EP1985761A2 - Method for determining the degree of compaction of asphalt and compacting machine as well as system for determining degree of compaction - Google Patents
Method for determining the degree of compaction of asphalt and compacting machine as well as system for determining degree of compaction Download PDFInfo
- Publication number
- EP1985761A2 EP1985761A2 EP08154648A EP08154648A EP1985761A2 EP 1985761 A2 EP1985761 A2 EP 1985761A2 EP 08154648 A EP08154648 A EP 08154648A EP 08154648 A EP08154648 A EP 08154648A EP 1985761 A2 EP1985761 A2 EP 1985761A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- compaction
- current
- parameters
- subarea
- subsection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images



Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01C—CONSTRUCTION OF, OR SURFACES FOR, ROADS, SPORTS GROUNDS, OR THE LIKE; MACHINES OR AUXILIARY TOOLS FOR CONSTRUCTION OR REPAIR
- E01C19/00—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving
- E01C19/22—Machines, tools or auxiliary devices for preparing or distributing paving materials, for working the placed materials, or for forming, consolidating, or finishing the paving for consolidating or finishing laid-down unset materials
- E01C19/23—Rollers therefor; Such rollers usable also for compacting soil
- E01C19/28—Vibrated rollers or rollers subjected to impacts, e.g. hammering blows
- E01C19/288—Vibrated rollers or rollers subjected to impacts, e.g. hammering blows adapted for monitoring characteristics of the material being compacted, e.g. indicating resonant frequency, measuring degree of compaction, by measuring values, detectable on the roller; using detected values to control operation of the roller, e.g. automatic adjustment of vibration responsive to such measurements
Definitions
- the present invention relates to a method for determining a degree of compaction of layers of hot material, in particular asphalt, according to claim 1 and a system for determining a degree of compaction according to claim 12 and a compacting machine according to claim 15.
- the stiffness value during acceleration is calculated from acceleration signals of the oscillating roller drum and ground using mathematical methods. The results are mapped and immediately visualized to the operator on a display unit
- a method and apparatus for determining the degree of compaction of a floor surface is already known.
- the floor surface to be processed is subdivided into unit surface sections.
- various data eg asphalt temperature or roller speed
- the degree of compaction of the unit surface section is then determined calculated as a partial compaction effect or a partial index number for the current crossing.
- the actual total compression efficiency for a unit area portion is determined by adding the actual partial compression efficiency to the total compression efficiency of the preceding passage of this unit area portion. This method is based on the assumption that the degree of compaction increases quasi-logarithmically over the number of crossings.
- a disadvantage of this method is the idealized subdivision of the ground surface to be processed in unit surface sections.
- a typical road with curves can not be clearly represented in the suggested way. Therefore, no unambiguous evaluation of the compaction work, especially at the edge regions of the bottom surface to be compacted, can take place.
- Another problem is that the paths of the compaction machines in reality do not run straight next to each other, but the surface is to be processed overlapping. In particular, with the simultaneous use of multiple compaction a punctual driving style is not possible and not desirable. Therefore, it may happen that the unit surface sections are only partially crossed by the compaction machines. If z. If, for example, a unit surface section is run over only once in half and evaluated as completely processed, the driver receives the information that the compaction work for this unit surface section has already been completed, even though the unit surface section is half unprocessed in the extreme case.
- the method according to the invention provides that to determine a degree of compaction of a surface section of a traffic area to be compacted, wherein the self-compacting surface section has a coated layer of a hot material, in particular asphalt, and the material cools continuously after application, first the applied layer of the surface section to be compacted is run over with at least one compaction machine.
- position data of a position of the compacting machine are determined via a positioning system.
- a current partial area of the surface section of the applied layer is determined. If the current partial surface lies partially or completely on already overrun parts of the surface section to be compacted, the current partial surface can also consist of several subsections already passed over.
- Suitable parameters for a position of the compaction machine are measured and / or recorded for the determination of the compaction effect and stored together with the position data.
- the parameters are then assigned to the current face or all subsections of the current face.
- the stored parameters are used to calculate a current degree of compaction for the current partial area or each subsection of the current partial area.
- a plurality of parameters are stored along with the position data associated with different patches or subsections of patches.
- the calculation thus uses all parameters previously stored for a surface to calculate the degree of compaction.
- the history of the compaction processing of the current subarea or the subarea of the current subarea can be taken into account, since the current degree of compaction can always be calculated from all measured or acquired raw data and non-partial compaction gains calculated to one previously calculated calculated total compression are added up.
- the size of a partial surface and / or the subsections of a partial surface are variable.
- the location of the subsections may be variable in a subarea.
- the size of the subsections of a subarea and / or the position of a subarea in a subarea may be determined as a function of the intersection of the subarea with at least one subarea and / or at least one subarea of a subarea of a preceding crossing.
- the size of the subsections of a subarea and / or the location of a subarea in a subarea may be determined depending on one or more of the parameters.
- variable division of the subareas or subsections and the variable position of the subsections in a subarea it is possible to represent the course of a surface section of a traffic area to be compacted very precisely. It is also possible to represent and take into account overlapping travel paths of the compacting machine or compaction machines.
- At least one parameter of the current subarea or a subsection of the current subarea is calculated as a function of a parameter of the current subarea.
- the subsections are preferably determined as a function of the number of crossings with regard to size and position in a subarea.
- the calculation of the current degree of compaction for this subsection for the current crossing need only be calculated once, since consistent parameters are stored over the entire subsection.
- a calculation must be carried out for a current partial area only for each subsection of the current partial area, so that a small number of calculations must be carried out.
- only a calculation of the degree of compaction must be performed for this subarea.
- the parameters used to calculate the current degree of compaction may include the number of crossings, the layer temperature, the speed of the compaction machine, the frequency of the bandage, the amplitude of the bandage, the type of compacting machine, the mass of the compacting machine, the cooling behavior of the layer, the compression type, the composition of the layer and / or the steering angle of the compacting machine.
- an at least further parameter is specified as a fixed parameter at the beginning of the method.
- a parameter may be, for example, the asphalt mixture, the weight of the compaction machine, or the compaction type.
- vibration is specified as a fixed parameter, for example as a compression mode
- this parameter can be changed to oscillation or static, for example, if the compacting machine compacts in this way in the course of the process.
- At least one stored parameter of a partial area or of a subsection of a preceding crossing is corrected as a function of a partial area representing a parameter and / or a time component.
- the parameter of the cooling behavior can be determined from the parameter of Layer temperature can be determined in conjunction with the layer temperature of the previous crossing.
- machining priorities for a partial area and / or a subsection of a partial area are calculated.
- the priority can be calculated from the current degree of compaction, the number of crossings, a time component, and / or individual parameters, such as the cooling behavior of a layer.
- the processing priority can be used to determine which subarea or subsection of a subarea must be processed next to ensure a good degree of compaction. If, for example, the temperature for processing becomes too low for a partial area and / or a lower portion of a partial area of the area section to be compacted, the calculated crossing priority for this area is very high, so that it can be judged that this area must be processed next ,
- the invention advantageously provides that, in a next step, the area section is displayed graphically, wherein the current degree of compaction, individual parameters and / or the processing priority are shown for each partial area and / or for each subsection of a partial area.
- the graphical representation of the information mentioned allows the operators of a compaction machine to control the compaction machine so that an optimal processing result for the area to be compacted arises.
- navigation data is derived from the current position data and the position data of the subareas and / or subsections of a subarea with the highest processing priorities can be calculated and displayed.
- the calculation of the navigation data can also take into account a time component as well as the speed of the compacting machine, so that a route which is optimal as a function of the processing priorities can be calculated and displayed.
- the invention further advantageously provides that data, preferably the measured or recorded parameters with position data, are transmitted to at least one further compacting machine and / or a central computer unit, so that in a network of several compacting machines all the compacting machines receive the data of each other compaction machines are available.
- data preferably the measured or recorded parameters with position data
- the invention further advantageously provides that data, preferably the measured or recorded parameters with position data, are transmitted to at least one further compacting machine and / or a central computer unit, so that in a network of several compacting machines all the compacting machines receive the data of each other compaction machines are available.
- the invention further provides a system for carrying out the method described above.
- the system preferably provides that the positioning system comprises a position data receiver for receiving satellite-based position data.
- the positioning system may comprise an optical positioning system, preferably a laser positioning system.
- the invention provides a compacting machine with the aforementioned system.
- the compaction machine has at least two temperature sensors for measuring the temperature of the applied layer, the parameter of the layer temperature being calculated from the temperatures measured with the sensors.
- one of the temperature sensors is arranged in front of the front axle and one of the temperature sensors behind the rear axle of the compacting machine.
- the parameter of the layer temperature is calculated by weighting the measured temperatures.
- Fig. 1 schematically represents a compaction machine 1, with which the inventive method for determining a degree of compaction of a surface portion to be compacted 7 a traffic area is feasible.
- the surface portion 7 of the traffic area to be compacted has a coated layer 3 of a hot material.
- the hot material may be, for example, asphalt.
- the compacting machine 1 passes over the area to be compacted section 7 in the direction of travel, as indicated by the in Fig. 1 indicated arrow is indicated.
- the front bandage 17 seen in the direction of travel and the rear bandage 19 seen in the direction of travel compress the applied layer 3.
- temperature sensors 20 measure the surface temperature of the applied layer 3
- Fig. 1 shown temperature sensors 20 are non-contact infrared thermometers, which can measure the temperature of the surface of the applied layer over a distance. Of course, other temperature measurement methods are possible.
- the compaction machine 1 has a position data receiver 21 of a positioning system, for example a GPS receiver. About the position determination system, the position of the compacting machine can be determined. The speed of the compacting machine, the frequency of the bandage, the amplitude of the bandage and the steering angle of the compacting machine can be determined via further sensors, not shown. For the method according to the invention, furthermore, the number of crossings can be registered, as well as the type of compacting machine, the mass of the compacting machine, the type of compaction and the composition of the layer.
- the applied layer 3 of the compacting surface section 7 is first passed over by the compacting machine 1.
- the position of the compaction machine 1 is determined via the position data receiver 21 of the position determination system.
- the position data receiver 21 receives satellite position data that can be converted into a position.
- the compaction machine 1 may comprise an optical positioning system, for example a laser positioning system, which may allow position determination, for example, in a tunnel passage in which a position determination via the satellite-based position determination system is not possible.
- Fig. 2a is to be compacted surface portion 7 a traffic area 5 shown.
- the reference numeral 15 denotes the schematically illustrated travel path of a compacting machine.
- the point denoted by the reference numeral 11 in the middle of the travel path 15 represents the position of the compacting machine determined by the positioning system.
- a vector in the direction of travel of the compacting machine is placed in the position of the compacting machine.
- a partial surface 9 of the surface section 7 is determined.
- suitable parameters are measured or recorded to determine the compaction effect.
- these parameters include, for example, the layer temperature, the speed of the compacting machine, the frequency of the bandage, the amplitude of the bandage and the steering angle of the compacting machine. Furthermore, the number of crossings is registered. At the in Fig. 2a Examples shown is the number of crossings n.
- the cooling behavior of the layer can be determined by determining the temperature difference of the current layer temperature with a layer temperature of a preceding crossing.
- weather data such as the outside temperature, the wind speed, the air pressure and the humidity.
- the type of compacting machine, the mass of the compacting machine, the type of compaction and the composition of the layer can be specified as fixed parameters.
- the parameters of the sub-area 9 are assigned. It is not necessarily necessary that the fixed parameters are also assigned to the sub-area, if it is assumed that these parameters are valid for the entire surface section to be compacted.
- Fig. 2b is the surface portion 7 of the traffic area 5 shown at a further crossing n + 1 of the compacting machine.
- the travel path of the compacting machine is designated by the reference numeral 15 '.
- certain sub-area 9 with the position 11 of the compacting machine is shown in dashed lines. How out Fig. 2b can be seen, the track 15 'of the crossing n + 1 overlaps with the track of the previously made crossing n.
- a partial area 9 ' is determined at the position 11' of the crossing n + 1 again a partial area 9 'is determined.
- the partial surface 9 ' is determined as a function of the position 11', the dimensions of the compacting machine and the direction of travel represented by the vector 11 '.
- the implementing system recognizes that an overlap of the routes has taken place. Therefore, the partial surface 9 'is divided into two subsections 13a and 13b. At the position 11 ', in turn, parameters are measured or recorded. These parameters are assigned to the subarea 9 'or to the individual subsections 13a and 13b of the subarea 9'.
- the degree of compaction is calculated for the partial surface 9 '.
- the degree of compaction in the calculation of the degree of compaction, all parameters previously stored for the area of a subarea or subsection are included in the calculation, a computation must be carried out for each subsection 13a, 13b to calculate the degree of compaction of the subarea 9 '.
- the parameters of the crossing n + 1 and the parameters of the passage n are used, since the subsection 13a lies on the subarea 9 of the passage n.
- the sub-section 13b only the parameters measured for the passage n + 1 at the position 11 'are used in the calculation of the degree of compaction.
- the sub-section 13b is divided according to the boundaries of the sub-areas or sub-sections of the previous crossings, so that the sub-area 9 'consists of more than two subsections. For each of the subsections, a degree of compaction is then calculated accordingly.
- the entire surface section to be compacted is subdivided into partial surfaces co-migrating with the compacting machine, wherein the sizes and position of the partial surfaces are variable.
- the current subareas are subdivided into smaller subsections, so that a very accurate calculation of the degree of compaction of the area section to be compacted can be carried out.
- an already stored parameter for a subarea for example the subarea n
- this parameter can be the cooling behavior of the layer. If, for example, the parameter of the cooling behavior of the layer at the crossing n + 1 yields that the cooling behavior of the layer previously stored for the partial surface 9 during the passage n and due to the time interval between the passage n + 1 to the crossing n and / or due to changing Weather conditions can no longer correspond to reality, so this can be corrected for the sub-area 9 parameters are corrected. It is also possible, instead of the correction of the stored parameter, to store a new parameter for the subarea 9 with a correspondingly provided time stamp.
- a processing priority for a partial area and / or a subsection of a partial area can be calculated with the aid of the temperature prognosis or with the aid of the cooling behavior of the layer become.
- the method according to the invention further provides that the surface section of the traffic area to be processed is visualized.
- the area section is graphically represented, wherein the current degree of compaction, individual parameters and / or the processing priority for each sub-area and / or for each subsection of a sub-area are shown.
- the individual sub-areas and / or the sub-sections are corresponding their priority in color. For example, it is possible to display the highest-priority sub-areas and / or sub-sections with a warning color, such as red, or blinking, so that the operator of a compacting machine immediately recognizes the areas to be processed next to obtain a good compaction result receive.
- navigation data are calculated, which are displayed to the operator of the machine, for example in the form of distance and direction. It is possible that a route is calculated from the navigation data, indicating the optimal path for processing the sub-areas or sub-sections with the highest processing priorities. In this way, a very effective editing with a very good compression result is possible.
- the individual compacting machines transmit their measured or recorded data and the associated position data to the other compacting machines, for example by radio, so that all the compacting machines receive the data of the other compacting machines also available.
- the compaction machines transmit the data to a central processing unit which makes a corresponding distribution of the data to the further compaction machines.
- each machine it is possible for each machine to calculate the respective compaction levels and priorities on the basis of the available data.
- the data it is also possible for the data to be collected in the central processing unit and for the calculations to be carried out accordingly. The results are then sent to the compaction machines for visual display as an indication to the operator.
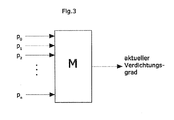
- FIG. 3 the calculation method for calculating the current degree of compaction is shown.
- p n denotes a parameter set recorded for the passage n.
- the parameter set p n consists of the previously described measured or recorded parameters, as well as the fixed parameters.
- the calculation method shown is the calculation method either for a partial area or for a subsection of a partial area.
- the partial area is determined depending on the overlap with previous crossings. It is crucial for this determination of the subsection that the same processing history exists over the entire subsection, ie that the same parameter sets p 0 -p n are present over the entire subsection.
- the current degree of compaction is calculated from the parameter sets p 0 -p n .
- the calculation model M has been determined with the aid of test series.
- the parameters of the individual parameter sets p 0 -p n are connected in the calculation model via a neural network, from which the current degree of compaction can be calculated.
- FIG. 4 is the graphical representation of the degree of compaction of a compacted surface portion 7 a traffic area 5 shown.
- the graphical representation shown the different gray levels indicate a different degree of compaction.
- the operating personnel of the compacting machine are thus informed of the individual degrees of compaction of the surface section to be compacted, so that the compacting machines can be directed to corresponding points which still have a low degree of compaction.
- a partial area may differ from the one in FIG FIG. 1 projected on the asphalt layer projected center of the front drum 17 extend forward in the direction of travel and extend the second part of the surface of the projected onto the layer 3 center of the rear drum in the direction of travel forward.
- the partial surfaces are determined as previously stated, depending on the position of the compacting machine.
- the extension of the partial surface is determined as a function of the dimensions of the compacting machine, in particular as a function of the width of the drum of the compacting machine, so that the width of a partial area corresponds to the width of a drum.
- the compacting machine shown is arranged in front of the front drum 17 and behind the rear drum 19 each have a temperature sensor. Both temperature sensors 20 detect the surface temperature of the layer 3. Due to the distance between the temperature sensors and the applied by the bandages 17 and 19 on the surface of the layer 3 water, which is sprayed during the processing of the layer 3 for cooling on the bandages 17,19 , the surface temperatures of the layer 3 detected by the two temperature sensors 20 are different.
- the for the inventive Layer temperature method used is therefore determined by a fixed weighting ratio between the two temperatures. It is also possible that the weighting of the temperatures for determining the layer temperature is variable, for example as a function of the amount of cooling water applied to the bandages 17 and 19.
- the temperature determination of the surface temperature of the layer 3 via two temperature sensors, which are arranged in front of the front bandage and behind the rear bandage in the direction of travel, is also possible independently of the previously described method according to the invention for determining a degree of compaction of a surface section of a traffic area to be compacted that the method for determining the layer temperature from the weighting of the detected temperatures can also be used in other methods, such as, for example, a stiffness measurement.
Landscapes
- Engineering & Computer Science (AREA)
- Architecture (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Road Paving Machines (AREA)
- Investigation Of Foundation Soil And Reinforcement Of Foundation Soil By Compacting Or Drainage (AREA)
Abstract
Description
Die vorliegende Erfindung betrifft ein Verfahren zur Bestimmung eines Verdichtungsgrades von Schichten aus heißem Material, insbesondere von Asphalt, gemäß Anspruch 1 sowie ein System zur Bestimmung eines Verdichtungsgrades gemäß Anspruch 12 und eine Verdichtungsmaschine nach Anspruch 15.The present invention relates to a method for determining a degree of compaction of layers of hot material, in particular asphalt, according to claim 1 and a system for determining a degree of compaction according to claim 12 and a compacting machine according to
Es ist aktuell im Asphalt-Straßenbau üblich, die Qualität der Asphaltverdichtung über eine Bohrkernentnahme und nachfolgender Laboruntersuchung zu bestimmen. Dabei ist problematisch, dass die Messung nur punktuell und erst nach Beendigung des Verdichtungsprozesses erfolgt. Es kann keine Aussage für die gesamte bearbeitete Fläche erfolgen. Der Verdichtungsprozess wird erst retrospektiv beurteilt und kann nicht während der Bearbeitung angepasst werden.It is currently common in asphalt road construction to determine the quality of the asphalt compaction via a core extraction and subsequent laboratory investigation. It is problematic that the measurement takes place only selectively and only after completion of the compression process. There can be no statement for the entire machined surface. The compaction process is evaluated retrospectively and can not be adjusted during processing.
Auch sind elektronische Sonden, welche von Hand aufgesetzt werden, im Einsatz, die einen punktuellen Verdichtungsgrad ermitteln können. Diese haben den Vorteil, dass man bereits wären der Verdichtungsprozess noch läuft, einzelne Ergebnisse erhält. Jedoch ist auch bei diesem Messverfahren aufgrund der punktuellen Messungen keine Aussage über die gesamte bearbeitete Fläche möglich.Also, electronic probes, which are placed by hand, in use, which can determine a punctual degree of compaction. These have the advantage that one already had the compaction process still running, individual results obtained. However, even with this measurement method due to the punctual measurements no statement about the entire machined surface is possible.
Ferner sind aus dem Erdbau bereits Verfahren zur indirekten Ermittlung des Verdichtungsgrades bekannt. Dort wird aus Beschleunigungs-Signalen der schwingenden Walzenbandage und Untergrund über mathematische Verfahren der Steifigkeitswert während der Verdichtungsfahrt berechnet. Die Ergebnisse werden kartiert und dem Bediener auf einer Anzeigeeinheit unmittelbar visualisiertFurthermore, from the earthworks already known methods for indirect determination of the degree of compaction. There, the stiffness value during acceleration is calculated from acceleration signals of the oscillating roller drum and ground using mathematical methods. The results are mapped and immediately visualized to the operator on a display unit
Um eine flächenhafte Aussage während des Verdichtungsvorganges zu bekommen, werden nach dem oben beschriebenen Verfahren aus dem Erdbau derzeit auch im Asphalteinbau ähnliche Verfahren angewandt, indem versucht wird, die Steifigkeit des Asphalts zu bestimmen. Der damit ermittelte Steifigkeitswert für den verdichteten Asphalt wird jedoch von einer Vielzahl von Faktoren beeinflusst. Zu nennen sind hierbei z. B. ein inhomogener Unterbau, wechselnde Schichtdicken, Flickstellen und die Asphalttemperatur. Auf Grund dieser Einflussfaktoren kann durch eine Steifigkeitsmessung keine hinreichende Aussage über die Qualität der Verdichtungsarbeit erzielt werden. Diese Verfahren sind somit für die Asphaltverdichtung wenig geeignet.In order to obtain an areal statement during the compaction process, similar methods are currently also used in asphalt paving by the method of earthworking described above, by trying to determine the rigidity of the asphalt. However, the resulting stiffness value for the compacted asphalt is influenced by a large number of factors. To name a few are z. B. an inhomogeneous substructure, changing layer thicknesses, patching and the asphalt temperature. Due to these influencing factors, it is not possible to obtain sufficient information about the quality of the compaction work by measuring the stiffness. These methods are thus not very suitable for asphalt compaction.
Daher besteht ein großer Bedarf an einem Verfahren, das es ermöglicht, den Verdichtungsprozess bereits während der Verarbeitung zu optimieren.Therefore, there is a great need for a method that makes it possible to optimize the compaction process already during processing.
Aus der
Nachteilig an diesem Verfahren ist die idealisierte Unterteilung der zu bearbeitenden Bodenfläche in Einheitsflächenabschnitte. Ein typischer Straßenverlauf mit Kurven kann nicht eindeutig auf die vorgeschlagene Weise dargestellt werden. Deshalb kann auch keine eindeutige Bewertung der Verdichtungsarbeit, insbesondere an den Randbereichen der zu verdichtenden Bodenfläche, erfolgen. Ein weiteres Problem ist, dass die Fahrwege der Verdichtungsmaschinen in der Realität nicht geradlinig nebeneinander verlaufen, sondern der Untergrund überlappend bearbeitet werden soll. Insbesondere bei gleichzeitigem Einsatz mehrerer Verdichtungsmaschinen ist eine spurtreue Fahrweise nicht möglich und nicht erwünscht. Daher kann es vorkommen, dass die Einheitsflächenabschnitte von den Verdichtungsmaschinen nur teilweise überfahren werden. Wenn z. B. ein Einheitsflächenabschnitt mehrmals nur auf einer Hälfte überfahren aber als vollständig bearbeitet bewertet wird, erhält der Fahrer die Information, dass die Verdichtungsarbeit für diesen Einheitsflächenabschnitt bereits abgeschlossen ist, obwohl der Einheitsflächenabschnitt im Extremfall zur Hälfte unbearbeitet ist.A disadvantage of this method is the idealized subdivision of the ground surface to be processed in unit surface sections. A typical road with curves can not be clearly represented in the suggested way. Therefore, no unambiguous evaluation of the compaction work, especially at the edge regions of the bottom surface to be compacted, can take place. Another problem is that the paths of the compaction machines in reality do not run straight next to each other, but the surface is to be processed overlapping. In particular, with the simultaneous use of multiple compaction a punctual driving style is not possible and not desirable. Therefore, it may happen that the unit surface sections are only partially crossed by the compaction machines. If z. If, for example, a unit surface section is run over only once in half and evaluated as completely processed, the driver receives the information that the compaction work for this unit surface section has already been completed, even though the unit surface section is half unprocessed in the extreme case.
Es ist daher die Aufgabe der vorliegenden Erfindung, ein Verfahren zur Bestimmung eines Verdichtungsgrades sowie ein System zur Durchführung eines solchen Verfahrens und eine Verdichtungsmaschine bereitzustellen, die unter Vermeidung der zuvor angegebenen Nachteile des Standes der Technik eine genauere Angabe von Verdichtungsgraden einer zu bearbeitenden Fläche ermöglichen.It is therefore the object of the present invention to provide a method for determining a degree of compaction and a system for carrying out such a method and a compacting machine, which allow a more accurate indication of degrees of compaction of a surface to be machined while avoiding the aforementioned disadvantages of the prior art.
Zur Lösung dieser Aufgabe dienen die Merkmale des Anspruchs 1, 12 bzw. 15.To solve this problem serve the features of
Das erfindungsgemäße Verfahren sieht vor, dass zur Bestimmung eines Verdichtungsgrades eines zu verdichtenden Flächenabschnittes einer Verkehrsfläche, wobei der selbstverdichtende Flächenabschnitt eine aufgetragene Schicht eines heißen Materials, insbesondere Asphalt, aufweist und das Material nach dem Auftragen kontinuierlich abkühlt, zunächst die aufgetragene Schicht des zu verdichtenden Flächenabschnittes mit mindestens einer Verdichtungsmaschine überfahren wird. Dabei werden über ein Positionierungssystem Positionsdaten einer Position der Verdichtungsmaschine bestimmt. In Abhängigkeit von der aktuellen Position der Verdichtungsmaschine und zumindest den Abmessungen der Verdichtungsmaschine wird eine aktuelle Teilfläche des Flächenabschnittes der aufgetragenen Schicht bestimmt. Falls die aktuelle Teilfläche teilweise oder ganz auf bereits überfahrenen Teilen des zu verdichtenden Flächenabschnittes liegt, kann die aktuelle Teilfläche auch aus mehreren bereits überfahrenen Unterabschnitten bestehen. Es werden zu der Bestimmung der Verdichtungswirkung geeignete Parameter einer Position der Verdichtungsmaschine gemessen und/oder aufgenommen und zusammen mit den Positionsdaten gespeichert. Die Parameter werden dann der aktuellen Teilfläche oder allen Unterabschnitten der aktuellen Teilfläche zugeordnet. Mit den gespeicherten Parametern wird ein aktueller Verdichtungsgrad für die aktuelle Teilfläche oder jeden Unterabschnitt der aktuellen Teilfläche berechnet. Durch Wiederholen der zuvor genannten Schritte werden eine Vielzahl von Parametern zusammen mit den Positionsdaten gespeichert, die verschiedenen Teilflächen oder Unterabschnitten von Teilflächen zugeordnet sind. Bei der Wiederholung der vorgenannten Schritte sind dann die bei vorangegangenen Überfahrten für die aktuelle zu berechnende Teilfläche oder den zu berechnenden Unterabschnitt der aktuellen Teilfläche gespeicherten Parameter zusammen mit den aktuellen Parametern für die aktuelle Teilfläche oder den zu berechnenden Unterabschnitt der aktuellen Teilfläche die Eingangsparameter für die Berechnung.The method according to the invention provides that to determine a degree of compaction of a surface section of a traffic area to be compacted, wherein the self-compacting surface section has a coated layer of a hot material, in particular asphalt, and the material cools continuously after application, first the applied layer of the surface section to be compacted is run over with at least one compaction machine. In this case, position data of a position of the compacting machine are determined via a positioning system. Depending on the current position of the compacting machine and at least the dimensions of the compacting machine, a current partial area of the surface section of the applied layer is determined. If the current partial surface lies partially or completely on already overrun parts of the surface section to be compacted, the current partial surface can also consist of several subsections already passed over. Suitable parameters for a position of the compaction machine are measured and / or recorded for the determination of the compaction effect and stored together with the position data. The parameters are then assigned to the current face or all subsections of the current face. The stored parameters are used to calculate a current degree of compaction for the current partial area or each subsection of the current partial area. By repeating the aforementioned steps, a plurality of parameters are stored along with the position data associated with different patches or subsections of patches. When repeating the aforementioned steps, the parameters stored during previous passes for the current partial area to be calculated or the subsection of the current partial area to be calculated together with the current parameters for the current partial area or the subsection of the current partial area to be calculated are the input parameters for the calculation ,
Bei der durchgeführten Berechnung werden daher sämtliche zuvor für eine Fläche gespeicherten Parameter zur Berechnung des Verdichtungsgrades verwendet. Somit kann bei der Berechnung des aktuellen Verdichtungsgrades die Historie der Verdichtungsbearbeitung der aktuellen Teilfläche oder des Unterabschnitts der aktuellen Teilfläche berücksichtigt werden, da der aktuelle Verdichtungsgrad stets aus allen gemessenen oder aufgenommenen Rohdaten berechnet werden kann, und nicht partielle Verdichtungszunahmen berechnet werden, die auf eine zuvor berechnete Gesamtverdichtung aufaddiert werden.The calculation thus uses all parameters previously stored for a surface to calculate the degree of compaction. Thus, in the calculation of the current degree of compaction, the history of the compaction processing of the current subarea or the subarea of the current subarea can be taken into account, since the current degree of compaction can always be calculated from all measured or acquired raw data and non-partial compaction gains calculated to one previously calculated calculated total compression are added up.
Wie sich bei Versuchsmessungen herausgestellt hat, entstehen beispielsweise bei der Überfahrt von Asphalt Anomalien, die mit der Annahme eines quasilogarithmischen Verlaufs der Verdichtung über die Anzahl der Überfahrten nicht berücksichtigt werden können. In den Versuchsreihen hat sich herausgestellt, dass bei etwa 30% der Überfahrten anomale Ergebnisse auftreten können, bei denen der Verdichtungsgrad einer Überfahrt im Vergleich zu der vorangegangenen Überfahrt absinkt. Bei der Berechnung des aktuellen Verdichtungsgrades können derartige anomale Ergebnisse jedoch durch die Berücksichtigung der Historie der Verdichtungsarbeit berechnet werden.As has been shown during experimental measurements, for example, when crossing asphalt, anomalies arise that can not be taken into account by assuming a quasi-logarithmic course of the compaction over the number of crossings. In the test series, it has been found that in about 30% of the crossings anomalous results can occur in which the degree of compaction of a crossing decreases in comparison to the previous crossing. When calculating the current degree of compaction, however, such anomalous results can be calculated by considering the history of the compaction work.
Vorzugsweise sind die Größe einer Teilfläche und/oder der Unterabschnitte einer Teilfläche variabel.Preferably, the size of a partial surface and / or the subsections of a partial surface are variable.
Auch kann die Lage der Unterabschnitte in einer Teilfläche variabel sein.Also, the location of the subsections may be variable in a subarea.
Die Größe der Unterabschnitte einer Teilfläche und/oder die Lage eines Unterabschnitts in einer Teilfläche können in Abhängigkeit von der Überschneidung der Teilfläche mit mindestens einer Teilfläche und/oder mindestens eines Unterabschnitts einer Teilfläche einer vorangegangenen Überfahrt bestimmt werden.The size of the subsections of a subarea and / or the position of a subarea in a subarea may be determined as a function of the intersection of the subarea with at least one subarea and / or at least one subarea of a subarea of a preceding crossing.
Die Größe der Unterabschnitte einer Teilfläche und/oder die Lage eines Unterabschnitts in einer Teilfläche kann in Abhängigkeit von einem oder mehreren der Parameter bestimmt werden.The size of the subsections of a subarea and / or the location of a subarea in a subarea may be determined depending on one or more of the parameters.
Durch die variable Einteilung der Teilflächen bzw. Unterabschnitte und die variable Lage der Unterabschnitte in einer Teilfläche ist es möglich, den Verlauf eines zu verdichtenden Flächenabschnitts einer Verkehrsfläche sehr genau darzustellen. Auch ist es möglich, sich überschneidende Fahrwege der Verdichtungsmaschine bzw. von Verdichtungsmaschinen darzustellen und zu berücksichtigen.Due to the variable division of the subareas or subsections and the variable position of the subsections in a subarea, it is possible to represent the course of a surface section of a traffic area to be compacted very precisely. It is also possible to represent and take into account overlapping travel paths of the compacting machine or compaction machines.
Mindestens ein Parameter der aktuellen Teilfläche oder eines Unterabschnittes der aktuellen Teilfläche wird in Abhängigkeit von einem Parameter der aktuellen Teilfläche berechnet.At least one parameter of the current subarea or a subsection of the current subarea is calculated as a function of a parameter of the current subarea.
Die Unterabschnitte werden vorzugsweise in Abhängigkeit der Anzahl der Überfahrten bezüglich Größe und Lage in einer Teilfläche bestimmt. Somit muss die Berechnung des aktuellen Verdichtungsgrades für diesen Unterabschnitt für die aktuelle Überfahrt nur einmalig berechnet werden, da über den gesamten Unterabschnitt gleichbleibende Parameter gespeichert sind. Dadurch muss für eine aktuelle Teilfläche nur für jeden Unterabschnitt der aktuellen Teilfläche eine Berechnung durchgeführt werden, so dass eine geringe Anzahl von Berechnungen durchgeführt werden muss. Für den Fall, dass eine Teilfläche keine Unterabschnitte aufweist, nämlich dann wenn eine aktuelle Teilfläche deckungsgleich mit einer Teilfläche einer vorangegangenen Überfahrt ist, muss für diese Teilfläche nur eine Berechnung des Verdichtungsgrades durchgeführt werden.The subsections are preferably determined as a function of the number of crossings with regard to size and position in a subarea. Thus, the calculation of the current degree of compaction for this subsection for the current crossing need only be calculated once, since consistent parameters are stored over the entire subsection. As a result, a calculation must be carried out for a current partial area only for each subsection of the current partial area, so that a small number of calculations must be carried out. In the event that a subarea has no subsections, namely when a current subarea is congruent with a subarea of a previous crossing, only a calculation of the degree of compaction must be performed for this subarea.
Daher ermöglicht die zuvor genannte Bestimmung der Teilflächen und Unterabschnitte ein effizientes und schnelles Berechnen des Verdichtungsgrades.Therefore, the aforementioned determination of the sub-areas and subsections enables an efficient and fast calculation of the degree of compaction.
Die Parameter, über die der aktuelle Verdichtungsgrad berechnet wird, können die Anzahl der Überfahrten, die Schichttemperatur, die Geschwindigkeit der Verdichtungsmaschine, die Frequenz der Bandage, die Amplitude der Bandage, der Typ der Verdichtungsmaschine, die Masse der Verdichtungsmaschine, das Abkühlverhalten der Schicht, die Verdichtungsart, die Zusammensetzung der Schicht und/oder der Lenkeinschlag der Verdichtungsmaschine sein.The parameters used to calculate the current degree of compaction may include the number of crossings, the layer temperature, the speed of the compaction machine, the frequency of the bandage, the amplitude of the bandage, the type of compacting machine, the mass of the compacting machine, the cooling behavior of the layer, the compression type, the composition of the layer and / or the steering angle of the compacting machine.
Ferner ist es vorteilhafterweise vorgesehen, dass ein mindestens weiterer Parameter als fester Parameter zu Beginn des Verfahrens vorgegeben wird. Ein derartiger Parameter kann beispielsweise die Asphaltmischung, das Gewicht der Verdichtungsmaschine, oder der Verdichtungstyp sein.Furthermore, it is advantageously provided that an at least further parameter is specified as a fixed parameter at the beginning of the method. Such a parameter may be, for example, the asphalt mixture, the weight of the compaction machine, or the compaction type.
Selbstverständlich ist es möglich, den festen Parameter während der Durchführung des Verfahrens zu verändern. Wenn als fester Parameter beispielsweise als Verdichtungsart Vibration vorgegeben wird, kann nach der Überfahrt eines Bereiches des Flächenabschnittes dieser Parameter beispielsweise auf Oszillation oder statisch umgestellt werden, wenn die Verdichtungsmaschine im Fortgang des Verfahrens auf diese Weise verdichtet.Of course, it is possible to change the fixed parameter while performing the method. If vibration is specified as a fixed parameter, for example as a compression mode, after passing over a region of the surface section, this parameter can be changed to oscillation or static, for example, if the compacting machine compacts in this way in the course of the process.
In einer bevorzugten Ausführungsform ist vorgesehen, dass mindestens ein gespeicherter Parameter einer Teilfläche oder eines Unterabschnittes einer vorangegangenen Überfahrt in Abhängigkeit von einem Parameter darstellenden Teilfläche und/oder einer Zeitkomponente korrigiert wird.In a preferred embodiment, it is provided that at least one stored parameter of a partial area or of a subsection of a preceding crossing is corrected as a function of a partial area representing a parameter and / or a time component.
Auf diese Weise ist es möglich, beispielsweise den gespeicherten Parameter des Abkühlverhaltens einer Teilfläche kontinuierlich mit Erkenntnissen aus den aktuellen Messungen über das Abkühlverhalten oder auch über die zeitliche Veränderung des Abkühlverhaltens zu korrigieren. Dadurch ist es möglich, eine sehr genaue Berechnung des Verdichtungsgrades durchzuführen. Auch ist es möglich, mindestens einen Parameter der aktuellen Teilfläche oder eines Unterabschnittes in Abhängigkeit von einem Parameter der aktuellen Teilfläche zu berechnen. So kann beispielsweise der Parameter des Abkühlverhaltens aus dem Parameter der Schichttemperatur in Verbindung mit der Schichttemperatur der vorangegangenen Überfahrt bestimmt werden.In this way it is possible, for example, to continuously correct the stored parameter of the cooling behavior of a partial area with findings from the current measurements on the cooling behavior or else about the temporal change of the cooling behavior. This makes it possible to perform a very accurate calculation of the degree of compaction. It is also possible to calculate at least one parameter of the current subarea or of a subsection as a function of a parameter of the current subarea. For example, the parameter of the cooling behavior can be determined from the parameter of Layer temperature can be determined in conjunction with the layer temperature of the previous crossing.
In einer bevorzugten Weiterbildung der Erfindung ist vorgesehen, dass Bearbeitungsprioritäten für eine Teilfläche und/oder einen Unterabschnitt einer Teilfläche berechnet werden.In a preferred embodiment of the invention, it is provided that machining priorities for a partial area and / or a subsection of a partial area are calculated.
Dabei kann die Priorität aus dem aktuellen Verdichtungsgrad, der Anzahl der Überfahrten, einer Zeitkomponente, und/oder einzelnen Parametern, wie beispielsweise dem Abkühlverhalten einer Schicht, berechnet werden.In this case, the priority can be calculated from the current degree of compaction, the number of crossings, a time component, and / or individual parameters, such as the cooling behavior of a layer.
Über die Bearbeitungspriorität kann bestimmt werden, welche Teilfläche oder welcher Unterabschnitt einer Teilfläche als nächstes bearbeitet werden muss, um einen guten Verdichtungsgrad zu gewährleisten. Droht beispielsweise für eine Teilfläche und/oder einen Unterabschnitt einer Teilfläche des zu verdichtenden Flächenabschnittes die Temperatur für eine Bearbeitung zu niedrig zu werden, ist die berechnete Überfahrtpriorität für diesen Bereich sehr hoch, so dass beurteilt werden kann, dass dieser Bereich als nächstes bearbeitet werden muss.The processing priority can be used to determine which subarea or subsection of a subarea must be processed next to ensure a good degree of compaction. If, for example, the temperature for processing becomes too low for a partial area and / or a lower portion of a partial area of the area section to be compacted, the calculated crossing priority for this area is very high, so that it can be judged that this area must be processed next ,
Die Erfindung sieht in vorteilhafter Weise vor, dass in einem nächsten Schritt der Flächenabschnitt grafisch dargestellt wird, wobei der aktuelle Verdichtungsgrad, einzelne Parameter und/oder die Bearbeitungspriorität für jede Teilfläche und/oder für jeden Unterabschnitt einer Teilfläche dargestellt sind. Die grafische Darstellung der genannten Informationen ermöglicht es den Bedienpersonen einer Verdichtungsmaschine, die Verdichtungsmaschine so zu steuern, dass ein optimales Bearbeitungsergebnis für das zu verdichtenden Flächenabschnittes entsteht.The invention advantageously provides that, in a next step, the area section is displayed graphically, wherein the current degree of compaction, individual parameters and / or the processing priority are shown for each partial area and / or for each subsection of a partial area. The graphical representation of the information mentioned allows the operators of a compaction machine to control the compaction machine so that an optimal processing result for the area to be compacted arises.
Es kann ferner vorgesehen sein, dass in einem weiteren Verfahrensschritt aus den aktuellen Positionsdaten und den Positionsdaten der Teilflächen und/oder Unterabschnitten einer Teilfläche mit den höchsten Bearbeitungsprioritäten Navigationsdaten berechnet und angezeigt werden können. Auf diese Weise ist es möglich, der Bedienperson einer Verdichtungsmaschine beispielsweise die Entfernung und Richtung zu den Bereichen des zu verdichtenden Flächenabschnittes anzuzeigen, die zeitnah bearbeitet werden müssen. Dabei kann die Berechnung der Navigationsdaten auch eine Zeitkomponente sowie die Geschwindigkeit der Verdichtungsmaschine berücksichtigen, so dass eine in Abhängigkeit von den Bearbeitungsprioritäten optimale Route berechnet und angezeigt werden kann.It may further be provided that, in a further method step, navigation data is derived from the current position data and the position data of the subareas and / or subsections of a subarea with the highest processing priorities can be calculated and displayed. In this way, it is possible to indicate to the operator of a compaction machine, for example, the distance and direction to the areas of the area to be compacted, which must be processed in a timely manner. In this case, the calculation of the navigation data can also take into account a time component as well as the speed of the compacting machine, so that a route which is optimal as a function of the processing priorities can be calculated and displayed.
Die Erfindung sieht ferner in vorteilhafter Weise vor, dass Daten, vorzugsweise die gemessenen bzw. aufgenommenen Parameter mit Positionsdaten, an mindestens eine weitere Verdichtungsmaschine und/oder eine zentrale Rechnereinheit übermittelt werden, so dass in einem Netzwerk von mehreren Verdichtungsmaschinen allen Verdichtungsmaschinen die Daten der jeweils anderen Verdichtungsmaschinen zur Verfügung stehen. Somit können bei der Berechnung des aktuellen Verdichtungsgrades nicht nur die Überfahrt einer Verdichtungsmaschine, sondern die Überfahrt sämtlicher Verdichtungsmaschinen berücksichtigt werden. Auf diese Weise können mehrere Verdichtungsmaschinen im Verbund arbeiten und der aktuelle Verdichtungsgrad des interessierenden Bereiches des zu verdichtenden Flächenabschnittes kann unter Berücksichtigung der Verdichtungsarbeit aller Maschinen berechnet werden.The invention further advantageously provides that data, preferably the measured or recorded parameters with position data, are transmitted to at least one further compacting machine and / or a central computer unit, so that in a network of several compacting machines all the compacting machines receive the data of each other compaction machines are available. Thus, not only the crossing of a compaction machine, but the passage of all compaction machines can be considered in the calculation of the current degree of compaction. In this way, several compaction machines can work in the composite and the current degree of compaction of the region of interest of the area to be compacted section can be calculated taking into account the compaction work of all machines.
Die Erfindung sieht ferner ein System zur Durchführung des zuvor beschriebenen Verfahrens vor. Das System sieht vorzugsweise vor, dass das Positionierungssystem ein Positionsdatenempfänger zum Empfang von satellitengestützten Positionsdaten umfasst.The invention further provides a system for carrying out the method described above. The system preferably provides that the positioning system comprises a position data receiver for receiving satellite-based position data.
Alternativ oder zusätzlich kann das Positionierungssystem ein optisches Positionsbestimmungssystem, vorzugsweise ein Laserpositionierungssystem, umfassen.Alternatively or additionally, the positioning system may comprise an optical positioning system, preferably a laser positioning system.
Auf diese Weise ist es möglich, die Position der Verdichtungsmaschine sehr genau und einfach zu bestimmen. Mit einem optischen Positionierungssystem ist es auch möglich, die Position der Verdichtungsmaschine zu bestimmen, wenn eine satellitengestützte Positionsbestimmung nicht möglich ist, wie beispielsweise in einem Tunnel.In this way it is possible to determine the position of the compacting machine very accurately and easily. With an optical positioning system it is also possible to determine the position of the compaction machine when satellite-based position determination is not possible, such as in a tunnel.
Ferner sieht die Erfindung eine Verdichtungsmaschine mit dem zuvor genannten System vor.Furthermore, the invention provides a compacting machine with the aforementioned system.
Die Verdichtungsmaschine weist mindestens zwei Temperatursensoren zur Messung der Temperatur der aufgetragenen Schicht auf, wobei der Parameter der Schichttemperatur aus den mit den Sensoren gemessenen Temperaturen berechnet wird.The compaction machine has at least two temperature sensors for measuring the temperature of the applied layer, the parameter of the layer temperature being calculated from the temperatures measured with the sensors.
In Fahrtrichtung der Verdichtungsmaschine gesehen ist einer der Temperatursensoren vor der vorderen Achse und einer der Temperatursensoren hinter der hinteren Achse der Verdichtungsmaschine angeordnet.As viewed in the direction of travel of the compacting machine, one of the temperature sensors is arranged in front of the front axle and one of the temperature sensors behind the rear axle of the compacting machine.
Der Parameter der Schichttemperatur wird durch Gewichtung der gemessenen Temperaturen berechnet.The parameter of the layer temperature is calculated by weighting the measured temperatures.
Im Folgenden wird unter Bezugnahme auf die Figuren ein Ausführungsbeispiel der Erfindung näher erläutert.In the following an embodiment of the invention will be explained in more detail with reference to the figures.
Es zeigen:
-
Fig. 1 eine schematische Darstellung einer Verdichtungsmaschine, -
Fig. 2 eine schematische Darstellung eines zu verdichtenden Flächenabschnittes einer Verkehrsfläche, -
Fig. 3 eine Diagrammdarstellung der Berechnung des aktuellen Verdichtungsgrades und -
Fig. 4 eine beispielhafte Darstellung des Verdichtungsgrades eines zu verdichtenden Flächenabschnittes einer Verkehrsfläche.
-
Fig. 1 a schematic representation of a compacting machine, -
Fig. 2 a schematic representation of a surface portion to be compacted a traffic area, -
Fig. 3 a diagram of the calculation of the current degree of compaction and -
Fig. 4 an exemplary representation of the degree of compaction of a compacting surface section of a traffic area.
Die Verdichtungsmaschine 1 weist einen Positionsdatenempfänger 21 eines Positionnierungssystems auf, beispielsweise einen GPS-Empfänger. Über das Positionsbestimmungssystem kann die Position der Verdichtungsmaschine bestimmt werden. Über weitere nicht dargestellten Sensoren können die Geschwindigkeit der Verdichtungsmaschine, die Frequenz der Bandage, die Amplitude der Bandage und der Lenkeinschlag der Verdichtungsmaschine bestimmt werden. Für das erfindungsgemäße Verfahren können ferner die Anzahl der Überfahrten registriert werden, sowie der Typ der Verdichtungsmaschine, die Masse der Verdichtungsmaschine, die Verdichtungsart und die Zusammensetzung der Schicht vorgegeben werden.The compaction machine 1 has a
Bei der Durchführung des erfindungsgemäßen Verfahrens wird zunächst die aufgetragene Schicht 3 des verdichtenden Flächenabschnittes 7 mit der Verdichtungsmaschine 1 überfahren.When carrying out the method according to the invention, the applied
Über den Positionsdatenempfänger 21 des Positionsbestimmungssystems wird die Position der Verdichtungsmaschine 1 bestimmt. Dabei empfängt der Positionsdatenempfänger 21 von Satelliten Positionsdaten, die in eine Position umgerechnet werden können. Alternativ oder zusätzlich kann die Verdichtungsmaschine 1 ein optisches Positionierungssystem, beispielsweise ein Laserpositionierungssystem umfassen, was beispielsweise bei einer Tunneldurchfahrt, in der eine Positionsbestimmung über das satellitengestützte Positionsbestimmungssystem nicht möglich ist, die Positionsbestimmung ermöglichen kann.The position of the compaction machine 1 is determined via the
In
Über die Schichttemperatur kann durch Bestimmung der Temperaturdifferenz der aktuellen Schichttemperatur mit einer Schichttemperatur einer vorangegangenen Überfahrt das Abkühlverhalten der Schicht bestimmt werden. Es ist aber auch möglich, über entsprechende Sensoren Wetterdaten, wie beispielsweise die Außentemperatur, die Windgeschwindigkeit, den Luftdruck und die Luftfeuchtigkeit zu messen, um über diese Wetterdaten das Abkühlverhalten der Schicht zu berechnen. Wie zuvor erwähnt worden ist, können in dem erfindungsgemäßen Verfahren der Typ der Verdichtungsmaschine, die Masse der Verdichtungsmaschine, die Verdichtungsart und die Zusammensetzung der Schicht als feste Parameter vorgegeben werden.By way of the layer temperature, the cooling behavior of the layer can be determined by determining the temperature difference of the current layer temperature with a layer temperature of a preceding crossing. However, it is also possible to use appropriate sensors to measure weather data, such as the outside temperature, the wind speed, the air pressure and the humidity, in order to calculate the cooling behavior of the layer via these weather data. As mentioned above, in the method according to the invention, the type of compacting machine, the mass of the compacting machine, the type of compaction and the composition of the layer can be specified as fixed parameters.
Im Fortgang des Verfahrens werden die Parameter der Teilfläche 9 zugeordnet. Dabei ist es nicht zwangsweise notwendig, dass die fest vorgegebenen Parameter ebenfalls der Teilfläche zugeordnet werden, sofern angenommen wird, dass diese Parameter für den gesamten zu verdichtenden Flächenabschnitt gültig sind.In the course of the process, the parameters of the
Aus allen Parametern wird für die aktuelle Teilfläche 9 der Verdichtungsgrad berechnet.From all parameters, the degree of compaction is calculated for the current
In
Danach wird für die Teilfläche 9' der Verdichtungsgrad berechnet. Da gemäß des erfindungsgemäßen Verfahrens bei der Berechnung des Verdichtungsgrades alle zuvor für den Bereich einer Teilfläche oder eines Unterabschnittes gespeicherten Parameter in die Berechnung mit einfließen, muss zur Berechnung des Verdichtungsgrades der Teilfläche 9' für jeden Unterabschnitt 13a, 13b eine Berechnung durchgeführt werden. Bei der Berechnung des Verdichtungsgrades des Unterabschnittes 13a werden die Parameter der Überfahrt n+1 sowie die Parameter der Überfahrt n herangezogen, da der Unterabschnitt 13a auf der Teilfläche 9 der Überfahrt n liegt. In dem dargestellten Beispiel werden für den Unterabschnitt 13b nur die für die Überfahrt n+1 an der Position 11' gemessen bzw. aufgenommenen Parameter bei der Berechnung des Verdichtungsgrades verwendet. Für den Fall, dass unterhalb des Unterabschnittes 13b sich Teilflächen oder Unterabschnitte von vorangegangenen Überfahrt befinden, so wird der Unterabschnitt 13b entsprechend den Grenzen der Teilflächen bzw. Unterabschnitte der vorangegangenen Überfahrten aufgeteilt, so dass die Teilfläche 9' aus mehr als zwei Unterabschnitten besteht. Für jeden der Unterabschnitte wird dementsprechend dann ein Verdichtungsgrad berechnet.Thereafter, the degree of compaction is calculated for the partial surface 9 '. According to the method according to the invention, in the calculation of the degree of compaction, all parameters previously stored for the area of a subarea or subsection are included in the calculation, a computation must be carried out for each
Auf diese Weise wird bei der Wiederholung der verfahrensgemäßen Überfahrten der gesamte zu verdichtende Flächenabschnitt in mit der Verdichtungsmaschine mitwandernde Teilflächen untergeteilt, wobei die Größen und Lage der Teilflächen variabel ist. Durch die Überlappung der Fahrwege der Verdichtungsmaschine werden die aktuellen Teilflächen in kleiner werdende Unterabschnitte aufgeteilt, so dass eine sehr genaue Berechnung des Verdichtungsgrades des zu verdichtenden Flächenabschnittes durchgeführt werden kann.In this way, during the repetition of the process-related passages, the entire surface section to be compacted is subdivided into partial surfaces co-migrating with the compacting machine, wherein the sizes and position of the partial surfaces are variable. As a result of the overlapping of the travel paths of the compacting machine, the current subareas are subdivided into smaller subsections, so that a very accurate calculation of the degree of compaction of the area section to be compacted can be carried out.
Bei dem zuvor beschriebenen Verfahren ist es möglich, dass ein bereits gespeicherter Parameter für eine Teilfläche, beispielsweise die Teilfläche n in Abhängigkeit von einem Parameter der aktuellen Teilfläche, beispielsweise Teilfläche 9', und/oder einer Zeitkomponente korrigiert wird. Beispielsweise kann dieser Parameter das Abkühlverhalten der Schicht sein. Ergibt beispielsweise der Parameter des Abkühlverhaltens der Schicht bei der Überfahrt n+1, dass das zuvor für die Teilfläche 9 bei der Überfahrt n gespeicherte Abkühlverhalten der Schicht und aufgrund des Zeitabstandes zwischen der Überfahrt n+1 zu der Überfahrt n und/oder aufgrund von wechselnden Wetterbedingungen nicht mehr der Realität entsprechen kann, so kann dieser für die Teilfläche 9 gespeicherte Parameter entsprechen korrigiert werden. Auch ist es möglich, anstelle der Korrektur des gespeicherten Parameters einen mit einem entsprechend versehenen Zeitstempel neuen Parameter für die Teilfläche 9 zu speichern.In the method described above, it is possible for an already stored parameter for a subarea, for example the subarea n, to be corrected as a function of a parameter of the current subarea, for example subarea 9 ', and / or a time component. For example, this parameter can be the cooling behavior of the layer. If, for example, the parameter of the cooling behavior of the layer at the crossing n + 1 yields that the cooling behavior of the layer previously stored for the
Auf diese Weise ist es möglich, die Historie der Bearbeitung und Abkühlung eines Flächenabschnittes sehr genau zu speichern, so dass eine sehr gute Temperaturprognose für den zu verdichtenden Flächenabschnitt erstellt werden kann.In this way, it is possible to store the history of the processing and cooling of a surface section very accurately, so that a very good temperature forecast for the surface section to be compacted can be created.
Da heißer Asphalt nur bis zu einer bestimmten Temperatur verdichtet werden kann und die Verdichtung unterhalb dieser Temperatur nicht mehr effektiv möglich ist, kann mit Hilfe der Temperaturprognose bzw. mit Hilfe des Abkühlverhaltens der Schicht eine Bearbeitungspriorität für eine Teilfläche und/oder einen Unterabschnitt einer Teilfläche berechnet werden.Since hot asphalt can only be compacted to a certain temperature and compression below this temperature is no longer effectively possible, a processing priority for a partial area and / or a subsection of a partial area can be calculated with the aid of the temperature prognosis or with the aid of the cooling behavior of the layer become.
Das erfindungsgemäße Verfahren sieht weiter vor, dass der zu bearbeitende Flächenabschnitt der Verkehrsfläche visualisiert wird. So wird der Flächenabschnitt grafisch dargestellt, wobei der aktuelle Verdichtungsgrad, einzelne Parameter und/oder die Bearbeitungspriorität für jede Teilfläche und/oder für jeden Unterabschnitt einer Teilfläche dargestellt sind. Bei der Darstellung der Bearbeitungspriorität werden die einzelnen Teilflächen und/oder die Unterabschnitte entsprechend ihrer Priorität farbig dargestellt. Beispielsweise ist es möglich, die Teilflächen und/oder Unterabschnitte mit der höchsten Bearbeitungspriorität mit einer Warnfarbe, beispielsweise rot, oder blinkend, darzustellen, so dass die Bedienperson einer Verdichtungsmaschine sofort die Bereiche erkennt, die als nächstes bearbeitet werden müssen, um ein gutes Verdichtungsergebnis zu erhalten. Bei dem erfindungsgemäßen Verfahren ist es ferner möglich, dass anhand der aktuellen Positionsdaten und den Positionsdaten der Teilflächen und/oder Unterabschnitten einer Teilfläche mit sehr hohen Bearbeitungsprioritäten, Navigationsdaten berechnet werden, die der Bedienperson der Maschine beispielsweise in Form von Entfernung und Richtung angezeigt werden. Dabei ist es möglich, dass aus den Navigationsdaten eine Route berechnet wird, die den optimalen Weg zur Bearbeitung der Teilflächen bzw. Unterabschnitte mit den höchsten Bearbeitungsprioritäten anzeigt. Auf diese Weise ist ein sehr effektives Bearbeiten mit einem sehr guten Verdichtungsergebnis möglich.The method according to the invention further provides that the surface section of the traffic area to be processed is visualized. Thus, the area section is graphically represented, wherein the current degree of compaction, individual parameters and / or the processing priority for each sub-area and / or for each subsection of a sub-area are shown. In the representation of the processing priority, the individual sub-areas and / or the sub-sections are corresponding their priority in color. For example, it is possible to display the highest-priority sub-areas and / or sub-sections with a warning color, such as red, or blinking, so that the operator of a compacting machine immediately recognizes the areas to be processed next to obtain a good compaction result receive. In the method according to the invention, it is also possible that, based on the current position data and the position data of the subareas and / or subsections of a subarea with very high processing priorities, navigation data are calculated, which are displayed to the operator of the machine, for example in the form of distance and direction. It is possible that a route is calculated from the navigation data, indicating the optimal path for processing the sub-areas or sub-sections with the highest processing priorities. In this way, a very effective editing with a very good compression result is possible.
Um den verdichtenden Flächenabschnitt mit mehreren Verdichtungsmaschinen bearbeiten zu können, ist es vorgesehen, dass die einzelnen Verdichtungsmaschinen ihre gemessenen bzw. aufgenommenen Daten und die dazugehörigen Positionsdaten an die anderen Verdichtungsmaschinen, beispielsweise per Funk, übermitteln, so dass allen Verdichtungsmaschinen die Daten der jeweils anderen Verdichtungsmaschinen ebenfalls zur Verfügung stehen. Auch ist es möglich, dass die Verdichtungsmaschinen die Daten an eine zentrale Recheneinheit übermitteln, die eine entsprechende Verteilung der Daten an die weiteren Verdichtungsmaschinen vornimmt. Bei einem derartigen Netzwerk mit mehreren Verdichtungsmaschinen ist es möglich, dass jede Maschine für sich aus den zur Verfügung stehenden Daten die entsprechenden Verdichtungsgrade sowie Prioritäten berechnet. Auch ist es möglich, dass die Daten in der zentralen Recheneinheit gesammelt werden und dort entsprechend die Berechnungen durchgeführt werden. Die Ergebnisse werden danach zur visuellen Darstellung als Anzeige für das Bedienpersonal an die Verdichtungsmaschinen gesendet.In order to be able to process the compacting surface section with a plurality of compacting machines, it is provided that the individual compacting machines transmit their measured or recorded data and the associated position data to the other compacting machines, for example by radio, so that all the compacting machines receive the data of the other compacting machines also available. It is also possible for the compaction machines to transmit the data to a central processing unit which makes a corresponding distribution of the data to the further compaction machines. In such a network with multiple compaction machines, it is possible for each machine to calculate the respective compaction levels and priorities on the basis of the available data. It is also possible for the data to be collected in the central processing unit and for the calculations to be carried out accordingly. The results are then sent to the compaction machines for visual display as an indication to the operator.
In
In
Wie in der Darstellung von
Anhand der unterschiedlichen Färbungen wird somit dem Bedienpersonal der Verdichtungsmaschine die einzelnen Verdichtungsgrade des zu verdichtenden Flächenabschnittes angezeigt, so dass die Verdichtungsmaschinen an entsprechende Stellen gelenkt werden können, die einen noch zu geringen Verdichtungsgrad aufweisen.On the basis of the different colorations, the operating personnel of the compacting machine are thus informed of the individual degrees of compaction of the surface section to be compacted, so that the compacting machines can be directed to corresponding points which still have a low degree of compaction.
Bei dem erfindungsgemäßen Verfahren ist es beispielsweise auch möglich, für eine Position der Verdichtungsmaschine zwei Parametersätze zu messen bzw. aufzunehmen und diese zwei Teilflächen zuzuweisen. Beispielsweise kann eine Teilfläche sich von der in
Die Teilflächen werden wie zuvor ausgeführt, in Abhängigkeit von der Position der Verdichtungsmaschine festgelegt. Die Erstreckung der Teilfläche wird dabei in Abhängigkeit von den Abmessungen der Verdichtungsmaschine, insbesondere in Abhängigkeit von der Breite der Bandage der Verdichtungsmaschine, festgelegt, so dass die Breite einer Teilfläche der Breite einer Bandage entspricht.The partial surfaces are determined as previously stated, depending on the position of the compacting machine. The extension of the partial surface is determined as a function of the dimensions of the compacting machine, in particular as a function of the width of the drum of the compacting machine, so that the width of a partial area corresponds to the width of a drum.
Selbstverständlich ist es auch möglich, das erfindungsgemäße Verfahren mit Verdichtungsmaschinen mit nur einer Bandage durchzuführen.Of course, it is also possible to carry out the method according to the invention with compacting machines with only one bandage.
Bei der in
Claims (15)
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102007019419A DE102007019419A1 (en) | 2007-04-23 | 2007-04-23 | Method for determining a degree of compaction of asphalts and system for determining a degree of compaction |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1985761A2 true EP1985761A2 (en) | 2008-10-29 |
| EP1985761A3 EP1985761A3 (en) | 2012-08-29 |
| EP1985761B1 EP1985761B1 (en) | 2013-12-11 |
Family
ID=39590550
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP08154648.3A Revoked EP1985761B1 (en) | 2007-04-23 | 2008-04-16 | Method for determining the degree of compaction of asphalt and compacting machine as well as system for determining degree of compaction |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7873492B2 (en) |
| EP (1) | EP1985761B1 (en) |
| JP (1) | JP5137669B2 (en) |
| DE (1) | DE102007019419A1 (en) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013174458A1 (en) * | 2012-05-22 | 2013-11-28 | Hamm Ag | Method for planning and carrying out ground-compaction operations, in particular for asphalt compaction |
| EP3447191A1 (en) | 2017-08-24 | 2019-02-27 | MOBA - Mobile Automation AG | Method and device for compaction control |
| EP3992364A1 (en) * | 2020-11-03 | 2022-05-04 | Hamm AG | Method for compacting asphalt material |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2366831B1 (en) * | 2010-03-18 | 2014-12-24 | Joseph Vögele AG | Method for controlling the process of applying a layer of road paving material and paver |
| PL2366830T3 (en) * | 2010-03-18 | 2016-11-30 | Method and system for applying a street pavement | |
| DE102011104269A1 (en) | 2011-06-15 | 2012-12-20 | Wacker Neuson Produktion GmbH & Co. KG | Guide bar with energy storage |
| EP2844798A4 (en) * | 2012-04-06 | 2016-08-24 | Univ Oklahoma | Method and apparatus for determining stiffness of a roadway |
| US9169605B2 (en) * | 2013-05-23 | 2015-10-27 | Caterpillar Inc. | System and method for determining a state of compaction |
| JP2015108231A (en) * | 2013-12-04 | 2015-06-11 | 道路工業株式会社 | Automatic texture monitoring system |
| US20150211199A1 (en) * | 2014-01-24 | 2015-07-30 | Caterpillar Inc. | Device and process to measure ground stiffness from compactors |
| DE102014203585A1 (en) * | 2014-02-27 | 2015-08-27 | Hamm Ag | Method for determining a slip state of the compactor roller of a soil compactor caused by an oscillatory movement of a compactor roller |
| US9534995B2 (en) * | 2014-06-11 | 2017-01-03 | Caterpillar Paving Products Inc. | System and method for determining a modulus of resilience |
| CN104153278A (en) * | 2014-08-01 | 2014-11-19 | 中联重科股份有限公司 | Material identification device, method and system, road building machine and mode selection method |
| EP2982951B1 (en) | 2014-08-05 | 2018-10-10 | Joseph Vögele AG | Thermography module for road finishers |
| EP2990531A1 (en) | 2014-08-27 | 2016-03-02 | Joseph Vögele AG | System for road finisher with a temperature measuring device, method for determining a cooling behaviour und computer-readable storage medium |
| US9476168B2 (en) | 2014-08-29 | 2016-10-25 | Caterpillar Paving Products Inc. | Asphalt paver temperature alert system for asphalt compactor operator |
| US20160076205A1 (en) * | 2014-09-16 | 2016-03-17 | Caterpillar Paving Products Inc. | Device and Process for Controlling Compaction Based on Previously Mapped Data |
| US9423332B2 (en) * | 2014-10-14 | 2016-08-23 | Caterpillar Inc. | System and method for validating compaction of a work site |
| US9367042B2 (en) | 2014-10-21 | 2016-06-14 | Caterpillar Paving Products, Inc. | Machine alert when stopping on hot asphalt |
| JP6297968B2 (en) * | 2014-12-25 | 2018-03-20 | 日立建機株式会社 | Compaction machine evaluation equipment |
| US9587361B2 (en) | 2015-04-08 | 2017-03-07 | Caterpillar Paving Products Inc. | Temperature dependent auto adaptive compaction |
| SE539312C2 (en) * | 2015-06-10 | 2017-06-27 | Conny Andersson Med Firma Ca Konsult | A method of determining the quality of a newly produced asphalt pavement |
| CN105445445B (en) * | 2015-11-18 | 2017-06-23 | 北京市政路桥建材集团有限公司 | A kind of Cold Recycled Mixture with Emulsified Asphalt multistage construction control method |
| DE102015122161A1 (en) * | 2015-12-18 | 2017-06-22 | Hamm Ag | Soil compactors and method for compacting underground |
| US9856612B2 (en) | 2015-12-21 | 2018-01-02 | Caterpillar Paving Products Inc. | Compaction measurement using nearby sensors |
| DE102016207584B3 (en) * | 2016-05-03 | 2017-06-01 | Moba Mobile Automation Ag | DEVICE AND METHOD FOR DETERMINING THE TEMPERATURE OF A ROAD TREE MATERIAL RAISED BY A CONSTRUCTION MACHINE AND A CONSTRUCTION MACHINE WITH SUCH A DEVICE |
| DE102016007166A1 (en) | 2016-06-13 | 2017-12-14 | Bomag Gmbh | Roller for asphalt compaction, in particular rubber wheel roller, and method for spraying a rubber wheel of a roller for asphalt compaction |
| DE102017008602A1 (en) * | 2017-09-13 | 2019-03-14 | Bomag Gmbh | Method for monitoring the compaction process in road construction and road roller |
| US10640943B2 (en) | 2017-12-14 | 2020-05-05 | Caterpillar Paving Products Inc. | System and method for compacting a worksite surface |
| US10787198B2 (en) * | 2018-10-15 | 2020-09-29 | Caterpillar Paving Products Inc. | Controlling compactor turning radius |
| DE102019107219A1 (en) * | 2019-03-21 | 2020-09-24 | Wacker Neuson Produktion GmbH & Co. KG | Soil compacting device for compacting a soil area |
| US20230139560A1 (en) * | 2021-11-01 | 2023-05-04 | Caterpillar Paving Products Inc. | Paving material segregation detection and monitoring |
| CN114197274A (en) * | 2022-01-21 | 2022-03-18 | 山推工程机械股份有限公司 | Detection device |
| US20230287638A1 (en) * | 2022-03-09 | 2023-09-14 | Caterpillar Paving Products Inc. | Systems and methods for estimating material compaction based on electric motor drive power |
| DE102023106491A1 (en) * | 2023-03-15 | 2024-09-19 | Wacker Neuson Produktion GmbH & Co. KG | System and method for guiding an operator during soil compaction with a soil compaction device |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0698152A1 (en) | 1993-04-29 | 1996-02-28 | Geodynamik H Thurner AB | Compaction index |
| EP1705293A1 (en) | 2005-03-23 | 2006-09-27 | Ammann Aufbereitung AG | Method and device for compacting an area of ground |
Family Cites Families (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| SE455002B (en) * | 1984-05-08 | 1988-06-13 | Nilsson Peter | METHOD DEVICE FOR SEATING THE PROCESSING SIZE IN BUILDING MATERIAL FOR DAMAGE AND WALL BUILDING DAMAGES |
| SE445566B (en) * | 1984-11-19 | 1986-06-30 | Thurner Geodynamik Ab | PROCEDURE FOR ESTIMATING THE PACKING RATE OPENED BY PACKAGING AND DEVICE TO META PACKING RATE FOR THE IMPLEMENTATION OF THE PROCEDURE |
| US5123778A (en) * | 1990-09-26 | 1992-06-23 | Bohnhoff William W | Method of paving |
| DE69222207T2 (en) * | 1991-03-13 | 1998-03-05 | Westinghouse Electric Corp | Method of determining the amount of deformation in a material in response to a compressive force |
| JP2565920Y2 (en) * | 1991-07-03 | 1998-03-25 | 日本鋪道株式会社 | Compaction degree measuring device |
| DE4124193A1 (en) * | 1991-07-20 | 1993-01-21 | Wacker Werke Kg | METHOD FOR DETECTING AND DISPLAYING THE GROUND DENSITY REACHED WHEN WORKING WITH A GROUND COMPRESSOR |
| US5426972A (en) * | 1993-04-20 | 1995-06-27 | Gas Research Institute | Monitoring soil compaction |
| US5471391A (en) * | 1993-12-08 | 1995-11-28 | Caterpillar Inc. | Method and apparatus for operating compacting machinery relative to a work site |
| FR2738022B1 (en) * | 1995-08-21 | 1997-11-14 | Etat Francais Laboratoire Cent | METHOD AND MATERIAL FOR AIDING THE OPERATION OF A COMPACTION MACHINE |
| JPH09125700A (en) * | 1995-11-07 | 1997-05-13 | Fujita Corp | Remote-operation support system of vibration roller |
| US6460006B1 (en) * | 1998-12-23 | 2002-10-01 | Caterpillar Inc | System for predicting compaction performance |
| DE19956943B4 (en) * | 1999-11-26 | 2020-03-19 | Bomag Gmbh | Device for controlling the compaction in vibration compaction devices |
| DE10028949A1 (en) * | 2000-06-16 | 2002-03-07 | Bomag Gmbh | Method and device for determining the degree of compaction in soil compaction |
| JP2002115207A (en) * | 2000-10-11 | 2002-04-19 | Kajima Road Co Ltd | Compaction car for paving material |
| JP4362646B2 (en) * | 2001-07-06 | 2009-11-11 | 農工大ティー・エル・オー株式会社 | Soil property observation equipment |
| JP4084608B2 (en) * | 2001-09-20 | 2008-04-30 | 大成建設株式会社 | Compaction management device |
| US6821052B2 (en) * | 2001-10-09 | 2004-11-23 | William Harrison Zurn | Modular, robotic road repair machine |
| JP3927458B2 (en) * | 2002-07-08 | 2007-06-06 | 大成建設株式会社 | Management method of compaction area |
| US6973821B2 (en) * | 2004-02-19 | 2005-12-13 | Caterpillar Inc. | Compaction quality assurance based upon quantifying compactor interaction with base material |
| US20060034660A1 (en) * | 2004-08-10 | 2006-02-16 | Satzler Ronald L | Belted asphalt compactor |
| US7428455B2 (en) * | 2004-10-12 | 2008-09-23 | Caterpillar Inc. | Compaction indication by effective rolling radius |
| US20080267719A1 (en) * | 2007-04-24 | 2008-10-30 | Caterpillar Inc. | Towed compaction determination system utilizing drawbar force |
| US8099218B2 (en) * | 2007-11-30 | 2012-01-17 | Caterpillar Inc. | Paving system and method |
-
2007
- 2007-04-23 DE DE102007019419A patent/DE102007019419A1/en active Pending
-
2008
- 2008-04-16 EP EP08154648.3A patent/EP1985761B1/en not_active Revoked
- 2008-04-22 JP JP2008111397A patent/JP5137669B2/en active Active
- 2008-04-22 US US12/081,797 patent/US7873492B2/en active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0698152A1 (en) | 1993-04-29 | 1996-02-28 | Geodynamik H Thurner AB | Compaction index |
| EP1705293A1 (en) | 2005-03-23 | 2006-09-27 | Ammann Aufbereitung AG | Method and device for compacting an area of ground |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2013174458A1 (en) * | 2012-05-22 | 2013-11-28 | Hamm Ag | Method for planning and carrying out ground-compaction operations, in particular for asphalt compaction |
| EP2852707B1 (en) | 2012-05-22 | 2016-10-12 | Hamm AG | Method for planning and carrying out ground-compaction operations, in particular for asphalt compaction |
| US9982397B2 (en) | 2012-05-22 | 2018-05-29 | Hamm Ag | Method for planning and implementation of soil compacting processes, especially for asphalt compacting |
| EP3447191A1 (en) | 2017-08-24 | 2019-02-27 | MOBA - Mobile Automation AG | Method and device for compaction control |
| EP3992364A1 (en) * | 2020-11-03 | 2022-05-04 | Hamm AG | Method for compacting asphalt material |
| AU2021261837B2 (en) * | 2020-11-03 | 2023-08-24 | Hamm Ag | Method for compacting asphalt material |
Also Published As
| Publication number | Publication date |
|---|---|
| US7873492B2 (en) | 2011-01-18 |
| EP1985761A3 (en) | 2012-08-29 |
| JP2008268217A (en) | 2008-11-06 |
| JP5137669B2 (en) | 2013-02-06 |
| EP1985761B1 (en) | 2013-12-11 |
| US20080260462A1 (en) | 2008-10-23 |
| DE102007019419A1 (en) | 2008-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1985761B1 (en) | Method for determining the degree of compaction of asphalt and compacting machine as well as system for determining degree of compaction | |
| EP3456878B1 (en) | Method for monitoring the compression process in road construction and street roller | |
| DE69434631T2 (en) | Method and device for measuring the degree of compaction of a floor surface | |
| EP2515195B1 (en) | System for controlling construction site vehicles | |
| DE69501401T2 (en) | METHOD AND DEVICE FOR MONITORING AND COORDINATING SEVERAL TILLAGE MACHINERY ON A CONSTRUCTION SITE | |
| DE112016000279T5 (en) | SYSTEMS AND METHOD FOR GUIDING A COMPACTION MACHINE | |
| DE102008042454B4 (en) | Waking state estimator | |
| WO2017097555A1 (en) | Method for assisting a driver of a motor vehicle with respect to an eminent overtaking maneuver, and motor vehicle | |
| WO2006037360A1 (en) | Driver information system for information on the possibility of carrying out overtaking manoeuvres | |
| EP3502821A1 (en) | Self-propelled construction machine and method for controlling the same | |
| EP1613812A1 (en) | System and method for the automatic compaction of soil | |
| DE102010054755A1 (en) | Method for compaction measurement of soil in building project i.e. road construction project, involves displaying data representing compaction state of parts of material regions over two display regions | |
| DE102015013808B4 (en) | Device and method for controlling the damping of a vehicle | |
| EP3147406B1 (en) | Measuring system and method for compression control and computer program with a program code for execution of the method | |
| EP3896223A1 (en) | Method for manufacturing a road paving and asphalting system | |
| EP1876297B1 (en) | Device and method for determining the position of a road compactor with respect to a finisher | |
| EP3455843A1 (en) | Method for reproducing a map display in a vehicle depending on a driving situation | |
| DE102004016745A1 (en) | Car navigation device | |
| WO2005029439A1 (en) | Method and device for determining a position of a motor vehicle on a road | |
| DE102007053610A1 (en) | Compression determining method for agricultural horizontal silo, involves considering characteristics of agricultural goods in horizontal silo during determination of local compression, and detecting position of compressor vehicle | |
| DE102014100569A1 (en) | Navigation method and navigation system | |
| DE102022115469A1 (en) | SYSTEM AND PROCEDURE FOR MARKING A BOUNDARY DURING DEFINITION OF AUTONOMOUS WORK AREA | |
| EP4313711A1 (en) | Segment-based driver analysis and individualized driver assistance | |
| DE102019120490B4 (en) | Method and system for detecting and evaluating road characteristics using a vehicle | |
| EP3398828B1 (en) | Driver assistance system and method for supporting a driver of a rail vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HR HU IE IS IT LI LT LU LV MC MT NL NO PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA MK RS |
|
| RIC1 | Information provided on ipc code assigned before grant |
Ipc: E01C 19/28 20060101AFI20120726BHEP |
|
| 17P | Request for examination filed |
Effective date: 20130228 |
|
| AKX | Designation fees paid |
Designated state(s): CH CZ DE FR LI SE |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20130711 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH CZ DE FR LI SE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: ISLER AND PEDRAZZINI AG, CH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502008011048 Country of ref document: DE Effective date: 20140130 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: TRGR |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502008011048 Country of ref document: DE |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| PLBI | Opposition filed |
Free format text: ORIGINAL CODE: 0009260 |
|
| 26 | Opposition filed |
Opponent name: CATERPILLAR INC. Effective date: 20140902 |
|
| PLAX | Notice of opposition and request to file observation + time limit sent |
Free format text: ORIGINAL CODE: EPIDOSNOBS2 |
|
| 26 | Opposition filed |
Opponent name: ABG ALLGEMEINE BAUMASCHINEN-GESELLSCHAFT MBH Effective date: 20140910 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R026 Ref document number: 502008011048 Country of ref document: DE Effective date: 20140902 |
|
| PLAB | Opposition data, opponent's data or that of the opponent's representative modified |
Free format text: ORIGINAL CODE: 0009299OPPO |
|
| R26 | Opposition filed (corrected) |
Opponent name: CATERPILLAR INC. Effective date: 20140902 |
|
| PLAF | Information modified related to communication of a notice of opposition and request to file observations + time limit |
Free format text: ORIGINAL CODE: EPIDOSCOBS2 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 8 |
|
| PLBB | Reply of patent proprietor to notice(s) of opposition received |
Free format text: ORIGINAL CODE: EPIDOSNOBS3 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 9 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 10 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 11 |
|
| PLCK | Communication despatched that opposition was rejected |
Free format text: ORIGINAL CODE: EPIDOSNREJ1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: THE PATENT HAS BEEN GRANTED |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| APBM | Appeal reference recorded |
Free format text: ORIGINAL CODE: EPIDOSNREFNO |
|
| APBP | Date of receipt of notice of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA2O |
|
| APBQ | Date of receipt of statement of grounds of appeal recorded |
Free format text: ORIGINAL CODE: EPIDOSNNOA3O |
|
| APAH | Appeal reference modified |
Free format text: ORIGINAL CODE: EPIDOSCREFNO |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20210430 Year of fee payment: 14 Ref country code: CZ Payment date: 20210406 Year of fee payment: 14 Ref country code: FR Payment date: 20210421 Year of fee payment: 14 |
|
| APBU | Appeal procedure closed |
Free format text: ORIGINAL CODE: EPIDOSNNOA9O |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R103 Ref document number: 502008011048 Country of ref document: DE Ref country code: DE Ref legal event code: R064 Ref document number: 502008011048 Country of ref document: DE |
|
| RDAF | Communication despatched that patent is revoked |
Free format text: ORIGINAL CODE: EPIDOSNREV1 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: PATENT REVOKED |
|
| RDAG | Patent revoked |
Free format text: ORIGINAL CODE: 0009271 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| 27W | Patent revoked |
Effective date: 20220121 |
|
| REG | Reference to a national code |
Ref country code: SE Ref legal event code: ECNC |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20220422 Year of fee payment: 15 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20220421 Year of fee payment: 15 |