EP0135452B1 - Elévateur comportant au moins un mât télescopique - Google Patents
Elévateur comportant au moins un mât télescopique Download PDFInfo
- Publication number
- EP0135452B1 EP0135452B1 EP84420123A EP84420123A EP0135452B1 EP 0135452 B1 EP0135452 B1 EP 0135452B1 EP 84420123 A EP84420123 A EP 84420123A EP 84420123 A EP84420123 A EP 84420123A EP 0135452 B1 EP0135452 B1 EP 0135452B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- pillar
- platform
- chassis
- distinguishing feature
- elevator according
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired
Links
- 230000005484 gravity Effects 0.000 claims description 2
- 238000003780 insertion Methods 0.000 claims 2
- 230000037431 insertion Effects 0.000 claims 2
- 230000004048 modification Effects 0.000 claims 1
- 238000012986 modification Methods 0.000 claims 1
- 230000003019 stabilising effect Effects 0.000 claims 1
- 238000006073 displacement reaction Methods 0.000 description 3
- 238000012423 maintenance Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 125000006850 spacer group Chemical group 0.000 description 3
- 238000004804 winding Methods 0.000 description 3
- 238000003825 pressing Methods 0.000 description 2
- 230000000284 resting effect Effects 0.000 description 2
- 238000010276 construction Methods 0.000 description 1
- 229910003460 diamond Inorganic materials 0.000 description 1
- 239000010432 diamond Substances 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000009423 ventilation Methods 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66F—HOISTING, LIFTING, HAULING OR PUSHING, NOT OTHERWISE PROVIDED FOR, e.g. DEVICES WHICH APPLY A LIFTING OR PUSHING FORCE DIRECTLY TO THE SURFACE OF A LOAD
- B66F11/00—Lifting devices specially adapted for particular uses not otherwise provided for
- B66F11/04—Lifting devices specially adapted for particular uses not otherwise provided for for movable platforms or cabins, e.g. on vehicles, permitting workmen to place themselves in any desired position for carrying out required operations
Definitions
- the present invention relates to an elevator comprising at least one telescopic mast.
- elevators comprising a platform or a nacelle making it possible to have one or more operators work at a certain height above the ground, for example for the maintenance or repair of building facades, high-rise lampposts, maintenance of hangars, etc.
- a first type of elevator concerns hydraulic elevators comprising a gondola that can accept one or two people.
- the elevation is obtained by the movement of mechanically welded arms hinged together and generally controlled by hydraulic cylinders. Besides the fact that they are very expensive, these devices are bulky when folded to the ground.
- Another type of elevator comprises a working platform animated by a vertical elevation movement obtained by the action of one or more hydraulic cylinders acting on a device of arms articulated together according to the technique known as "of chisel".
- These devices are heavy and expensive, and have, from a functional point of view, the disadvantage of a significant limitation in height.
- a third type of elevator comprises a nacelle or working platform fixed to the end of a telescopic central mast, the vertical elevation movement being obtained by deployment of this mast using hydraulic or mechanical means.
- elevators comprising two telescopic masts disposed at two ends of the working platform, the vertical movement of the platform being obtained by simultaneous deployment or telescoping of the two masts from a single manual or electric winch.
- the present invention aims to remedy these drawbacks.
- the elevator that it relates to of the type comprising at least one telescopic mast articulated on a substantially horizontal frame near one of its ends around a horizontal axis (FR-E 2 294 980), the axis of articulation of the mast on the chassis is located in a horizontal plane above the upper plane of the chassis, to allow the housing of the platform between the chassis and the mast, when the latter is folded the horizontal, the platform remaining associated with each mast when the latter is horizontal.
- This elevator has the advantage of being reduced in size and of constituting a complete device not requiring the addition of additional parts for the passage from the folded position to the unfolded position.
- the fact that in the folded position the masts are above the chassis allows, in addition to the housing of the platform, the housing of other members such as the motor for actuating the masts and the platform. form.
- This elevator is equipped with means allowing, at first, the pivoting of each mast from its horizontal position to the vertical position, then the deployment of the masts and the displacement of the platform along them.
- the automation of the means of actuation of the masts and of the platform allows a single operator to set up and deploy the elevator at the workplace without other operations than controlling the motorization of the masts and the platform.
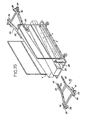
- this breeder comprises several masts, associated with two opposite ends of the platform, the different masts are offset with respect to each other so as to pivot in parallel planes sufficiently distant from each other, so that the different masts can be juxtaposed in the same horizontal plane in the folded position.
- each mast is constituted by several telescopic tubular profiles fitted into one another, of which that of larger section comprises, on its face facing the middle of the apparatus, two profiles longitudinal forming guide rails for a carriage of the platform and of which that of smaller section, of length greater than that of the other profiles, is equipped, in its projecting portion thereof in the nested position of the different profiles, of two rails arranged in the extension of the previous ones, the means for driving the platform and for sliding the elements of each mast being such that, starting from the low position of the platform form, it is moved upwards until each carriage is engaged in the rails of the sections of smaller section, before the start of the sliding towards the outside of the different sections constituting the masts.
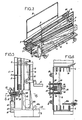
- the elevator shown in Figures 1 to 10, comprises a horizontal frame (2) formed by a frame mounted on casters (3).
- this chassis could be placed on the platform of a vehicle, on a trailer, or be self-propelled depending on the desired use.
- This chassis carries, at each of its ends, two series of supports (4) offset laterally with respect to each other, each series of supports (4) carrying, at its upper end, an axis (5) serving to the articulation of a mast (6).
- the axes of articulation (5) of the masts (6) are parallel and arranged in a horizontal plane situated above the chassis (2).
- each mast is arranged so that when it is in the vertical position, the vertical line passing through its center of gravity is located between the axis of articulation and the center of the 'apparatus, thus facilitating the tilting of the masts towards the horizontal position.
- Each mast (6) comprises three telescopic parts, each of which consists of two spacer elements.
- Each element (7) has a double U shape, a groove (8) for housing and fixing spacers (9) ensuring its connection with the other element (7), and a groove (10) for guiding an element (7) of immediately lower section, or rollers (12) for the element of smaller section.
- the rollers (12) belong to a carriage (13) associated with each mast.
- this carriage includes four braced rollers.
- One of the carriage spacers (13) has two vertical and parallel yokes (14) used for articulation about an axis parallel to the articulation axes (5) masts, a frame (15) carrying the platform (16). As shown in the drawing, this is fitted, in a known manner, with a railing (17), in the areas which are not located opposite the masts.
- each mast (6) is equipped with a system ensuring its locking in the vertical position.
- This system comprises two douboards (18) integral with the chassis (2) forming strikes into which penetrate two bolts constituted by two rods (19) slidably mounted longitudinally to the mast in sleeves (20) and each subjected to the action of a spring (22) tending to cause the rod (19) to protrude from the lower end of the mast.
- each bolt (19) enters a keeper (18) at the end of the pivoting movement.
- This locking can only be released manually, for example using a stop (23) holding the bolts in the extended position, as shown in FIG. 7, requiring the operator to descend from the platform to unlock manually the two masts. This avoids that, as a result of a false maneuver, the operator causes the folding of the masts, while he is still on the platform.
- Each mast is also equipped with a locking system for the various parts constituting it, when they are in the retracted position one inside the other.
- This system comprises a plate (24) integral with the second part of telescopic elements, comprising a central orifice (25) into which is intended to penetrate a rod (26) integral with the external part of the mast.
- This rod (26) is integral with a plate (27) connected by two columns (28), parallel to the rod (26), to another plate (29) located on the other side of the plate (24) by relative to the rod (26).
- Such an arrangement is advantageous because allowing the drive system, the operation of which is described below, to act only for the pivoting of the mast, as long as the latter is not in the vertical position.
- the elevator drive means are constituted by an electric motor (33) located at the lower part of the chassis, comprising an output shaft on which two drums (34) are wedged on which two cables (35) are wound, according to reverse windings, each cable being associated with a mast.
- Each cable (35) first passes over a pulley (36a) secured to the chassis.
- the axis of this pulley like the axis of all the other pulleys described below, is parallel to the pivot axis of the mast in question.
- the cable (35) then passes over two pulleys (36b) and (37) mounted respectively at the lower and upper ends of the part of the largest section of the mast.
- the free end of the cable (35) is fixed at (38) to the lower end of the second part of the mast.
- a second cable (39) passing over a pulley (40) disposed at the upper end of the second part of the mast is fixed by its ends, respectively, at (42) at the high end of the part of larger section of the mast and in (43) in the lower part of the third part of the mast.
- a cable (44) passing over a pulley (45) in the upper part of the mast is fixed at its ends, at (46) at the upper end of the second part of the mast and at (47) on the platform. form.
- the operator can then take place on the platform and control the continuation of the winding of the cables (35) on the drums (34). This operation is reflected by the cable circuit described above by the deployment of the telescopic parts of the two masts and the movement up the platform in the elements of the third telescopic part to reach the position shown in the figure 1.
- each rod (26) engages in the plate (24), releasing the corresponding stop (23) and allowing the bolts (19) to exit under the action of the springs (22).
- the mast (50), shown in FIG. 11, is made from three tubular profiles capable of fitting into each other, respectively a profile (52) of large section, a profile (53) of intermediate section, and a profile (54) of small section.
- a profile (52) of large section On the face of the profile (52) turned towards the middle side of the device, are fixed two U-shaped profiles (55) forming guide rails for a carriage.
- the section (54) of smaller section is of greater length than that of the sections (52) and (53) so as to protrude therefrom when the three mast elements are in the nested position.
- On the part of the profile (54) projecting from the other two profiles are fixed two rails (56) arranged in the extension of the rails (55). The length of the rails (56) is sufficient to receive a support carriage for the platform (16).
- the tilting movement of each mast and relative movement of the different elements of it is obtained from an electric motor (57) integral with the chassis, the output shaft of which drives as many drums (58) as the elevator has masts.
- On the drum (58) is wound a cable (59) passing successively on pulleys (60) and (62) arranged in the lower part and in the upper part of the element (52), (63 and 64) arranged in the lower part and in the upper part of the element (53) and (65 and 66) disposed, respectively, in the lower part and in the upper part of the element (54), the free end of the cable being fixed at (67) on the platform (16) or the drive means thereof.
- the carriage (13) having the structure described above is mounted on a plate (68) with the possibility of a slight axial displacement.
- This plate (68) has a hole (69) near its upper end for hanging the cable (59) and a hole (70) near its lower end for engaging a locking finger (72 ).
- the finger (72) fulfills a function similar to that of the finger (26) described above and the means used identical to those which have been described bear the same reference.
- the finger (72) is released from the hole (70).
- the finger (72) locks the plate (68), the carriage (13) being capable of sliding slightly along the plate (68), as shown in FIG. 15, to take into account the distance between the respective articulation axes of the mast on the chassis and the platform on the carriage.
- FIGs 16 and 17 show an alternative embodiment of the device shown in Figures 13 to 15.
- the carriage is rigidly mounted on a plate (68a) allowing a locking relative to the mast and the hanging of the cable (59).
- the mounting of the platform (16) on the carriage is carried out by means of a rod (73) engaged in open rings (74) integral with the carriage (13), and closed by the intermediate locks (75) when the masts are in vertical position.
- the latches (75) are actuated in the open position by pressing which they take on fingers (76) integral with the chassis.
- the platform (16) can thus escape the rings (74) and is disconnected from the carriages (1 3) resting directly on the chassis, as shown in Figure 17.
- the rods (73) of the platform (16) automatically lock into the rings (74).
- FIGS 18 and 19 show another alternative embodiment in which the platform (16) is rigidly mounted on a carriage (76).
- carriage guide means (76) are constituted not only by the rails (55 and 56) of the masts, but also by rails (77) integral with the chassis which, in the vertical position of the masts, extend the integral rails. of these.
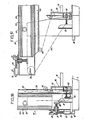
- FIGS 20 to 23 of the drawing show an elevator equipped with a base for raising the chassis.
- elevators of this type are often used for maintenance and repair work in factories, warehouses or department stores to carry out work at height on ventilation and heating ducts, electric cables, devices lifting, etc ....
- the premises being most often congested with machines or other fixed elements, it is not possible to position anywhere at ground level, the chassis of an elevator.
- the elevator according to the invention can be equipped with an elevation base comprising two pairs of crutches (82), each of which has, on the one hand, means of attachment to a mast (6) and, on the other hand, fixing means on the chassis (2).
- each stand (83) has, in its upper part, two series of holes (84, 85) intended to cooperate with a series of holes (86, 87) formed, respectively, in a mast (6) or in the frame (2) for attachment to one or the other of these two elements.
- each stand (83) is equipped, at its lower end, on the one hand, with a wheel (88) and, on the other hand, a support pad (89) mounted at the end of a screw jack (90) with a longitudinal axis to the stand.
- the two pairs of crutches (82) are fixed on the two masts (6) when these are in a horizontal position, with location of the holes (84, 86) according to the desired heightening of the chassis (2). Then, as shown in FIG. 21, the masts (6) are tilted, movement during which the wheels (88) are supported on the ground.
- the elevator is then positioned at the place of use, for example above a machine (92) after which, by using the jacks (90), it is placed in stable support on the pads (89), as shown in figure 22.
- FIGS. 24 to 28 represent a single mast elevator, comprising, like the elevator described above, a frame (2) near one end of which is arranged a pair of supports (4) at the upper part of which is articulated around a horizontal axis (5), the mast (93).
- the mast is formed not by open sections, but by a lower section (94) of larger tubular section, the following elements (95, 96) being tubular sections of which the one (95) is slidably mounted in that (94) and of which that (96) is slidably mounted in that (95).
- the internal profile (96) is equipped, at its upper end, with a tubular part (97) of the same section as the element (94), and coming to extend the latter when the different elements of the mast are fitted one in others.
- This elevator is equipped with a nacelle (98), the guidance of which on the mast (93) is achieved by means of a belt (99) bearing on the periphery of the mast by means of rollers (100) .
- the nacelle is firstly moved along the element (94), then along the extension (97) of the profile interior (96); it is only afterwards that the sections (94, 95, 96) are removed from each other to continue the elevation of the nacelle.
- the operations are carried out in reverse order.
- This solution makes it possible to have a peripheral guide path on the mast, of constant section, while benefiting from the advantages of the telescopic elements.
- Each basket presents, in side view. a deformable parallelogram-like structure.
- the edge (102) of the floor of the nacelle bears against the frame (2) of the elevator, which results in the pursuit of the movement by the deformation of the parallelogram which takes the form of a flattened diamond.
- the diagonal (102, 103) ensures the holding of the nacelle, in the position of use thereof.
- FIG 28 shows the mast locking means.
- a part (104) inside which slides longitudinally to the mast a spindle (105) whose lower end forms a cylindrical bolt (106) intended to come to engage in a part (107) integral of the striker frame.
- This device also comprises a spindle (108) sliding transversely to the mast, intended to penetrate into a plate (109) secured to the carriage carrying the nacelle.
- the spindle (108) can only pass through an enlarged part (110) of an opening formed in the spindle (105) only when the latter is in the low position.
- Springs (112, 113) are associated with pins (105) and (108) respectively, which tend to move the latter towards their unlocked position.
Landscapes
- Engineering & Computer Science (AREA)
- Structural Engineering (AREA)
- Life Sciences & Earth Sciences (AREA)
- Geology (AREA)
- Mechanical Engineering (AREA)
- Types And Forms Of Lifts (AREA)
- Maintenance And Inspection Apparatuses For Elevators (AREA)
- Cage And Drive Apparatuses For Elevators (AREA)
- Carpets (AREA)
- Forklifts And Lifting Vehicles (AREA)
- Lift-Guide Devices, And Elevator Ropes And Cables (AREA)
Description
- La présente invention concerne un élévateur comportant au moins un mât télescopique.
- Il existe à ce jour plusieurs types d'élévateurs comportant une plate-forme ou une nacelle permettant de faire travailler un ou des opérateurs à une certaine hauteur par rapport au sol, par exemple pour l'entretien ou la réfection de façades de bâtiments, de lampadaires de grande hauteur, l'entretien de charpentes de hangars, etc...
- Un premier type d'élévateur concerne les élévateurs hydrauliques comportant une nacelle pouvant accepter une ou deux personnes. L'élévation est obtenue par le mouvement de bras mécano-soudés articulés entre eux et commandés généralement par des vérins hydrauliques. Outre le fait qu'ils sont très coûteux, ces appareils sont encombrants lorsqu'ils sont repliés au sol.
- Un autre type d'élévateur comprend une plate- forme de travail animée d'un mouvement d'élévation verticale obtenue par l'action d'un ou de plusieurs vérins hydrauliques agissant sur un dispositif de bras articulés entre eux suivant la technique dite "du ciseau". Ces appareils sont lourds et coûteux, et présentent, d'un point de vue fonctionnel, l'inconvénient d'une limitation importante en hauteur.
- Un troisième type d'elevateur comprend une nacelle ou plateforme de travail fixée a l'extrémite d'un mât central télescopique, le mouvement d'élévation verticale étant obtenu par déploiement de ce mât à l'aide de moyens hydrauliques ou mécaniques.
- Outre le fait qu'ils sont très coûteux, ces appareils sont encombrants et très lourds.
- Il existe également des élévateurs à un seul mât télescopique dans lesquels le mât replie occupe une position verticale très encombrante au-dessus du châssis.
- Il existe enfin des élévateurs comportant deux mâts télescopiques disposés à deux extrémités de la plate-forme de travail, le mouvement vertical de la plate-forme étant obtenu par déploiement ou télescopage simultane des deux mâts à partir d'un seul treuil manuel ou électrique.
- Néanmoins, la mise en oeuvre de l'elevateur avant l'operation de telescopage est longue et délicate.
- Elle consiste à faire pivoter manuellement de la position horizontale ou proche de l'horizontale a la position verticale les deux mâts. Après avoir été verrouillés manuellement dans cette position, les deux mats verticaux sont équipés de la plate- forme de travail. Ceci constitue une opération longue et pouvant présenter certains risques pour l'opérateur.
- En position repliée, les deux mâts horizontaux sont superposés, ce qui constitue une solution encombrante, et necessite une construction dissymétrique du châssis principalement au niveau de l'articulation des mâts.
- La présente invention vise à remédier a ces inconvenients.
- A cet effet, dans l'élévateur qu'elle concerne du type comprenant au moins un mât télescopique articulé sur un châssis sensiblement horizontal à proximité de l'une de ses extrémités autour d'un axe horizontal (FR-E 2 294 980), l'axe d'articulation du mât sur le châssis est situé dans un plan horizontal au-dessus du plan supérieur du châssis, afin de permettre le logement de la plate- forme entre le châssis et le mât, lorsque celui-ci est replié à l'horizontale, la plate-forme demeurant associée à chaque mât lorsque celui-ci est à l'horizontale.
- Cet élévateur présente l'avantage d'être d'un encombrement réduit et de constituer un appareil complet ne nécessitant pas le rajout de pièces supplémentaires pour le passage de la position pliée à la position dépliée. En outre, le fait qu'en position pliée les mâts se trouvent au-dessus du châssis permet, outre le logement de la plate- forme, le logement d'autres organes tels que le moteur d'actionnement des mâts et de la plate- forme.
- Cet élévateur est équipé de moyens permettant, dans un premier temps, le pivotement de chaque mât depuis sa position horizontale jusqu'en position verticale, puis le déploiement des mâts et le deplacement de la plate-forme le long de ceux-ci.
- L'automatisation des moyens d'actionnement des mâts et de la plate-forme permet a un seul operateur la mise en place et le déploiement de l'élévateur sur le lieu de travail sans autres opérations que la commande de la motorisation des mâts et de la plate-forme.
- Dans la mesure où cet élevateur comporte plusieurs mâts, associés a deux extremités opposées de la plate-forme, les différents mâts sont décalés les uns par rapport aux autres de manière à pivoter dans des plans parallèles suffisamment éloignés les uns des autres, pour que les différents mâts puissent être juxtaposés dans un même plan horizontal en position repliée.
- Cette solution est très intéressante car assurant une grande compacité de l'appareil en position pliée, tout en simplifiant sa réalisation par standardisation des pièces utilisées pour les differents mâts, puisque ceux-ci sont articulés à la même distance du châssis.
- Conformément à une autre forme d'exécution de cet élévateur, chaque mât est constitué par plusieurs profiles tubulaires télescopiques emboités les uns dans les autres, dont celui de plus grande section comprend, sur sa face tournée vers le milieu de l'appareil, deux profilés longitudinaux formant rails de guidage pour un chariot de la plate-forme et dont celui de plus petite section, de longueur supérieure à celle des autres profilés, est équipé, dans sa partie débordant de ceux-ci en position emboitée des différents profilés, de deux rails disposés dans le prolongement des précédents, les moyens d'entraînement de la plate-forme et de coulissement des éléments de chaque mât étant tels que, partant de la position basse de la plate- forme, celle-ci soit déplacée vers le haut jusqu'à ce que chaque chariot soit engagé dans les rails des profilés de plus petite section, avant le debut du coulissement vers l'extérieur des différents profilés constitutifs des mâts.
- Cette solution est intéressante, d'un point de vue de la réalisation, car permettant d'utiliser des éléments simples tels que des profilés tubulaires, tout en permettant de réaliser des mâts possédant une excellente rigidité. En outre, d'un point de vue pratique, il est avantageux que la plate-forme se trouve toujours en position haute des mâts car permettant à l'operateur de se trouver le plus près possible de la zone où une intervention doit être effectuée.
- De toute façon, l'invention sera bien comprise à l'aide de la description qui suit en reférence au dessin schématique annexé representant, à titre d'exemples non limitatifs, plusieurs formes d'execution de cet élévateur:.
- Figure 1 est une vue en perspective d'un premier élevateur à deux mâts, les mâts étant déployés et la plate-forme étant en position haute;
- Figure 2 en est une vue en perspective, les mâts étant basculés en position verticale et la plate-forme étant en position basse;
- Figure 3 en est une vue en perspective, les mâts étant en position repliée;
- Figure 4 est une vue en perspective d'une extrémité de la plate-forme et du chariot sur lequel elle est montée,;
- Figure 5 est une vue en coupe verticale et à échelle agrandie selon la ligne 5-5 de figure 2 de la partie inférieure d'un mât,;
- Figure 6 est une vue en coupe horizontale de la partie inférieure d'un mât selon la ligne 6-6 de figure 5;
- Figure 7 est une vue similaire à celle de figure 5 en position déverrouillée du mât,;
- Figure 8 est une vue de la partie inférieure d'un mât en position horizontale;
- Figure 9 est une vue très schématique du système d'entraînement des différents éléments de mâts;
- Figure 10 est une vue en coupe transversale passant par les extrémités superieures des différents élements d'un mât;
- Figure 11 est une vue en perspective d'une variante d'exécution d'un mât réalisé à partir de profilés tubulaires;
- Figure 12 est une vue très schématique du système d'entraînement des éléments du mât de figure 11;
- Figure 13 est une vue en perspective d'un premier chariot destiné à être guidé dans le mât de figure 11;
- Figures 14 et 15 sont deux vues partielles en coupe longitudinale. d'un mât equipé du chariot de figure 13, respectivement en position verticale et en position horizontale;
- Figures 16 et 17 sont deux vues partielles en coupe longitudinale d'un mât équipé d'un chariot constituant une variante d'exécution de celui de figure 13, respectivement en position verticale et en position horizontale;
- Figures 18 et 19 sont deux vues partielles, en coupe longitudinale, d'un mât equipe d'un chariot constituant une autre variante de celui de figure 13, respectivement en position verticale et en position horizontale;
- Figure 20 est une vue schématique en perspective d'un élévateur a deux mâts équipés d'une embase de surélévation du châssis;
- Figure 21 est une vue de côte de l'élévateur de figure 20 au cours du mouvement de pivotement des mâts de la position horizontale à la position verticale;
- Figure 22 est une vue de cêté de l'élévateur de figure 20, les mâts étant en position verticale;
- Figure 23 est une vue de côte de l'élévateur de figure 20, le châssis reposant sur l'embase de surélévation, et les mâts étant repliés en position horizontale, ;
- Figure 24 est une vue de côté d'un élévateur a un mât, celui-ci étant en position verticale;
- Figure 25 est une vue en coupe transversale de cet élévateur suivant la ligne 25-25 de figure 24;
- Figure 26 est une vue de cêté de cet élévateur, le mât étant déployé;
- Figure 27 est une vue de cêté de cet élévateur, le mât etant replié en position horizontale;
- Figure 28 est une vue en perspective et à échelle agrandie des moyens de verrouillage du mât.
- L'élévateur, représenté aux figures 1 à 10, comprend un châssis horizontal (2) formé par un cadre monté sur des roulettes (3). Cependant, il faut noter que ce châssis pourrait être disposé sur le plateau d'un véhicule, sur une remorque, ou être automoteur en fonction de l'utilisation recherchée.
- Ce châssis porte, à chacune de ses extremites, deux séries de supports (4) décalées latéralement l'une par rapport a l'autre, chaque série de supports (4) portant, a son extrémité supérieure, un axe (5) servant à l'articulation d'un mât (6). Les axes d'articulation (5) des mâts (6) sont parallèles et disposés dans un plan horizontal situé au-dessus du châssis (2).
- L'axe d'articulation (5) de chaque mât est disposé de telle sorte que quand celui-ci est en position verticale, la ligne verticale passant par son centre de gravité est située entre l'axe d'articulation et le centre de l'appareil, facilitant ainsi le basculement des mâts vers la position horizontale.
- Chaque mât (6) comprend trois parties télescopiques dont chacune est constituée par deux éléments entretoises. Chaque élément (7) possède une forme de double U dont une gorge (8) sert au logement et à la fixation d'entretoises (9) assurant sa liaison avec l'autre élément (7), et une gorge (10) servant au guidage d'un élément (7) de section immédiatement inférieure, ou de galets (12) pour l'élement de plus petite section.
- Les galets (12) appartiennent à un chariot (13) associé à chaque mât. A cet effet, ce chariot comprend quatre galets entretoisés. L'une des entretoises du chariot (13) comporte deux chapes verticales et parallèles (14) servant à l'articulation autour d'un axe parallèle aux axes d'articulation (5) des mâts, d'un cadre (15) portant la plate- forme (16). Comme montré au dessin, celie-ci est équipée, de façon connue, d'un garde-corps (17), dans les zones qui ne sont pas situées en regard des mâts.
- Ce mode de montage de la plate-forme et d'articulation des mâts permet, lors du repliage à l'horizontale de ceux-ci, de loger la plate-forme (16) sous eux, comme montré à la figure 3, ce qui conduit à une réalisation très compacte.
- Comme montré au dessin, chaque mât (6) est équipé d'un système assurant son verrouillage en position verticale. Ce système comprend deux douiiles (18) solidaires du châssis (2) formant des gâches dans lesquelles pénètrent deux pênes constitués par deux tiges (19) montées coulissantes longitudinalement au mât dans des manchons (20) et soumises chacune à l'action d'un ressort (22) tendant a faire dépasser la tige (19) de l'extrémite inférieure du mât. Lors du passage du mât de la position horizontale à ia position verticale, chaque pêne (19) pénètre dans une gâche (18) en fin de mouvement de pivotement. Ce verrouillage ne peut être liberé que manuellement, par exemple à l'aide d'une butée (23) maintenant les pênes en position sortie, comme montré à la figure 7, imposant à l'opérateur de descendre de la plate-forme pour déverrouiller manuellement les deux mâts. Ceci évite que, par suite d'une fausse manoeuvre, l'operateur provoque le repliage des mâts, alors qu'il est encore sur la plate-forme.
- Chaque mât est, en outre, équipé d'un système de verrouillage des différentes parties le constituant, lorsqu'elles sont en position rentrée les unes dans les autres. Ce système comprend une plaque (24) solidaire de la deuxième partie d'éléments télescopiques, comportant un orifice central (25) dans lequel est destinée a pénétrer une tige (26) solidaire de la partie extérieure du mât. Cette tige (26) est solidaire d'une plaque (27) reliée par deux colonnes (28), parallèles à la tige (26), à une autre plaque (29) située de l'autre côte de la plaque (24) par rapport à la tige (26).
- Des ressorts (30) maintiennent normalement la tige (26) en position poussée vers la plaque de verrouillage (24). Une butée (32), associée a chaque mât, est montée sur le châssis (2), contre laquelle vient prendre appui la plaque (29), Jorsque le mât arrive en position verticale. L'action exercée sur la plaque (29), transmise par les colonnes (28), provoque le retrait de la tige (26) hors de l'orifice (25) de la plaque (24).
- Les différentes parties du mât peuvent alors coulisser librement. En période de pliage de l'élévateur, ce verrouillage se produit dès le début du pivotement de chaque mât, au moment où la plaque (29) échappe à la butée (32).
- Une telle disposition est intéressante car permettant au système d'entraînement dont le fonctionnement est décrit ci-après, de n'agir que pour le pivotement du mât, tant que celui-ci n'est pas en position verticale.
- Les moyens d'entraînement de l'élévateur sont constitués par un moteur électrique (33) situé à la partie inférieure du châssis, comportant un arbre de sortie sur lequel sont calés deux tambours (34) sur lesquels sont enroulés deux câbles (35), selon des enroulements inverses, chaque câble étant associé à un mât.
- Chaque câble (35) passe tout d'abord sur une poulie (36a) solidaire du châssis. L'axe de cette poulie, de même que l'axe de toutes les autres poulies décrites ci-apres, est parallèle à l'axe de pivotement du mât considéré. Le câble (35) passe ensuite sur deux poulies (36b) et (37) montées respectivement aux extrémités inférieure et supérieure de la partie de plus grande section du mât. L'extrémité libre du câble (35) est fixée en (38) à l'extrémité inférieure de la deuxième partie du mât. Un second câble (39) passant sur une poulie (40) disposée à l'extrémité supérieure de la seconde partie du mât est fixée par ses extrémités, respectivement, en (42) à l'extrémité haute de la partie de plus grande section du mât et en (43) en partie basse de la troisième partie du mât. Enfin, un câble (44) passant sur une poulie (45) disppsée en partie haute du mât est fixe par ses extrémités, en (46) à l'extrémité supérieure de la seconde partie du mât et en (47) sur la plate- forme.
- D'un point de vue pratique, le fonctionnement de cet élévateur depuis sa position pliée représentée a la figure 3 est le suivant:
- L'actionnement du moteur (33) provoquant un enroulement des câbles (35) sur les tambours (34) se traduit, comme montré à la figure 8, par un couple de basculement sur les deux mâts (6) provoquant le passage de ceux-ci de la position horizontale à la position verticale. Au cours de ce mouvement, les différentes parties des deux mâts ne peuvént pas se déployer, étant maintenues verrouillées les unes relativement aux autres, grâce au vérrou (26) - (30). Lorsque les mâts arrivent en position verticale, l'appui sur les butées (32) provoque le déverrouillage les differentes parties des mâts les unes relativement aux autres permettant ainsi leur déploiement. En outre, lorsque les mâts arrivent en position verticale, ils se bloquent dans celle-ci par engagement des pênes (19) dans les gâches (18).
- L'opérateur peut alors prendre place sur la plate-forme et commander la poursuite de l'enroulément des câbles (35) sur les tambours (34). Cétte operation se traduit grâce au circuit de câbles décrit precédemment par le déploiemént des parties télescopiques des deux mâts et le déplacément vers le haut de la plate-forme dans les élements de la troisième partie télescopique pour arrivér jusqu'à la position représentée à la figure 1.
- Pour répliér l'élévateur, il suffit d'actionner le moteur électrique (33) en position inverse. Les différentes parties des deux mâts pénètrent alors les unes dans lés autres et la plate-forme s'abaisse jusqu'à venir dans la position représentée à la figure 2. L'opérateur doit alors quitter la plate-forme pour déverrouiller manuellement les pênes (19) et les maintenir en position déverrouillée à l'aide des butées (23). La poursuite de l'actionnement du moteur (33) permet alors un pivotement des deux mâts par dessus la plate-forme, avec verrouillage automatique des élements télescopiques des deux mâts dès que ceux-ci échappent aux butées (32).
- Dès basculement des mâts, chaque tige (26) vient s'engager dans la plaque (24), libérant la butée correspondante (23) et permettant la sortie des pênes (19) sous l'action des ressorts (22).
- Le mât (50), représenté à la figure 11, est réalisé à partir de trois profilés tubulaires susceptibles d'emboîtément les uns dans les autres, respectivement un profilé (52) de grande section, un profile (53) de section intermédiaire, et un profilé (54) de petite section. Sur la face du profilé (52) tournée du côté du milieu de l'appareil, sont fixés deux profilés én U (55) formant rails de guidage pour un chariot. Le profilé (54) de plus petite section est de longueur supérieure a celle des profilés (52) et (53) de façon à dépasser de ceux-ci lorsque les trois éléments de mât sont en position emboîtée. Sur la partie du profilé (54) débordant des deux autres profilés sont fixes deux rails (56) disposés dans le prolongement des rails (55). La longueur des rails (56) est suffisante pour recevoir un chariot de soutien de la plate-forme (16).
- D'un point de vue pratique, le mouvement de basculement de chaque mât et de déplacement relatif des différents éléments de celui-ci, est obtenu à partir d'un moteur électrique (57) solidaire du châssis, dont l'arbre de sortie entraîne autant de tambours (58) que l'élévateur comporte de mâts. Sur le tambour (58) est enroulé un câble (59) passant successivement sur des poulies (60) et (62) disposées en partie basse et en partie haute de l'élément (52), (63 et 64) disposées en partie basse et en partie haute de l'élément (53) et (65 et 66) disposées, respectivement, en partie basse et en partie haute de l'élement (54), l'extrémité libre du câble étant fixée en (67) sur la plate-forme (16) ou les moyens d'entraînement de celle-ci.
- Dans la forme d'exécution répresentée à la figure 13, le chariot (13) possédant la structure décrite précédemment est monté sur une plaqué (68) avec possibilité d'un léger deplacement axial. Cette plaque (68) présente un trou (69) a proximité de son extrémité supérieure pour l'accrochage du câble (59) et un trou (70) a proximité de son extrémité inférieure pour l'engagement d'un doigt de verrouillage (72).
- En effet, dans un tel cas, il est impératif de réaliser le blocage de la plate-forme en position basse, afin d'éviter le déplacement de celle-ci le long des mâts avant que ces derniers aient atteint la position verticale. Le doigt (72) remplit une fonction similaire a celle du doigt (26) décrit précédemment et les moyens mis en oeuvre identiques à ceux qui ont été décrits portent la même référence.
- Comme montré à la figure 14, lorsque la plate- forme (16) est en position basse, le doigt (72) est dégagé hors du trou (70). Lors du basculement des mâts à l'horizontale, le doigt (72) verrouille la plaque (68), le chariot (13) étant susceptible d'un léger coulissement le long de la plaque (68), comme montré à la figure 15, pour tenir compte de la distance entre les axes d'articulation respectifs du mât sur le châssis et de la plate-forme sur le chariot.
- Les figures 16 et 17 représentent une variante d'exécution du dispositif représenté aux figures 13 à 15. Dans cette variante, où les mêmes éléments sont désignés par les mêmes références queprécédemment, le chariot est monté de façon rigide sur une plaque (68a) permettant un verrouillage par rapport au mât et l'accrochage du câble (59). Dans ces conditions, le montage de la plate-forme (16) sur le chariot est réalisé par l'intermédiaire d'une tige (73) engagée dans des anneaux ouverts (74) solidaires du chariot (13), et fermés par l'intermédiaire de verrous (75) lorsque les mâts sont en position verticale. Lorsque, partant dé la position représentée à la figure 16, chaque mât bascule vers sa position horizontale, les verrous (75) sont actionnés en position ouverte par appui qu'ils prennent sur des doigts (76) solidaires du châssis. La plate-forme (16) peut ainsi échapper aux anneaux (74) et se trouve desolidarisée des chariots (1 3) réposant directemént sur le châssis, comme montre a la figure 17. Lors d'un nouveau passage des mâts (50) en position verticale, les tiges (73) de la plate- forme (16) viennent automatiquement se verrouiller dans les anneaux (74).
- Les figures 18 et 19 representent une autre variante d'exécution dans laquelle la plate-forme (16) est montée de façon rigide sur un chariot (76).
- En outre, les moyens de guidage du chariot (76) sont constitues non seulement par les rails (55 et 56) des mâts, mais éncore par des rails (77) solidaires du châssis qui, en position verticale des mâts, prolongent les rails solidaires de ceux-ci.
- D'un point de vue pratique, lorsque le chariot (76) est en position basse, ses galets de guidage se trouvent exclusivement à l'interieur des rails (77). De ce fait, le chariot (76) ne bascule pas avec le mât auquel il est associé, lors du passage de celui-ci a la position horizontale, comme montré a la figure 19. Dans ce cas, il est prévu un système de verrouillage du chariot par l'intermédiaire d'un doigt (78) solidaire du châssis, possédant le même mode d'actionnement que les doigts de verrouillage décrits précédemment, susceptible d'être escamoté en position verticale du mât par action d'une butée (79) solidaire de ce dernier. Dans ce dernier cas, il est nécessaire de prévoir une poulie supplémentaire (80) pour le guidage du câble (59), dans la zone de jonction entre les rails (55) et (77).
- Les figures 20 à 23 du dessin représentent un élévateur équipé d'une embase de surélévation du châssis. En effet, les élévateurs de ce type sont souvent utilisés pour les travaux d'entretien et de maintenance dans des usines, entrepôts ou grands magasins pour effectuer des travaux en hauteur sur des gaines de ventilation et de chauffage, des câbles électriques, des appareils de levage, etc....Toutefois, les locaux étant le plus souvent encombrés de machines ou autres élements fixes, il n'est pas possible de positionner n'importe où au niveau du sol, le châssis d'un élévateur. Pour remédier à ces inconvénients, l'élévateur selon l'invention peut être équipé d'un e embase de surélévation comprenant deux paires de béquilles (82) dont chacune présente, d'une part, des moyens de fixation sur un mât (6) et, d'autre part, des moyens de fixation sur le châssis (2). A cet effet, chaque béquille (83) présente, dans sa partie supérieure, deux séries de trous (84, 85) destinés à coopérer avec des séries de trous (86, 87) ménagés, respectivement, dans un mât (6) ou dans le châssis (2) en vue de sa fixation sur l'un ou l'autre de ces deux éléments. En outre, chaque béquille (83) est équipée, à son extrémité infériéure, d'une part, d'une roue (88) et, d'autre part, d'un patin d'appui (89) monte en bout d'un vérin à vis (90) d'axe longitudinal à la béquille.
- D'un point de vué pratique, les deux paires de béquilles (82) sont fixées sur les déux mâts (6) lorsque ceux-ci sont en position horizontale, avec repérage des trous (84, 86) en fonction de la surélévation souhaitée du châssis (2). Il est ensuite procédé, comme montré a la figuré 21, au basculement des mâts (6), mouvement au cours duquel les roues (88) sont en appui sur le sol. L'élévateur est alors positionné sur le lieu d'utilisation, par exemple au-dessus d'une machine (92) après quoi, par utilisation des vérins (90), il est mis en appui stable sur les patins (89), comme montré a la figure 22. Si l'apparéil doit être deplacé à l'intérieur du même local, il est possible de fixer par les trous (85, 87) les deux paires de béquilles (82) sur le châssis (2) avant de replier les mâts (6) a l'horizontale, comme décrit précédemment, l'appareil occupant la position représentée à la figure 23.
- Les figures 24 à 28 représentent un élévateur à un mât, comprenant comme l'élévateur decrit précédemment un châssis (2) à proximité d'une extrémité duquel est disposée une paire de supports (4) à la partie supérieure desquels est articulé autour d'un axe horizontal (5), le mât (93). Dans ce cas, le mât est constitué non pas par des profilés ouverts, mais par un profilé inférieur (94) de plus grande section tubulaire, les éléments suivants (95, 96) étant des profilés tubulaires dont celui (95) est monté coulissant dans celui (94) et dont celui (96) est monté coulissant dans celui (95). Le profilé intérieur (96) est équipé, à son extrémité supérieure, d'une partie tubulaire (97) de même section que l'élément (94), et venant prolonger celui-ci lorsque les différents éléments du mât sont emboîtes les uns dans les autres. Cet élévateur est équipé d'une nacelle (98), dont le guidage sur le mât (93) est réalisé par l'intermédiaire d'une ceinture (99) prenant appui sur le pourtour du mât par l'intermédiaire de galets (100). D'un point de vue pratique, lorsque l'appareil est dans la position représentée à la figure 24, la nacelle est tout d'abord déplacée le long de l'élément (94), puis le long du prolongement (97) du profilé interieur (96); c'est seulement après, que les profilés (94, 95, 96) sont débottes les uns des autres pour poursuivre l'élévation de la nacelle. Lors de l'abaissement de la nacelle, les opérations sont réalisées dans l'ordre inverse. Cette solution permet de disposer d'un chemin de guidage périphérique sur le mât, de section constante, tout en bénéficiant des avantages des éléments télescopiques.
- Comme montré à la figure 26, il est possible d'équiper la ceinture de guidage (99) d'une ou de deux nacelles (98).
- Chaque nacelle présente, en vue de côté. une structure en forme de parallélogramme déformable. Lors du basculement du mât (93) de la position verticale à la position horizontale, le bord (102) du plancher de la nacelle vient en appui contre le châssis (2) de l'élévateur, ce qui se traduit lors de la poursuite du mouvement par la déformation du parallélogramme qui prend une forme de losange aplati. La diagonale (102, 103) assure la tenue de la nacelle, en position d'utilisation de celle-ci.
- La figure 28 représente les moyens de verrouillage du mât. Sur le mât est fixé une pièce (104) à l'intérieur de laquelle coulisse longitudinalement au mât une broche (105) dont l'extrémite inférieure forme un pêne cylindrique (106) destiné à venir s'engager dans une pièce (107) solidaire du châssis formant gâche. Ce dispositif comprend également une broche (108) coulissant transversalement au mât, destinée à pénétrer dans une platine (109) solidaire du chariot portant la nacelle. La broche (108) ne peut traverser une partie élargie (110) d'une ouverture ménagée dans la broche (105) que lorsque celle-ci est en position basse. Des ressorts (112, 113) sont associés aux broches (105) et (108) respectivement, qui tendent à déplacer celles-ci vers leur position de déverrouillage.
- D'un point de vue pratique, lorsque le mât arrive en position verticale la broche (105) est déplacée vers le bas a l'encontre de l'action du ressort (112) jusqu'à ce que la partie élargie (110) de l'ouverture arrive en face de la broche (108). Celle-ci déverrouille alors la platine (109) et par engagement dans l'ouverture (110), verrouille la broche (105,106) en position basse. Pour replier l'élévateur, il est procédé de façon inverse.
Claims (26)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| AT84420123T ATE20333T1 (de) | 1983-07-11 | 1984-07-10 | Hubeinrichtung mit wenigstens einem teleskopmast. |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR8311920 | 1983-07-11 | ||
| FR8311920A FR2549029B1 (fr) | 1983-07-11 | 1983-07-11 | Elevateur comportant au moins un mat telescopique |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| EP0135452A1 EP0135452A1 (fr) | 1985-03-27 |
| EP0135452B1 true EP0135452B1 (fr) | 1986-06-11 |
Family
ID=9290931
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP84420123A Expired EP0135452B1 (fr) | 1983-07-11 | 1984-07-10 | Elévateur comportant au moins un mât télescopique |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US4619346A (fr) |
| EP (1) | EP0135452B1 (fr) |
| AT (1) | ATE20333T1 (fr) |
| DE (1) | DE3460220D1 (fr) |
| FR (1) | FR2549029B1 (fr) |
| MA (1) | MA20170A1 (fr) |
| OA (1) | OA07744A (fr) |
Families Citing this family (39)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2219273B (en) * | 1988-05-11 | 1992-02-05 | Mark Richardson | Improvements in powered access platform units |
| US4867277A (en) * | 1988-09-29 | 1989-09-19 | Sloan William C | Portable lifting device and cart |
| US4944366A (en) * | 1989-02-06 | 1990-07-31 | D. L. Pryor & Sons, Inc. | Pneumatically operated scaffolding |
| FR2643057B1 (fr) * | 1989-02-13 | 1991-05-10 | Coche Andre | Chariot ascenseur pour travail mobile en hauteur |
| FR2646686B1 (fr) * | 1989-05-05 | 1991-12-27 | Chabot Stanislas De | Plate-forme elevatrice pour ebranchage forestier |
| US5111907A (en) * | 1990-02-20 | 1992-05-12 | Japanic Corporation | Lifting apparatus |
| DE4232949A1 (de) * | 1992-10-01 | 1994-04-07 | Josef Alois Huber | Hubvorrichtung |
| US6123715A (en) | 1994-07-08 | 2000-09-26 | Amplatz; Curtis | Method of forming medical devices; intravascular occlusion devices |
| US5846261A (en) * | 1994-07-08 | 1998-12-08 | Aga Medical Corp. | Percutaneous catheter directed occlusion devices |
| AU3201995A (en) * | 1994-08-01 | 1996-03-04 | Xxsys Technologies, Inc. | Apparatus and method for reinforcing vertical columns |
| GB2323106B (en) * | 1997-03-20 | 2001-10-24 | Trilogy Entertainments Plc | Elevated accomodation assembly |
| SE9801065D0 (sv) * | 1998-03-27 | 1998-03-27 | Alimak Ab | Anordning vid kuggstångsdrivna hissar, byggplattformar eller liknande |
| DE29806602U1 (de) * | 1998-04-09 | 1999-05-12 | BISON stematec Maschinenbau- und Hubarbeitsbühnen Produktionsgesellschaft mbH, 02708 Löbau | Teleskopausleger für Hubarbeitsbühnen |
| US6502667B1 (en) | 2001-03-08 | 2003-01-07 | Joycedayton Corporation | Ergonomic platform lift |
| WO2006129129A2 (fr) * | 2005-06-03 | 2006-12-07 | Monkey Tower Ltd | Tourelle d'acces telescopique |
| DE112006001827T5 (de) * | 2006-05-29 | 2008-05-08 | Shenzhen Han's Precision Mechatronics Co., Ltd. | Motor zum Antreiben optischer Elemente |
| US20080230321A1 (en) * | 2007-03-19 | 2008-09-25 | Frank Csaszar | Portable freestanding elevator |
| US20080302601A1 (en) * | 2007-06-06 | 2008-12-11 | Andrew Baker | Lift assembly |
| US7874544B2 (en) * | 2008-03-05 | 2011-01-25 | Dana Monroe | Lifting device |
| US8141683B1 (en) | 2009-04-30 | 2012-03-27 | Wurtec Elevator Products & Services | Expandable platform |
| US8413764B1 (en) * | 2009-09-29 | 2013-04-09 | David A. Cohen | Ladder safety device, systems and methods of arresting falls from ladders |
| US8714524B2 (en) * | 2009-12-16 | 2014-05-06 | Herkules Equipment Corporation | Belt-driven transportation system |
| US8662477B2 (en) * | 2009-12-16 | 2014-03-04 | Herkules Equipment Corporation | Belt-driven transportation system |
| US8733508B2 (en) | 2010-04-02 | 2014-05-27 | Herkules Equipment Corporation | Scissor lift assembly |
| US8794386B2 (en) * | 2011-07-01 | 2014-08-05 | Cardinal Gibbons High School | Folding forklift |
| US10597274B1 (en) * | 2011-11-15 | 2020-03-24 | Homecare Products, Inc. | Tower elevating assembly |
| US9422142B2 (en) | 2013-08-01 | 2016-08-23 | Herkules Equipment Corporation | Scissor-type lift assembly |
| CN103552956A (zh) * | 2013-11-12 | 2014-02-05 | 沈洪彬 | 一种升降台 |
| CN104925682B (zh) * | 2015-05-20 | 2017-01-04 | 河北建工集团有限责任公司 | 高空作业平台用上料系统 |
| US10160628B2 (en) * | 2016-03-24 | 2018-12-25 | Toyota Motor Engineering & Manufacturing North America, Inc. | Pneumatic lifting device |
| US10053333B2 (en) * | 2016-09-27 | 2018-08-21 | Toyota Motor Engineering & Manufacturing North America, Inc. | Platform lift |
| CN106430000B (zh) * | 2016-10-13 | 2018-07-03 | 国网山东省电力公司商河县供电公司 | 一种三级联动式电力辅助伸缩平台 |
| US10633234B2 (en) * | 2016-11-18 | 2020-04-28 | Aaron Christopher Meyer | Modular observation assembly and method |
| US10005652B1 (en) * | 2017-11-01 | 2018-06-26 | Kan Cui | Elevating lift with a stabilized movable base |
| CN108358131A (zh) * | 2017-12-29 | 2018-08-03 | 佛山杰致信息科技有限公司 | 一种建筑机械的爬升装置 |
| CN109626255A (zh) * | 2019-01-29 | 2019-04-16 | 珠海云洲智能科技有限公司 | 一种船用设备升降装置 |
| CN114616032A (zh) * | 2019-11-21 | 2022-06-10 | 3M创新有限公司 | 坠落防护系统 |
| US20220240497A1 (en) * | 2021-02-03 | 2022-08-04 | Joseph Albert PRICE | Extendable hunting stand with movable platform |
| US12054364B2 (en) * | 2021-10-21 | 2024-08-06 | Fall-Botics, Llc | Personal safety and fall protection systems |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DD39411A (fr) * | ||||
| US2632530A (en) * | 1950-07-03 | 1953-03-24 | Elmer A Wagner | Telescoping tower vehicle |
| US2910203A (en) * | 1958-01-17 | 1959-10-27 | Harold J Bell | Truck loading and unloading device |
| US3232382A (en) * | 1964-02-24 | 1966-02-01 | Buck Equipment Corp | Workman hoisting machine |
| US3378101A (en) * | 1966-08-12 | 1968-04-16 | Franklin D. Zeitler | Scaffold |
| CH504379A (de) * | 1969-03-12 | 1971-03-15 | Schellenberg Heinz | Fahrbare Hebe-Einrichtung |
| US3515243A (en) * | 1969-05-06 | 1970-06-02 | Joseph R Ellen Jr | Lift device |
| NL7303518A (fr) * | 1972-04-06 | 1973-10-09 | ||
| FR2192062B1 (fr) * | 1972-07-17 | 1978-05-12 | Chapelle Charles | |
| FR2294980A2 (fr) * | 1972-07-17 | 1976-07-16 | Sicoffe Sarl | Elevateur autonome perfectionne |
| JPS5324080Y2 (fr) * | 1973-04-05 | 1978-06-21 | ||
| US4000789A (en) * | 1976-02-18 | 1977-01-04 | Edward Engel | Portable scaffold |
| US4458785A (en) * | 1982-10-25 | 1984-07-10 | Bushnell Jr Sherman W | Lift |
-
1983
- 1983-07-11 FR FR8311920A patent/FR2549029B1/fr not_active Expired
-
1984
- 1984-07-10 MA MA20394A patent/MA20170A1/fr unknown
- 1984-07-10 DE DE8484420123T patent/DE3460220D1/de not_active Expired
- 1984-07-10 EP EP84420123A patent/EP0135452B1/fr not_active Expired
- 1984-07-10 AT AT84420123T patent/ATE20333T1/de not_active IP Right Cessation
- 1984-07-11 US US06/629,682 patent/US4619346A/en not_active Expired - Fee Related
- 1984-07-11 OA OA58338A patent/OA07744A/fr unknown
Also Published As
| Publication number | Publication date |
|---|---|
| ATE20333T1 (de) | 1986-06-15 |
| EP0135452A1 (fr) | 1985-03-27 |
| FR2549029A1 (fr) | 1985-01-18 |
| FR2549029B1 (fr) | 1987-01-30 |
| DE3460220D1 (en) | 1986-07-17 |
| OA07744A (fr) | 1985-08-30 |
| US4619346A (en) | 1986-10-28 |
| MA20170A1 (fr) | 1985-04-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP0135452B1 (fr) | Elévateur comportant au moins un mât télescopique | |
| EP0179712B1 (fr) | Chariot-brancard à plan de couche adaptable en hauteur | |
| EP0307331B1 (fr) | Installation pour la réparation et le contrôle de carrosseries de véhicules accidentés | |
| WO2006120347A1 (fr) | Etabli elevateur | |
| EP1479643B1 (fr) | Appareil de levage et manutention | |
| FR2708258A1 (fr) | Dispositif de marches élévatrices. | |
| EP0360702B1 (fr) | Grue repliable à flèche en deux ou trois éléments articulés les uns aux autres | |
| FR2769832A1 (fr) | Lit d'hospitalisation | |
| EP0803466B1 (fr) | Procédé et dispositif pour l'accès sécurisé à un poste de conduite élevé, notamment sur une grue à tour | |
| CA1312055C (fr) | Escalier repliable pour vehicules | |
| EP0393286A1 (fr) | Appareil de manutention automatique de charges allongées sur le toit d'un véhicule | |
| WO2017118644A1 (fr) | Abri stationnaire de stockage d'au moins une unité de stockage d'énergie électrique | |
| FR2701981A1 (fr) | Plateau d'échafaudage, et système de montage d'échafaudage utilisant ce plateau. | |
| WO2021148732A1 (fr) | Abri repliable de type gazebo | |
| EP0870725A1 (fr) | Dispositif d'échelles télescopiques et d'élément mobile guidé sur ces échelles, pour grue à tour | |
| FR2693180A1 (fr) | Nacelle extensible et chariot élévateur de personnel correspondant. | |
| EP1057776B1 (fr) | Grue avec flèche articulée | |
| EP0694001B1 (fr) | Dispositif elevateur de fauteuil roulant repliable sur le toit d'un vehicule automobile | |
| FR2659637A1 (fr) | Dispositif de levage pour conteneurs. | |
| FR2464351A1 (fr) | Dispositif pour amener des charges, notamment metriaux de construction, d'un emplacement determine a un autre emplacement espaces en hauteur et lateralement | |
| FR2636616A1 (fr) | Grue repliable a fleche en deux ou trois elements articules les uns aux autres | |
| FR2610272A1 (fr) | Dispositif de manutention, en particulier pour magasins a libre service | |
| FR2584300A1 (fr) | But de basket-ball relevable avec panneau reglable en hauteur | |
| EP0330642A1 (fr) | Nacelle mobile sur échelle | |
| FR2684656A1 (fr) | Appareil de levage. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| 17P | Request for examination filed |
Effective date: 19841220 |
|
| AK | Designated contracting states |
Designated state(s): AT BE CH DE FR GB IT LI LU NL SE |
|
| ITF | It: translation for a ep patent filed | ||
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): AT BE CH DE FR GB IT LI LU NL SE |
|
| REF | Corresponds to: |
Ref document number: 20333 Country of ref document: AT Date of ref document: 19860615 Kind code of ref document: T |
|
| REF | Corresponds to: |
Ref document number: 3460220 Country of ref document: DE Date of ref document: 19860717 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| ITTA | It: last paid annual fee | ||
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: FR Payment date: 19910620 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: GB Payment date: 19910621 Year of fee payment: 8 Ref country code: CH Payment date: 19910621 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 19910624 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: LU Payment date: 19910711 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: BE Payment date: 19910715 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: DE Payment date: 19910723 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: AT Payment date: 19910725 Year of fee payment: 8 |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: NL Payment date: 19910731 Year of fee payment: 8 |
|
| EPTA | Lu: last paid annual fee | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LU Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19920710 Ref country code: GB Effective date: 19920710 Ref country code: AT Effective date: 19920710 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19920711 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Effective date: 19920731 Ref country code: CH Effective date: 19920731 Ref country code: BE Effective date: 19920731 |
|
| BERE | Be: lapsed |
Owner name: COMABI S.A. Effective date: 19920731 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Effective date: 19930201 |
|
| GBPC | Gb: european patent ceased through non-payment of renewal fee |
Effective date: 19920710 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Effective date: 19930331 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: DE Effective date: 19930401 |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| EUG | Se: european patent has lapsed |
Ref document number: 84420123.6 Effective date: 19930204 |