EP0063784B1 - Hammerdruckvorrichtung mit einem eine Lichtschranke enthaltenden Tauchankermagnetsystem - Google Patents
Hammerdruckvorrichtung mit einem eine Lichtschranke enthaltenden Tauchankermagnetsystem Download PDFInfo
- Publication number
- EP0063784B1 EP0063784B1 EP19820103372 EP82103372A EP0063784B1 EP 0063784 B1 EP0063784 B1 EP 0063784B1 EP 19820103372 EP19820103372 EP 19820103372 EP 82103372 A EP82103372 A EP 82103372A EP 0063784 B1 EP0063784 B1 EP 0063784B1
- Authority
- EP
- European Patent Office
- Prior art keywords
- plunger
- armature
- magnet system
- time
- type magnet
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired
Links
Images
Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J9/00—Hammer-impression mechanisms
- B41J9/44—Control for hammer-impression mechanisms
- B41J9/46—Control for hammer-impression mechanisms for deciding or adjusting hammer-firing time
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J9/00—Hammer-impression mechanisms
- B41J9/16—Means for cocking or resetting hammers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J9/00—Hammer-impression mechanisms
- B41J9/26—Means for operating hammers to effect impression
- B41J9/38—Electromagnetic means
Definitions
- the invention relates to a drive device according to the preamble of patent claim 1.
- Plunger armature magnet systems as a drive device for the print hammer in type printing devices or the printer needles in mosaic printing devices are generally known in printing technology and have been used successfully.
- Such a plunger magnet system for a type printer is described in DE-OS 28 39 024.
- the timing of the magnet system is a major problem.
- the printing speed of the impact printer provided with such a plunger magnet system depends on how quickly it succeeds in returning the print hammer, which is designed as the armature of the magnet system, to its starting position without bouncing after the impression has been taken.
- the degree of damping includes strongly dependent on the number of copies used in the printing process.
- a submersible anchor system which contains a photo sensor.
- the photo sensor is designed to be adjustable and then emits an output signal when the anchor of the submersible anchor system passes through a specific point.
- the measurement signal generated by the photosensor serves to determine whether the armature is in the idle state or not, this criterion in turn being used to determine whether an adjustment movement can be carried out with the type wheel or not.
- Movement quantities of the armature are not recorded with such a device.
- EP-A-0 026 387 shows and describes a drive device for a folding armature magnet system, in which a folding armature drives the actual pressure tappet.
- the plunger is surrounded by a permanent magnet, which returns the plunger to its starting position after the impression has been taken.
- a sensing device inductively measures the flight time of the plunger from the start of the excitation pulse to the impact on the paper and the speed of the plunger. In the case of a first impression, the flight time is measured by a measuring device and, after the impression has been taken, compared with a stored flight time. If there is a deviation, the flight time is corrected in a subsequent print by influencing the excitation coil current of the hinged armature.
- print hammer in the following includes both the needles of a mosaic printer and the hammer of a type printing device.
- the object of the invention is to design a plunger magnet system of the type mentioned at the outset such that the flight time of the printing hammer can be corrected before the impression is taken.
- the plunger magnet system consists essentially of an excitation coil 3 and the plunger armature 4 serving as a drive element for the type wheel 1.
- the plunger armature 4 has two non-magnetic guide parts 5 and 6 which, together with bushings 7 and 8, prevent the plunger armature from reaching the surface 9 of the excitation coil radially 3 is pulled and thus prevented from its actual axial movement.
- the submersible armature 4 protrudes with its rear part through the bushing 8 and rests against a stop 11 under the action of a return spring 10 in the idle state.
- a sensor 12 in this case a photoelectric switching device, is made of a Infrared light barrier, the photo path being arranged in the range of movement of the submersible anchor 4.
- the plunger armature magnet is controlled via a control circuit arrangement which, for. B. can be carried out according to the block diagram of FIG. 2. It essentially consists of two flip-flops 13 and 14 for timing the circuit arrangement. Switching transistors 15, 16 and 17 connect the magnet coil 3 to a constant voltage source 19 as a function of the output signal of an amplifier 18, which regulates the excitation current with imprint and the braking current in the coil 3.
- the amplifier 18, which is connected as a current regulator, is also connected its positive output at a voltage divider consisting of resistors 20 to 24 and the associated switching transistor 25. Resistor 20 is designed as a potentiometer.
- the negative input of the amplifier 18 is connected to a measuring resistor 27 for determining the actual value of the current in the coil 3.
- the other resistors 28 to 32 are used in a known manner to adapt the switching transistors.
- the monostable flip-flop 14 is linked to the output of the photoelectric switching device 12 via a delay element 33.
- the circuit arrangement is controlled via a z. B. Triggered by a keyboard, not shown here, pulse 34.
- the flip-flops 13 and 14 are connected via an OR gate 35 to the control input of the switching transistor 17.
- the drive device has an armature control device 36. It contains a measuring element 27 linked to the pulse input 34 and the sensor 12 and a comparison control device 30 provided with a memory 38 and a comparator 39, the output of which is connected to the reset input of the flip-flop 13.
- a z. B. designed as a warning lamp function warning device 41 is linked to the time measuring element 37. Their function will be explained later. The same applies to the measuring element 42 required for the basic setting of the impression energy after the immersion armature magnet system has been installed in the pressure device.
- the immersion anchor detection system shown in FIG. 1 is explained below with reference to FIG. 2 and the voltage-time diagram of FIG. 3. 3, the upper pulse train shows the course of the excitation pulses at the output of the OR gate 35 and the lower pulse train shows the course of the excitation pulses at the output of the sensor 12.
- flip-flop 13 is set via the start pulse input at input 34 and the control path of transistors 17 and 25 is thus interrupted via OR gate 35. This makes the current control device effective.
- the switching transistor 16 and the power transistor 15 become conductive, as a result of which the current in the excitation coil 3 increases suddenly up to the maximum value determined by the control device.
- the armature 4 is accelerated under the effect of the generated magnetic field.
- the time measuring element 37 of the armature control device 36 begins, which, for. B. can be designed as a counter, its operation.
- the light barrier opens and a rectangular pulse with a falling edge occurs at the output of sensor 12. This rectangular pulse stops the time measuring element 37 and the result of the measurement is fed to a comparison control device 40.
- This comparison control device 40 can e.g. B. be designed as a microprocessor and contains a memory 38 with associated central control unit 39.
- the path per unit of time running from the anchor from the stop to the light cabinets is a measure of the pressure energy applied. If the throughput time determined by the time measuring element 37 differs from the target time stored in the memory 38, then the central unit 39 controls accordingly the resetting of the flip-flop 13 at the time T3. At time T3, the flip-flop 13 is returned to its original position. The transistors 17 and 25 thus become conductive again, the current regulation being interrupted and the power transistor 15 being switched off. The armature control device 36 thus controls the time length of the activation of the transistor 15 and thus the excitation current in the coil 3 via the flip-flop 13.
- the output signal of the sensor 12 delayed by the time A via the timing element 33 activates the monostable flip-flop 14 that can be set with a rising pulse edge which interrupts the switching transistor 17 again via the OR gate 35 at the time T5 and thus activates the coil 3.
- the switching transistor 25 is in the conductive state because of the flip-flop 13, so that the amplifier 18 regulates the excitation current in the coil 3 to a lower braking current in this case.
- the armature 4 is completely braked by this braking current and can lay down against the stop 11 without reverberation.
- the monostable multivibrator 14 tilts back into its original position, which makes the transistor 17 conductive again and thus interrupts the excitation current in the coil 3 via the power transistor 17.
- Another impression cycle can be started by a new start pulse 35.
- the circuit arrangement is also equipped with a function warning device 41.
- This function warning device is connected, for example, to the time measuring element 37 and then emits a warning signal if not within a certain period of time after the start of the
- Submersible magnet system passes the end of the armature 4, the light barrier 12.
- Exceeding this time period indicates a malfunction of the plunger magnet system.
- This can e.g. B. a break in the armature or a defect in the excitation coil.
- the function warning device itself can consist of a comparator which compares the counter reading of the time measuring element 37 with a stored target value and activates a warning device when exceeded.
- the basic setting of the impression energy can be accomplished in a simple manner after the plunger magnet system has been installed in the pressure device.
- the control circuit arrangement has a potentiometer 20, by means of which the maximum excitation current in the coil 3 can be set.
- a measuring element 42 can be coupled to the output of the sensor 12.
- B. can consist of a time measuring device with associated display device, via which the throughput time of the armature is measured from the initial interruption of the light barrier to the interruption of the light barrier when the armature returns to the starting position.
- This lead time of the armature is a measure of the impression energy and with the basic setting of the immersion armature magnet system after installation in the pressure seal, this time can be compared with a predetermined target time and a basic setting of the excitation current in the coil 3 can be made by changing the potentiometer 20.
- the design of the drive device is not limited to the example shown. Other embodiments are also conceivable for the individual elements.
- the sensor 12 can e.g. can also be an element that detects the movement of the armature by induction, or two sensors can be arranged in the armature path.
Landscapes
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Impact Printers (AREA)
Description
- Die Erfindung betrifft eine Antriebsvorrichtung gemäß dem Oberbegriff des Patentanspruches 1.
- Tauchankermagnetsysteme als Antriebsvorrichtung für den Druckhammer in Typendruckeinrichtungen oder die Druckernadeln in Mosaikdruckeinrichtungen sind in der Drucktechnik allgemein bekannt und mit Erfolg zur Anwendung gelangt. So wird in der DE-OS 28 39 024 ein derartiges Tauchankermagnetsystem für einen Typendrucker beschrieben.
- Bei der Verwendung von Tauchankermagnetsystemen in Anschlagdruckern bildet ein wesentliches Problem die zeitliche Ansteuerung des Magnetsystemes. So hängt die Druckgeschwindigkeit des mit einem derartigen Tauchankermagnetsystem versehenen Anschlagdruckers davon ab, wie schnell es gelingt, den als Anker des Magnetsystems ausgebildeten Druckhammer nach erfolgtem Abdruck prellfrei in seine Ausgangslage zurückzubringen.
- Bei Klappankermagnetsystemen ist es aus der DE-OS 29 33 616 bei einer Dämpfungsvorrichtung für den elektromagnetischen Antrieb des Druckhammers in einer Druckhammeranordnung bekannt, das Magnetsystem über eine den Erregerstrom der Magnetspule ansteuernden Schaltungsanordnung so anzusteuern, daß nach Beschleunigung des Ankerhebels mit zugehörigem Druckhammer, der Erregerstrom auf einen wesentlich geringer dimensionierten Haltestrom zurückgeschaltet wird, bzw. daß nach erfolgtem Abdruck über eine erneute Betätigung des Magnetsystems der Druckhammer abgebremst wird.
- Die Rückkehrgeschwindigkeit des Ankers nach efolgtem Abdruck im Tauchankermagnetsystem und damit die Zeit, die vergeht, bis das Tauchankermagnetsystem erneut aktiviert werden kann, hängt stark von der Dämpfung ab, die der Druckhammer am Aufzeichnungsträger erfährt. Der Dämpfungsgrad ist dabei u.a. stark von der Anzahl der verwendeten Durchschläge beim Druckvorgang abhängig.
- Es ist weiter aus dem IBM Technical Disclosure Bulletin Vol. 18, Nr. 12, Mai 1976, Seite 4072 ein Tauchankersystem bekannt, das einen Fotosensor enthält. Der Fotosensor ist einstellbar ausgebildet und gibt dann ein Ausgangssignal ab, wenn der Anker des Tauchankersystems einen spezifischen Punkt durchläuft. Das von dem Fotosensor generierte Meßsignal dient dazu, festzustellen ob sich der Anker im Ruhezustand befindet oder nicht, wobei dieses Kriterium wiederum dazu verwendet wird, festzustellen, ob mit dem Typenrad eine Einstellbewegung durchgeführt werden kann oder nicht.
- Bewegungsgrößen des Ankers werden mit einer derartigen Einrichtung nicht erfaßt.
- Die EP-A-0 026 387 zeigt und beschreibt eine Antriebsvorrichtung für ein Klappankermagnetsystem, bei dem ein Klappanker den eigentlichen Druckstößel antreibt. Der Druckstößel ist von einem Dauermagneten umgeben, der den Druckstößel nach dem erfolgtem Abdruck in seine Ausgangslage zurückführt. Eine Fühleinrichtung mißt induktiv die Flugzeit des Stößels von dem Beginn des Erregerimpulses an bis zum Aufschlag am Papier und die Geschwindigkeit des Stößels. Bei einem ersten Abdruck wird über eine Meßeinrichtung die Flugzeit gemessen, und nach erfolgtem Abdruck mit einer gespeicherten Flugzeit verglichen. Bei Abweichung wird in einem nachfolgenden Abdruck durch Einflußnahme auf den Erregerspulenstrom des Klappankers die Flugzeit korrigiert.
- Der Begriff Druckhammer umfaßt im folgenden sowohl die Nadeln eines Mosaikdruckers als auch den Hammer einer Typendruckeinrichtung.
- Aufgabe der Erfindung ist es, ein Tauchankermagnetsystem der eingangs genannten Art derart auszugestalten, daß eine Korrektur der Flugzeit des Druckhammers noch vor dem Abdruck möglich ist.
- Diese Aufgabe wird bei einem Tauchankermagnetsystem der eingangs genannten Art gemäß dem kennzeichnenden Teil des Patentanspruches 1 gelöst.
- Weitere vorteilhafte Ausführungsformen der Erfindung sind durch die Unteransprüche gekennzeichnet.
- Eine Ausführungsform der Erfindung ist in den Zeichnungen dargestellt und wird im folgenden beispielsweise näher beschrieben. Es zeigen
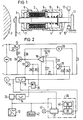
- Fig. 1 ein Schnittbild eines mit einem Sensor (Lichtschranke) versehenen Tauchankermagnetsystems,
- Fig. 2 ein Blockschaltbild einer Ansteuerschaltungsanordnung für das Tauchankermagnetsystem und
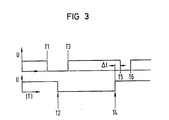
- Fig. 3 eine schematische Darstellung der Ausgangsimpulse der fotoelektrischen Einrichtung beim Abdruck mit den zugehörigen Ansteuerimpulsen für das Magnetsystem.
- Bei der in der Fig.1 schematisch dargestellten Druckeinrichtung für eine Fernschreib- oder Schreibmaschine wird über ein im folgenden näher beschriebenes Tauchankermagnetsystem ein Typenrad 1, das gegenüber einer Schreibwalze 2 angeordnet ist, betätigt. Das Tauchankermagnetsystem besteht im wesentlichen aus einer Erregerspule 3 und dem als Antriebselement für das Typenrad 1 dienenden Tauchanker 4. Der Tauchanker 4 besitzt zwei unmagnetische Führungsteile 5 und 6, die zusammenmit Buchsen 7 und 8 verhindern, daß der Tauchanker radial an die Fläche 9 der Erregerspule 3 gezogen und damit an seiner eigentlichen axialen Bewegung gehindert wird. Der Tauchanker 4 ragt mit seinem hinteren Teil durch die Buchse 8 und liegt im Ruhezustand unter der Wirkung einer Rückstellfeder 10 an einem Anschlag 11 an. Im Bereich des hinteren Teiles des Tauchankermagnetsystems ist ein Sensor 12, in diesem Falle eine fotoelektrische Schalteinrichtung, aus einer Infrarotlichtschranke, wobei die Fotostrecke im Bewegungsbereich des Tauchankers 4 angeordnet ist.
- Angesteuert wird der Tauchankermagnet über eine Ansteuerschaltungsanordnung, die z. B. entsprechend dem Blockschaltbild der Fig. 2 ausgeführt sein kann. Sie besteht im wesentlichen aus zwei Kippstufen 13 und 14 zur zeitlichen Ansteuerung der Schaltungsanordnung. Schalttransistoren 15, 16 und 17 verbinden die Magnetspule 3 in Abhängigkeit von dem Ausgangssignal eines Verstärkers 18, der den Erregerstrom bei Abdruck und den Bremsstrom in der Spule 3 regelt, mit einer Konstantspannungsquelle 19. Der Verstärker 18, der als Stromregler geschaltet ist, liegt mit seinem positiven Ausgang an einem Spannungsteiler aus den Widerständen 20 bis 24 und dem zugeordneten Schalttransistor 25. Dabei ist der Widerstand 20 als Potentiometer ausgebildet. Der Schalttransistor 25, der über die Kippstufe 13 angesteuert wird, verändert in Abhängigkeit von dem gewünschten Strom in der Spule 3 das Teilerverhältnis des Spannungsteilers 20 bis 24, der über den Widerstand 20 mit einer Referenzspannungsquelle 26 in Verbindung steht. Der negative Eingang des Verstärkers 18 liegt an einem Meßwiderstand 27 zur Feststellung des Istwertes des Stromes in der Spule 3 an. Die weiteren Widerstände 28 bis 32 dienen in bekannter Weise zur Anpassung der Schalttransistoren. Das monostabile Kippglied 14 ist über ein Verzögerungsglied 33 mit dem Ausgang der fotoelektrischen Schalteinrichtung 12 verknüpft. Angesteuert wird die Schaltungsanordnung über einen z. B. von einer hier nicht dargestellten Tastatur ausgelösten Impuls 34. Die Kippstufen 13 und 14 stehen über ein ODER-Glied 35 mit dem Steuereingang des Schalttransistors 17 in Verbindung.
- Weiters weist die Antriebsvorrichtung eine Ankeransteuereinrichtung 36 auf. Sie enthält eine mit dem Impulseingang 34 und dem Sensor 12 verknüpftes Meßglied 27 und eine mit einem Speicher 38 und einem Vergleicher 39 versehene Vergleichssteuereinrichtung 30, deren Ausgang mit dem Rücksetzeingang der Kippstufe 13 in Verbindung steht.
- Eine z. B. als Warnlampe ausgebildete Funktionswarneinrichtung 41 ist mit dem Zeitmeßglied 37 verknüpft. Ihre Funktion wird später erläutert. Dasselbe gilt für das zur Grundeinstellung der Abdruckenergie nach dem Einbau des Tauchankermagnetsystems in die Druckeinrichtung benötigte Meßglied 42.
- Die eigentliche Funktion des in der Fig. 1 dargestellten Tauchankermeldesystems wird im folgenden anhand der Fig. 2 und dem Spannungszeitdiagramm der Fig. 3 erläutert. Dabei zeigt in der Fig. 3 der obere Impulszug den Verlauf der Erregerimpulse am Ausgang des ODER-Gliedes 35 und der untere Impulszug den Verlauf der Erregerimpulse am Ausgang des Sensors 12.
- Zum Zeitpunkt T1 wird über den am Eingang 34 eingegebenen Startimpuls die Kippstufe 13 gesetzt und damit über das ODER-Glied 35 die Steuerstrecke der Transistoren 17 und 25 unterbrochen. Dadurch wird die Stromregeleinrichtung wirksam. Der Schalttransistor 16 und der Leistungstransistor 15 werden leitend, womit der Strom in der Erregerspule 3 sprungartig bis zu dem durch die Regeleinrichtung bestimmten Maximalwert ansteigt.
- Unter der Wirkung des erzeugten Magnetfeldes wird der Anker 4 beschleunigt. Gleichzeitig beginnt das Zeitmeßglied 37 der Ankersteuereinrichtung 36, das z. B. als Zähler ausgebildet sein kann, seinen Betrieb. Zum Zeitpunkt T2 öffnet sich die Lichtschranke und am Ausgang des Sensors 12 tritt ein Rechteckimpuls mit abfallender Flanke auf. Dieser Rechteckimpuls stoppt das Zeitmeßglied 37 und das Ergebnis der Messung wird einer Vergleichssteuereinrichtung 40 zugeführt. Diese Vergleichssteuereinrichtung 40 kann z. B. als Mikroprozessor ausgebildet sein und enthält einen Speicher 38 mit zugehöriger Zentralsteuereinheit 39.
- Der von dem Anker vom Anschlag bis zur Lichtschränke durchlaufende Weg pro Zeiteinheit ist ein Maß für die aufgebrachte Druckenergie. Weicht die von dem Zeitmeßglied 37 festgestellte Durchlaufzeit von der im Speicher 38 gespeicherten Sollzeit ab, dann steuert die Zentraleinheit 39 entsprechend das Rücksetzen der Kippstufe 13 zum Zeitpunkt T3. Zum Zeitpunkt T3 wird die Kippstufe 13 in ihre ursprüngliche Lage zurückgeführt. Damit werden die Transistoren 17 und 25 erneut leitend, wobei die Stromregelung unterbrochen und der Leistungstransistor 15 abgeschaltet wird. Die Ankersteuereinrichtung 36 steuert damit über die Kippstufe 13 die zeitliche Länge der Ansteuerung des Transistors 15 und damit den Erregerstrom in der Spule 3.
- Nach Rückkehr des Tauchankers 4 von der Abdruckstelle unterbricht er mit seinem hinteren Ende 6 zum Zeitpunkt T4 erneut die Lichtschranke des Sensors 12.
- Da es sich um den Übergang vom ununterbrochenen zum unterbrochenen Sensorstrahl und damit um die ansteigende Flanke des unteren Impulszuges der Fig. 3 handelt, aktiviert das um die Zeit A über das Zeitglied 33 verzögerte Ausgangssignal des Sensors 12 die monostabile, mit ansteigender Impulsflanke setzbarer Kippstufe 14, die zum Zeitpunkt T5 den Schalttransistor 17 über das ODER-Glied 35 erneut unterbricht und damit die Spule 3 aktiviert. Der Schalttransistor 25 befindet sich wegen der Kippstufe 13 im leitenden Zustand, so daß der Verstärker 18 den Erregerstrom in der Spule 3 auf einen in diesem Falle niedrigeren Bremsstrom ausregelt. In der verbleibenden Wegstrecke des Ankers 4 bis zum Anschlag 11 wird der Anker 4 durch diesen Bremsstrom vollständig abgebremst und kann sich ohne Nachschwingungen an den Anschlag 11 anlegen. Zum Zeitpunkt T6 kippt die monostabile Kippstufe 14 in ihre ursprügliche Lage zurück, womit der Transistor 17 erneut leitend wird und damit den Erregerstrom in der Spule 3 über den Leistungstransistor 17 unterbricht. Durch einen erneuten Startimpuls 35 kann ein weiterer Abdruckzyklus gestartet werden.
- Zusätzlich ist die Schaltungsanordnung noch mit einer Funktionswarneinrichtung 41 ausgestattet. Diese Funktionswarneinrichtung steht beispielsweise mit dem Zeitmeßglied 37 in Verbindung und gibt dann ein Warnsignal ab, wenn nicht innerhalb einer bestimmten Zeitspanne nach Start des
- Tauchankermagnetsystems das Ende des Ankers 4 die Lichtschranke 12 passiert.
- Ein Überschreiten dieser Zeitspanne weist auf eine Störung des Tauchankermagnetsystems hin. Dies kann z. B. ein Bruch des Ankers oder ein Defekt der Erregerspule sein. Selbstverständlich ist es auch möglich, anstelle der Zeitspanne die Zeit eines gesamten Abdruckzyklus, d.h. also die zweimalige Unterbrechung der Lichtschranke als Maß für eine Funktionswarneinrichtung zu verwenden. Die Funktionswarneinrichtung selbst kann in ihrer einfachsten Form aus einem Vergleicher bestehen, der den Zählerstand des Zeitmeßgliedes 37 mit einem abgespeicherten Sollstand vergleicht und bei Überschreitung eine Warneinrichtung aktiviert.
- Mit dem vorher beschriebenen Tauchankermagnetsystem läßt sich in einfacher Weise die Grundeinstellung der Abdruckenergie nach dem Einbau des Tauchankermagnetsystems in die Druckeinrichtung bewerkstelligen. Zu diesem Zwecke weist die Ansteuerschaltungsanordnung einen Potentiometer 20 auf, über das der maximale Erregerstrom in der Spule 3 einstellbar ist. Zusätzlich dazu ist an den Ausgang des Sensors 12 ein Meßglied 42 ankoppelbar, das z. B. aus einer Zeitmeßeinrichtung mit zugehöriger Anzeigeeinrichtung bestehen kann, über das die Durchlaufzeit des Ankers von der Anfangsunterbrechung der Lichtschranke bis zur Unterbrechung der Lichtschranke bei der Rückkehr des Ankers in die Ausgangslage gemessen wird. Diese Durchlaufzeit des Ankers ist ein Maß für die Abdruckenergie und bei der Grundeinstellung des Tauchankermagnetsystems nach dem Einbau in die Druckeintichtung kann man diese Zeit mit einer vorgegebenen Sollzeit vergleichen und durch Verändern des Potentiometers 20 eine Grundeinstellung des Erregerstromes in der Spule 3 vornehmen. Damit entfällt die bei sonstigen Magnetsystemen erforderliche mechanische Veränderung des Abstandes zwischen dem Aufzeichnungsträger und dem Druckhammer. Weiters ist es dadurch möglich, die bei der Fertigung zwangsläufig auftretenden Toleranzen und die dadurch hervorgerufenen Schwankungen des magnetischen Materials und des Spulenstromes auszugleichen.
- Selbstverständlich ist die Ausführung der Antriebsvorrichtung nicht auf das dargestellte Beispiel beschränkt. So sind für die einzelnen Elemente noch andere Ausführungsformen denkbar. Der Sensor 12 kann z.E. auch ein die Bewegung des Ankers durch Induktion erfassendes Element sein, oder es können im Ankerweg zwei Sensoren angeordnet sein.
Claims (7)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE19813116430 DE3116430C2 (de) | 1981-04-24 | 1981-04-24 | Hammerdruckvorrichtung mit einem einen optoelektronischen Sensor enthaltenden Tauchankermagnetsystem |
| DE3116430 | 1981-04-24 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| EP0063784A2 EP0063784A2 (de) | 1982-11-03 |
| EP0063784A3 EP0063784A3 (en) | 1985-01-09 |
| EP0063784B1 true EP0063784B1 (de) | 1987-07-01 |
Family
ID=6130796
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| EP19820103372 Expired EP0063784B1 (de) | 1981-04-24 | 1982-04-21 | Hammerdruckvorrichtung mit einem eine Lichtschranke enthaltenden Tauchankermagnetsystem |
Country Status (2)
| Country | Link |
|---|---|
| EP (1) | EP0063784B1 (de) |
| DE (1) | DE3116430C2 (de) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4547087A (en) * | 1983-01-20 | 1985-10-15 | Siemens Aktiengesellschaft | Microprocessor-controlled printing mechanism having an opto-electronic sensor |
| DE3346133A1 (de) * | 1983-12-21 | 1985-07-04 | Ibm Deutschland Gmbh, 7000 Stuttgart | Automatische flugzeitmessung in anschlagdruckern |
| US4678355A (en) * | 1985-07-02 | 1987-07-07 | Xerox Corporation | Print tip contact sensor for quiet impact printer |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2130804A5 (de) * | 1971-02-23 | 1972-11-10 | Nortec Computer Devices | |
| AU521251B2 (en) * | 1977-09-14 | 1982-03-25 | Exxon Research And Engineering Company | Hammer for impact printer |
| DE2933616C2 (de) * | 1979-08-20 | 1982-09-23 | Siemens AG, 1000 Berlin und 8000 München | Dämpfungsvorrichtung für einen als Klappankermagnetsystem ausgebildeten elektromagnetischen Antrieb für den Druckhammer in einer Druckhammeranordnung |
| US4347786A (en) * | 1979-10-01 | 1982-09-07 | International Business Machines Corporation | Impact printer hammer flight time and velocity sensing means |
| US4429342A (en) * | 1981-04-24 | 1984-01-31 | Siemens Aktiengesellschaft | Impact printing device with an improved print hammer |
-
1981
- 1981-04-24 DE DE19813116430 patent/DE3116430C2/de not_active Expired
-
1982
- 1982-04-21 EP EP19820103372 patent/EP0063784B1/de not_active Expired
Also Published As
| Publication number | Publication date |
|---|---|
| DE3116430C2 (de) | 1983-03-31 |
| EP0063784A3 (en) | 1985-01-09 |
| DE3116430A1 (de) | 1982-11-18 |
| EP0063784A2 (de) | 1982-11-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| DE2847492C2 (de) | Schaltungsanordnung in einem Druckwerk mit einer Stoßvorrichtung | |
| DE69028802T2 (de) | Erfassung des Einschaltens einer Spule | |
| DE2629096C3 (de) | Steuerschaltung für einen Schrittmotor | |
| DE2602906C2 (de) | ||
| DE69006980T2 (de) | Vorrichtung zur Steuerung des Zwischenraumes zwischen den Blättern bei Druckern und Verfahren zur Steuerung des Zwischenraumes. | |
| DE2928304C2 (de) | Steuerschaltung zum Aufrechterhalten einer konstanten Farbintensität bei einer thermischen Aufzeichnungsvorrichtung | |
| DE2602880A1 (de) | Elektromagnetisches regelsystem mit wendedetektor | |
| EP0064632B1 (de) | Druckhammervorrichtung | |
| EP0116850B1 (de) | Mikroprozessorgesteuertes, einen optoelektronischen Sensor enthaltendes Tauchanker-Drucksystem | |
| DE2908235C2 (de) | Vorrichtung an einer Einspritzpumpe mit einer Regelstange zur Einstellung der Fördermenge von Brennstoff für den Betrieb einer Brennkraftmaschine | |
| DE29703587U1 (de) | Elektromagnetischer Aktuator mit Näherungssensor | |
| DE3727283C2 (de) | ||
| EP0063784B1 (de) | Hammerdruckvorrichtung mit einem eine Lichtschranke enthaltenden Tauchankermagnetsystem | |
| DE2848786C3 (de) | Schaltungsanordnung für die Synchronisierung der Auftrittszeitpunkte von Druckhammeraufschlag mit dem Eintreffen der Drucktype an der Druckstelle | |
| DE3116402C2 (de) | Rückprallarmes Tauchankermagnetsystem | |
| DE3530842C2 (de) | Verfahren zur Steuerung der Bewegung der Abstasteinrichtung eines Kopiergerätes in die Ausgangsposition | |
| DE2511260C3 (de) | Schaltungsanordnung in einer Strickmaschine | |
| DE3739295C1 (de) | Verfahren zur Rueckpralldaempfung bei Druckhammermagneten in Schreib- oder aehnlichen Bueromaschinen | |
| DE69204015T2 (de) | Antrieb für Punktnadelkopf. | |
| EP0406236B1 (de) | Einrichtung zum überwachen des transports von blattförmigen aufzeichnungsträgern in einem elektrofotografischen drucker | |
| DE3001908C2 (de) | Einrichtung zur Messung des Drehwinkels einer Welle einer Maschine | |
| DE3919310C2 (de) | ||
| DE3730937C2 (de) | ||
| DE10152947A1 (de) | Verfahren und Vorrichtung zum Erfassen eines Medienpegels in einer Kassette | |
| DE2404799A1 (de) | Steuerschaltung fuer die ausrichtung von druckhaemmern in schnelldruckern |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PUAI | Public reference made under article 153(3) epc to a published international application that has entered the european phase |
Free format text: ORIGINAL CODE: 0009012 |
|
| AK | Designated contracting states |
Designated state(s): CH FR GB IT NL SE |
|
| PUAL | Search report despatched |
Free format text: ORIGINAL CODE: 0009013 |
|
| AK | Designated contracting states |
Designated state(s): CH FR GB IT LI NL SE |
|
| 17P | Request for examination filed |
Effective date: 19841213 |
|
| GRAA | (expected) grant |
Free format text: ORIGINAL CODE: 0009210 |
|
| AK | Designated contracting states |
Kind code of ref document: B1 Designated state(s): CH FR GB IT LI NL SE |
|
| ET | Fr: translation filed | ||
| ITF | It: translation for a ep patent filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: GB Effective date: 19880421 |
|
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: LI Effective date: 19880430 Ref country code: CH Effective date: 19880430 |
|
| PLBE | No opposition filed within time limit |
Free format text: ORIGINAL CODE: 0009261 |
|
| STAA | Information on the status of an ep patent application or granted ep patent |
Free format text: STATUS: NO OPPOSITION FILED WITHIN TIME LIMIT |
|
| 26N | No opposition filed | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: NL Effective date: 19881101 |
|
| NLV4 | Nl: lapsed or anulled due to non-payment of the annual fee | ||
| GBPC | Gb: european patent ceased through non-payment of renewal fee | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: FR Free format text: LAPSE BECAUSE OF NON-PAYMENT OF DUE FEES Effective date: 19881229 |
|
| REG | Reference to a national code |
Ref country code: CH Ref legal event code: PL |
|
| REG | Reference to a national code |
Ref country code: FR Ref legal event code: ST |
|
| PGFP | Annual fee paid to national office [announced via postgrant information from national office to epo] |
Ref country code: SE Payment date: 19890428 Year of fee payment: 8 |
|
| ITTA | It: last paid annual fee | ||
| PG25 | Lapsed in a contracting state [announced via postgrant information from national office to epo] |
Ref country code: SE Effective date: 19900422 |
|
| EUG | Se: european patent has lapsed |
Ref document number: 82103372.7 Effective date: 19910115 |