EP1099043B1 - Procede de commande d'un mecanisme de distribution electromagnetique pour soupape a gaz a deux voies dans un moteur a combustion interne a piston - Google Patents
Procede de commande d'un mecanisme de distribution electromagnetique pour soupape a gaz a deux voies dans un moteur a combustion interne a piston Download PDFInfo
- Publication number
- EP1099043B1 EP1099043B1 EP00935052A EP00935052A EP1099043B1 EP 1099043 B1 EP1099043 B1 EP 1099043B1 EP 00935052 A EP00935052 A EP 00935052A EP 00935052 A EP00935052 A EP 00935052A EP 1099043 B1 EP1099043 B1 EP 1099043B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- valve
- armature
- gas exchange
- actuator
- speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images










Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01L—CYCLICALLY OPERATING VALVES FOR MACHINES OR ENGINES
- F01L9/00—Valve-gear or valve arrangements actuated non-mechanically
- F01L9/20—Valve-gear or valve arrangements actuated non-mechanically by electric means
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01L—CYCLICALLY OPERATING VALVES FOR MACHINES OR ENGINES
- F01L9/00—Valve-gear or valve arrangements actuated non-mechanically
- F01L9/20—Valve-gear or valve arrangements actuated non-mechanically by electric means
- F01L9/21—Valve-gear or valve arrangements actuated non-mechanically by electric means actuated by solenoids
- F01L2009/2132—Biasing means
- F01L2009/2134—Helical springs
- F01L2009/2136—Two opposed springs for intermediate resting position of the armature
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01L—CYCLICALLY OPERATING VALVES FOR MACHINES OR ENGINES
- F01L9/00—Valve-gear or valve arrangements actuated non-mechanically
- F01L9/20—Valve-gear or valve arrangements actuated non-mechanically by electric means
- F01L9/21—Valve-gear or valve arrangements actuated non-mechanically by electric means actuated by solenoids
- F01L2009/2167—Sensing means
- F01L2009/2169—Position sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01L—CYCLICALLY OPERATING VALVES FOR MACHINES OR ENGINES
- F01L2201/00—Electronic control systems; Apparatus or methods therefor
Definitions
- DE 197 39 840 A1 describes the use of a displacement sensor and the controller a speed of the actuator.
- DE 197 23 405 A1 describes an energization of an electromagnet when an anchor enters its vicinity so to that a balance of forces between electromagnetic forces on the one hand and On the other hand, restoring forces are reached shortly before its end position at the poles and thereafter the energization is controlled so that the armature with a predetermined speed reached the pole face.
- the object of the invention is to control a solenoid valve drive improve with respect to a safe achievement of the Schlleßposition at the same time Avoidance of bounce, especially in the presence of a valve clearance and while avoiding the above-mentioned disadvantages.
- an inventive method for controlling an electromagnetic Actuator for actuating a gas exchange valve on a reciprocating internal combustion engine the one with the gas exchange valve operatively connected anchor, the against the force of at least one return spring between two electromagnets and is guided movable, whose energization by means of a sensor via a motor control (9) is controlled so that each of the catching magnets are controlled so that the anchor is introduced in "creeping" to the pole face, wherein for the adjustment a valve clearance during the closing movement of the gas exchange valve, the energization the catching magnet is controlled so that first the valve on its seat and after passing through the valve clearance the armature on the pole face gently at a speed of 0.2 m / s and less, becomes dependent on a position detection of the armature and the valve, the energization is controlled so that the armature a predetermined Road-speed profile, and recorded via the impact control Information about the movement of the gas exchange valve of the engine control supplied wherein a setpoint curve v (
- An inventive device for performing a method described above for controlling an electromagnetic actuator for actuating a gas exchange valve on a reciprocating internal combustion engine has one with the gas exchange valve operatively connected armature, against the force of at least one return spring is guided back and forth between two electromagnets whose Energization is controlled by means of a sensor via a motor control, wherein the Control is such that the respective catching magnets anchor in "creeping" bring to the pole face, and in a closed position of the valve a gap between Valve and armature is present, characterized in that a Ankerpositionsregier for gentle placement of the armature and a valve positioner for gentle touchdown of the valve are present, and the controller switching between two position controllers in the process in the closed position, wherein a setpoint curve v (s) of a given path-velocity profile in the last part of the movement flat is.
- Fig. 1 the basic principle of such electromagnetic Valve train with its control shown schematically.
- An electromagnetic valve drive for actuating a gas exchange valve 2 consists essentially of an actuator. 1 with a closing magnet 3 and a ⁇ ffnermagneten 4, the are spaced apart and between them Anchor 5 against the force of return springs, namely a Opening spring 7 and a closing spring 8 back and forth movable is guided.
- Fig. 1 the "classic" arrangement of the NC spring and the closing spring shown in the closed position.
- the closing spring 8 acts directly on with a the shaft 2.1 of the gas exchange valve 2 connected spring plate 2.2.
- the guide rod 11 of the electromagnetic Actuator is disconnected from the shaft 2.1, as a rule is here in the closed position, a gap in the form of the so-called valve clearance VS available.
- the opening spring 7 is supported in turn on a spring plate 11.1 on the guide rod 11 from, so that in the middle position with de-energized magnet under the oppositely directed action of opening spring 7 and Closing spring 8, the guide rod 11 on the shaft 2.1 the gas exchange valve 2 is supported.
- opening spring 7 it is also possible instead the opening spring 7 to provide only a single return spring, which is designed so that they each overshoot of the armature 5 on the middle layer a corresponding Restoring force builds up.
- a separate closing spring 8 is eliminated in order to. In such an arrangement, however, must the guide rod 11 with the shaft 2.1 of the gas exchange valve be connected via a corresponding coupling element, that the reciprocation of the anchor in the same way the gas exchange valve 2 transmits, however, a valve clearance allows.
- the electromagnets 3 and 4 of the actuator 1 are connected via a electronic engine control 9 according to the predetermined Control programs and depending on the engine control supplied operating data, such as speed, temperature, etc. driven.
- the actuator 1 is associated with a sensor 10, the detection allows the actuator functions.
- the sensor 10 is shown here schematically. Depending on the design of the sensor For example, the path of the armature 5 can be detected, so that the respective armature position of the engine control unit 9 transmitted can be. In the engine control 9 can then over appropriate arithmetic operations possibly also the anchor speed be determined so that, depending on the anchor position and / or depending on the anchor speed the energization of the two electromagnets 3, 4 controlled can be.
- the sensor 10 does not necessarily have, as shown, the extended guide rod 11 be assigned laterally, but It is also possible to have corresponding sensors in the area to arrange the pole face of the respective electromagnet or but also the side of the anchor 5 assign.
- the engine control 9 also has corresponding means for Detecting the current and the voltage for each Electromagnets 3 and 4 and to change the current flow and the voltage curve.
- the actuator 1 of the gas exchange valve 2 are fully variable, so for example, with regard to the beginning and the end of the Opening hours. Also a control in terms of height the opening stroke or the number of opening strokes during a closing time is possible.
- Fig. 2 the situation is for a "normal" valve discontinuation, d. H. without application of the method according to the invention, clarified. Shown here is a solid line the Speed of the anchor over the anchor way. It's on the far right the position for the open case is shown. As an an example An anchor stroke of 8mm was chosen here. At the far left 0,0 is the anchor position when resting on the pole face of the Closing magnets shown. A closing movement begins accordingly at the position on the far right in the picture at 8mm and speed 0. The speed now increases to about to reach the middle between the pole faces (at approx. 4mm).
- the anchor If the anchor is operated "normally" (unregulated), then has the valve especially with a clear valve clearance for example, 0.4mm (cold 0Motor) on arrival in the valve seat still a fairly high speed of about 1.1m / s. In this position, there is a separation of the armature movement from the valve movement. The valve is braked abruptly (broken line), the speed even goes down Zero, i. the valve bounces off again.
- the anchor will initially slow down, just before the impact but his speed increases and he joins in again a speed of about 0.5m / s.
- the anchor speed was meanwhile almost reduced to zero; at a further reduction of the capture current level would be the anchor So turn back before reaching the pole face, the system would fail.
- Fig. 3 the range of the valve touchdown and Ankerauf mecanics is shown enlarged. The separate movements of armature and valve are clearly visible. First, the armature and valve move together without valve play (curve part v A + V ). As soon as the valve hits its seat, the valve and armature separate and cause their own movements due to the valve clearance. (Valve broken line, anchor solid line).
- Fig. 4 are plotted over time the courses of the anchor position (solid line), the valve position (interrupted Line) and the stream (dash-dotted line). you recognizes in the current level, first, the maintenance of a constant Current value, however, at a great approximation of the anchor first breaks in, since the counter-induced voltage the Supply voltage exceeds. Following will become safe Catching the armature increases the current level for the current level. Because the anchor almost comes to rest, can the new Level can also be achieved because of the immobility the armature initially induced no further reverse voltage becomes.
- Fig. 5 the courses of armature travel and current over the Time played. Due to a regulation of the current flow can be a valve impact speed of about 0.2m / s can be achieved.
- the engine control 9 specifies the time when the movement process (valve closing) is initiated. This happens then by switching off the current through the closing coil in the current driver (power amplifier) 12 (here is no power supply to the Normally open coil).
- the current driver power amplifier
- sensor 10 plus conditioning circuit is now the current, for example, regulated so that the armature as far as possible adheres to a predefinable path-speed profile
- the position controller 14 serves this purpose.
- Fig. 7 is now shown that two control or control operations are provided.
- a valve position controller 14 designated block taken.
- This block can be identical to that block 14 in Fig. 6 designed be, but must take into account that the goal, with less Speed is achieved, not the pole surface but rather represents the valve seat, so position of Pole area plus valve clearance.
- valve break detector 17 that the valve has arrived in the seat and thus the current specification for the current driver (power amplifier) 12 switches to the output of the Anchor position controller 15.
- the valve break detector can its information from the sensor 10 of the position detector or refer to the output signal of the position detection 13, the separation of valve and armature from current and / or voltage curve conclude on the magnet or on a separate Detect sensor 16.
- Such a sensor can be simple consist of a contact that closes when separate the two electrically conductive parts (e.g., anchor bolts and valve stem). To problems with contamination of the However, bypassing contacts can also cause a capacity change be detected between the separating components; this is a non-conductive separation layer between the two Components required.
- the armature current controller can also function via a Run time control, since only the distance of the valve clearance still needs to be bridged. For this purpose, for example a specification of the current over time, and this depending on the existing valve clearance. So it will be also possible, instead of the armature position sensor, a valve position sensor to use because the information about the Anchor position is no longer so important.
- Fig. 8 shows an extension of the scheme, the particular then makes sense if the position detection with cost-effective Sensors should be done.
- the Path signal must be differentiated. This is however with a noisy or disturbed signal only very inadequate possible.
- the principle is possible Course of speed through the system within limits predictable.
- the model can now start at the beginning of the movement be initialized. It is known at this time the exact position, as well as the speed.
- the new information about the measured position 13 and possibly the of Model determined state variables flow into the observer (in the model) as recent inputs and can thus again to correct the currently issued sizes be used over path and speed. Also, one can Self-calibration (adaptation) of the observations contained in the observer Model done. For example, if the observer detects that the friction is greater than previously provided in the model, The corresponding size can be automatically reparameterized become.
- certain parameters can be used to improve model parameterization from the engine controller e.g. dependent on the load (gas forces at the exhaust valve) or the engine temperature (Estimate valve clearance, friction, etc.) fed into the model (see also Fig. 9, compound from 11 to 19).
- the quality of the controller itself can also be improved, if you can make a predictive estimate, which influence the measures introduced (change in the Current level) on the armature. This is gem.
- the controller 14 a "pre-estimation unit", a predictor 20 for Provided.
- This predictor 20 also contains again a model of the system and can thus estimate which Impact the measures will have. If the measures are considered insufficient or too strong, so the controller can still be corrected ("called back") become.
- the predictor 20 can also be designed to "learn” so that it automatically adjusts to changed model parameters adapts.
- the resolution limit may be one required analogue / digital conversion (quantization) be problematic. This resolution can be improved, before the conversion, the currently estimated value the position (e.g., observer 19) first from that of Sensor detected value is subtracted before digitizing the value becomes.
- Fig. 12 is an example of an embodiment of the position detection shown.
- the feedback signal 21, the digital provided by the observer becomes one D / A converter 22 supplied.
- the output of the D / A converter 22 thus returns the value currently determined by the observer for the position in analogue form.
- This value is with the help of a Subtractor 24 from the signal of a position sensor subtracted first from a conditioning circuit 23 has been raised to the correct level.
- Behind the subtractor is only the difference to the currently from the observer determined position.
- the signal range of this signal is naturally much smaller than that of the original one Position signal.
- the A / D converter then carries the difference signal between the determined by the observer and the current, new route information the observer 19 in turn in digital form. This can, if necessary, the new position information by adding the previously determined signal 21 and the new one Obtained difference information.
- the position and / or the speed of the armature is continuously measured by means of a sensor for controlling a soft impact and used for a closed-loop control of the actuator.
- the invention is based on the assumption that an effective closed-loop control of the armature or valve speed is only possible in the last part of the movement, ie shortly before reaching the respective end position, due to the dynamic properties of the system. Nevertheless, it is necessary to intervene at an earlier stage in order to achieve the required level of power at all.
- a nonlinear controller is preferably activated which switches the voltage on or off as a function of the deviation (v-v (s)) of the measured speed from a setpoint curve v (s).
- the switch-on position s on and the current threshold I max are expressed as a function of the measured supply voltage and the parameters which reflect the cylinder internal pressure. This can be done by a functional relationship or a map.
- the setpoint curve v (s) is in last part of the movement chosen flat, so that the scheme even with sensor errors a low touchdown speed can ensure.
- the setpoint curve v (s) runs at speeds less than 0.3 m / s, as in this case the response time of the scheme is short enough compared to the Dead time of the system to realize a closed-loop control.
- the flat setpoint curve is so extended so that it bridges the range of valve clearance can be, so that valve and anchor at low speed put on.
- this is the valve clearance in first part of the opening phase of the valve measured by the abrupt drop in the speed of the anchor on impact on the valve is detected.
- the extension of the slow motion section can thus be adapted to the current valve clearance become.
- the spring-mass system is so designed that the distance from the point of earliest possible achievement of equilibrium of forces up to the final position on NC and closing side is large enough to the valve clearance bridge and compensate for sensor errors.
- a low-turbulence anchor for example a sintered material used to the scope by lowering the maximum required current level for the balance of power to increase.
- the removal process by brief energization of the holding magnet designed so that a lower Maximum speed is reached and thus the waypoint, at which an equilibrium of forces can be achieved at the earliest, further away from the final position.
- a preferred Arrangement is the case mechanically extracted energy electrically fed back by a low-current armature and a corresponding timing stage, preferably in bridge circuit is used.
- the senor becomes a digital one Distance sensor used.
- the sensor raw signals with the help of a state observer so prepared that the quality of the path-speed and current signal is improved by information about the system behavior of the actuator can be used.
- the state observer uses
- the in the initial phase of the movement, d. H. when detaching the anchor, by measurement parameters obtained with the back pressure are correlated.
- the controller from a two- or three-point controller with a feedback branch, which contains a digital filter.
- This filter is preferably a low-pass filter with a suitably tuned Characteristics.
- the sampling time of the entire arrangement is preferably at 20 ⁇ s.
- the final stage is one switching power amplifier with rise and fall times below 5 ps.
- communication takes place between the impact control of the actuator and the driving Engine control such that the engine control information delivers over the expected cylinder internal pressure, in addition to the parameters determined by measurement, which correlates with the actual in-cylinder pressure are to be used.
- the impact control provides Information back to the engine control, such as Measured valve clearance, further parameters that match the actual Cylinder internal pressure are correlated, further parameters, which are correlated with the wear of the actuator, also parameters that correlate with the temperature of the actuator are.
- the invention in the presence of a hydraulic valve clearance compensation used.
- a hydraulic valve clearance compensation used.
- Another advantage is achieved when the measurement signal directly wins from a digital measurement process.
- the advantages are: no A / D conversion, low cost rugged electronics, Etc..
- Preferred measuring methods are those which are integrated Have component realized including signal conditioning.
- FIGS. 13 to 17 A path measurement by using a magnetoresistive measuring principle on the basis of Meßzellenmatrizen is based on the FIGS. 13 to 17 are shown and described.
- the magnetoresistive Matrix 30 (XMR matrix) can, as in Figs. 13 and 14 to recognize, be arranged.
- a position magnet 31 opens the guide rod 11 is attached.
- the evaluation circuit for the XMR matrix 30 outputs which sensor of the matrix of the Sensor line receives a maximum signal. This is the position with the position of the magnet 31 on the guide rod 11 is correlated, i. H. the current path position.
- FIG. 14 Another embodiment is shown in FIG. 14.
- the signal processing is limited to generating impulses when changing the maximum from one single sensor to the next.
- a preferred embodiment is the generation of a 29öbenen by 90 ° Pulse codes for direction detection.
- To increase the Resolution is a version with special magnet geometry suitable, such.
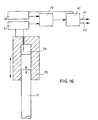
- a path and speed measurement by using a Microwave resonator measuring principle is based on the Fig. 16 to 18 shown and described.
- Fig. 16 shows an arrangement on top of an actuator can be put on.
- the valve stem is positively locked connected to the EMC anchor and the guide rod 11, so that the guide rod 11, the path position of the anchor plate reflects.
- the free end of the guide rod 11 projects into a resonator 35, which partially, preferably in the areas the guide rod in its linear motion not reached, is filled with a dielectric 36. It is an oscillator 37 via a coupling device 38 (capacitive or inductive) coupled to the resonator.
- This arrangement allows the anchor path as a frequency-determining Component of an oscillator 37 to use.
- a reference oscillator 38 may be in a mixer or a frequency demodulator 39 with subsequent filtering and signal conditioning 40 both path signal 41, and speed information 42 of the engine control are provided.
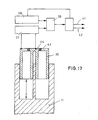
- Fig. 17 shows a similar arrangement, which also can be placed on top of an actuator.
- the guide rod 11 indicates the path position of the anchor plate.
- the guide rod 11 forms a displaceable part of a coaxial Resonators 35, whose fixed part with a Dielekrikum is filled.
- the guide rod 11 is the linear Move away and thus the reflection properties Such a coaxial resonator as a function of Change EMC armature movement.
- an insulation 43 is between center conductor 44 and housing the oscillator 37 to the fixed resonator part coupled.
- a reference oscillator 38 can in a Mixer or a frequency demodulator 39 with subsequent Filtering and signal conditioning both way signal 41 as well Speed information 42 are provided.
- a path and speed measurement by using a optical resonator principle is illustrated with reference to FIG. 21 and described.
- Fig. 18 shows an arrangement in which an optical variant a resonator measuring principle is also shown the guide rod 11 of an actuator can be attached.
- the guide rod 11 indicates the path position of the anchor plate at.
- To mediate the anchor position is located with the Shank connected to a magnetic assembly 45, which has the effect of the magnetic field to the zone 46 causes.
- the component 46 This represents an optical conductor whose optical Properties, preferably the refractive index, a function of Represents magnetic field strength. The whole arrangement is against Interference and external fields shielded.
- the optical conductor 46 is unilaterally by an optical Mirror 47 sealed, and coupling elements 48, for example a glass fiber and / or a polarization rotating Element and / or an optical impedance matching to semiconductor fiber connected via the current signal 50 and driver 51 is controlled.
- An HL laser 49 sends a beam in the direction of the sensor 52, on which also the second Ray of the HL laser 49 via element 48, 46, 47, 46, 48, 49 interfering impinges.
- the detector signal 53 thus measures Interference due to path length changes of the two Beam paths.
- a path length is now using magnetic field by magnet 45 by varying the refractive index in element 46 implicitly changed and thus forms a measure of the way the leadership rod 11.
- Another possibility of length change of element 46 when using optical materials, whose refractive index is not a function of the magnetic field strength results by bonding magnetostrictive material 46.1 with the optical element 46, so that by the magnetic field mechanical change in length of element 46 occurs.
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Valve Device For Special Equipments (AREA)
- Magnetically Actuated Valves (AREA)
- Output Control And Ontrol Of Special Type Engine (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Control Of Linear Motors (AREA)
Claims (15)
- Procédé de commande d'un actionneur électromagnétique (1) pour l'actionnement d'une soupape d'échange des gaz (2) sur un moteur à combustion interne à pistons, présentant un induit (5) en liaison active avec la soupape d'échange des gaz (2), qui est guidé de façon mobile selon un mouvement de va-et-vient entre deux électro-aimants (2, 3) à l'encontre de la force d'au moins un ressort de rappel, électro-aimants dont l'alimentation en courant est commandée à l'aide d'un dispositif de détection via une commande de moteur (9), de telle sorte que les aimants (2, 3) receveurs respectifs soient commandés de manière à ce que l'induit (5) soit guidé « délicatement » contre la face polaire, l'alimentation en courant de l'aimant receveur, pour compenser un jeu de soupape lors du mouvement de fermeture de la soupape d'échange des gaz (1), étant commandée de telle sorte que tout d'abord, la soupape vienne reposer sur son siège puis, après avoir parcouru le jeu de soupape, l'induit (5) vienne reposer doucement sur la face polaire avec une vitesse inférieure ou égale à 0,2 m/s, l'alimentation électrique étant réglée en fonction d'une détection de la position de l'induit (5) et de la soupape, de telle sorte que l'induit (5) conserve un profil de vitesse de course prédéterminé, caractérisé en ce que les informations détectées via la régulation de l'impact et relatives au mouvement de la soupape d'échange des gaz sont envoyées à la commande de moteur (9), une courbe de consigne v(s) du profil de vitesse de course prédéterminé étant choisie de manière à être plate dans la dernière partie du mouvement.
- Procédé selon la revendication 1, caractérisé en ce que la courbe de consigne plate s'étend jusqu'à ce qu'une zone d'un jeu de soupape soit dépassée, de telle sorte que la soupape et l'induit viennent respectivement reposer avec une vitesse réduite.
- Procédé selon la revendication 1 ou 2, caractérisé en ce que, pendant une phase de contact de l'induit au niveau de l'une des deux positions finales, on forme la valeur moyenne d'un signal de capteur caractérisant une position de l'induit.
- Procédé selon l'une des revendications 1 à 3, caractérisé en ce qu'en présence d'un jeu de soupape, lors de l'impact de la soupape sur son siège, l'alimentation en courant de l'aimant receveur passe en mode de « régulation d'induit » et l'induit est guidé séparément contre la face polaire.
- Procédé selon la revendication 4, caractérisé en ce que l'impact de la soupape sur son siège est détecté par un détecteur séparateur de soupape.
- Procédé selon l'une des revendications 1 à 5, caractérisé en ce que l'alimentation en courant de l'électro-aimant, pour le guidage de l'induit après l'impact de la soupape sur son siège, s'effectue en fonction du jeu de soupape donné sur une période pouvant être prédéterminée.
- Procédé selon l'une des revendications 1 à 6, caractérisé en ce que la détection de la position de la soupape et/ou de l'induit, réalisé par des capteurs, s'effectue par l'intermédiaire d'un modèle électronique de l'actionneur contenant les paramètres de fonctionnement essentiels de l'actionneur.
- Procédé selon l'une des revendications 1 à 7, caractérisé en ce que pour améliorer le paramétrage du modèle dans l'actionneur électronique modèle, des données de fonctionnement sont prélevées à partir de la commande de moteur.
- Procédé selon l'une des revendications 1 à 8, caractérisé en ce que les mesures de régulation respectivement mises en oeuvre sont contrôlées vis-à-vis de leur action future par l'intermédiaire d'une unité d'évaluation préalable contenant un modèle électronique de l'actionneur, et sont le cas échéant corrigées après ce contrôle.
- Procédé selon l'une des revendications 1 à 9, caractérisé en ce que les paramètres corrélés avec la pression régnant à l'intérieur des cylindres sont déterminés au début du mouvement de la soupape d'échange des gaz.
- Procédé selon l'une des revendications 1 à 10, caractérisé en ce que lors de la désactivation de la tension régnant lors de l'alimentation en courant au niveau des électro-aimants receveurs via un circuit à pont, l'énergie est réinjectée dans le circuit de bord.
- Procédé selon l'une des revendications 1 à 11, caractérisé en ce que respectivement lors de l'ouverture de la soupape, dans la première partie de la phase d'ouverture, le jeu de soupape est détecté en particulier via la détection de la perte de vitesse de l'induit lors de l'impact sur la soupape.
- Procédé selon l'une des revendications 1 à 12, caractérisé en ce que le système masse-ressort, formé par l'actionneur, le ressort de rappel et la soupape d'échange des gaz, est conçu de telle sorte que l'écart entre le point auquel a été atteint en tout premier lieu l'équilibre des forces et la position finale sur le côté d'ouverture et le côté de fermeture est suffisamment élevé pour dépasser le jeu de soupape et compenser les erreurs de détection.
- Procédé selon l'une des revendications 1 à 13, caractérisé en ce que pour la détection de la course et/ou de la vitesse de l'induit, des signaux numériques sont générés et sont mis à la disposition de la commande de moteur.
- Dispositif permettant de mettre en oeuvre un procédé doté des caractéristiques de la revendication 1 pour la commande d'un actionneur électromagnétique (1) pour l'actionnement d'une soupape d'échange des gaz (2) sur un moteur à combustion interne à pistons, présentant un induit (5) en liaison active, lors du fonctionnement, avec la soupape d'échange des gaz (2), qui est guidé de façon mobile selon un mouvement de va-et-vient entre deux électro-aimants (2, 3) à l'encontre de la force d'au moins un ressort de rappel, électro-aimants dont l'alimentation en courant est commandée à l'aide d'un dispositif de détection via une commande de moteur (9), la commande étant telle que les aimants respectivement receveurs (2, 3) guident l'induit (5) « délicatement » contre la face polaire, et une fente est présente entre la soupape et l'induit (5) dans une position de fermeture de la soupape, caractérisé en ce qu'un régulateur de position de l'induit est prévu pour que l'impact de l'induit s'effectue en douceur et un régulateur de position de la soupape est prévu pour que l'impact de la soupape s'effectue en douceur, et la commande présente une commutation entre les deux régulateurs de position lors du déplacement dans la position de fermeture, une courbe de consigne v(s) d'un profil de vitesse de course prédéterminé étant choisie de manière à être plate dans la dernière partie du mouvement.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19922970 | 1999-05-19 | ||
| DE19922970 | 1999-05-19 | ||
| PCT/EP2000/004463 WO2000071861A1 (fr) | 1999-05-19 | 2000-05-17 | Procede de commande d'un mecanisme de distribution electromagnetique pour soupape a gaz a deux voies dans un moteur a combustion interne a piston |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1099043A1 EP1099043A1 (fr) | 2001-05-16 |
| EP1099043B1 true EP1099043B1 (fr) | 2005-10-05 |
Family
ID=7908514
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP00935052A Expired - Lifetime EP1099043B1 (fr) | 1999-05-19 | 2000-05-17 | Procede de commande d'un mecanisme de distribution electromagnetique pour soupape a gaz a deux voies dans un moteur a combustion interne a piston |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US6474276B1 (fr) |
| EP (1) | EP1099043B1 (fr) |
| JP (1) | JP2003500587A (fr) |
| AT (1) | ATE306013T1 (fr) |
| DE (2) | DE10081384D2 (fr) |
| WO (1) | WO2000071861A1 (fr) |
Families Citing this family (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3508636B2 (ja) * | 1999-08-19 | 2004-03-22 | 日産自動車株式会社 | 電磁駆動吸排気弁の制御装置 |
| US6397797B1 (en) * | 2000-12-08 | 2002-06-04 | Ford Global Technologies, Inc. | Method of controlling valve landing in a camless engine |
| DE10107595A1 (de) * | 2001-02-17 | 2002-08-29 | Bayerische Motoren Werke Ag | Elektromagnetischer Ventiltrieb |
| JP4244526B2 (ja) * | 2001-03-13 | 2009-03-25 | トヨタ自動車株式会社 | 電磁駆動弁の制御装置及び制御方法 |
| DE10112999A1 (de) * | 2001-03-17 | 2002-09-19 | Bayerische Motoren Werke Ag | Verfahren beim Abstellen einer Brennkraftmaschine mit elektromagnetisch betätigten Gaswechselventilen |
| WO2002092971A1 (fr) * | 2001-05-14 | 2002-11-21 | Heinz Leiber | Systeme de commande electromagnetique |
| US6701876B2 (en) | 2001-09-27 | 2004-03-09 | Visteon Global Technologies, Inc. | Electromechanical engine valve actuator system with reduced armature impact |
| GB2383141B (en) * | 2001-12-11 | 2004-03-17 | Visteon Global Tech Inc | Method of controlling an electromagnetic valve actuator |
| US6644253B2 (en) * | 2001-12-11 | 2003-11-11 | Visteon Global Technologies, Inc. | Method of controlling an electromagnetic valve actuator |
| JP4055443B2 (ja) * | 2002-03-11 | 2008-03-05 | トヨタ自動車株式会社 | 電磁駆動弁制御装置 |
| FR2922941B1 (fr) * | 2007-10-31 | 2014-05-02 | Valeo Sys Controle Moteur Sas | Procede de determination d'un jeu de distribution au moyen de l'acceleration |
| US9228454B2 (en) | 2010-03-19 | 2016-01-05 | Eaton Coporation | Systems, methods and devices for rocker arm position sensing |
| US20190309663A9 (en) | 2008-07-22 | 2019-10-10 | Eaton Corporation | Development of a switching roller finger follower for cylinder deactivation in internal combustion engines |
| US9016252B2 (en) | 2008-07-22 | 2015-04-28 | Eaton Corporation | System to diagnose variable valve actuation malfunctions by monitoring fluid pressure in a hydraulic lash adjuster gallery |
| US9938865B2 (en) | 2008-07-22 | 2018-04-10 | Eaton Corporation | Development of a switching roller finger follower for cylinder deactivation in internal combustion engines |
| US8985074B2 (en) * | 2010-03-19 | 2015-03-24 | Eaton Corporation | Sensing and control of a variable valve actuation system |
| US9581058B2 (en) | 2010-08-13 | 2017-02-28 | Eaton Corporation | Development of a switching roller finger follower for cylinder deactivation in internal combustion engines |
| US9708942B2 (en) | 2010-03-19 | 2017-07-18 | Eaton Corporation | Rocker arm assembly and components therefor |
| US9291075B2 (en) | 2008-07-22 | 2016-03-22 | Eaton Corporation | System to diagnose variable valve actuation malfunctions by monitoring fluid pressure in a control gallery |
| US10415439B2 (en) | 2008-07-22 | 2019-09-17 | Eaton Intelligent Power Limited | Development of a switching roller finger follower for cylinder deactivation in internal combustion engines |
| US9284859B2 (en) | 2010-03-19 | 2016-03-15 | Eaton Corporation | Systems, methods, and devices for valve stem position sensing |
| DE102009002483A1 (de) * | 2009-04-20 | 2010-10-21 | Robert Bosch Gmbh | Verfahren zum Betreiben eines Einspritzventils |
| US9194261B2 (en) | 2011-03-18 | 2015-11-24 | Eaton Corporation | Custom VVA rocker arms for left hand and right hand orientations |
| US10087790B2 (en) | 2009-07-22 | 2018-10-02 | Eaton Corporation | Cylinder head arrangement for variable valve actuation rocker arm assemblies |
| US11181013B2 (en) | 2009-07-22 | 2021-11-23 | Eaton Intelligent Power Limited | Cylinder head arrangement for variable valve actuation rocker arm assemblies |
| US9885258B2 (en) | 2010-03-19 | 2018-02-06 | Eaton Corporation | Latch interface for a valve actuating device |
| US9874122B2 (en) | 2010-03-19 | 2018-01-23 | Eaton Corporation | Rocker assembly having improved durability |
| DE112015000034T5 (de) | 2014-03-03 | 2015-11-19 | Eaton Corporation | Ventilbetätigungsvorrichtung und Verfahren zu deren Herstellung |
| US9478339B2 (en) * | 2015-01-27 | 2016-10-25 | American Axle & Manufacturing, Inc. | Magnetically latching two position actuator and a clutched device having a magnetically latching two position actuator |
| DE102015222626A1 (de) * | 2015-11-17 | 2017-05-18 | Robert Bosch Gmbh | Vorrichtung zur Bestimmung einer Ventilstellung eines Einlassventils einer Brennkraftmaschine |
| FR3077844B1 (fr) * | 2018-02-13 | 2021-03-12 | Psa Automobiles Sa | Procede de controle d'un actionneur electromagnetique de soupape de moteur thermique |
| GB201917118D0 (en) * | 2019-11-25 | 2020-01-08 | Camcon Auto Ltd | A valve control system and methods of operation thereof |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3896346A (en) * | 1972-11-21 | 1975-07-22 | Electronic Camshaft Corp | High speed electromagnet control circuit |
| US4794890A (en) * | 1987-03-03 | 1989-01-03 | Magnavox Government And Industrial Electronics Company | Electromagnetic valve actuator |
| JP3134724B2 (ja) * | 1995-02-15 | 2001-02-13 | トヨタ自動車株式会社 | 内燃機関の弁駆動装置 |
| DE19529155B4 (de) | 1995-08-08 | 2007-05-24 | Fev Motorentechnik Gmbh | Verfahren zur Messung des Ventilspiels an einem durch einen elektromagnetischen Aktuator betätigten Gaswechselventil |
| DE19530121A1 (de) | 1995-08-16 | 1997-02-20 | Fev Motorentech Gmbh & Co Kg | Verfahren zur Reduzierung der Auftreffgeschwindigkeit eines Ankers an einem elektromagnetischen Aktuator |
| DE19723405A1 (de) | 1997-06-04 | 1998-12-10 | Fev Motorentech Gmbh & Co Kg | Verfahren zur Steuerung eines elektromagnetischen Ventilbetriebes für ein Gaswechselventil |
| DE19733106A1 (de) | 1997-07-31 | 1999-02-04 | Siemens Ag | Verfahren zum Steuern einer Brennkraftmaschine |
| DE19735375C2 (de) * | 1997-08-14 | 2002-04-04 | Siemens Ag | Magnetventil, insbesondere für Ein- und Auslaßventile von Brennkraftmaschinen |
| DE19739840C2 (de) | 1997-09-11 | 2002-11-28 | Daimler Chrysler Ag | Verfahren zur Steuerung einer elektromagnetisch betätigbaren Stellvorrichtung, insbesondere eines Ventils für Brennkraftmaschinen |
| JPH11117777A (ja) * | 1997-10-17 | 1999-04-27 | Hitachi Ltd | 内燃機関の制御方法 |
-
2000
- 2000-05-17 US US09/743,677 patent/US6474276B1/en not_active Expired - Fee Related
- 2000-05-17 AT AT00935052T patent/ATE306013T1/de not_active IP Right Cessation
- 2000-05-17 WO PCT/EP2000/004463 patent/WO2000071861A1/fr active IP Right Grant
- 2000-05-17 DE DE10081384T patent/DE10081384D2/de not_active Expired - Fee Related
- 2000-05-17 EP EP00935052A patent/EP1099043B1/fr not_active Expired - Lifetime
- 2000-05-17 JP JP2000620222A patent/JP2003500587A/ja not_active Withdrawn
- 2000-05-17 DE DE50011289T patent/DE50011289D1/de not_active Expired - Lifetime
Also Published As
| Publication number | Publication date |
|---|---|
| EP1099043A1 (fr) | 2001-05-16 |
| DE10081384D2 (de) | 2001-08-09 |
| US6474276B1 (en) | 2002-11-05 |
| WO2000071861A1 (fr) | 2000-11-30 |
| DE50011289D1 (de) | 2005-11-10 |
| ATE306013T1 (de) | 2005-10-15 |
| JP2003500587A (ja) | 2003-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1099043B1 (fr) | Procede de commande d'un mecanisme de distribution electromagnetique pour soupape a gaz a deux voies dans un moteur a combustion interne a piston | |
| DE19739840C2 (de) | Verfahren zur Steuerung einer elektromagnetisch betätigbaren Stellvorrichtung, insbesondere eines Ventils für Brennkraftmaschinen | |
| DE60102131T2 (de) | Verfahren zur Steuerung eines elektromagnetischen Ventilantriebes in einem nockenwellenlosen Motor | |
| EP0973178B1 (fr) | Procédé de commande du mouvement d'une armature d'un vérin électromagnétique | |
| DE3843138C2 (fr) | ||
| WO2000057135A1 (fr) | Procede de detection de la position et/ou de la vitesse de deplacement d'un element de reglage anime d'un mouvement de va-et-vient entre deux positions de commutation | |
| EP1050891B1 (fr) | Procédé de régulation de la vitesse d'impact de l'armature d'un actionneur électromagnétique par réglage du courant à l'aide d'un tableau de consultation | |
| DE19526681B4 (de) | Verfahren zur zeitgenauen Steuerung der Ankerbewegung eines elektromagnetisch betätigbaren Stellmittels | |
| WO1998038656A1 (fr) | Procede de reconnaissance de mouvements, utile notamment pour regler la vitesse d'impact d'un induit sur un element electromagnetique d'actionnement, et element d'actionnement pour mettre en oeuvre ce procede | |
| DE19960796C5 (de) | Elektromagnetisch betätigbare Ventilsteuervorrichtung und Verfahren zum Steuern eines elektromagnetisch betätigbaren Ventils | |
| DE3731983A1 (de) | Verfahren und stellregler zur adapitven stellregelung eines reibungsbehafteten elektro-mechanischen antriebs | |
| EP1165944A1 (fr) | Procede permettant de determiner la position d'un induit | |
| DE102014226505A1 (de) | Elektrische Bestimmung von Kenngrößen magnetischer Schaltventile | |
| EP1101016B1 (fr) | Procede de commande de la position de fin de course d'une valve de commutation des gaz actionnee par un actuateur electromagnetique dans un moteur a combustion interne | |
| DE19902664A1 (de) | Verfahren zur Regelung der Zufuhr elektrischer Energie zu einer elektromagnetischen Einrichtung und Verwendung eines Sliding-Mode-Reglers | |
| EP1101015B1 (fr) | Procede de commande d'un actionneur electromagnetique destine a actionner une soupape d'echange des gaz d'un moteur a pistons | |
| DE19825732A1 (de) | Verfahren zum Betrieb eines elektromagnetischen Aktuators unter Berücksichtigung der Ankerbewegung | |
| DE10025847B4 (de) | Verfahren zum Betreiben eines elektromagnetischen Aktuators und seine Verwendung | |
| DE10062107C5 (de) | Aktorregelung | |
| AT506758B1 (de) | Verfahren zur dämpfung von maschinenresonanzen | |
| DE102004054776B3 (de) | Verfahren zur Kalibrierung eines Wegsensors einer Drehaktuatorvorrichtung zur Ansteuerung eines Gaswechselventils einer Brennkraftmaschine | |
| EP1076908A1 (fr) | Procede de detection du deplacement d'un induit vers un actionneur electromagnetique | |
| DE19922969A1 (de) | Verfahren zum Betrieb eines elektromagnetischen Ventiltriebs zur Betätigung eines Gaswechselventils an einer Kolbenbrennkraftmaschine | |
| EP3667694B1 (fr) | Dispositif de détermination de la position de l'armature d'un relais | |
| DE19852230B4 (de) | Verfahren zur Ermittlung der Position eines zwischen zwei Magnetspulen oszillierend bewegten Ankers |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20010214 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;MK;RO;SI |
|
| 17Q | First examination report despatched |
Effective date: 20030211 |
|
| GRAP | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOSNIGR1 |
|
| GRAS | Grant fee paid |
Free format text: ORIGINAL CODE: EPIDOSNIGR3 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH CY DE DK ES FI FR GB GR IE IT LI LU MC NL PT SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20051005 Ref country code: GB Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20051005 Ref country code: IE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20051005 Ref country code: NL Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20051005 Ref country code: IT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT;WARNING: LAPSES OF ITALIAN PATENTS WITH EFFECTIVE DATE BEFORE 2007 MAY HAVE OCCURRED AT ANY TIME BEFORE 2007. THE CORRECT EFFECTIVE DATE MAY BE DIFFERENT FROM THE ONE RECORDED. Effective date: 20051005 |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: EP |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FG4D Free format text: LANGUAGE OF EP DOCUMENT: GERMAN |
|
| REF | Corresponds to: |
Ref document number: 50011289 Country of ref document: DE Date of ref document: 20051110 Kind code of ref document: P |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060105 Ref country code: SE Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060105 Ref country code: GR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060105 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060116 |
|
| NLV1 | Nl: lapsed or annulled due to failure to fulfill the requirements of art. 29p and 29m of the patents act | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20060306 |
|
| GBV | Gb: ep patent (uk) treated as always having been void in accordance with gb section 77(7)/1977 [no translation filed] |
Effective date: 20051005 |
|
| REG | Reference to a national code |
Ref country code: IE Ref legal event code: FD4D |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: AT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060517 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060531 Ref country code: MC Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060531 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060531 Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060531 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20060706 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20061020 |
|
| EN | Fr: translation not filed | ||
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| BERE | Be: lapsed |
Owner name: FEV MOTORENTECHNIK G.M.B.H. Effective date: 20060531 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060517 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20051005 Ref country code: CY Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20051005 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 50011289 Country of ref document: DE Representative=s name: PATENTANWAELTE MAXTON LANGMAACK & PARTNER, DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 50011289 Country of ref document: DE Representative=s name: DOMPATENT VON KREISLER SELTING WERNER - PARTNE, DE Effective date: 20120509 Ref country code: DE Ref legal event code: R082 Ref document number: 50011289 Country of ref document: DE Representative=s name: PATENTANWAELTE MAXTON LANGMAACK & PARTNER, DE Effective date: 20120509 Ref country code: DE Ref legal event code: R081 Ref document number: 50011289 Country of ref document: DE Owner name: FEV GMBH, DE Free format text: FORMER OWNER: FEV MOTORENTECHNIK GMBH, 52078 AACHEN, DE Effective date: 20120509 Ref country code: DE Ref legal event code: R082 Ref document number: 50011289 Country of ref document: DE Representative=s name: VON KREISLER SELTING WERNER - PARTNERSCHAFT VO, DE Effective date: 20120509 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20130527 Year of fee payment: 14 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 50011289 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R119 Ref document number: 50011289 Country of ref document: DE Effective date: 20141202 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 50011289 Country of ref document: DE Representative=s name: DOMPATENT VON KREISLER SELTING WERNER - PARTNE, DE Ref country code: DE Ref legal event code: R082 Ref document number: 50011289 Country of ref document: DE Representative=s name: VON KREISLER SELTING WERNER - PARTNERSCHAFT VO, DE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20141202 |