EP2306429A1 - Vorrichtungen und Verfahren zur Klassifizierung von Fahrzeugen - Google Patents
Vorrichtungen und Verfahren zur Klassifizierung von Fahrzeugen Download PDFInfo
- Publication number
- EP2306429A1 EP2306429A1 EP09450190A EP09450190A EP2306429A1 EP 2306429 A1 EP2306429 A1 EP 2306429A1 EP 09450190 A EP09450190 A EP 09450190A EP 09450190 A EP09450190 A EP 09450190A EP 2306429 A1 EP2306429 A1 EP 2306429A1
- Authority
- EP
- European Patent Office
- Prior art keywords
- vehicle
- light
- data
- light pattern
- license plate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/015—Detecting movement of traffic to be counted or controlled with provision for distinguishing between two or more types of vehicles, e.g. between motor-cars and cycles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/017—Detecting movement of traffic to be counted or controlled identifying vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/04—Detecting movement of traffic to be counted or controlled using optical or ultrasonic detectors
Definitions
- the present invention relates to devices and methods for classifying objects, in particular vehicles, on a roadway.
- the classification of roadway objects is of great importance for road toll or parking fee systems in order to realize class-based tariff models.
- various constructions are currently used, such as induction loops embedded in the roadway, light barriers on the roadside or road-mounted radar or laser scanners.
- the former can only detect the size of vehicles, the latter while the entire surface contour of the vehicles as a 3D relief, but are technically complex and correspondingly expensive.
- the invention has for its object to provide methods and apparatus for object classification, which are simpler and less expensive than the known solutions.
- This object is achieved in a first aspect of the invention with a device of the type mentioned above, which is characterized by a working on the light-path method, directed to the road sensor to detect the surface contour of an object, and connected to the sensor Evaluation device which classifies the object based on the detected surface contour.
- the light-section method known in the art is used for the first time for the classification of roadway objects, in particular vehicles.
- Light-section sensors project structured light, eg a single light line ("light fan” or "light stroke"), a multitude of parallel light lines (“fringe projection”) or an entire light grid at a first angle to an object to be detected and take the object with you the structure projected thereon from an angle deviating from the projection direction, whereby the surface contour of the object can be determined from the distortions of the structure in the recorded image.
- the use of the light section method for vehicle classification has the advantage that it requires a significantly lower computational outlay for image evaluation than laser scanner methods, because only individual light lines or light grid points in the camera image have to be detected and evaluated.
- the senor comprises a light pattern projector which projects a light pattern, preferably light grating, onto the roadway from a first location, and a camera which receives the projected light pattern from a second location and from whose distortions the surface contour is detected, as in the art known.
- a particularly advantageous embodiment of the invention is characterized in that the light pattern projector additionally projects a light mark, which the camera takes with.
- the light marking is preferably a lettering and / or a machine-readable code, preferably a barcode ("barcode").
- barcode a machine-readable code
- the evaluation of the camera images can be substantially facilitated: the light marking can identify individual light lines of the light pattern, for example, in order to facilitate their automatic detection in the camera image; the light marking can also be integrated directly into the light pattern or its lines for this purpose.
- the light mark can also be used in a particularly advantageous manner for evidence in traffic monitoring and control, for example, when recording location and time of the camera image indicates:
- a traffic offense in the recorded image "projected into”, which is high evidential value the picture has.
- Both a human-readable label and a corresponding machine-readable code, which contains such data, are suitable for this purpose.
- the senor has in known manner at least two light pattern projectors at mutually different first locations to avoid shadowing of the object; It is understood that the camera and the evaluation must be designed accordingly to distinguish the originating from the individual light pattern projectors light pattern in the image, for example, by various coding (marking) of the light pattern, using different wavelengths for the light pattern, operating the light pattern projectors in time-division multiplexing etc.
- a combination of code and projection light stroke such as a line-integrated "Morse" code, are also well suited.
- This integrated coding of the lines makes it possible to distinguish between a plurality of projected lines, possibly from different light sources, and the initial system configuration or calibration is thereby made considerably easier.
- a dashed line can be projected whose stroke distance or length contains the coding. The generation of such lines is very easy by means of the light sources downstream panels possible.
- each of the light pattern projectors may be of any type known in the art. It is particularly advantageous if the light pattern projector is a laser or light-emitting diode radiator, as a result of which high luminance densities can be achieved.
- the use according to the invention of light-section sensors for vehicle classification has the additional advantage that existing traffic surveillance cameras for the camera of the sensor can be used. This facilitates the installation of such a system in the context of existing traffic surveillance systems.
- Pedestrians are detected and classified on the carriageway.
- One possible embodiment is a vehicle or pedestrian traffic light control based thereon.
- the invention provides a system for identity verification of vehicles, which is based on the described classification devices and distinguished by a classification device of the kind presented here for obtaining classification data of a vehicle, a vehicle registration device for obtaining license plate data of a vehicle, a database for linking the classification and license plate data to identity data of a vehicle, and an evaluation device which displays two vehicles as ident if their identity data is the same.
- the identity data represent a kind of "fingerprint" of a vehicle, with which, for example, it can be checked whether the license plate of the vehicle was exchanged in an inadmissible manner or under a certain license plate an invalid type of vehicle is operated, etc.
- the classification device and the license plate detection device use a common camera.
- the identity check can be carried out with the same hardware as the vehicle classification and it is mainly necessary to special software in the evaluation for automatic license plate recognition.
- An advantageous application of the system according to the invention is that it monitors the entry and exit of a parking lot and displays when the identity data of an outgoing vehicle from the data stored in the database identity data of a previously retracted vehicle with the same License plate data differ from each other.
- an anti-theft device for parking spaces for example in multi-storey car parks, can be realized, which gives alarm when license plates are remounted in order to prevent a vehicle from being stolen under a foreign license plate.
- the invention provides a method for classifying objects, in particular vehicles, on a roadway, with the steps
- the invention also provides a method for identity verification of vehicles, with the steps
- Performing the classification method presented here on a second-occurrence vehicle to obtain classification data of the vehicle acquiring characteristic data of the vehicle and linking the classification and characteristic data to identity data of the second-occurrence vehicle, and Recognizing the first-occurrence vehicle and the second-occurrence vehicle as ident if their identity data is the same.
- a device 1 for the classification of vehicles 2 on a roadway 3 is shown.
- the device 1 has a sensor 4 operating according to the light-section method, which is mounted on a bridge carrier 5 spanning the roadway 3 and is connected to an evaluation device 6.
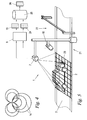
- the sensor 4 comprises, on the one hand, a light pattern projector 7 which projects a light pattern 9 onto the roadway 3 from a first location, in this case an upper support 8 of the bridge 5, and on the other hand a camera 10, which extends from a second location - here a lower support 11 of the bridge 5 - takes a picture 12 of the projected light pattern 9, as shown by way of example in FIGS FIGS. 2 and 3 is shown.
- the evaluation device 6 determines the surface contour of the vehicle 2 from the distortions of the light pattern 9 in the image 12, as they occur through the surface relief of a vehicle 2 from the viewing angle of the camera 8 deviating from the light projection direction, and generates therefrom classification data 13 of the vehicle 2, like its Size, number of axles etc.
- the light pattern 9 can be both a single light line ("light stroke"), a group of parallel light lines ("fringe projection") and a light grid, as shown in FIG Fig. 2 is shown. How out Fig. 2 can be seen, the light pattern 9, for example, consist of a grid of each spaced by 1 m light lines, so that a size classification in the meter range can be performed by merely counting the projected to a vehicle 2 grid crossing points.
- Circle patterns 9 are possible, for example, those in Fig. 4 Circle patterns shown in plan view 14. Circles, when projected onto a cylindrical body, eg a tanker truck, and viewed at a certain angle, provide a straightforward straight line to be detected when the circle diameter corresponds to the cylinder body diameter, from which, for example, the diameter of tanker trucks can be determined ,
- the light pattern projector 7 is preferably a laser radiator whose laser beams are brought into a line, fringe or lattice form by a lens or a diffraction grating.
- the light pattern projector 7 can also be constructed with the aid of high-performance light emitting diodes (LED). It is also possible to arrange more than one light pattern projector 7 at different positions, e.g. to illuminate the roadway 3 or the vehicle 2 from different angles in order to avoid shadowing.
- Fig. 3 shows such a variant in which by means of a first light pattern projector, a first family of 15 parallel lines of light from one side and with the aid of a second light pattern projector, a second family 16 of parallel light lines from another side on the roadway 3 and the vehicle 2 are projected. So that the camera 10 and / or the evaluation device 6 can correctly assign the light lines in the image 12 to the light pattern projectors, the flocks 15, 16 are emitted, for example, with different wavelengths in the time multiplex or with different modulations or codings, as known in the art.
- the light pattern projectors 7 and the camera 10 may be arranged at arbitrary different positions as long as the projected light pattern is picked up from a direction deviating from its projection direction.
- the light pattern projector 7 can continuously emit the light pattern 9, but also intermittently or in pulses as needed, e.g. when the presence of a vehicle 2 on the lane 3 is detected. With such a pulsed operation, a higher light output can also be generated in the short term ("flash of light”) to reduce the image contrast in unfavorable ambient light conditions, e.g. bright sunshine, to improve.
- the light-section sensor 4 can then also be used to detect the mere presence of a vehicle 2 in order to trigger further actions, such as a subsequent classification with the aid of the device 1.
- a trigger in the simplest case only a single light line needs to be projected and its course in the image 12 monitored for a disturbance, e.g. a kink or a break, which can be monitored with very simple image processing means.
- the light pattern projector 7 in addition to the light pattern 9 and a light mark 15, 16 project, which is held by the camera 10 in the image 12.
- the light marker may be a human-readable label 15 and / or a machine-readable code 16, eg, a 1- or 2-dimensional barcode.
- the image 12 taken by the camera 10 can be very tamper-proof Labeling example of the location and the time of image capture and / or other environmental parameters are provided, which can be of great help for evidence in traffic control and in the punishment of traffic offenses.
- Fig. 5 shows an application of the device 1 of Fig. 1 to 4 as part of a system 21 for checking the identity of vehicles 2, preferably at the entrance and exit 22 of a parking lot, such as a parking garage.
- the system 21 comprises on the one hand a device 1 according to Fig. 1 with a light pattern projector 7 and a camera 10 for detecting the surface contour of a vehicle 2 and for determining classification data therefrom.
- the system 21 is equipped with a device for detecting a license plate 23 of the vehicle 2, which device can work with the same hardware as the device 1, ie with the camera 10 and the evaluation device 6.
- the evaluation device 6 a software module for optical Character recognition (optical character recognition, OCR) of the tag 23 included.
- the evaluation device 6 generates here in addition to the classification data 13 and license plate data 24 for a vehicle 2 and links this data in a database 25 to identity data 26 of a vehicle 2.
- the identity data 26 thus represent a kind of "fingerprint" of a vehicle 2, because they next the license plate 23 also contain other properties of the vehicle, eg its size, shape, number of axes, etc.
- identity checks can be made on vehicles 2, for example plausibility, as to whether the vehicle for which the license plate has been approved actually falls into the vehicle class specified in the identity data.
- the system 21 can also determine whether two consecutively occurring Vehicles 2 are identical or not by comparing the identity data 26.
- a preferred application of the system 21 is e.g. theft prevention of vehicles in a parking lot, e.g. in parking garages.
- the system 21 compares the identity data 26 of all incoming and outgoing vehicles and raises an alarm when discrepancies in the identity data 26 arise, for example because license plates have been changed over.
- an image recording of the vehicle can be made with the camera 10, an exit barriers are kept closed, etc.
- the system 21 is preferably put into operation by right of way at the entrance and exit barriers.
- the light pattern projector 7 is here pulsed ("flash of light") driven to the light section classification of the persistent vehicle before the barrier.
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Traffic Control Systems (AREA)
- Radar Systems Or Details Thereof (AREA)
- Sorting Of Articles (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Optical Radar Systems And Details Thereof (AREA)
- Geophysics And Detection Of Objects (AREA)
Abstract
Description
- Die vorliegende Erfindung betrifft Vorrichtungen und Verfahren zur Klassifizierung von Objekten, insbesondere Fahrzeugen, auf einer Fahrbahn.
- Das Klassifizieren von Fahrbahnobjekten ist für Straßenmaut- oder Parkgebührensysteme von großer Bedeutung, um klassenabhängige Tarifmodelle realisieren zu können. Zum Klassifizieren von Fahrzeugen werden derzeit verschiedenste Konstruktionen eingesetzt, wie in die Fahrbahn eingebettete Induktionsschleifen, Lichtschranken am Fahrbahnrand oder über der Fahrbahn montierte Radar- oder Laserscanner. Erstere können lediglich die Größe von Fahrzeugen erfassen, letztere zwar die gesamte Oberflächenkontur der Fahrzeuge als 3D-Relief, sind jedoch technisch aufwendig und entsprechend kostspielig.
- Die Erfindung setzt sich zum Ziel, Verfahren und Vorrichtungen zur Objektklassifizierung zu schaffen, welche einfacher und kostengünstiger sind als die bekannten Lösungen.
- Dieses Ziel wird in einem ersten Aspekt der Erfindung mit einer Vorrichtung der eingangs genannten Art erreicht, die sich durch einen nach dem Lichtschnitt-Verfahren arbeitenden, auf die Fahrbahn gerichteten Sensor auszeichnet, um die Oberflächenkontur eines Objekts zu erfassen, und eine an den Sensor angeschlossene Auswerteeinrichtung, welche das Objekt anhand der erfaßten Oberflächenkontur klassifiziert.
- Auf diese Weise wird erstmals das in der Technik bekannte Lichtschnitt-Verfahren für die Klassifizierung von Fahrbahnobjekten, insbesondere Fahrzeugen, eingesetzt. LichtschnittSensoren projizieren strukturiertes Licht, z.B. eine einzige Lichtlinie ("Lichtfächer" bzw. "Lichtstrich"), eine Vielzahl paralleler Lichtlinien ("Lichtfransen", sog. "fringe projection") oder gleich ein ganzes Lichtgitter unter einem ersten Winkel auf ein zu erfassendes Objekt und nehmen das Objekt mit der darauf projizierten Struktur aus einem von der Projektionsrichtung abweichenden Winkel auf, wodurch aus den Verzerrungen der Struktur im aufgenommenen Bild die Oberflächenkontur des Objekts ermittelt werden kann. Der Einsatz des Lichtschnitt-Verfahrens zur Fahrzeugklassifikation hat den Vorteil, daß es einen wesentlich geringeren Rechenaufwand zur Bildauswertung benötigt als Laserscannerverfahren, weil lediglich einzelne Lichtlinien oder Lichtgitterpunkte im Kamerabild detektiert und ausgewertet werden müssen. Demgemäß umfaßt der Sensor einen Lichtmusterprojektor, der von einem ersten Ort aus ein Lichtmuster, bevorzugt Lichtgitter, auf die Fahrbahn projiziert, und eine Kamera, die von einem zweiten Ort aus das projizierte Lichtmuster aufnimmt und aus dessen Verzerrungen die Oberflächenkontur erfaßt, wie in der Technik bekannt.
- Eine besonders vorteilhafte Ausführungsform der Erfindung zeichnet sich dadurch aus, daß der Lichtmusterprojektor zusätzlich eine Lichtmarkierung projiziert, welche die Kamera mit aufnimmt. Bevorzugt ist die Lichtmarkierung eine Beschriftung und/oder ein maschinenlesbarer Code, bevorzugt ein Strichcode ("Barcode"). Dadurch kann die Auswertung der Kamerabilder wesentlich erleichtert werden: Die Lichtmarkierung kann beispielsweise einzelne Lichtlinien des Lichtmusters kennzeichnen, um deren automatische Detektion im Kamerabild zu erleichtern; die Lichtmarkierung kann zu diesem Zweck auch direkt in das Lichtmuster bzw. dessen Linien integriert sein. Anderseits kann die Lichtmarkierung in besonders vorteilhafter Weise auch zu Beweiszwecken in der Verkehrsüberwachung und -kontrolle dienen, z.B. wenn sie Aufnahmeort und -zeit des Kamerabildes angibt: Damit können Ort und Zeit eines Verkehrsvergehens in das aufgenommene Bild "hineinprojiziert" werden, was hohe Beweiskraft für das Bild hat. Dafür eignet sich sowohl eine menschenlesbare Beschriftung als auch ein entsprechender maschinenlesbarer Code, welcher solche Daten enthält.
- In einer weiteren vorteilhaften Ausführungsform der Erfindung kann vorgesehen werden, daß der Sensor in an sich bekannter Weise zumindest zwei Lichtmusterprojektoren an voneinander verschiedenen ersten Orten aufweist, um Abschattungen am Objekt zu vermeiden; es versteht sich, daß die Kamera und die Auswerteeinrichtung entsprechend dafür ausgelegt sein müssen, um die von den einzelnen Lichtmusterprojektoren stammenden Lichtmuster im Bild auseinanderzuhalten, beispielsweise durch verschiedenartige Codierung (Markierung) der Lichtmuster, Verwendung verschiedener Wellenlängen für die Lichtmuster, Betreiben der Lichtmusterprojektoren im Zeitmultiplexbetrieb usw.
- Eine Kombination von Code und Projektions-Lichtstrich, wie etwa ein in die Line integrierter "Morse"-Code, sind auch gut geeignet. Durch diese integrierte Codierung der Linien ist eine Unterscheidung zwischen mehreren projizierten Linen - eventuell aus unterschiedlichen Lichtquellen - möglich und die initiale System-Konfiguration bzw. Kalibrierung wird dadurch erheblich erleichtert. Beispielsweise ist auch eine strichlierte Linie projizierbar, deren Strich-Abstand oder -Länge die Codierung enthält. Die Erzeugung solcher Linien ist sehr einfach mittels den Lichtquellen nachgeschalteter Blenden möglich.
- Jeder der Lichtmusterprojektoren kann an sich von beliebiger in der Technik bekannter Art sein. Besonders vorteilhaft ist es, wenn der Lichtmusterprojektor ein Laser- oder Leuchtdiodenstrahler ist, wodurch hohe Leuchtdichten erreicht werden können.
- Der erfindungsgemäße Einsatz von Lichtschnittsensoren zur Fahrzeugklassifizierung hat den zusätzlichen Vorteil, daß für die Kamera des Sensors bestehende Verkehrsüberwachungskameras mitverwendet werden können. Dies erleichtert die Montage einer solchen Anlage im Rahmen vorhandener Verkehrsüberwachungssysteme.
- Prinzipiell können auch andere Objekte, z.B. Fußgänger, auf der Fahrbahn detektiert und klassifiziert werden. Eine mögliche Ausführungsform ist eine darauf aufbauende Fahrzeugoder Fußgänger-Ampelsteuerung.
- In einem weiteren Aspekt schafft die Erfindung eine Anlage zur Identitätsprüfung von Fahrzeugen, welche auf den geschilderten Klassifizierungsvorrichtungen aufbaut und sich auszeichnet durch
eine Klassifizierungsvorrichtung der hier vorgestellten Art, um Klassifizierungsdaten eines Fahrzeugs zu erhalten,
eine Vorrichtung zur Kennzeichenerfassung an Fahrzeugen, um Kennzeichendaten eines Fahrzeugs zu erhalten,
eine Datenbank zur Verknüpfung der Klassifizierungs- und Kennzeichendaten zu Identitätsdaten eines Fahrzeugs, und
eine Auswerteeinrichtung, welche zwei Fahrzeuge als ident anzeigt, wenn ihre Identitätsdaten gleich sind. - Die Identitätsdaten stellen eine Art "Fingerabdruck" eines Fahrzeugs dar, mit welchem beispielsweise überprüft werden kann, ob die Kennzeichentafel des Fahrzeugs in unzulässiger Weise ausgetauscht wurde oder unter einem bestimmten Kennzeichen ein unzulässiger Fahrzeugtyp betrieben wird usw.
- Besonders günstig ist es, wenn die Klassifizierungsvorrichtung und die Kennzeichenerfassungsvorrichtung eine gemeinsame Kamera verwenden. Dadurch kann die Identitätsprüfung mit derselben Hardware durchgeführt werden wie die Fahrzeugklassifizierung und es ist vorwiegend um spezielle Software in der Auswerteeinrichtung zur automatischen Kennzeichentafelerkennung erforderlich.
- Eine vorteilhafte Anwendung der erfindungsgemäßen Anlage besteht darin, daß sie die Ein- und Ausfahrt eines Parkplatzes überwacht und anzeigt, wenn die Identitätsdaten eines ausfahrenden Fahrzeugs von den in der Datenbank gespeicherten Identitätsdaten eines zuvor eingefahrenen Fahrzeugs mit denselben Kennzeichendaten voneinander abweichen. Dadurch kann eine Diebstahlssicherung für Parkplätze, z.B. in Parkhäusern, realisiert werden, welche Alarm gibt, wenn Kennzeichentafeln ummontiert werden, um zu verhindern, daß ein Fahrzeug unter einem fremden Kennzeichen entwendet wird.
- In einem weiteren Aspekt schafft die Erfindung ein Verfahren zur Klassifizierung von Objekten, insbesondere Fahrzeugen, auf einer Fahrbahn, mit den Schritten
- Projizieren eines Lichtmusters, bevorzugt Lichtgitters, auf die Fahrbahn von einem ersten Ort aus,
- Aufnehmen des projizierten Lichtmusters von einem zweiten Ort aus, um die Oberflächenkontur eines Objekts aus Verzerrungen des Lichtmusters zu erfassen, und
Klassifizieren des Objekts anhand der erfaßten Oberflächenkontur. - Schließlich schafft die Erfindung auch ein Verfahren zur Identitätsprüfung von Fahrzeugen, mit den Schritten
- Durchführen des hier vorgestellten Klassifizierungsverfahrens an einem erstauftretenden Fahrzeug, um Klassifizierungsdaten des Fahrzeugs zu erhalten, Erfassen von Kennzeichendaten des Fahrzeugs und Verknüpfung der Klassifizierungs- und Kennzeichendaten zu Identitätsdaten des erstauftretenden Fahrzeugs,
- Durchführen des hier vorgestellten Klassifizierungsverfahrens an einem zweitauftretenden Fahrzeug, um Klassifizierungsdaten des Fahrzeugs zu erhalten, Erfassen von Kennzeichendaten des Fahrzeugs und Verknüpfung der Klassifizierungs- und Kennzeichendaten zu Identitätsdaten des zweitauftretenden Fahrzeugs, und
Erkennen des erstauftretenden Fahrzeugs und des zweitauftretenden Fahrzeugs als ident, wenn ihre Identitätsdaten gleich sind. - Hinsichtlich der Vorteile und weiterer Merkmale der erfindungsgemäßen Verfahren wird auf die obigen Ausführungen zur Vorrichtung und Anlage der Erfindung verwiesen.
- Die Erfindung wird nachstehend anhand von in den beigeschlossenen Zeichnungen dargestellten Ausführungsbeispielen näher erläutert. In den Zeichnungen zeigt:
-
Fig. 1 die Vorrichtung und das Verfahren der Erfindung zur Klassifizierung von Fahrzeugen auf einer Fahrbahn anhand einer schematischen Perspektivansicht der Vorrichtung; - die
Fig. 2 bis 4 verschiedene Varianten von Lichtmustern, die auf ein Fahrzeug zwecks Klassifizierung nach dem Lichtschnitt-Verfahren projiziert werden können; und -
Fig. 5 eine erfindungsgemäße Anlage zur Identitätsprüfung von Fahrzeugen in einer schematischen Perspektivansicht. - In
Fig. 1 ist eine Vorrichtung 1 zur Klassifizierung von Fahrzeugen 2 auf einer Fahrbahn 3 gezeigt. Die Vorrichtung 1 weist einen nach dem Lichtschnitt-Verfahren arbeitenden Sensor 4 auf, der an einem die Fahrbahn 3 überspannenden Brückenträger 5 montiert und an eine Auswerteeinrichtung 6 angeschlossen ist. Der Sensor 4 umfaßt einerseits einen Lichtmusterprojektor 7, der von einem ersten Ort - hier einem oberen Träger 8 der Brücke 5 - ein Lichtmuster 9 auf die Fahrbahn 3 projiziert, und anderseits eine Kamera 10, welche von einem zweiten Ort aus - hier einem unteren Träger 11 der Brücke 5 - ein Bild 12 des projizierten Lichtmusters 9 aufnimmt, wie es beispielhaft in denFig. 2 und 3 gezeigt ist. Die Auswerteeinrichtung 6 ermittelt aus den Verzerrungen des Lichtmusters 9 im Bild 12, wie sie durch das Oberflächenrelief eines Fahrzeugs 2 aus dem von der Lichtprojektionsrichtung abweichenden Blickwinkel der Kamera 8 auftreten, die Oberflächenkontur des Fahrzeugs 2 und erzeugt daraus Klassifizierungsdaten 13 des Fahrzeugs 2, wie seine Größe, Achsanzahl usw. - Das Lichtmuster 9 kann sowohl eine einzelne Lichtlinie ("Lichtstrich"), eine Gruppe paralleler Lichtlinien ("Lichtfransen", "fringe projection") als auch ein Lichtgitter sein, wie es in
Fig. 2 gezeigt ist. Wie ausFig. 2 ersichtlich, kann das Lichtmuster 9 beispielsweise aus einem Gitter von jeweils um 1 m beabstandeten Lichtlinien bestehen, sodaß bereits durch bloßes Abzählen der auf ein Fahrzeug 2 projizierten Gitterkreuzungspunkte eine Größenklassifizierung im Meterbereich durchgeführt werden kann. - Auch andere Arten von Lichtmustern 9 sind möglich, beispielsweise die in
Fig. 4 in der Draufsicht gezeigten Kreismuster 14. Kreise ergeben bei Projektion auf einen zylindrischen Körper, z.B. ein Tanklastwagen, und Betrachtung unter einem bestimmten Winkel eine besonders einfach zu detektierende gerade Linie, wenn der Kreisdurchmesser dem Zylinderkörperdurchmesser entspricht, woraus sich z.B. der Durchmesser von Tanklastwagen bestimmen läßt. - Als Kamera 10 kann bevorzugt eine bereits vorhandene Verkehrsüberwachungskamera eingesetzt werden. Der Lichtmusterprojektor 7 ist bevorzugt ein Laserstrahler, dessen Laserstrahlen durch eine Linse oder ein Beugungsgitter in Linien-, Fransenoder Gitterform gebracht werden. Der Lichtmusterprojektor 7 kann auch mit Hilfe von Hochleistungs-Leuchtdioden (LED) aufgebaut werden. Auch ist es möglich, mehr als einen Lichtmusterprojektor 7 an verschiedenen Positionen anzuordnen, z.B. um die Fahrbahn 3 bzw. das Fahrzeug 2 aus unterschiedlichen Winkeln zu beleuchten, um Abschattungen zu vermeiden.
-
Fig. 3 zeigt eine derartige Variante, bei welcher mit Hilfe eines ersten Lichtmusterprojektors eine erste Schar 15 paralleler Lichtlinien von einer Seite und mit Hilfe eines zweiten Lichtmusterprojektors eine zweite Schar 16 paralleler Lichtlinien von einer anderen Seite auf die Fahrbahn 3 bzw. das Fahrzeug 2 projiziert werden. Damit die Kamera 10 und/oder die Auswerteeinrichtung 6 die Lichtlinien im Bild 12 den Lichtmusterprojektoren korrekt zuordnen können, werden die Scharen 15, 16 beispielsweise mit unterschiedlichen Wellenlängen im Zeitmultiplex oder mit verschiedenen Modulationen oder Codierungen versehen ausgestrahlt, wie in der Technik bekannt. - Der bzw. die Lichtmusterprojektoren 7 und die Kamera 10 können an beliebigen unterschiedlichen Positionen angeordnet werden, solange das projizierte Lichtmuster aus einer von seiner Projektionsrichtung abweichenden Richtung aufgenommen wird.
- Der Lichtmusterprojektor 7 kann das Lichtmuster 9 kontinuierlich ausstrahlen, aber auch intermittierend oder impulsweise bei Bedarf, z.B. wenn die Anwesenheit eines Fahrzeugs 2 auf der Fahrbahn 3 erkannt wird. Mit einem solchen Impulsbetrieb kann kurzfristig auch eine höhere Lichtleistung erzeugt werden, ("Lichtblitz"), um den Bildkontrast bei ungünstigen Umgebungslichtverhältnissen, z.B. hellem Sonnenschein, zu verbessern.
- Der Lichtschnitt-Sensor 4 kann dann auch zur Erkennung der bloßen Anwesenheit eines Fahrzeugs 2 herangezogen werden, um weitere Aktionen, wie eine anschließende Klassifizierung mit Hilfe der Vorrichtung 1, auszulösen. Für eine solche Auslösung braucht im einfachsten Fall nur eine einzige Lichtlinie projiziert und ihr Verlauf im Bild 12 auf eine Störung überwacht werden, z.B. einen Knick oder eine Unterbrechung, was mit sehr einfachen Bildverarbeitungsmitteln überwacht werden kann.
- Wie aus
Fig. 2 ersichtlich, kann der Lichtmusterprojektor 7 zusätzlich zum Lichtmuster 9 auch eine Lichtmarkierung 15, 16 projizieren, welche von der Kamera 10 im Bild 12 festgehalten wird. Die Lichtmarkierung kann eine menschenlesbare Beschriftung 15 und/oder ein maschinenlesbarer Code 16 sein, z.B. ein 1- oder 2-dimensionaler Barcode. Dadurch kann das von der Kamera 10 aufgenommene Bild 12 mit einer sehr fälschungssicheren Kennzeichnung z.B. des Ortes und der Zeit der Bildaufnahme und/oder anderer Umgebungsparameter versehen werden, was für Beweiszwecke in der Verkehrsüberwachung und bei der Ahndung von Verkehrsvergehen von großer Hilfe sein kann. -
Fig. 5 zeigt eine Anwendung der Vorrichtung 1 derFig. 1 bis 4 im Rahmen einer Anlage 21 zur Identitätsprüfung von Fahrzeugen 2, bevorzugt an der Ein- und Ausfahrt 22 eines Parkplatzes, z.B. eines Parkhauses. - Die Anlage 21 umfaßt zum einen eine Vorrichtung 1 gemäß
Fig. 1 mit einem Lichtmusterprojektor 7 und einer Kamera 10 zur Erfassung der Oberflächenkontur eines Fahrzeugs 2 und zur Ermittlung von Klassifizierungsdaten daraus. Zum anderen ist die Anlage 21 mit einer Vorrichtung zur Erfassung eines Kennzeichens 23 des Fahrzeugs 2 ausgestattet, welche Vorrichtung mit derselben Hardware wie die Vorrichtung 1 arbeiten kann, d.h. mit der Kamera 10 und der Auswerteeinrichtung 6. Beispielsweise kann die Auswerteeinrichtung 6 ein Softwaremodul zur optischen Zeichenerkennung (optical character recognition, OCR) des Kennzeichens 23 enthalten. - Die Auswerteeinrichtung 6 erzeugt hier zusätzlich zu den Klassifizierungsdaten 13 auch Kennzeichendaten 24 für ein Fahrzeug 2 und verknüpft diese Daten in einer Datenbank 25 zu Identitätsdaten 26 eines Fahrzeugs 2. Die Identitätsdaten 26 stellen somit eine Art "Fingerabdruck" eines Fahrzeugs 2 dar, weil sie neben dem Kennzeichen 23 auch weitere Eigenschaften des Fahrzeugs enthalten, z.B. seine Größe, Form, Achsanzahl usw.
- Auf Grundlage der Identitätsdaten 26 können Identitätsprüfungen an Fahrzeugen 2 vorgenommen werden, beispielsweise auf Plausibilität, ob das Fahrzeug, für welches das Kennzeichen zugelassen wurde, auch tatsächlich in die Fahrzeugklasse fällt, die in den Identitätsdaten angegeben ist. Die Anlage 21 kann aber auch feststellen, ob zwei hintereinander auftretende Fahrzeuge 2 ident sind oder nicht, indem sie die Identitätsdaten 26 vergleicht.
- Eine bevorzugte Anwendung der Anlage 21 ist z.B. die Diebstahlssicherung von Fahrzeugen an einem Parkplatz, z.B. in Parkhäusern. Die Anlage 21 vergleicht die Identitätsdaten 26 aller ein- und ausfahrenden Fahrzeuge und schlägt Alarm, wenn sich Unstimmigkeiten in den Identitätsdaten 26 ergeben, beispielsweise weil Kennzeichen ummontiert wurden. Zusätzlich kann eine Bildaufnahme des Fahrzeugs mit der Kamera 10 veranlaßt werden, ein Ausfahrtsschranken geschlossen gehalten werden, usw. Die Anlage 21 wird dabei bevorzugt durch Vorfahrt an den Ein- und Ausfahrtsschranken in Betrieb gesetzt. Bevorzugt wird der Lichtmusterprojektor 7 hier impulsweise ("Lichtblitz") zur Lichtschnitt-Klassifizierung des vor dem Schranken anhaltende Fahrzeugs angesteuert.
- Die Erfindung ist nicht auf die dargestellten Ausführungsformen beschränkt, sondern umfaßt alle Varianten und Modifikationen, die in den Rahmen der angeschlossenen Ansprüche fallen.
Claims (16)
- Vorrichtung (1) zur Klassifizierung von Objekten (2), insbesondere Fahrzeugen, auf einer Fahrbahn (3), gekennzeichnet durch einen nach dem Lichtschnitt-Verfahren arbeitenden, auf die Fahrbahn (3) gerichteten Sensor (4), um die Oberflächenkontur eines Objekts (2) zu erfassen, und eine an den Sensor (4) angeschlossene Auswerteeinrichtung (6), welche das Objekt (2) anhand der erfaßten Oberflächenkontur klassifiziert.
- Vorrichtung nach Anspruch 1, dadurch gekennzeichnet, daß der Sensor (4) einen Lichtmusterprojektor (7), der von einem ersten Ort (8) aus ein Lichtmuster (9), bevorzugt Lichtgitter, auf die Fahrbahn (3) projiziert, und eine Kamera (10) umfaßt, die von einem zweiten Ort (11) aus das projizierte Lichtmuster (9) aufnimmt und aus dessen Verzerrungen die Oberflächenkontur erfaßt.
- Vorrichtung nach Anspruch 2, dadurch gekennzeichnet, daß der Lichtmusterprojektor (7) zusätzlich eine Lichtmarkierung (15, 16) projiziert, welche die Kamera (10) mit aufnimmt.
- Vorrichtung nach Anspruch 3, dadurch gekennzeichnet, daß die Lichtmarkierung (15, 16) eine Beschriftung (15) und/oder ein maschinenlesbarer Code (16) ist, bevorzugt ein Strichcode.
- Vorrichtung nach einem der Ansprüche 2 bis 4, dadurch gekennzeichnet, daß der Sensor (4) zumindest zwei Lichtmusterprojektoren (7) an voneinander verschiedenen ersten Orten aufweist.
- Vorrichtung nach einem der Ansprüche 2 bis 5, dadurch gekennzeichnet, daß der Lichtmusterprojektor (7) ein Laseroder Leuchtdiodenstrahler ist.
- Vorrichtung nach einem der Ansprüche 2 bis 6, dadurch gekennzeichnet, daß die Kamera (10) eine Verkehrsüberwachungskamera ist.
- Anlage (21) zur Identitätsprüfung von Fahrzeugen (2), gekennzeichnet durch
eine Vorrichtung (1) zur Klassifizierung nach einem der Ansprüche 1 bis 7, um Klassifizierungsdaten (13) eines Fahrzeugs (2) zu erhalten,
eine Vorrichtung zur Kennzeichenerfassung an Fahrzeugen (2), um Kennzeichendaten (24) eines Fahrzeugs (2) zu erhalten,
eine Datenbank (25) zur Verknüpfung der Klassifizierungsund Kennzeichendaten (12, 24) zu Identitätsdaten (26) eines Fahrzeugs (2), und
eine Auswerteeinrichtung (6), welche zwei Fahrzeuge (2) als ident anzeigt, wenn ihre Identitätsdaten (26) gleich sind. - Anlage nach Anspruch 8, dadurch gekennzeichnet, daß die Klassifizierungsvorrichtung und die Kennzeichenerfassungsvorrichtung eine gemeinsame Kamera (10) verwenden.
- Anlage nach Anspruch 8 oder 9, dadurch gekennzeichnet, daß sie die Ein- und Ausfahrt eines Parkplatzes überwacht und anzeigt, wenn die Identitätsdaten (26) eines ausfahrenden Fahrzeugs (2) von den in der Datenbank (25) gespeicherten Identitätsdaten (26) eines zuvor eingefahrenen Fahrzeugs (2) mit denselben Kennzeichendaten (24) voneinander abweichen.
- Verfahren zur Klassifizierung von Objekten (2), insbesondere Fahrzeugen, auf einer Fahrbahn (3), mit den Schritten
Projizieren eines Lichtmusters (9), bevorzugt Lichtgitters, auf die Fahrbahn (3) von einem ersten Ort (8) aus,
Aufnehmen des projizierten Lichtmusters (9) von einem zweiten Ort (11) aus, um die Oberflächenkontur eines Objekts (2) aus Verzerrungen des Lichtmusters (9) zu erfassen, und
Klassifizieren des Objekts (2) anhand der erfaßten Oberflächenkontur. - Verfahren nach Anspruch 11, dadurch gekennzeichnet, daß zusätzlich zu dem Lichtmuster (9) eine Lichtmarkierung (15, 16) projiziert wird, welche mit aufgenommen wird.
- Verfahren nach Anspruch 12, dadurch gekennzeichnet, daß die Lichtmarkierung (15, 16) eine Beschriftung (15) und/oder ein maschinenlesbarer Code (16) ist, bevorzugt ein Strichcode.
- Verfahren nach einem der Ansprüche 11 bis 13, dadurch gekennzeichnet, daß das Lichtmuster und die optionale Lichtmarkierung mit einer Verkehrsüberwachungskamera (10) aufgenommen werden.
- Verfahren zur Identitätsprüfung von Fahrzeugen, mit den Schritten
Durchführen des Verfahrens nach einem der Ansprüche 11 bis 14 an einem erstauftretenden Fahrzeug (2), um Klassifizierungsdaten (12) des Fahrzeugs (2) zu erhalten, Erfassen von Kennzeichendaten (24) des Fahrzeugs (2) und Verknüpfung der Klassifizierungs- und Kennzeichendaten (12, 24) zu Identitätsdaten (26) des erstauftretenden Fahrzeugs (2),
Durchführen des Verfahrens nach einem der Ansprüche 11 bis 14 an einem zweitauftretenden Fahrzeug (2), um Klassifizierungsdaten (12) des Fahrzeugs (2) zu erhalten, Erfassen von Kennzeichendaten (24) des Fahrzeugs (2) und Verknüpfung der Klassifizierungs- und Kennzeichendaten (12, 24) zu Identitätsdaten (26) des zweitauftretenden Fahrzeugs (2), und
Erkennen des erstauftretenden Fahrzeugs (2) und des zweitauftretenden Fahrzeugs (2) als ident, wenn ihre Identitätsdaten (26) gleich sind. - Verfahren nach Anspruch 15, dadurch gekennzeichnet, daß damit die Ein- und Ausfahrt eines Parkplatzes überwacht und ein Alarm ausgegeben wird, wenn die Identitätsdaten (26) eines ausfahrenden Fahrzeugs (2) von den Identitätsdaten (26) eines zuvor eingefahrenen Fahrzeugs (2), das dieselben Kennzeichendaten (24) hat, abweichen.
Priority Applications (14)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ES09450190T ES2384750T3 (es) | 2009-10-01 | 2009-10-01 | Dispositivos y procedimientos para la clasificación de vehículos |
| PT09450190T PT2306429E (pt) | 2009-10-01 | 2009-10-01 | Dispositivos e método para classificação de viaturas |
| AT09450190T ATE550750T1 (de) | 2009-10-01 | 2009-10-01 | Vorrichtungen und verfahren zur klassifizierung von fahrzeugen |
| PL09450190T PL2306429T3 (pl) | 2009-10-01 | 2009-10-01 | Urządzenie i sposób klasyfikacji pojazdów |
| DK09450190.5T DK2306429T3 (da) | 2009-10-01 | 2009-10-01 | Apparat og fremgangsmåde til klassificering af køretøjer |
| SI200930262T SI2306429T1 (sl) | 2009-10-01 | 2009-10-01 | Naprave in postopek za klasificiranje vozil |
| EP09450190A EP2306429B1 (de) | 2009-10-01 | 2009-10-01 | Vorrichtungen und Verfahren zur Klassifizierung von Fahrzeugen |
| AU2010214634A AU2010214634B2 (en) | 2009-10-01 | 2010-08-24 | Devices and methods for classifying vehicles |
| NZ587584A NZ587584A (en) | 2009-10-01 | 2010-08-25 | Classifying vehicles using light section surface contouring |
| ZA2010/06521A ZA201006521B (en) | 2009-10-01 | 2010-09-10 | Devices and method for classifying vehicles |
| CL2010001008A CL2010001008A1 (es) | 2009-10-01 | 2010-09-27 | Dispositivo, conjunto y metodo para clasificar objetos, que emplea un sensor que opera con el procedimiento de seccion de luz y esta dirigido a la calzada para detectar el contorno superficial de un objeto, y una unidad de evaluacion conectada con el sensor, que clasifica al objeto basado en el contorno superficial detectado. |
| CN2010102978523A CN102034087A (zh) | 2009-10-01 | 2010-09-28 | 用于对汽车进行分类的装置和方法 |
| CA2716158A CA2716158A1 (en) | 2009-10-01 | 2010-09-30 | Devices and methods for classifying vehicles |
| US12/896,813 US20110103647A1 (en) | 2009-10-01 | 2010-10-01 | Device and Method for Classifying Vehicles |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP09450190A EP2306429B1 (de) | 2009-10-01 | 2009-10-01 | Vorrichtungen und Verfahren zur Klassifizierung von Fahrzeugen |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2306429A1 true EP2306429A1 (de) | 2011-04-06 |
| EP2306429B1 EP2306429B1 (de) | 2012-03-21 |
Family
ID=41412399
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP09450190A Not-in-force EP2306429B1 (de) | 2009-10-01 | 2009-10-01 | Vorrichtungen und Verfahren zur Klassifizierung von Fahrzeugen |
Country Status (14)
| Country | Link |
|---|---|
| US (1) | US20110103647A1 (de) |
| EP (1) | EP2306429B1 (de) |
| CN (1) | CN102034087A (de) |
| AT (1) | ATE550750T1 (de) |
| AU (1) | AU2010214634B2 (de) |
| CA (1) | CA2716158A1 (de) |
| CL (1) | CL2010001008A1 (de) |
| DK (1) | DK2306429T3 (de) |
| ES (1) | ES2384750T3 (de) |
| NZ (1) | NZ587584A (de) |
| PL (1) | PL2306429T3 (de) |
| PT (1) | PT2306429E (de) |
| SI (1) | SI2306429T1 (de) |
| ZA (1) | ZA201006521B (de) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011053052B3 (de) * | 2011-08-26 | 2013-02-28 | Jenoptik Robot Gmbh | Verfahren und Vorrichtung zur Identifikation von Kraftfahrzeugen zur Verkehrsüberwachung |
| DE102013201821A1 (de) * | 2013-02-05 | 2014-08-07 | GESIG, Gesellschaft für Signalanlagen Gesellschaft m.b.H. | Verfahren und System zur Erfassung von Falschfahrern |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8675090B2 (en) * | 2010-12-15 | 2014-03-18 | Panasonic Corporation | Image generating apparatus, image generating method, and recording medium |
| DE102012102236A1 (de) * | 2012-03-16 | 2013-09-19 | Pilz Gmbh & Co. Kg | Verfahren und Vorrichtung zum Absichern eines gefährlichen Arbeitsbereichs einer automatisiert arbeitenden Maschine |
| US9313379B2 (en) * | 2012-09-24 | 2016-04-12 | Illinois State Toll Highway Authority | Camera washing system |
| TW201430770A (zh) * | 2013-01-18 | 2014-08-01 | Parkinsys Technology Corp | 具有入口管制補強的輔助影像擷取裝置的無票卡停車場 |
| US9398287B2 (en) * | 2013-02-28 | 2016-07-19 | Google Technology Holdings LLC | Context-based depth sensor control |
| SI2804014T1 (sl) | 2013-05-13 | 2015-09-30 | Kapsch Trafficcom Ag | Naprava in postopek za določanje značilnosti vozila |
| JP2015022658A (ja) * | 2013-07-22 | 2015-02-02 | 株式会社東芝 | 車両監視装置、および車両監視方法 |
| CN103794056B (zh) * | 2014-03-06 | 2015-09-30 | 北京卓视智通科技有限责任公司 | 基于实时双路视频流的车型精确分类系统及方法 |
| CN104359921B (zh) * | 2014-11-20 | 2016-11-23 | 中南大学 | 一种基于结构光的扣件缺失检测方法及其装置 |
| EP3026653A1 (de) * | 2014-11-27 | 2016-06-01 | Kapsch TrafficCom AB | Verfahren zur Steuerung eines Verkehrsüberwachungssystems |
| GB2533581B (en) * | 2014-12-22 | 2016-12-07 | Ibm | Image processing |
| CN104575097B (zh) * | 2015-01-05 | 2017-01-11 | 西安交通大学 | 一种以激光光刀为辅助光源的车位识别方法与装置 |
| CN107211516B (zh) | 2015-02-05 | 2019-11-29 | 飞利浦灯具控股公司 | 道路照明 |
| CN105157608B (zh) * | 2015-08-31 | 2018-12-07 | 浙江大华技术股份有限公司 | 一种超限车辆的检测方法、装置及系统 |
| EP3323237A4 (de) | 2015-08-26 | 2019-07-31 | Zhejiang Dahua Technology Co., Ltd | Verfahren und systeme zur verkehrsüberwachung |
| CN105335723B (zh) * | 2015-11-02 | 2019-04-19 | 招商局重庆交通科研设计院有限公司 | 一种基于红外结构光的车型识别方法 |
| CN105608907A (zh) * | 2016-03-11 | 2016-05-25 | 昆山市工研院智能制造技术有限公司 | 一种车辆检测系统 |
| US11313950B2 (en) * | 2019-01-15 | 2022-04-26 | Image Sensing Systems, Inc. | Machine learning based highway radar vehicle classification across multiple lanes and speeds |
| CN111427063B (zh) * | 2020-02-11 | 2023-03-17 | 深圳市镭神智能系统有限公司 | 一种移动装置通行控制方法、装置、设备、系统及介质 |
| EP4134933A1 (de) * | 2021-08-11 | 2023-02-15 | MOVYON S.p.A. | System und verfahren zur erkennung der klasse eines vorbeifahrenden fahrzeugs |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1048961A2 (de) * | 1999-04-30 | 2000-11-02 | Siemens Aktiengesellschaft | Anordnung und Verfahren zur gleichzeitigen Messung der geschwindigkeit sowie der Oberflächengestalt von bewegten Objekten |
| DE10005914A1 (de) * | 2000-02-10 | 2001-08-30 | Schmitz Gmbh | Kraftfahrzeugkontrollsystem |
| US20020140924A1 (en) * | 1999-01-08 | 2002-10-03 | Richard J. Wangler | Vehicle classification and axle counting sensor system and method |
| US20030062416A1 (en) * | 2001-09-26 | 2003-04-03 | Nec Research Institute, Inc. | Three dimensional vision device and method, and structured light bar-code patterns for use in the same |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6304321B1 (en) * | 1992-11-23 | 2001-10-16 | Schwartz Electro-Optics, Inc. | Vehicle classification and axle counting sensor system and method |
| US5546188A (en) * | 1992-11-23 | 1996-08-13 | Schwartz Electro-Optics, Inc. | Intelligent vehicle highway system sensor and method |
| US5793491A (en) * | 1992-12-30 | 1998-08-11 | Schwartz Electro-Optics, Inc. | Intelligent vehicle highway system multi-lane sensor and method |
| JP2989500B2 (ja) * | 1994-11-17 | 1999-12-13 | 三菱重工業株式会社 | 車種検知装置 |
| US7028899B2 (en) * | 1999-06-07 | 2006-04-18 | Metrologic Instruments, Inc. | Method of speckle-noise pattern reduction and apparatus therefore based on reducing the temporal-coherence of the planar laser illumination beam before it illuminates the target object by applying temporal phase modulation techniques during the transmission of the plib towards the target |
| US6195019B1 (en) * | 1998-01-20 | 2001-02-27 | Denso Corporation | Vehicle classifying apparatus and a toll system |
| WO2003029046A1 (en) * | 2001-10-03 | 2003-04-10 | Maryann Winter | Apparatus and method for sensing the occupancy status of parking spaces in a parking lot |
| US7970644B2 (en) * | 2003-02-21 | 2011-06-28 | Accenture Global Services Limited | Electronic toll management and vehicle identification |
| US20040167861A1 (en) * | 2003-02-21 | 2004-08-26 | Hedley Jay E. | Electronic toll management |
| WO2006044476A2 (en) * | 2004-10-12 | 2006-04-27 | Robert Vernon Vanman | Method of and system for mobile surveillance and event recording |
| US20070297651A1 (en) * | 2006-06-23 | 2007-12-27 | Schubert Peter J | Coutour-based object recognition method for a monocular vision system |
| CN1928892A (zh) * | 2006-09-20 | 2007-03-14 | 王枚 | 一种车牌定位识别、车标定位识别及车型识别的方法及装置 |
| CN101162507B (zh) * | 2006-10-13 | 2010-05-12 | 同方威视技术股份有限公司 | 一种对移动车辆进行车型识别的方法 |
| DE102007036294A1 (de) * | 2007-07-31 | 2009-02-05 | Gea Westfaliasurge Gmbh | Vorrichtung und ein Verfahren zum Bereitstellen von Informationen über Tiere beim Durchlaufen eines Tierdurchganges |
| CA2714362A1 (en) * | 2008-01-29 | 2009-08-06 | Enforcement Video, Llc | Omnidirectional camera for use in police car event recording |
| CN101231756A (zh) * | 2008-01-30 | 2008-07-30 | 安防科技(中国)有限公司 | 运动目标阴影检测方法及装置 |
-
2009
- 2009-10-01 SI SI200930262T patent/SI2306429T1/sl unknown
- 2009-10-01 PT PT09450190T patent/PT2306429E/pt unknown
- 2009-10-01 EP EP09450190A patent/EP2306429B1/de not_active Not-in-force
- 2009-10-01 PL PL09450190T patent/PL2306429T3/pl unknown
- 2009-10-01 AT AT09450190T patent/ATE550750T1/de active
- 2009-10-01 DK DK09450190.5T patent/DK2306429T3/da active
- 2009-10-01 ES ES09450190T patent/ES2384750T3/es active Active
-
2010
- 2010-08-24 AU AU2010214634A patent/AU2010214634B2/en not_active Ceased
- 2010-08-25 NZ NZ587584A patent/NZ587584A/en not_active IP Right Cessation
- 2010-09-10 ZA ZA2010/06521A patent/ZA201006521B/en unknown
- 2010-09-27 CL CL2010001008A patent/CL2010001008A1/es unknown
- 2010-09-28 CN CN2010102978523A patent/CN102034087A/zh active Pending
- 2010-09-30 CA CA2716158A patent/CA2716158A1/en not_active Abandoned
- 2010-10-01 US US12/896,813 patent/US20110103647A1/en not_active Abandoned
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020140924A1 (en) * | 1999-01-08 | 2002-10-03 | Richard J. Wangler | Vehicle classification and axle counting sensor system and method |
| EP1048961A2 (de) * | 1999-04-30 | 2000-11-02 | Siemens Aktiengesellschaft | Anordnung und Verfahren zur gleichzeitigen Messung der geschwindigkeit sowie der Oberflächengestalt von bewegten Objekten |
| DE10005914A1 (de) * | 2000-02-10 | 2001-08-30 | Schmitz Gmbh | Kraftfahrzeugkontrollsystem |
| US20030062416A1 (en) * | 2001-09-26 | 2003-04-03 | Nec Research Institute, Inc. | Three dimensional vision device and method, and structured light bar-code patterns for use in the same |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011053052B3 (de) * | 2011-08-26 | 2013-02-28 | Jenoptik Robot Gmbh | Verfahren und Vorrichtung zur Identifikation von Kraftfahrzeugen zur Verkehrsüberwachung |
| US9177211B2 (en) | 2011-08-26 | 2015-11-03 | Jenoptik Robot Gmbh | Method and apparatus for identifying motor vehicles for monitoring traffic |
| DE102013201821A1 (de) * | 2013-02-05 | 2014-08-07 | GESIG, Gesellschaft für Signalanlagen Gesellschaft m.b.H. | Verfahren und System zur Erfassung von Falschfahrern |
| DE102013201821B4 (de) * | 2013-02-05 | 2016-03-03 | GESIG, Gesellschaft für Signalanlagen Gesellschaft m.b.H. | Verfahren und System zur Erfassung von Falschfahrern |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2306429B1 (de) | 2012-03-21 |
| PT2306429E (pt) | 2012-05-17 |
| AU2010214634A1 (en) | 2011-04-21 |
| NZ587584A (en) | 2011-02-25 |
| AU2010214634B2 (en) | 2013-10-31 |
| ES2384750T3 (es) | 2012-07-11 |
| ZA201006521B (en) | 2011-06-29 |
| PL2306429T3 (pl) | 2012-08-31 |
| CN102034087A (zh) | 2011-04-27 |
| CL2010001008A1 (es) | 2011-08-19 |
| DK2306429T3 (da) | 2012-07-09 |
| SI2306429T1 (sl) | 2012-07-31 |
| US20110103647A1 (en) | 2011-05-05 |
| CA2716158A1 (en) | 2011-04-01 |
| ATE550750T1 (de) | 2012-04-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2306429B1 (de) | Vorrichtungen und Verfahren zur Klassifizierung von Fahrzeugen | |
| EP2306428B1 (de) | Vorrichtungen und Verfahren zur Bestimmung von Richtung, Geschwindigkeit und/oder Abstand von Fahrzeugen | |
| EP2686842B1 (de) | Vorrichtung zum überwachen eines fahrzeug-stellplatzes | |
| DE60223913T2 (de) | Vorrichtung und verfahren zur erkennung und speicherung von ereignissen | |
| EP2391995A1 (de) | Verfahren und anordnung zur beweiskräftigen erfassung einer übertretung einer zulässigen höchstgeschwindigkeit auf einem streckenabschnitt einer fahrbahn | |
| DE102009007342A1 (de) | Verfahren und Vorrichtung zum Ermitteln einer geltenden Fahrspurmarkierung | |
| EP1446678B1 (de) | Verfahren und vorrichtung zum erfassen und klassifizieren von fahrzeugen in bewegung | |
| EP2211321B1 (de) | Verfahren und Vorrichtung zum Steuern mindestens einer Lichtzeichenanlage eines Fußgängerüberwegs | |
| DE102009023326A1 (de) | Vorrichtung und Verfahren zum Detektieren eines kritischen Bereiches und Fußgängerdetektionsvorrichtung unter Verwendung derselben | |
| DE102015118598A1 (de) | Verfahren zur erfassung von geparkten fahrzeugen und zur abrechnung von parkgebühren | |
| DE102009013841A1 (de) | Messsystem für die Verkehrsstromanalyse | |
| EP2306425A1 (de) | Vorrichtung und Verfahren zur Detektion von Radachsen | |
| EP2306426A1 (de) | Vorrichtung zur Detektion von Fahrzeugen auf einer Verkehrsfläche | |
| DE102016106513A1 (de) | Verfahren zur Erfassung von geparkten Fahrzeugen | |
| EP0741377B1 (de) | System zur Überwachung des Strassenverkehrs | |
| CN101064063A (zh) | 视频电子警察系统减少误抓拍的方法 | |
| DE60202328T2 (de) | System zur Überwachung und Steuerung der Durchschnittsgeschwindigkeit von sich bewegenden Fahrzeugen und zur Untersuchung des Verkehrs auf Strassen und Autobahnen | |
| WO1998015934A1 (de) | Anordnung und verfahren zur überwachung von verkehrsflächen | |
| DE19604338A1 (de) | Einrichtung zur Zählung und Klassifizierung von Fahrzeugen | |
| EP0367725A2 (de) | Verfahren und Vorrichtung zur Erhöhung der Diebstahlsicherheit in gesicherten Parkanlagen | |
| DE4434131A1 (de) | Anordnung und Verfahren zum Detektieren und Lokalisieren von Fahrzeugen | |
| EP1417634B1 (de) | Vorrichtung und verfahren zur erkennung optischer markierungen | |
| EP2306427A1 (de) | Vorrichtungen und Verfahren zur Klassifizierung von Fahrzeugen | |
| DE102005032972B4 (de) | Verfahren zur Überwachung der Einhaltung einer auf einem Streckenabschnitt vorgegebenen Höchstgeschwindigkeit | |
| DE102019107396A1 (de) | Erfassen und Klassifizieren erhabener Fahrbahnmarkierungen unter Verwendung von LIDAR |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA RS |
|
| 17P | Request for examination filed |
Effective date: 20110319 |
|
| 17Q | First examination report despatched |
Effective date: 20110719 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MK MT NL NO PL PT RO SE SI SK SM TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 550750 Country of ref document: AT Kind code of ref document: T Effective date: 20120415 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: BUECHEL, VON REVY & PARTNER |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502009003084 Country of ref document: DE Effective date: 20120516 |
|
| REG | Reference to a national code |
Ref country code: PT Ref legal event code: SC4A Free format text: AVAILABILITY OF NATIONAL TRANSLATION Effective date: 20120504 |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: SK Ref legal event code: T3 Ref document number: E 11543 Country of ref document: SK |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2384750 Country of ref document: ES Kind code of ref document: T3 Effective date: 20120711 |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: T2 Effective date: 20120321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 |
|
| LTIE | Lt: invalidation of european patent or patent extension |
Effective date: 20120321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120622 Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 |
|
| REG | Reference to a national code |
Ref country code: PL Ref legal event code: T3 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120721 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: TOLL COLLECT GMBH Effective date: 20121220 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502009003084 Country of ref document: DE Effective date: 20121220 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: PATWIL AG, CH |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20121031 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20121001 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120621 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 |
|
| REG | Reference to a national code |
Ref country code: HU Ref legal event code: AG4A Ref document number: E017942 Country of ref document: HU |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SM Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20121001 |
|
| PLBP | Opposition withdrawn |
Free format text: ORIGINAL CODE: 0009264 |
|
| PLBD | Termination of opposition procedure: decision despatched |
Free format text: ORIGINAL CODE: EPIDOSNOPC1 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20120321 |
|
| PLBM | Termination of opposition procedure: date of legal effect published |
Free format text: ORIGINAL CODE: 0009276 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: OPPOSITION PROCEDURE CLOSED |
|
| 27C | Opposition proceedings terminated |
Effective date: 20150419 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 7 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SK Payment date: 20160930 Year of fee payment: 8 Ref country code: PL Payment date: 20160929 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20161019 Year of fee payment: 8 Ref country code: GB Payment date: 20161020 Year of fee payment: 8 Ref country code: DK Payment date: 20161019 Year of fee payment: 8 Ref country code: NO Payment date: 20161024 Year of fee payment: 8 Ref country code: CZ Payment date: 20160930 Year of fee payment: 8 Ref country code: CH Payment date: 20161020 Year of fee payment: 8 Ref country code: FR Payment date: 20161020 Year of fee payment: 8 Ref country code: HU Payment date: 20161019 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20161024 Year of fee payment: 8 Ref country code: PT Payment date: 20161003 Year of fee payment: 8 Ref country code: ES Payment date: 20161011 Year of fee payment: 8 Ref country code: SI Payment date: 20160923 Year of fee payment: 8 Ref country code: BE Payment date: 20161019 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20171019 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20171019 Year of fee payment: 9 Ref country code: AT Payment date: 20171020 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CZ Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171001 |
|
| REG | Reference to a national code |
Ref country code: DK Ref legal event code: EBP Effective date: 20171031 |
|
| REG | Reference to a national code |
Ref country code: NO Ref legal event code: MMEP |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20171101 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20171001 |
|
| REG | Reference to a national code |
Ref country code: SI Ref legal event code: KO00 Effective date: 20180508 |
|
| REG | Reference to a national code |
Ref country code: SK Ref legal event code: MM4A Ref document number: E 11543 Country of ref document: SK Effective date: 20171001 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20180629 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171001 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171031 Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171101 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171031 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171001 Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20180402 Ref country code: NO Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171031 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20171031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171002 Ref country code: HU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171002 Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171031 Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171031 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20181017 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171001 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171031 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171002 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20171001 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502009003084 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: EUG |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 550750 Country of ref document: AT Kind code of ref document: T Effective date: 20181001 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190501 Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181002 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20181001 |