EP0800876A2 - Richtmaschine - Google Patents
Richtmaschine Download PDFInfo
- Publication number
- EP0800876A2 EP0800876A2 EP97105817A EP97105817A EP0800876A2 EP 0800876 A2 EP0800876 A2 EP 0800876A2 EP 97105817 A EP97105817 A EP 97105817A EP 97105817 A EP97105817 A EP 97105817A EP 0800876 A2 EP0800876 A2 EP 0800876A2
- Authority
- EP
- European Patent Office
- Prior art keywords
- straightening
- machine according
- units
- adjusting
- straightening machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B21—MECHANICAL METAL-WORKING WITHOUT ESSENTIALLY REMOVING MATERIAL; PUNCHING METAL
- B21F—WORKING OR PROCESSING OF METAL WIRE
- B21F1/00—Bending wire other than coiling; Straightening wire
- B21F1/02—Straightening
Definitions
- the invention relates to a straightening machine for aligning wire with a straightening set which comprises a plurality of straightening units which can be adjusted in their radial position relative to the longitudinal axis of the straightening set.
- a straightening machine with adjustable straightening units is known from EP-A1-620-058.
- the straightening set is formed by a rotor which can be rotated about its longitudinal axis by a rotary drive and which, as straightening units, comprises straightening nozzles through which the wire to be aligned is guided.
- the directional nozzles are mounted so as to be radially displaceable and their position can be adjusted jointly via a displacement element which has inclined planes which act laterally on the holders of the directional nozzles.
- the disadvantage of this device is that the rotor has a relatively high weight and thus a high moment of inertia when accelerating or braking, that the adjustment is relatively coarse and that an adjustment to the properties of the wire (for example its internal stresses depending on the type of manufacture) only is possible to a limited extent.
- the straightening nozzles are individually manually adjusted, which of course involves a lot of work. It is therefore common to provide several rotors set to different wire diameters, which can be replaced if necessary.
- a straightening machine is known from EP-A1-619 154, in which the straightening set is formed by a plurality of straightening rollers, of which every second straightening roller can be adjusted in its radial position via an adjusting knob. With this straightening machine, too, the changeover to a different wire diameter is labor-intensive.
- the object of the invention is to provide a novel straightening machine, by means of which the disadvantages of the previously known straightening machines are overcome and which can be quickly and precisely reproducibly adjusted to different wire diameters.
- this is achieved in a straightening machine of the type mentioned at the outset by the fact that the radial positions of individual straightening units of the straightening set can be adjusted remotely via the adjusting device, the adjusting device having at least one adjusting unit which is decoupled from a first passive position in which it is decoupled from the straightening units , can be transferred into a second active position in which it is in engagement with at least one straightening unit for adjusting the same.
- the invention can be used in straightening machines with a roller straightening set, in which the straightening units are formed by rollers between which the wire is guided.
- straightening nozzles through which the wire is guided are provided as straightening units. Because the actuating units are decoupled from the straightening units during operation of the straightening machines, the rotating mass can be kept low.
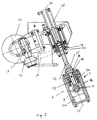
- the straightening machine shown in FIGS. 1 to 3 has a rotor 2 which is rotatably mounted about the axis 1 and which contains the straightening units 3.
- the rotor 2 is driven by a motor 6 via V-belts 4 and associated V-shafts 5.
- the wire to be aligned is drawn off from a coil and along the rotor of the straightening machine guided. As a result, the aligned wire can be cut to a straight round steel rod.
- the straightening set 7 comprises five straightening units 3 designed as straightening nozzles 8, which are fixed in the rotor 2 with respect to their axial position and radially, i.e. can be individually adjusted by an adjusting device 10 perpendicular to the longitudinal axis 1 of the straightening set 7.
- the directional nozzle 8 has a nozzle plate 9 which contains the actual nozzle 11.
- the nozzle plate 9 is slidably mounted in the nozzle frame 12 via guide strips 12a which engage in guide grooves of the nozzle plate 9.
- the radial adjustment of the straightening nozzle 8 takes place via a spindle drive 13. This is formed by a hollow thread 9a contained in the nozzle plate 9 and an adjusting screw 14 mounted in the nozzle frame 12.
- a latching device 15 (see FIG. 2) is provided, which has a latching ring 16 rigidly connected to the adjusting screw 14 and provided with radial bores and spring balls which are mounted in a bolt 17 and are under spring force includes, which can snap into the holes in the locking ring.
- the locking device achieves a defined angular position of the adjusting screw 14.
- a sealing sleeve 18 pinned to the adjusting screw 14 is provided in order to prevent the ingress of dirt.
- the actuating device 10 comprises a plurality of actuating units 20 assigned to the straightening units 3, one actuating unit 20 being provided for each straightening unit 3.
- the actuating units 20 are driven together via a chain 21, which is driven by an actuator motor 23 via a chain wheel 22.
- the adjusting units 20 have adjusting shafts 24, the adjusting nuts 25 of which can be brought into engagement with the adjusting screws 14.
- clamping couplings are provided which comprise wedge sleeves 27 driven by the chain 21 via chain wheels 26, in which the adjusting shafts 24, are designed as spline shafts are stored.
- the adjusting shafts 24 are therefore mounted in the wedge sleeves 27 in a rotationally fixed manner but axially displaceable by pneumatic piston-cylinder units 28 and can move from the piston-cylinder units 28 from a first passive position into a second active position in which they are engaged with the respective adjusting screw. be transferred.
- the setting of the actuating units is carried out by first bringing the rotor into the setting position in which the displacement axis 29 of the respective directional nozzle 8 coincides with the axis 30 of the actuating unit 20.
- one of the adjusting shafts 24 is lowered into the active position by means of the piston-cylinder unit 28 until the adjusting nut 25 is seated on the adjusting screw 14.
- the adjusting screw is now rotated by the desired angular range via the actuator motor 23.
- a rotary encoder 31 can be provided for monitoring and recording the rotary movement of the adjusting screw 14.
- a stepping motor can also be provided as the actuator motor 23, which can be rotated by a defined angular amount, so that in this case no rotary encoder is necessary. In this way, a defined position of the nozzle 11 can be approached and stored in an electronic memory of a control device.
- the actuating shaft 24 is then retracted. The process can then be repeated for all straightening nozzles 8.
- the setting process can be controlled by a user via a control panel.
- a control device which automatically and automatically executes the entire setting process based on previously stored setting values.
- An important advantage of the straightening machine according to the invention is that the rotating masses of the adjustable rotor are only slightly higher than in conventional rotors that cannot be adjusted remotely.
- the rotor can also have straightening rollers instead of straightening nozzles over which the wire is guided.
- the surface of such a straightening roller generally has a concave, approximately parabolic profile.
- the straightening rollers can in turn be adjusted in their radial positions via spindle drives and an adjusting device is provided for individually adjusting the radial positions of the straightening rollers, which corresponds to that described above.
- the idea according to the invention of providing an adjusting device for the remote-controlled or controlled adjustment of the radial bearings of the straightening units is not restricted to straightening machines with a rotor straightening set, but can also be used for straightening machines with a fixed roller straightening set, as shown in FIG. 4.
- the actuating units 20 of the actuating device 10 are only individually assigned to the upper six rollers 40 here.
- the lower five rollers 40 could also be individually adjustable.
- the actuating device 10 in turn functions in exactly the same way as described above and a spindle drive can again be provided for the radial adjustment of the rollers 40.
- two of the straightening sets shown in FIG. 4 are preferably used, which are perpendicular to one another and through which the wire passes in succession.
Abstract
Description
- Die Erfindung betrifft eine Richtmaschine zum Ausrichten von Draht mit einem Richtsatz, der mehrere in ihrer radialen Lage relativ zur Längsachse des Richtsatzes einstellbare Richteinheiten umfaßt.
- Eine Richtmaschine mit einstellbaren Richteinheiten ist aus der EP-A1-620-058 bekannt. Bei dieser Richtmaschine wird der Richtsatz von einem Rotor gebildet, der von einem Drehantrieb um seine Längsachse drehbar ist und der als Richteinheiten Richtdüsen umfaßt, durch die der auszurichtende Draht geführt wird. Die Richtdüsen sind radial verschiebbar gelagert und sie können in ihrer Lage gemeinsam über ein Verschubelement eingestellt werden, das schiefe Ebenen aufweist, die seitlich an den Haltern der Richtdüsen angreifen.
- Nachteilig ist bei dieser Einrichtung, daß der Rotor ein relativ hohes Gewicht und somit ein hohes Trägheitsmoment beim Beschleunigen bzw. Bremsen aufweist, daß die Verstellung relativ grob ist und daß eine Anpassung an die Eigenschaften des Drahtes (z.B. dessen innere Spannungen je nach Herstellungsart) nur begrenzt möglich ist.
- Bei anderen herkömmlichen Richtmaschinen werden die Richtdüsen einzeln manuell verstellt, was natürlich einen hohen Arbeitsaufwand mit sich bringt. Man sieht daher üblicherweise mehrere auf verschiedene Drahtdurchmesser eingestellte Rotoren vor, die bei Bedarf ausgetauscht werden.
- Aus der EP-A1-619 154 ist eine Richtmaschine bekannt, bei der Richtsatz von mehreren Richtrollen gebildet wird, von denen jede zweite Richtrolle über einen Stellknopf in ihrer radialen Lage einstellbar ist. Auch bei dieser Richtmaschine ist die Umstellung auf einen anderen Drahtdurchmesser arbeitsaufwendig.
- Aufgabe der Erfindung ist es, eine neuartige Richtmaschine bereitzustellen, durch welche die Nachteile der bisher bekannten Richtmaschinen überwunden werden und welche schnell und genau reproduzierbar auf verschiedene Drahtdurchmesser eingestellt werden kann.
- Erfindungsgemäß gelingt dies bei einer Richtmaschine der eingangs genannten Art dadurch, daß die radialen Lagen einzelner Richteinheiten des Richtsatzes über die Stellvorrichtung ferngesteuert einstellbar sind, wobei die Stellvorrichtung zumindest eine Stelleinheit aufweist, die von einer ersten passiven Position, in der sie von den Richteinheiten entkoppelt ist, in eine zweite aktive Position überführbar ist, in der sie mit zumindest einer Richteinheit zur Einstellung derselben in Eingriff steht.
- Aufgrund der fernbedienten bzw. ferngesteuerten Einstellung der Richteinheiten muß sich der Operator nicht in den Gefahrenbereich der Maschine begeben.
- Die Erfindung kann bei Richtmaschinen mit einem Rollenrichtsatz eingesetzt werden, bei dem die Richteinheiten durch Rollen gebildet werden, zwischen denen der Draht geführt ist. In einem bevorzugten Ausführungsbeispiel der Erfindung sind als Richteinheiten Richtdüsen vorgesehen, durch welche der Draht geführt ist. Dadurch, daß die Stelleinheiten beim Betrieb der Richtmaschinen von den Richteinheiten entkoppelt werden, kann die rotierende Masse gering gehalten werden.
- Weitere Vorteile und Einzelheiten der Erfindung werden im folgenden anhand der beiliegenden Zeichnungen erläutert. In dieser zeigt:
- Fig. 1 und Fig. 2 eine Seitenansicht einer erfindungsgemäßen Richtmaschine,
- Fig. 2 eine Draufsicht auf die Richtmaschine von Fig. 1, wobei die Stellvorrichtung weggelassen worden ist,
- Fig. 3 einen Schnitt entlang der Linie AA von Fig. 1 und
- Fig. 4 ein anderes Ausführungsbeispiel der Erfindung.
- Die in den Fig. 1 bis 3 gezeigte Richtmaschine weist einen um die Achse 1 drehbar gelagerten Rotor 2 auf, der die Richteinheiten 3 enthält. Der Rotor 2 wird über Keilriemen 4 und zugehörige Keilwellen 5 von einem Motor 6 angetrieben. Der auszurichtende Draht wird von einem Coil abgezogen und längs durch den Rotor der Richtmaschine geführt. In der Folge kann der ausgerichtete Draht zu einem geraden Rundstahlstab abgelängt werden.
- Der Richtsatz 7 umfaßt im gezeigten Ausführungsbeispiel fünf als Richtdüsen 8 ausgebildete Richteinheiten 3, die bezüglich ihrer axialen Lage im Rotor 2 fixiert sind und radial , d.h. senkrecht zur Längsachse 1 des Richtsatzes 7 von einer Stellvorrichtung 10 einzeln einstellbar sind.
- Die Richtdüse 8 weist eine Düsenplatte 9 auf, die die eigentliche Düse 11 enthält. Die Düsenplatte 9 ist im Düsenrahmen 12 über Führungsleisten 12a, die in Führungsnuten der Düsenplatte 9 eingreifen, verschiebbar gelagert. Die radiale Einstellung der Richtdüse 8 erfolgt über einen Spindeltrieb 13. Dieser wird von einem in der Düsenplatte 9 enthaltenen Hohlgewinde 9a und einer im Düsenrahmen 12 gelagerten Einstellschraube 14 gebildet.
- Um die Einstellschraube gegen ungewolltes Verdrehen im Betrieb der Richtmaschine zu sichern, ist eine Rastvorrichtung 15 (siehe Fig. 2) vorgesehen, welche einen mit der Einstellschraube 14 starr verbundenen und mit radialen Bohrungen versehenen Rastring 16 sowie in einem Bolzen 17 gelagerte unter Federkraft stehende Rastkugeln umfaßt, die in die Bohrungen des Rastringes einrasten können. Neben der Verdrehsicherung wird durch die Rastvorrichtung eine definierte Winkelstellung der Einstellschraube 14 erreicht. Weiters ist eine mit der Einstellschraube 14 verstiftete Dichthülse 18 vorgesehen, um das Eindringen von Schmutz zu verhindern.
- Die Stellvorrichtung 10 umfaßt mehrere den Richteinheiten 3 zugeordnete Stelleinheiten 20, wobei für jede Richteinheit 3 jeweils eine Stelleinheit 20 vorgesehen ist. Die Stelleinheiten 20 werden gemeinsam über eine Kette 21 angetrieben, welche über ein Kettenrad 22 von einem Stellantriebsmotor 23 angetrieben wird.
- Die Stelleinheiten 20 weisen Stellwellen 24 auf, deren Stellnüsse 25 mit den Einstellschrauben 14 in Eingriff gebracht werden können. Zur Übertragung der Drehbewegung auf die Stellwellen 24 sind Klemmkupplungen vorgesehen, die von der Kette 21 über Kettenräder 26 angetriebene Keilmuffen 27 umfassen, in denen die Stellwellen 24, die als Keilwellen ausgebildet sind, gelagert sind. Die Stellwellen 24 sind in den Keilmuffen 27 daher drehfest aber von pneumatischen Kolben-Zylindereinheiten 28 axial verschiebbar gelagert und können von den Kolben-Zylindereinheiten 28 von einer ersten passiven Position in eine zweite aktive Position, in der sie mit der jeweiligen Einstellschraube in Eingriff sind, überführt werden.
- Die Einstellung der Stelleinheiten erfolgt nun dadurch, daß zunächst der Rotor in die Einstellposition, in der sich die Verschiebeachse 29 der jeweiligen Richtdüse 8 mit der Achse 30 der Stelleinheit 20 deckt, gebracht wird. In der Folge wird eine der Stellwellen 24 mittels der Kolben-Zylindereinheit 28 in die aktive Position abgesenkt bis die Stellnuß 25 auf der Einstellschraube 14 sitzt. Über den Stellantriebsmotor 23 wird nun die Einstellschraube um den gewünschten Winkelbereich verdreht. Dabei kann zur Überwachung und Aufnahme der Drehbewegung der Einstellschraube 14 ein Drehgeber 31 vorgesehen sein. Es kann auch als Stellantriebsmotor 23 ein Schrittmotor vorgesehen sein, der um einen definierten Winkelbetrag gedreht werden kann, sodaß in diesem Fall kein Drehgeber nötig ist. Auf diese Weise kann eine definierte Stellung der Düse 11 angefahren werden und in einem elektronischen Speicher einer Steuereinrichtung abgespeichert werden. Anschließend wird die Stellwelle 24 zurückgefahren. Der Vorgang kann in der Folge für alle Richtdüsen 8 wiederholt werden.
- Die Steuerung des Einstellvorganges kann von einem Benutzer über ein Bedienpult vorgenommen werden. Es ist aber auch möglich, eine Steuereinrichtung vorzusehen, die den gesamten Einstellvorgang anhand von zuvor abgespeicherten Einstellwerten automatisch und selbstätig ausführt.
- Da beispielsweise in warmgewalzten und kaltgezogenen Drähten sehr unterschiedliche innere Spannungen auftreten, können einmal gefundene optimale Einstellungen für einen bestimmten Drahttyp und Drahtdurchmesser auf diese Weise einfach reproduziert werden.
- Ein bedeutender Vorteil der erfindungsgemäßen Richtmaschine besteht darin, daß die rotierenden Massen des verstellbaren Rotors nur geringfügig höher sind als bei herkömmlichen nicht ferngesteuert versellbaren Rotoren.
- Der Rotor kann als Richteinheiten anstelle von Richtdüsen auch Richtrollen aufweisen, über die der Draht geführt ist. Die Oberfläche einer solchen Richtrolle weist dabei im allgemeinen eine konkave, in etwa parabolische Profilierung auf. Die Richtrollen sind wiederum über Spindeltriebe in ihren radialen Lagen einstellbar und zum individuellen Einstellen der radialen Lagen der Richtrollen ist eine Stellvorrichtung vorgesehen, die der zuvor beschriebenen entspricht.
- Der erfindungsgemäße Gedanke, eine Stellvorrichtung zum fernbedienbaren bzw. gesteuerten Einstellen der radialen Lager der Richteinheiten vorzusehen, ist nicht auf Richtmaschinen mit einem Rotorrichtsatz beschränkt, sondern auch bei Richtmaschinen mit einem feststehenden Rollenrichtsatz anwendbar, wie in Fig. 4 gezeigt. Die Stelleinheiten 20 der Stellvorrichtung 10 sind hier nur den oberen sechs Rollen 40 individuell zugeordnet. Genausogut könnten auch die unteren fünf Rollen 40 einzeln verstellbar ausgebildet sein. Die Stellvorrichtung 10 funktioniert wiederum auf genau die gleiche Weise wie zuvor beschrieben und zur radialen Verstellung der Rollen 40 kann wiederum ein Spindeltrieb vorgesehen sein. Bevorzugterweise werden in diesem Fall zwei der in Fig. 4 gezeigten Richtsätze verwendet, welche senkrecht aufeinander stehen und die der Draht nacheinander durchläuft.
Claims (21)
- Richtmaschine zum Ausrichten von Draht mit einem Richtsatz (7), der mehrere in ihrer radialen Lage relativ zur Längsachse des Richtsatzes (7) über eine Stellvorrichtung (10) einstellbare Richteinheiten (3) umfaßt, dadurch gekennzeichnet, daß die radialen Lagen einzelner Richteinheiten (3) des Richtsatzes (7) über die Stellvorrichtung (10) ferngesteuert einstellbar sind, wobei die Stellvorrichtung (10) zumindest eine Stelleinheit (20) aufweist, die von einer ersten passiven Position, in der sie von den Richteinheiten (3) entkoppelt ist, in eine zweite aktive Position überführbar ist, in der sie mit zumindest einer Richteinheit (3) zur Einstellung derselben in Eingriff steht.
- Richtmaschine nach Anspruch 1, dadurch gekennzeichnet, daß ein Bedienpult zur Fernbedienung bzw. -steuerung der Stellvorrichtung (10) vorgesehen ist.
- Richtmaschine nach einem der Ansprüche 1 bis 2, dadurch gekennzeichnet, daß eine Steuereinrichtung zur Steuerung der Stellvorrichtung (10) vorgesehen ist, wobei die Richteinheiten (3) von der Steuereinrichtung automatisch in ihrer Lage einstellbar sind.
- Richtmaschine nach Anspruch 3, dadurch gekennzeichnet, daß die Steuereinrichtung einen Speicher zur Speicherung von Einstellungen der Richteinheiten (3) für verschiedene Drähte aufweist.
- Richtmaschine nach einem der Ansprüche 1 bis 4, dadurch gekennzeichnet, daß jeweils ein Spindeltrieb (13) zur radialen Verstellung der Richteinheiten (3) vorgesehen ist.
- Richtmaschine nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, daß der Richtsatz (7) ein Rollenrichtsatz mit mehreren den Draht führenden Rollen (40) als Richteinheiten ist.
- Richtmaschine nach einem der Ansprüche 1 bis 5, dadurch gekennzeichnet, daß der Richtsatz (7) einen drehbar gelagerten Rotor (2) aufweist.
- Richtmaschine nach Anspruch 7, dadurch gekennzeichnet, daß der Rotor mehreren Richtrollen, über die der Draht geführt ist, als Richteinheiten aufweist.
- Richtmaschine nach Anspruch 8, dadurch gekennzeichnet, daß die Richtrollen konkave Oberflächen zur Führung des Drahtes aufweisen.
- Richtmaschine nach Anspruch 7, dadurch gekennzeichnet, daß der Rotor mehreren Richtdüsen (8), durch die der Draht geführt ist, als Richteinheiten (3) aufweist.
- Richtmaschine nach Anspruch 10, dadurch gekennzeichnet, daß die Richtdüse eine Düsenplatte (9) aufweist, welche in einem Düsenrahmen (12) verschiebbar gelagert ist.
- Richtmaschine nach Anspruch 11, dadurch gekennzeichnet, daß der Spindeltrieb (13) von einem in der Düsenplatte (9) enthaltenen Hohlgewinde (9a) und einer im Düsenrahmen (12) gelagerten und in das Hohlgewinde (9a) eingreifenden Einstellschraube (14) gebildet wird.
- Richtmaschine nach Anspruch 12, dadurch gekennzeichnet, daß eine Rastvorrichtung (15) vorgesehen ist, welche in definierte Winkelpositionen der Einstellschraube (14) einrastet und eine Haltekraft zur Sicherung der Einstellschraube (14) gegen ein radiales Verdrehen aufbringt.
- Richtmaschine nach einem der Ansprüche 1 bis 13, dadurch gekennzeichnet, daß die Stellvorrichtung (10) mehrere Stelleinheiten (20), die einzelnen Richteinheiten (3) zugeordnet sind, aufweist.
- Richtmaschine nach Anspruch 15, dadurch gekennzeichnet, daß die Anzahl der Stelleinheiten (20) der Anzahl der Richteinheiten (3) entspricht.
- Richtmaschine nach Anspruch 14 oder 15, dadurch gekennzeichnet, daß die Stelleinheiten (20) jeweils Stellwellen (24) aufweisen, welche synchron von einem Stellantriebsmotor (23), vorzugsweise über eine Kette (21), angetrieben sind.
- Richtmaschine nach Anspruch 16, dadurch gekennzeichnet, daß die Übertragung der Drehbewegung auf die Stellwellen (24) jeweils über eine Klemmkupplung erfolgt, welche vorzugsweise durch Keilmuffen (27), in denen die als Keilwellen ausgebildeten Stellwellen (24) gelagert sind, gebildet ist.
- Richtmaschine nach Anspruch 16 oder 17, dadurch gekennzeichnet, daß die Stellwellen (24) jeweils axial verschiebbar gelagert sind und mittels Axialtrieben von einer ersten passiven Position in eine zweite aktive Position, in der die Einstellung der jeweiligen Richteinheit (3) erfolgt, überführbar sind.
- Richtmaschine nach Anspruch 18, dadurch gekennzeichnet, daß die Axialtriebe jeweils doppelt wirkende Kolben-Zylindereinheiten (28), vorzugsweise Pneumatik-Kolben-Zylindereinheiten, sind.
- Richtmaschine nach Anspruch 18 oder 19, dadurch gekennzeichnet, daß an den freien Enden der Stellwellen (24) mit den Einstellschrauben (14) der Richteinheiten (3) in Eingriff bringbare Stellnüsse (25) vorgesehen sind.
- Richtmaschine nach einem der Ansprüche 1 bis 20, dadurch gekennzeichnet, daß ein Drehgeber zur Überwachung bzw. Aufnahme der von der Stellvorrichtung (10) durchgeführten Einstellung der Richteinheiten (13) vorgesehen ist.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AT67296 | 1996-04-12 | ||
| AT672/96 | 1996-04-12 | ||
| AT0067296A AT408421B (de) | 1996-04-12 | 1996-04-12 | Richtmaschine |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0800876A2 true EP0800876A2 (de) | 1997-10-15 |
| EP0800876A3 EP0800876A3 (de) | 1998-05-20 |
| EP0800876B1 EP0800876B1 (de) | 2000-01-12 |
Family
ID=3496787
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP97105817A Expired - Lifetime EP0800876B1 (de) | 1996-04-12 | 1997-04-09 | Richtmaschine |
Country Status (3)
| Country | Link |
|---|---|
| EP (1) | EP0800876B1 (de) |
| AT (2) | AT408421B (de) |
| DE (1) | DE59700991D1 (de) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0967030A3 (de) * | 1998-06-26 | 2001-04-04 | WITELS APPARATE-MASCHINEN ALBERT GmbH & Co. KG | Verfahren und Vorrichtung zum Einstellen von verstellbaren Rollen eines Richtapparates |
| ITBO20080633A1 (it) * | 2008-10-15 | 2010-04-16 | Schnell Spa | Apparecchiatura per raddrizzare profilati metallici e simili |
| CN106001321A (zh) * | 2015-03-30 | 2016-10-12 | 矢崎总业株式会社 | 线材矫正装置 |
| CN109175149A (zh) * | 2018-08-09 | 2019-01-11 | 广东新宝精密制造股份有限公司 | 一种钢丝矫直装置 |
| CN113184626A (zh) * | 2021-05-07 | 2021-07-30 | 江苏艾可森钢绳有限公司 | 一种有矫直刮油功能的改性高密度聚乙烯涂塑钢丝绳绕线装置 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101979177B (zh) * | 2010-11-17 | 2012-05-30 | 建科机械(天津)股份有限公司 | 数控钢筋笼成型机的箍筋矫直可调装置 |
| DE102010054111B4 (de) | 2010-12-10 | 2013-06-13 | Wafios Ag | Richtwerk zum rotierenden Richten von Draht |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3857266A (en) * | 1973-08-24 | 1974-12-31 | Handy & Harman Specialty Metal | Rotary arbor wire straightener |
| DE2707970A1 (de) * | 1975-05-30 | 1978-08-31 | Hans Louis | Vorrichtung zum richten von draht |
| JPS63203215A (ja) * | 1987-02-18 | 1988-08-23 | Kawazoe Kikai Seisakusho:Kk | 2ロ−ル式丸棒矯正機における遠隔式ロ−ル角度調整装置 |
| EP0287494A2 (de) * | 1987-04-14 | 1988-10-19 | Panaghiotis A. Anagnostopoulos | Drahtbearbeitungsmaschine |
| EP0620058A1 (de) * | 1993-04-08 | 1994-10-19 | PEDDINGHAUS, Rolf | Richtmaschine für Draht |
-
1996
- 1996-04-12 AT AT0067296A patent/AT408421B/de not_active IP Right Cessation
-
1997
- 1997-04-09 DE DE59700991T patent/DE59700991D1/de not_active Expired - Lifetime
- 1997-04-09 EP EP97105817A patent/EP0800876B1/de not_active Expired - Lifetime
- 1997-04-09 AT AT97105817T patent/ATE188634T1/de active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3857266A (en) * | 1973-08-24 | 1974-12-31 | Handy & Harman Specialty Metal | Rotary arbor wire straightener |
| DE2707970A1 (de) * | 1975-05-30 | 1978-08-31 | Hans Louis | Vorrichtung zum richten von draht |
| JPS63203215A (ja) * | 1987-02-18 | 1988-08-23 | Kawazoe Kikai Seisakusho:Kk | 2ロ−ル式丸棒矯正機における遠隔式ロ−ル角度調整装置 |
| EP0287494A2 (de) * | 1987-04-14 | 1988-10-19 | Panaghiotis A. Anagnostopoulos | Drahtbearbeitungsmaschine |
| EP0620058A1 (de) * | 1993-04-08 | 1994-10-19 | PEDDINGHAUS, Rolf | Richtmaschine für Draht |
Non-Patent Citations (1)
| Title |
|---|
| PATENT ABSTRACTS OF JAPAN vol. 012, no. 484 (M-776), 16.Dezember 1988 & JP 63 203215 A (KAWAZOE KIKAI SEISAKUSHO:KK), 23.August 1988, * |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP0967030A3 (de) * | 1998-06-26 | 2001-04-04 | WITELS APPARATE-MASCHINEN ALBERT GmbH & Co. KG | Verfahren und Vorrichtung zum Einstellen von verstellbaren Rollen eines Richtapparates |
| ITBO20080633A1 (it) * | 2008-10-15 | 2010-04-16 | Schnell Spa | Apparecchiatura per raddrizzare profilati metallici e simili |
| WO2010044009A1 (en) * | 2008-10-15 | 2010-04-22 | Schnell S.P.A. | Apparatus for straightening metal profiles and the like and method for adjusting straightening members in such an apparatus |
| CN106001321A (zh) * | 2015-03-30 | 2016-10-12 | 矢崎总业株式会社 | 线材矫正装置 |
| CN109175149A (zh) * | 2018-08-09 | 2019-01-11 | 广东新宝精密制造股份有限公司 | 一种钢丝矫直装置 |
| CN113184626A (zh) * | 2021-05-07 | 2021-07-30 | 江苏艾可森钢绳有限公司 | 一种有矫直刮油功能的改性高密度聚乙烯涂塑钢丝绳绕线装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE59700991D1 (de) | 2000-02-17 |
| EP0800876B1 (de) | 2000-01-12 |
| ATA67296A (de) | 2001-04-15 |
| ATE188634T1 (de) | 2000-01-15 |
| EP0800876A3 (de) | 1998-05-20 |
| AT408421B (de) | 2001-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0501196A1 (de) | Vollautomitische Verzahnmaschine zum Herstellen von bogenverzahnten Zahnrädern und Verfahren zum Betreiben der Verzahnmaschine | |
| DE3828181A1 (de) | Messvorrichtung, insbesondere zur messung der durchmesser von walzen bei walzenschleifmaschinen | |
| DE4323009C2 (de) | Vorrichtung zum Erzeugen der Steigung einer Feder in einer Federwindeinrichtung | |
| EP0620058B1 (de) | Richtmaschine für Draht | |
| AT408421B (de) | Richtmaschine | |
| DE3915784C1 (de) | ||
| EP0278037A1 (de) | Maschine zum Wuchtzentrieren von Umlaufkörpern | |
| DE3447595C2 (de) | ||
| DE3603561C1 (de) | Einrichtung zum automatischen Verstellen einer Stangenfuehrung an einer numerisch gesteuerten Drehmaschine | |
| DE3235820A1 (de) | Vorrichtung zur befestigung eines zubehoerteils am werkstueckspindelstock einer werkzeugmaschine | |
| DE2803645C2 (de) | Kurbelwellenfräsmaschine | |
| DE2801107B2 (de) | Verfahren und Vorrichtung zur Herstellung von zylindrischen Schraubenfedern aus Draht | |
| DE3936200C1 (de) | ||
| EP0344117B1 (de) | Verfahren und Vorrichtung zum Walzen von Nuten in Einsteckenden von Werkzeugen | |
| CH664921A5 (de) | Einrichtung zum abrichten von doppelkegelschleifkoerpern. | |
| CH663923A5 (de) | Abrichteinrichtung fuer bahngesteuertes abrichten von schleifscheibenprofilen. | |
| DE4433999C2 (de) | Bogenführende Trommel für Rotationsdruckmaschinen | |
| WO1990015692A1 (de) | Drehangetriebene spindel | |
| DE3844343C2 (de) | Kraftbetätigtes Backenspannfutter für exzentrisch zu spannende Werkstücke, insbesondere Kurbelwellen | |
| DE2108338B2 (de) | Schneidvorrichtung zum Unterteilen kontinuierlich angelieferter Material-Stränge | |
| DE3524438A1 (de) | Einrichtung zur zylinderfehlerkompensation an einer schleifmaschine | |
| DE2630224A1 (de) | Verfahren zum montieren von streckwerken auf einer streckwerksbank | |
| EP1048374A2 (de) | Federwindeeinrichtung, insbesondere für Federwindemaschinen | |
| DE868686C (de) | Vorschubeinrichtung fuer die Werkzeuge auf Revolverkoepfen selbsttaetiger Drehbaenke | |
| EP1150785B1 (de) | Walzapparat und verfahren zum justieren eines solchen |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Kind code of ref document: A2 Designated state(s): AT BE CH DE DK ES FI FR GR IT LI LU NL PT SE |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Kind code of ref document: A3 Designated state(s): AT BE CH DE DK ES FI FR GR IT LI LU NL PT SE |
|
| 17P | Request for examination filed |
Effective date: 19980609 |
|
| 17Q | First examination report despatched |
Effective date: 19980724 |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAG | Despatch of communication of intention to grant |
Free format text: ORIGINAL CODE: EPIDOS AGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAH | Despatch of communication of intention to grant a patent |
Free format text: ORIGINAL CODE: EPIDOS IGRA |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE DK ES FI FR GR IT LI LU NL PT SE |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 20000112 Ref country code: GR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20000112 Ref country code: FI Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20000112 Ref country code: ES Free format text: THE PATENT HAS BEEN ANNULLED BY A DECISION OF A NATIONAL AUTHORITY Effective date: 20000112 |
|
| REF | Corresponds to: |
Ref document number: 188634 Country of ref document: AT Date of ref document: 20000115 Kind code of ref document: T |
|
| ITF | It: translation for a ep patent filed |
Owner name: BUGNION S.P.A. |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: NV Representative=s name: ISLER & PEDRAZZINI AG Ref country code: CH Ref legal event code: EP |
|
| REF | Corresponds to: |
Ref document number: 59700991 Country of ref document: DE Date of ref document: 20000217 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 20000409 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: PT Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20000412 Ref country code: DK Free format text: LAPSE BECAUSE OF FAILURE TO SUBMIT A TRANSLATION OF THE DESCRIPTION OR TO PAY THE FEE WITHIN THE PRESCRIBED TIME-LIMIT Effective date: 20000412 |
|
| ET | Fr: translation filed | ||
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PUE Owner name: PROGRESS HOLDING AG TRANSFER- PROGRESS MASCHINEN & Ref country code: CH Ref legal event code: PFA Free format text: PROGRESS AG TRANSFER- PROGRESS HOLDING AG |
|
| BECH | Be: change of holder |
Free format text: 20011002 *PROGRESS MASCHINEN & AUTOMATIONEN A.G. |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: TP Ref country code: FR Ref legal event code: CD |
|
| NLS | Nl: assignments of ep-patents |
Owner name: PROGRESS MASCHINEN & AUTOMATION AG |
|
| NLT1 | Nl: modifications of names registered in virtue of documents presented to the patent office pursuant to art. 16 a, paragraph 1 |
Owner name: PROGRESS HOLDING AG |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PCAR Free format text: ISLER & PEDRAZZINI AG;POSTFACH 1772;8027 ZUERICH (CH) |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: PLFP Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 20160415 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 20160429 Year of fee payment: 20 Ref country code: CH Payment date: 20160425 Year of fee payment: 20 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 20160429 Year of fee payment: 20 Ref country code: BE Payment date: 20160413 Year of fee payment: 20 Ref country code: FR Payment date: 20160405 Year of fee payment: 20 Ref country code: IT Payment date: 20160420 Year of fee payment: 20 |
|
| REG | Reference to a national code |
Ref country code: DE Ref legal event code: R071 Ref document number: 59700991 Country of ref document: DE |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: NL Ref legal event code: MK Effective date: 20170408 |
|
| REG | Reference to a national code |
Ref country code: AT Ref legal event code: MK07 Ref document number: 188634 Country of ref document: AT Kind code of ref document: T Effective date: 20170409 |