EP2139773B1 - Sackabfüllverfahren an einer form-, fill- und seal-maschine - Google Patents
Sackabfüllverfahren an einer form-, fill- und seal-maschine Download PDFInfo
- Publication number
- EP2139773B1 EP2139773B1 EP08734811A EP08734811A EP2139773B1 EP 2139773 B1 EP2139773 B1 EP 2139773B1 EP 08734811 A EP08734811 A EP 08734811A EP 08734811 A EP08734811 A EP 08734811A EP 2139773 B1 EP2139773 B1 EP 2139773B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- bag
- filling
- relative movement
- weight
- phase
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
- 238000011049 filling Methods 0.000 title claims abstract description 115
- 238000000034 method Methods 0.000 title claims abstract description 37
- 238000007789 sealing Methods 0.000 title abstract description 3
- 238000005429 filling process Methods 0.000 claims abstract description 23
- 230000001105 regulatory effect Effects 0.000 claims abstract description 6
- 230000033001 locomotion Effects 0.000 claims description 41
- 238000005259 measurement Methods 0.000 claims description 27
- 230000004584 weight gain Effects 0.000 claims description 10
- 235000019786 weight gain Nutrition 0.000 claims description 10
- 238000012544 monitoring process Methods 0.000 claims description 8
- 238000001914 filtration Methods 0.000 claims description 3
- 238000004519 manufacturing process Methods 0.000 claims description 2
- 230000003287 optical effect Effects 0.000 claims 1
- 238000005303 weighing Methods 0.000 abstract description 10
- 230000001276 controlling effect Effects 0.000 abstract 1
- 239000000463 material Substances 0.000 description 26
- 230000032258 transport Effects 0.000 description 17
- 239000000428 dust Substances 0.000 description 9
- 230000008569 process Effects 0.000 description 9
- 238000004260 weight control Methods 0.000 description 9
- 241001295925 Gegenes Species 0.000 description 7
- 239000013590 bulk material Substances 0.000 description 7
- 230000001133 acceleration Effects 0.000 description 6
- 230000008859 change Effects 0.000 description 6
- 230000015572 biosynthetic process Effects 0.000 description 5
- 238000011109 contamination Methods 0.000 description 4
- 230000005855 radiation Effects 0.000 description 4
- 238000003466 welding Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 238000013461 design Methods 0.000 description 3
- 238000011156 evaluation Methods 0.000 description 3
- 230000005484 gravity Effects 0.000 description 3
- 238000004806 packaging method and process Methods 0.000 description 3
- 241000237858 Gastropoda Species 0.000 description 2
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N Titan oxide Chemical compound O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 2
- 230000033228 biological regulation Effects 0.000 description 2
- 230000006835 compression Effects 0.000 description 2
- 238000007906 compression Methods 0.000 description 2
- 230000007423 decrease Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 239000000945 filler Substances 0.000 description 2
- 239000004033 plastic Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000001960 triggered effect Effects 0.000 description 2
- 206010019909 Hernia Diseases 0.000 description 1
- 241000276397 Merluccius merluccius Species 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- 239000000969 carrier Substances 0.000 description 1
- 239000004568 cement Substances 0.000 description 1
- 238000005056 compaction Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 239000002360 explosive Substances 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 239000002655 kraft paper Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 239000003595 mist Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 239000005022 packaging material Substances 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 229920001169 thermoplastic Polymers 0.000 description 1
- 239000004416 thermosoftening plastic Substances 0.000 description 1
- 239000004408 titanium dioxide Substances 0.000 description 1
- 238000013022 venting Methods 0.000 description 1
Images




Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B1/00—Packaging fluent solid material, e.g. powders, granular or loose fibrous material, loose masses of small articles, in individual containers or receptacles, e.g. bags, sacks, boxes, cartons, cans, or jars
- B65B1/30—Devices or methods for controlling or determining the quantity or quality or the material fed or filled
- B65B1/32—Devices or methods for controlling or determining the quantity or quality or the material fed or filled by weighing
- B65B1/34—Adjusting weight by trickle feed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B1/00—Packaging fluent solid material, e.g. powders, granular or loose fibrous material, loose masses of small articles, in individual containers or receptacles, e.g. bags, sacks, boxes, cartons, cans, or jars
- B65B1/04—Methods of, or means for, filling the material into the containers or receptacles
- B65B1/10—Methods of, or means for, filling the material into the containers or receptacles by rotary feeders
- B65B1/12—Methods of, or means for, filling the material into the containers or receptacles by rotary feeders of screw type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B43/00—Forming, feeding, opening or setting-up containers or receptacles in association with packaging
- B65B43/42—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation
- B65B43/46—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation using grippers
- B65B43/465—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation using grippers for bags
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B43/00—Forming, feeding, opening or setting-up containers or receptacles in association with packaging
- B65B43/42—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation
- B65B43/54—Means for supporting containers or receptacles during the filling operation
- B65B43/56—Means for supporting containers or receptacles during the filling operation movable stepwise to position container or receptacle for the reception of successive increments of contents
- B65B43/58—Means for supporting containers or receptacles during the filling operation movable stepwise to position container or receptacle for the reception of successive increments of contents vertically movable
Definitions
- the invention relates to a method for producing, filling and sealing of plastic bags with dusty or granular bulk material and for closing the filled bags.
- Such a method is for example from the DE 93 01 355 U known.
- a device for producing, filling and closing unilaterally open preferably provided with gusseted bags of thermoplastic described in which a first welding and separation station to form the bag with bottom seam, a filling station and a second welding station for closing the bag available.
- these filling machines are classified in the FFS ( F orm F ill and S eal) category.
- the filling of dusty goods according to the known filling method described usually leads to a significantly inflated product volume or to a significant reduction in bulk density, since the product accumulates heavily in the free fall with air. This, in turn, leads to bottling the product initially much more packaging material is needed. In addition, the air must be able to escape from the bag again, otherwise it can not be stacked or stored.
- a film tube can be unwound from a settlement.
- the invention makes use of the fact that less dust is formed when the mouth of the Be colllorgans is below the Be colllgutsaustrittsö réelle of the metering. It is surprising that meaningful signals can be obtained with load cells, while there is mechanical contact of the filling material in the bag and the metering device.
- the filling member mainly generates higher-frequency interference signals, which can be eliminated by filtering the signals.
- Another measure that can increase filling speed and quality of measurement is a relative movement of dosing and bag during the filling process. When this relative movement is uniform, spurious signals are limited. This is especially true when the sack is moved uniformly.
- the measured values obtained during the submillar filling can advantageously be used as weight measured values for checking or regulating the bag weight during filling.
- This definition implies that, based on the weight measurements, the time at which the bag filling ends is determined. It also includes that a control of the filling speed and / or the speed of the relative movement between the bag and Be Pavllorgan is made.
- the filling speed that is, the weight increase per unit time or the first derivative of the weight after the time, can be used to detect errors that occur during the filling process.
- Such flaws can include a sack crack, which usually results in a rapid decrease in weight gain.
- the outlined procedure is believed to work best when the control unit emits a warning signal as the weight gain moves out of a desired range.
- the warning signal can be used by the control unit and / or the machine personnel to correct the error.
- monitoring the first derivative of weight gain over time provides insights into the quality of the filling process and early fault detection.
- a measurement with a radiation sensor can also be used to determine the Be Glallgutstandes.
- a radiation can be used which penetrates the bag material, but not the filling material.
- On the side facing away from the radiation emitter side of the bag radiation can only be collected by a suitable sensor when the transmitter and receiver are located above the Gregutspiegels.
- the speed with which the product level rises and the speed of the relative movement between the bag and the filling device should be matched to one another. At exactly the same speed, the distance between the mouth and Medgutapt remains constant, which may be desirable.
- This warning signal which of course can also lead manually (by the machine operator) or automatically (by a control device) to a control process, can reveal or expose a whole series of errors or failure mechanisms.
- This teaching also appears to be advantageous for non-dusty filling goods.
- the second period may overlap with the first period in which the weight gain is controlled. It may be shorter, longer, or the same as or the first, and may be before, during, or after the first one.
- volumetric weight determination means for example, that a measured or known number of screw revolutions is multiplied or otherwise mathematically linked to a known product delivery rate per revolution, so that the weight or volume of the material conveyed into the bag at one time is determined or included can be estimated with sufficient accuracy.
- the load cells can again assume the provision of measured values.
- load cells for the purposes of this document covers all suitable weight sensors such as scales and just the load cells themselves.
- load cells those weight sensors that contain electrical resistances arranged in the form of a Wheatstone bridge.
- the resistors change their ohmic resistance when deformed.
- the resistors are mounted on an element that deforms as the weight changes. Accordingly, the electrical output values of the Wheatstone bridge, which underlie the weight measurement change.
- empirical weight measurement is a measure or estimate that is only or largely due based on empirical values (eg, during a time T, a volume V of a particular filling material is filled).
- Explicit use can also be made in a fourth period of time, which can again be configured in position and duration as desired at the other time periods. This fourth period of time is advantageous at the end of the filling process.
- the filling can be carried out for the benefit of the overall process, while the outlet of the filling element is located above the filling material level.
- This phase of filling for example, can also be found at the end of the filling process and used to enable a sensitive and accurate dosing of the filling material.
- the filling is advantageously carried out with a method according to the invention, among other cement, titanium dioxide and all kinds of plastic dusts into consideration.
- the expert should understand under dusty goods bulk goods that just can not be filled on an FFS machine, unless a special filling process that often uses screws to guide the bulk material, is used.
- Devices for carrying out the method according to the invention are generally controlled and / or regulated by control devices which are loaded with stored command sequences which arrange and / or monitor the methods described above.
- These control programs are stored either on components of the control device or on other data carriers such as CDs or DVDs. It is also possible to send parts or the entirety of such programs.
- data set is used in the context of this application. This term also includes the sending of the relevant electronic information via networks, for example by e-mail.
- the closed at the lower end empty bag 11 is a horizontally displaceable transport, such as a gripper 18, passed and transported to the filling station.
- the filling station takes over a further transport 4, which consists of 3,4,5, the bag section.
- the empty bag is now opened with a suction system 16.
- the gripper 4 or be moved in the Z direction (sackeinafter).
- the connecting piece of the transport system 3 is moved into the bag and protects the sack inner surfaces from contamination by possible product adherence to the metering tube 2,21.
- the opened bag is pulled by the transport system 3,4,5 on the metering tube 2,21 until the lower end of the bag is approximately equal to the Gregutaustrittsö réelle 31.
- the bag bottom support device 32,33,34 is driven in the embodiment shown below the sack floor.
- a bag bottom support device 32, 33, 34 is not absolutely necessary. Rather, the relative movement of the bag relative to the Be Stirllorgan 2,21 mainly caused by the fact that the frame 5 along the guide 6 moves. This is represented by the double arrow 35. In this embodiment of the invention, therefore, the bag is moved relative to the Be refhapllorgan 2,21.
- the closure tube 21 is lifted and releases the product outlet opening 31.
- the product / bulk material 24 is filled in the bag. Meanwhile, the transport system 3,4,5 lowers the bag in such a way that the product outlet opening 31 is always below the filling level. However, even before the end of the metering of the product / bulk material 24, the product outlet opening 31 may be located at least once above the filling level 38.
- the closure tube 21 is lowered and closes the product outlet opening 31 by making contact with the closure 20.
- the connecting piece is pulled out of the bag.
- the gripper (s) 4 of the transport system 3, 4, 5 is or will now be moved counter to the Z direction (out of the bag) and tightens the opening area at the upper edge 25 of the previously opened bag.
- vibration generators / beaters 29 This effect of product compaction can be enhanced by the additional use of vibration generators / beaters 29. It is advantageous here to set the dosing tube 2, 21 in vibration by means of a vibration generator 29, since it is located within the product at least with parts of its lateral surface during filling. The vibrations are transmitted from the dosing 2.21 to the filling material 24, in which then takes place a compression. Another advantage of the "vibrating metering tube" 2.21 is that the formation of product adherence to the metering 2.21 is thereby largely avoided.
- the vibrator 29 could also be arranged on the "Sackêtunterstützungsvortechnisch" 34!
- a particularly advantageous embodiment of the carriage is the frame 5 together with the neck 3, transport 4 and the absorption 16 to sensors to store.
- the sensors send their signal to a weighing electronics, which ultimately controls the dosing process.
- the metering or pipe 2 In the metering or pipe 2 is a screw 7, can be promoted with the filling material 24 from the hopper 1 without much dust in the bag 8.
- the various sensors 26 (in particular weighing sensors or load cells) indicate advantageous locations for attaching such sensors.
- the conveyor belt 27 transports the filled bags (8). In the vicinity thereof, the checkweigher 30 and the vibration generator 29 are mounted.
- FIGS. 3 to 5 show the time course of the bag weight in three embodiments of the invention. With respect to these figures, the terms previously used with respect to monitoring the filling rate g / t are used.
- FIGS. 7 to 9 show the same embodiments and use the terms already used above with respect to the UnterLitebe colllung with simultaneous generation of measurement signals. This distinction increases the clarity and facilitates the distinction between inventive and non-inventive filling method.
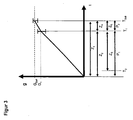
- FIG. 3 the time course of the weight increase of a bag in the execution of a bag filling process is shown.
- the bag weight g is plotted on the vertical axis and the time t on the horizontal axis.
- Interference signals are caused here mainly by the Be Schollorgan 2,21 whose Basal Bachsö réelle 31 is yes in the period Z 3 , which coincides here with the phase 1 and time Z 2 , below the Be Schollgutapts 38 is located.
- the filling element will be at the beginning of the filling above the filling material level 38, since there is still no or too little filling material in the bag 8. This circumstance is taken into account here by the fact that the time period Z 3 does not begin at time 0 but at time T 2 .
- the phase P 2 of the bag filling begins.
- this point in time will be regarded as having been attained if, on the basis of the volumetric measurement or estimation of the bag weight, it can be assumed that a certain proportion G 1 of the bag target weight G target has been reached. This percentage can be 95%.
- some parameters of the bag filling change The bag weight is actually monitored by the evaluation of the load cell signals and the filling takes place while the Be Glallorgan 2,21 is located entirely above the Gregutapt 38. This improves the quality of the weight measurements.
- the monitoring of the weight increase is carried out during the entire filling process in this embodiment.
- the filling process ends when the target weight G target is reached.
- the termination is performed automatically by the control device, not shown, when the load cells 26 report the desired signals to the control device.
- the filling rate is lower in Phase 2 than in Phase 1.
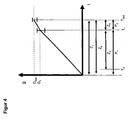
- FIG. 4 Another variant of this procedure is in FIG. 4 illustrated. It is sufficient at this point, the differences to the in FIG. 3 To be mentioned embodiment:
- the period Z 4 in which the signals of the load cells are also used to control / regulate the bag weight, lasts during the entire filling process. There is no volumetric weight control. It is advantageous if the interference signals, which arise in particular during the submillar filling (Z 3 ), are eliminated by filters on the measuring signals.
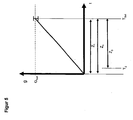
- FIG. 5 is dispensed with different phases of the filling process.
- the weight of the bag is used for weight control (period Z 4 ).
- the Submirror method filled (period Z 3 ).
- a reduction of the bag speed does not occur.
- FIG. 6 shows how the in FIG. 5 illustrated embodiment, the first derivative of the weight after the time g / t during the filling operation behaves. It is constant.
- the curly bracket S indicates the desired range. This does not necessarily have to be symmetrical about the setpoint G / T nominal .
- the target range S has a lower S U and an upper S O limit.
- the arrows 36, 37 indicate that the value g / t can leave the target range if an error occurs.
- a course of the weight change according to the arrow 36 can occur as a result of a blind crack.
- an alarm is triggered, which can trigger measures of the machine personnel and / or the control device.
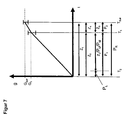
- FIG. 7 shows again the same embodiment as FIG. 3 but additionally uses the terms introduced in relation to the measurement of the bag weight during the filling of the lower mirror.
- the phase P U in which the submirror process is filled is equivalent to the third time period Z 3 .
- This period is preceded here by the phase P L , in which the mouth 31 of the Be Glallorgans 2 is not below the level of contents 38, since the mouth 31 is a minimum distance AM above the bottom of the bag 39 and there is not enough good in the bag 8 to to cover the mouth 31.
- the relative velocity v R between the sack 8 and the metering device 2 is set so that it is slower than the speed v F , with which the filling material rises in the bag.
- v R can also be zero here.
- the filling material level 38 "overtakes" the mouth 31 until a desired distance A setpoint between the level of contents 38 and the mouth 31 is reached. From this point in time T 2 , the speeds v R and v F are adjusted, so that the distance A target is maintained.
- the phase P M in which the measured values are utilized in any desired form while being filled in the submirror process, thus lasts between the times T 2 and T 1 during the entire submirror filling.
- the overlap between the periods P R and P L indicates that there is still a relative velocity greater than zero in the phase P L (slowed relative movement v R between the sack 8 and the metering element 2).
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Quality & Reliability (AREA)
- Basic Packing Technique (AREA)
- Package Closures (AREA)
- Auxiliary Devices For And Details Of Packaging Control (AREA)
- Containers And Plastic Fillers For Packaging (AREA)
Description
- Die Erfindung betrifft ein Verfahren zum Herstellen, Befüllen und Verschließen von Kunststoffsäcken mit staubigem oder auch körnigem Schüttgut sowie zum Verschließen der befüllten Säcke.
- Eine derartiges Verfahren ist beispielsweise aus der
DE 93 01 355 U bekannt. Hier ist bereits eine Vorrichtung zur Herstellung, Befüllung und zum Verschließen einseitig offener, vorzugsweise mit Seitenfalten versehener Säcke aus thermoplastischem Kunststoff beschrieben, bei der eine erste Schweiß- und Trennstation zur Bildung des Sackes mit Bodennaht, eine Füllstation und eine zweite Schweißstation zum Verschließen des Sackes vorhanden sind. Im Allgemeinen werden diese Abfüllmaschinen in die FFS(Form Fill and Seal)-Kategorie eingeordnet. - Bei der Abfüllung staubiger Schüttgüter auf Maschinen der genannten Kategorie über Schwerkraft bzw. durch den freien Fall muss die vom Produkt verdrängte, staubige Luft aus dem Sack entweichen können. Bei dem Entweichen der Luft kommt es oft zu Kontaminationen in den oberen Randbereichen des Sackes. Bedingt durch die Kontamination mit Produktstaub kann der Sack mittels der bei dieser Art Verpackung im Allgemeinen üblichen Verschweißung nicht sicher verschlossen werden. Darüber hinaus belastet der Staub die Umwelt und muss gesondert abgesaugt werden.
- Ferner führt die Abfüllung staubiger Güter nach dem beschriebenen bekannten Abfüllverfahren in der Regel zu einem deutlich überhöhten Produktvolumen bzw. zu einer deutlichen Reduzierung des Schüttgewichtes, da sich das Produkt durch den freien Fall stark mit Luft anreichert. Dieses wiederum führt dazu, dass zur Abfüllung des Produkts zunächst deutlich mehr Verpackungsmaterial gebraucht wird. Darüber hinaus muss die Luft auch wieder aus dem Sack entweichen können, da er sich sonst nicht stapeln bzw. lagern lässt.
- Da das Entweichen der Luft in der Regel sehr lange dauert, kann die Entlüftung nicht bereits vor dem Verschließen des Sackes stattfinden. Der Sack muss daher eine Perforation aufweisen. Dieses belastet zusätzlich die Umwelt, da durch die Perforation der Verpackung die feinkörnigen, staubigen Produkte zum Teil nach außen gelangen können.
- Mit der Zeit nimmt das Volumen des Schüttgutes wieder ab. Die Sackverpackung ist nun, gemessen am verpackten Schüttgutvolumen, deutlich zu groß. Solcherart befüllte Säcke lassen sich nur schlecht auf Paletten stapeln, da sie zu instabil sind. Die
EP 1 459 981 A1 schlägt daher vor, den Einfüllstutzen eines Dosierorgans einer FFS-Maschine in die Öffnung eines Sackes einzuführen. Bei derWO 2006/053627 A1 wird die Relativbewegung zwischen Sack und Einfüllstutzen dagegen durch eine Bewegung des Sackes bewerkstelligt. - In beiden vorgenannten Druckschriften werden Dosierorgane vorgestellt, die Schnecken enthalten. Diese Schnecken fördern das Befüllgut in die Säcke. Die bevorzugte Förderrichtung in diesen Schnecken entspricht der Wirkrichtung der Schwerkraft. Durch die Schnecken unterbleibt ein freier Fall des Befüllguts in den Sack. Daher werden Schnecken oft zur Absackung von staubigen Befüllgütern verwendet. Ihre Verwendung ist jedoch - auch in Bezug auf die vorliegende Erfindung - keineswegs zwingend.
- Neben der vorgenannten mechanischen Ausgestaltung der Sackbefüllungsorgane steht bei der Konzeption von FFS-Maschinen, die insbesondere staubige Güter abfüllen, der Wiegeprozess im Zentrum des Interesses. Bei FFS-Maschinen des Standes der Technik (siehe zum Beispiel
DE 199 20 478 C2 undEP 1 201 539 B1 ), die in erster Linie weniger staubige Güter verfüllen, wird zunächst ein Fülltrichter mit dem Sollvolumen an Befüllmaterial für einen Sack befüllt. Das Sollvolumen beziehungsweise das Sollgewicht wird durch ein Wiegen des Fülltrichters ermittelt beziehungsweise geregelt. Wenn das Sollgewicht erreicht ist, wird die Abfüllöffnung am Boden des Fülltrichters geöffnet und das Füllmaterial strömt mit der Schwerkraft in den dafür vorgesehenen Sack. Insbesondere bei der Abfüllung staubiger Güter führt dieses unstetige Verfahren jedoch zu zu großer Staubentwicklung. Auch in der bereits genanntenWO 2006/053627 A1 werden Wiegeverfahren für staubige Güter diskutiert. Generell ist zu sagen, dass solche Wiegeverfahren, wenn sie während der Befüllung durchgeführt werden, auch über längere Zeitspannen hinweg durchgeführt werden, da die Verfüllung staubigen Verfüllgutes ohne übergroße Staubentwicklung oft länger dauert als die Verfüllung einer gleichen Menge üblichen Verfüllgutes. Während dieser - oft längeren - Füllvorgänge können Fehler vorkommen. Zu diesen Fehlern kann ein Sackriss, ein Rutschen des Sackes aus den Haltezangen, ein Schneckenbruch oder ein Verstopfen der Schnecke (falls eine Schnecke verwendet wird) zählen. Es ist einzusehen, dass solche Fehler insbesondere bei staubigen Verfüllgütern zu einer großen Verschmutzung der Maschine und der Maschinenhalle und sogar zu Schäden am Maschinenpark führen können. - Ein anderer Nachteil, der sich insbesondere bei der Befüllung staubiger Befüllgüter zeigt, liegt in der Begrenzung der Befüllgeschwindigkeit. Die staubigen Güter entwickeln eben zu viel Staub, wenn sie schnell abgefüllt werden. Da ein Vorverwiegen des für einen Sack gedachten Befüllgutes nicht in Frage kommt, stellt sich auch die Frage, wie überhaupt das Sackgewicht während des Befüllens geregelt werden soll.
- Daher lässt sich die Aufgabenstellung der vorliegenden Erfindung folgendermaßen zusammenfassen: Es soll ein möglichst schneller Abfüllprozess bei geringer Staubentwicklung vorgeschlagen werden, bei dem das Gewicht des Sackes möglichst genau geregelt werden kann. Die Aufgabe wird durch Anspruch 1 gelöst.
- In aller Regel wird der Befüllung des Sackes die Sackbildung - oft aus einem Schlauchstück - unmittelbar vorausgehen. Zur Bildung der Schlauchstücke kann ein Folienschlauch von einer Abwicklung abgewickelt werden.
- Die Erfindung macht sich zunutze, dass weniger Staub entsteht, wenn die Mündung des Befüllorgans sich unterhalb der Befüllgutsaustrittsöffnung des Dosierorgans befindet. Es ist überraschend, dass sich mit Wägezellen sinnvolle Signale gewinnen lassen, während ein mechanischer Kontakt des Befüllgutes im Sack und dem Dosierorgan besteht.
- Es ist von Vorteil, diese Signale zu filtern. Hierbei hat sich gezeigt, dass das Befüllorgan vor allem höherfrequente Störsignale erzeugt, die durch eine Filterung der Signale beseitigt werden können.
- Eine weitere Maßnahme, die Abfüllgeschwindigkeit und Messgüte steigern kann, ist eine Relativbewegung von Dosierorgan und Sack während des Befüllvorganges. Wenn diese Relativbewegung gleichförmig ist, werden Störsignale begrenzt. Dies gilt insbesondere, wenn der Sack gleichförmig bewegt wird.
- Die während der Unterspiegelbefüllung gewonnenen Messwerte können vorteilhafterweise als Gewichtsmesswerte zur Kontrolle beziehungsweise Regelung des Sackgewichts während der Befüllung eingesetzt werden. Diese Definition schließt ein, dass aufgrund der Gewichtsmesswerte der Zeitpunkt, zu dem die Sackbefüllung endet, bestimmt wird. Sie schließt außerdem ein, dass eine Steuerung der Abfüllgeschwindigkeit und/oder der Geschwindigkeit der Relativbewegung zwischen Sack und Befüllorgan vorgenommen wird.
- Die Abfüllgeschwindigkeit, das heißt die Gewichtszunahme pro Zeiteinheit oder auch die erste Ableitung des Gewichts nach der Zeit, kann dazu benutzt werden, Fehler, die bei dem Abfüllvorgang auftreten, zu erkennen. Zu solchen Fehlern kann ein Sackriss, der in der Regel zu einem schnellen Sinken der Gewichtszunahme führt, zählen. Das skizzierte Verfahren dürfte am Besten funktionieren, wenn die Steuereinheit ein Warnsignal auswirft, wenn sich die Gewichtszunahme aus einem Sollbereich heraus bewegt. Das Warnsignal kann von der Steuereinheit und/oder vom Maschinenpersonal zur Korrektur des Fehlers genutzt werden.
- Auch die Überwachung der ersten Ableitung der Gewichtszunahme nach der Zeit ermöglicht Einblicke in die Güte des Abfüllverfahrens und eine frühe Fehlererkennung.
- Bei allen erfindungsgemäßen Verfahren und auch anderen Verfahren, die auf Maschinen durchgeführt werden, die die Relativposition zwischen Sack und Befüllorgan ändern (die Druckschriften
EP 1 459 981 A1 undWO 2006/053627 A1 schlagen unterschiedliche Spielarten solcher Maschinen vor), sind Verfahren vorteilhaft einsetzbar, bei denen die Steuereinrichtung die Relativbewegung zwischen Sack und Dosierorgan und die Befüllung folgendermaßen steuert: - der Abstand zwischen der Mündung des Befüllorgans und dem Sackboden wird auf einen Mindestabstand eingestellt,
- die Sackbefüllung beginnt, wobei Befüllgut durch die Mündung des Befüllorgans in den Sack strömt,
- der Befüllgutspiegel steigt, wobei entweder keine Steigerung des Abstandes zwischen der Mündung und dem Sackboden durch eine Relativbewegung vorgenommen wird oder diese Relativbewegung langsamer ist als die Geschwindigkeit, mit der der Füllgutpegel steigt,
- ein Beginn oder eine Steigerung der Geschwindigkeit der Relativbewegung zu einem Zeitpunkt, nachdem der Füllgutpegel über der Mündung liegt.
- Durch diese Maßnahmen kann vor allem die Staubbildung reduziert werden.
- Wenn, ergänzend zu den vorstehenden Maßnahmen, der Beginn oder die Steigerung der Geschwindigkeit der Relativbewegung vorgenommen wird, nachdem der Füllgutstand über der Mündung liegt, wenn ein Sollabstand zwischen der Mündung und dem Füllgutstand erreicht ist, ist gewährleistet, dass die Mündung des Befüllorgans nicht zu weit unter dem Befüllgutstand zurückbleibt. Außerdem führt die beschleunigte Relativbewegung dazu, dass die Möglichkeit besteht, das.Gewicht des Sackes und nicht den Fülldruck des Befüllgutes, das aus der Mündung dringt, zu messen.
- Das Erreichen des Sollabstandes kann wieder durch eine Gewichtsmessung, d. h. durch die Auswertung von Wägezellensignalen verifiziert werden, da man sicherlich aufgrund der Kenntnis der Dichte des Befüllstoffes und dem Sackvolumen oder einfach aufgrund empirischer Werte in der Lage ist, einem Sackgewicht einen Befüllgutstand zu zuordnen. Ähnliches gilt bei der Messung der Abfüllgeschwindigkeit.
- Eine Messung mit einem Strahlungssensor kann jedoch auch zur Feststellung des Befüllgutstandes herangezogen werden. So kann eine Strahlung verwendet werden, die das Sackmaterial, nicht aber das Befüllgut durchdringt. Auf der dem Strahlungsemittent abgewandten Seite des Sackes kann nur dann Strahlung von einem geeigneten Sensor aufgefangen werden, wenn sich Sender und Empfänger oberhalb des Füllgutspiegels befinden.
- Wenn der Sollabstand zwischen Mündung des Befüllorgans und Füllgutspiegel erreicht ist, sollten die Geschwindigkeit, mit der der Füllgutspiegel steigt, und die Geschwindigkeit der Relativbewegung zwischen Sack und Befüllorgan aneinander angeglichen werden. Bei einer exakt gleichen Geschwindigkeit bleibt der Abstand zwischen Mündung und Befüllgutspiegel konstant, was erwünscht sein kann.
- Zu der zusätzlichen Beobachtung der Gewichtszunahme des Sackes pro Zeiteinheit ist folgendes zu sagen: Liegt diese Gewichtszunahme außerhalb eines Ziel- oder Toleranzbereiches, so wird ein Warnsignal ausgegeben.
- Dieses Warnsignal, das natürlich auch manuell (durch den Maschinenbediener) oder automatisch (durch eine Steuereinrichtung) zu einem Regelvorgang führen kann, kann eine ganze Reihe von Fehlern oder Fehlermechanismen aufzeigen oder entlarven. Diese Lehre erscheint auch bei nicht staubigen Befüllgütern vorteilhaft anwendbar.
- Die folgende Tabelle enthält Beispiele dafür, welche Messwerte oder welcher Messwertverlauf auf welche Fehler schließen lassen:
Fehler Erkennungsroutine Gefährdungspotenzial Sackbruch (Steigung zu gering oder negative Steigung) Zustauben des Innenraums der Maschine Ein Abrutschen des Sackes aus den Haltezangen (negative Steigung) Zustauben des Innenraums der Maschine Störung in der Produktzuleitung (Steigung zu gering) Bildung eines explosionsfähigen Gemisches - Bei der optionalen Verwendung einer Schnecke zur Abfüllung des Befüllgutes treten unter anderem folgende Fehlercharakterisika hinzu:
Schneckenbruch (Steigung zu gering) z.B. Funkenbildung Falsches Produkt (Produktspezifische Steigung nicht okay) diverse Gefahren Ausfall des Antriebs (Steigung zu gering) diverse Gefahren Verstopfen der Schnecke (Steigung zu gering) diverse Gefahren Falsch eingestelltes Auslaufband (Bodenkontakt) (Steigung zu gering) Zustauben des Innenraums der Maschine - Da die Kontrolle oder Regelung des Sackgewichtes während der zweiten Zeitspanne eben nicht durch eine Auswertung der Signale der Wägezellen erfolgt, ist es vorteilhaft, dieses volumetrisch oder empirisch zu ermitteln. Hierbei ist unter volumetrischer Gewichtsbestimmung beispielsweise zu verstehen, dass eine gemessene oder bekannte Zahl von Schneckenumdrehungen mit einer bekannten Füllgutförderrate pro Umdrehung multipliziert oder sonst wie mathematisch verknüpft wird, so dass das Gewicht oder das Volumen des zu einem Zeitpunkt in den Sack geförderten Materials ermittelt oder mit hinreichender Genauigkeit abgeschätzt werden kann. Am Ende einer solchen zweiten Zeitspanne mit volumetrischer Messung können die Wägezellen wieder die Bereitstellung von Messwerten übernehmen. Übrigens deckt der Begriff Wägezellen für die Zwecke dieser Druckschrift alle geeigneten Gewichtssensoren wie Waagen und eben die Wägezellen selber ab. Im Allgemeinen versteht der Fachmann unter Wägezellen solche Gewichtssensoren, die elektrische Widerstände, die in Form einer Wheatstonebrücke angeordnet sind, enthalten. Die Widerstände ändern ihren ohmschen Widerstand, wenn sie verformt werden. Die Widerstände sind auf einem Element angebracht, das sich bei einer Gewichtsänderung verformt. Dementsprechend ändern sich die elektrischen Ausgangswerte der Wheatstonebrücke, die der Gewichtsmessung zugrunde liegen.
- Im Vergleich zu der volumetrischen Gewichtsmessung ist eine empirische Gewichtsmessung eine Messung oder Abschätzung, die nur oder größtenteils auf empirischen Werten beruht (z. B. während einer Zeit T wird ein Volumen V eines bestimmten Befüllmaterials abgefüllt).
- Es ist vorteilhaft, wenn die Mündung des Befüllorgans während einer dritten Zeitspanne unterhalb des Befüllgutspiegels liegt. In der Regel wird dies ganz zu Beginn des Befüllprozesses (leerer Sack) nicht der Fall sein können. Tests haben jedoch gezeigt, dass diese Maßnahme (die Unterspiegelbefüllung) die Nebelbildung beim Befüllen des Sackes zurückführt. Eine Überschneidung zwischen zweiter (keine Gewichtsregelung nach Wägezellensignalen) und dritter Zeitspanne (Unterspiegelbefüllung) ist vorteilhaft. Die Relativbewegung von Befüllorgan und Befüllgut ist geeignet, bei der Unterspiegelbefüllung die Gewichtsmessung zu stören. Diese Störungen unterbleiben jedoch in einer zweiten Zeitspanne nach der obigen Definition, da während einer solchen Zeitspanne die Gewichtsmessung eben nicht zur Gewichtskontrolle oder -regelung herangezogen wird. Eine Alternative zu dieser Maßnahme ist die Ausblendung der Störsignale durch einen geeigneten Filter. Es hat sich gezeigt, dass die Störsignale, die von dem Befüllorgan erzeugt werden, relativ hochfrequent sind, so dass diese Maßnahme vorteilhaft ist.
- Eine explizite Nutzung auch kann in einer vierten Zeitspanne, die wieder in Lage und Dauer beliebig zu den anderen Zeitspannen gestaltet sein kann, vorgenommen werden. Vorteilhaft ist diese vierte Zeitspanne am Ende des Befüllprozesses.
- In einer fünften Zeitspanne, die wieder in Lage und Dauer beliebig zu den anderen Zeitspannen gestaltet sein kann, kann zum Vorteil des Gesamtprozesses die Befüllung vorgenommen werden, während sich der Ausgang des Befüllorgans oberhalb des Befüllgutspiegels befindet. Diese Phase der Befüllung kann zum Beispiel ebenfalls am Ende des Befüllprozesses stehen und dazu genutzt werden, eine feinfühlige und genaue Dosierung des Befüllgutes zu ermöglichen.
- Als staubige Güter, deren Abfüllung vorteilhafterweise mit einem erfindungsgemäßen Verfahren vorgenommen wird, kommen unter anderem Zement, Titandioxid und alle möglichen Kunststoffstäube in Betracht. Allgemein dürfte der Fachmann unter staubigen Gütern Schüttgüter verstehen, die sich an einer FFS-Maschine eben nicht abfüllen lassen, wenn nicht ein spezielles Abfüllverfahren, das sich oft Schnecken zur Führung des Schüttgutes bedient, verwendet wird.
- Vorrichtungen zur Durchführung des erfindungsgemässen Verfahrens werden in der Regel von Steuervorrichtungen gesteuert und/oder geregelt, die mit gespeicherten Befehlsfolgen, die die vorstehend beschriebenen Verfahren anordnen und/oder überwachen, beaufschlagt sind. Diese Steuerprogramme sind entweder auf Bestandteilen der Steuervorrichtung oder auf anderen Datenträgern wie CDs oder DVDs gespeichert. Auch eine Versendung von Teilen oder der Gesamtheit solcher Programme erscheint möglich. Für alle vorstehend genannten und bekannten Möglichkeiten oder Medien, Daten und Befehlsfolgen zu speichern und/oder zu transportieren, wird im Rahmen dieser Anmeldung der Begriff "Datenset" gebraucht. Dieser Begriff umschließt auch die Versendung der betreffenden elektronisierten Informationen über Netzwerke, zum Beispiel per E-Mail.
- Weitere Ausführungsbeispiele der Erfindung gehen aus der gegenständlichen Beschreibung und den Ansprüchen hervor.
- Die einzelnen Figuren zeigen:
- Fig. 1
- Seitenansicht einer FFS-Maschine
- Fig. 2
- Detailansicht von
Figur 1 - Fig. 3
- den Verlauf des Sackgewichtes, gegen die Zeit aufgetragen (1. Ausführungsbeispiel)
- Fig. 4
- den Verlauf des Sackgewichtes, gegen die Zeit aufgetragen (2. Ausführungsbeispiel)
- Fig. 5
- den Verlauf des Sackgewichtes, gegen die Zeit aufgetragen (3. Ausführungsbeispiel)
- Fig. 6
- der Verlauf der Sackgewichtszunahme, gegen die Zeit aufgetragen (3. Ausführungsbeispiel)
- Fig. 7
- den Verlauf des Sackgewichtes, gegen die Zeit aufgetragen (1. Ausführungsbeispiel, Nomenklatur in Bezug auf die Unterspiegelbefüllung)
- Fig. 8
- den Verlauf des Sackgewichtes, gegen die Zeit aufgetragen (2. Ausführungsbeispiel, Nomenklatur in Bezug auf die Unterspiegelbefüllung)
- Fig. 9
- den Verlauf des Sackgewichtes, gegen die Zeit aufgetragen (3. Ausführungsbeispiel, Nomenklatur in Bezug auf die Unterspiegelbefüllung)
- Eine Schlauchfolienbahn 15, vorzugsweise mit eingelegten Seitenfalten, wird zunächst von einem Vorzugrollensystem 9 in ein horizontal bewegliches Transportmittel, beispielsweise ein Greiferpaar 18 gefördert.
- Die Folienbahn 15 wird, nachdem der Vorzug den Abschnitt entsprechend der gewünschten Sacklänge vorgezogen hat, vom Messer 17 durchgeschnitten. Gleichzeitig erfolgt die Bodenschweißung 13. Der am unteren Ende verschlossene Leersack 11 wird einem horizontal verschieblichen Transportmittel, beispielsweise einem Greifer 18, übergeben und zur Füllstation transportiert.
- In der Füllstation übernimmt ein weiteres Transportmittel 4, welches aus 3,4,5 besteht, den Sackabschnitt. Der Leersack wird nun mit einem Saugersystem 16 geöffnet. Dazu wird der bzw. werden die Greifer 4 in Z-Richtung (sackeinwärts) bewegt. Der Anschlussstutzen des Transportsystems 3 wird in den Sack bewegt und schützt die Sackinnenflächen vor der Verschmutzung durch eventuelle Produktanhaftungen am Dosierrohr 2,21.
- Der geöffnete Sack wird vom Transportsystem 3,4,5 über das Dosierrohr 2,21 gezogen, bis sich das untere Ende des Sackes ungefähr in Höhe der Füllgutaustrittsöffnung 31 befindet. Die Sackbodenunterstützungseinrichtung 32,33,34 wird bei dem gezeigten Ausführungsbeispiel unter den Sackboden gefahren. Eine Sackbodenunterstützungseinrichtung 32,33,34 ist jedoch nicht unbedingt erforderlich. Vielmehr wird die Relativbewegung des Sackes gegenüber dem Befüllorgan 2,21 hauptsächlich dadurch hervorgerufen, dass der Rahmen 5 entlang der Führung 6 fährt. Dies wird durch den Doppelpfeil 35 dargestellt. Bei diesem Ausführungsbeispiel der Erfindung wird also der Sack gegenüber dem Befüllorgan 2,21 bewegt. Denkbar ist es natürlich auch, die Relativbewegung zwischen Sack 8 und Dosierorgan 2 durch eine Bewegung des Dosierorgans 2 oder gar durch eine Bewegung von Sack 8 und Dosierorgan 2 herbeizuführen. In der Regel ist es hierbei ausreichend, wenn der Sack hierbei durch greiferartige Transportmittel 4 an seinem oberen Ende gehalten wird. Die erwähnte Sackbodenunterstützungseinrichtung 32,33,34 bietet optionalen, zusätzlichen Schutz vor einem Riss des gerade geschweißten Sackbodens.
- Das Verschlussrohr 21 wird angehoben und gibt die Produktaustrittsöffnung 31 frei. Das Produkt/Schüttgut 24 wird in den Sack gefüllt. Währenddessen senkt das Transportsystem 3,4,5 den Sack in der Weise ab, dass sich die Produktaustrittsöffnung 31 jederzeit unterhalb des Füllspiegels befindet. Noch vor dem Ende der Dosierung des Produktes/Schüttguts 24 kann sich die Produktaustrittsöffnung 31 jedoch zumindest einmal oberhalb des Füllspiegels 38 befinden. Nach Ende der Befüllung wird das Verschlussrohr 21 abgesenkt und verschließt die Produktaustrittsöffnung 31, indem sie Kontakt mit dem Verschluss 20 aufnimmt. Der Anschlussstutzen wird aus dem Sack gezogen. Der bzw. die Greifer 4 des Transportsystems 3,4,5 wird bzw. werden nun entgegen der Z-Richtung (sackauswärts) bewegt und zieht den Öffnungsbereich am oberen Rand 25 des zuvor geöffneten Sacks stramm. Ein weiteres Transportmittel übernimmt den befüllten Sack 8. Mittels der Verschließeinrichtung 14 wird nun der obere Rand des Sacks 25 verschlossen. Zusammen mit dem Dosiervorgang kann bei Bedarf durch den im Verschlussrohr 21 integrierten Filter abgesaugt werden. Das erforderliche Vakuum wird über den Stutzen 23 eingeleitet. Die Integration des Filters in das Verschlussrohr erlaubt eine sehr kompakte Bauform, die es ermöglicht, auch relativ kleine Säcke abzufüllen. Das Absaugen der Luft führt gewissermaßen zu einer Verdichtung des Schüttguts. Hierdurch kann eine der Produktmenge angemessene Sackgröße gewählt werden.
- Dieser Effekt der Produktverdichtung kann durch den zusätzlichen Einsatz von Vibrationserzeugern/ Klopfern 29 noch verstärkt werden. Hier ist es vorteilhaft, das Dosierrohr 2,21 mittels eines Vibrationserzeugers 29 in Schwingung zu versetzen, da es sich während der Befüllung zumindest mit Teilen seiner Mantelfläche innerhalb des Produktes befindet. Die Schwingungen werden vom Dosierrohr 2,21 an das Befüllgut 24 übertragen, in dem dann eine Verdichtung stattfindet. Ein weiterer Vorteil des "vibrierenden Dosierrohrs" 2,21 ist, dass die Bildung von Produktanhaftungen am Dosierrohr 2,21 dadurch weitgehend vermieden wird. Der Rüttler 29 könnte auch an der "Sackbodenunterstützungsvorrichtung" 34 angeordnet sein!
- Eine besonders vorteilhafte Ausführung des Verfahrschlittens ist es, den Rahmen 5 mitsamt Stutzen 3, Transportmittel 4 sowie der Aufsaugung 16 auf Sensoren zu lagern. Die Sensoren senden ihr Signal an eine Wägeelektronik, welche letztendlich den Dosiervorgang steuert.
- Zu erwähnen ist noch die Führung bzw. Stütze 6, die den Rahmen 5 und damit die Transportmittel 4 trägt. In dem Dosierorgan beziehungsweise Rohr 2 befindet sich eine Schnecke 7, mit der Befüllmaterial 24 aus dem Trichter 1 ohne große Staubbildung in den Sack 8 gefördert werden kann. Die verschiedenen Sensoren 26 (v. a. Wägesensoren beziehungsweise Wägezellen) deuten vorteilhafte Orte zum Anbringen solcher Sensoren an. Das Transportband 27 transportiert die befüllten Säcke (8). In der Umgebung desselben sind die Kontrollwaage 30 und der Vibrationserzeuger 29 angebracht.
- Die
Figuren 3 bis 5 zeigen den zeitlichen Verlauf des Sackgewichts bei drei Ausführungsbeispielen der Erfindung. In Bezug auf diese Figuren werden die Begriffe gebraucht, die vorstehend bereits in Bezug auf die Überwachung der Abfüllgeschwindigkeit g/t gebraucht wurden. DieFiguren 7 bis 9 zeigen dieselben Ausführungsbeispiele und benutzen die Begriffe, die vorstehend bereits in Bezug auf die Unterspiegelbefüllung bei gleichzeitiger Generierung von Messsignalen gebraucht werden. Diese Unterscheidung erhöht die Übersichtlichkeit und erleichtert die Unterscheidung zwischen erfindungsgemäßen und nicht erfindungsgemäßen Abfüllverfahren. - Die in
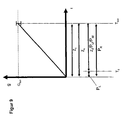
Figur 2 enthaltenen Pfeile deuten folgende Größen an: vR = Relativgeschwindigkeit, vF Geschwindigkeit mit der der Füllgutstand relativ zum Sackboden 39 steigt, Asoll = Sollabstand zwischen Mündung 31 und Füllgutspiegel 38, AM = Mindestanstand zwischen Sackboden 39 und Mündung 31. - In
Figur 3 ist der zeitliche Verlauf der Gewichtszunahme eines Sackes bei der Ausführung eines Sackbefüllungsverfahrens dargestellt. Auf der senkrechten Achse ist das Sackgewicht g und auf der waagrechten Achse die Zeit t aufgetragen. Mit der ersten Phase P1 der Sackbefüllung fallen in diesem Ausführungsbeispiel die Zeitspannen Z2 (volumetrische oder empirische Gewichtskontrolle oder Regelung) und Z3 (Unterspiegelbefüllung) zusammen. In dieser Phase P1 fallen also Störsignale bei der Gewichtskontrolle nicht auf, da die Gewichtssignale der Wägezellen 26 eben bei der hier volumetrischen oder empirischen Gewichtskontrolle ignoriert werden. Störsignale werden hier vor allem durch das Befüllorgan 2,21 hervorgerufen, dessen Füllgutaustrittsöffnung 31 sich ja in der Zeitspanne Z3, die hier mit der Phase 1 und Zeitspanne Z2 zusammenfällt, unterhalb des Befüllgutspiegels 38 befindet. In der Regel wird das Befüllorgan jedoch ganz zu Beginn der Befüllung oberhalb des Befüllgutspiegels 38 sein, da eben noch kein oder noch zu wenig Befüllgut im Sack 8 vorhanden ist. Diesem Umstand wird hier dadurch Rechnung getragen, dass die Zeitspanne Z3 eben nicht zum Zeitpunkt 0, sondern zum Zeitpunkt T2 beginnt. - Mit dem Erreichen des Zeitpunktes T1 beginnt die Phase P2 der Sackbefüllung. In der Regel wird man bei diesem Ausführungsbeispiel diesen Zeitpunkt als erreicht ansehen, wenn man aufgrund der volumetrischen Messung oder Abschätzung des Sackgewichtes davon ausgehen kann, dass ein bestimmter Anteil G1 des Sacksollgewichtes GSoll erreicht ist. Dieser Anteil kann 95 % sein. Im vorliegenden Ausführungsbeispiel (nach
Figur 3 ) ändern sich nun einige Parameter der Sackbefüllung: Das Sackgewicht wird tatsächlich über die Auswertung der Wägezellensignale überwacht und die Befüllung erfolgt, während sich das Befüllorgan 2,21 zur Gänze oberhalb des Befüllgutspiegels 38 befindet. Hierdurch wird die Güte der Gewichtsmessungen verbessert. Die Überwachung der Gewichtszunahme, um gegebenenfalls ein Alarmsignal bereitzustellen, wird bei diesem Ausführungsbeispiel während des ganzen Befüllvorgangs vorgenommen. Der Befüllvorgang endet, wenn das Sollgewicht GSoll erreicht ist. Hier erfolgt die Beendigung automatisch durch die nicht gezeigte Steuervorrichtung, wenn die Wägezellen 26 die gewünschten Signale an die Steuervorrichtung melden. Die Abfüllgeschwindigkeit ist in Phase 2 niedriger als in Phase 1. - Eine andere Variante dieses Verfahrens wird in
Figur 4 veranschaulicht. Es genügt an dieser Stelle, die Unterschiede zu dem inFigur 3 dargestellten Ausführungsbeispiel zu nennen: - Die Zeitspanne Z4, in der die Signale der Wägezellen auch zur Kontrolle/Regelung des Sackgewichts genutzt werden, dauert während des gesamten Befüllvorgangs an. Es findet keine volumetrische Gewichtskontrolle statt. Es ist vorteilhaft, wenn die Störsignale, die insbesondere während der Unterspiegelbefüllung (Z3) entstehen, durch Filter auf den Messsignalen beseitigt werden.
- In
Figur 5 wird auf verschiedene Phasen des Abfüllprozesses verzichtet. Während des gesamten Abfüllprozesses wird das Gewicht des Sackes zur Gewichtskontrolle/- regelung verwendet (Zeitspanne Z4). Sobald genug Material im Sack ist, wird im Unterspiegelverfahren befüllt (Zeitspanne Z3). Eine Reduktion der Sackgeschwindigkeit erfolgt nicht. Diese Maßnahmen können unter anderem bei hohen Anforderungen an die Filterung gelöst werden. - In
Figur 6 zeigt, wie sich bei dem inFigur 5 dargestellten Ausführungsbeispiel die erste Ableitung des Gewichts nach der Zeit g/t während des Befüllvorgangs verhält. Sie ist konstant. Die geschweifte Klammer S gibt den Sollbereich an. Dieser muss nicht unbedingt symmetrisch um den Sollwert G/TSoll verlaufen. Der Sollbereich S hat eine untere SU- und eine obere SO-Grenze. Die Pfeile 36, 37 deuten an, dass der Wert g/t den Sollbereich verlassen kann, wenn ein Fehler auftritt. Ein Verlauf der Gewichtsänderung gemäß dem Pfeil 36 kann in Folge eines Sackrisses auftreten. Wenn der Sollbereich S verlassen wird, wird ein Alarm ausgelöst, der Maßnahmen des Maschinenpersonals und/oder der Steuervorrichtung auslösen kann. - Allgemein haben Tests gezeigt, dass noch weitere technische Merkmale in allen erfindungsgemäßen Vorrichtungen und/oder Verfahren vorteilhaft einsetzbar sind:
- a) Das Sollgewicht GSoll sollte erreicht werden, während die Relativbewegung zwischen Sack 8 und Dosierorgan 2 noch andauert. Wie bereits mehrfach ausgeführt kann diese Relativbewegung durch eine Bewegung eines oder beider dieser beiden Elemente 2, 8 herbeigeführt werden. Es ist auch möglich, dass die Relativbewegung bereits unmittelbar nach dem Zeitpunkt verlangsamt oder beendet wird, an dem das letzte wirklich noch verwertete Messsignal der Wägezellen zustande kommt. Dieses kann vor dem Erreichen des Sollgewichtes sein, und die Zeitspanne zwischen diesem letzten Messsignal und dem Abbruch der Sackbefüllung bei Erreichen des Sollgewichts GSoll kann aus der Kenntnis der Abfüllgeschwindigkeit allein durch Zeitmesssung und Berechnung gewonnen werden. Alternativ kommt wieder eine kurze volumetrische Messphase Z2 in Betracht. Wichtig ist, dass gerade die wichtigen letzten Messwerte der Wägezellen nicht durch das Abbrechen der Bewegung, die ja positive oder negative Beschleunigungen hervorruft, verfälscht werden. Schließlich ist die Gewichtsmessung nach der Formel F=gm eine Kraftmessung und die Kraft ist mit der Beschleunigung über das Grundgesetz der Mechanik F=ma verknüpft. Trotz dieser Ausführung erscheint es möglich, insbesondere bei einer Überspiegelbefüllung, auch oben eine Relativbewegung gut zu messen.
- b) Die Relativbewegung zwischen Sack 8 und Dosierorgan 2 sollte während der Befüllung gleichförmig sein. Alternativ ist es auch möglich, wenn zu Beginn des Befüllprozesses eine Beschleunigungsphase stattfindet. Wichtig ist, dass die Relativbewegung gleichförmig ist, während die Wägezellensignale zur Gewichtskontrolle ausgewertet werden (Zeitspanne Z4). Bei gleichförmigen Bewegungen treten eben keine Beschleunigungen des teilweise befüllten Sackes 8 auf, die die Gewichtsmessung verfälschen würden. Eine Alternative zu dieser Vorgehensweise besteht darin, die Relativgeschwindigkeit aufzuzeichnen, etwaige Beschleunigungen zu ermitteln und die durch diese Beschleunigungen entstehenden Fehler gemäß der Formel F=ma aus dem Messwert herauszurechnen. Hierzu sollte auch das augenblickliche Gewicht des Sackes bekannt sein.
-
Figur 7 zeigt noch einmal dasselbe Ausführungsbeispiel wieFigur 3 , verwendet aber ergänzend die in Bezug auf die Messung des Sackgewichtes während der Unterspiegelbefüllung eingeführten Begriffe. Die Phase PU, in der im Unterspiegelverfahren befüllt wird ist gleichbedeutend mit der dritten Zeitspanne Z3. Dieser Zeitspanne geht hier die Phase PL voraus, in der die Mündung 31 des Befüllorgans 2 noch nicht unter dem Füllgutspiegel 38 liegt, da die Mündung 31 einen Mindestabstand AM über dem Sackboden 39 liegt und da noch nicht genug Gut im Sack 8 ist, um die Mündung 31 zu bedecken. In dieser Phase PL wird die Relativgeschwindigkeit vR zwischen Sack 8 und Dosierorgan 2 so eingestellt, dass sie langsamer ist als die Geschwindigkeit vF, mit der das Befüllgut im Sack steigt. vR kann hier auch Null sein. Daher "überholt" der Befüllgutspiegel 38 die Mündung 31, bis ein Sollabstand ASoll zwischen Füllgutspiegel 38 und Mündung 31 erreicht ist. Ab diesem Zeitpunkt T2 werden die Geschwindigkeiten vR und vF angeglichen, so dass der Abstand ASoll erhalten bleibt. - Wie erwähnt wird in der Phase PU im Unterspiegelverfahren befüllt. Wie bereits zu
Figur 3 ausgeführt werden jedoch die Gewichtsmesswerte hier nicht zur Kontrolle des Sackgewichts g verwendet. Allerdings werden in diesem Ausführungsbeispiel nach denFiguren 3 und7 die Wägezellensignale in der gesamten Zeitspanne Z1 zur Kontrolle der Abfüllgeschwindigkeit g/t verwendet. Daher dauert die Phase PM, in der die Messwerte in beliebiger Form verwertet werden, während im Unterspiegelverfahren befüllt wird, zwischen den Zeitpunkten T2 und T1 also während der gesamten Unterspiegelbefüllung an. Der Überlapp zwischen den Zeitspannen PR und PL deutet an, dass in der Phase PL (verlangsamte Relativbewegung vR zwischen Sack 8 und Dosierorgan 2) noch immer eine Relativgeschwindigkeit größer Null vorhanden ist. - In
Figur 8 , in der noch einmal das bereits inFigur 4 dargestellte Ausführungsbeispiel dargestellt wird, ist kein solcher Überlapp zwischen den Zeitspannen PR und PL vorhanden. Hier ist die Relativgeschwindigkeit vR in der Zeitspanne PL Null. Die Messsignale werden während des gesamten Befüllprozesses zur Gewichtskontrolle und zur Überwachung von Abfüllfehlern verwendet, so dass die Phase PM wieder während der gesamten Unterspiegelbefüllung andauert. Dies gilt auch mit Blick auf das in denFiguren 5 und9 dargestellte Ausführungsbeispiel.Bezugszeichenliste 1 Trichter 2 Dosierorgan 3 Anschlussstutzen 4 Transportmittel 5 Rahmen 6 Führung 7 Schnecke 8 Befüllter Sack 9 Vorzugrollen 10 Transportmittel 11 Leersack 12 Führung 13 Bodenschweißung 14 Kopfnahtschweißung 15 Schlauchfolienbahn 16 Sauger 17 Messer 18 Transportmittel 19 Abwickelvorrichtung 20 Verschluss 21 Verschlussrohr mit Filter 22 Filter 23 Stutzen 24 Produkt/Schüttgut 25 Oberer Rand des Sackes 26 Sensoren 27 Transportband 28 Gerichtete Strömung 29 Vibrationserzeuger 30 Kontrollwaage 31 Füllgutaustrittsöffnung 32 Führung 33 Gelenk 34 Sackbodenunterstützung 35 Doppelpfeil (Bewegung des Rahmens 5 mit dem Sack 8) 36 Pfeil (Abweichung vom Sollwert, Sackriss) 37 Pfeil (Abweichung vom Sollwert) 38 Füllgutpegel 39 Sackboden P1 Erste Phase des Befüllvorgangs bis T1 P2 Zweite Phase des Befüllvorgangs bis zum Erreichen von GSoll Z1 Erste Zeitspannung (Messung der Gewichtszunahme) Z2 Zweite Zeitspanne (volumetrisch oder empirisch) Z3 Dritte Zeitspanne (Unterspiegelbefüllung) Z4 Vierte Zeitspanne (Überwachung des Sackgewichts) Z5 Fünfte Zeitspanne (Überspiegelbefüllung) SO Obere Grenze des Sollbereichs SU Untere Grenze des Sollbereichs S Sollbereich der Gewichtszunahme g/t g/t Gewichtszunahme beziehungsweise -änderung pro Zeiteinheit, oder auch erste Ableitung des Sackgewichtes nach der Zeit g/t2 zweite Ableitung des Sackgewichtes nach der Zeit PU Erste Phase, Unterspiegelbefüllung PL Auftaktphase der Befüllung; Füllgutspiegel 38 noch nicht über Mündung 31 PM Zweite Phase, Messen des Gewichts während der Unterspiegelbefüllung PR Dritte Phase, Relativbewegung zwischen Sack und Dosierorgan vR Relativgeschwindigkeit zwischen Sack und Dosierorgan AM Mindestabstand zwischen Sackboden und der Mündung des Dosierorgans vF Geschwindigkeit, mit der der Füllgutspiegel steigt
Claims (10)
- Verfahren zum Herstellen, Befüllen mit staubigem oder körnigem Füllgut und Schließen eines Sackes, bei dem zumindest folgende Maßnahmen vorkommen:- die Befüllung eines Sackes (8) mit einem Befüllorgan (2),- die Relativbewegung zwischen dem Befüllorgan und dem Sack während der Befüllung des Sackes,- ein zumindest zeitweiliges Eintauchen von Teilen des Befüllorgans (2) unter den Befüllgutspiegel (38) während einer ersten Phase (PU), die während der Befüllung des Sackes liegt,- ein zumindest zeitweiliges Befinden der Austrittsöffnung des Befüllorgans über dem Befüllgutspiegel (38) während der Phase (P2)- wobei die Wägezellen (26) zumindest während einer zweiten Phase (PM), die zumindest Teile der ersten Phase (PU) umfasst, Messsignale liefern,- und dass diese Signale von der Steuereinrichtung zur Kontrolle und/oder Regelung des Abfüllvorganges genutzt werden,dadurch gekennzeichnet, dass
die Abfüllgeschwindigkeit des Füllgutes in der Phase (P2) niedriger ist als in der Phase (PU). - Verfahren nach Anspruch 1,
dadurch gekennzeichnet, dass
die Steuervorrichtung die Signale, die die Wägezellen (26) insbesondere während der zweiten Phase (PM) liefern, einer Filterung unterzieht. - Verfahren nach Anspruch 2,
dadurch gekennzeichnet, dass
bei der Filterung höherfrequenter Signale beseitigt werden. - Verfahren nach einem der vorstehenden Ansprüche,
dadurch gekennzeichnet, dass
zumindest während einer dritten Zeitspanne (PR), die zumindest Teile der zweiten Zeitspanne (PM) umfasst, eine Relativbewegung (vR) zwischen Sack- (8) und Dosierorgan (2) stattfindet. - Verfahren nach dem vorstehenden Anspruch,
dadurch gekennzeichnet, dass
die Relativbewegung (vR) zumindest zeitweise eine gleichförmige Bewegung ist. - Verfahren nach einem der vorstehenden Ansprüche,
dadurch gekennzeichnet, dass
die Steuereinrichtung die Messwerte der Wägezellen (26) zumindest auf eine oder lediglich auf eine der folgenden Weisen nutzt:- als Messwerte zur Überwachung beziehungsweise Regelung des Gewichts (g).- als Messwerte der Gewichtszunahme (g/t) zur Erkennung eines Fehlers im Abfüllprozess,- als erste Ableitung der Gewichtszunahme nach der Zeit (g/t2). - Verfahren nach einem der vorstehenden Ansprüche,
dadurch gekennzeichnet, dass
die Steuereinrichtung die Relativbewegung zwischen Sack (8) und Dosierorgan (2) und die Befüllung folgendermaßen steuert:- der Abstand zwischen der Mündung (31) des Befüllorgans (2) und dem Sackboden (39) wird auf einen Mindestabstand (AM) eingestellt,- die Sackbefüllung beginnt, wobei Befüllgut durch die Mündung (31) des Befüllorgans (2) in den Sack (8) strömt,- der Befüllgutspiegel steigt, wobei entweder keine Steigerung des Abstandes zwischen der Mündung (31) und dem Sackboden (39) durch eine Relativbewegung vorgenommen wird oder diese Relativbewegung langsamer ist als die Geschwindigkeit (vF), mit der der Füllgutpegel (38) steigt,- ein Beginn oder eine Steigerung der Geschwindigkeit (vR) der Relativbewegung, zu einem Zeitpunkt nachdem der Füllgutpegel (38) über der Mündung (31) liegt. - Verfahren nach dem vorstehenden Anspruch,
dadurch gekennzeichnet, dass
der Beginn oder die Steigerung der Geschwindigkeit der Relativbewegung (vR) vorgenommen wird, nachdem der Füllgutstand (38) über der Mündung (31) liegt, wenn ein Sollabstand (ASoll) zwischen der Mündung (31) und dem Füllgutstand (38) erreicht ist. - Verfahren nach dem vorstehenden Anspruch,
dadurch gekennzeichnet, dass
das Erreichen des Sollabstandes (ASoll) mit einem der folgenden Verfahren verifiziert wird:- einer Gewichtsmessung (g) durch die Auswertung von Wägezellensignalen- einer Messung der Abfüllgeschwindigkeit (g/t)- eine Messung mit einem optischen Sensor- eine volumetrische Messung - Verfahren nach einem der drei vorstehenden Ansprüche,
dadurch gekennzeichnet, dass
die Geschwindigkeit (vR) der Relativbewegung und die Geschwindigkeit (vF), mit der der Füllgutstand (38) steigt, einander angeglichen werden.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007014892A DE102007014892A1 (de) | 2007-03-26 | 2007-03-26 | Sackabfüllverfahren an einer Form-, Fill- und Seal-Maschine |
| PCT/EP2008/002429 WO2008116653A1 (de) | 2007-03-26 | 2008-03-21 | Sackabfüllverfahren an einer form-, fill- und seal-maschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP2139773A1 EP2139773A1 (de) | 2010-01-06 |
| EP2139773B1 true EP2139773B1 (de) | 2010-07-21 |
Family
ID=39590666
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08734811A Not-in-force EP2139773B1 (de) | 2007-03-26 | 2008-03-21 | Sackabfüllverfahren an einer form-, fill- und seal-maschine |
Country Status (5)
| Country | Link |
|---|---|
| EP (1) | EP2139773B1 (de) |
| AT (1) | ATE474774T1 (de) |
| DE (2) | DE102007014892A1 (de) |
| ES (1) | ES2348992T3 (de) |
| WO (1) | WO2008116653A1 (de) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5336412B2 (ja) * | 2010-04-01 | 2013-11-06 | 東洋自動機株式会社 | 袋詰め包装機における被包装物充填装置及び充填方法 |
| CN102390552B (zh) * | 2011-07-26 | 2013-02-20 | 广州市锐嘉包装设备有限公司 | 规则颗粒物料组合定量罐装机 |
| CN108528833A (zh) * | 2018-04-27 | 2018-09-14 | 丁涛 | 精确控制下料量的药物颗粒包装机和方法 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB579529A (en) * | 1943-06-18 | 1946-08-07 | Quaker Oats Co | Improvements in or relating to the packaging of materials |
| DE9301355U1 (de) | 1992-10-26 | 1993-11-25 | Windmöller & Hölscher, 49525 Lengerich | Vorrichtung zum Befüllen und Verschließen einseitig offener Säcke |
| DE4447051C2 (de) * | 1994-12-29 | 2002-07-04 | Rovema Gmbh | Verfahren zur portionsweisen Abgabe von Schüttgut |
| DE19920478C2 (de) | 1999-05-04 | 2001-05-03 | Windmoeller & Hoelscher | Vorrichtung zum Herstellen und vorzugsweise auch zum Befüllen und Verschließen von Säcken aus thermoplastischem Kunststoff |
| ATE313483T1 (de) | 2000-10-24 | 2006-01-15 | Windmoeller & Hoelscher | Vorrichtung zum herstellen und vorzugsweise auch zum befüllen und verschliessen von säcken aus thermoplastichem kunststoff |
| ITMI20030519A1 (it) | 2003-03-18 | 2004-09-19 | Concetti Spa | Apparecchiatura per il riempimento di sacchi con materiale |
| EA010320B1 (ru) * | 2004-06-30 | 2008-08-29 | Хафер & Бёккер Охг | Фасовочная установка |
| DE102004038323B4 (de) * | 2004-08-06 | 2006-10-26 | Khs Ag | Verfahren für das unterschichtige Füllen von Flaschen oder dergleichen Behälter sowie Füllmaschine zum Durchführen des Verfahrens |
| DE102005037916B4 (de) | 2004-11-11 | 2018-08-02 | Windmöller & Hölscher Kg | Maschine zum Formen, Füllen und Schließen von Säcken und Verfahren zum Betrieb derselben |
-
2007
- 2007-03-26 DE DE102007014892A patent/DE102007014892A1/de not_active Ceased
-
2008
- 2008-03-21 ES ES08734811T patent/ES2348992T3/es active Active
- 2008-03-21 DE DE502008000997T patent/DE502008000997D1/de active Active
- 2008-03-21 WO PCT/EP2008/002429 patent/WO2008116653A1/de not_active Ceased
- 2008-03-21 AT AT08734811T patent/ATE474774T1/de active
- 2008-03-21 EP EP08734811A patent/EP2139773B1/de not_active Not-in-force
Also Published As
| Publication number | Publication date |
|---|---|
| ATE474774T1 (de) | 2010-08-15 |
| EP2139773A1 (de) | 2010-01-06 |
| ES2348992T3 (es) | 2010-12-21 |
| DE502008000997D1 (de) | 2010-09-02 |
| WO2008116653A1 (de) | 2008-10-02 |
| DE102007014892A1 (de) | 2008-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1819596B1 (de) | Maschine zum formen, füllen und schliessen von säcken mit sackhebevorrichtung | |
| EP2785594B1 (de) | Packmaschine und verfahren zum füllen von säcken | |
| EP2006203B1 (de) | Packmaschine und Austrageeinrichtung für eine Packmaschine | |
| EP2621814B1 (de) | Vorrichtung und verfahren zum dosieren eines schüttguts | |
| EP2707286B1 (de) | Packmaschine und verfahren zum füllen von offenen säcken | |
| EP1975073B1 (de) | Maschine zum Füllen und Schliessen von Säcken | |
| WO2008151978A1 (de) | Verfahren und vorrichtung zum verpacken von polykristallinem siliciumbruch | |
| DE102012222249A1 (de) | Verpackung von Polysilicium | |
| EP2139773B1 (de) | Sackabfüllverfahren an einer form-, fill- und seal-maschine | |
| EP2896571B1 (de) | Dosier-vorrichtung und verfahren zum dosieren | |
| EP2139772B1 (de) | Wiegeverfahren für eine form-, fill- und seal-maschine | |
| WO2017174281A1 (de) | Vorrichtung zur abfüllung eines produkts | |
| DE102020134190B4 (de) | Verfahren zum Betrieb einer Schlauchbeutelmaschine | |
| EP3477037A1 (de) | Vorrichtung und verfahren zum befüllen eines abstandhalterrahmenschenkels oder abstandhalterrahmens | |
| AT508312B1 (de) | Formfehlererkennung | |
| EP0273254B1 (de) | Verfahren und Vorrichtung zum Abfüllen von Schüttgut, insbesondere Kaffee | |
| DE102011075431A1 (de) | Verfahren zum Optimieren der Förderung einer Packstoffbahn im Bereich einer Schlauchformeinrichtung einer Schlauchbeutelmaschine | |
| WO2008138689A1 (de) | Schlauchbeutelmaschine sowie verfahren zur überprüfung einer schlauchbeutelnaht | |
| DE102021129545A1 (de) | Prüf-Verfahren für Sauger-Einheit sowie Sauger-Einheit zur Durchführung des Verfahrens | |
| WO2022253504A2 (de) | Verfahren zum betrieb einer schlauchbeutelmaschine | |
| DE4215089A1 (de) | Anlage zum Füllen und Transportieren von Ventilsäcken | |
| DE29813689U1 (de) | Verpackungsanlage |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20091026 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| DAX | Request for extension of the european patent (deleted) | ||
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D |
|
| REF | Corresponds to: |
Ref document number: 502008000997 Country of ref document: DE Date of ref document: 20100902 Kind code of ref document: P |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: T3 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Effective date: 20101209 |
|
| LTIE | Lt: invalidation of european patent or patent extension |
Effective date: 20100721 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 Ref country code: NO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101021 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101121 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101021 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 Ref country code: HR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20101022 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 |
|
| 26N | No opposition filed |
Effective date: 20110426 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502008000997 Country of ref document: DE Effective date: 20110426 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110331 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20111130 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110331 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20120321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120331 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120331 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20120321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20110321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100721 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20100721 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 474774 Country of ref document: AT Kind code of ref document: T Effective date: 20130321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20130321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160321 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160321 |
|
| PGRI | Patent reinstated in contracting state [announced from national office to epo] |
Ref country code: IT Effective date: 20170710 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20190321 Year of fee payment: 12 Ref country code: DE Payment date: 20190331 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20190325 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20190425 Year of fee payment: 12 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20190328 Year of fee payment: 12 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502008000997 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MM Effective date: 20200401 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20200331 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200401 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20201001 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200331 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20210806 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200322 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20200321 |