EP1985761A2 - Procédé pour la détermination du degré de compaction d'asphalte et dispositif compacteur ainsi que système de détermination d'un degré de compaction - Google Patents
Procédé pour la détermination du degré de compaction d'asphalte et dispositif compacteur ainsi que système de détermination d'un degré de compaction Download PDFInfo
- Publication number
- EP1985761A2 EP1985761A2 EP08154648A EP08154648A EP1985761A2 EP 1985761 A2 EP1985761 A2 EP 1985761A2 EP 08154648 A EP08154648 A EP 08154648A EP 08154648 A EP08154648 A EP 08154648A EP 1985761 A2 EP1985761 A2 EP 1985761A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- compaction
- current
- parameters
- subarea
- subsection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/22—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for consolidating or finishing laid-down unset materials
- E01C19/23—Rollers therefor; Such rollers usable also for compacting soil
- E01C19/28—Vibrated rollers or rollers subjected to impacts, e.g. hammering blows
- E01C19/288—Vibrated rollers or rollers subjected to impacts, e.g. hammering blows adapted for monitoring characteristics of the material being compacted, e.g. indicating resonant frequency, measuring degree of compaction, by measuring values, detectable on the roller; using detected values to control operation of the roller, e.g. automatic adjustment of vibration responsive to such measurements
Definitions
- the present invention relates to a method for determining a degree of compaction of layers of hot material, in particular asphalt, according to claim 1 and a system for determining a degree of compaction according to claim 12 and a compacting machine according to claim 15.
- the stiffness value during acceleration is calculated from acceleration signals of the oscillating roller drum and ground using mathematical methods. The results are mapped and immediately visualized to the operator on a display unit
- a method and apparatus for determining the degree of compaction of a floor surface is already known.
- the floor surface to be processed is subdivided into unit surface sections.
- various data eg asphalt temperature or roller speed
- the degree of compaction of the unit surface section is then determined calculated as a partial compaction effect or a partial index number for the current crossing.
- the actual total compression efficiency for a unit area portion is determined by adding the actual partial compression efficiency to the total compression efficiency of the preceding passage of this unit area portion. This method is based on the assumption that the degree of compaction increases quasi-logarithmically over the number of crossings.
- a disadvantage of this method is the idealized subdivision of the ground surface to be processed in unit surface sections.
- a typical road with curves can not be clearly represented in the suggested way. Therefore, no unambiguous evaluation of the compaction work, especially at the edge regions of the bottom surface to be compacted, can take place.
- Another problem is that the paths of the compaction machines in reality do not run straight next to each other, but the surface is to be processed overlapping. In particular, with the simultaneous use of multiple compaction a punctual driving style is not possible and not desirable. Therefore, it may happen that the unit surface sections are only partially crossed by the compaction machines. If z. If, for example, a unit surface section is run over only once in half and evaluated as completely processed, the driver receives the information that the compaction work for this unit surface section has already been completed, even though the unit surface section is half unprocessed in the extreme case.
- the method according to the invention provides that to determine a degree of compaction of a surface section of a traffic area to be compacted, wherein the self-compacting surface section has a coated layer of a hot material, in particular asphalt, and the material cools continuously after application, first the applied layer of the surface section to be compacted is run over with at least one compaction machine.
- position data of a position of the compacting machine are determined via a positioning system.
- a current partial area of the surface section of the applied layer is determined. If the current partial surface lies partially or completely on already overrun parts of the surface section to be compacted, the current partial surface can also consist of several subsections already passed over.
- Suitable parameters for a position of the compaction machine are measured and / or recorded for the determination of the compaction effect and stored together with the position data.
- the parameters are then assigned to the current face or all subsections of the current face.
- the stored parameters are used to calculate a current degree of compaction for the current partial area or each subsection of the current partial area.
- a plurality of parameters are stored along with the position data associated with different patches or subsections of patches.
- the calculation thus uses all parameters previously stored for a surface to calculate the degree of compaction.
- the history of the compaction processing of the current subarea or the subarea of the current subarea can be taken into account, since the current degree of compaction can always be calculated from all measured or acquired raw data and non-partial compaction gains calculated to one previously calculated calculated total compression are added up.
- the size of a partial surface and / or the subsections of a partial surface are variable.
- the location of the subsections may be variable in a subarea.
- the size of the subsections of a subarea and / or the position of a subarea in a subarea may be determined as a function of the intersection of the subarea with at least one subarea and / or at least one subarea of a subarea of a preceding crossing.
- the size of the subsections of a subarea and / or the location of a subarea in a subarea may be determined depending on one or more of the parameters.
- variable division of the subareas or subsections and the variable position of the subsections in a subarea it is possible to represent the course of a surface section of a traffic area to be compacted very precisely. It is also possible to represent and take into account overlapping travel paths of the compacting machine or compaction machines.
- At least one parameter of the current subarea or a subsection of the current subarea is calculated as a function of a parameter of the current subarea.
- the subsections are preferably determined as a function of the number of crossings with regard to size and position in a subarea.
- the calculation of the current degree of compaction for this subsection for the current crossing need only be calculated once, since consistent parameters are stored over the entire subsection.
- a calculation must be carried out for a current partial area only for each subsection of the current partial area, so that a small number of calculations must be carried out.
- only a calculation of the degree of compaction must be performed for this subarea.
- the parameters used to calculate the current degree of compaction may include the number of crossings, the layer temperature, the speed of the compaction machine, the frequency of the bandage, the amplitude of the bandage, the type of compacting machine, the mass of the compacting machine, the cooling behavior of the layer, the compression type, the composition of the layer and / or the steering angle of the compacting machine.
- an at least further parameter is specified as a fixed parameter at the beginning of the method.
- a parameter may be, for example, the asphalt mixture, the weight of the compaction machine, or the compaction type.
- vibration is specified as a fixed parameter, for example as a compression mode
- this parameter can be changed to oscillation or static, for example, if the compacting machine compacts in this way in the course of the process.
- At least one stored parameter of a partial area or of a subsection of a preceding crossing is corrected as a function of a partial area representing a parameter and / or a time component.
- the parameter of the cooling behavior can be determined from the parameter of Layer temperature can be determined in conjunction with the layer temperature of the previous crossing.
- machining priorities for a partial area and / or a subsection of a partial area are calculated.
- the priority can be calculated from the current degree of compaction, the number of crossings, a time component, and / or individual parameters, such as the cooling behavior of a layer.
- the processing priority can be used to determine which subarea or subsection of a subarea must be processed next to ensure a good degree of compaction. If, for example, the temperature for processing becomes too low for a partial area and / or a lower portion of a partial area of the area section to be compacted, the calculated crossing priority for this area is very high, so that it can be judged that this area must be processed next ,
- the invention advantageously provides that, in a next step, the area section is displayed graphically, wherein the current degree of compaction, individual parameters and / or the processing priority are shown for each partial area and / or for each subsection of a partial area.
- the graphical representation of the information mentioned allows the operators of a compaction machine to control the compaction machine so that an optimal processing result for the area to be compacted arises.
- navigation data is derived from the current position data and the position data of the subareas and / or subsections of a subarea with the highest processing priorities can be calculated and displayed.
- the calculation of the navigation data can also take into account a time component as well as the speed of the compacting machine, so that a route which is optimal as a function of the processing priorities can be calculated and displayed.
- the invention further advantageously provides that data, preferably the measured or recorded parameters with position data, are transmitted to at least one further compacting machine and / or a central computer unit, so that in a network of several compacting machines all the compacting machines receive the data of each other compaction machines are available.
- data preferably the measured or recorded parameters with position data
- the invention further advantageously provides that data, preferably the measured or recorded parameters with position data, are transmitted to at least one further compacting machine and / or a central computer unit, so that in a network of several compacting machines all the compacting machines receive the data of each other compaction machines are available.
- the invention further provides a system for carrying out the method described above.
- the system preferably provides that the positioning system comprises a position data receiver for receiving satellite-based position data.
- the positioning system may comprise an optical positioning system, preferably a laser positioning system.
- the invention provides a compacting machine with the aforementioned system.
- the compaction machine has at least two temperature sensors for measuring the temperature of the applied layer, the parameter of the layer temperature being calculated from the temperatures measured with the sensors.
- one of the temperature sensors is arranged in front of the front axle and one of the temperature sensors behind the rear axle of the compacting machine.
- the parameter of the layer temperature is calculated by weighting the measured temperatures.
- Fig. 1 schematically represents a compaction machine 1, with which the inventive method for determining a degree of compaction of a surface portion to be compacted 7 a traffic area is feasible.
- the surface portion 7 of the traffic area to be compacted has a coated layer 3 of a hot material.
- the hot material may be, for example, asphalt.
- the compacting machine 1 passes over the area to be compacted section 7 in the direction of travel, as indicated by the in Fig. 1 indicated arrow is indicated.
- the front bandage 17 seen in the direction of travel and the rear bandage 19 seen in the direction of travel compress the applied layer 3.
- temperature sensors 20 measure the surface temperature of the applied layer 3
- Fig. 1 shown temperature sensors 20 are non-contact infrared thermometers, which can measure the temperature of the surface of the applied layer over a distance. Of course, other temperature measurement methods are possible.
- the compaction machine 1 has a position data receiver 21 of a positioning system, for example a GPS receiver. About the position determination system, the position of the compacting machine can be determined. The speed of the compacting machine, the frequency of the bandage, the amplitude of the bandage and the steering angle of the compacting machine can be determined via further sensors, not shown. For the method according to the invention, furthermore, the number of crossings can be registered, as well as the type of compacting machine, the mass of the compacting machine, the type of compaction and the composition of the layer.
- the applied layer 3 of the compacting surface section 7 is first passed over by the compacting machine 1.
- the position of the compaction machine 1 is determined via the position data receiver 21 of the position determination system.
- the position data receiver 21 receives satellite position data that can be converted into a position.
- the compaction machine 1 may comprise an optical positioning system, for example a laser positioning system, which may allow position determination, for example, in a tunnel passage in which a position determination via the satellite-based position determination system is not possible.
- Fig. 2a is to be compacted surface portion 7 a traffic area 5 shown.
- the reference numeral 15 denotes the schematically illustrated travel path of a compacting machine.
- the point denoted by the reference numeral 11 in the middle of the travel path 15 represents the position of the compacting machine determined by the positioning system.
- a vector in the direction of travel of the compacting machine is placed in the position of the compacting machine.
- a partial surface 9 of the surface section 7 is determined.
- suitable parameters are measured or recorded to determine the compaction effect.
- these parameters include, for example, the layer temperature, the speed of the compacting machine, the frequency of the bandage, the amplitude of the bandage and the steering angle of the compacting machine. Furthermore, the number of crossings is registered. At the in Fig. 2a Examples shown is the number of crossings n.
- the cooling behavior of the layer can be determined by determining the temperature difference of the current layer temperature with a layer temperature of a preceding crossing.
- weather data such as the outside temperature, the wind speed, the air pressure and the humidity.
- the type of compacting machine, the mass of the compacting machine, the type of compaction and the composition of the layer can be specified as fixed parameters.
- the parameters of the sub-area 9 are assigned. It is not necessarily necessary that the fixed parameters are also assigned to the sub-area, if it is assumed that these parameters are valid for the entire surface section to be compacted.
- Fig. 2b is the surface portion 7 of the traffic area 5 shown at a further crossing n + 1 of the compacting machine.
- the travel path of the compacting machine is designated by the reference numeral 15 '.
- certain sub-area 9 with the position 11 of the compacting machine is shown in dashed lines. How out Fig. 2b can be seen, the track 15 'of the crossing n + 1 overlaps with the track of the previously made crossing n.
- a partial area 9 ' is determined at the position 11' of the crossing n + 1 again a partial area 9 'is determined.
- the partial surface 9 ' is determined as a function of the position 11', the dimensions of the compacting machine and the direction of travel represented by the vector 11 '.
- the implementing system recognizes that an overlap of the routes has taken place. Therefore, the partial surface 9 'is divided into two subsections 13a and 13b. At the position 11 ', in turn, parameters are measured or recorded. These parameters are assigned to the subarea 9 'or to the individual subsections 13a and 13b of the subarea 9'.
- the degree of compaction is calculated for the partial surface 9 '.
- the degree of compaction in the calculation of the degree of compaction, all parameters previously stored for the area of a subarea or subsection are included in the calculation, a computation must be carried out for each subsection 13a, 13b to calculate the degree of compaction of the subarea 9 '.
- the parameters of the crossing n + 1 and the parameters of the passage n are used, since the subsection 13a lies on the subarea 9 of the passage n.
- the sub-section 13b only the parameters measured for the passage n + 1 at the position 11 'are used in the calculation of the degree of compaction.
- the sub-section 13b is divided according to the boundaries of the sub-areas or sub-sections of the previous crossings, so that the sub-area 9 'consists of more than two subsections. For each of the subsections, a degree of compaction is then calculated accordingly.
- the entire surface section to be compacted is subdivided into partial surfaces co-migrating with the compacting machine, wherein the sizes and position of the partial surfaces are variable.
- the current subareas are subdivided into smaller subsections, so that a very accurate calculation of the degree of compaction of the area section to be compacted can be carried out.
- an already stored parameter for a subarea for example the subarea n
- this parameter can be the cooling behavior of the layer. If, for example, the parameter of the cooling behavior of the layer at the crossing n + 1 yields that the cooling behavior of the layer previously stored for the partial surface 9 during the passage n and due to the time interval between the passage n + 1 to the crossing n and / or due to changing Weather conditions can no longer correspond to reality, so this can be corrected for the sub-area 9 parameters are corrected. It is also possible, instead of the correction of the stored parameter, to store a new parameter for the subarea 9 with a correspondingly provided time stamp.
- a processing priority for a partial area and / or a subsection of a partial area can be calculated with the aid of the temperature prognosis or with the aid of the cooling behavior of the layer become.
- the method according to the invention further provides that the surface section of the traffic area to be processed is visualized.
- the area section is graphically represented, wherein the current degree of compaction, individual parameters and / or the processing priority for each sub-area and / or for each subsection of a sub-area are shown.
- the individual sub-areas and / or the sub-sections are corresponding their priority in color. For example, it is possible to display the highest-priority sub-areas and / or sub-sections with a warning color, such as red, or blinking, so that the operator of a compacting machine immediately recognizes the areas to be processed next to obtain a good compaction result receive.
- navigation data are calculated, which are displayed to the operator of the machine, for example in the form of distance and direction. It is possible that a route is calculated from the navigation data, indicating the optimal path for processing the sub-areas or sub-sections with the highest processing priorities. In this way, a very effective editing with a very good compression result is possible.
- the individual compacting machines transmit their measured or recorded data and the associated position data to the other compacting machines, for example by radio, so that all the compacting machines receive the data of the other compacting machines also available.
- the compaction machines transmit the data to a central processing unit which makes a corresponding distribution of the data to the further compaction machines.
- each machine it is possible for each machine to calculate the respective compaction levels and priorities on the basis of the available data.
- the data it is also possible for the data to be collected in the central processing unit and for the calculations to be carried out accordingly. The results are then sent to the compaction machines for visual display as an indication to the operator.
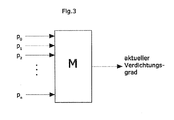
- FIG. 3 the calculation method for calculating the current degree of compaction is shown.
- p n denotes a parameter set recorded for the passage n.
- the parameter set p n consists of the previously described measured or recorded parameters, as well as the fixed parameters.
- the calculation method shown is the calculation method either for a partial area or for a subsection of a partial area.
- the partial area is determined depending on the overlap with previous crossings. It is crucial for this determination of the subsection that the same processing history exists over the entire subsection, ie that the same parameter sets p 0 -p n are present over the entire subsection.
- the current degree of compaction is calculated from the parameter sets p 0 -p n .
- the calculation model M has been determined with the aid of test series.
- the parameters of the individual parameter sets p 0 -p n are connected in the calculation model via a neural network, from which the current degree of compaction can be calculated.
- FIG. 4 is the graphical representation of the degree of compaction of a compacted surface portion 7 a traffic area 5 shown.
- the graphical representation shown the different gray levels indicate a different degree of compaction.
- the operating personnel of the compacting machine are thus informed of the individual degrees of compaction of the surface section to be compacted, so that the compacting machines can be directed to corresponding points which still have a low degree of compaction.
- a partial area may differ from the one in FIG FIG. 1 projected on the asphalt layer projected center of the front drum 17 extend forward in the direction of travel and extend the second part of the surface of the projected onto the layer 3 center of the rear drum in the direction of travel forward.
- the partial surfaces are determined as previously stated, depending on the position of the compacting machine.
- the extension of the partial surface is determined as a function of the dimensions of the compacting machine, in particular as a function of the width of the drum of the compacting machine, so that the width of a partial area corresponds to the width of a drum.
- the compacting machine shown is arranged in front of the front drum 17 and behind the rear drum 19 each have a temperature sensor. Both temperature sensors 20 detect the surface temperature of the layer 3. Due to the distance between the temperature sensors and the applied by the bandages 17 and 19 on the surface of the layer 3 water, which is sprayed during the processing of the layer 3 for cooling on the bandages 17,19 , the surface temperatures of the layer 3 detected by the two temperature sensors 20 are different.
- the for the inventive Layer temperature method used is therefore determined by a fixed weighting ratio between the two temperatures. It is also possible that the weighting of the temperatures for determining the layer temperature is variable, for example as a function of the amount of cooling water applied to the bandages 17 and 19.
- the temperature determination of the surface temperature of the layer 3 via two temperature sensors, which are arranged in front of the front bandage and behind the rear bandage in the direction of travel, is also possible independently of the previously described method according to the invention for determining a degree of compaction of a surface section of a traffic area to be compacted that the method for determining the layer temperature from the weighting of the detected temperatures can also be used in other methods, such as, for example, a stiffness measurement.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Road Paving Machines (AREA)
- Investigation Of Foundation Soil And Reinforcement Of Foundation Soil By Compacting Or Drainage (AREA)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007019419A DE102007019419A1 (de) | 2007-04-23 | 2007-04-23 | Verfahren zur Bestimmung eines Verdichtungsgrades von Asphalten sowie System zur Bestimmung eines Verdichtungsgrades |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1985761A2 true EP1985761A2 (fr) | 2008-10-29 |
| EP1985761A3 EP1985761A3 (fr) | 2012-08-29 |
| EP1985761B1 EP1985761B1 (fr) | 2013-12-11 |
Family
ID=39590550
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08154648.3A Revoked EP1985761B1 (fr) | 2007-04-23 | 2008-04-16 | Procédé pour la détermination du degré de compaction d'asphalte et dispositif compacteur ainsi que système de détermination d'un degré de compaction |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7873492B2 (fr) |
| EP (1) | EP1985761B1 (fr) |
| JP (1) | JP5137669B2 (fr) |
| DE (1) | DE102007019419A1 (fr) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013174458A1 (fr) * | 2012-05-22 | 2013-11-28 | Hamm Ag | Procédé de planification et de mise en œuvre de procédures de compactage du sol, en particulier de compactage d'asphalte |
| EP3447191A1 (fr) | 2017-08-24 | 2019-02-27 | MOBA - Mobile Automation AG | Dispositif et procédé pour contrôler le compactage |
| EP3992364A1 (fr) * | 2020-11-03 | 2022-05-04 | Hamm AG | Procédé de compactage de matières asphaltiques |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2366830B1 (fr) * | 2010-03-18 | 2016-05-11 | Joseph Vögele AG | Système et procédé d'application d'un revêtement routier |
| EP2366831B1 (fr) * | 2010-03-18 | 2014-12-24 | Joseph Vögele AG | Procédé de commande du procédé lors de la application d'un revêtement routier et finisseuse de route |
| DE102011104269A1 (de) | 2011-06-15 | 2012-12-20 | Wacker Neuson Produktion GmbH & Co. KG | Führungsdeichsel mit Energiespeicher |
| EP2844798A4 (fr) * | 2012-04-06 | 2016-08-24 | Univ Oklahoma | Procédé et appareil pour déterminer la rigidité d'une chaussée |
| US9169605B2 (en) * | 2013-05-23 | 2015-10-27 | Caterpillar Inc. | System and method for determining a state of compaction |
| JP2015108231A (ja) * | 2013-12-04 | 2015-06-11 | 道路工業株式会社 | テクスチャオートモニタリングシステム |
| US20150211199A1 (en) * | 2014-01-24 | 2015-07-30 | Caterpillar Inc. | Device and process to measure ground stiffness from compactors |
| DE102014203585A1 (de) * | 2014-02-27 | 2015-08-27 | Hamm Ag | Verfahren zur Bestimmung eines durch eine Oszillationsbewegung einer Verdichterwalze hervorgerufenen Schlupfzustandes der Verdichterwalze eines Bodenverdichters |
| US9534995B2 (en) * | 2014-06-11 | 2017-01-03 | Caterpillar Paving Products Inc. | System and method for determining a modulus of resilience |
| CN104153278A (zh) * | 2014-08-01 | 2014-11-19 | 中联重科股份有限公司 | 物料识别设备、方法、系统、筑路机械及模式选择方法 |
| PL2982951T3 (pl) | 2014-08-05 | 2019-04-30 | Voegele Ag J | Moduł termograficzny dla układarki |
| EP2990531A1 (fr) | 2014-08-27 | 2016-03-02 | Joseph Vögele AG | Système pour finisseuse de route avec un dispositif de mesure de température, procédé de détermination d'un comportement de refroidissement et support de stockage lisible par ordinateur |
| US9476168B2 (en) | 2014-08-29 | 2016-10-25 | Caterpillar Paving Products Inc. | Asphalt paver temperature alert system for asphalt compactor operator |
| US20160076205A1 (en) * | 2014-09-16 | 2016-03-17 | Caterpillar Paving Products Inc. | Device and Process for Controlling Compaction Based on Previously Mapped Data |
| US9423332B2 (en) * | 2014-10-14 | 2016-08-23 | Caterpillar Inc. | System and method for validating compaction of a work site |
| US9367042B2 (en) | 2014-10-21 | 2016-06-14 | Caterpillar Paving Products, Inc. | Machine alert when stopping on hot asphalt |
| JP6297968B2 (ja) * | 2014-12-25 | 2018-03-20 | 日立建機株式会社 | 締固め機械の評価装置 |
| US9587361B2 (en) | 2015-04-08 | 2017-03-07 | Caterpillar Paving Products Inc. | Temperature dependent auto adaptive compaction |
| SE539312C2 (en) * | 2015-06-10 | 2017-06-27 | Conny Andersson Med Firma Ca Konsult | A method of determining the quality of a newly produced asphalt pavement |
| CN105445445B (zh) * | 2015-11-18 | 2017-06-23 | 北京市政路桥建材集团有限公司 | 一种乳化沥青冷再生混合料多阶段施工控制方法 |
| DE102015122161A1 (de) * | 2015-12-18 | 2017-06-22 | Hamm Ag | Bodenverdichter und Verfahren zum Verdichten von Untergrund |
| US9856612B2 (en) | 2015-12-21 | 2018-01-02 | Caterpillar Paving Products Inc. | Compaction measurement using nearby sensors |
| DE102016207584B3 (de) * | 2016-05-03 | 2017-06-01 | Moba Mobile Automation Ag | Vorrichtung und verfahren zur bestimmung der temperatur eines durch eine baumaschine aufgebrachten strassenbaumaterials sowie eine baumaschine mit einer derartigen vorrichtung |
| DE102016007166A1 (de) | 2016-06-13 | 2017-12-14 | Bomag Gmbh | Walze zur Asphaltverdichtung, insbesondere Gummiradwalze, und Verfahren zum Besprühen eines Gummirads einer Walze zur Asphaltverdichtung |
| DE102017008602A1 (de) * | 2017-09-13 | 2019-03-14 | Bomag Gmbh | Verfahren zur Überwachung des Verdichtungsprozesses im Straßenbau und Straßenwalze |
| US10640943B2 (en) | 2017-12-14 | 2020-05-05 | Caterpillar Paving Products Inc. | System and method for compacting a worksite surface |
| US10787198B2 (en) * | 2018-10-15 | 2020-09-29 | Caterpillar Paving Products Inc. | Controlling compactor turning radius |
| DE102019107219A1 (de) * | 2019-03-21 | 2020-09-24 | Wacker Neuson Produktion GmbH & Co. KG | Bodenverdichtungsvorrichtung zum Verdichten eines Bodenbereiches |
| US20230139560A1 (en) * | 2021-11-01 | 2023-05-04 | Caterpillar Paving Products Inc. | Paving material segregation detection and monitoring |
| CN114197274A (zh) * | 2022-01-21 | 2022-03-18 | 山推工程机械股份有限公司 | 一种检测装置 |
| US20230287638A1 (en) * | 2022-03-09 | 2023-09-14 | Caterpillar Paving Products Inc. | Systems and methods for estimating material compaction based on electric motor drive power |
| DE102023106491A1 (de) | 2023-03-15 | 2024-09-19 | Wacker Neuson Produktion GmbH & Co. KG | System und Verfahren zum Führen einer Bedienperson während einer Bodenverdichtung mit einer Bodenverdichtungsvorrichtung |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0698152A1 (fr) | 1993-04-29 | 1996-02-28 | Geodynamik H Thurner AB | Indice de compacite |
| EP1705293A1 (fr) | 2005-03-23 | 2006-09-27 | Ammann Aufbereitung AG | Méthode et dispositif pour compaction d'une zone de sol |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE455002B (sv) * | 1984-05-08 | 1988-06-13 | Nilsson Peter | Metanordning for metning av packningsgraden i byggnadsmaterial for damm- och vegbyggnadsendamal |
| SE445566B (sv) * | 1984-11-19 | 1986-06-30 | Thurner Geodynamik Ab | Forfarande for att uppskatta den packningsgrad som uppnas vid packning samt anordning for att meta packningsgrad for genomforandet av forfarandet |
| US5123778A (en) * | 1990-09-26 | 1992-06-23 | Bohnhoff William W | Method of paving |
| EP0503940B1 (fr) * | 1991-03-13 | 1997-09-17 | Westinghouse Electric Corporation | Méthode de détermination du degré de déformation induite dans un matérial, en réponse à une force compressive |
| JP2565920Y2 (ja) * | 1991-07-03 | 1998-03-25 | 日本鋪道株式会社 | 締固め度測定装置 |
| DE4124193A1 (de) * | 1991-07-20 | 1993-01-21 | Wacker Werke Kg | Verfahren zum feststellen und anzeigen der beim arbeiten mit einem bodenverdichtungsgeraet erreichten bodendichte |
| US5426972A (en) * | 1993-04-20 | 1995-06-27 | Gas Research Institute | Monitoring soil compaction |
| US5471391A (en) * | 1993-12-08 | 1995-11-28 | Caterpillar Inc. | Method and apparatus for operating compacting machinery relative to a work site |
| FR2738022B1 (fr) * | 1995-08-21 | 1997-11-14 | Etat Francais Laboratoire Cent | Procede et materiel d'aide a la conduite d'une machine de compactage |
| JPH09125700A (ja) * | 1995-11-07 | 1997-05-13 | Fujita Corp | 振動ローラの遠隔操作支援システム |
| US6460006B1 (en) * | 1998-12-23 | 2002-10-01 | Caterpillar Inc | System for predicting compaction performance |
| DE19956943B4 (de) * | 1999-11-26 | 2020-03-19 | Bomag Gmbh | Vorrichtung zur Kontrolle der Verdichtung bei Vibrationsverdichtungsgeräten |
| DE10028949A1 (de) * | 2000-06-16 | 2002-03-07 | Bomag Gmbh | Verfahren und Vorrichtung zur Bestimmung des Verdichtungsgrades bei der Bodenverdichtung |
| JP2002115207A (ja) * | 2000-10-11 | 2002-04-19 | Kajima Road Co Ltd | 舗装用材の締固め車両 |
| JP4362646B2 (ja) * | 2001-07-06 | 2009-11-11 | 農工大ティー・エル・オー株式会社 | 土壌特性観測装置 |
| JP4084608B2 (ja) * | 2001-09-20 | 2008-04-30 | 大成建設株式会社 | 締め固め管理装置 |
| US6821052B2 (en) * | 2001-10-09 | 2004-11-23 | William Harrison Zurn | Modular, robotic road repair machine |
| JP3927458B2 (ja) * | 2002-07-08 | 2007-06-06 | 大成建設株式会社 | 締め固め領域の管理方法 |
| US6973821B2 (en) * | 2004-02-19 | 2005-12-13 | Caterpillar Inc. | Compaction quality assurance based upon quantifying compactor interaction with base material |
| US20060034660A1 (en) * | 2004-08-10 | 2006-02-16 | Satzler Ronald L | Belted asphalt compactor |
| US7428455B2 (en) * | 2004-10-12 | 2008-09-23 | Caterpillar Inc. | Compaction indication by effective rolling radius |
| US20080267719A1 (en) * | 2007-04-24 | 2008-10-30 | Caterpillar Inc. | Towed compaction determination system utilizing drawbar force |
| US8099218B2 (en) * | 2007-11-30 | 2012-01-17 | Caterpillar Inc. | Paving system and method |
-
2007
- 2007-04-23 DE DE102007019419A patent/DE102007019419A1/de active Pending
-
2008
- 2008-04-16 EP EP08154648.3A patent/EP1985761B1/fr not_active Revoked
- 2008-04-22 JP JP2008111397A patent/JP5137669B2/ja active Active
- 2008-04-22 US US12/081,797 patent/US7873492B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0698152A1 (fr) | 1993-04-29 | 1996-02-28 | Geodynamik H Thurner AB | Indice de compacite |
| EP1705293A1 (fr) | 2005-03-23 | 2006-09-27 | Ammann Aufbereitung AG | Méthode et dispositif pour compaction d'une zone de sol |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013174458A1 (fr) * | 2012-05-22 | 2013-11-28 | Hamm Ag | Procédé de planification et de mise en œuvre de procédures de compactage du sol, en particulier de compactage d'asphalte |
| EP2852707B1 (fr) | 2012-05-22 | 2016-10-12 | Hamm AG | Procédé de planification et de mise en oeuvre de procédures de compactage du sol, en particulier de compactage d'asphalte |
| US9982397B2 (en) | 2012-05-22 | 2018-05-29 | Hamm Ag | Method for planning and implementation of soil compacting processes, especially for asphalt compacting |
| EP3447191A1 (fr) | 2017-08-24 | 2019-02-27 | MOBA - Mobile Automation AG | Dispositif et procédé pour contrôler le compactage |
| EP3992364A1 (fr) * | 2020-11-03 | 2022-05-04 | Hamm AG | Procédé de compactage de matières asphaltiques |
| AU2021261837B2 (en) * | 2020-11-03 | 2023-08-24 | Hamm Ag | Method for compacting asphalt material |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5137669B2 (ja) | 2013-02-06 |
| EP1985761A3 (fr) | 2012-08-29 |
| US20080260462A1 (en) | 2008-10-23 |
| DE102007019419A1 (de) | 2008-10-30 |
| EP1985761B1 (fr) | 2013-12-11 |
| JP2008268217A (ja) | 2008-11-06 |
| US7873492B2 (en) | 2011-01-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1985761B1 (fr) | Procédé pour la détermination du degré de compaction d'asphalte et dispositif compacteur ainsi que système de détermination d'un degré de compaction | |
| DE69434631T2 (de) | Verfahren und Vorrichtung zum Messen des Verdichtungsgrads einer Bodenfläche | |
| EP3456878B1 (fr) | Procédé de surveillance du processus de compactage lors de la construction de route et rouleau compresseur | |
| EP2515195B1 (fr) | Système de commande d'engins de chantier | |
| DE69501401T2 (de) | Verfahren und vorrichtung zur überwachung und koordination von mehreren bodenbearbeitenden maschinen auf einer baustelle | |
| DE102008042454B4 (de) | Wachzustand-Schätzvorrichtung | |
| DE112016000279T5 (de) | Systeme und verfahren zur führung einer verdichtungsmaschine | |
| WO2017097555A1 (fr) | Procédé pour assiter le conducteur d'un véhicule automobile concernant une manœuvre de dépassement imminente et véhicule automobile | |
| WO2006037360A1 (fr) | Systeme pour informer un conducteur de la possibilite d'effectuer des depassements | |
| EP3502821A1 (fr) | Engin de construction et procédé de commande d'un engin de construction | |
| EP1613812A1 (fr) | Systeme et procede de compactage de sol automatise | |
| DE102015013808B4 (de) | Vorrichtung und Verfahren zur Steuerung der Dämpfung eines Fahrzeugs | |
| EP3147406B1 (fr) | Système de mesure et procédé destinés au contrôle de compression d'un revêtement et programme d'ordinateur avec un code de programme pour exécuter la procédure | |
| DE102020117095A1 (de) | Automatische breiteneingabe für strassenfertigungsvorgänge | |
| EP3896223A1 (fr) | Procédé de finition d'un revêtement routier et système d'asphaltage | |
| WO2017194255A1 (fr) | Procédé de reproduction d'une représentation cartographique dans un véhicule en fonction de la situation de conduite | |
| DE102004016745A1 (de) | Fahrzeugnavigationsvorrichtung | |
| DE102007053610A1 (de) | Verfahren zur Bestimmung der Verdichtung in landwirtschaftlichen Horizontalsilos | |
| DE102014100569A1 (de) | Navigationsverfahren und Navigationssystem | |
| DE102022115469A1 (de) | System und verfahren zur markierung einer begrenzung während der definition eines autonomen arbeitsbereichs | |
| DE102014007783A1 (de) | Verfahren zur Verdichtung von heißem Asphalt. | |
| EP4313711A1 (fr) | Analyse de conducteur basée sur un segment et assistance au conducteur individualisée | |
| DE102019120490B4 (de) | Verfahren und System zur Erkennung und Bewertung von Fahrbahncharakteristiken mittels eines Fahrzeugs | |
| EP3398828B1 (fr) | Système d'aide à la conduite et procédé permettant d'assister un conducteur d'un véhicule ferroviaire | |
| DE10234367B3 (de) | Verfahren zur Abbildung des Verkehrszustandes und System zur Verkehrsorganisation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E01C 19/28 20060101AFI20120726BHEP |
|
| 17P | Request for examination filed |
Effective date: 20130228 |
|
| AKX | Designation fees paid |
Designated state(s): CH CZ DE FR LI SE |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20130711 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH CZ DE FR LI SE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: ISLER AND PEDRAZZINI AG, CH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502008011048 Country of ref document: DE Effective date: 20140130 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502008011048 Country of ref document: DE |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| 26 | Opposition filed |
Opponent name: CATERPILLAR INC. Effective date: 20140902 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: ABG ALLGEMEINE BAUMASCHINEN-GESELLSCHAFT MBH Effective date: 20140910 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502008011048 Country of ref document: DE Effective date: 20140902 |
|
| PLAB | Opposition data, opponent's data or that of the opponent's representative modified |
Free format text: ORIGINAL CODE: 0009299OPPO |
|
| R26 | Opposition filed (corrected) |
Opponent name: CATERPILLAR INC. Effective date: 20140902 |
|
| PLAF | Information modified related to communication of a notice of opposition and request to file observations + time limit |
Free format text: ORIGINAL CODE: EPIDOSCOBS2 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 8 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| PLCK | Communication despatched that opposition was rejected |
Free format text: ORIGINAL CODE: EPIDOSNREJ1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| APBQ | Date of receipt of statement of grounds of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA3O |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20210430 Year of fee payment: 14 Ref country code: CZ Payment date: 20210406 Year of fee payment: 14 Ref country code: FR Payment date: 20210421 Year of fee payment: 14 |
|
| APBU | Appeal procedure closed |
Free format text: ORIGINAL CODE: EPIDOSNNOA9O |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R103 Ref document number: 502008011048 Country of ref document: DE Ref country code: DE Ref legal event code: R064 Ref document number: 502008011048 Country of ref document: DE |
|
| RDAF | Communication despatched that patent is revoked |
Free format text: ORIGINAL CODE: EPIDOSNREV1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: PATENT REVOKED |
|
| RDAG | Patent revoked |
Free format text: ORIGINAL CODE: 0009271 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 27W | Patent revoked |
Effective date: 20220121 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: ECNC |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20220422 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20220421 Year of fee payment: 15 |