Karosseriebau der Kraftfahrzeugindustrie, mit einem Zylinder (3), der ein Zylindergehäuse (4), einen in diesem verschieblichen Kolben (6) und eine mit diesem verbundene, linear verschiebliche und aus dem Zylindergehäuse (4) herausgeführte, nicht längenveränderliche Kolbenstange (7) aufweist, sowie mit einem mit dem Zylindergehäuse (4) verbundenen Kopfgehäuse (5), wobei ein in das Kopfgehäuse (5) ragender Bereich der Kolbenstange (7) mit mindestens einem Kniehebel (8) zum Schwenken eines dem Kniehebel (8) zugeordneten Arms (2), insbesondere Greifarms oder Spannarms, zusammenwirkt, wobei dieser Arm (2) im Kopfgehäuse (5) gelagert und zwischen einer geschlossenen Stellung und einer geöffneten Stellung schwenkbar ist, dadurch gekennzeichnet, dass die geöffnete Stellung dieses Arms (2) stufenlos einstellbar ist, wobei die Kolbenstange (7) einen Gewindeabschnitt (10) aufweist und im Bereich des Gewindeabschnitts (10) ein in Längsrichtung der Kolbenstange (7) verstellbares Anschlagteil (11) aufnimmt, das in der geöffneten Stellung dieses Arms (2) an einer bezüglich des Kopfgehäuses (5) stationären Anlage (12) anliegt, sowie die Kolbenstange (7) bezüglich deren Längsachse (13) drehbar ist und im Bereich dessen dem Kniehebel (8) zugewandten Endes ein Lagerelement (15) für den Kniehebel (8) aufnimmt, wobei die Kolbenstange (7) bezüglich des Lagerelements (15) drehbar ist.
- Arbeitsgerät nach Anspruch 1, dadurch gekennzeichnet, dass das Anschlagteil (11) drehfest im Kopfgehäuse (5) positioniert ist.
- Arbeitsgerät nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die stationäre Anlage (12) als Anlagefläche des Kopfgehäuses (5) ausgebildet ist.
- Arbeitsgerät nach Anspruch 3, dadurch gekennzeichnet, dass die Anlagefläche (12) sich orthogonal zur Längsachse (13) der Kolbenstange (7) erstreckt.
- Arbeitsgerät nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, dass das Gewinde des Gewindeabschnitts (10) zwischen Kolbenstange (7) und Anschlagteil (11) selbsthemmend ist.
- Arbeitsgerät nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, dass ein dem Kopfgehäuse (5) abgewandter Boden (18) des Zylindergehäuses (4) Mittel (19) zum Drehen der Kolbenstange (7) in der geschlossenen Stellung des Arms (2) bei im Bereich des Bodens (18) angeordnetem Kolben (6) aufweist.
- Arbeitsgerät nach einem der Ansprüche 1 bis 6, dadurch gekennzeichnet, dass ein dem Kopfgehäuse (5) abgewandter Boden (18) des Zylindergehäuses (4) Mittel (19) zum axialen Verschieben der Kolbenstange (7) in der geschlossenen Stellung des Arms (2) bei im Bereich des Bodens (18) angeordnetem Kolben (6) zwecks Herausbewegen des Kniehebels (8) aus einer Übertotpunktstellung aufweist.
- Arbeitsgerät nach Anspruch 6 oder 7, dadurch gekennzeichnet, dass die Mittel (19) zum axialen Verschieben der Kolbenstange (7) die Mittel (19) zum Drehen der Kolbenstange (7) umfassen.
- Arbeitsgerät nach einem der Ansprüche 1 bis 8, dadurch gekennzeichnet, dass es einen einzigen Kniehebel (8) zum Schwenken eines diesem zugeordneten Arms (2) aufweist, oder zwei Kniehebel (8, 8) aufweist, wobei jeder der beiden Kniehebel (8, 8) dem Schenken eines diesem Kniehebel (8) zugeordneten Arms (2) dient.
- Arbeitsgerät nach Anspruch 9, dadurch gekennzeichnet, dass das Lagerelement (15) auf abgewandten Seiten Aufnahmen (28) zur schwenkbaren Lagerung von zwei Gelenkverbindern (29) aufweist, die im Bereich deren dem Lagerelement (15) abgewandten Enden schwenkbar mit den beiden Armen (2) in Abstand zu den Schwenkachsen (9) der Arme (2) verbunden sind, wobei die Schwenkachsen (9, 30, 31) der Gelenkverbinder (29) und der Arme (2) parallel zueinander angeordnet sind.
- Arbeitsgerät nach Anspruch 10, dadurch gekennzeichnet, dass das Lagerelement (15), die Gelenkverbinder (29) und die Arme (2) symmetrisch zu einer durch die Längsachse (13) der Kolbenstange (7) verlaufenden Ebene angeordnet sind.
- Arbeitsgerät nach einem der Ansprüche 1 bis 11, dadurch gekennzeichnet, dass das Lagerelement (15) in einer Führung (27) des Kopfgehäuses (5) in Richtung der Längsachse (13) der Kolbenstange (7) geführt ist.
- Arbeitsgerät nach Anspruch 12, dadurch gekennzeichnet, dass das Lagerelement (15) mittels einer Gleit- und/oder Wälzlagerung in einer Führung (27) des Kopfgehäuses (5) gelagert ist.
- Arbeitsgerät nach Anspruch 12 oder 13, dadurch gekennzeichnet, dass die Führung (27) zueinander parallele Führungsflächen aufweist, die parallel zur Schwenkachse (9) des Arms (2) angeordnet sind.
- Arbeitsgerät nach einem der Ansprüche 1 bis 14, dadurch gekennzeichnet, dass der Kniehebel (8) bzw. die Kniehebel (8) in der geschlossenen Stellung des Arms (2) bzw. der Arme (2) in einer Übertotpunktstellung angeordnet sind.
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14160861.2A EP2921260B1 (de) | 2014-03-20 | 2014-03-20 | Pneumatisch betreibbares Arbeitsgerät |
| EP14164124.1A EP2921261B2 (de) | 2014-03-20 | 2014-04-10 | Pneumatisch betreibbares Arbeitsgerät |
| PCT/EP2015/055901 WO2015140288A1 (de) | 2014-03-20 | 2015-03-20 | Pneumatisch betreibbares arbeitsgerät |
| US14/907,700 US10016878B2 (en) | 2014-03-20 | 2015-03-20 | Pneumatically operable work tool |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14160861.2A EP2921260B1 (de) | 2014-03-20 | 2014-03-20 | Pneumatisch betreibbares Arbeitsgerät |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2921260A1 true EP2921260A1 (de) | 2015-09-23 |
| EP2921260B1 EP2921260B1 (de) | 2016-08-31 |
Family
ID=50336159
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14160861.2A Not-in-force EP2921260B1 (de) | 2014-03-20 | 2014-03-20 | Pneumatisch betreibbares Arbeitsgerät |
| EP14164124.1A Active EP2921261B2 (de) | 2014-03-20 | 2014-04-10 | Pneumatisch betreibbares Arbeitsgerät |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP14164124.1A Active EP2921261B2 (de) | 2014-03-20 | 2014-04-10 | Pneumatisch betreibbares Arbeitsgerät |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10016878B2 (de) |
| EP (2) | EP2921260B1 (de) |
| WO (1) | WO2015140288A1 (de) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112916817A (zh) * | 2019-12-06 | 2021-06-08 | 汉达精密电子(昆山)有限公司 | 压铸件抓取装置 |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10786886B2 (en) * | 2016-11-01 | 2020-09-29 | Dominion Technologies Group, Inc. | Pneumatic crankshaft clamp assembly |
| KR102032416B1 (ko) * | 2019-02-25 | 2019-10-15 | 김용구 | 내열형 에어 클램프 장치 |
| CN113500540A (zh) * | 2021-07-28 | 2021-10-15 | 沭阳鑫洪锐金属制品有限公司 | 一种连接紧固件 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE29615157U1 (de) | 1996-01-09 | 1996-11-07 | Tünkers Maschinenbau GmbH, 40880 Ratingen | Kniehebelspann- und Greifvorrichtung |
| EP1336452A1 (de) * | 2002-02-13 | 2003-08-20 | Kabushiki Kaisha Kosmek | Vorrichtung zur Überwachung des Spannzustands einer Spannvorrichtung |
| DE102004040606B3 (de) | 2004-08-21 | 2006-01-12 | Tünkers Maschinenbau Gmbh | Als Gripper ausgebildete Kniehebelspannvorrichtung, insbesondere zur Verwendung im Karosseriebau der Kfz-Industrie |
| USRE41223E1 (en) | 1998-01-07 | 2010-04-13 | Norgren Automotive, Inc. | Clamp with improved internal cam action |
| EP2241402A1 (de) | 2009-04-16 | 2010-10-20 | VEP Automation S.r.l. | Vorrichtung zum Verriegeln von Werkstücken |
| EP2548700A1 (de) | 2011-07-20 | 2013-01-23 | UNIVER S.p.A. | Pneumatisch betriebenes Arbeitsgerät |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB709285A (en) * | 1951-08-09 | 1954-05-19 | James Arthur Holt | Improvements in clamps and other gripping devices |
| US3027155A (en) * | 1958-12-23 | 1962-03-27 | Transfer Tools Ltd | Means for releasably clamping articles |
| US3347542A (en) * | 1965-04-19 | 1967-10-17 | Seizer Power Clamp Inc | Toggle clamp |
| DE3130942A1 (de) * | 1981-08-05 | 1983-04-28 | Tünkers Maschinenbau GmbH, 4030 Ratingen | Druckmittelbetaetigbare kniehebelspannvorrichtung mit elastischem federgelenk und loesbar befestigtem spannarm |
| US4458889A (en) * | 1982-09-29 | 1984-07-10 | Dover Corporation (De-Sta-Co. Div.) | Locking power clamp |
| US4494739A (en) * | 1983-03-04 | 1985-01-22 | State Die & Engineering, Inc. | Power operated rotatable clamping assembly |
| US4529182A (en) * | 1983-04-11 | 1985-07-16 | State Die & Engineering, Inc. | Wide opening gripping jaw assembly |
| US4620696A (en) * | 1983-08-10 | 1986-11-04 | Blatt Leland F | Power clamp |
| US4576367A (en) * | 1985-01-02 | 1986-03-18 | Aladdin Engineering & Mfg. Co. | Pneumatic mechanical clamp including locking means |
| FR2630953B1 (fr) * | 1988-05-06 | 1991-04-05 | Genus Int | Dispositif de bridage pour plaques ou profiles l'un contre l'autre |
| DE4238613A1 (de) * | 1992-11-16 | 1994-05-19 | Smw Schneider & Weishaupt Gmbh | Selbstzentrierende Lünette |
| US6056281A (en) * | 1997-10-03 | 2000-05-02 | Phd, Inc. | Adjustable stoppers and mounting assemblies for parts grippers |
| US5853211A (en) * | 1997-01-10 | 1998-12-29 | Btm Corporation | Universal gripper |
| JP3293802B2 (ja) * | 1999-07-07 | 2002-06-17 | エスエムシー株式会社 | 位置検出機能付きチャック |
| GB2359512B (en) * | 1999-11-26 | 2004-01-21 | Hmc Brauer Ltd | Power clamps |
| DE10013874B4 (de) † | 2000-03-21 | 2013-04-18 | De-Sta-Co Metallerzeugnisse Gmbh | Kniehebelspannvorrichtung mit Öffnungswinkelbegrenzung |
| DE20012710U1 (de) * | 2000-07-22 | 2000-11-23 | Röhm GmbH, 89567 Sontheim | Lünette |
| DE20018114U1 (de) † | 2000-10-23 | 2002-02-28 | DE-STA-CO Metallerzeugnisse GmbH, 61449 Steinbach | Elektrisch betätigbare Werkstück-Spannvorrichtung |
| WO2002074503A1 (en) * | 2001-03-16 | 2002-09-26 | Phd, Inc. | Gripper provided with an adjustable sensor assembly |
| US6488273B2 (en) * | 2001-04-20 | 2002-12-03 | Btm Corporation | Powered pivot unit |
| DE10135280A1 (de) * | 2001-07-19 | 2003-02-06 | Rudolf Kohlert | Spannelement zum positionsflexiblen Spannen von Werkstücken |
| JP2004090163A (ja) * | 2002-08-30 | 2004-03-25 | Smc Corp | クランプ装置 |
| JP4789006B2 (ja) * | 2006-07-31 | 2011-10-05 | Smc株式会社 | クランプ装置 |
-
2014
- 2014-03-20 EP EP14160861.2A patent/EP2921260B1/de not_active Not-in-force
- 2014-04-10 EP EP14164124.1A patent/EP2921261B2/de active Active
-
2015
- 2015-03-20 WO PCT/EP2015/055901 patent/WO2015140288A1/de active Application Filing
- 2015-03-20 US US14/907,700 patent/US10016878B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE29615157U1 (de) | 1996-01-09 | 1996-11-07 | Tünkers Maschinenbau GmbH, 40880 Ratingen | Kniehebelspann- und Greifvorrichtung |
| USRE41223E1 (en) | 1998-01-07 | 2010-04-13 | Norgren Automotive, Inc. | Clamp with improved internal cam action |
| EP1336452A1 (de) * | 2002-02-13 | 2003-08-20 | Kabushiki Kaisha Kosmek | Vorrichtung zur Überwachung des Spannzustands einer Spannvorrichtung |
| DE102004040606B3 (de) | 2004-08-21 | 2006-01-12 | Tünkers Maschinenbau Gmbh | Als Gripper ausgebildete Kniehebelspannvorrichtung, insbesondere zur Verwendung im Karosseriebau der Kfz-Industrie |
| EP2241402A1 (de) | 2009-04-16 | 2010-10-20 | VEP Automation S.r.l. | Vorrichtung zum Verriegeln von Werkstücken |
| EP2548700A1 (de) | 2011-07-20 | 2013-01-23 | UNIVER S.p.A. | Pneumatisch betriebenes Arbeitsgerät |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112916817A (zh) * | 2019-12-06 | 2021-06-08 | 汉达精密电子(昆山)有限公司 | 压铸件抓取装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2921261A1 (de) | 2015-09-23 |
| EP2921261B1 (de) | 2016-11-02 |
| EP2921261B2 (de) | 2020-01-22 |
| US20160167202A1 (en) | 2016-06-16 |
| US10016878B2 (en) | 2018-07-10 |
| WO2015140288A1 (de) | 2015-09-24 |
| EP2921260B1 (de) | 2016-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2763820B1 (de) | Greif- oder spannvorrichtung | |
| EP3012923B1 (de) | Presszange | |
| DE2916312C2 (de) | Greifzange für Handhabungsgeräte | |
| EP0481275A1 (de) | Werkzeugwechsler für Werkzeuge einer Werkzeugmaschine | |
| WO2014009083A1 (de) | Crimpwerkzeug für aderendhülsen | |
| EP2921260B1 (de) | Pneumatisch betreibbares Arbeitsgerät | |
| DE202016008355U1 (de) | Betätigungsvorrichtung vom Gelenkhebel- oder Nockentyp zur genauen Positionierung eines schwenkbaren Arms | |
| DE102016105586B3 (de) | Anschlagmodul zum positionsgenauen Anhalten eines Gegenstands | |
| DE102005021460A1 (de) | Verstelleinrichtung für Kupplungen und Getriebebremsen, insbesondere von Kraftfahrzeugen zum Verstellen eines einen Auflage- und Drehpunkt eines gebogenen Hebels bildenden Auflagerelements | |
| DE102018002358B4 (de) | Kniehebelspannvorrichtung, zur Verwendung im Karosseriebau der Kfz-Industrie mit zusätzlichem Widerlager am Kniehebelgelenkelement | |
| DE102007050353A1 (de) | Greifvorrichtung | |
| DE102011016666A1 (de) | Vorrichtung zum Betreiben eines Greif- oder Bewegungswerkzeugs durch einen elektrischen Stellantrieb | |
| EP3370890B1 (de) | Vorrichtung zum anstellen einer stauchwalze eines stauchgerüsts | |
| DE3309513A1 (de) | Schraubstock | |
| EP3101304B1 (de) | Scheibenbremse | |
| DE102014005657C5 (de) | Anschlagmodul | |
| DE102021000171B3 (de) | Kniehebelspannvorrichtung mit geradliniger Spannkraft und Spindelantrieb | |
| DE69301651T2 (de) | Spannkopf | |
| DE2232709A1 (de) | Betaetigungs- oder kraftverstaerkungseinrichtung | |
| EP3050673A1 (de) | Spannvorrichtung | |
| DE102011102905B3 (de) | Kniehebelspannvorrichtung, insbesondere für Karosserieteile der Kfz-Industrie | |
| EP2985216A1 (de) | Handbetätigte gebereinheit | |
| DE29815832U1 (de) | Vorrichtung zum lösbaren Einspannen eines Werkstücks | |
| DE102022117144B4 (de) | Zangenwerkzeug mit asymmetrischem Keil | |
| EP2218548B1 (de) | Gelenkverbindung zum Umwandeln einer Linearbewegung in eine Schwenkbewegung und Spannvorrichtung mit einer solchen Gelenkverbindung |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20140918 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: BA ME |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: B25B 5/12 20060101ALI20151124BHEP Ipc: B25B 5/06 20060101AFI20151124BHEP |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160112 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| RIN1 | Information on inventor provided before grant (corrected) |
Inventor name: RAIMONDI, STEFANO |
|
| INTG | Intention to grant announced |
Effective date: 20160523 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AL AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO RS SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502014001334 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 824579 Country of ref document: AT Kind code of ref document: T Effective date: 20161015 |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MP Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161130 Ref country code: RS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161201 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20170322 Year of fee payment: 4 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170102 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161130 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502014001334 Country of ref document: DE |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20170331 Year of fee payment: 4 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20170601 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170320 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170331 Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170320 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170331 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20180320 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180320 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180320 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20140320 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160831 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161231 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 824579 Country of ref document: AT Kind code of ref document: T Effective date: 20190320 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190320 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20220523 Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502014001334 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20231003 |