Die Erfindung betrifft ein Verfahren zur Ermittlung von auf
Straßenstrecken, insbesondere Autobahnen bezogene Verkehrsinformationen,
wobei mittels ortsfester Detektoren lokale Erfassungsquerschnitte
gebildet, verkehrsbezogene Meßwerte erfaßt,
mittels lokaler Rechner vorverarbeitet und auf ein vorgegebenes
Datenprotokoll normiert, aggregiert und per Funk an
eine übergeordnete Datenverarbeitungsanlage übertragen werden,
wobei die übertragenen Daten in wenigstens einem Berechnungsverfahren
zur Ermittlung von Verkehrsinformationen bearbeitet
werden, dessen Eingangsdaten wenigstens Fahrzeuggeschwindigkeit
v und Verkehrsstärke q sind und das als Ausgangsdaten
wenigstens Reisegeschwindigkeit und Verkehrsdichte
k an einem Erfassungsquerschnitt hervorbringen kann.
Im Stand der Technik ist es bekannt, an einzelnen Meßstellen
Verkehrsflußinformationen zu erfassen, um daraus direkte Störinformationen
abzuleiten oder Verkehrsentwicklungsprognosen
für benachbarte Streckenabschnitte zu entwickeln. Es sind jeweils
nur Einzellösungen bekannt.
Beispielsweise ist in der EP 0 256 483 A1 ein Verkehrsleit- und
Informationssystem offenbart, welches unter Verwendung
ortsfester Leitbaken und in Fahrzeugen angeordneten Sende- bzw.
Empfangseinheiten Verkehrsflußinformationen ermittelt.
Aus diesen Verkehrsflußinformationen werden insbesondere
Störinformationen ermittelt, um Leitsignale zu schalten.
Aus der DE-P 44 08 547 ist ein Verfahren zur Verkehrserfassung
und Verkehrssituationserkennung auf Autostraßen, vorzugsweise
Autobahnen, bekannt. Zur Bildung von sogenannten
Meßquerschnitten werden spurbezogene Meßstellen eingerichtet,
die mit Verkehrssensoren, beispielsweise Induktionsschleifen,
zur Kfz.-Detektion und mit einer Verkehrsdaten-Verarbeitungs-Einrichtung
versehen sind. Es werden regelmäßig Verkehrsdaten
wie Kfz.-Geschwindigkeit, Verkehrsstärke und Verkehrsdichte
ermittelt und daraus bestimmte Verkehrskenngrößen in einer
Verkehrsdatenaufbereitung gebildet. Dabei bilden jeweils zwei
benachbarte Meßstellen einen Meßabschnitt mit einer bestimmten
Streckenlänge. Aus den Verkehrsdaten zweier solcher Meßstellen
werden Verkehrskenngrößen gebildet. Diese sind eine
Geschwindigkeitsdichte-Differenz, berechnet aus lokalen Verkehrsdaten
mittlerer Geschwindigkeit und der Verkehrsdichte,
ein Trendfaktor, ermittelt über einen bestimmten Zeitraum aus
dem Verhältnis der Verkehrsstärken beider Meßstellen sowie
ein Verkehrsstärketrend. Aus diesen Daten wird mittels einer
Fuzzylogik die Wahrscheinlichkeit für eine kritische Verkehrssituation
abgeleitet. Bei Erreichen eines Wahrscheinlichkeitsschwellwertes
kann dann ein Steuersignal für ein
Wechselverkehrszeichen erzeugt werden.
Im Stand der Technik sind auch Detektoren bekannt, die das
Vorhandensein und die Geschwindigkeit eines bewegten Objektes
erfassen können. Beispielsweise arbeiten derartige Detektoren
nach einem Passiv-Infrarot-Verfahren, welches ggf. auch mit
anderen Verfahren kombiniert werden kann. Im Stand der Technik
ist bisher kein Verfahren bekannt, flächendeckend Verkehrsinformationen
zu erfassen und auszuwerten. Insbesondere
sind keine Verfahren bekannt, die die Verkehrsinformationsermittlung
streckenabschnittsbezogen variabel, ggf. ereignisorientiert
und mit geringem Datenübertragungsaufwand ermöglichen.
Ein geringer Datenübertragungsaufwand ist einerseits zur
Durchführung eines energiesparenden Verfahrens erforderlich,
andererseits um möglichst transparente und leicht pflegbare
Datenbestände zu erzeugen.
Wesentlicher Aspekt der vorliegenden Erfindung ist die optimale
Auswertung und Weiterverarbeitung der empfangenen Daten
in einer Zentraleinheit, um die unter wirtschaftlichen Gesichtspunkten
erfassten und gesendeten Daten so umfassend und
aussagekräftig wie möglich zu verarbeiten, aber auch zu Ergebnissen
zu gelangen, deren Aussagegehalt so eindeutig und
sicher wie möglich ist. Diesbezüglich sind nur Einzellösungen
bekannt.
Ausgehend von diesem Stand der Technik liegt der vorliegenden
Erfindung die Aufgabe zugrunde, eine flächendeckende
Verkehrsdatenerfassung der gattungsgemäßen Art, durch welche
mit Einfachsensorik und geringem Datenübertragungs- sowie
Energieaufwand zuverlässige und hinreichend aussagekräftige
Datengrundlagen für unterschiedliche Verkehrsinformationsdienste
bereitgestellt werden, derart verbessert bereitzustellen,
so daß die erfassten und gesendeten Daten so umfassend
und aussagekräftig sowie vom Ergebnis her so eindeutig
und sicher wie möglich analysiert und verarbeitet werden.
Zur technischen Lösung dieser Aufgabe wird mit der
Erfindung vorgeschlagen ein Verfahren zur Ermittlung von auf
Straßenstrecken, insbesondere Autobahnen, bezogene Verkehrsinformationen,
wobei mittels ortsfester Detektoren lokale
Erfassungsquerschnitte gebildet, verkehrsbezogene Meßwerte
erfaßt, mittels lokaler Rechner vorverarbeitet und auf ein
vorgegebenes Datenprotokoll normiert, aggregiert und per
drahtloser Übermittlung an eine übergeordnete Datenverarbeitungsanlage
übertragen werden, wobei die übertragenen Daten
in wenigstens einem Berechnungsverfahren zur Ermittlung von
Verkehrsinformationen bearbeitet werden, dessen Eingangsdaten
wenigstens Fahrzeuggeschwindigkeit v und Verkehrsstärke q
sind und das als Ausgangsdaten wenigstens Reisegeschwindigkeit
und Verkehrsdichte k an einem Erfassungsquerschnitt hervorbringen
kann, und wobei die Daten anschließend in wenigstens
einem komplexen erweiterten Bearbeitungsverfahren zur
Ermittlung von auf Strecken bezogenen Verkehrsinformationen
weiterverarbeitet werden.
Die Erfindung ermöglicht die Realisierung eines stufenförmig
organisierten Verarbeitungssystems, wobei bereits kurzfristig
Ergebnisse erzielt werden können, die durch Ausweitung in die
einzelnen Stufen konsolidiert und verfeinert werden. Durch
die Auflösung in einzelne Teilaufgaben bzw. Stufen ergibt
sich ein hohes Maß an Flexibilität und an Ausfallsicherheit
durch die Bildung von Rückfallebenen. Durch die lokale Voranalyse
des Verkehrs ergeben sich Möglichkeiten zur äußerst
energiesparenden, ereignisorientierten Datenübertragung zu
den übergeordneten Datenverarbeitungsanlagen bzw. -zentralen.
Vorzugsweise werden ortsfeste Detektoren an Anschlußstellen,
Knotenpunkten und dergleichen positioniert. Darüber hinaus
wird die Anordnungsdichte der ortsfesten Detektoren in Abhängigkeit
von Verkehrserwartungsschätzungen bestimmt. Somit
lassen sich durch die Anordnung vieler lokaler Erfassungssysteme
flächendeckende Netze aufbauen. Mit der Erfindung ist
es auch möglich, einen Gesamtnetzaufbau zu organisieren. An
verkehrstechnisch kritischen Positionen werden lokale Detektoren
und Vorverarbeitungsrechner angeordnet, die über Funk
in vorzugsweise digitaler Technologie die Daten an übergeordnete
Datenverarbeitungsanlagen bzw. -zentralen weiterleiten.
Dort können dann weitere Verkehrsmodelle auf die Daten angewandt
werden.
Aus der lokalen Auswertung ergibt sich die Möglichkeit der
lokalen Zustandserkennung. Durch die Verknüpfung der Daten
benachbarter lokaler Erfassungsquerschnitte kann ein sogenannter
streckenbezogener Level of Service in einer übergeordneten
Datenverarbeitungsanlage oder einer dem Gesamtnetz
zugeordneten Zentrale ermittelt werden.
Die Verknüpfung dieser Daten, ggf. in Kombination mit den Daten
der lokalen Erfassungsquerschnitte ermöglicht die Errechnung
einer erweiterten Situationserkennung. Hier können dynamische
Zustandsschätzungen erfolgen, um eine verbesserte Zustandsschätzung
in kritischen Streckenabschnitten durch Zuschaltung
eines angepaßten Systems zur erweiterten Situationserkennung
zu erlangen. Die Ergebnisse sind detaillierte
streckenbezogene Daten und feiner untergliederte Situationsklassifizierungen.
Darüber hinaus lassen sich Angaben einer
etwaigen Sicherheit der jeweiligen Schätzung erzielen. Eine
Korrektur hinsichtlich stark verrauschter Daten wegen
schlechter Datenübertragung, bei größeren Zeitintervallen
oder nur sporadischen Daten ist mit der Erfindung vorgesehen.
Mit besonderem Vorteil wird vorgeschlagen, daß zur lokalen
Vorverarbeitung der Daten deren Plausibilität anhand von Modellvergleichen
überprüft wird, Mittelwertberechnungen durchgeführt,
aus der Veränderung der Maßwerte Trendfaktoren ermittelt,
und daß aus den ermittelten Daten taktweise Zustandscodes
ermittelt werden. Als Meßwerte werden zumindest Fahrzeuggeschwindigkeit,
Verkehrsstärke und querschnittsbezogene
Belegung erfaßt.
Nachdem von einem Detektor, beispielsweise einem Passiv-Infrarot-Detektor,
Meßdaten geliefert werden, werden diese
vorverarbeitet, beispielsweise indem Mittelwertberechnungen,
Plausibilitätskontrollen und Trendfaktorermittlungen durchgeführt
werden. Aus den Veränderungen der Daten oder den Daten
selbst werden dann Zustandscodes ermittelt, beispielsweise in
der Form eines Zahlenwertes für Zustände wie freier Verkehrsfluß,
Staugefahr, Stop and Go, Stau oder Stillstand u.s.w.
Auswertungszyklen können beispielsweise alle 1 bis 5 Minuten
gewählt werden. Der Auswertungszyklus kann jedoch variabel
festgelegt werden, beispielsweise in Abhängigkeit von den Zustandscodes
oder den Verkehrszuständen. Das gleiche gilt für
die Datenübertragungsrate, die beispielsweise in Abhängigkeit
von dem ermittelten Zustandscode angewandt wird, beispielsweise
bei freiem Verkehrsfluß alle 30 Minuten eine Übertragung
bei Mittelwertbildung alle 5 Minuten. Je nach Störzustand
kann die Übertragungsdichte erhöht werden. Dabei werden
die Datenübertragungsraten benachbarter Erfassungsquerschnitte
aufeinander abgeglichen.
Die Meßwerte können fahrspurenbezogen erfaßt werden, was aber
nicht zwingend erforderlich ist, es können auch andere Erfassungsquerschnitte
definiert werden. Auch ist es grundsätzlich
möglich, Fahrzeugtypunterscheidungswerte, also beispielsweise
Lkw, Pkw und dergleichen zu erfassen.
Darüber hinaus wird weiterhin vorgeschlagen, daß Quelle-Ziel-Beziehungen
durch die Analyse der Daten aller Erfassungsquerschnitte
eines Netzes ermittelt, daß die Daten zur Routensuche,
zur Ausgabe von Verkehrsleitungsinformationen ausgewertet,
zur Präzisierung statistischen Analysen unterzogen und
daß die Daten zur Abgabe von Verkehrsentwicklungsprognosen
ausgewertet werden.
Mit der Erfindung werden Verfahren bereitgestellt, um unterschiedliche
Arten und Qualitäten von Verkehrsinformationsdaten
zur Verfügung zu stellen. Hauptaufgabe ist es, solche Daten
für die Kraftfahrzeugführer aufzubereiten und diesen
zweckmäßige Informationen bereitzustellen. Dabei kann es sich
beispielsweise um Reisezeitanzeigen, Routenanzeigen, Verkehrsschlußprognosen,
Stauanzeigen und dergleichen handeln.
In den einzelnen Fahrzeugen werden beispielsweise Informationsdisplays
angeordnet, auf welchen die Kraftfahrzeugführer
ihre geplanten Routen und die Reisezeitinformationen angezeigt
bekommen. Sie können dann beispielsweise unter verschiedenen
Alternativen die jeweils schnellste Route wählen.
Zusätzlich oder alternativ können Hinweise auf Stauentwicklungen,
Wahrscheinlichkeiten in Bezug auf die weitere Entwicklung
auf dem bevorstehenden Streckenabschnitt und dergleichen
angezeigt werden. Die Anwendungsbreite ist umfangreich.
Mit der Erfindung wird ein äußerst flexibles Verfahren angegeben,
mit welchem unter Verknüpfung unterschiedlichster Verkehrsmodelle
ein nahezu netzumfassendes, flächendeckendes
Verkehrsinformationssystem aufbaubar ist, welches Daten für
unterschiedlichste Informationszwecke liefert. Es können herkömmliche
und bereits bekannte Modelle und Verfahren eingesetzt
und kombiniert werden. Prognosen können ganglinienbasierte
Prognosen an Meßstellen, modellgestützte Prognosen für
Abschnitte und Maschen und Ergänzungen nicht meßbarer Effekte
unter Verwendung künstlicher Intelligenz sein. Für die Berechnung
von Mittelwerten werden übliche Formeln eingesetzt.
Die übertragenen Daten können in zwei Berechnungsverfahren
unterschiedlicher Komplexität bearbeitet werden. Dabei ist
vorgesehen, daß eines der wenigstens zwei Berechnungsverfahren
ein einfaches Interpolationsverfahren geringer Komplexität
ist. Die Eingangsdaten des Berechnungsverfahrens geringer
Komplexität sind Fahrzeuggeschwindigkeit v und Verkehrsstärke
q, Ausgangsdaten sind eine Reisegeschwindigkeit und Verkehrsdichte
k. Weiterhin ist vorgesehen, daß das Berechnungsverfahren
geringer Komplexität zusätzlich eine Staustörmeldung
ausgibt. Ein wie beschriebenes Verfahren benötigt nur ein Minimum
an Eingangsdaten und kann sehr schnell sehr verläßliche
Aussagen über den Verkehrszustand im Bereich eines Meßquerschnittes
treffen. Bei der Interpolation wird vereinfachend
davon ausgegangen, daß sich alle Fahrzeuge gleich verhalten.
Ein anderes Berechnungsverfahren kann ein auf der Datenanalyse
auf der Basis eines Fundamentaldiagramms basierendes Verfahren
hoher Komplexität sein. Ein Fundamentaldiagramm ist
eine an sich bekannte, auf einen Meßquerschnitt bezogene Kurve.
Die Darstellung ist die Kurve der Verkehrsstärke q über
der Belegung k. Die Kurve entspricht in vereinfachter und
stark geglätteter Form im wesentlichen einer unsymmetrischen
Gaußverteilung und läßt Aussagen über kritische und unkritische
Zustände zu. Eingangsdaten des Berechnungsverfahrens hoher
Komplexität sind Fahrzeuggeschwindigkeit v, Verkehrsstärke
q und Belegung b, Ausgangsdaten eine Reisezelt bezogen auf
Reisegeschwindigkeit und Verkehrsdichte k. Weiterhin kann
vorgesehen sein, daß das Berechnungsverfahren hoher Komplexität
zusätzlich ein Verkehrssituationsstatussignal, wenigstens
differenziert nach Frei/Kritisch/Stau ausgibt. Auch dieses
zweite Verfahren benötigt nur ein Minimum an Eingangsdaten
und kann sehr schnell sehr verläßliche Aussagen über den Verkehrszustand
im Bereich eines Meßquerschnittes treffen.
Die redundante Anwendung von wenigstens zwei Verfahren erhöht
erheblich die Sicherheit und ermöglicht eine Überprüfung der
Ergebnisse hinsichtlich ihrer Qualität.
Die vorliegende Erfindung setzt an dieser Stelle ein und bezieht
sich auf die Analyse der Daten in Bezug auf größere Abschnitte
des Verkehrsnetzes. Es wird vorgeschlagen, daß die
übertragenen Daten in wenigstens einem dritten, hochkomplexen
Berechnungsverfahren für eine erweiterte Situationserkennung
bearbeitet werden. Dabei finden Eingang auch die Ergebnisse
der vorhergehenden Berechnungsverfahren. Die hochkomplexen
Verfahren der erweiterten Situationserkennung werden erweiterte
Bearbeitungsverfahren genannt.
Mit besonderem Vorteil schlägt die Erfindung vor, daß bei dem
erweiterten Beabeitungsverfahren Fuzzylogik eingesetzt wird,
um aus den vorverarbeiteten Daten ein Interpretationssymbol
des aktuellen Verkehrsablaufes und eine zugehörige Wahrscheinlichkeit
zu ermitteln. Zusätzlich wird mit Vorteil vorgeschlagen,
daß die Interpretationssymbole und Wahrscheinlichkeiten
mittels einer Sperrmatrix verknüpft werden. Diese
erfindungsgemäße Datenanalyse nach der Multi-Modell-Logik hat
also ganz besonders brauchbare Ergebnisse, die neben Indikatoren
für eine bestimmte Verkehrssituation in Bezug auf einen
bestimmten Streckenabschnitt auch eine zugehörige Wahrscheinlichkeit
enthalten, so daß also die Zuverlässigkeit der momentanen
Situationserkennung als Ergebnis mitgeliefert wird.
Damit ergeben sich sehr brauchbare Schaltempfehlungen aus der
Situationsinterpretation, die auf verschiedene lokale und
streckenbezogene Einzelverfahren aufgesetzt ist.
Eines der sinnvollerweise vorgeschalteten Einzelverfahren
sieht vor, daß mittels einem weiteren erweiterten Bearbeitungsverfahren
auf der Basis der an einem Erfassungsquerschnitt
ermittelten Daten die Verkehrsflußdaten bis zum nächsten
Erfassungsquerschnitt unter Verwendung eines Verkehrsmodells
geschätzt, mit den am nächsten Erfassungsquerschnitt
ermittelten entsprechenden Daten verglichen und aus den Abweichungen
Korrekturwerte ermittelt und in einen nächsten
Schätzzyklus eingebracht werden. Mit Vorteil wird vorgeschlagen,
daß die Strecke zwischen einem und dem nächsten Erfassungsquerschnitt
segmentiert wird. Die Segmentzahl und Segmentlänge
ist nicht ohne Einfluß und sind parameterabhängig
festlegbar. Weiterhin wird vorgeschlagen, daß die Korrekturwerte
als Parameter in das der Schätzung zugrundeliegende
Verkehrsmodell eingebracht werden. Zudem ist ein Vorteil der
Erfindung, daß die erfassten, ermittelten und geschätzten
Werte um die simulierten Werte einer fiktiven Störstelle ergänzt
werden. Es ist sinnvoll, daß als fiktive Störstelle eine
Verkehrszuflußstelle und/oder eine Verkehrsabflußstelle
simuliert wird. Das Verfahren erhält also von vorherein Fehler,
die iterativ auf Null gerechnet werden müssen, es sei
denn, es liegt tatsächlich eine Störung vor. Mit besonderem
Vorteil wird vorgeschlagen, daß das für das erweiterte Bearbeitungsverfahren
ein Filterschätzverfahren eingesetzt und
weiterhin für das Filterschätzverfahren ein Kalmanlogarithmus
verwendet wird. Besonders brauchbar sind die Ergebnisse, wenn
das Verkehrsmodell bei Abschnitten mit Anschlußstellen zur
Nutzung von Standardganglinien erweitert wird.
Mit der Erfindung wird darüber hinaus vorgeschlagen, daß bei
einem weiteren erweiterten Beabeitungsverfahren Fuzzylogik
eingesetzt wird. Diese kann gezielt zur Störstellenidentifikation
eingesetzt sein. Dabei ist von Vorteil, daß das weitere
erweiterte Bearbeitungsverfahren, welches unter Verwendung
von Fuzzylogik aus den vorverarbeiteten Daten Störungen ermittelt,
dem erweiterten Bearbeitungsverfahren mit Verwendung
der Filterschätztechnik vom Datenfluß her betrachtet vorgeschaltet
wird.
Zudem ist vorteilhaft und wichtig, daß das erweiterte Bearbeitungsverfahren,
welches unter Verwendung von Fuzzylogik
aus den vorverarbeiteten Daten Interpretationssymbole und
Wahrscheinlichkeiten ermittelt, dem weiteren erweiterten Bearbeitungsverfahren
mit Verwendung der Filterschätztechnik
vom Datenfluß her betrachtet nachgeschaltet wird.
Die Erfindung schlägt vor, daß Neuro-Fuzzy-Logik eingesetzt
wird.
Weitere Vorteile und Merkmale der Erfindung ergeben sich aus
der folgenden Beschreibung eines detailliert erläuterten Beispiels
anhand der Figuren der Zeichnung.
Fig.1 eine schematische Draufsicht au einen Autobahnabschnitt
mit Meßquerschnitten, Fig.2 eine Darstellung des Verkehrsablaufs am 27.02., Fig.3 eine Darstellung der Störindikatoren der untersuchten
Verfahren, Fig.4 eine Auswertung des Kalmanfilter-Störzuflusses, Abschnitt
MQ1-MQ3 am 16.02., Fig.5 eine Auswertung des Kalmanfilter-Störzuflusses am
Meßquerschnitt MQ1 am 16.02.1996, Fig.6 eine Auswertung des Kalmanfilter-Störzuflusses am
Meßquerschnitt MQ3 am 16.02.1996.
Das folgende Beispiel befaßt sich mit der verkehrstechnischen
Bewertung eines neuen Verfahrens mit Hilfe einer Vorher-Nachher-Untersuchung
auf der Bundesautobahn A9, zwischen
Eching und Kieferngarten (Bild 1). Das dort installierte,
konventionelle Verfahren zur Störfallerkennung wurde als Referenz
herangezogen. Die realen Verkehrsdaten auf dieser Versuchsstrecke
wurden erfaßt, um das (Multi-Modell-Logik) MML-Verfahren
off-line zu testen. Zusätzlich wurden Videoaufnahmen
durchgeführt, und z.B polizeiliche Unfallprotokolle analysiert,
um eine objektive Überprüfung herzustellen. Die folgende
Erläuterung beschreibt die methodische Vorgehensweise
der verkehrstechnischen Bewertung, stellt die erzielten Ergebnisse
dar, und leitet die Schlußfolgerung des Beispiels
ab.
Bewertungsmethoden
Aufgaben und Zielsetzung
Ermittlung der verkehrstechnischen Merkmale der Verfahren
Die relevanten verkehrstechnischen Merkmale der zu vergleichenden
Verfahren sollten dabei über geeignete Indikatoren
ermittelt werden.
Vergleich des MML-Verfahrens mit dem konventionellen Verfahren
Das MML-Verfahren zur erweiterten Situationserkennung
sollte dabei mit dem konventionellen Verfahren verglichen
werden, hinsichtlich der definierten Bewertungsindikatoren.
Ermittlung des topologischen Anwendungsbereichs
Der geeignete topologische Anwendungsbereich des MML-Verfahrens
sollte, soweit möglich, abgeschätzt werden.
Insbesondere sollte dabei geprüft werden, wie sich die
Vergrößerung des Abstands zwischen benachbarten Meßquerschnitten
auf die Detektionsqualität der zu vergleichenden
Verfahren auswirken.
Darstellung des MML-Verfahrens
Das prinzipielle Konzept des MML-Verfahrens ist die Integration
verschiedener, in der letzten Zeit entwickelter neuer
Methoden zur automatischen Situationserkennung. Da die einzelnen
Methoden einander ergänzen können, ist zu erwarten,
daß die Qualität des integrierten Verfahrens zur erweiterten
Situationserkennung (ESE) insgesamt erhöht wird.
Das Verfahren ESE basiert im wesentlichen auf den Bausteinen
- Fuzzy-Logik zur automatischen Störfallerkennung (FL)
- erweitertes Kalmanfilter zur dynamischen Zustandsschätzung
(KF)
- lokale Verfahren zur Stoßwellendetektion (LV)
die mit Hilfe einer übergreifenden Multi-Model-Logik (MML) im
Verbund situationsabhängig ausgewertet werden.
Im Gegensatz zum konventionellen Verfahren (KV), ist das MML-Verfahren
in der Lage, die folgenden kritischen Situationen
zu erkennen und zu unterscheiden:
• Verkehrstechnischer Engpaß
Als verkehrstechnischer Engpaß ist eine Situation definiert,
bei der sich die Anzahl der verfügbaren Fahrstreifen
durch ein verkehrstechnisches Ereignis, z.B. einen Unfall
oder ein liegengebliebenes Fahrzeug, reduziert, und sich
infolgedessen ein Stau innerhalb des Abschnitts gebildet
hat.
• Baulicher Engpaß
Hierbei handelt es sich um eine Situation, bei der die Anzahl
der Fahrstreifen durch bauliche Einschränkungen reduziert
ist.
• Verdichtung
Hierbei handelt es sich um die bereichsweise Verdichtung in
einem Abschnitt.
• Einwandernder Stau
Es handelt sich dabei um Stauungen, die vom stromabwärts
liegenden Abschnitt in den betrachteten Abschnitt einwandern.
Im betrachteten Abschnitt sind daher nur die Wirkungen
zu erkennen, die Störungsursache liegt in einem stromabwärts
liegenden Abschnitt.
• Zugestauter Abschnitt
Ein Abschnitt ist dann zugestaut wenn die Verkehrsdichte im
gesamten Abschnitt eine definierte Größe überschreitet und
die Geschwindigkeit an den beiden Abschnittsgrenzen eine
definierte Größe unterschreitet.
• Stockender Verkehr
Dieser bezeichnet Situationen mit Unruhe im Verkehrsablauf.
Definition der Bewertungsindikatoren
Entsprechend den Zielsetzungen sind zur Abschätzung der technischen
Merkmale des MML-Verfahrens sowie zum Vergleich des
Verfahrens mit dem konventionellen Verfahren die folgenden
Indikatoren definiert und verwendet worden:
- Erkennungszeit (EZ): Zeitspanne zwischen Anfang einer relevanten
Situation und Erkennung der Situation. Im Fall, daß
der Anfangszeitpunkt einer Situation nicht bekannt ist,
wird die Differenz zwischen Erkennungszeiten einzelner Systeme
als Basis zum Vergleich verwendet.
- Detektionsrate (DR): Verhältnis der Anzahl der erkannten
Störfälle/Situationen zur gesamten Anzahl der Störfälle/Situationen
- Fehlalarmquote (FQ): Verhältnis der Anzahl der Fehlalarme
zur gesamten Anzahl der Alarme.
Test Methode
Im Rahmen der vorliegenden Bewertung wurden die folgenden Ansätze
zum Testen des MML-Verfahrens angewandt:
- Feldversuch zur Erfassung der realen Verkehrsdaten und der
Systemdaten des konventionellen Verfahrens zur Störfallerkennung,
- Off-Line-Test mit den erfaßten realen Verkehrsdaten zur Erfassung
der Systemdaten des MML-Verfahrens, um einen echten
Vergleich mit dem konventionellen Verfahren zu ermöglichen,
- Statistische Analyse zur Ableitung der statistisch gesicherten
Ergebnisse.
Um die definierten Merkmale der untersuchten Verfahren realistisch
zu ermitteln und zu vergleichen, ist es notwendig, eine
objektive Beurteilungsbasis, die die Realität widerspiegelt,
zu bilden und anzuwenden. Nur mit einer solchen objektiven
Beurteilungsbasis ist ein konsistenter Systemvergleich
möglich. Aus diesem Grund wurden auch die relevanten Unfallprotokolle
der Polizei analysiert und Videoaufnahmen durchgeführt.
Datenerfassung
Beschreibung der Meßstrecke
Zur Erfassung der erforderlichen Daten wurde die dreispurige
Strecke der A9 zwischen Eching (KM 514,830) und Kieferngarten
(KM 525,000), Richtung München als Versuchsfeld einbezogen
(Bild 1). Mit vier Ausfahrten (Eching, Garching-Nord, Garching-Süd
und Kieferngarten) und dem Autobahnknotenpunkt München-Nord
ist diese Strecke überdurchschnittlich belastet.
Insbesondere sind Staus oft während der Morgenspitzenstunden
zu beobachten.
Um die Verkehrssituationen im Bezug auf einzelne Abschnitte
zu beschreiben, wurde diese Strecke in 10 Abschnitte AS1
..AS10 zwischen elf Meßquerschnitten MQ1..MQ11 aufgeteilt
(Tabelle 1)
| Festlegung der Abschnitte |
| Meßquerschnitt | MQ- Kilometer | Abschnitt | Abschnitts -länge [m] |
| MQ1 | 514,830 |
| | | AS1 | 1270 |
| MQ2 | 516,100 |
| | | AS2 | 2560 |
| MQ3 | 518,660 |
| | | AS3 | 670 |
| MQ4 | 519,330 |
| | | AS4 | 1500 |
| MQ5 | 520,830 |
| | | AS5 | 340 |
| MQ6 | 521,170 |
| | | AS6 | 970 |
| MQ7 | 522,140 |
| | | AS7 | 630 |
| MQ8 | 522,770 |
| | | AS8 | 1240 |
| MQ9 | 524,010 |
| | | AS9 | 1200 |
| MQ10 | 525,210 |
| | | AS10 | 400 |
| MQ11 | 525,610 |
Die zu erfassenden Daten und Informationen sind in zwei Gruppen
unterteilt worden:
- Verkehrsdaten und
- Systemdaten.
Die Verkehrsdaten wurden durch Messung, Videoaufnahme, oder
Unfallprotokoll der Polizei erfaßt.
Die Systemdaten, die die Systemreaktionen auf eine definierte
Situation charakterisieren, wurden durch eine Serie von Off-Line-Tests
(MML- oder FL-Verfahren) oder durch automatische
Registrierung (Konventionelles Verfahren) erfaßt.
Im folgenden sind die erforderlichen Daten/Informationen im
einzelnen beschrieben.
• Unfallprotokoll
Das Unfallprotokoll der Polizei wurde bei der Ermittlung
der definierten Systemmerkmale als eine objektive Beurteilungsbasis
benutzt. Ferner wurde dies als eine Basis
für die Auswahl von Verkehrsdaten verwendet. (Wegen der
einfachen Unfalldarstellung konnten die verfügbaren Protokolle
jedoch nur begrenzt eingesetzt werden.)
• Videoaufnahme
Die Videoaufnahme ist eine weitere Informationsquelle
zur Bildung der Beurteilungsbasis (z.B. Bestätigung eines
vom System erkannten Störfalls). Eine geeignete Videoaufnahme
kann ausreichende und zuverlässige Informationen
über die realen Verkehrssituationen liefern. In
Absprache mit dem Auftraggeber wurden deswegen die Videoaufnahmen
an zwei Stellen für mehrere Tage durchgeführt.
• Meßdaten
Die Meßdaten (Minutenwerte von Geschwindigkeit und Verkehrsstärke)
wurden im Rahmen der vorliegenden Arbeit
verwendet, um die Off-Line-Tests durchzuführen. Dabei
wurden zur Ermittlung der definierten Merkmale der zu
vergleichenden Verfahren gleiche Verkehrsdaten zugrunde
gelegt. Dadurch ist ein echter Vergleich der Verfahren
möglich. Die Meßdaten sind für insgesamt 22 Tage (siehe
Tabelle 3) erfaßt worden.
• Systemdaten
Die Systemdaten dienen zur Ermittlung der Systemreaktionen
auf Verkehrssituationen. Insbesondere sind z.B.
Zeitpunkt der Auslösung bzw. der Auflösung jedes Alarms
und Typ der erkannten Situationen zu erfassen.
Die Datenerfassung wurde im wesentlichen von der Firma Siemens
durchgeführt. In der Tabelle 2 ist ein (Überblick über
die erfaßten Daten gegeben.
| Überblick über die erfaßten Daten |
| Datentyp | Erfaßte Daten |
| Meßdaten | 02.05., 03.05, 13.05., 19.05., 24.05., |
| 27.05., 29.05, 02.06, 08.06., 14.06., |
| 22.06., 25.06., 29.06., 02.07., 25.08., |
| 02.09., 04.10., 09.10., 10.10., |
| 16.10.-31.12. |
| 01.01.-29.02. |
| FL-Systemdaten | 02.05., 03.05, 13.05., 19.05., 24.05., |
| 27.05., 29.05, 02.06, 08.06., 14.06., |
| 22.06., 25.06., 29.06., 02.07., 25.08., |
| 02.09., 04.10., 09.10., 10.10., |
| 16.10.-31.12. |
| 01.01.-29.02. |
| MML-Systemdaten | 16.10-31.12 |
| 01.01.-29.02. |
| Unfallprotokoll der Polizei | Mai-Dez. |
| Jan.-April |
| Videoaufnahme | 19.05., 29.05. (Kilometer 524,350) |
| 26.-27.06. (Kilometer 521,400) |
| 26.-28.02. (Kilometer 521,400) |
Ein spezifisches Verfahren wurde zur automatischen Ermittlung
der folgenden Parameter entwickelt:
- Erkennungsuhrzeit der einzelnen Verfahren
- Differenz der Erkennungszeit zwischen dem MML- (oder
FL-)Verfahren und dem konventionellen Verfahren
- Anzahl der zusätzlich gewarnten Fahrzeuge durch das MML- oder
das FL-Verfahren. (Fahrzeuge, die während der Differenzzeit
zwischen MML-Erkennung und konventioneller Erkennung
den stromauf liegenden Querschnitt überfahren haben.)
Außerdem wurden die relevanten Unfallprotokolle und Videoaufnahmen
analysiert.
Wegen der großen Menge der vorhandenen Daten war es notwendig,
einen Kompromiß zwischen dem Aufwand zur Datenauswertung
und der erforderlichen statistischen Sicherheit zu erzielen.
Aus diesem Grund wurden die vorhandenen Daten Tag für Tag
ausgewertet, und eine ständige Prüfung über die Notwendigkeit
einer weiteren Datenauswertung durchgeführt. In Tabelle 3 ist
angegeben, für welche Tage die entsprechenden Daten ausgewertet
worden sind.
| Überblick über die ausgewerteten Daten |
| Tage | KV | FL | MML | Unfallprotokoll | Videoaufnahme |
| 02.05. | | | | |
| 27.05. | | | | |
| 02.06. | | | | |
| 08.06. | | | | |
| 14.06. | | | | |
| 22.06. | | | | |
| 25.06. | | | | |
| 29.06. | | | | |
| 02.07. | | | | |
| 25.08. | | | | |
| 02.09. | | | | |
| 04.10. | | | | |
| 09.10. | | | | |
| 10.10. | | | | |
| 07.11. | | | | |
| 29.11. | | | | |
| 13.02. | | | |
| 15.02. | | | |
| 16.02. | | | | |
| 26.02. | | | | | |
| 27.02. | | | | | |
| 28.02. | | | | | |
Vor einer detaillierten statistischen Analyse der Ergebnisse
wurde eine Plausibilitätsprüfung durchgeführt, um mögliche
Meßfehler zu beseitigen. Im Zweifelsfall wurden die relevanten
Videoaufnahmen, die Unfallprotokolle der Polizei und/oder
die Meßdaten sorgfältig analysiert, um die Gefahr einer subjektiven
Entscheidung zu minimieren. Figur 2 stellt als Beispiel
den Verkehrsablauf am 27.02. dar. Solche Abbildungen
wurden zusammen mit den Videoaufnahmen und Unfallprotokollen
als Grundlage einer genaueren Analyse der Störungen benutzt.
In Figur 3 ist als ein Beispiel der Verlauf der Störindikatoren
STk, STf, STkal bzw. STm des konventionellen, FL-, Kalmanfilter-,
bzw. MML- Verfahrens und der EZk, EZf bzw. EZm:
Erkennungszeit des konventionellen, FL- bzw. MML-Verfahrensbei
einer Störung dargestellt.
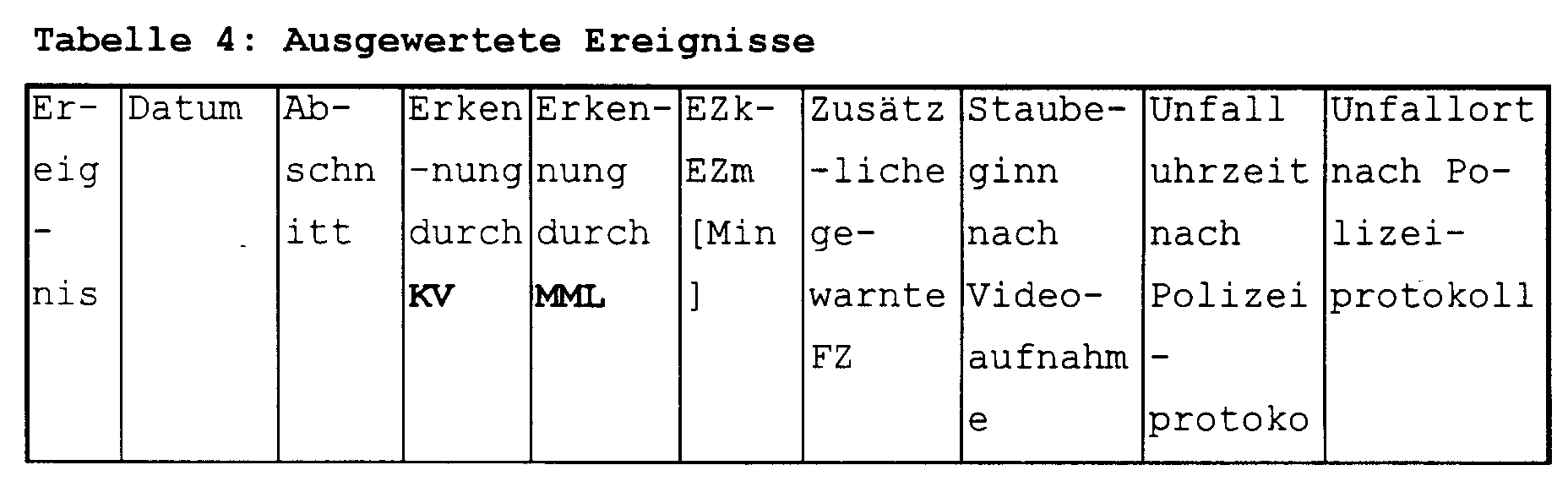
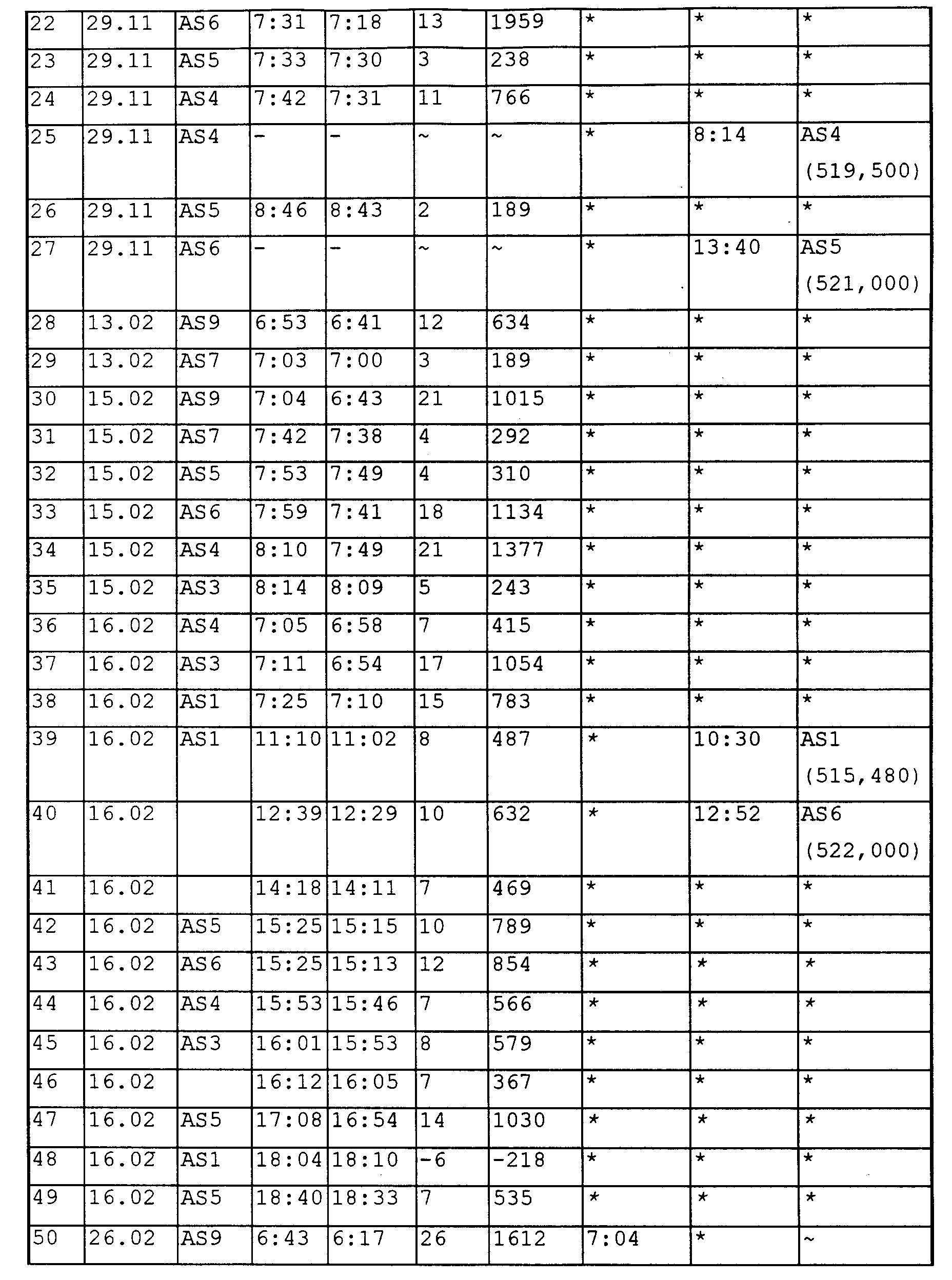
Nach einer Plausibilitätsprüfung wurden insgesamt 60 Ereignisse
zur weiteren statistischen Analyse registriert (Tabelle
4).
Statistische Analyse
Auf der Basis der ausgewerteten Parameter wurde eine statistische
Analyse durchgeführt, um die Güte der untersuchten
Verfahren in Bezug auf die Störfallerkennung auch in statistischer
Hinsicht abzusichern und zu vergleichen. Insbesondere
wurden die folgenden statistischen Methoden angewandt:
- Abschätzung des Konfidenzintervalls für die ermittelten
Mittelwerte und
- T-Test zur Prüfung, ob die Verbesserung der Störfallerkennung
durch das MML-Verfahren signifikant ist.
Darstellung der Ergebnisse
Überblick über die ausgewerteten Ereignisse
In Tabelle 4 ist ein Überblick über die ausgewerteten Ereignisse
gegeben.
Die mittlere Differenz in den Erkennungszeiten zwischen dem
konventionellen Verfahren und dem MML-Verfahren ist wie folgt
ermittelt worden, auf der Basis der in Tabelle 4 aufgelisteten
Ereignisse:
wobei
Der Erwartungswert der Differenz der Erkennungszelten liegt
mit einem Konfidenzniveau von 95% in dem Bereich zwischen
7,45 und 11,59 Minuten.
Die mittlere Anzahl der zusätzlich gewarnten Fahrzeuge ist
entsprechend wie folgt ermittelt worden:
wobei
Das MML-Verfahren kann damit die Erkennungszeit des konventionellen
Verfahrens wesentlich verkürzen. Nach der vorliegenden
Untersuchung können durch das MML-Verfahren bei jedem
Störfall durchschnittlich 616 Fahrzeuge (potentielle Stautreffer)
zusätzlich gewarnt werden, was eine beträchtliche
Erhöhung der Verkehrssicherheit bedeutet. Die frühere Erkennung
der Störfälle kann ferner potentiell die Stausituation
verbessern, falls z.B. ein entsprechendes Verkehrsleit- oder
-informationssystem zur Wechselwegweisung, Routenempfehlung
oder auch zur Pre-Trip-Reiseplanung verfügbar ist.
Vergleich der Detektionsraten
Die Detektionsrate der Verfahren wurde ebenfalls auf der Basis
der in Tabelle 4 aufgelisteten Ereignisse verglichen. Bei
der Ermittlung der Detektionsrate wurden die nicht erkannten
Störfalle nach den relevanten Unfallprotokollen oder Videoaufnahmen
festgestellt. Die mittlere Detektionsrate ist wie
folgt jeweils für das konventionelle und das MML-Verfahren
ermittelt worden:
bzw.
wobei
Nach der vorliegenden Untersuchung haben die beiden Verfahren
eine akzeptable Detektionsrate. Eine höhere Detektionsrate
des MML-Verfahrens im Vergleich zum konventionellen Verfahren
ist bestätigt worden.
Vergleich der Fehlalarmquoten
Dieses Systemmerkmal konnte im Rahmen der vorliegenden Untersuchung
wegen der begrenzten Möglichkeiten zur Datenerfassung
nicht zufriedenstellend ermittelt werden. Eine genaue Untersuchung
dieser Fragestellung benötigt eine zeitlich lückenlose
Beobachtung der realen Verkehrssituation, z.B. durch Videoaufnahme.
Diese Voraussetzung konnte in der vorliegenden
Arbeit jedoch nicht erfüllt werden.
Für den Bereich der durchgeführten Videoaufnahmen (Tabelle 3)
wurde allerdings kein Fehlalarm der untersuchten Verfahren
festgestellt; das heißt, jede Alarmmeldung der Verfahren entsprach
auch einer tatsächlichen Verkehrsstörung.
Systemverhalten bei vergrößertem Abstand zwischen benachbarten
Meßquerschnitten
Um die Kosten der Verkehrsdatenerfassung zu reduzieren, ist
es anzustreben, den notwendigen Abstand zwischen benachbarten
Meßquerschnitten so zu wählen, daß ein vernünftiger Kompromiß
zwischen Anzahl Meßquerschnitte einerseits und erzielbarer
Detektionsqualität des Systems andererseits erreicht wird. Um
Hinweise zu erhalten, ob das MML-Verfahren auch bei vergrößertem
Abstand der Meßquerschnitte mit ausreichender Zuverlässigkeit
arbeitet, wurde eine entsprechende strichprobenhafte
Überprüfung vorgenommen, vgl. Tabelle 5.
| Darstellung der Abschnitte bei vergrößertem
Abstand zwischen Meßquerschnitten |
| Meßquerschnitt | MQ-Kilometer | Abschnittslänge [m] |
| MQ1 | 514,830 |
| | | 3830 |
| MQ3 | 518,660 |
| | | 2170 |
| MQ5 | 520,830 |
| | | 1940 |
| MQ8 | 522,770 |
| | | 1240 |
| MQ9 | 524,010 |
| | | 1600 |
| MQ11 | 525,610 |
Im Rahmen der vorliegenden Untersuchung war es allerdings
nicht möglich, das komplette MML-Verfahren für die vergrößerten
Abstände zu testen, da hierzu eine entsprechende Neuparametrierung
der Einzelverfahren sowie der MML-Logik vorzuschalten
wäre. Es wurde deswegen entschieden, beispielhaft
den Kalmanfilter-Störzufluß (KS) zu analysieren und das Systemverhalten
mit Hilfe dieses Indikators abzuschätzen. Entsprechend
dieser Entscheidung wurde der Kalmanfilter-Störzufluß
beim vorhandenen sowie vergrößerten Abstand für
drei Tage (07.11 , 16.02 und 28.02 ) ausgewertet und analysiert.
Dabei wurden 15 vom MML-Verfahren bei normalem Abstand
erkannte Störungen betrachtet, und der zeitliche Verlauf des
Kalmanfilter-Störzuflusses bei jeder Störung dargestellt. In
Fig. 4 ist die Auswertung des Kalmanfilter-Störzuflusses im
Abschnitt MQ1-MQ3 am 16.02. dargestellt.
Da ein Schwellenwert des Kalmanfilter-Störzuflusses zur Erkennung
einer Störung noch nicht festgelegt war (fehlende
Neuparametrierung, s.o.) wurden Erfahrungswerte (300 bis 700
Fz/h) als potentielle Schwellen definiert. In Tabelle 6 sind
die Ergebnisse der Analyse dargestellt.
Reaktion des Kalmanfilter-Störzuflusses (KS) bei
vergrößertem
Abstand zwischen den Meßquerschnitten |
| Abschnitt | Datum | Störung durch MML erkannt (norm. Abstd.) | KS>30 0 um | KS>40 0 um | KS>50 0 um | KS>60 0 um | KS>70 0 um |
| MQ1-MQ3 | 07.11 | 8:47 | 8:45 | - | - | - | - |
| MQ1-MQ3 | 07.11 | 9:39 | 9:40 | 9:40 | 9:40 | 9:40 | 9:40 |
| MQ1-MQ3 | 07.11 | - | 9:11 | - | - | - | - |
| MQ1-MQ3 | 07.11 | - | 9:23 | - | - | - | - |
| MQ1-MQ3 | 16.02 | 6:15 | 6:17 | 6:17 | 6:17 | 6:17 | 6:17 |
| MQ1-MQ3 | 16.02 | - | 6:52 | 6:52 | 6:52 | 6:53 | 6:53 |
| MQ1-MQ3 | 28.02 | 6:53 | - | - | - | - | - |
| MQ1-MQ3 | 28.02 | - | 7:36 | 7:36 | 7:36 | - | - |
| MQ1-MQ3 | 28.02 | 7:55 | - | - | - | - | - |
| MQ3-MQ5 | 07.11 | - | 6:02 | 6:03 | 6:04 | 6:07 | 6:08 |
| MQ3-MQ5 | 07.11 | 6:31 | 6:29 | 6:29 | 6:30 | | - |
| MQ3-MQ5 | 16.02 | 6:03 | 6:05 | 6:05 | 6:05 | 6:05 | - |
| MQ3-MQ5 | 16.02 | 6:54 | - | - | - | - | - |
| MQ3-MQ5 | 16.02 | 8:21 | 8:18 | 8:19 | 8:19 | 8:20 | 8:21 |
| MQ3-MQ5 | 16.02 | - | 8:59 | 8:59 | 8:59 | 8:59 | - |
| MQ3-MQ5 | 28.02 | 6:03 | 6:12 | 6:13 | 6:14 | 6:16 | - |
| MQ3-MQ5 | 28.02 | - | 6:32 | 6:32 | 6:32 | 6:32 | 6:33 |
| MQ3-MQ5 | 28.02 | 6:54 | - | - | - | - | - |
| MQ3-MQ5 | 28.02 | 8:21 | 8:23 | 8:24 | 8:30 | 8:30 | 8:32 |
| MQ9-MQ11 | 16.02 | - | 6:10 | 6:11 | 6:11 | - | - |
| MQ9-MQ11 | 16.02 | 6:24 | 6:28 | - | - | - | - |
| MQ9-MQ11 | 16.02 | - | 6:38 | 6:43 | 6:49 | 6:51 | 6:56 |
| MQ9-MQ11 | 07.11 | 6:31 | 6:38 | - | - | - | - |
| MQ9-MQ11 | 07.11 | 6:57 | 6:55 | 6:56 | 6:57 | 6:58 | 7:00 |
Die Ergebnisse der Analyse zeigen, daß in den exemplarisch
betrachteten Situationen von den 15 Störfällen, die das MML-Verfahren
bei normalem Abstand erkannte, vom Kalmanfilter 11
auch bei größerem Abstand etwa zeitgleich detektiert werden
(dies entspricht einer Detektionsrate von ca. 73 %); weiterhin
erkennt das Verfahren 9 andere kritische Verkehrszustände,
die aus den Basisinformationen zwar nicht als Störfall
eingeordnet sind (Polizeimeldung fehlt, keine Detektion durch
konventionelles oder MML-Verfahren), aufgrund der Datenlage
aber eindeutig Situationen mit kritischem Verkehrsablauf entsprechen.
(Diese Fälle wurden bei den kurzen Abschnittslängen
vom MML-Verfahren in der übergeordneten Logik offensichtlich
aussortiert, da sie nicht eindeutig dem Muster einer vordefinierten
charakteristischen Verkehrssituation zuordbar waren.)
Bezogen auf die gesamte Stichprobe ergibt sich eine Detektionsrate
von ca. 83 %.
Bezüglich der mittleren Erkennungszeit läßt sich feststellen,
daß diese bei den in beiden Fällen detektierten Situationen
im Mittel ca. 1,6 Minuten länger wird, als bei kürzerem Abstand
mit MML-Verfahren.
Zusammenfassend kann festgehalten werden, daß eine zuverlässige
Detektion der schweren Verkehrsstörungen sowie kritischer,
instabiler Verkehrsabläufe auch bei vergrößertem
Meßquerschnittsabstand möglich ist. Die Detektionszeiten erhöhen
sich dabei in Abhängigkeit vom Verkehrszustand geringfügig.
.Allerdings sollten die Ergebnisse des Kalmanfilters
möglichst durch eine Nachbearbeitung (MML-Verfahren) ergänzt
und bezüglich ihrer Zuordnung zu Verkehrssituationen abgesichert
werden. Dies wäre durch entsprechende Neuparametrierung
des MML-Verfahrens problemlos zu erreichen.
Die Beispielsergebnisse weisen eine eindeutig höhere Detektionsqualität
des MML-Verfahrens gegenüber dem konventionellen
Verfahren nach. Insbesondere konnten die folgenden Ergebnisse
ermittelt werden:
- Die Erkennungszeit konnte bei der betrachteten Stichprobe
von 60 Verkehrsstörungen im Durchschnitt um 9,52 Minuten
reduziert werden. Bei den aufgetretenen Verkehrsstärken bedeutet
das, daß bei einem Störfall auf der Autobahn im
Durchschnitt 616 Fahrzeuge (potentielle Stautreffer) zusätzlich
hätten gewarnt werden können.
- Gleichzeitig konnte auch die Detektionsrate durch das MML-Verfahren
verbessert werden. (Von den 60 betrachteten Verkehrsstörungen
wurden lediglich 3 nicht erkannt, dies entspricht
einer Detektionsrate von 95%, gegenüber 91% mit
konventionellem Verfahren).
- Die Fehlalarmquote konnte wegen der begrenzten Möglichkeit
zur Datenerfassung nicht zufriedenstellend ermittelt werden.
Während der Dauer der durchgeführten Videoaufnahmen
wurde jedoch kein Fehlalarm des MML-Verfahrens festgestellt;
das heißt, jede Alarmmeldung des Verfahrens entsprach
auch einer tatsächlichen Verkehrsstörung.
- Das Verhalten des MML-Verfahrens bei vergrößertem Abstand
zwischen benachbarten Meßquerschnitten wurde mit Hilfe eines
der Basismodule (dem Kalmanfilter zur Zustandsschätzung)
grob abgeschätzt. (Eine detaillierte Untersuchung war
aufgrund der dafür zunächst erforderlichen Neuparametrierung
im Rahmen dieser Arbeit nicht möglich.) Dabei konnte
nach den ersten Ergebnissen ein zufriedenstellendes Verhalten
des Kalmanfilters auch bei größerem Abstand der
Meßquerschnitte bestätigt werden.
In Fig. 5 ist die Auswertung des Kalmanfilter-Störzuflusses
am Meßquerschnitt MQ1 am 16.02.1996 dargestellt.
In Fig. 6 ist die Auswertung des Kalmanfilter-Störzuflusses
am Meßquerschnitt MQ3 am 16.02.1996 dargestellt.