-
Die
Erfindung bezieht sich auf ein Verfahren und eine Einrichtung zur
Erzeugung von Bildern durch Computer. Insbesondere bezieht sich
die Erfindung auf das Schattieren von Computerbildern.
-
In
einem Computergraphiksystem, welches digitale Bilder erzeugt, wird
die Oberfläche
eines Objekts typischerweise durch ein Netzwerk von ebenen Polygonen
dargestellt. Diese Polygone können
durch Benutzung bekannter Techniken schnell transformiert und wiedergegeben
werden. Bei diesen Techniken wird angenommen, daß die Eingangsgröße ein einfaches
Dreieck ist, bei dem die Attribute der Eckpunkte die Position, die
Normale und die Farbe sind. Die Lage des Eckpunkts ist beispielsweise
im Objektkoordinatenraum definiert. Die Eckpunktnormalen sind Einheitsvektoren,
welche die Oberflächenorientierung
an jedem Eckpunkt beschreiben. Die Eckpunktfarbe spezifiziert die
eigene Farbe des Objekts. Die Eckpunktfarbe gestattet es, die Farbe
des Objekts über
das Dreieck zu variieren.
-
Um
ein realistisches Bild eines Objekts auf einem Computergraphikdisplay
zu erzeugen, muß nicht
nur der Umriß des
Objekts erzeugt werden, sondern es muß auch die Schattierung der
sichtbaren Oberflächen
des Objekts eingeschlossen werden, wobei die Lichtquellen, Oberflächencharakteristiken
und die Anordnungen und Orientierungen der Oberflächen und
Quellen zu berücksichtigen
sind. Eine Kombination von drei Reflexionsfunktionen kann benutzt
werden, um die Schattierung eines Bildes zu bestimmen. Diese drei
Reflexionsfunktionen sind die ambiente, die diffuse und die spiegelnde
Reflexion. Die ambiente Reflexion ist das Licht von willkürlich angeordneten
Lichtquellen, welches das Objekt absorbiert und dann ausstrahlt.
Hierbei gibt es keine Abhängigkeit
von der Richtung des Lichts. Die ambiente Funktion wichtet einfach
die Farbe des Objekts. Beispielsweise kann mit den ambienten Gewichten
für rot,
grün und
blau, Kar, Kag,
Kab, die Funktion der ambienten Reflexion
wie folgt beschrieben werden: Iar =
Kar·Cr Iag =
Kag·Cg Iab =
Kab·Cb,wobei Iar,
Iag, Iab die ambienten
Reflexionen für
den roten, grünen
und blauen Farbbestandteil, Kar, Kag, Kab die ambienten
Gewichte für
die Farbbestandteile Rot, Grün
und Blau und Cr, Cg,
Cb die Objektfarben oder Farbintensitäten für die roten,
grünen
und blauen Bestandteile des Objekts sind. Der Wertebereich der ambienten Gewichte
ist: 0 ≤ Kar ≤ 1,
0 ≤ Kag ≤ 1,
0 ≤ Kab ≤ 1
-
Es
sollte angemerkt werden, daß die
ambienten Gewichte Kar, Kag,
Kab und die unten genannten Gewichte der
diffusen Reflexion Kdr, Kdg,
Kdb in Wirklichkeit ein Produkt aus zwei
Termen sind. Der erste Term drückt
die Lichtintensität
der Komponente aus. Der zweite Term drückt die Fähigkeit der Objektoberfläche aus, diese
Komponente zu reflektieren. Da keiner der Terme von der Geometrie
der Szene abhängt,
werden in den vorliegenden Betrachtungen die zwei Terme in den Gewichten
kombiniert. Enthält
die Szene mehrfache Lichtquellen, so gibt es separate Gewichte für jede Lichtquelle.
-
Stumpfe,
matte Oberflächen
zeigen diffuse Reflexionen, die das Licht gleichmäßig in alle
Richtungen streuen, so daß die
Oberfläche
aus allen Blickwinkeln die gleiche Helligkeit zu haben scheint.
Bei solchen Oberflächen
setzt das Lambert'sche
Kosinus-Gesetz die Menge des reflektierten Lichtes zum Kosinus des Winkels α zwicgen
der Richtung L zur Punktlichtquelle und dem Normalenvektor N der
Oberfläche,
wie sie in 1a dargestellt
sind, in Beziehung. Die diffuse Reflexion kann durch die folgende
Gleichung ausgedrückt werden: Idr = cos(α)·Kdr·Cr Idg =
cos(α)·Kdg·Cg Idb =
cos(α)·Kdb·Cb,wobei cos(α) = N·L ist (da die diffuse Reflexion
einen positiven Wert haben muß,
ist für
die Berechnung von cos(α)
zu for dern: cos(α)
= max(cos(α),
0).), Idr, Idg bzw.
Idb die diffusen Reflexionswerte für die roten,
grünen und
blauen Elemente, Kdr, Kdg und Kdb die diffusen Reflexionskoeffizienten
für die
roten, grünen
und blauen Elemente der Lichtquelle (welche eine Konstante zwischen
0 und 1 sind und in Abhängigkeit
vom Material der Oberfläche
variieren) und Cr, Cg,
und Cb die Farben der roten, grünen und
blauen Elemente der Oberfläche sind.
-
Die
spiegelnde Reflexion ist das auf einer glänzenden Oberfläche zu beobachtende
Glanzlicht. Das von Bui Tuong-Phong entwickelte Modell modelliert
die spiegelnde Reflexion als eine Funktion vom Kosinus des Winkels
zwischen V, dem Vektor zum Punkt des Beobachters, und R, dem Vektor,
der in Richtung der maximalen Reflexion zeigt, wie es in 1b dargestellt ist (Phong,
B.T. "Illumination
for Computer Generated Images",
PhD Dissertation, Dept. of Computer Science, University of Utah,
Salt Lake City, Gov. Ordering No. AD-A0008-786 (Juli 1973)). Für weitere
Informationen über
die ambiente, die diffuse und die spiegelnde Reflexion siehe auch:
Foley und Van Dam "Fundamentals
of Interactive Computer Graphics",
(Addison Wesley 1983), Seiten 575–580; und Cook und Torrance, "A Reflectance Model
For Computer Graphics",
Computer Graphics, Bd. 15, Nr. 3, August 1981.
-
Die
reflektierte Lichtmenge ist additiv. Folglich wird, wenn drei separate
Lichtquellen auf eine Oberfläche
scheinen, die auf der Oberfläche
reflektierte Lichtmenge dadurch berechnet, daß die Reflexionsstärke in bezug
auf jede Lichtquelle bestimmt und die für alle Lichtquellen bestimmten
Reflexionsanteile summiert werden. Bei der Bestimmung der Art und
der Menge der Reflexion sollte man sich vergegenwärtigen,
daß es
drei verschiedene Arten von Lichtquellen gibt. Ein Fall tritt auf,
wenn in der Lösung
angenommen wird, daß die
Entfernung zum Licht unendlich ist. Die Beschreibung der Lichtquelle
reduziert sich zu dem folgenden einfachen Lichtvektor:
L = (Lx, Ly, Lz), wobei sich der Betrag
des Lichtvektors zu
ergibt und der Wert von |L|
gleich 1 für
eine Lichtquelle im Unendlichen ist.
-
Ein
anderer Fall tritt auf, wenn die Lösung annimmt, daß die Entfernung
zur Lichtquelle endlich, aber die Strahlungscharakteristik isotrop
ist. Das Licht strahlt folglich in alle Richtungen mit der gleichen
Intensität. Die
Beschreibung der Lichtquelle reduziert sich in diesem Fall auf die
Position des Lichtes: Q = (Qx, Qx, Qz).
-
Der
Lichtvektor, also die Position des Lichtes relativ zur Position
des Eckpunktes (Px, Py, Pz) ist:
L = (Qx – Px, Qy – Py, Qz – Pz)mit
dem Betrag:
-
Da
der Betrag nicht gleich 1 sein kann, aber die Beleuchtungsstärkegleichungen
einen Einheitsvektor erfordern, wird der Lichtvektor normiert: L = ((Qx – Px)/|L|,
(Qy – Py)/|L|,
(Qz – Pz)/|L|).
-
Ein
dritter Fall tritt auf, wenn die Strahlungscharakteristik nicht
isotrop ist. Wenn die Strahlungscharakteristik nicht isotrop ist,
erfordert die Beschreibung der Lichtquelle den Vektor des Strahlungsdiagramms,
welcher die Strahlungscharakteristikfunktion beschreibt: K = (Kx, Ky, Kz).
-
Der
Strahlungscharakteristik-Vektor dient zur Beschreibung der Richtung,
in welcher die Lichtintensität ein
Maximum hat. Das das Objekt überstreichende
Licht nimmt dann ab, wenn der Winkel κ zwischen dem Lichtvektor L
und dem Strahlungscharakteristik-Vektor κ zunimmt (siehe
2). Vor dem Einbeziehen der Strahlungscharakteristikfunktion
ist der Lichtvektor wie zuvor:
L = ((Qx – Px)/|L|,
(Qy – Py)/|L|,
(Qz – Pz)/|L|)mit
dem Betrag:
-
Die
Strahlungscharakteristikfunktion, welche die Intensität als Funktion
vom Winkel zwischen dem Lichtvektor und dem Strahlungscharakteristik-Vektor
darstellt, ist oftmals: cos(κ) = Kx·Lx + Ky·Ly + Kz·Lz.
-
Unter
Aufnahme dieses Werts wird der Lichtvektor zu: L
= (cos(κ)·Lx, cos(κ)Ly, cos(κ)Lz).
-
Computergraphiksysteme
stellen gewöhnlich
gekrümmte
Oberflächen
von Bildern als ein Netzwerk von ebenen Polygonen dar, welche schattiert
sind, um ein weiches Erscheinungsbild wiederzugeben. Die Systeme
versuchen das weiche Erscheinungsbild durch Variieren der Intensität über die
Polygone wiederzugeben. Bekannte Techniken zum realistischen Schattieren
von Polygonen werden aufgrund ihres großen Rechenaufwands von Echtzeitsystemen
nicht benutzt. Die am einfachsten auszuführende Schattierungsberechnung
ist die Berechnung der diffusen Reflexion, welche dem Lambert'schen Gesetz für diffuses
Licht folgt. Jedoch nimmt diese Berechnung die gleiche Reflexionshelligkeit
aus allen Blickwinkeln an. Da die einfache diffuse Gleichung die
Reflexionsgleichungen nicht unter Beachtung der physikalischen Eigenschaften
der Oberfläche, beispielsweise
einem Rauheits-Koeffizienten, ausrechnet, nähert der Ausdruck die Reflexion
nur an. Der Ausdruck kann beispielsweise nicht beschreiben, wie
sich die Wellenlänge
in Abhängigkeit
vom Einfallswinkel verschieben kann, wenn das Licht eine metallische
Oberfläche überstreicht.
Diese Wellenlängenverschiebung
bewirkt eine Veränderung
der Farbe. Auch berücksichtigt
die einfache diffuse Gleichung nicht, wie das Licht von Oberfläche zu Oberfläche gestreut
wird.
-
Außerdem nimmt
die einfachste Version der diffusen Reflexion an, daß die Reflexion über die
gesamte Seitenfläche
oder das gesamte Polygon konstant ist. Obwohl dies einfach zu berechnen
ist, ist die Intensität oftmals
an den Grenzen zwischen den Polygonen diskontinuierlich. Eine verbesserte
Technik zur Ausführung des
Schattierens von Bildern in Echtzeit wird als Gouraud-Schattieren
bezeichnet. Bei der Gouraud-Schattierungstechnik wird die Intensität an jedem
Punkt durch lineare Interpolation der Intensitäten an den Eck- oder Scheitelpunkten
der Polygone berechnet. Diese Intensitäten werden durch Nutzung der
Reflexionsgleichung für
die diffuse Reflexion mit den an den Eckpunkten gegebenen Normalen
bestimmt. Weitere Informationen über
die Gouraud-Schattierung siehe: Gouraud, H. "Continuous Shading of Curved Surfaces", IEEE Transactions
on Computers, Bd. 20, Nr. 6, Seiten 623–628 (Juni 1971). Jedoch läßt sich
diese Technik nur für
diffuse Reflexionen anwenden, und somit erscheinen durch diese Technik
schattierte Oberflächen
matt. Außerdem können die
Bilder infolge von diskontinuierlichen Intensitätsänderungen an den Polygongrenzen
Mach-Bänder reflektieren.
-
Die
Phong-Schattierungstechnik erleuchtet die matten Oberflächen und
reduziert die Mach-Bänder, welche
die Gouraud-Schattierungstechnik
erzeugt, aber sie wird aufgrund der langen Rechenzeit und des für die Erzeugung
des Bildes erforderlichen Aufwandes gewöhnlich nicht in Echtzeitsystemen
benutzt. In dieser Technik wird die Intensität jedes Punktes durch Verwendung
einer angenäherten
Oberflächennormalen
bestimmt, welche aus den an den Eckpunkten beschriebenen tatsächlichen
Oberflächennormalen
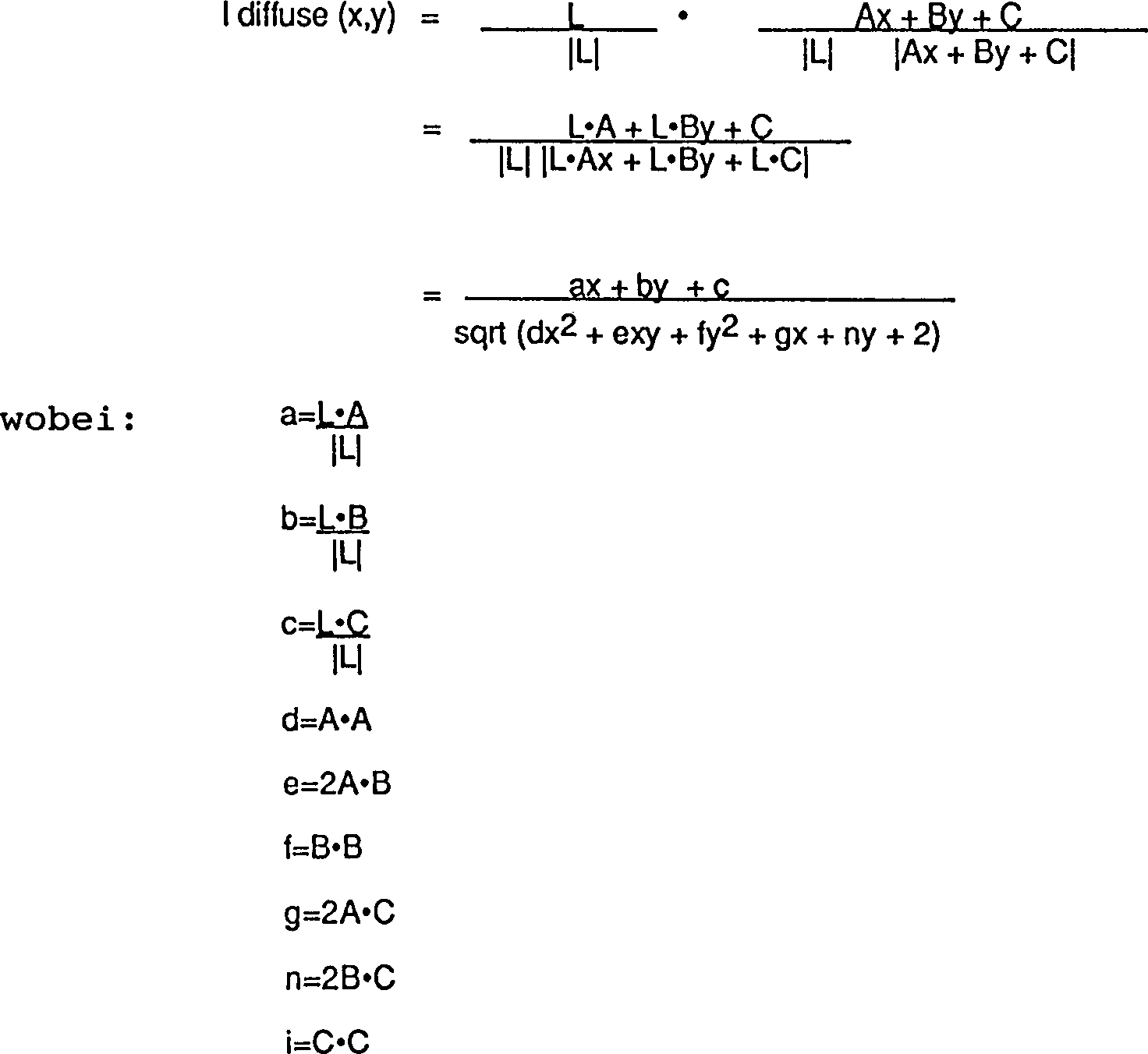
linear interpoliert wird. Das Phong-Schattieren nutzt die Gleichung
N(x,y) = Ax + By + C, wobei A, B und C die ausgewählten Eckpunkte
sind, um die Normale über
das Polygon zu interpolieren. Die Phong-Schattierungsgleichung erfordert
sieben Additionen, sechs Multiplikationen, eine Division und eine
Quadratwurzel pro Pixel. Diese Operation ist sehr aufwendig und
zeitintensiv, insbesondere weil sie die Berechnung der Quadratwurzel
einschließt. Zu
weiteren Informationen über
das Phong-Schattieren
siehe: Phong B.T. "Illumination
for Computer Generated Images",
PhD Dissertation, Dept. of Computer Science, University of Utah,
Salt Lake City, Gov. Ordering No. AD-A0008- 786.
-
Die
Berechnung der Phong-Schattierung wurde durch Tom Duff vereinfacht
(beschrieben in "Smoothly Shaded
Renderings of Polyhedral Objects on Raster Displays", ACM Computer Graphics,
Bd. 13, Nr. 2, Seiten 270–275,
1979). Duff vereinfachte das Phong-Schattieren durch Kombination
der Interpolation der Reflexionsgleichungen:
-
Somit
kann diese Implementierung für
aufeinanderfolgende Werte von x und y ausgewertet werden mit nur
drei Additionen, einer Division und einer Quadratwurzel pro Pixel.
Obwohl dies eine Verbesserung gegenüber Phong's Formel ist, machen die Berechnungen
der Division und Quadratwurzel die Technik noch zu zeitintensiv
und aufwendig für
Echtzeitrealisierungen.
-
In
einer anderen Implementierung des Phong-Schattierens wird eine Näherung der
Reflexionsgleichung berechnet, wobei Zeit und Aufwand gegenüber der
exakten Berechnung der Reflexionsgleichung gespart werden. In Weimer "Fast Phong Shading", Computer Graphics,
Bd. 20, Nr. 4, (1986), Seiten 103–105 wird eine Taylor-Reihen-Näherung zweiter
Ordnung benutzt, um die Reflexion zu berechnen. Um die Näherung zu
vereinfachen, wird das Polygon so verschoben, daß der Koordinatennullpunkt
im Zentrum des Polygons liegt. Mit Hilfe dieser Technik kann die
Intensität
an einem Pixel durch nur zwei Additionen pro Pixel bewertet werden.
-
Jedoch
werden in allen o.g. Techniken die gleichen Funktionen benutzt,
um die Reflexion aller Polygone eines Bildes zu bestimmen. Aus Bergman,
L. et al. "Image
Rendering by Adaptive Refinement",
Computer Graphics, Vol 20. No. 4, August 1986 ist ein Verfahrung
zur Schattierung bekannt, bei dem an einigen der Polygone in Abfolge
wiederholt zunehmend komplexe Schattierungsverfahren ausgeführt werden.
Zunächst werden
bei dem bekannten Verfahren alle Polygone mit einem Schattierungsverfahren
geringen Komplexität schattiert.
-
Die
DE 38 25 539 A1 offenbart
ein Verfahren und eine Einrichtung zum Schattieren von Bildern durch Wiedergabe
einer Serie benachbarter Pixelkurven derart, daß keine Lücken zwischen den wiedergegebenen Kurven
entstehen.
-
Wenn
die Reflexion für
einige der Polygone des Bildes nur dann mit der gewünschten
Qualität
bestimmt werden kann, wenn ein komplexer zeitintensiver Prozeß benutzt
wird, so werden alle Polygone unter Verwendung desselben Prozesses
bearbeitet. Somit wird, um ein Qualitätsbild wiederzugeben, ein komplexer zeitintensiver
Prozeß benutzt,
obwohl die Reflexion für
eine bedeutende Anzahl von Polygonen durch einen einfacheren, schnelleren
Prozeß bestimmt
werden könnte.
-
Aufgabe
der vorliegenden Erfindung ist es, eine Einrichtung und ein Verfahren
zur Erzeugung von schattierten Abbildungen zu schaffen, die bzw.
das den Aufwand an Rechnerressourcen und Zeit derart reduziert,
daß schattierte
Bilder in Echtzeit zur Verfügung
gestellt werden können.
-
Die
Aufgabe wird erfindungsgemäß gelöst durch
eine Einrichtung mit den Merkmalen des Patentanspruchs 1 und ein
Verfahren mit den Merkmalen des Patentanspruchs 52.
-
Die
Erfindung verwendet ein adaptives Schattierungsverfahren, um schattierte
Bilder in Echtzeit zu erzeugen. Zuerst wird die Farbe oder die Intensität an jeder
der Ecken des Polygons berechnet. Dann wird eine Folge von Tests
ausgeführt,
um die Ordnung der Gleichung zu bestimmen, welche benutzt werden
soll, um die Farbe oder die Intensität über das Polygon zwischen den
Eckpunkten zu interpolieren. Gemäß dieser
Technik wird bei Po lygonen, die eine leichte oder keine Krümmung haben,
und bei einer unendlich entfernten Lichtquelle (dies ist die einfachste
Form des Schattierens) eine extrem schnelle Gleichung niederer Ordnung
benutzt, um über
das Polygon zu interpolieren. Bei Polygonen, die einen hohen Grad
der Krümmung
und/oder der Positionsveränderung
der Lichtquelle aufweisen, wird ggf. eine Gleichung höherer Ordnung
benutzt, welche zusätzliche
Rechenzeit erfordert, aber wünschenswerte
Schattierungsergebnisse erzeugt.
-
Im
folgenden wird die Erfindung anhand von in der Zeichnung dargestellten
Ausführungsbeispielen
näher erläutert. In
der Zeichnung zeigen:
-
1a die in der Berechnung
der diffusen Reflexion benutzte Geometrie;
-
1b die in der Berechnung
der spiegelnden Reflexion benutzte Geometrie;
-
2 die Geometrie, die bei
Lichtquellen mit anisotroper Strahlungscharakteristik benutzt wird;
-
3 ein im System der vorliegenden
Erfindung benutztes Computersystem;
-
4a, 4b und 4c die
Ausleuchtung der Oberflächen,
welche zur Erzeugung qualitativ guter schattierter Bilder Gleichungen
höherer
Ordnung erfordert;
-
5 ein Ablaufdiagramm, welches
ein bevorzugtes Ausführungsbeispiel
der Erfindung darstellt;
-
6a und 6b Ablaufdiagramme, welche andere bevorzugte
Ausführungsbeispiele
der vorliegenden Erfindung darstellen;
-
7a bis 7d die Terminologie und die Variablen,
die in einem bevorzugten Ausführungsbeispiel
der Erfindung benutzt werden;
-
8a, 8b und 8c eine
weitere Darstellung der Terminologie und Variablen eines bevorzugten
Ausführungsbeispiels;
-
9 eine Tabelle, welche die
Qualität
von den gemäß dem System
der Erfindung erzeugten Bildern mit gemäß dem Phong-Schattierungsverfahren
erzeugten Bildern vergleicht;
-
10a bis 10e die Terminologie und Variablen, die
bei Nutzung von Gleichungen zweiter und dritter Ordnung im System
der Erfindung benutzt werden; und
-
11a und 11b die Terminologie und Variablen, die
bei Nutzung der ebenen Gleichungen im System der Erfindung benutzt
werden.
-
Generelle
Systemkonfiguration
-
3 zeigt ein typisches System
auf Computerbasis zur anpassungsfähigen Bild-Schattierung von Polygonen
gemäß der Erfindung.
Gezeigt ist ein Computer 101 mit drei Hauptkomponenten.
Die erste dieser Hauptkomponenten ist die Ein/Ausgabe-Schaltung 102,
die zur Informationsübertragung
in geeignet strukturierter Form zu und aus den anderen Teilen des
Computers 101 verwendet wird. Ebenfalls als Teil des Computers 101 sind
die Zentraleinheit (CPU) 103 und der Speicher 104 gezeigt.
Die beiden zuletzt genannten Komponenten sind diejenigen, die typischerweise
bei den meisten Universalcomputern und beinahe allen Spezialcomputern
vorhanden sind. Tatsächlich
sind einige der im Computer 101 vorhandenen Elemente repräsentativ für diese
breite Kategorie von Datenverarbeitungsmaschinen. Einzelne Beispiele
für geeignete
Datenverarbeitungsmaschinen, welche die Rollen des Computers 101 erfüllen können, sind
die von der Firma Sun Microsystems, Inc., Mountain View, Kalifornien
hergestellten Maschinen. Andere Computer mit ähnlichen Eigenschaften sind
natürlich
ebenfalls geeignet, die weiter unten beschriebenen Funktionen in
direktem Ablauf durchzuführen.
-
Ebenfalls
in 1 ist ein Eingabegerät 105 in
einer Ausführungsform
als Tastatur gezeigt. Es ist jedoch klar, daß als Eingabegerät auch ein
Kartenleser, ein Magnet- oder Papierbandleser oder andere bekannte
Eingabegeräte
(ebenso wie ein anderer Computer) vorgesehen sein können. Ein
Massenspeicher 106 ist mit der Ein/Ausgabeschaltung 102 gekoppelt
und liefert zusätzliche
Speicherkapazität
für den
Computer 101. Der Massenspeicher kann andere Programme
u.dgl. enthalten und die Form eines Magnet- oder Papierbandlesers
oder eines anderen bekannten Geräts
annehmen. Es ist klar, daß die
im Massenspeicher 106 enthaltenen Daten in geeigneten Fällen auch
in herkömmlicher
Weise in den Computer 101 als Teil des Speichers 104 einbezogen
werden können.
-
Zusätzlich ist
ein Displaymonitor 107 dargestellt, der zur Anzeige von
Nachrichten oder anderen Benutzerkommunikationen ebenso wie graphischen
Bildern, d.h. schattierten Bildern, die gemäß dem Verfahren der Erfindung
wiedergegeben werden, verwendet werden kann. Der Displaymonitor
enthält
eine Matrix von Anzeigeelementen, die als Pixel bezeichnet werden
und welche in einem speziellen Muster mit vorgegebenen Intensitäten aktiviert
oder eingeschaltet werden, um ein graphisches Bild auf dem Display
zu erzeugen. Wenn das Display ein Farbmonitor ist, werden für jedes
Grundfarbelement, d.h. das rote, das grüne und das blaue Element, die
Pixel in einem speziellen Muster mit einer vorgegebenen Intensität aktiviert.
Der Betrachter des angezeigten Bildes kombiniert visuell die roten,
grünen
und blauen Elemente an jedem Pixel und nimmt ein Farbbild wahr.
Ein solcher Displaymonitor kann die Form eines üblichen Kathodenstrahlbildschirms
annehmen. Die graphischen Bilddaten werden an den Bild-Pufferspeicher 108 geliefert.
Die I/O-Schaltung 102 liest die graphischen Bilddaten aus
dem Bild-Pufferspeicher 108 und aktiviert die entsprechenden
Pixel auf dem Displaymonitor 107 an der Stelle und mit
der Intensität,
die durch die graphischen Bilddaten spezifiziert sind. Ein Cursorsteuergerät 108 dient
zur Auswahl von Befehlsmoden und zum Editieren von Eingabedaten
und bildet generell ein zweckmäßiges Mittel
zur Informationseingabe in das System.
-
Prozeßbeschreibung
-
Bei
der Erfindung werden die zur Bestimmung des Schattie rungsgrades
auf einer Polygonoberfläche verwendeten
Schritte der Krümmung
des Polygons, der Position der Lichtquelle in bezug auf die Oberfläche des
Polygons und der Position des Beobachtungspunktes, d.h. der Position
des Auges des Betrachters in bezug auf die Oberfläche des
Polygons angepaßt.
Je größer die
Krümmung
des Polygons, je näher
die Lichtquelle dem Polygon und je näher der Beobachtungspunkt dem
Polygon ist, desto größer ist
die Änderung
der Reflexion über
die Polygonoberfläche
und desto mehr Schritte sind erforderlich, um den Schattierungsgrad über die
Polygonoberfläche
akurat zu bestimmen.
-
Diese
Beobachtung wird benutzt, um ein Qualitätsbilder wiedergebendes Verfahren
zu schaffen, und zwar ohne den Berechnungs-Mehraufwand zur Erzeugung
von Qualitätsbildern
bei durchgängiger
Nutzung von Schattierungsgleichungen hoher Ordnung. Eine Serie von
Tests wird zur Bestimmung des Grades der Krümmung, der Position der Lichtquelle
und der Position des Blickpunkts in bezug auf das Polygon ausgeführt. Wenn
der Grad der Krümmung
gering ist und die Entfernungen der Lichtquelle und des Blickpunkts
groß sind, so
wird eine einfache, schnelle Gleichung nullter Ordnung benutzt,
um die Reflexion über
den Polygon zu berechnen. Dies ist möglich, weil das Maß der Reflexion über das
Polygon konstant ist, wenn die Änderung
des Normalen-Vektors gering ist, was auf eine geringe Oberflächenkrümmung hinweist,
und wenn die Änderungen des
Lichtquellenvektors und des Blickpunktvektors gering sind. Wenn
die Änderung
des Maßes
der Reflexion gering ist, wenn die Reflexion beispielsweise weniger
als 1/250 variiert, so ist die Änderung
für den
Beobachter beinahe nicht wahrnehmbar, und wenn die Reflexion weniger
als 1/64 variiert, so ist die Änderung
noch sehr fein. So ist es möglich,
die Farbänderung
mit einem konstanten Farbwert anzunähern.
-
Wenn
das Maß der
Reflexionsänderung über das
Polygon wächst,
wird eine Gleichung höherer
Ordnung zur Berechnung der Reflexion über das Polygon benutzt. Dies
erzeugt eine genauere Wiedergabe der Reflexion, welche mit einer
Gleichung nullter Ordnung nicht erreicht werden kann. Wenn das Maß der Krümmung größer wird
und/oder die Lichtquelle näherkommt,
so daß sich
der Richtungsvektor von den Eckpunkten des Polygons zur Lichtquelle
von Eckpunkt zu Eckpunkt ändert,
so wird eine Gleichung höherer
Ordnung benutzt. Weil das Maß der
Reflexion sich über
die Oberfläche
des Polygons signifikant ändert,
so daß sie
für den Beobachter
wahrnehmbar ist und somit der Grad des Schattierens über das
Polygon nicht konstant ist, muß eine
rechenzeitintensive Gleichung höherer
Ordnung benutzt werden, um ein Qualitätsbild wiederzugeben.
-
Die 4a, 4b und 4c stellen
drei Situationen dar, in denen Gleichungen nullter Ordnung und erster Ordnung
zur Bestimmung der Reflexion nicht adäquat sind. In 4a wird angenommen, daß die Oberflächenkrümmung über dem
Dreieck groß ist.
Somit variieren die Eckpunkt-Normalenvektoren N und die diffuse Reflexion,
welche proportional zur Projektion des Eckpunkt-Normalenvektors
auf den Eckpunkt-Lichtquellenvektor L ist. So ist es wünschenswert,
eine Gleichung mit einer Ordnung auszuwählen, die diese Reflexionsänderung
berücksichtigt.
In diesem Beispiel würde
die Gleichung erster Ordnung nicht adäquat sein, und das System würde die
Gleichung der nächsthöheren Ordnung
(Phong) auswählen,
um die Reflexion zu simulieren. Es sollte angemerkt werden, daß die Phong-Gleichung
strenggenommen keine Gleichung zweiter Ordnung ist. Die Methode
schließt
eine Normierung ein, welche eine Quadratwurzel und eine Division
an jedem Pixel erfordert. In der Literatur wird jedoch angegeben,
daß Gleichungen
zweiter Ordnung diese Lösung
annähern
(siehe Weimer, "Fast
Phong Shading",
Computer Graphics, Bd. 20, Nr. 4 (1986) Seiten 103–105). Soweit
nicht anders angegeben, wird die Phong-Gleichung in der Beschreibung
als eine Gleichung zweiter Ordnung bezeichnet.
-
Es
wird angenommen, daß das
Dreieck, welches in 4b dargestellt
ist, keine Krümmung
hat, d.h., daß die
Eckpunkt- Normalenvektoren
identisch sind, aber daß die
Lichtquelle unmittelbar über
der Dreiecksoberfläche
positioniert ist. Folglich variieren die Eckpunkt-Lichtquellenvektoren
und die diffuse Reflexion, welche proportional zur Projektion der
Eckpunkt-Normalenvektoren auf die Eckpunkt-Lichtquellenvektoren
ist. Eine diese Änderung
enthaltene Gleichungsordnung würde
dann ausgewählt
werden.
-
In 4c wird angenommen, daß das Dreieck
keine Krümmung
hat, aber die Blickpunktposition unmittelbar über der Dreiecksoberfläche ist.
Somit variieren die Eckpunkt-Blickpunktvektoren und die spiegelnde Reflexion,
welche die Projektion der Eckpunkt-Normalenvektoren auf die Eckpunkt-Blickpunktvektoren
enthält. Das
System der Erfindung würde
diese Situation erkennen und eine Gleichungsordnung auswählen, welche die
Reflexionsänderung
enthält.
-
Somit
balanciert das System die Vorteile der schnellen, billigen Berechnungen
mit Bildern geringerer Qualität
und der langsamen, teureren Berechnungen mit Bildern hoher Qualität aus. Schnelle,
billige Berechnungen werden vorzugsweise benutzt, um das Maß der Reflexion
auf einem Polygon zu bestimmen; wenn jedoch die Krümmung des
Polygons, die Position der Lichtquelle oder die Position des Blickpunkts
eine signifikante Reflexionsänderung über die
Oberfläche
anzeigen, so wird eine Gleichung höherer Ordnung benutzt, um ein
Qualitätsbild
wiederzugeben. Somit werden die langsameren, kostenintensiveren
Berechnungen höherer
Ordnung nur soweit nötig
ausgeführt.
Die Polygone mit geringer Krümmung,
großen
Entfernungen zur Lichtquelle und großen Entfernungen zum Blickpunkt
werden unter Nutzung von Gleichungen niedrigerer Ordnung schnell
und unaufwendig berechnet. Es wurde gefunden, daß ein wesentlicher Teil der
ein Bild bildenden Polygone durch Nutzung einer Gleichung nullter
oder erster Ordnung wiedergegeben werden kann. Bilder, die mit Hilfe
des anpassungsfähigen
Schattierungssystems der Erfindung wiedergegeben werden, werden
mit geringer oder nicht wahr nehmbarer Verringerung der Bildqualität 20 bis
50 % schneller erzeugt, als durch Gleichungen hoher Ordnung wiedergegebene
Bilder.
-
Im
bevorzugten Ausführungsbeispiel
können
drei Typen von Gleichungen benutzt werden, um das Maß der Reflexion über ein
Polygon zu berechnen: Gleichungen nullter Ordnung, erster Ordnung
und zweiter Ordnung. Die Gleichung nullter Ordnung berechnet einen
konstanten Wert für
die gesamte Polygonoberfläche. Vorzugsweise
folgt die Gleichung nullter Ordnung dem Lambert'schen Gesetz und berechnet das Gewicht
der diffusen Reflexion gemäß der Gleichung: cos(α)
= N·L,wobei
N die Oberflächennormale
und L der Lichtquellenvektor ist. Die Normale kann eine Eckpunktnormale oder
eine Normale an einem beliebigen Punkt auf der Oberfläche sein.
Vorzugsweise ist die Normale die gemittelte Normale der Eckpunktnormalen.
-
Eine
Gleichung erster Ordnung wird vorzugsweise gemäß der Gouraud-Schattierungsmethode
berechnet. Die Gouraud-Methode erzeugt ein Bild von adäquater Qualität, wenn
die Änderung
der Reflexion über die
Polygonoberfläche
gering ist. Wenn die Änderung
der Reflexion über
die Polygonoberfläche
signifikant ist, was auf die Notwendigkeit der Verwendung einer
Gleichung zweiter Ordnung, hinweist, wird vorzugsweise die Phong-Schattierungsmethode
benutzt.
-
Im
folgenden wird das Verfahren der Erfindung anhand der 5, 6a und 6b beschrieben. 5 stellt den Ablauf des
Verfahrens in bezug auf ein erstes Ausführungsbeispiel der Erfindung
dar, und die 6a und 6b stellen den Ablauf des
Verfahrens in bezug auf ein anderes Ausführungsbeispiel der Erfindung
dar. Die bevorzugten Ausführungsbeispiele
werden anhand von Bildwiedergaben beschrieben, die die Abtastzeilen-Technik
(scan line technique) benutzen. Für den Fachmann ist es jedoch
offensichtlich, daß die
Erfindung nicht nur bei der Abtastzeilen-Technik, sondern auch bei
anderen Techniken, wie beispiels weise Ebenengleichungen, angewendet
werden kann, um die Farbe an den Polygoneckpunkten oder andere Randbedingungen über das Polygon
zu interpolieren.
-
Wenn
die Abtastzeilen-Technik benutzt wird, werden die Displayelemente,
die das Polygon für
jede Abtastzeile bzw. -linie schneidet, bestimmt und die Farbe jedes
dieser Displayelemente aus den Eckpunkt-Attributen (Farbe, Position
und Normale) abgeleitet, wobei bekannte Schattierungsgleichungen,
wie beispielsweise die oben beschriebenen Gleichungen nullter, erster
oder zweiter Ordnung, benutzt werden. Um die Eckpunkt-Attribute
(oder andere Randbedingungen) über
die Displayelemente, die das Polygon schneidet, zu interpolieren,
werden Differenzvariable bestimmt. Die Differenzvariablen bestimmen,
wie die Eckpunkt-Attribute (Tiefe,
Normale, Farbe) entlang der Polygonkanten und über die Abtastlinie zwischen
den Polygonkanten zu inkrementieren sind. Wie unten dargestellt,
wird in den meisten Fällen
die Normalendifferenzvariable (ebenso wie die der Farbe und der
Position) bestimmt. Wenn jedoch die hier beschriebenen Testkriterien
anzeigen, daß der
Lichtvektor und/oder der Blickpunktvektor variieren, so werden die
Differenzvariablen für
diese Vektoren in der gleichen Weise wie für die Normalendifferenzvariable
bestimmt und die Attribute über
das Polygon interpoliert.
-
Bezugnehmend
auf die
7a und
7b werden zuerst die Differenzvariablen
für die
Position, die Normale und die Farbe wie folgt bestimmt.


wobei
dPx(1), dPy(1), dPz(1) die Positionsdifferenzvariablen für die Kante
zwischen dem ersten und dem zweiten Eckpunkt, dPx(2), dPy(2), dPz(2)
die Positionsdifferenzvariablen für die Kante zwischen dem ersten
und dem dritten Eckpunkt und dPx(3), dPy(3), dPz(3) die Positionsdifferenzvariablen
für die
Kante zwischen dem dritten und dem ersten Eckpunkt sind. Die Variablen
dNx(1), dNy(1), dNz(1) stellen die Normalendifferenzvariablen für die Normalen
am ersten und am zweiten Eckpunkt, dNx(2), dNy(2), dNz(2) die Normalendifferenzvariablen
für die
Normalen am zweiten und am dritten Eckpunkt und dNx(3), dNy(3),
dNz(3) die Normalendifferenzvariablen für die Normalen am dritten und
am ersten Eckpunkt dar. Die Variablen dCr(1), dCg(1), dCb(1) stellen
die Farbdifferenzvariablen entlang der Kante zwischen der ersten
und dem zweiten Eckpunkt, dCr(2), dCg(2) und dCb(2) die Farbdifferenzvariablen
entlang der Kante zwischen dem zweiten und dem dritten Eckpunkt
und dCr(3), dCg(3) und dCb(3) die Farbdifferenzvariablen entlang
der Kante zwischen dem dritten und dem ersten Eckpunkt dar.
-
Aus
dem Betrag der Positionsdifferenzvariablen (dPx gegenüber dPy)
kann die Hauptachse bestimmt werden. Die Hauptachse zeigt die Richtung
an, in welcher die Kanten des Polygons wiedergegeben werden. In
der vorliegenden Darstellung ist die Y-Achse die Hauptachse für die erste
Kante und für
die zweite Kante und die X-Achse die Hauptachse für die dritte
Kante. Die Positionsdifferenzvariable für die Nebenachse wird durch
die Positionsdifferenzvariable der Hauptachse dividiert, um das
Inkrement für
die Nebenachse abzuleiten. Es werden dann Einheitsschritte benutzt,
um die Dreieckskanten entsprechend der Abtastlinien-Wiedergabetechnik
zu durchlaufen. Die Eckpunkte wer den dann sortiert, um eine linke
Kante und eine rechte Kante jeder Abtastlinie zu bestimmen.
-
Entsprechend
der Logik der Abtastlinien-Technik werden die in den Abtastlinien-Gleichungen
benutzten Variablen, die die Kanten zwischen den Eckpunkten beschreiben,
auf die Eckpunkt-Attribute
als Anfangswerte eingestellt, und aus den Differenzvariablen abgeleitete
Schrittweitevariablen werden benutzt, um das Polygon zu durchlaufen.
Die Positionsdifferenzvariablen ergeben nach der Division durch
die Hauptachse normierte Positionsinkremente, die Normalendifferenzvariablen
nach der Division durch die Hauptachse normierte Normaleninkremente
und die Farbdifferenzvariablen nach Division durch die Hauptachse
normierte Farbinkremente:
-
Die
Inkrementwerte werden dann benutzt, um mit Hilfe einer Kanteninterpolationslogik
die Eckpunkt-Attribute entlang der Dreieckskanten zu interpolieren:
-
Um
das Polygon zu durchlaufen, werden die Eckpunkt-Attribute interpoliert,
um Werte an der linken Seite und der rechten Seite der Abtastzeile
zu erzeugen (siehe
7c).
Um die Abtastzeile bzw. -linie auszufüllen, werden zuerst die Differenzvariablen
für die
Abtastlinie bestimmt. Die Differenzvariablen für die Abtastlinie gemäß
7d sind:
-
Die
Variablen werden dann durch die Breite der Abtastlinie, d.h. dPx(y),
dividiert, um die Variablen zu normieren und einheitliche Schrittvariablen
für die
Abtastlinie zu erzeugen (vorzugsweise angepaßt an die einheitlichen Inkremente
des Rasters):
-
Mit
dieser Information werden dann die Eckpunkt-Attribute über das
Dreieck interpoliert, um das Dreieck auszufüllen:
-
Die
Lösung
erster Ordnung der Reflexionsgleichung vereinfacht den Wiedergabeprozeß. Anders
als bei Lösungen
höherer
Ordnung entfernt die Lösung
erster Ordnung die Notwendigkeit, die Differenzgleichungen für den Normalenvektor
zu bestimmen. Stattdessen werden die Gewichte der diffusen Reflexion
an den Eckpunkten (1, 2, 3) bestimmt: cos(α1): = Lx(1)·Nx(1)
+ Ly(1)·Ny(1)
+ Lz(1)·Nz(1) cos(α2):
= Lx(2)·Nx(2)
+ Ly(2)·Ny(2)
+ Lz(2)·Nz(2) cos(α3):
= Lx(3)·Nx(3)
+ Ly(3)·Ny(3)
+ Lz(3)·Nz(3)
-
Die
diffusen Gewichte werden dann in jedes der Eckpunkt-Farbattribute
aufgenommen. Cr(1) = (Kar +
Kdr·cos(α1))·Cr(1) Cg(1) = (Kag + Kdg·cos(α1))·Cg(1) Cb(1) = (Kab + Kdb·cos(α1))·Cb(1) Cr(2) = (Kar + Kdr·cos(α2))·Cr(2) Cg(2) = (Kag + Kdg·cos(α2))·Cg(2) Cb(2) = (Kab + Kdb·cos(α2))·Cb(2) Cr(3) = (Kar + Kdr·cos(α3))·Cr(3) Cg(3) = (Kag + Kdg·cos(α3))·Cg(3) Cb(3) = (Kab + Kdb·cos(α3))·Cb(3)
-
Es
sollte angemerkt werden, daß die
o.g. Gleichungen die diffuse Reflexion für eine Lichtquelle beschreiben.
Gibt es mehrere Lichtquellen, so summiert die Lösung die diffusen Reflexionen,
da die Beiträge
additiv sind.
-
In
der Lösung
erster Ordnung werden die Positionsdifferenzvariablen und die Farbdifferenzvariablen wie
oben dargelegt be stimmt. Es gibt keine Notwendigkeit die Normalendifferenzvariablen
zu bestimmen. Die Eckpunktfarbwerte begründen die diffusen Gewichtswerte.
Ein Problem, welches mit dieser Lösung entsteht, ist jedoch,
daß die
diffusen Gewichte unterschätzt
werden können.
Eine Lösung
zweiter Ordnung korrigiert dies durch Nutzung der Normalendifferenzvariablen.
Wie oben beschrieben werden die Normalenvektoren an den Eckpunkten
zuerst entlang der Polygonkante interpoliert und dann auf ihren
Betrag normiert. Der Normalenvektor wird dann entlang der Abtastlinie
des Polygons zwischen der linken und der rechten Polygonkante inkrementiert
und ist an jedem Displayelement normiert.
-
Dieser
Normalenvektor wird dann benutzt, um das diffuse Gewicht an jedem
Displayelement zu berechnen: cos(α(x,y)): =
Lx(x,y)·Nx(x,y)
+ Ly(x,y)·Ny(x,y)
+ Lz(x,y)·Nz(x.y)und
das diffuse Gewicht wird in den Farbwert aufgenommen: Cr(x,y):
= (Kar + Kdr·cos(α(x,y)))Cr(x,y) Cg(x,y): = (Kag + Kdg·cos(α(x,y)))·Cg(x,y) Cb(x,y): = (Kab + Kdb·cos(α(x,y)))·Cb(x,y)
-
Die
o.g. Gleichungen nehmen an, daß der
Lichtvektor L(x,y) sich über
das Polygon nicht ändert.
Wenn sich der Lichtvektor tatsächlich ändert, so
muß der
Lichtvektor ebenso wie der Normalenvektor interpoliert und normiert
werden. Die zusätzlichen
Interpolationen und Normierungen sind zeitraubend und aufwendig.
Das System der vorliegenden Erfindung vereinfacht die Reflexionsgleichung
in dreierlei Hinsicht. Erstens bestimmt das System der Erfindung,
wann Lösungen
nullter, erster oder zweiter Ordnung anzuwenden sind, so daß die aufwendigen
Lösungen
hoher Ordnung nur dann benutzt werden, wenn es die Normalenvektoränderung, Lichtvektoränderung
oder Blickpunktvektoränderung
aktuell erfordern. Zweitens kann das System der Erfindung wahlweise
erkennen, welche speziellen Vektorwerte eine Interpolation erfordern,
indem es bestimmt, welche Vektoren sich signi fikant über das
Polygon ändern,
und somit die zeitraubende Interpolation der drei Vektorwerte (einschließlich jener,
die keine Interpolation erfordern) vermeiden. Zusätzlich kann
das System der Erfindung wahlweise gewöhnliche Differenzengleichungen
einsetzen, um die Farbwerte zu interpolieren. Diese Option vermeidet
die aufwendigere klassische Lösung,
welche die drei Vektoren interpoliert und normiert.
-
Bezugnehmend
auf 5 wird im folgenden
das Verfahren der Erfindung erläutert.
Am Block 200 wird die Krümmung über die Oberfläche bestimmt.
Sie wird in bezug auf die Normalen an jedem Eckpunkt des Polygons
und entsprechend dem von den Normalen bestimmten Grad der Krümmung bestimmt,
indem die Krümmungsgrade
zwischen Paaren von Eckpunkten verglichen werden, um festzustellen,
ob die Krümmung über dem
Polygon stark ist. Vorzugsweise werden die folgenden Gleichungen
benutzt (siehe 8a): cos(ϕ) = min(cos(ϕ1)), cos(ϕ(2)),
cos(ϕ(3)))wobei cos(ϕ(1))
= Nx(1)·Nx(2)
+ Ny(1)·Ny(2)
+ Nz(1)·Nz(2) cos(ϕ(2)) = Nx(2)·Nx(3) + Ny(2)·Ny(3)
+ Nz(2)·Nz(3) cos(ϕ(3)) = Nx(3)·Nx(1) + Ny(3)·Ny(1)
+ Nz(3)·Nz(1)
-
Der
cos(ϕ)-Wert ist ein Maß für die maximale
Abweichung zwischen den Eckpunkt-Normalenvektoren. Er sagt die maximale
Krümmung
des Polygons voraus. Wenn am Block 205 der cos(ϕ)-Wert
eine starke Krümmung
anzeigt, so wird am Block 210 eine Schattierungsgleichung
zweiter Ordnung implementiert, anderenfalls wird der cos(ϕ)-Wert
gespeichert, um nachfolgend im Verfahren verwendet zu werden.
-
Ein
vorgegebener Grenzwert wird benutzt, um den Wert von cos(ϕ)
zu bestimmen, welcher eine starke Krümmung anzeigt. Der Grenzwert
wird vorzugsweise empirisch bestimmt. Der Grenzwert korrespondiert
mit der minimalen Krümmung,
bei welcher ein Qualitätsbild
nur bei Nutzung einer Gleichung zweiter (oder höhe rer) Ordnung erzeugt werden
kann. Die Kriterien der Qualität
hängen
von der Anwendung ab. Wenn beispielsweise cos(α) ungefähr gleich Eins ist, was darauf
hinweist, daß L
und N parallel sind, und wenn die Kriterien eine Genauigkeit von
8 Bit für
den Farb-Term vorsehen, so ergeben sich die Grenzwerte für die Auswahl
der Gleichungen nullter, erster und zweiter Ordnung wie folgt:
1,000 < cos(ϕ) < 0,996: nullte Ordnung,
0,996 < cos(ϕ) < 0,992: erste Ordnung,
0,992 < cos(ϕ) < 0: zweite Ordnung.
-
Vorzugsweise
ist der Grenzwert durch den Benutzer modifi zierbar, um das Verfahren
den Kundenwünschen
für jede
benutzte Anwendung und jedes erzeugte Bild anzupassen. Wenn typischerweise
cos(ϕ) annähernd
den Wert Eins hat, so ist die Krümmung über das
Polygon gering und der Verfahrensablauf wird mit dem Block 220 fortgesetzt.
Wenn die Krümmung
stark ist und anzeigt, daß eine
schnelle Schattierungsgleichung geringer Ordnung nicht die gewünschte Qualität im Bild
liefern würde,
so wird ein präziseres,
aber zeitraubendes und teures Schattierungsverfahren hoher Ordnung
benutzt. Wenn natürlich
der Benutzer ein schnell erzeugtes Bild fordert und keine Anforderungen
an die Qualität
stellt, so kann der Grenzwert auf einen niedrigeren Wert gesetzt
werden, um einen größeren Prozentsatz
der Polygone des Bildes mit einer Gleichung nullter Ordnung zu erzeugen.
Wenn beispielsweise die Kriterien eine Einhaltung einer Genauigkeit
von 4 Bit für
den Farb-Term fordern, so ergeben sich die Grenzwerte für die Auswahl
der Gleichung nullter, erster und zweiter Ordnung wie folgt:
1,000 < cos((ϕ) < 0,938: nullte Ordnung
0,938 < cos(ϕ) < 0,879: erste Ordnung
0,879 < cos(ϕ) < 0: zweite Ordnung.
-
In ähnlicher
Weise kann, wenn der Benutzer ein präzise schattiertes Bild fordert,
der Grenzwert auf einen Wert, der näher an Eins liegt, gesetzt
werden, um einen größeren Prozent satz
der Polygone mit einer Schattierungsgleichung höherer Ord nung wiederzugeben.
Wenn die Krümmung
nicht stark ist, wird im Block 220 die Positionsänderung
der Lichtquelle in bezug auf die Eckpunkte bestimmt.
-
Die
Richtung des Lichts wird sich relativ zu einem Eckpunkt um so mehr ändern, je
näher die
Lichtquelle dem Polygon ist. Bei einer im Unendlichen liegenden
Lichtquelle, ist die Lichtquellenrichtung für alle Eckpunkte die gleiche.
Bei einer in endlicher Entfernung angeordneten Lichtquelle, wie
sie in 8b dargestellt
ist, wird die Änderung
der Lichtquellenanordnung zwischen den Eckpunkten wie folgt bestimmt: cos(ψ)
= min(cos(ψ(1)),
cos(ψ(2)),
cos(ψ(3)))wobei cos(ψ(1))
= Lx(1)·Lx(2)
+ Ly(1)·Ly(2)
+ Lz(1)·Lz(2) cos(ψ(2))
= Lx(2)·Lx(3)
+ Ly(2)·Ly(3)
+ Lz(2)·Lz(3) cos(ψ(3))
= Lx(3)·Lx(1)
+ Ly(3)·Ly(1)
+ Lz(3)·Lz(1)wobei
Lx, Ly, Lz die Positionen der Lichtquelle in bezug auf den Eckpunkt
darstellen.
-
Der
cos(ψ)-Wert
ist ein Maß für die Abweichung
zwischen den Eckpunkt-Lichtvektoren. Wenn der Lichtquellentyp eine
unendliche Lichtquelle ist, so hat der cos(ψ)-Wert definitionsgemäß einen
Wert von Eins. Wenn am Block 225 gefunden wird, daß die Änderung
stark ist, so wird eine Schattierungsgleichung zweiter Ordnung implementiert
(Block 230).
-
Wenn
die Reflexionsgleichungen spiegelnde Reflexion enthal ten (Block 240),
so werden die Eckpunkt-Blickpunktvektoren (siehe 8c), d.h. die Blickpunktpositionen relativ
zu den Eckpunktpositionen, am Block 250 berechnet: cos(η)
= min(cos(η(1)),
cos(η(2)),
cos(η(3)))wobei cos(η(1))
= Lx(1)·Lx(2)
+ Ly(1)·Ly(2)
+ Lz(1)·Lz(2) cos(η(2))
= Lx(2)·Lx(3)
+ Ly(2)·Ly(3)
+ Lz(2)·Lz(3) cos(η(3))
= Lx(3)·Lx(1)
+ Ly(3)·Ly(1)
+ Lz(3)·Lz(1).
-
Die
spiegelnde Schattierung enthält
die Menge des Glanz lichts einer Oberfläche. Das Glanzlicht (highlight)
entspricht direkt der Anordnung der Lichtquelle in bezug auf die
Oberfläche
und der Anordnung des Auges in bezug auf die Lichtquelle auf der
Oberfläche.
Wenn die Reflexionsgleichungen nicht die spiegelnde Schattierung
umfassen sollen, so wird am Block 245 der cos(η) auf Eins
gesetzt, was anzeigt, daß es
keine Änderung
des Blickpunktvektors gibt.
-
Am
Block 260 wird dann die maximale Intensitätsänderung
als eine Funktion der Normalenvektoränderung, der Lichtvektoränderung
und der Blickpunktvektoränderung
bestimmt. Die unten angegebene Funktion wählt beispielsweise den Minimalwert
der drei Kosinusmeßwerte
aus, wobei die maximale Winkeländerung ausgewählt wird: cos(ϕψη) = min(a(ϕ)·cos(ϕ),
a(ψ)·cos(ψ), a(η)·cos(η))
-
Die
Gewichte a(ϕ), a(ψ),
a(η) geben
wieder, wie die drei Kosinuswerte die komplette Reflexionsgleichung
beeinflussen. Beispielsweise kann eine geringe Änderung in dem cos(η)-Wert in
eine große Änderung in
der Reflexionsintensität,
welche das Auge erreicht, umgesetzt werden. Somit werden die Gewichte
benutzt, um die Werte auszubalancieren, so daß eine akkurate Bestimmung
der maximalen Änderung
ausgeführt
werden kann.
-
An
den Blöcken 270 und 280 werden
durch Vergleichen der maximalen Intensitätsänderung mit Grenzwerten Tests
ausgeführt,
um zu bestimmen, ob eine Schattierungsgleichung erster oder zweiter
Ordnung benutzt werden sollte, um das Schattieren des Polygons zu
berechnen. Ein erster und zweiter Grenzwert können empirisch bestimmt oder
durch den Benutzer für
jede Anwendung entsprechend der gewünschten Qualität des Bildes
und der Zeit zur Erzeugung des Bildes eingestellt werden. Vorzugsweise
liegt der erste Grenzwert im Bereich von 0,996 bis 0,938 und der
zweite Grenzwert im Bereich von 0,992 bis 0,879. Beispielsweise
ergibt sich für
eine maximale Änderung
cos(ϕψη):
1 < cos(ϕψη) < ε1: nullte
Ordnung,
ε1 < cos(ϕψη) < ε2: erste
Ordnung,
ε2 < cos(ϕψη) < 0: zweite Ordnung.
-
Am
Block 270 wird die maximale Intensitätsänderung mit dem ersten Grenzwert ε1 verglichen.
Wenn die maximale Intensitätsänderung
größer als
der erste Grenzwert ist, so wird eine Gleichung nullter Ordnung benutzt
(Block 310). Wenn die Änderung
kleiner als oder gleich dem ersten Grenzwert ist, so wird am Block 280 die
maximale Änderung
mit dem zweiten Grenzwert ε2
verglichen. Wenn die maximale Intensitätsänderung kleiner als der zweite
Grenzwert ist, so wird die Schattierung unter Nutzung einer Gleichung
zweiter Ordnung erzeugt. Wenn nicht, so wird am Block 290 die
Schattierung mittels einer Gleichung erster Ordnung ausgeführt. Wenn
die Ordnung der zu benutzenden Reflexionsgleichung bestimmt wurde,
so werden die Farbwerte entlang der Kanten des Polygons bestimmt,
und das Polygon wird wiedergegeben, indem durch Vorwärtsdifferenzieren
die Pixel (Anzeigeelemente) auf jeder Abtastlinie, welche das Polygon
schneidet, wiedergegeben werden (Block 320).
-
Ein
zweites Ausführungsbeispiel
der Erfindung wird in den 6a und 6b beschrieben. 6a beschreibt ein Ausführungsbeispiel,
welches die diffuse Reflexion enthält. 6b beschreibt ein Ausführungsbeispiel,
welches außerdem
die spiegelnde Reflexion enthält.
Alternativ kann das Ausführungsbeispiel
gemäß 6a mit dem Ausführungsbeispiel
gemäß 5 kombiniert werden, um
ein umfassendes System zur Verfügung
zu stellen, welches bei seiner Anwendung die Geschwindigkeit des
Ausführungsbeispiels
gemäß 6a und die hohe Präzision des
Ausführungsbeispiels
gemäß 5 nutzt. In ähnlicher
Weise kann das Ausführungsbeispiel
gemäß 6a mit dem Ausführungsbeispiel
gemäß 5 kombiniert werden.
-
Bezugnehmend
auf 6a wird am Block 420 die
Anordnung der Lichtquelle in bezug auf jeden der Eckpunkte bestimmt.
Wenn die Lichtquelle eine positionierte Lichtquelle ist, d.h. eine
Lichtquelle, welche einen endlichen Abstand von den Eckpunkten des
Polygons hat, so wird die Anordnung der Lichtquelle in be zug auf jeden
der Eckpunkte sich ändern.
Wenn die Lichtquelle eine unendlich weit entfernte Lichtquelle ist,
so wird die Anordnung der Lichtquelle für jeden der Eckpunkte die gleiche
sein.
-
Am
Block 430 wird das Punktprodukt des Lichtvektors und der
Oberflächennormalen
an jedem Eckpunkt bestimmt, und am Block 440 werden die
Differenzen zwischen jedem der Punktprodukte an den Eckpunkten berechnet.
Am Block 450 wird der Maximalwert cosdiff(α) als maximale
Differenz zwischen den Punktprodukten bestimmt: max(abs(cos(α1) – cos(α2)), abs(cos(α2) – cos(α3)), abs(cos(α3) – cos(α1))).
-
Dieser
Wert wird benutzt, um zu bestimmen, ob eine Gleichung nullter, erster,
zweiter oder höherer Ordnung
benutzt werden soll, um die Schattierung des Polygons zu berechnen.
Ein erster Grenzwert τD1 wird benutzt, um zu bestimmen, ob eine
Schattierungsgleichung nullter Ordnung benutzt werden soll. Bei
Nutzung einer Schattierungsgleichung nullter Ordnung können Zeit
und Aufwand gespart werden, wobei noch ein Bild der gewünschten
Qualität
erzeugt wird. Ein zweiter Grenzwert τD2 wird
benutzt, um zu bestimmen, ob eine Schattierungsgleichung zweiter
Ordnung benutzt werden sollte.
-
Die
Grenzwerte τD1 und τD2 können
empirisch oder auf der Basis der jeweiligen Anwendung bestimmt werden.
Wenn beispielsweise ein Benutzer ein Bild mit präziser Schattierung wiederzugeben
wünscht,
so ist es zweckmäßig, die
Schattierung mit einer Reflexionsgleichung zweiter Ordnung zu berechnen.
Folglich sollte der Grenzwert τD2 auf einen Wert gesetzt werden, der die
Mehrheit der Anzeigeelemente in dem Polygon mit einer Gleichung
zweiter Ordnung wiederzugeben veranlaßt. Der Grenzwert τD1 kann
auf einen niedrigen Wert und der Grenzwert τD2 kann
ebenfalls auf einen niedrigen Wert gesetzt werden, so daß die Schattierung
der meisten Polygone des Bildes mit Gleichungen zweiter Ordnung
ausgeführt
wird. Wenn andererseits der Benutzer eine schnelle Darstellung des
Bildes wiederzugeben wünscht
und auf die Qualität
des Schattierens keinen Wert legt, so können die Grenzwerte τD1 und τD2 zur
Erzeugung dieses Effekts eingestellt werden. Insbesondere würden die
Grenzwerte τD1 und τD2 auf hohe Werte gesetzt werden, damit die
meisten ausgeführten Tests
anzeigen, daß die
Gleichung nullter Ordnung benutzt wird.
-
Vorzugsweise
werden die Grenzwerte auf Werte gesetzt, welche die Notwendigkeit
eines Qualitätsbildes
und die Notwendigkeit der schnellstmöglichen Wiedergabe des Bildes
ausbalancieren. Außerdem
sollten die Grenzwerte berücksichtigen,
wie glänzend
die Oberfläche
ist, d.h. die Strahlbreite der spiegelnden Reflexion. Wenn die Strahlbreite
groß ist,
wählt die
Technik eine Gleichung erster Ordnung. Dies ergibt akzeptable bis
für das
Auge nahezu perfekte Bilder mit einer Wiedergabegeschwindigkeit,
die 25 bis 50 % schneller ist, als die Wiedergabe des gesamten Bildes
mit Hilfe der Phong-Schattierungsmethode. Bilder von akzeptabler Qualität wurden
ebenfalls erzeugt, wenn die Strahlbreite gering war, obwohl Diskontinuitäten in der
Schattierung bestimmter Polygone auftraten, bei welchen ein Polygon
mittels einer Gleichung erster Ordnung und ein angrenzendes Polygon
mittels einer Gleichung zweiter Ordnung schattiert wurde. Dieses
Problem kann jedoch vermieden werden durch die Benutzung kleinerer
Polygone. Typischerweise wird in der Praxis die Gleichung nullter
Ordnung aufgrund der Notwendigkeit einer Erzeugung von Bildern höherer Qualität nicht
häufig
benutzt. Folglich wird der Grenzwert τD1 vorzugweise
auf einen Wert von ungefähr
0,1 gesetzt, so daß die
meisten Polygone mit Gleichungen höherer Ordnung wiedergegeben
werden.
-
Ein
anderes Ausführungsbeispiel
der Erfindung wird anhand von 6b beschrieben.
Der Verfahrensablauf ist ähnlich
dem in 6a, abgesehen
davon, daß die
spiegelnde Reflexion zusätzlich
zur diffusen Reflexion berücksichtigt
ist. Wenn die spiegelnde Reflexion in das Verfahren einbezogen werden
soll, so wird am Block 610 der Blickpunktvektor für jeden
Eckpunkt berechnet. Die Berechnung normiert jeden Blickpunktvektor auf seinen
Betrag. Am Block 620 wird die Projektion des Reflexionsvektors
auf den Blickpunktvektor an jedem Eckpunkt bestimmt (R·V). Dieser
Wert cos(δ(i))
sagt die spiegelnde Reflexion voraus. Am Block 630 wird
die Differenz zwischen den cos(δ(i))-Werten an jedem Eckpunkt
berechnet, d.h.:
|cos(δ(1)) – cos(δ(2))|, |cos(δ(2)) – cos(δ(3))|, |cos(δ(3)) – cos(δ(1))|.
-
Am
Block 640 wird die maximale Differenz bestimmt. Wenn die
maximale Differenz cosdiff(δ) kleiner
als oder gleich dem ersten Grenzwert ist, so wird am Block 650 eine
Schattierung nullter Ordnung ausgewählt. Wenn die maximale Differenz
cosdiff(δ)
größer als
oder gleich dem zweiten Grenzwert ist, so wird am Block 670 eine
Schattierung zweiter Ordnung ausgewählt. Anderenfalls wird am Block 690 eine
Schattierung erster Ordnung benutzt.
-
9 stellt eine Tabelle dar,
welche die Vorteile der Nutzung des hier beschriebenen Verfahrens
illustriert. Die Tabelle zeigt die Ergebnisse des Schattierens desselben
Objekts mittels der Phong-Schattierungsmethode, welche eine Gleichung
zweiter Ordnung benutzt, der Gouraud-Methode, welche eine Gleichung
erster Ordnung benutzt, und der anpassungsfähigen Schattierungstechnik
der vorliegenden Erfindung. Die Spiegelkraft ist der Wert, welcher
die Reflexionsfähigkeit
der Oberfläche
anzeigt. Wenn die Spiegelkraft wächst, wächst der
Glanz der Oberfläche.
Die Wiedergabezeit ist die Zeitspanne, die zur Wiedergabe des Bildes
mittels dieser Technik gebraucht wird. "NMSE" ist
der normierte mittlere quadratische Fehler zwischen der Pixeldarstellung
des durch die adaptive Schattierungsmethode nach der Erfindung erzeugten
Bildes und der Phong-Schattierungstechnik zweiter Ordnung. Dieser
wurde berechnet mittels der Gleichung:
wobei
Pr(i):
rote Komponente des i'ten
Pixels des über
die Phong-Technik
erzeugten Bildes;
Pg(i): grüne
Komponente des i'ten
Pixels des über
die Phong-Technik
erzeugten Bildes;
Pb(i): blaue Komponente des i'ten Pixels des über die
Phong-Technik erzeugten
Bildes;
Ar(i): rote Komponente des i'ten Pixels desselben Bildes, erzeugt über die
adaptive Schattierung;
Ag(i): grüne Komponente des i'ten Pixels desselben
Bildes, erzeugt über
die adaptive Schattierung;
Ab(i): blaue Komponente des i'ten Pixels desselben
Bildes, erzeugt über
die adaptive Schattierung.
-
Je
kleiner der NMSE-Wert ist, desto höher ist die Qualität des Bildes.
Je geringer somit der Grenzwert τD1 ist, desto besser ist die Qualität des erzeugten
Bildes und desto langsamer ist die Wiedergabezeit. Je höher umgekehrt
der Grenzwert ist, desto geringer ist die Qualität des erzeugten Bildes und
desto schneller ist die Wiedergabezeit unabhängig von der Spiegelkraft,
die bei der Wiedergabe des Bildes benutzt wurde. Im allgemeinen
ist der normierte mittlere quadratische Fehler (NMSE) eines mit
der adaptiven Schattierung erzeugten Bildes kleiner als 0,0001 (verglichen
mit einem Phong-erzeugten Bild), was zeigt, daß das Bild annähernd identisch
mit dem Phong-schattierten Bild ist. Bilder, die einen NMSE-Wert
zwischen 0,0001 und 0,00025 haben, weisen einige kaum sichtbare
Schattierungs-Diskontinuitäten auf,
währenddessen
Bilder, die einen NMSE-Wert zwischen 0,00025 und 0,0005 haben, Schattierungs-Diskontinuitäten aufweisen,
welche sichtbar werden. Bilder mit einem NMSE-Wert über 0,0005 weisen deutliche
Sprünge
oder Brüche
auf.
-
Die
Erfindung ist eindeutig nicht auf irgendeinen speziellen Gleichungstyp
zur Berechnung der Schattierung eines Polygons begrenzt. Beim Lesen
der Beschreibung wird es für
den Fachmann klar, daß jede
beliebige bekannte Schattierungsmethode zur Ausführung der Erfindung benutzt
werden kann; vorzugsweise werden jedoch die folgenden Gleichungen
benutzt. Die Gleichungen benutzen viele der zuvor zur Bestimmung der
Ordnung der zu benutzenden Gleichung ausgeführten Berechnungen und sparen
somit Zeit in der Ausführung
des Schattierungsalgorithmus. Die beschriebenen Berechnungen benutzen
die Abtastzeilentechnik, die zuvor für Gleichungen aller Ordnungen
beschrieben wurde.
-
Die
folgenden Gleichungen benutzen ein einfaches Dreieck, aber die Technik
läßt sich
auf beliebige Polygone und parametrische Oberflächen ausdehnen. Die Normalenvektoren
an speziellen Punkten oder Eckpunkten werden aus den parametrischen
Funktionen, welche die Oberfläche
definieren, bestimmt (siehe Bartels, Beatty, Barsky: "An Introduction to
Splines for Use in Computer Graphics" (Margan Kaufmann, 1987), Seiten 293–299; Faux,
Pratt: "Computational
Geometry for Design and Manufacture" (Wiley 1979), Seiten 110–113).
-
Die
Lösung
erster Ordnung berechnet die totale Reflexion an den Eckpunkten
des Dreiecks. Wenn die Reflexion nur aus der ambienten und der diffusen
Reflexion besteht; lauten die Gleichungen: C(1)
= (Ka + Kd·cos(α1))·C(1), C(2) = (Ka + Kd·cos(α2))·C(2), C(3)
= (Ka + Kd·cos(α3))·C(3),wobei
Ka der Koeffizient der ambienten Reflexion, Kd der Koeffizient der
diffusen Reflexion und cos(α1) = Lx(1)·Nx(1)+Ly(1)·Ny(1)+Lz(1)·Nz(1), cos(α2)
= Lx(2)·Nx(2)+Ly(2)·Ny(2)+Lz(2)·Nz(2), cos(α3)
= Lx(3)·Nx(3)+Ly(3)·Ny(3)+Lz(3)·Nz(3),ist.
Es sollte angemerkt werden, daß die
oben genannten Gleichungen zur Vereinfachung der Beschreibung die
separaten Ausdrücke
für jede
Farbkomponente verdichten. Wenn der Farbraum additiv ist, haben
die separaten Komponenten die gleiche Form.
-
Wenn
in die Reflexion die spiegelnde Reflexion einbezogen werden soll,
werden die Ausdrücke
zu: C(1) = (Ka + Kd·cos(α1))·C(1) + Ks·(cos(δ1))p·Cl, C(2)
= (Ka + Kd·cos(α2))·C(2) +
Ks·(cos(δ2))p·Cl, C(3) = (Ka + Kd·cos(α3))·C(3) + Ks·(cos(δ3))p·Cl,wobei Cl die Lichtquellenfarbe
ist, Ks der Koeffizient der spiegelnden Reflexion und cos(δ1) = 2·cos(α1)·cos(β1) – cos(χ1) cos(δ2)
= 2·cos(α2)·cos(β2) – cos(χ2) cos(δ3)
= 2·cos(α3)·cos(β3) – cos(χ3)wobei cos(β1)
= Nx(1)·Vx(1)
+ Ny(1)·Vy(1)
+ Nz(1)·Vz(1), cos(β2)
= Nx(2)·Vx(2)
+ Ny(2)·Vy(2)
+ Nz(2)·Vz(2), cos(β3)
= Nx(3)·Vx(3)
+ Ny(3)·Vy(3)
+ Nz(3)·Vz(3),und cos(χ1)
= Vx(1)·Lx(1)
+ Vy(1)·Ly(1)
+ Vz(1)·Lz(1), cos(χ2)
= Vx(2)·Lx(2)
+ Vy(2)·Ly(2)
+ Vz(2)·Lz(2), cos(χ3)
= Vx(3)·Lx(3)
+ Vy(3)·Ly(3)
+ Vz(3)·Lz(3),
-
Um
die Differenz zwischen den Farbwerten zwischen angrenzenden Dreiecken
zu minimieren wenn eine Lösung
nullter Ordnung benutzt wird, werden die Farbwerte an den drei Eckpunkten
gemittelt. (Dieser Mittelwert stimmt mit dem Farbwert überein,
welchen die Lösung
erster Ordnung im Mittelpunkt des Dreiecks verwirklicht): C = 0,33·(C(1)
+ C(2) + C(3)).
-
Die
Lösung
erster Ordnung leitet die Farbwerte wie oben gezeigt ab. Bei einer
Lösung
erster Ordnung werden dieselben oben (in bezug auf die Lösung nullter
Ordnung) beschriebenen Gleichungen benutzt. Die Lösung erster
Ordnung mittelt nicht die Eckpunkt-Farbwerte sondern interpoliert
die Farbwerte. Hier wird ein Verfahren beschrieben, das einen Abtastlinien-Algorithmus
(siehe Beschreibungseinleitung) in bezug auf Eckpunktfarben benutzt.
Entsprechend der Kantenlogik werden die Farbwerte zuerst entlang
jeder Dreieckskante interpoliert und dann entlang jeder Abtastlinie
des Dreiecks.
-
Bei
einer Gleichung zweiter Ordnung werden die Farbwerte an den Dreieckseckpunkten
bestimmt. Diese Farbwerte repräsentieren
zwei Randbedingungen für
jede Dreieckskante, d.h. die Farbwerte an den zwei Endpunkten jeder
Dreieckskante. Da die Gleichung zweiter Ordnung definitionsgemäß drei Randbedingungen
erfordert, interpoliert die Lösung
für die
ambiente und die diffuse Reflexion den Normalenvektor und den Lichtvektor
für einen
zwischen den Dreieckseckpunkten liegenden Ort auf der Dreieckskante.
Das unten genannte Beispiel nimmt an, daß dieser Ort die Mitte der
Kante ist, und außerdem
nimmt dieses Beispiel den schlechtesten Fall an, bei dem sich sowohl
der Normalenvektor als auch der Lichtvektor über das Dreieck ändern. Somit
wird die dritte Randbedingung, welche im vorliegenden Beispiel die
Hälfte
der Distanz zwischen den Eckpunkten ist (siehe
10a), wie folgt bestimmt:
und Nx(4),
Ny(4), Nz(4) sind die Normalenkoordinaten für den ausgewählten Punkt
zwischen dem ersten und dem zweiten Eckpunkt, Nx(5), Ny(5) und Nz(5)
die Normalenkoordinaten für
den ausgewählten
Punkt zwischen dem zweiten und dem dritten Eckpunkt und Nx(6), Ny(6)
und Nz(6) die Normalenkoordinaten für den ausgewählten Punkt
zwischen dem dritten und dem ersten Eckpunkt.
-
Außerdem sind:
wobei
Lx(4), Ly(4) und Lz(4) die Lichtvektorkoordinaten des ausgewählten Punktes
zwischen dem ersten und dem zweiten Eckpunkt, Lx(5), Ly(5) und Lz(5)
die Lichtvektorkoordinaten des ausgewählten Punktes zwischen dem
zweiten und dem dritten Eckpunkt und Lx(6), Ly(6) und Lz(6) die
Lichtvektorkoordinaten des ausgewählten Punktes zwischen dem
dritten und dem ersten Eck punkt sind. Um die Vektoren zu normieren,
werden die Beträge
der Vektoren berechnet. Um Rechenzeit und Aufwand zu sparen, wird
die Division durch den Betrag vorzugsweise hinter die Berechnung
der diffusen Gewichte zurückgestellt:
cos(α4):
= (Lx(4)·Nx(4)
+ Ly(4)·Ny(4)
+ Lz(4)·Nz(4))/(L(4)·N(4)) cos(α5):
= (Lx(5)·Nx(5)
+ Ly(5)·Ny(5)
+ Lz(5)·Nz(5))/(L(5)·N(5)) cos(α6):
= (Lx(6)·Nx(6)
+ Ly(6)·Ny(6)
+ Lz(6)·Nz(6))/(L(6)·N(6))wobei
L(4): = √Lx(4)·Lx(4) + Ly(4)·Ly(4)
+ Lz(4)·Lz(4) L(5): = √Lx(5)·Lx(5) + Ly(5)·Ly(5)
+ Lz(5)·Lz(5) L(6): = √Lx(6)·Lx(6) + Ly(6)·Ly(6)
+ Lz(6)·Lz(6) und
N(4): = √Nx(4)·Nx(4) + Ny(4)·Ny(4)
+ Nz(4)·Nz(4) N(5): = √Nx(5)·Nx(5) + Ny(5)·Ny(5)
+ Nz(5)·Nz(5) N(6): = √Nx(6)·Nx(6) + Ny(6)·Ny(6)
+ Nz(6)·Nz(6) -
Die
zusammengesetzte Reflexion für
die Mittelpunkte, die als dritte Randbedingung genutzt werden soll,
wird bestimmt: C(4): = (Ka + Kd·cos(α4))·C(4) C(5): = (Ka + Kd·cos(α5))·C(5) C(6):
= (Ka + Kd·cos(α6))·C(6)
-
Im
vorliegenden Beispiel wird der schlechteste Fall angenommen, bei
dem die Eckpunktfarben selbst über
das Dreieck variieren. Somit sind die Farben der Zwischenpunkte
auf der Polygonkante:
-
Wenn
die zusammengesetzte Reflexion die spiegelnde Reflexion einschließen soll,
werden die Blickpunktvektoren an den Mittelpunkten ebenso bestimmt.
Das Beispiel nimmt wiederum den schlechtesten Fall an, bei dem der
Blickpunktvektor sich über
das Dreieck ändert:
-
Die
Beträge
zur Normierung der Vektoren werden dann berech net. Die am wenigstens
aufwendige Berechnungsweise ergibt sich durch Zurückstellung
der Division durch den Betrag hinter die Berechnung der spiegelnden
Gewichte: cos(δ4):
= 2·cos(α4)·cos(β4) – cos(χ4) cos(δ5):
= 2·cos(α5)·cos(β5) – cos(χ5) cos(δ6):
= 2·cos(α6)·cos(β6) – cos(χ6)wobei cos(β4):
= (Nx(4)·Vx(4)
+ Ny(4)·Vy(4)
+ Nz(4)·Vz(4))/(N(4)·V(4)) cos(β5):
= (Nx(5)·Vx(5)
+ Ny(5)·Vy(5)
+ Nz(5)·Vz(5))/(N(5)·V(5)) cos(β6):
= (Nx(6)·Vx(6)
+ Ny(6)·Vy(6)
+ Nz(6)·Vz(6))/(N(6)·V(6))und cos(χ4):
= (Vx(4)·Lx(4)
+ Vy(4)·Ly(4)
+ Vz(4)·Lz(4))/(V(4)·L(4)) cos(χ5):
= (Vx(5)·Lx(5)
+ Vy(5)·Ly(5)
+ Vz(5)·Lz(5))/(V(5)·L(5)) cos(χ6):
= (Vx(6)·Lx(6)
+ Vy(6)·Ly(6)
+ Vz(6)·Lz(6))/(V(6)·L(6))wobei V(4): = √Vx(4)·Vx(4) + Vy(4)·Vy(4)
+ Vz(4)·Vz(4) V(5): = √Vx(5)·Vx(5) + Vy(5)·Vy(5)
+ Vz(5)·Vz(5) V(6): = √Vx(6)·Vx(6) + Vy(6)·Vy(6)
+ Vz(6)·Vz(6)
-
Die
Addition der spiegelnden ändert
die zusammengesetzte Reflexion zu: C(4) = (Ka
+ Kd·cos(α4))·C(4) +
Ks·(cos(δ4)p)·Cl, C(5) = (Ka + Kd·cos(α5))·C(5) + Ks·(cos(δ5)p)·Cl, C(6)
= (Ka + Kd·cos(α6))·C(6) +
Ks·(cos(δ6)p)·Cl,
-
Die
zusätzlichen
Farbwerte C(4), C(5), C(6) liefern die dritte Randbedingung.
-
Wie
bereits gesagt, erfordert die Lösung
zweiter Ordnung drei Randbedingungen (siehe 10b), um die Koeffizienten (m0, m1, m2)
der Gleichung zweiter Ordnung abzuleiten:
C(u(i)) = mo(i) +
m1(i)·u(i)
+ m2(i)·u(i)2 wobei 0 < =
u(i) < = 1.
-
Um
die Koeffizienten zu berechnen, werden gleichzeitig die Gleichungen
für die
drei Randbedingungen bestimmt. Die Randbedingungen sind: C(1) = m0(1) C(4) = m0(1)
+ 0,5m1(1) + 0,25m2(1) C(2) = m0(1) + m1(1)
+ m2(1) C(2) = m0(2) C(3)
= m0(3) C(5) = m0(2) + 0,5m1(2) + 0,25m2(2) C(3) = m0(3) C(6) = m0(3)
+ 0,5m1(3) + 0,25m2(3) C(1) = m0(3) + m1(3)
+ m2(3)
-
Die
Parametervariable ist:
wobei
-
Nachdem
die Koeffizienten bestimmt wurden, kann die Gleichung zweiter Ordnung
auf Vorwärts-Differenzgleichungen
reduziert werden, um die Farbe entlang der Kanten zu berechnen.
-
Um
die Farbe innerhalb des Dreiecks zu berechnen, wird die Lösung zweiter
Ordnung benutzt, und die Werte werden, wie oben gezeigt, entlang
der Kanten interpoliert, um die Vektorwerte an jeder Seite der Rasterspannweite
aufzustellen. Die Vektorwerte werden dann zum Zentrum der Spannweite
interpoliert. Gemäß
10c werden die Vektoren
an einem Punkt in der Mitte der Spannweite wie folgt bestimmt:
von welchen
der Kosinusterm für
die Reflexionsgleichungen berechnet wird:
cos(δxc): = 2·cos(αxc)·cos(βxc) – cos(χxc)wobei
cos(αxc):
= (Lx(xc)·Nx(xc)
+ Ly(xc)·Ny(xc)
+ Lz(xc)·Nz(xc))/(L(xc)·N(xc))) cos(βxc):
= (Nx(xc)·Vx(xc)
+ Ny(xc)·Vy(xc)
+ Nz(xc)·Vz(xc))/(N(xc)·V(xc))) cos(χxc):
= (Vx(xc)·Lx(xc)
+ Vy(xc)·Ly(xc)
+ Vz(xc)·Lz(xc))/(V(xc)·L(xc))) und
L(xc): = √Lx(xc)·Lx(xc) + Ly(xc)·Ly(xc)
+ Lz(xc)·Lz(xc) N(xc): = √(Nx(xc)·Nx(xc) + Ny(xc)·Ny(xc)
+ Nz(xc)·Nz(xc) V(xc): = √(Vx(xc)·Vx(xc) + Vy(xc)·Vy(xc)
+ Vz(xc)·Vz(xc) -
Die
Farbe an dem Spannweitenmittelpunkt ist somit: C(xc):
= (Ka + Kd·cos(αxc))·C(xc)
+ Ks·cos(δxc)p·Cl,welche
den dritten Farbwert liefert, um die Randbedingungen zu vervollständigen (siehe 10c): C(xl)
= m0(4) C(xc) = m0(4) + 0,5·m1(4)
+ 0,25·m2(4) C(xr) = mo(4) + m1(4) + m2(4)
-
Vorwärtsdifferenzgleichungen
werden dann benutzt, um über
das Dreieck zu interpolieren, um die komplette Reflexionsgleichung
zu realisieren.
-
Diese
Technik kann auch auf Gleichungen dritter Ordnung erweitert werden.
Vier Farbwerte für
jede Kante werden berechnet, um die vier für eine Lösung dritter Ordnung erforderlichen
vier Randbedingungen zu spezifizieren. Zusätzlich zu den zwei Eckpunktfarben
werden die Farbwerte bei einem Drittel und zwei Dritteln der Kantenlänge bestimmt.
Somit werden die Randbedingungen für die Kantenlogik (siehe 10d) zu: C(1)
= m0(1) C(4) = m0(1) + 0,33m1(1) + 0,11m2(1)
+ 0,04m3(1) C(5) = m0(1) + 0,67m1(1) + 0,44m2(1)
+ 0,30m3(1) C(2) = m0(1) + m1(1) + m2(1)
+ m3(1) C(2) = m0(2) C(6)
= m0(2) + 0,33m1(2) + 0,11m2(2) + 0,04m3(2) C(7)
= m0(2) + 0,67m1(2) + 0,44m2(2) + 0,30m3(2) C(3)
= m0(2) + m1(2) + m2(2) + m3(2) C(3) = m0(3) C(8) = m0(3) + 0,33m1(3) + 0,11m2(3) + 0,04m3(3) C(9) = m0(3) + 0,67m1(3) + 0,44m2(3) + 0,30m3(3) C(1) = m0(3) + m1(3) + m2(3) + m3(3)
-
Dann
werden die vier Randbedingungen für den Rasterausschnitt bestimmt.
Die Randbedingungen für die
Abtastlogik (siehe 10e)
werden zu: C(xl) = m0(4) C(xm)
= m0(4) + 0,33m1(4) + 0,11m2(4) + 0,04m3(4) C(xn)
= m0(4) + 0,67m1(4) + 0,44m2(4) + 0,30m3(4) C(xr)
= m0(4) + m1(4) + m2(4) + m3(4)
-
Die
Abtastzeilentechnik ist ein Verfahren zur Interpolation der Eckpunktattribute
(Farben) über
das Dreieck. Der Vorteil der Anwendung der Abtastlinientechnik ist,
daß sie
sich auf Polygone beliebiger Gestalt erweitern läßt, weil das Polygon stets
auf einfache Segmente zwischen Kanten reduziert wird und die Eckpunktattribute
für jedes
Segment berechnet werden. Jedoch schließen die berechneten Differenzgleichungen
die Divisionsberechnungen für
jedes Segment, einen zeitraubenden Prozeß, ein. Andererseits können anstelle von
einfachen Dreiecken Ebenengleichungen benutzt werden. Die drei Randbedingungen
sind die Eckpunktlagen an den drei Dreieckseckpunkten und die Differenzgleichungen
werden für
das vollständige
einfache Gebilde berechnet. Somit werden die Differenzgleichungen
auf das gesamte Dreieck angewendet. Obwohl Ebenengleichungen leicht
auf ein Dreieckspolygon angewendet werden können, können sie nicht auf ein Polygon angewendet
werden, das mehr als drei Eckpunkte hat, weil es vorkommen kann,
daß die
Eckpunkte nicht koplanar sind.
-
Um
die Schattierung mit Hilfe der Ebenengleichungen zu bestimmen, wird
zuerst die Farbe an den drei Eckpunkten berechnet. Die Randbedingungen
werden dann berechnet. Um die Randbedingungen zu berechnen, werden
die Vektoren (Normalen-, Licht- und
Blickpunkt-Vektor) im Dreiecksmittelpunkt bestimmt (siehe
11a). Die Vektoren werden
in den Farbwert unter Benutzung der oben beschriebenen Reflexionsgleichungen
eingesetzt. Diese vier Farbwerte werden dann in den folgenden bilinearen
Ausdruck eingesetzt:
und 0 < = u < = 1, 0 < = v < = 1
und die
Parametervariablen (u, v) sind:
u: = u + du wobei du = 1/(Py(2) – Py(1))
v:
= v + dv wobei dv = 1/(Px(2) – Px(3)).
-
Die
Randbedingungen für
die Lösung
erster Ordnung sind:
C(1) = m00 + m01u·m10·v + m11·u·v wobei u = 0, v = 0
C(2)
= m00 + m01·u·m10·v + m11·u·v wobei
u = 1, v = 1
C(3) = m00 + m01·u·m10·v + m11·u·v wobei u = 1, v = 0
C(4)
= m00 + m01·u·m10·v + m11·u·v wobei
u = 2/3, v = 1/2 und somit C(1) = m00 C(2) = m00 + m01 + m10 + m11 C(3)
= m00 + m01 C(4) = m00 + 0,67·m01 +
0,5·m10
+ 0,33·m11.
-
Es
gibt algebraische Lösungen
für die
Koeffizienten (c00, c01, c10, c11). Der bilineare Ausdruck für die Farben
wird in Vorwärtsdifferenzgleichungen
konvertiert, welche zur Interpolation über das Dreieck benutzt werden.
-
Die
Ebenentechnik kann auf Gleichungen zweiter Ordnung erweitert werden.
Die Formel hierfür
ist:
wobei
0 < = u < 1, 0 < = v < = 1.
-
Da
eine Lösung
zweiter Ordnung neun Randbedingungen erfordert, müssen die
Vektoren an neun Orten (siehe 11c)
bestimmt werden. Die Reflexionsgleichungen (zuvor beschrieben) werden
benutzt, um die Formwerte an den neun Orten zu berechnen. Die Randbedingungen
für die
Koeffizienten (m00, m01, m22) werden dann gelöst. Hierfür sind die Randbedingungen
(in bezug auf 11d): C(1) = m00 + m01·u + m02·u2 +
m10·v
+ m11·u·v + m12·u2v + m20·v2 +
m21·u·v2 + m22·u2·v2 wobei u = 0, v = 0 C(2)
= m00 + m01·u
+ m02·u2 + m10·v
+ m11·u·v + m12·u2v + m20·v2 +
m21·u·v2 + m22·u2·v2 wobe i u = 1, v = 1 C(3)
= m00 + m01·u
+ m02·u2 + m10·v
+ m11·u·v + m12·u2v + m20·v2 +
m21·u·v2 + m22·u2·v2 wobei u = 1, v = 0 C(4)
= m00 + m01·u
+ m02·u2 + m10·v
+ m11·u·v + m12·u2v + m20·v2 +
m21·u·v2 + m22·u2·v2 wobei u = 1/2, v = 1/2 C(5)
= m00 + m01·u
+ m02·u2 + m10·v
+ m11·u·v + m12·u2v + m20·v2 +
m21·u·v2 + m22·u2·v2 wobei u = 1, v = 1/2 C(6)
= m00 + m01·u
+ m02·u2 + m10·v
+ m11·u·v + m12·u2v + m20·v2 +
m21·u·v2 + m22·u2·v2 wobei u = 1/2, v = 0 C(7)
= m00 + m01·u
+ m02·u2 + m10·v
+ m11·u·v + m12·u2v + m20·v2 +
m21·u·v2 + m22·u2·v2 wobei u = 2/3, v = 2/3 C(8)
= m00 + m01·u
+ m02·u2 + m10·v
+ m11·u·v + m12·u2v + m20·v2 +
m21·u·v2 + m22·u2·v2 wobei u = 2/3, v = 1/3 C(9)
= m00 + m01·u
+ m02·u2 + m10·v
+ m11·u·v + m12·u2v + m20·v2 +
m21·u·v2 + m22·u2·v2 wobei u = 1/3, v = 1/3 und somit: C(1) = 1,00·m00 C(2) = 1,00·m00
+ 1,00·m01
+ 1,00·m02
+ 1,00·m10
+ 1,00·m11
+ 1,00·m12
+ 1,00·m20
+ 1,00·m21
+ 1,00·m22 C(3) = 1,00·m00
+ 1,00·m01
+ 1,00·m02 C(4) = 1,00·m00
+ 0,50·m01
+ 0,25·m02
+ 0,50·m10
+ 0,25·m11
+ 0,12·m12
+ 0,25·m20
+ 0,12·m21
+ 0,06·m22 C(5) = 1,00·m00
+ 1,00·m01
+ 1,00·m02
+ 0,50·m10
+ 0,50·m11
+ 0,50·m12
+ 0,25·m20
+ 0,12·m21
+ 0,25·m22 C(6) = 1,00·m00
+ 0,50·m01
+ 0,25·m02
+ 1,00·m10
+ 0,50·m11
+ 0,25·m12
+ 1,00·m20
+ 0,50·m21
+ 0,25·m22 C(7) = 1,00·m00
+ 0,67·m01
+ 0,44·m02
+ 1,67·m10
+ 0,44·m11
+ 0,30·m12
+ 0,40·m20
+ 0,30·m21
+ 0,19·m22 C(8) = 1,00·m00
+ 0,67·m01
+ 0,44·m02
+ 0,33·m10
+ 0,22·m11
+ 0,15·m12
+ 0,11·m20
+ 0,07·m21
+ 0,05·m22 C(9) = 1,00·m00
+ 0,33·m01
+ 0,11·m02
+ 0,33·m10
+ 0,11·m11
+ 0,04·m12
+ 0,11·m20
+ 0,04·m21
+ 0,01·m22
-
Der
biquadratische Ausdruck für
die Farbe wird dann in Vorwärtsdifferenzgleichungen
konvertiert, welche zur Interpolation über das Dreieck benutzt werden.
-
Es
gibt drei Ausnahmen für
die Lösung
zweiter Ordnung. Die erste Situation bezieht sich auf die Funktion,
welche sichert, daß die
Gewichte positiv bleiben: cos(α(i)): = max(cos(α(i)), 0) cos(δ(i)):
= max(cos(δ(i)),
0)
-
Wenn
sich ein negatives diffuses Gewicht ergibt, so wird der Ort auf
der Dreieckskante bestimmt, an dem der Wert gleich Null wird. Das
Dreieck wird an diesem Punkt geteilt, was zu einer mosaikförmigen Aufteilung
des Dreiecks in zwei, drei oder vier Dreiecke führt. Die Anzahl der Dreiecke
hängt davon
ab, ob einer, zwei oder drei Kanten zugeordnete Werte gefunden wurden.
-
Die
zweite Situation tritt auf, wenn die Oberflächenkrümmung stark ist. Das Maß von cos(ϕ)
offenbart diese Bedingung. Da eine Gleichung dritter Ordnung die Änderung
des Normalenvektors über
das Dreieck unterbewerten kann, wird das Dreieck in mehrere Dreiecke
aufgeteilt.
-
Die
dritte Situation tritt auf, wenn die Lichtquelle nahe dem Dreieck
ist. Das Maß von
cos(χ)
offenbart diese Bedingung. Da die Gleichung dritter Ordnung die Änderung
des Lichtvektors über
das Dreieck unterbewerten kann, wird das Dreieck in mehrere Dreiecke
aufgeteilt.
-
Die
folgende Diskussion illustriert das adaptive Schattierungssystem
der vorliegenden Erfindung. Dieses Beispiel umfaßt nur den diffusen Beleuchtungsfall
und berücksichtigt
nicht die spiegelnde Illumination. Weil die spiegelnde Illumination
nicht berücksichtigt
wird, ist es nicht notwendig, den Blickpunktvektor zu berechnen.
Das Bild enthält
ein Dreiecksnetzwerk, welches aus sechs Eckpunkten, die vier Dreiecke
bilden, besteht. Dieses Beispiel nimmt an, daß der Farbwert C(i) und der
Lichtvektor L(i) an jedem Eckpunkt konstant sind, aber daß der Normalenvektor
N(i) sich an jedem Eckpunkt ändert.
Die Werte für
die Normalenvektoren sind:
N(v0) = (0,000000, 0,000000, 1,000000)
N(v1)
= (0,017450, –0,017452,
0,999695)
N(v2) = (0,035188, –0,034590, 0,998782)
N(v3)
= (0,053199, –0,051396,
0,997260)
N(v4) = (0,071466, –0,067857, 0,995132)
N(v5)
= (0,089973, –0,083957,
0,992399)
-
Das
Beispiel nimmt an, daß der
Lichtvektor L(vi) = (0, 0, 1) ist.
-
Der
erste Schritt ist die Berechnung der diffusen Gewichte gemäß der Gleichung: cos(α(v))
= N(v)·L(v)
-
Die
Werte dieses Beispiels sind:
cos(α(v0)) = 1,000000
cos(α(v1)) = 0,999695
cos(α(v2)) = 0,998782
cos(α(v3)) = 0,997260
cos(α(v4)) = 0,995132
cos(α(v5)) = 0,992399.
-
Dann
wird die Änderung
der Intensität
bestimmt. Die maximale Differenz zwischen den diffusen Gewichten
ist das Maß,
welches die maximale Änderung
voraussagt: dcos(α(t0)) = max(abs(cos(α(v0)) – cos(α(v1))), abs(cos(α(v1)) – cos(α(v2))) – abs(cos(α(v2)) – cos(α(v0)))) dcos(α(t1))
= max(abs(cos(α(v0)) – cos(α(v3))), abs(cos(α(v3)) – cos(α(v1))) – abs(cos(α(v1)) – cos(α(v0))))) dcos(α(t2))
= max(abs(cos(α(v1)) – cos(α(v4))), abs(cos(α(v4)) – cos(α(v2))) – abs(cos(α(v2)) – cos(α(v1)))) dcos(α(t3))
= max(abs(cos(α(v0)) – cos(α(v2))), abs(cos(α(v2)) – cos(α(v5))) – abs(cos(α(v5)) – cos(α(v0))))
-
Die
Werte für
die maximale Änderung
sind:
cosdiff(α(t0)) = 0,001218
cosdiff(α(t1))
= 0,002740
cosdiff(α(t2)) = 0,004563
cosdiff(α(t3))
= 0,007601.
-
Die
maximale Änderung
wird dann mit dem ersten (ε1)
und dem zweiten (ε2)
Grenzwert verglichen. In diesem Beispiel sind die Grenzwerte:
ε1 = 0,0025,
wobei ε1
die nullte von der ersten Ordnung trennt;
ε2 = 0,0050, wobei ε2 die erste
von der zweiten Ordnung trennt.
-
In
bezug auf das erste Dreieck ergibt sich: 0 < max(cosdiff(α(t0))) < ε1.
-
Dafür wird eine
Gleichung nullter Ordnung benutzt. Um irgendeine Differenz zwischen
den diffusen Gewichten an den drei Eckpunkten zu kompensieren, werden
die Werte gemittelt: cos(α(t0)) = 0,333·(cos(α(v0)) + cos(α(v1)) + cos(α(v2)))
-
Dann
wird die konstante Farbe bestimmt: C(t0) = (Ka
+ Kd·cos(α(t0))·C(t0)).
-
In
bezug auf das zweite und dritte Dreieck ergibt sich: ε1 < max(dcos(α(t1))) < ε2 ε1 < max(dcos(α(t2))) < ε2
-
Es
werden Gleichungen erster Ordnung benutzt. Bei einem Abtastlinienalgorithmus
angewendet, erfordert die Lösung,
daß zuerst
die Farbwerte entlang der Dreieckskanten interpoliert werden. Dann
werden die Farbwerte von der linken Kante zur rechten Kante über das
Dreieck interpoliert. Beispielsweise ergibt sich in bezug auf das
zweite Dreieck: C(v0) = (Ka + Kd·cos(α(v0))·C(t1)) C(v3) = (Ka + Kd·cos(α(v3))·C(t1)) C(v1)
= (Ka + Kd·cos(α(v1))·C(t1))
-
Dann
wird die Abtastlinienlogik benutzt, um zuerst die Farbwerte auf
den Dreieckskanten und dann über
das Dreiecksinnere zu interpolieren.
-
Die
maximale Änderung
des vierten Dreiecks ist: dcos(α(t3))) > ε2
-
Somit
wird eine Gleichung zweiter Ordnung (Phong-Schattierung) für dieses
Dreieck ausgewählt. Während die
Technik die Tatsache ausnutzen kann, daß das diffuse Gewicht jederzeit
an den Eckpunkten zur Verfügung
steht, müssen
die Normalenkomponenten entlang der Dreieckskanten fortschreitend
ermittelt werden. In jedem Schritt werden die Komponenten normiert.
Dann werden die Normalenkomponenten über den Dreiecksinnenraum schrittweise
ermittelt und die Normalenkomponenten an jedem Pixel normiert. Dann
werden die diffusen Gewichte an jedem Pixel bestimmt: cos(α(x,y) = Lx(x,y)·Nx(x,y)
+ Ly(x,y)·Ny(x,y)
+ Lz(x,y)·Nz(x,y) C(x,y) = (Ka + Kd·cos(α(x,y)))·C(t3), wobei L(x,y) als
konstant unterstellt wird.
-
Obwohl
die vorliegende Erfindung in Verbindung mit den bevorzugten Ausführungsbeispielen
beschrieben wurde, ist es klar, daß im Rahmen der Erfindung zahlreiche
Alternativen, Modifikationen, Abänderungen
und Anwendungen möglich
sind. Insbesondere kann die Erfindung auf andere als die beschriebenen Schattierungsgleichungen
angewendet werden. Es können
Grenzwerte hinzugefügt
werden, um die Anzahl der ausgeführten
Tests und die Anzahl der benutzbaren Gleichungen verschiedener Ordnung
zu erhöhen.
Andererseits kann das System so konfiguriert werden, daß es nur
Schattierungsgleichungen nullter und erster Ordnung oder nur Gleichungen
erster und zweiter Ordnung benutzt.