EP1064111B1 - Verfahren zum steuern, überwachen und überprüfen eines umformvorganges einer umformmaschine, insbesondere nietmaschine - Google Patents
Verfahren zum steuern, überwachen und überprüfen eines umformvorganges einer umformmaschine, insbesondere nietmaschine Download PDFInfo
- Publication number
- EP1064111B1 EP1064111B1 EP99907589A EP99907589A EP1064111B1 EP 1064111 B1 EP1064111 B1 EP 1064111B1 EP 99907589 A EP99907589 A EP 99907589A EP 99907589 A EP99907589 A EP 99907589A EP 1064111 B1 EP1064111 B1 EP 1064111B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- reshaping
- beginning
- pressure
- force
- piston chamber
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images

Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J15/00—Riveting
- B21J15/10—Riveting machines
- B21J15/28—Control devices specially adapted to riveting machines not restricted to one of the preceding subgroups
- B21J15/285—Control devices specially adapted to riveting machines not restricted to one of the preceding subgroups for controlling the rivet upset cycle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J15/00—Riveting
- B21J15/10—Riveting machines
- B21J15/12—Riveting machines with tools or tool parts having a movement additional to the feed movement, e.g. spin
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21J—FORGING; HAMMERING; PRESSING METAL; RIVETING; FORGE FURNACES
- B21J9/00—Forging presses
- B21J9/10—Drives for forging presses
- B21J9/20—Control devices specially adapted to forging presses not restricted to one of the preceding subgroups
Definitions
- the present invention relates to a method for Controlling, monitoring and checking a forming process a forming machine, in particular a riveting machine, on one Workpiece by means of a piston, which against the Workpiece is moved, with an upper piston surface and / or a lower piston surface for moving the piston is pressurized and a forming machine to carry out the above Process.
- riveting machines are in the stand known in the most varied of forms and designs and common. They are primarily used to mechanical mechanical material deformations, in particular also rivets. Such should. Machines can be integrated into automation processes can. Essentially, this is the Production of riveted joints using a riveting machine cold deformations, because two Parts can be connected together.
- EP 0 699 490 A1 describes a device for Verification of material deformations known, being about two different displacement sensor arrangements and via push buttons if necessary, a deviation is determined.
- the disadvantage here is that such a device is complex and complex manufactured and no exact determination of a rivet start is possible.
- DE 37 15 905 C2 describes a method for mechanical production of riveted joints and a riveting machine for performing the method known, at which opposes a striker from a given zero position a workpiece is moved. This shifting to one Workpiece is made with a measuring force that is less than the force required to deform the rivet. The feed distance of the striker caused by the measuring force is measured and is used as an actual value with a setpoint compared. The disadvantage of this is that not with full Feed force can be applied to the rivet. A Monitoring of the complete riveting process is not here possible.
- EP 0 549 793 A1 describes a method for plastic deformation of workpieces, the Feed rate of the striker is controllable.
- the present invention is based on the object Procedures for controlling, monitoring and reviewing a Forming process and to create a forming machine at which a determination of a start of forming or Rivet start is exactly possible. After that, exact Conclusions about faulty forming processes may be possible. Furthermore, significant manufacturing costs should such a forming machine can be reduced. It is said to be very easy and simple with increasing the forming quality control.
- the solution to this task is that when the Piston, especially the striker, on the workpiece of Start of forming, especially start of riveting, by changing the Forming force is determined, this forming force with With the help of a differential pressure measurement through determined pressure in the upper piston chamber minus the determined pressure in the lower Piston space is calculated.
- the sensor element should preferably be in the machine housing provided near the upper and / or lower piston space his. This is connected to a control device, which evaluates the data.
- the piston permanently with full feed and if necessary constant feed force when forming on the workpiece can be driven. Only the pressure change immediately when the riveting tool hits the Workpiece displayed and can via a distance measuring device then a predefined path, in particular a forming path continue until the predetermined path is reached within a certain time. on the other hand can also with a given feed or forming force the piston against the workpiece for a certain time be moved until after a certain forming or Comparison time, the forming is carried out as desired.
- predetermined comparison parameters which, for example, by Experiment can be determined, can be exactly determine whether the forming has been carried out as desired. It can be determined exactly, for example, whether the rivet was sufficient or not a rivet at all, or whether the forming time or the forming path was carried out exactly. This is through the Determination of the exact start of forming possible.
- the present invention is a method as well as a forming machine, with which very exactly one rivet start or forming start can be determined can.
- the time for a specific forming path as Comparison criterion can be used to make a statement faulty or non-faulty forming receive.
- the time is predetermined and the forming path covered during this time as Comparison criterion for determining a forming condition is used. This ensures that too an automated forming process is constantly monitored and can be controlled.
- Another advantage is that a very precise error detection or a determination of the cause of the error is always preferred by two comparison variables with a given one Parameter is made to rule out two Mistakes together with reverse value each other compensate and thus a detection of an error prevent.
- the determinable forming work per unit of time also leaves an exact assessment of the riveting process and in particular an exact conclusion on the strength properties of the formed workpiece.
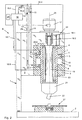
- Figure 1 is a forming machine, in particular Riveting machine R shown, the main components a conventional riveting machine, as in the EP 0 699 490 A1 is shown. It is explicitly based on referred to this prior art because essentially there all the components of a conventional riveting machine are described in detail. Another description the individual components are therefore dispensed with.
- a forming machine R only has a dashed line here indicated machine frame 1, which only one has indicated vertical support arm, in which preferably adjoins a support surface 2 at right angles.
- the support surface 2 carries the workpieces to be machined 27. These are not numbered in detail here.
- To the Machine frame 1 and especially on the vertical Carrying arm is a machine housing 3, which in Interior is hollow.
- a machine housing 3 In the machine housing 3 is a preferably hollow slidable pneumatic piston 4 arranged. Protrudes from the piston 4 preferably a projecting flange 5 towards the outside, which is guided in a cavity 6 of the machine housing 3 is.
- the cavity 6 is through the protruding flange 5 in an upper piston chamber 7 and lower piston chamber 8 divided.
- the projecting flange 5 accordingly has a upper piston chamber 7 facing upper piston surface 9 and a lower piston surface 10.
- a control valve 13, 14, in particular a throttle is used, the connecting lines 15.1, 15.2 with a Control device 16 is connected.
- Another Connection line 15.3 provides the connection between a drive motor 17, in particular an electric motor. This can also be designed as a hydraulic motor.
- the Electric motor drives a sleeve 18.1 in which changeable a projecting end 18.2 one Drive shaft 19 is mounted.
- the drive shaft 19 is via only indicated bearings in a cavity 20 of the Piston 4 rotatably mounted.
- the rivet head 21 also serves as a tool holder. This can, for example, as Riveting tools include a striker 22.
- a displacement measuring device 24 which, via a further connecting line 15.4 the control device 16 is connected.
- This Control device 16 takes over all regulations and Controls that operate the R required are.
- the data required for this can be obtained via a Computer 25 entered and during or after a Work process evaluated and output there. This is only an example here. In particular, can such a control device 16 into an existing one Production can be integrated in order to be fully automatic to operate the corresponding riveting machine R.
- a Sensor element 26.1 in the pressure line 11 and Sensor element 26.2 inserted into the vent line 12 is.
- the sensor elements 26.1, 26.2 are preferably close of the machine housing 3 in the pressure line 11 or Vent line 12 used.
- the sensor elements 26.1, 26.2 are also via connecting lines 15.5, 15.6 connected to the control device 16. It is important here also that the sensor elements 26.1, 26.2 between the Control valves 13, 14 and the machine housing 3 in the Pressure line 26.1 or vent line 26.2 used are.
- the sensor elements 26.1, 26.2 which are preferably as Pressure sensors, but also designed as a pressure transmitter are a very precise change in pressure in the Determine pressure line 11 or vent line 12 if when moving the piston 4 to a machined Workpiece 27 strikes. Immediately upon hitting the Workpiece 27, for example on a rivet, is in the pressure line 11 causes a pressure change that is beyond the Sensor elements 26.1, 26.2 and accordingly in the Vent line 26.2 is registered immediately. This Pressure change causes a start or an Displacement of the zero point can be calculated.
- the exact determination of the start of the rivet is required in order to for the optimum forming process, the exact forming path required to be able to determine. If the start of the rivet is known, it can via further method via the path measuring device 24 Forming path can be determined exactly. This can also be done by continuous procedure and timing can be possible.
- the advantage here is that an exact determination of the Forming begins by changing the pressure in the Sensor elements 26.1, 26.2 can be detected.
- a forming machine R 1 in particular a riveting machine, in which the sensor elements 26.3, 26.4 are inserted into an upper piston chamber 7 and a lower piston chamber 8.
- a throttle valve 29, which is adjustable, is preferably inserted into the vent line 12. This can be connected to the control device 16. As a result, the movement of the piston 4 can be damped in particular into a lower position. A hard impact of the piston after the downward movement is prevented by this throttle valve 29.
- the spindle advance can be regulated by means of the throttle valve 29, it also being possible to change the speed of the travel path of the spindle or of the piston 4.
- the sensor elements 26.3, 26.4 are over the Connection lines 15.7, 15.8 with the control device 16 connected.
- the change in pressure can precisely determine the start of the rivet but also the one calculated from the pressure change Forming force.
- the riveting results can be exactly check and determine.
- the forming path is known or specified, then through additional time comparison influence on the quality of the forming process. Will be within one certain time a certain predetermined way the reshaping or riveting is completed successful. So that a comparison is possible, for example Trial determined a certain time, a time tolerance measure set to a positive or negative riveting result detect.
Description
| 1 | Maschinengestell | 34 | 67 | ||
| 2 | Auflagefläche | 35 | 68 | ||
| 3 | Maschinengehäuse | 36 | 69 | ||
| 4 | Kolben | 37 | 70 | ||
| 5 | Flansch | 38 | 71 | ||
| 6 | Hohlraum | 39 | 72 | ||
| 7 | oberer Kolbenraum | 40 | 73 | ||
| 8 | unterer Kolbenraum | 41 | 74 | ||
| 9 | obere Kolbenfläche | 42 | 75 | ||
| 10 | untere Kolbenfläche | 43 | 76 | ||
| 11 | Druckleitung | 44 | 77 | ||
| 12 | Entlüftungsleitung | 45 | 78 | ||
| 13 | Steuerventil | 46 | 79 | ||
| 14 | Steuerventil | 47 | |||
| 15 | Verbindungsleitung | 48 | |||
| 16 | Steuereinrichtung | 49 | |||
| 17 | Antriebsmotor | 50 | |||
| 18.1 | Hülse | 51 | |||
| 18.2 | Ende | 52 | R | Umformmaschine Nietmaschine | |
| 19 | Antriebswelle | 53 | R1 | Umformmaschine Nietmaschine | |
| 20 | Hohlraum | 54 | |||
| 21 | Nietkopf | 55 | |||
| 22 | Döpper | 56 | |||
| 23 | Z-Achse | 57 | |||
| 24 | Wegmesseinrichtung | 58 | |||
| 25 | Rechner | 59 | |||
| 26 | Sensorelement | 60 | |||
| 27 | Werkstück | 61 | |||
| 29 | Drosselventil | 62 | |||
| 30 | 63 | ||||
| 31 | 64 | ||||
| 32 | 65 | ||||
| 33 | 66 |
Claims (19)
- Verfahren zum Steuern, Überwachen und Überprüfen eines Umformvorganges einer Umformmaschine, insbesondere Nietmaschine (R), an einem Werkstück (27) mittels eines Kolbens (4), welcher gegen das Werkstück (27) verfahren wird, wobei eine obere Kolbenfläche (9) und/oder eine untere Kolbenfläche (10) zum Bewegen des Kolbens (4) mit Druck beaufschlagt wird,
dadurch gekennzeichnet, dass beim Auftreffen des Kolbens (4), insbesondere des Döppers (22), auf das Werkstück (27) der Umformbeginn, insbesondere Nietbeginn, über die Änderung der Umformkraft bestimmt wird, wobei diese Umformkraft mit Hilfe einer Differenzdruckmessung durch ermittelten Druck im oberen Kolbenraum (7) abzüglich ermittelten Druck im unteren Kolbenraum (8) berechnet wird. - Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass während des gesamten Umformprozesses mit Hilfe einer Differenzdruckmessung durch ermittelten Druck im oberen Kolbenraum (7) abzüglich ermittelten Druck im unteren Kolbenraum (8) eine Umformkraft errechnet und/oder angezeigt wird.
- Verfahren nach Anspruch 1 oder 2, dadurch gekennzeichnet, dass die Drücke im oberen und unteren Kolbenraum (7, 8) umittelbar im oberen und unteren Kolbenraum (7, 8) gemessen werden.
- Verfahren nach Anspruch 1, dadurch gekennzeichnet, dass die Drücke im oberen und unteren Kolbenraum unmittelbar in einer Druckleitung (11) und einer Entlüftungsleitung (12) gemessen werden.
- Verfahren nach wenigstens einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, dass die Drücke im oberen und unteren Kolbenraum mit zumindest einem Sensorelement (26.1 bis 26.4) ermittelt werden.
- Verfahren nach wenigstens einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, dass durch die Ermittlung der Kraftänderungen und Bestimmung des Umformbeginnes, der Beginn des Umformweges und/oder der Beginn der Umformzeit ermittelt wird.
- Verfahren nach Anspruch 6, dadurch gekennzeichnet, dass durch die Ermittlung des Umformbeginnes ein Nullpunkt auf einen Werkstückanfang verschoben wird.
- Verfahren nach Anspruch 7, dadurch gekennzeichnet, dass durch die Verschiebung und Ermittlung des Nullpunktes als Umformbeginn über eine vorherbestimmbare Dauer und/oder einen vorherbestimmbaren Umformweg und/oder eine vorherbestimmbare Umformkraft, die Verformung bestimmt wird.
- Verfahren nach Anspruch 8, dadurch gekennzeichnet, dass durch Abweichung der vorherbestimmten Parameter oder Relationen dieser Parameter, wie Umformbeginn, -zeit oder - kraft je Umformweg eine ggf. fehlerhafte Umformung, insbesondere Nietung, ermittelt wird.
- Verfahren nach wenigstens einem der Ansprüche 5 bis 9, dadurch gekennzeichnet, dass nach Bestimmung des Umformbeginnes bzw. Prozessbeginnes ein vorgegebener Umformweg verfahren wird und über einen Zeitvergleich eine ggf. fehlerhafte Umformung bestimmt wird.
- Verfahren nach wenigstens einem der Ansprüche 5 bis 10, dadurch gekennzeichnet, dass nach Bestimmung eines Umformbeginnes, bzw. Prozessbeginnes bei einer vorgegebenen Zeit, ein verfahrener Weg als Vergleichsparameter zur Bestimmung einer ggf. fehlerhaften Umformung, ggf. im Wegtoleranzbereich ermittelt wird.
- Verfahren nach wenigstens einem der Ansprüche 5 bis 11, dadurch gekennzeichnet, dass nach Bestimmung eines Umformbeginnes bzw. Prozessbeginnes bei einem vorgegebenen Weg, ein Kraftfenster als Vergleichsparameter zur Bestimmung einer ggfs. fehlerhaften Umformung ggfs. im Krafttoleranzbereich ermittelt wird.
- Verfahren nach wenigsens einem der Ansprüche 5 bis 12, dadurch gekennzeichnet, dass nach Bestimmung eines Umformbeginnes, die Umformarbeit, ggfs die Umformarbeit je Zeiteinheit, als Vergleichsparameter zur Bestimmung einer fehlerhaften Umformung ggfs. im Arbeitstoleranzbereich ermittelt wird.
- Umformmaschine, insbesondere Nietmaschine, mit einem in einer Z-Achse (23) bewegbaren Kolben (4), welcher mit Druck gegen ein Werkstück (27) verfahrbar in einem Maschinengehäuse (3) geführt ist und der Kolben (4), insbesondere dessen Flansch (5), in einem Hohlraum (6), welcher in einen oberen Kolbenraum (7) und einen unteren Kolbenraum (8) unterteilt ist, verfahrbar ist, wobei in den oberen Kolbenraum (7) eine Druckleitung (11) und in den unteren Kolbenraum (8) eine Entlüftungsleitung (12) einmündet, dadurch gekennzeichnet, dass zur Ermittlung eines Differenzdruckes und/oder einer Kraftänderung beim Auftreffen des Kolbens (4), insbesondere Döppers (22), auf ein Werkstück (27), jeder Leitung (11, 12) und/oder jedem Kolbenraum (7, 8), zumindest jeweils ein Sensorelement (26.1 bis 26.4) zugeordnet ist, mit welchen eine Druckdifferenz zwischen den Drücken in der Druckleitung (11) und der Entlüftungsleitung (12) und/oder zwischen den Drücken in dem oberen Kolbenraum (7) und dem unteren Kolbenraum (8) ermittelbar ist.
- Umformmaschine nach Anspruch 14, dadurch gekennzeichnet, dass zur Ermittlung einer Druckdifferenz und/oder Kraftänderung und/oder Änderung der Umformarbeit, ggf. je Zeiteinheit, zumindest ein Sensorelement (26.1 bis 26.4) zumindest jeder Leitung (11, 12) zugeordnet ist.
- Umformmaschine nach Anspruch 14 oder 15, dadurch gekennzeichnet, dass zur Ermittlung einer Druckdifferenz und/oder Kraftänderung beim Auftreffen des Kolbens (4) auf ein Werkstück (27) zumindest ein Sensorelement (26.1 bis 26.4) in der Druckleitung (11), ein weiteres in der Entlüftungsleitung (12) und/oder im oberen Kolbenraum (7), ein weiteres im unteren Kolbenraum (8) vorgesehen ist.
- Umformmaschine nach wenigstens einem der Ansprüche 14 bis 16, dadurch gekennzeichnet, dass das zumindest eine Sensorelement (26.1, 26.2) in jeder Leitung (11, 12) zwischen einem Steuerventil (13, 14) und dem Kolbenraum (7, 8) nahe an diesem vorgesehen ist.
- Umformmaschine nach wenigstens einem der Ansprüche 14 bis 17, dadurch gekennzeichnet, dass die Sensorelemente (26.1 bis 26.4) mit einer Steuereinrichtung (16) verbunden sind.
- Umformmaschine nach wenigstens einem der Ansprüche 14 bis 18, dadurch gekennzeichnet, dass der Kolben (4) entlang einer Z-Achse (23) achsial verfahrbar ist.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19812133A DE19812133A1 (de) | 1998-03-20 | 1998-03-20 | Verfahren zum Steuern, Überwachen und Überprüfen eines Umformvorganges einer Umformmaschine, insbesondere Nietmaschine |
| DE19812133 | 1998-03-20 | ||
| PCT/EP1999/001365 WO1999048633A1 (de) | 1998-03-20 | 1999-03-03 | Verfahren zum steuern, überwachen und überprüfen eines umformvorganges einer umformmaschine, insbesondere nietmaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP1064111A1 EP1064111A1 (de) | 2001-01-03 |
| EP1064111B1 true EP1064111B1 (de) | 2002-10-16 |
Family
ID=7861581
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP99907589A Expired - Lifetime EP1064111B1 (de) | 1998-03-20 | 1999-03-03 | Verfahren zum steuern, überwachen und überprüfen eines umformvorganges einer umformmaschine, insbesondere nietmaschine |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US6089062A (de) |
| EP (1) | EP1064111B1 (de) |
| AU (1) | AU2727699A (de) |
| BR (1) | BR9908917A (de) |
| CA (1) | CA2325040A1 (de) |
| CZ (1) | CZ12039U1 (de) |
| DE (2) | DE19812133A1 (de) |
| ES (1) | ES2185320T3 (de) |
| WO (1) | WO1999048633A1 (de) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9015920B2 (en) * | 1997-07-21 | 2015-04-28 | Newfrey Llc | Riveting system and process for forming a riveted joint |
| US6276050B1 (en) * | 1998-07-20 | 2001-08-21 | Emhart Inc. | Riveting system and process for forming a riveted joint |
| DE19846463C2 (de) * | 1998-10-08 | 2002-10-31 | Masch Und Werkzeugbau Dorothe | Verfahren zum Steuern einer Nietvorrichtung und eine solche Vorrichtung |
| US6240613B1 (en) * | 1998-10-21 | 2001-06-05 | Emhart Inc. | Rivet setting tool cycle control |
| DE19927103A1 (de) * | 1999-06-14 | 2000-12-21 | Univ Dresden Tech | Verfahren, Vorrichtung sowie Hilfsfügeteil zum mechanischen Fügen |
| DE19950884A1 (de) * | 1999-10-22 | 2001-04-26 | Wella Ag | Kombinationsverpackung |
| WO2004074695A2 (en) * | 2003-02-14 | 2004-09-02 | Newfrey Llc | Automated monitoring for clinching joints |
| ES2234394B1 (es) * | 2003-04-30 | 2006-03-16 | Aguirregomezcorta Y Mendicute, S.A. | Proceso de remachado. |
| US7313852B2 (en) * | 2003-12-23 | 2008-01-01 | Magna Structural Systems, Inc. | Method of forming a rivet using a riveting apparatus |
| EP2305396A3 (de) * | 2005-06-27 | 2011-06-08 | MS Gerätebau GmbH | Modular aufgebautes Nietsetzgerät |
| JP2007007716A (ja) * | 2005-07-04 | 2007-01-18 | Fanuc Ltd | ダイクッション機構の衝突判定装置および衝突判定システム |
| DE102010051978B3 (de) * | 2010-11-19 | 2012-03-08 | Audi Ag | Vorrichtung zur Bestimmung von Niederhaltekräften |
| CN102513494A (zh) * | 2011-11-30 | 2012-06-27 | 苏州工业园区高登威科技有限公司 | 铆接方法 |
| CN102513496A (zh) * | 2011-11-30 | 2012-06-27 | 苏州工业园区高登威科技有限公司 | 铆接机标定方法 |
| US9027220B2 (en) | 2012-08-07 | 2015-05-12 | Newfrey Llc | Rivet setting machine |
| CN103157743B (zh) * | 2013-04-09 | 2015-11-25 | 苏州工业职业技术学院 | 用于铆压装配机的侧铆压机构 |
| DE102013111584A1 (de) | 2013-10-21 | 2015-05-07 | Federal-Mogul Bremsbelag Gmbh | Trägerkörper für einen Bremsbelag einer Scheibenbremse mit Tilgermasse zur Veränderung der Schwingung |
| DE102013111594B4 (de) | 2013-10-21 | 2015-04-30 | Federal-Mogul Bremsbelag Gmbh | Verfahren zur Herstellung eines Trägerkörpers mit Tilgermasse zur Veränderung der Schwingung für einen Bremsbelag einer Scheibenbremse |
| DE102014223034A1 (de) * | 2014-11-12 | 2016-05-12 | Robert Bosch Gmbh | Werkzeug und verfahren zur behandlung eines werkstücks mit einem werkzeugelement eines werkzeugs |
| CN105057398A (zh) * | 2015-09-29 | 2015-11-18 | 梧州恒声电子科技有限公司 | 一种防端子铆反检测夹具 |
| CH712279A1 (de) * | 2016-03-18 | 2017-09-29 | Baltec Maschb Ag | Vorrichtung zur Beaufschlagung eines Verbindungselements mit einer Beaufschlagungskraft. |
| CN108380696A (zh) * | 2018-01-23 | 2018-08-10 | 深圳市炫硕智造技术有限公司 | 整形检测装置 |
| US11273931B2 (en) * | 2018-09-24 | 2022-03-15 | The Boeing Company | Sensor based control of swage tools |
| US11052454B2 (en) | 2019-07-23 | 2021-07-06 | The Boeing Company | Dynamic collar swage conformance checking based on swage tool parameters |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3136433A1 (de) * | 1981-09-14 | 1983-03-31 | Klaus Prof. Dr.-Ing. 4006 Erkrath Brankamp | Verfahren zum feststellen und erkennen von abweichungen zyklisch wiederkehrender vorgaenge zum umformen von werkstuecken von einem normalverlauf |
| DE3715905A1 (de) * | 1987-05-13 | 1988-12-01 | Masch Und Werkzeugbau D Friedr | Verfahren zur qualitaetssicherung von nietverbindungen und maschine zur durchfuehrung des verfahrens |
| CA1335638C (en) * | 1987-12-04 | 1995-05-23 | Kinshirou Naito | Method and device for controlling the stroke of a press |
| DE4100410C2 (de) * | 1991-01-09 | 2000-07-06 | Bosch Gmbh Robert | Verfahren zur Überwachung der Qualität einer Preßverbindung |
| WO1993001905A1 (fr) * | 1991-07-18 | 1993-02-04 | Aida Engineering Ltd. | Procede de formage d'objets a l'etat plastique |
| DE19619468C1 (de) * | 1996-05-14 | 1997-08-21 | Siemens Ag | Verfahren zum Auslösen eines Rückhaltemittels zum Seitenaufprallschutz in einem Fahrzeug |
| ES2138418T3 (es) * | 1996-07-25 | 2000-01-01 | Bodmer Kusnacht Ag | Dispositivo de comprobacion especialmente para maquinas conformadoras. |
| DE19635184A1 (de) * | 1996-08-30 | 1998-03-05 | Baltec Maschinenbau Ag Pfaeffi | Vorrichtung zum Steuern einer Hubbewegung einer Nietmaschine |
| DE19701282C2 (de) * | 1997-01-16 | 2002-10-24 | Schuler Pressen Gmbh & Co | Presse mit Sicherheitsabschaltung |
-
1998
- 1998-03-20 DE DE19812133A patent/DE19812133A1/de not_active Withdrawn
- 1998-05-13 US US09/078,107 patent/US6089062A/en not_active Expired - Lifetime
-
1999
- 1999-03-03 WO PCT/EP1999/001365 patent/WO1999048633A1/de active IP Right Grant
- 1999-03-03 CA CA002325040A patent/CA2325040A1/en not_active Abandoned
- 1999-03-03 EP EP99907589A patent/EP1064111B1/de not_active Expired - Lifetime
- 1999-03-03 AU AU27276/99A patent/AU2727699A/en not_active Abandoned
- 1999-03-03 BR BR9908917-3A patent/BR9908917A/pt not_active IP Right Cessation
- 1999-03-03 DE DE59903091T patent/DE59903091D1/de not_active Expired - Lifetime
- 1999-03-03 ES ES99907589T patent/ES2185320T3/es not_active Expired - Lifetime
- 1999-03-03 CZ CZ200212704U patent/CZ12039U1/cs not_active IP Right Cessation
Also Published As
| Publication number | Publication date |
|---|---|
| DE59903091D1 (de) | 2002-11-21 |
| CZ12039U1 (cs) | 2002-03-04 |
| DE19812133A1 (de) | 1999-09-23 |
| BR9908917A (pt) | 2000-11-21 |
| CA2325040A1 (en) | 1999-09-30 |
| US6089062A (en) | 2000-07-18 |
| EP1064111A1 (de) | 2001-01-03 |
| WO1999048633A1 (de) | 1999-09-30 |
| AU2727699A (en) | 1999-10-18 |
| ES2185320T3 (es) | 2003-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP1064111B1 (de) | Verfahren zum steuern, überwachen und überprüfen eines umformvorganges einer umformmaschine, insbesondere nietmaschine | |
| DE102011009379B4 (de) | Punktschweisssystem und Positionserkennungsverfahren für ein zu schweißendes Werkstück | |
| EP0779849B1 (de) | Verfahren und vorrichtung zur erfassung und kompensation von füge- und verschleissfehlern beim feinbohren | |
| DE102004012294B4 (de) | Hochgeschwindigkeitsantriebsverfahren und -system für Druckzylinder | |
| WO2003008145A1 (de) | Widerstandsschweisseinrichtung und steuerverfahren | |
| EP2110266B1 (de) | Verfahren und Vorrichtung zur Erzeugung eines Zeichens in einer Werkstückoberfläche durch Prägen | |
| DE102018000022A1 (de) | Verfahren zum Richten von Rundlauf- oder Gradheitsfehlern an langgestreckten Werkstücken, sowie hierfür Messvorrichtung, Richtmaschine und Richtsystem | |
| DE2346796A1 (de) | Automatisches richtverfahren und richtmaschine dafuer mit mehreren richtstellen | |
| EP3151987A1 (de) | Radialpresse | |
| DE4040300A1 (de) | Drueckmaschine mit wenigstens einem rollenhalter | |
| EP2319637A2 (de) | Verfahren und Vorrichtung zur automatischen Herstellung einer Nietverbindung | |
| EP0732194B1 (de) | Verfahren und Vorrichtung zur Messung und Regelung der Höhenstellung des Stössels einer schnellaufenden Schnittpresse | |
| DE3916014C2 (de) | ||
| EP0820823B1 (de) | Überprüfungsvorrichtung, insbesondere für Verformungsmaschinen | |
| DE19825922C2 (de) | Linsenrad-Schleifmaschine | |
| DE102016204572A1 (de) | Umformmaschine und Verfahren zur Positionskorrektur des Schlittenaggregates einer solchen Umformmaschine | |
| EP0346288B1 (de) | Verfahren und Einrichtung zum berührungslosen Ausmessen eines Werkstückes | |
| EP0699490B1 (de) | Überprüfungsvorrichtung, insbesondere für Verformungsmaschinen | |
| DE4132011A1 (de) | Vorrichtung zur steuerung einer schlagenden umformmaschine bezueglich werkstueck-dicke | |
| AT523205B1 (de) | Roboter-Bearbeitungskopf sowie Verfahren zur Bearbeitung eines Werkstücks mit einem Bearbeitungskopf | |
| DE4301309C2 (de) | Schneidpresse | |
| EP1635972B1 (de) | Verfahren und vorrichtung zum umformen von werkstücken | |
| EP0826443A2 (de) | Vorrichtung zum Steuern einer Hubbewegung einer Nietmaschine | |
| WO2004052590A1 (de) | Bohranordnung | |
| DE10331127A1 (de) | Verfahren zur Beeinflussung eines Biegeprozesses |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 20000823 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): CH DE ES FR GB IT LI |
|
| 17Q | First examination report despatched |
Effective date: 20010508 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: BALTEC MASCHINENBAU AG |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH DE ES FR GB IT LI |
|
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: FG4D Free format text: NOT ENGLISH |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: FREI PATENTANWALTSBUERO Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 59903091 Country of ref document: DE Date of ref document: 20021121 |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20030122 |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FG2A Ref document number: 2185320 Country of ref document: ES Kind code of ref document: T3 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed |
Effective date: 20030717 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20090325 Year of fee payment: 11 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20090324 Year of fee payment: 11 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20100303 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100303 Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20100303 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R082 Ref document number: 59903091 Country of ref document: DE Representative=s name: PATENTANWAELTE UND RECHTSANWALT WEISS, ARAT & , DE Ref country code: DE Ref legal event code: R082 Ref document number: 59903091 Country of ref document: DE Representative=s name: PATENTANWAELTE UND RECHTSANWALT DR. WEISS, ARA, DE |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 18 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 19 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20180321 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 20180323 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: ES Payment date: 20180427 Year of fee payment: 20 Ref country code: DE Payment date: 20180518 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PFA Owner name: BALTEC MASCHINENBAU AG, CH Free format text: FORMER OWNER: BALTEC MASCHINENBAU AG, CH |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 59903091 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: ES Ref legal event code: FD2A Effective date: 20200904 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: ES Free format text: LAPSE BECAUSE OF EXPIRATION OF PROTECTION Effective date: 20190304 |