EP1880971B1 - Procédé de commande de l'orientation d'une charge de grue - Google Patents
Procédé de commande de l'orientation d'une charge de grue Download PDFInfo
- Publication number
- EP1880971B1 EP1880971B1 EP07007445.5A EP07007445A EP1880971B1 EP 1880971 B1 EP1880971 B1 EP 1880971B1 EP 07007445 A EP07007445 A EP 07007445A EP 1880971 B1 EP1880971 B1 EP 1880971B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- load
- crane
- controlling
- orientation
- moment
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Not-in-force
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66C—CRANES; LOAD-ENGAGING ELEMENTS OR DEVICES FOR CRANES, CAPSTANS, WINCHES, OR TACKLES
- B66C13/00—Other constructional features or details
- B66C13/04—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack
- B66C13/08—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for depositing loads in desired attitudes or positions
- B66C13/085—Auxiliary devices for controlling movements of suspended loads, or preventing cable slack for depositing loads in desired attitudes or positions electrical
Definitions
- the present invention relates to a method for controlling the orientation of a crane load, wherein a manipulator for handling the load by a rotator means is connected to a hook hanging on ropes and the angle of rotation ⁇ L of the load by a control device using the moment of inertia J L of the load as most important parameter is controlled.
- control and automation concepts for mobile harbor cranes are disclosed.
- the manipulator hangs to accommodate the load on ropes, and positioning the manipulator to pick up containers causes ball pendulum movements.
- the control concepts use trajectory tracking control to control the movement of the load and automatically avoid jogging, thereby improving the efficiency of the cargo handling process.
- a method of controlling the orientation of the crane load is off DE 100 29 579 the entire contents of which are incorporated by reference into the present invention.
- the hanging on ropes hook on a hydraulic drive containing rotator device, so that the Manipulator for picking up containers can be rotated about a vertical axis.
- the hydraulic motors of the rotator device are actuated, and a resulting flow causes a torque. If the hook hangs on ropes, the torque would result in torsional vibration of the manipulator and the load. To position the load at a specific angle ⁇ L , this torsional vibration must be compensated.
- the known control method uses a dynamic model of the system based on the equations of motion of a physical model of the crane, the known anti-torsional vibration control consisting of a path planning module and a trajectory tracking module.
- the path planning module calculates the path of the variables describing the state of the system and generates a reference function. Trajectory tracking control can be subdivided into noise suppression, feedforward control, and state feedback control.
- the parameters used by the controller are the mass of the load and, above all, the moment of inertia of the load.
- the mass distribution in the load eg a container
- the moment of inertia of the load is also unknown. Therefore, the moment of inertia J L of the load must be estimated. In the known control system, this is done by assuming a homogeneous mass distribution in the load and calculating an estimated moment of inertia J L of the load solely from the mass of the container and the known dimensions of the container.
- the load distribution in a container is usually anything but homogeneous, so that the estimated value of the load J L is only a very inaccurate approximation.
- the controller uses the moment of inertia J L of the load as a parameter for controlling the orientation of the crane load, the difference between the true one Value of the moment of inertia J L and the rough estimate of inaccuracy in controlling the orientation of the load.
- From the DE 199 07 989 A1 is a method for rail control of cranes and a device for accurate pathway of a load known. For the path control also the moment of inertia of the load is used.
- the object of the present invention is therefore to provide a method for controlling the orientation of the crane load, which has a better accuracy.
- control means for controlling the rotation angle ⁇ L of the load is an adaptive control means, wherein the moment of inertia J L of the load during crane operation is determined from data which by measuring the system condition.
- the controller is adjusted during crane operation by using a corrected value of the moment of inertia J L determined during crane operation from the data obtained by measuring the system state as a parameter. Therefore, the controller does not use a once-estimated fixed value, but a value that is adjusted with the help of further information obtained during crane operation.
- the angle of rotation ⁇ L of the load is advantageously controlled by means of an adaptive trajectory tracking control.
- This allows effective control of the movements of the crane load.
- an auxiliary control law may be used to calculate the orbits of the system variables based on forward integration of the equations of motion of the system, and a state feedback control may use data obtained by measuring the system state.
- the difference ⁇ C between the angle of rotation ⁇ L of the load and the angle of rotation ⁇ H of the hook can be changed by the rotator device.
- torsional vibrations are avoided by an anti-vibration device using the data calculated by the dynamic model.
- This anti-torsional vibration device uses the data calculated by the dynamic model to control the rotator device to avoid vibrations of the load.
- the anti-torsional vibrator may generate control signals that counteract the possible predicted potential vibrations of the load from the dynamic model.
- the anti-vibration device may generate signals for actuating the hydraulic motor, thereby applying a torque generated by the resulting flow.
- the difference ⁇ C between the angle of rotation ⁇ L of the load and the angle of rotation ⁇ H of the hook by one with the rotator device measured transmitter.
- This transmitter allows the exact measurement of the difference ⁇ C and thus helps to control the orientation of the load.
- the movements of a cardan element guided through the cable are measured in order to obtain data by which the angle of rotation ⁇ H of the hook and / or the angle of rotation ⁇ L of the load can be determined.
- the cardanic element is preferably connected by gimbal connection to the jib head of the crane and follows the movements of the rope on which it is guided by rollers. By measuring the movements of the gimbal, the movements of the rope can be determined. Since the hook usually hangs on several ropes, preferably at least two gimbal elements are provided to determine the movements of at least two of these ropes. The angle of rotation ⁇ H of the hook hanging on the ropes and / or the angle of rotation ⁇ L of the load can then be determined from the data obtained by measuring the movements of the gimbals.
- a gyroscope is used to obtain data by which the angle of rotation ⁇ H of the hook and / or the angle of rotation ⁇ L of the load can be determined.
- the use of a gyroscope is a particularly effective way to obtain this data with sufficient precision.
- the gyroscope can be attached to different locations on the crane. If cardanic elements are used, the gyroscope can be attached to the gimbals to measure their movements, but it is also possible to attach the gyroscope directly to the hook or to the manipulator.
- the change ⁇ H of the angle of rotation ⁇ H of the hook and / or the change ⁇ H , of the angle of rotation ⁇ L of the load is measured by a gyroscope.
- the gyroscope can be mounted either on the hook or on the manipulator be, but preferably on the hook. Gyroscopes can measure the angular velocities ⁇ H and ⁇ I , which enables a determination of the angle of rotation ⁇ H of the hook and of ⁇ L. If .phi H is measured by the gyroscope, ⁇ H can be determined by integration.
- the rotational angle ⁇ L of the load can then be calculated by using the difference ⁇ C between the rotational angle ⁇ L of the load and the rotational angle ⁇ H of the hook measured by the transducer. Since the value of ⁇ H measured by the gyroscope contains noise and an offset, direct integration would result in summation of these errors, which would lead to poor accuracy results. Therefore, advantageously, an observer is used to compensate for the offset. This allows a more stable estimate of the rotation angle ⁇ L from the angular velocity ⁇ H.
- the dynamic model of the system is based on the equations of motion of a physical model of at least the ropes, the hook and the load.
- the hook and the load hanging on the ropes form a torsion pendulum whose equations of motion are determined by means of e.g. of the Lagrange formalism can be determined. This allows a realistic description of the system and therefore precise path planning and control.
- the moment of inertia J H of the hook and J Sp of the manipulator are used as parameters for the control of the angle of rotation ⁇ L of the load. Even though the moment of inertia J H of the hook and J Sp of the manipulator are usually smaller than the inertia element J L of the load, they nevertheless contribute to the rotational behavior of the system and should be taken into account in the calculations and the physical model.
- a torque is applied to the load and / or the hook during operation of the crane.
- the data obtained by measuring the system state comprises at least the change ⁇ H of the angle of rotation ⁇ H of the hook and / or the change ⁇ I , the angle of rotation ⁇ L of the load in response to the torque applied to the load and / or the hook.
- This data can then be used to estimate the moment of inertia J L of the load, eg by comparing the data calculated from the dynamic model with the measured data.
- a value of the moment of inertia J L0 which is estimated on the basis of the mass and the dimensions of the load alone, is used as the output value for J L , and corrected values J Lk are in one iterative process is determined to determine the moment of inertia J L. This gives a rough estimate of the output value for J L "from the data that is readily available while better estimates are made during crane operation based on the additional data obtained by measuring the system condition.
- data describing the system state are calculated from the dynamic model based on a value J L, k-1 of the moment of inertia J L , and a corrected value J Lk of the moment of inertia J L is determined from the calculated data and the data obtained by measuring the system state to determine the moment of inertia J L.
- This allows a much better estimate of the moment of inertia J L than the use of mass and the dimensions of the load alone.
- the moment of inertia J L is determined according to the invention with the help of an observer.
- This method of estimating the moment of inertia J L uses data computed by the dynamic model and combines it with data, obtained by measuring the system state to estimate the parameter J L of the dynamic model.
- a parameter of the model is determined with the aid of an observer, which leads to an adaptive control.
- the problem becomes non-linear, so that the moment of inertia J L is advantageously determined by means of a non-linear observer.
- a nonlinear observer especially in time-variant models, for example a high-gain approach or the extended Kalman filter.
- noise in the data obtained by measurements is taken into account in the determination of the moment of inertia J L. This leads to more precision in the estimation of the moment of inertia J L , which is based on the measured data and therefore influenced by noise in the measurements.
- the noise in the data obtained by measurements is modeled by covariance matrices. This allows a quantitative description influence of noise and can minimize the errors resulting from noise.
- covariance matrices are advantageously determined experimentally. By testing the control system with different values for the covariance matrices, the best values for a fast and stable estimation of the moment of inertia J L can be determined and used for the observer.
- the present invention further includes a system for controlling the orientation of a crane load using one of the methods described above.
- a control system comprises a control device for controlling the rotation angle ⁇ L of the load.
- the control device includes a web planning device and a web control device and an observer for estimating the moment of inertia J L.
- the present invention further comprises a crane, in particular a jib crane, comprising a system for controlling the rotation of a crane load by means of one of the methods described above.
- a crane comprises a hook-hanging hook, a rotator device and a manipulator.
- the crane also includes an anti-sway control system which cooperates with the system for controlling the rotation of a crane.
- the crane is a jib crane, it comprises a boom that can be swung up and down about a horizontal axis and rotated by a tower about a vertical axis. Furthermore, the length of the rope can be changed.
- Jib cranes are often used to handle cargo handling operations in ports.
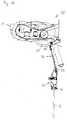
- a mobile harbor crane will be in Fig. 1 a shown.
- the crane has a load capacity of up to 140 t and a rope length of up to 80 m. It comprises a boom 1, which can be pivoted up and down about a horizontal axis, which is formed by the hinge axis 2, with which it is attached to a tower 3.
- the tower 3 can be rotated about a vertical axis, whereby the boom 3 is rotated with this.
- the tower 3 is attached to a mounted on wheels 7 undercarriage 6.
- the length of the rope 8 can be changed by winds.
- the load 10 may be received by a manipulator or spreader 20 which may be rotated by rotator means 15 mounted in a hook hanging on the rope 8.
- the load 10 is rotated either by rotating the tower and thereby the whole crane or by using the rotator means 15. In practice, both rotations must be used simultaneously to align the load in a desired position.
- control concept of the invention can be easily integrated into a control concept for the entire crane.
- the present invention discloses a determination method for improving these control and automation concepts of a mobile harbor crane, which in DE 10064182 . DE 10324692 and DE 10029579 as in O. Sawodny, H. Aschemann, J. kumpel, C. Tarin, K. Schneider, Anti-Sway Control for Boom Cares, American Control Conference, Anchorage USA, Proc. Pages 244-249, 2002 ; O.
- the present invention discloses a method of determining the moment of inertia of the load during crane operation based on data obtained by measuring the system. This type of estimation of the moment of inertia of the load with the aid of an observer approach leads to a better accuracy of the control method.
- Fig. 1b shows a gimbal element 35 which is attached to the boom head 30 of a boom 1 by gimbals 32 and 33 under the main role 31.
- the gimbal element 35 has rollers 36, by which it is guided on the rope 8, so that it follows the movements of the rope 8.
- the gimbals 32 and 33 allow the gimbal element 35 to freely move about a horizontal and a vertical axis, but prevent rotational movements. The movements of the gimbal and thus the movements of the rope can be measured.
- two gimbals 35 are provided, which are guided on the two cables to which the hook hangs.
- a gyroscope can be attached to the gimbals. If no gimbals are used, a gyroscope can also be attached directly to the hook or manipulator to determine its rotation angle.
- various observer methods for determining the moment of inertia of the load during crane operation can be used based on data obtained by measuring the system.
- the standard least squares method is unsatisfactory in estimating time-varying parameters.
- an exponential forgetting of the older data can be used.
- the so-called forgetting factor can be chosen such that the resulting gain matrix keeps a constant track. This approach can be further developed into the gain-fit forgetting method in which the forgetting factor is constantly changed according to the Gain Matrix norm.
- Another method for determining the parameters of dynamic systems is the extended Kalman filter used in the embodiment of the present invention. There are several advantages to using this technique, which will be discussed later.
- Fig. 2 shows a known adaptive control concept for managing the orientation of the load (of the container).
- This in O. Sawodny, A. Hildebrandt, K. Schneider, Control Design for the Crane Loads for Boom Cranes, International Conference on Robotics & Automation, Taipei Taiwan, Proc. Pages 2182-2187, 2003 ) and also in DE 10029579
- the disclosed control concept consists of a trajectory tracking control, an observer and a state feedback control to prevent torsional vibrations.
- the torsion angle is reconstructed from the angular velocity measured by a gyroscope in the hook.
- the angle between the hook and the container is measured by a transducer.
- the load orientation is obtained by summing both angles. Due to the fact that all parts of the control concept are model-based algorithms, they must be adapted to parameter changes. Most parameters can be measured directly, but the distribution of the load mass in the container and thus the moment of inertia of the container is unknown.
- the jib crane is equipped with a special manipulator, the so-called spreader.
- the manipulator can be rotated about the vertical axis by a rotator device containing a hydraulic drive. As in FIG. 4 is shown, this device is installed in the hook.
- the hook is attached to two ropes, where r and I s indicate the effective distance between the two parallel ropes or the rope length.
- the system consists of three extended bodies.
- the load (container), characterized by the moment of inertia J L , and the mass m L , the manipulator (container spreader) and the hook.
- J Sp and J H indicate the moment of inertia of the spreader and the hook, m Sp and m H respectively indicate the mass of the two bodies.
- the angle of rotation of the spreader with load is referred to as ⁇ L.
- the second angle ⁇ H indicates the torsion angle.
- the moment of inertia of the container during crane operation must be determined in order to adapt the model-based control concept. Due to this fact, the inertial moment determination algorithm must be iterative so that each time an accurate measurement of input / output data is obtained, a new parameter estimate is generated. In the past, a number of system determination methods were discussed. One of the methods for online parameter determination is the extended Kalman filter.
- a start pulse is generated at the moment a container is picked up.
- the states observed by the observer [ ⁇ H ⁇ H ] at this moment are the initial estimate x 0 for the filter algorithm.
- the output covariance matrix for the estimation error P 0 is used to tune the determination algorithm (see Section 4).
- the determination algorithm is implemented in a simulated environment. As in FIG. 5 is shown, the simulation model is terminated by the measurement signal ⁇ c_measured from the real system. Furthermore, a sequence of white noise is added to the output of the simulation model.
- the simulation results shown are obtained by using this configuration.
- the three curves represented the results obtained by using three different initial values for the covariance matrix of the estimation error. The higher the values of this matrix, the faster the estimated moment of inertia of the container reaches the reference value J Lmodel .
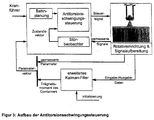
- the algorithm is implemented in the control and automation concept of the boom crane, in particular in the adaptive anti-torsional vibration control part, as in FIG. 3 is set out.
- the obtained experimental results are obtained online calculates the algorithm for the extended Kalman filter during crane operation.
- FIG. 7 shows, however, that the estimate of the moment of inertia of the load approaches the reference value of 36,000kgm 2 .
- the initial value for the moment of inertia ⁇ L0 was 47 . 000kgm 2 , and the remaining parameters and initial conditions were the same as the simulation configuration . Since the excitation of the torsional motion was stopped at 150 seconds, there is a residual deviation between the estimated J L and the reference value. Given the slow dynamic behavior of the flexible system, the estimated moment of inertia quickly approaches the values in the tolerance range around the reference value. A deviation of ⁇ 5% between ⁇ I and the reference value of the moment of inertia has no great effect on the performance of the anti-torsional vibration control.
- FIG. 8 shows the estimated moment of inertia of the load when the output value ⁇ L0 is equal to the reference value. In this case, the mass of the container is evenly distributed (see equation (24)).
- the obtained determination result of the parameter J L shows the robustness of the algorithm of the extended Kalman filter, since no estimates are calculated outside the tolerance range of ⁇ 5%.
- the small deviations between the estimated parameter and the reference value are caused by model uncertainties.
- the present invention discloses an extension of a control and automation concept for the orientation of a crane load. Because this concept is an adaptive model-based algorithm, the parameters of the dynamic model must be known as precisely as possible. Most parameters can be measured directly, but the moment of inertia of the crane load (container) must be determined based on the unknown distribution of mass during crane operation.
- the determination method used, the extended Kalman filter algorithm is derived from the dynamic model of the manipulator hanging from the cable. This parameter determination method is integrated into the anti-torsional vibration control and tested on a LIEBHERR LHM 402 mobile harbor crane. The obtained measurement results show the fast approach and the robustness of estimating the unknown moment of inertia of the crane load.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Control And Safety Of Cranes (AREA)
- Jib Cranes (AREA)
Claims (22)
- Procédé de commande de l'orientation d'une charge de grue, dans lequel un manipulateur destiné à manipuler la charge est relié à un crochet suspendu à des câbles par un dispositif rotateur et l'angle de rotation ϕ L de la charge est commandé comme paramètre le plus important par un dispositif de commande à l'aide du moment d'inertie JL de la charge, le dispositif de commande étant un dispositif de commande adaptatif, le moment d'inertie JL de la charge étant déterminé pendant le fonctionnement de la grue sur la base d'au moins une des grandeurs suivantes obtenues par la mesure de l'état du système : angle de rotation ϕ H du crochet, angle de rotation ϕ L de la charge, modification ϕ̇ H de l'angle de rotation ϕ H du crochet et/ou modification ϕ̇ I de l'angle de rotation ϕ L de la charge,
caractérisé en ce que
un gyroscope est utilisé pour obtenir des données, permettant de déterminer l'angle de rotation ϕ H du crochet et/ou l'angle de rotation ϕ L de la charge, le moment d'inertie JL étant déterminé à l'aide d'un observateur. - Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce que l'angle de rotation ϕ L de la charge est commandé à l'aide d'une commande de suivi de trajectoire adaptative.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce qu'un modèle dynamique du système est utilisé pour calculer des données décrivant l'état du système.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 3, caractérisé en ce que les oscillations de torsion sont évitées par un dispositif anti-oscillations de torsion à l'aide des données calculées par le modèle dynamique.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce que la différence ϕ C entre l'angle de rotation ϕ L de la charge et l'angle de rotation ϕ H du crochet peut être modifiée par le dispositif rotateur.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce que la différence ϕ C entre l'angle de rotation ϕ L de la charge et l'angle de rotation ϕ H du crochet est mesurée par un capteur de mesure relié au dispositif rotateur.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce que les mouvements d'un élément à Cardan guidé par le câble sont mesurés afin d'obtenir des données permettant de déterminer l'angle de rotation ϕ H du crochet et/ou l'angle de rotation ϕ L de la charge.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce que la modification ϕ̇ H de l'angle de rotation ϕ H du crochet et/ou la modification ϕ̇ I de l'angle de rotation ϕ L de la charge sont mesurées par un gyroscope.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 3, caractérisé en ce que le modèle dynamique du système repose sur les équations de mouvement d'un modèle physique au moins des câbles, du crochet et de la charge.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1 ou 3, caractérisé en ce que les moments d'inertie JH du crochet et JSp du manipulateur sont utilisés comme paramètres.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce qu'un couple de rotation est appliqué sur la charge et/ou le crochet pendant le fonctionnement de la grue.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 11, caractérisé en ce que les données obtenues par la mesure de l'état du système comprennent au moins la modification ϕ̇ H de l'angle de rotation ϕ H du crochet et/ou la modification ϕ̇ I de l'angle de rotation ϕ L de la charge comme réaction au couple de rotation appliqué sur la charge et/ou le crochet.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce qu'une valeur du moment d'inertie JL0 estimée uniquement sur la base de la masse et des dimensions de la charge est utilisée comme valeur initiale pour JL et des valeurs corrigées JLk sont déterminées dans un processus itératif pour déterminer le moment d'inertie JL .
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 3, caractérisé en ce que, pendant le fonctionnement de la grue, des données décrivant l'état du système sont calculées par le modèle dynamique sur la base d'une valeur JL,k-1 du moment d'inertie JL et une valeur corrigée JLk du moment d'inertie JL est déterminée au moyen des données calculées et des données obtenues par la mesure de l'état du système pour déterminer le moment d'inertie JL .
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce que le moment d'inertie JL est déterminé à l'aide d'un observateur non linéaire.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce que le moment d'inertie JL est déterminé à l'aide d'un filtre de Kalman étendu.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce qu'une répartition homogène de la masse dans la charge est supposée pour une estimation d'une valeur initiale JL0 du moment d'inertie JL de la charge.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 1, caractérisé en ce que du bruit dans les données obtenues par des mesures est pris en compte pour la détermination du moment d'inertie JL .
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 18, caractérisé en ce que le bruit dans les données obtenues par des mesures est modélisé par des matrices de covariance.
- Procédé de commande de l'orientation d'une charge de grue selon la revendication 19, caractérisé en ce que les matrices de covariance sont déterminées de manière expérimentale.
- Système de commande de l'orientation d'une charge de grue selon le procédé de l'une des revendications précédentes, comprenant un dispositif de commande destiné à commander l'angle de rotation ϕ L de la charge et un gyroscope destiné à obtenir des données, permettant de déterminer l'angle de rotation du crochet ϕ H et/ou l'angle de rotation ϕL de la charge, le dispositif de commande comportant un dispositif de suivi de trajectoire et un dispositif de commande de trajectoire ainsi qu'un observateur destiné à estimer le moment d'inertie JL .
- Grue, en particulier grue à flèche, qui comprend le système de commande de la rotation d'une charge de grue selon la revendication 21.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102006033277A DE102006033277A1 (de) | 2006-07-18 | 2006-07-18 | Verfahren zum Steuern der Orientierung einer Kranlast |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP1880971A2 EP1880971A2 (fr) | 2008-01-23 |
| EP1880971A3 EP1880971A3 (fr) | 2009-04-29 |
| EP1880971B1 true EP1880971B1 (fr) | 2016-09-21 |
Family
ID=38581907
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP07007445.5A Not-in-force EP1880971B1 (fr) | 2006-07-18 | 2007-04-11 | Procédé de commande de l'orientation d'une charge de grue |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US7850025B2 (fr) |
| EP (1) | EP1880971B1 (fr) |
| DE (1) | DE102006033277A1 (fr) |
| ES (1) | ES2608403T3 (fr) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020120699A1 (de) | 2020-08-05 | 2022-02-10 | Konecranes Global Corporation | Auslegerdrehkran mit einer Kamera sowie Verfahren zur Reduzierung von Lastpendelungen im Kranbetrieb |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP1992583B2 (fr) | 2007-05-16 | 2023-11-22 | Liebherr-Werk Nenzing GmbH | Commande de grue, grue et procédé |
| DE102007039408A1 (de) | 2007-05-16 | 2008-11-20 | Liebherr-Werk Nenzing Gmbh | Kransteuerung, Kran und Verfahren |
| WO2009038399A2 (fr) * | 2007-09-20 | 2009-03-26 | Posco | Appareil de contrôle de la position de griffes de grue en fonction de la flexion des dalles à transporter et procédé associé |
| TWI444939B (zh) * | 2008-01-10 | 2014-07-11 | Univ Nat Taiwan | 工程吊車之模擬系統及其方法 |
| CN101301981B (zh) * | 2008-05-23 | 2010-06-02 | 中国石油化工集团公司 | 一种吊装方法 |
| CN101381054B (zh) * | 2008-09-12 | 2010-12-29 | 中国石油化工集团公司 | 吊车推举法吊装立式设备用铰支座 |
| DK2370925T3 (da) * | 2008-12-15 | 2021-05-31 | Oceaneering Int Inc | Platformsforsyningshåndteringsindretning |
| JP4565034B2 (ja) * | 2008-12-16 | 2010-10-20 | ファナック株式会社 | イナーシャ推定を行う制御装置及び制御システム |
| DE102009032269A1 (de) | 2009-07-08 | 2011-01-13 | Liebherr-Werk Nenzing Gmbh | Kransteuerung zur Ansteuerung eines Hubwerkes eines Kranes |
| DE102009032270A1 (de) * | 2009-07-08 | 2011-01-13 | Liebherr-Werk Nenzing Gmbh | Verfahren zur Ansteuerung eines Antriebs eines Kranes |
| EP2364948B1 (fr) * | 2010-03-08 | 2012-05-09 | Liebherr-Werk Ehingen GmbH | Grue |
| CN101948080B (zh) * | 2010-08-17 | 2012-07-18 | 中国石油化工股份有限公司 | 一种降低设备尾部溜尾高度的方法 |
| CN102953335B (zh) * | 2011-08-18 | 2015-08-05 | 上海振华重工(集团)股份有限公司 | 重型钢塔竖立吊装方法和系统 |
| EP2562125B1 (fr) * | 2011-08-26 | 2014-01-22 | Liebherr-Werk Nenzing GmbH | Appareil de commande de grue |
| CN102336362A (zh) * | 2011-09-08 | 2012-02-01 | 中联重科股份有限公司 | 测量塔式起重机的起重力矩的方法、装置以及监控系统 |
| US9555899B2 (en) * | 2014-03-27 | 2017-01-31 | The United States Of America As Represented By The Secretary Of The Navy | Mobile arresting system |
| DE102014008094A1 (de) | 2014-06-02 | 2015-12-03 | Liebherr-Werk Nenzing Gmbh | Verfahren zum Steuern der Ausrichtung einer Kranlast und Auslegekran |
| US9829344B2 (en) * | 2015-03-18 | 2017-11-28 | The Boeing Company | Cable angle sensor |
| EP3359480B1 (fr) * | 2015-10-08 | 2023-07-12 | Verton IP Pty Ltd | Systèmes et procédés de gestion de matériaux |
| DE102016004350A1 (de) | 2016-04-11 | 2017-10-12 | Liebherr-Components Biberach Gmbh | Kran und Verfahren zum Steuern eines solchen Krans |
| CN106272436B (zh) * | 2016-10-09 | 2018-10-30 | 上海派毅智能科技有限公司 | 一种基于变负载的服务机器人自适应控制方法 |
| US10273124B2 (en) | 2016-12-15 | 2019-04-30 | Caterpillar Inc. | Rotation control system for material handling machines |
| US20180346294A1 (en) * | 2017-05-30 | 2018-12-06 | Versatile Natures Ltd. | Method and apparatus for load handling |
| US11511972B1 (en) | 2019-09-26 | 2022-11-29 | Versatile, Inc. | System for tracking lifting events at a construction site |
| US12099337B1 (en) * | 2019-12-06 | 2024-09-24 | Vita Inclinata Ip Holdings Llc | Control moment gyroscope hoist stabilization system, method, and apparatus |
| CN111268564B (zh) * | 2020-02-10 | 2021-05-28 | 河北工业大学 | 基于迭代-遗传算法的智能天车防摆控制系统 |
| DE102020113699A1 (de) | 2020-05-20 | 2021-11-25 | TenneT TSO GmbH | Hebeeinrichtung und ein mit einer solchen Hebeeinrichtung ausgestattetes Wasserfahrzeug sowie ein hierfür bestimmtes Arbeitsverfahren |
| CN115186715B (zh) * | 2022-07-20 | 2023-07-28 | 哈尔滨工业大学 | 一种基于状态空间模型的机电定位系统贝叶斯辨识方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US1899266A (en) * | 1931-06-06 | 1933-02-28 | Condor Company | Doorcheck |
| JPS626848A (ja) | 1985-07-02 | 1987-01-13 | Honda Motor Co Ltd | 車輌用物入れボツクスの蓋開閉装置 |
| DE3815450C2 (de) * | 1988-05-06 | 1995-03-09 | Grass Alfred Metallwaren | Weitwinkel-Scharnier mit Zahnrad-Getriebe |
| US5089972A (en) * | 1990-12-13 | 1992-02-18 | Nachman Precision Systems, Inc. | Moored ship motion determination system |
| DE19907989B4 (de) * | 1998-02-25 | 2009-03-19 | Liebherr-Werk Nenzing Gmbh | Verfahren zur Bahnregelung von Kranen und Vorrichtung zum bahngenauen Verfahren einer Last |
| DE19826695A1 (de) * | 1998-06-16 | 1999-12-23 | Siemens Ag | Verfahren und Vorrichtung zur Ausregelung eines Verdrehwinkels einer Last |
| US6241462B1 (en) * | 1999-07-20 | 2001-06-05 | Collaborative Motion Control, Inc. | Method and apparatus for a high-performance hoist |
| DE29921246U1 (de) * | 1999-12-02 | 2000-02-24 | Siemens AG, 80333 München | Steuervorrichtung zur Überwachung und Regelung von Schwingungsbewegungen von Kranlasten |
| DE10007406A1 (de) | 2000-02-18 | 2001-08-23 | Volkswagen Ag | Schließbarer Behälter, insbesondere Humidor |
| DE10029579B4 (de) * | 2000-06-15 | 2011-03-24 | Hofer, Eberhard P., Prof. Dr. | Verfahren zur Orientierung der Last in Krananlagen |
| US6496765B1 (en) * | 2000-06-28 | 2002-12-17 | Sandia Corporation | Control system and method for payload control in mobile platform cranes |
| DE10064182A1 (de) * | 2000-10-19 | 2002-05-08 | Liebherr Werk Nenzing | Kran oder Bagger zum Umschlagen von einer an einem Lastseil hängenden Last mit Lastpendelungsdämpfung |
| DE10159140A1 (de) | 2000-12-22 | 2002-07-04 | Blum Gmbh Julius | Schrankartiges Möbel und Scharnier zur Verwendung bei einem derartigen Möbel |
| US6826452B1 (en) * | 2002-03-29 | 2004-11-30 | The Penn State Research Foundation | Cable array robot for material handling |
| DE10223670A1 (de) * | 2002-05-28 | 2003-12-18 | Kuka Roboter Gmbh | Verfahren und Vorrichtung zum Bewegen eines Handhabungssystems |
| US7426423B2 (en) * | 2003-05-30 | 2008-09-16 | Liebherr-Werk Nenzing—GmbH | Crane or excavator for handling a cable-suspended load provided with optimised motion guidance |
-
2006
- 2006-07-18 DE DE102006033277A patent/DE102006033277A1/de not_active Withdrawn
-
2007
- 2007-04-11 ES ES07007445.5T patent/ES2608403T3/es active Active
- 2007-04-11 EP EP07007445.5A patent/EP1880971B1/fr not_active Not-in-force
- 2007-07-13 US US11/827,972 patent/US7850025B2/en not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102020120699A1 (de) | 2020-08-05 | 2022-02-10 | Konecranes Global Corporation | Auslegerdrehkran mit einer Kamera sowie Verfahren zur Reduzierung von Lastpendelungen im Kranbetrieb |
| WO2022029155A1 (fr) | 2020-08-05 | 2022-02-10 | Konecranes Global Corporation | Grue à flèche orientable dotée d'une caméra et procédé de réduction de l'oscillation de la charge pendant l'utilisation de la grue |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080017601A1 (en) | 2008-01-24 |
| EP1880971A2 (fr) | 2008-01-23 |
| DE102006033277A1 (de) | 2008-02-07 |
| EP1880971A3 (fr) | 2009-04-29 |
| ES2608403T3 (es) | 2017-04-10 |
| US7850025B2 (en) | 2010-12-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1880971B1 (fr) | Procédé de commande de l'orientation d'une charge de grue | |
| DE102019001948B4 (de) | Steuerung und maschinelle Lernvorrichtung | |
| DE102016012065B4 (de) | Robotersystem mit Funktion zum Berechnen von Position und Ausrichtung eines Sensors | |
| EP2502871B1 (fr) | Commande de grue, grue et procédé | |
| DE102018102995B4 (de) | Robotersystem | |
| EP0656868B1 (fr) | Procede et dispositif de commande d'un pont dechargeur pour conteneurs | |
| EP2952466A1 (fr) | Procédé pour commander l'orientation d'une charge de grue et grue à flèche | |
| DE102018005068A1 (de) | Kran und Verfahren zum Steuern eines solchen Krans | |
| EP2272637B1 (fr) | Procédé et dispositif destinés au fonctionnement d'un manipulateur | |
| EP2022749B1 (fr) | Échelle à plateau tournant | |
| WO2010121713A1 (fr) | Engin de chantier mobile équipé d'un dispositif de régulation de position d'un bras de travail et procédé pour réguler la position d'un bras de travail d'un engin de chantier mobile | |
| EP2878565B1 (fr) | Procédé de détermination d'au moins un angle d'oscillation et/ou angle de rotation d'une charge logée au niveau d'une grue via au moins un moyen de fixation de type câble et procédé d'amortissement de mouvements d'oscillation et/ou de mouvements de rotation de la charge | |
| DE112006002723T5 (de) | Winkel- und Winkelgeschwindigkeitssensor einer Lenkanordnung auf Fahrzeuggyroskopbasis | |
| EP3650179A1 (fr) | Système et procédé de détermination de la masse d'une charge utile déplacée par un appareil de travail | |
| EP2878566B1 (fr) | Procédé d'influence d'un mouvement d'une charge logée au niveau d'une grue | |
| DE112017008018T5 (de) | Kalibrierungsvorrichtung, kalibrierungsverfahren und steuerungsvorrichtung | |
| DE102019132738A1 (de) | Fahrzeugraddiagnose | |
| EP1992583A2 (fr) | Commande de grue, grue et procédé | |
| DE102007047190A1 (de) | Entstaubungsverfahren und entsprechende Entstaubungseinrichtung | |
| DE10029579A1 (de) | Verfahren zur Orientierung der Last in Krananlagen | |
| EP4130394A1 (fr) | Procédé de surveillance et/ou de mise en uvre d'un déplacement d'un appareil de travail, ainsi qu'appareil de travail et produit programme informatique | |
| DE19636425C1 (de) | Verfahren zur Navigation unter Verwendung unterschiedlicher Meßmethoden | |
| DE102019200117A1 (de) | Robotersteuerung | |
| DE102006052956B4 (de) | Verfahren und Vorrichtung zum Bewegen einer freischwingenden Last von einem Start- zu einem Zielpunkt | |
| EP0184632A2 (fr) | Dispositif d'initialisation et/ou de recalibrage d'un navigateur inertiel répétiteur |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK YU |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| AX | Request for extension of the european patent |
Extension state: AL BA HR MK RS |
|
| 17P | Request for examination filed |
Effective date: 20090417 |
|
| AKX | Designation fees paid |
Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| 17Q | First examination report despatched |
Effective date: 20130628 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| INTG | Intention to grant announced |
Effective date: 20160428 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE BG CH CY CZ DE DK EE ES FI FR GB GR HU IE IS IT LI LT LU LV MC MT NL PL PT RO SE SI SK TR |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: REF Ref document number: 830876 Country of ref document: AT Kind code of ref document: T Effective date: 20161015 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R096 Ref document number: 502007015118 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: LT Ref legal event code: MG4D Ref country code: NL Ref legal event code: MP Effective date: 20160921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LV Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161222 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2608403 Country of ref document: ES Kind code of ref document: T3 Effective date: 20170410 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: EE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 Ref country code: RO Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 Ref country code: BG Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20161221 Ref country code: SK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 Ref country code: IS Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170121 Ref country code: CZ Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20170123 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R097 Ref document number: 502007015118 Country of ref document: DE |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 |
|
| 26N | No opposition filed |
Effective date: 20170622 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20170411 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: MM4A |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST Effective date: 20171229 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170502 Ref country code: MC Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170430 Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170411 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170430 Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170411 |
|
| REG | Reference to a national code |
Ref country code: BE Ref legal event code: MM Effective date: 20170430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170411 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170430 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MM01 Ref document number: 830876 Country of ref document: AT Kind code of ref document: T Effective date: 20170411 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20170411 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20180430 Year of fee payment: 12 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: MT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: HU Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT; INVALID AB INITIO Effective date: 20070411 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: CY Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20160921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: TR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20160921 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20190411 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20200429 Year of fee payment: 14 Ref country code: ES Payment date: 20200505 Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 502007015118 Country of ref document: DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20211103 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20220701 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20210412 |