EP0872585B1 - Schaftwebmaschine und Verfahren zur Regelung einer Schaftwebmaschine - Google Patents
Schaftwebmaschine und Verfahren zur Regelung einer Schaftwebmaschine Download PDFInfo
- Publication number
- EP0872585B1 EP0872585B1 EP97810245A EP97810245A EP0872585B1 EP 0872585 B1 EP0872585 B1 EP 0872585B1 EP 97810245 A EP97810245 A EP 97810245A EP 97810245 A EP97810245 A EP 97810245A EP 0872585 B1 EP0872585 B1 EP 0872585B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- dobby
- drive train
- drive
- torque
- loom
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 238000000034 method Methods 0.000 title claims description 4
- 238000009941 weaving Methods 0.000 claims description 45
- 230000033228 biological regulation Effects 0.000 claims description 7
- 230000005540 biological transmission Effects 0.000 claims description 7
- 230000009347 mechanical transmission Effects 0.000 claims description 5
- 238000006243 chemical reaction Methods 0.000 claims description 2
- 230000008878 coupling Effects 0.000 description 10
- 238000010168 coupling process Methods 0.000 description 10
- 238000005859 coupling reaction Methods 0.000 description 10
- 241000219098 Parthenocissus Species 0.000 description 7
- 230000001105 regulatory effect Effects 0.000 description 4
- 238000010521 absorption reaction Methods 0.000 description 3
- 238000011217 control strategy Methods 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- 241001295925 Gegenes Species 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 230000002787 reinforcement Effects 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000001419 dependent effect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000005265 energy consumption Methods 0.000 description 1
- ZINJLDJMHCUBIP-UHFFFAOYSA-N ethametsulfuron-methyl Chemical compound CCOC1=NC(NC)=NC(NC(=O)NS(=O)(=O)C=2C(=CC=CC=2)C(=O)OC)=N1 ZINJLDJMHCUBIP-UHFFFAOYSA-N 0.000 description 1
- 239000004744 fabric Substances 0.000 description 1
- 235000015095 lager Nutrition 0.000 description 1
Images

Classifications
-
- D—TEXTILES; PAPER
- D03—WEAVING
- D03C—SHEDDING MECHANISMS; PATTERN CARDS OR CHAINS; PUNCHING OF CARDS; DESIGNING PATTERNS
- D03C1/00—Dobbies
- D03C1/14—Features common to dobbies of different types
- D03C1/16—Arrangements of dobby in relation to loom
-
- D—TEXTILES; PAPER
- D03—WEAVING
- D03D—WOVEN FABRICS; METHODS OF WEAVING; LOOMS
- D03D51/00—Driving, starting, or stopping arrangements; Automatic stop motions
- D03D51/007—Loom optimisation
Definitions
- the invention relates to a dobby loom and a Method for controlling a dobby loom according to the Preamble of the respective independent patent claim.
- Known dobby looms include a loom for Entry of a weft as well as a dobby as Device for forming the shed.
- the weaving machine and the dobby are usually about one Transmission device, for example via a Coupling and a gearbox, can be coupled and have a common in the coupled state Powertrain on.
- This common driveline will by means of a drive - usually by means of a Motors - in turn drives and drives both Loom as well as the dobby.
- Shaft weaving machines of this type have the disadvantage that that an engine with high power output is required is, especially when driving a large one Dobby (e.g. due to a large number heavy heald frames or through a large weave width). Furthermore varies both in the weaving machine as well with the dobby the freewheel required Torque, depending on the angle of rotation (current circulation position). Most of all, this will be caused by various oscillating mass-related components of the individual machines. With increasing size of the dobby and with the increasing speed of the weaving machine increases this induced load on the entire drive train, especially between the loom and Part of the drive train arranged in a dobby, but also the load on the engine. In addition comes that the required torque is additional depends on other operating parameters, e.g. of the Speed, of the type of fabric or of the fabricated Template.
- one of the drive of the Auxiliary motor for the weaving machine Jacquard device and provide the drive shaft the loom with the drive shaft of the Jacquard device via a synchronization wave couple.
- the drive shaft is by means of this auxiliary motor the jacquard device can also be driven.
- the Auxiliary motor is used - with appropriate control Relief of the drive of the weaving machine, as well as Relief of the entire drive train. At the same time provides the synchronization wave for a more or less good synchronization of weaving machine and Jacquard facility.
- an angle encoder provided that the respective circulation position of the The drive shaft of the jacquard device is detected and feeds a controller.
- the controller determines-in Knowledge of the desired weaving pattern and knowledge the torques required at the respective angle of rotation (The required torques must therefore be the control for every angle of rotation before the machine starts be known) - that to be applied by the auxiliary engine Torque to drive the loom as well relieve the entire drive train.
- the shaft loom according to the invention is the sensor or Parts of it (e.g. a strain gauge arrangement) arranged the drive train.
- the sensor or Parts of it e.g. a strain gauge arrangement
- the representative size for that at the respective time torque applied directly on the drive train are and will not be falsified.
- the torque does not have to be on any elaborate detours can be determined.
- a sensor that comes into question in particular is the an electrical signal in function of the actually torque applied, so for example a Sensor comprising a strain gauge assembly.
- the strain gauge arrangement is directly on arranged the drive train.
- the sensor has to also a suitable transmission element (a Transmitter) for transmitting the signal from the in operation rotating drive train to one in operation have fixed machine parts.
- a Strain gauge assembly located on the drive train is arranged, is therefore particularly suitable to detect the torque because its output signal is directly proportional to the torque applied (Alternatively, sensors are also suitable for measuring Shear stresses). The applied torque can thus quickly and unadulterated from the sensor signal be won.
- At least one sensor between the loom and the dobby or in this area adjacent end regions of the weaving machine and the Dobby is arranged on the drive train applied torque and a corresponding Signal fed to a regulation. Because of this signal the auxiliary drive is controlled by the control that fluctuations in between the weaving machine and the Torque applied to the dobby. This eliminates the effort already mentioned above reinforcement of the main drive and parts of the Drive train, especially of shafts, bearings, Gearboxes and clutches avoided.
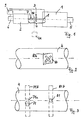
- the output signal of sensors 7 and 8 is fed to control 9 by means of signal lines, which in turn the motor 6 via a signal line 10, that is, the auxiliary drive.
- the control of the Motor 6 through the control 9 takes place so that Fluctuations in between the weaving machine 1 and the Dobby 2 applied torque and / or Fluctuations in the speed can be reduced.
- the solution according to the invention is also regarding of the total energy consumption (this is the one to be used Total power required for the generation of the Torque is required), cheap. This depends causally related to the mechanical coupling.
- the energy would have to Synchronization of the two machines completely from the Drives of the machines are provided (at opposing movement tendencies would have to be Driving motor braking, the other driving act), which with corresponding implementation losses (at the motors).
- Driving motor braking the other driving act
- the mechanical Coupling are the same Movement tendencies at least partially over the mechanical coupling of loom and dobby from (which manifests itself e.g. in a torsion).
- a Doom loom with mechanical coupling between So loom and dobby is in this case cheaper than a shaft loom without mechanical Coupling.
- a sensor applied to part 4 of the drive train that includes a strain gauge assembly.
- a sensor On such a sensor is shown in principle in FIG. 2 (greatly enlarged).
- the rest position 80a is included shown in dashed lines in Fig. 2.
- the output signal of the Strain gauge assembly 80 is a measure of that Torsion of part 4 of the drive train and the torsion part 4 of the drive train is again a measure of the applied torque.
- FIG. 5 shows another gear 14a, such as it also between the weaving machine 1 and the part 4 of the drive train can be provided.
- the two Parts of the drivetrain are only excerpts here indicated, one recognizes an end piece 10a of the Weaving machine 1 coming part of the drive train and a End piece 40a of between loom 1 and Dobby 2 provided part 4 of the drive train.
- the two end pieces are again in bearings 11a and 41a guided and by means of the radially interlocking Gears 12a and 42a mechanically coupled together.
- a force or a torque from the gear 12a transferred to the gear 42a, so the part 4 of the Want to dodge drivetrain, but from the camp 41a prevented.
- a force absorption sensor see Fig. 6
- FIG. 6 finally shows schematically a sensor 72, which, for example, on bearings 11 and 11a (Fig. 4, Fig. 5) can be provided.
- a sensor 72 acts when transmitting a force or a torque on part 4 of the drive train Force on the bearing 41 or 41a, since the drive train in the camp is led and can not evade.
- the forces acting on the bearing 41a can be directed in the direction of arrows F1 and F2 detected by sensor 72 and open this way determines the force or torque be the corresponding force on the bearing caused.
Landscapes
- Engineering & Computer Science (AREA)
- Textile Engineering (AREA)
- Looms (AREA)
Description
- Fig. 1
- ein Ausführungsbeispiel einer erfindungsgemässen Schaftwebmaschine,
- Fig. 2
- einen Ausschnitt des Antriebsstrangs, auf welchem eine Dehnungsmessstreifenanordnung befestigt ist,
- Fig. 3
- einen Ausschnitt des Antriebsstrangs mit zwei in Längsrichtung des Antriebsstrangs versetzt angeordneten Winkelgebern,
- Fig. 4
- ein Ausführungsbeispiel eines Getriebes mit Lagern, an welchen durch das Drehmoment Kräfte hervorgerufen werden,
- Fig. 5
- ein weiteres Ausführungsbeispiel eines Getriebes mit Lagern
- Fig. 6
- eine vergrösserte Darstellung eines Lagers mit einem Kraftaufnahme-Sensor.
Claims (7)
- Schaftwebmaschine umfassend eine Webmaschine (1) und eine Schaftmaschine (2), die über eine mechanische Transmissionsvorrichtung (3) miteinander koppelbar sind und im gekoppelten Zustand einen gemeinsamen Antriebsstrang aufweisen, der von einem Hauptantrieb (5) antreibbar ist, sowie mit einem Hilfsantrieb (6), der zumindest auf den die Schaftmaschine (1) antreibenden Teil des Antriebsstrangs wirkend angeordnet ist, dadurch gekennzeichnet, dass mindestens ein Sensor (7,8), welcher das tatsächlich am Antriebsstrang anliegende Drehmoment erfasst, im Bereich zwischen der Webmaschine (1) und der Schaftmaschine (2) oder im jeweils an diesen Bereich angrenzenden Endbereich der Webmaschine (1) bzw. der Schaftmaschine (2) entlang des Antriebsstrangs angeordnet ist, und dass dieser Sensor (7,8) mit einer Regelung (9) verbunden ist, welche den Hilfsantrieb (6) so ansteuert, dass des zwischen der Webmaschine (1) und der Schaftmaschine (2) anliegende Drehmoments und/oder Schwankungen der Drehzahl reduziert werden.
- Schaftwebmaschine nach Anspruch 1, dadurch gekennzeichnet, dass der Sensor (7,8) oder Teile davon auf dem Antriebsstrang angeordnet ist.
- Schaftwebmaschine nach Anspruch 2, dadurch gekennzeichnet, dass der Sensor eine Dehnungsmessstreifenanordnung (80) und ein geeignetes Übertragungselement zum Übertragen des Signals vom Antriebsstrang zu einem beim Betrieb feststehenden Maschinenteil umfasst.
- Schaftwebmaschine nach einem der Ansprüche 1 oder 2, dadurch gekennzeichnet, dass mindestens zwei Sensoren vorgesehen sind, die als Winkelgeber (71,81) ausgebildet und in Längsrichtung des Antriebsstrangs betrachtet zueinander versetzt angeordnet sind.
- Schaftwebmaschine nach Anspruch 1, dadurch gekennzeichnet, dass der Sensor als Kraftaufnahme-Sensor (72) ausgebildet und so angeordnet ist, dass er die von dem anliegenden Drehmoment hervorgerufenen Reaktionskräfte an einem beim Betrieb feststehenden Teil (41,41a) der Schaftwebmaschine erfasst.
- Schaftwebmaschine nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, dass sie zusätzlich zum Hauptantrieb (5) und zum Hilfsantrieb (6) noch einen weiteren, an den die Schaftmaschine antreibenden Teil des Antriebsstrangs ankoppelbaren Antrieb (ZA) aufweist.
- Verfahren zur Regelung einer Schaftwebmaschine, welche eine Webmaschine (1) und eine Schaftmaschine (2) umfasst, die über eine mechanische Transmissionsvorrichtung (3) miteinander koppelbar sind und im gekoppelten Zustand einen gemeinsamen Antriebsstrang aufweisen, der beim Betrieb von einem Hauptantrieb (5) angetrieben wird, sowie mit einem Hilfsantrieb (6), der zumindest auf den die Schaftmaschine (2) antreibenden Teil des Antriebsstrangs einwirkt, dadurch gekennzeichnet, dass mittels mindestens eines Sensors (7,8), der zwischen der Webmaschine (1) und der Schaftmaschine (2) oder in den an diesen Bereich angrenzenden Endbereichen der Webmaschine (1) und der Schaftmaschine (2) entlang des Antriebsstrangs angeordnet ist, das tatsächlich am Antriebsstrang anliegende Drehmoment erfasst wird und ein entsprechendes Signal einer Regelung (9) zugeführt wird, aufgrund dessen der Hilfsantrieb (6) von der Regelung (9) so angesteuert wird, dass das zwischen der Webmaschine (1) und der Schaftmaschine (2) anliegenden Drehmoments und/oder Schwankungen der Drehzahl reduziert werden.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP97810245A EP0872585B1 (de) | 1997-04-16 | 1997-04-22 | Schaftwebmaschine und Verfahren zur Regelung einer Schaftwebmaschine |
| US09/059,660 US6186184B1 (en) | 1997-04-16 | 1998-04-13 | Heald loom and a method for regulating a heald loom |
| JP10102704A JPH10325034A (ja) | 1997-04-16 | 1998-04-14 | ヘルド織機及びヘルド織機の制御方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP97810234 | 1997-04-16 | ||
| EP97810234 | 1997-04-16 | ||
| EP97810245A EP0872585B1 (de) | 1997-04-16 | 1997-04-22 | Schaftwebmaschine und Verfahren zur Regelung einer Schaftwebmaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0872585A1 EP0872585A1 (de) | 1998-10-21 |
| EP0872585B1 true EP0872585B1 (de) | 2000-07-19 |
Family
ID=26148018
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP97810245A Expired - Lifetime EP0872585B1 (de) | 1997-04-16 | 1997-04-22 | Schaftwebmaschine und Verfahren zur Regelung einer Schaftwebmaschine |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6186184B1 (de) |
| EP (1) | EP0872585B1 (de) |
| JP (1) | JPH10325034A (de) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| BE1011560A3 (nl) * | 1997-11-21 | 1999-10-05 | Picanol Nv | Weefmachine en werkwijze voor het sturen en/of het starten en/of het stoppen van een aandrijfmotor. |
| DE19960928C2 (de) * | 1999-12-17 | 2002-04-25 | Dornier Gmbh Lindauer | Vorrichtung zum Herstellen einer Antriebsverbindung zwischen einer Schaftmaschine und artverschiedenen Fachbildemaschinen |
| DE10061717B4 (de) * | 2000-12-12 | 2006-01-26 | Lindauer Dornier Gmbh | Antriebsanordnung für eine Webmaschine und Fachbildemaschine |
| DE502006006342D1 (de) * | 2006-10-06 | 2010-04-15 | Groz Beckert Kg | Schaftgetriebe für eine Webmaschine |
| CN101070658B (zh) * | 2007-04-29 | 2010-11-17 | 江苏万工科技集团有限公司 | 喷气织机的打纬力矩自动调节装置 |
| EP2226766A3 (de) * | 2009-03-02 | 2014-06-11 | Sikorsky Aircraft Corporation | Rotorsystem-Gesundheitsüberwachung mit Schaftbelastungsmessungen und virtuelle Überwachung von Lasten |
| CN108350620B (zh) * | 2015-08-26 | 2020-03-24 | 必佳乐公司 | 具有传感器装置的用于驱动纺织机综框的驱动机构 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2660672B1 (fr) * | 1990-04-06 | 1992-08-28 | Staubli Sa Ets | Systeme pour l'entrainement d'une machine pour la formation de la foule sur une machine a tisser. |
| EP0504105B1 (de) * | 1991-03-13 | 1997-10-15 | DE FRIES, Jan Richard | Elektromotorisches Antriebssystem für periodisch arbeitende Maschinen mit drehwinkelabhängig variablem Drehmoment |
| JP3595357B2 (ja) * | 1994-06-30 | 2004-12-02 | ファナック株式会社 | ディジタルサーボによるタンデム制御方法 |
| FR2732698B1 (fr) * | 1995-04-05 | 1997-05-23 | Staubli Sa Ets | Systeme pour l'entrainement des mecaniques pour la formation de la foule sur les metiers a tisser |
| JPH08302545A (ja) * | 1995-05-12 | 1996-11-19 | Tsudakoma Corp | 織機の駆動機構 |
| DE59607360D1 (de) * | 1996-04-04 | 2001-08-30 | Sulzer Textil Ag Rueti | Jacquardwebmaschine und Verfahren zum Betrieb derselben |
-
1997
- 1997-04-22 EP EP97810245A patent/EP0872585B1/de not_active Expired - Lifetime
-
1998
- 1998-04-13 US US09/059,660 patent/US6186184B1/en not_active Expired - Fee Related
- 1998-04-14 JP JP10102704A patent/JPH10325034A/ja not_active Withdrawn
Also Published As
| Publication number | Publication date |
|---|---|
| US6186184B1 (en) | 2001-02-13 |
| JPH10325034A (ja) | 1998-12-08 |
| EP0872585A1 (de) | 1998-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO1999060362A1 (de) | Verspannungsprüfstand für hubschraubergetriebe | |
| EP1763601B1 (de) | Antrieb für eine webmaschine | |
| DE2336896A1 (de) | Verfahren sowie verfahren zum anziehen eines befestigungselementes mit einem steifigkeits-messgeraet | |
| EP2762438B1 (de) | Verfahren zur Beeinflussung einer auf einen Seiltrieb wirkenden Seilwindenkraft und Vorrichtung zur Durchführung eines derartigen Verfahrens | |
| EP0872585B1 (de) | Schaftwebmaschine und Verfahren zur Regelung einer Schaftwebmaschine | |
| EP1266988A2 (de) | Antrieb für eine Webmaschine | |
| EP0726345A1 (de) | Antrieb für eine Webmaschine | |
| EP0799920B1 (de) | Jacquardwebmaschine und Verfahren zum Betrieb derselben | |
| WO2018086925A1 (de) | Antriebseinrichtung für ein kraftfahrzeug, entsprechendes kraftfahrzeug sowie verfahren zum betreiben einer antriebseinrichtung | |
| WO2008000535A1 (de) | Vorrichtung zum erzeugen von schwingungen | |
| EP1357309A2 (de) | Verfahren zur Steuerung eines Anfahrvorgangs mit einem Doppelkupplungsgetriebe | |
| DE19914131A1 (de) | Verfahren zum Anwerfen von mit einem elektromotorischen Hauptantrieb ausgerüsteten Webmaschinen | |
| EP0893525A1 (de) | Antriebsanordnung für eine Webmaschine und Webmaschine mit Antriebsanordnung | |
| WO2006032233A1 (de) | Webblatt-antrieb einer webmaschine | |
| DE9409109U1 (de) | Zentrifuge mit stufenloser Steuerung der Differenzdrehzahl zwischen Trommel und Räumwerkzeug | |
| DE102007008613B4 (de) | Antriebsvorrichtung sowie Verfahren zum Antreiben eiens Fahrzeugs | |
| DE3787039T2 (de) | Transmission für Webmaschinen. | |
| DE102008046846A1 (de) | Verfahren und Steuereinrichtung zur Steuerung eines Verbrennungsmotors eines Triebstrangs eines Kraftfahrzeugs | |
| DE102008020578B4 (de) | Verfahren zum Steuern einer Kupplungsanordnung | |
| EP3710299B1 (de) | Verfahren zur ermittlung von kupplungsparametern eines mindestens eine kupplung aufweisenden automatikgetriebes | |
| DE102017201753A1 (de) | Verfahren und Steuergerät zum Erkennen der Schaltstellung eines formschlüssigen Schaltelements eines Getriebes | |
| DE128980T1 (de) | Antriebsgetriebe fuer maschinen. | |
| DE102017221224B3 (de) | Einrichtung und Verfahren zum Herstellen von Gewebe mit einer Webmaschine und zwei Jacquardmaschinen | |
| DE102014016450B3 (de) | Verfahren zum Betreiben eines Mehrachsantriebsstrangs für ein Kraftfahrzeug sowie entsprechender Mehrachsantriebsstrang | |
| DE19535333B4 (de) | Antriebsvorrichtung für eine Doppelteppichwebmaschine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A1 Designated state(s): BE CH DE GB IT LI SE |
|
| AX | Request for extension of the european patent |
Free format text: AL;LT;LV;RO;SI |
|
| 17P | Request for examination filed |
Effective date: 19990324 |
|
| AKX | Designation fees paid |
Free format text: BE CH DE GB IT LI SE |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| 17Q | First examination report despatched |
Effective date: 19990706 |
|
| RAP1 | Party data changed (applicant data changed or rights of an application transferred) |
Owner name: SULZER TEXTIL AG |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): BE CH DE GB IT LI SE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: SULZER MANAGEMENT AG Ref country code: CH Ref legal event code: EP |
|
| GBT | Gb: translation of ep patent filed (gb section 77(6)(a)/1977) |
Effective date: 20000719 |
|
| REF | Corresponds to: |
Ref document number: 59702052 Country of ref document: DE Date of ref document: 20000824 |
|
| ITF | It: translation for a ep patent filed | ||
| EN | Fr: translation not filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: GB Ref legal event code: IF02 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: CH Payment date: 20020319 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 20020327 Year of fee payment: 6 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 20020402 Year of fee payment: 6 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030422 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030423 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030430 Ref country code: CH Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20030430 |
|
| EUG | Se: european patent has lapsed | ||
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 20030422 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20050418 Year of fee payment: 9 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 20050509 Year of fee payment: 9 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: BE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20060430 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: IT Payment date: 20060430 Year of fee payment: 10 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20061101 |
|
| BERE | Be: lapsed |
Owner name: *SULZER TEXTIL A.G. Effective date: 20060430 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: IT Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20070422 |