CN215847180U - 一种数控cnc自动上下料机器人 - Google Patents
一种数控cnc自动上下料机器人 Download PDFInfo
- Publication number
- CN215847180U CN215847180U CN202122091539.0U CN202122091539U CN215847180U CN 215847180 U CN215847180 U CN 215847180U CN 202122091539 U CN202122091539 U CN 202122091539U CN 215847180 U CN215847180 U CN 215847180U
- Authority
- CN
- China
- Prior art keywords
- fixedly connected
- rotating
- connecting rod
- fixed
- clamping jaw
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Landscapes
- Manipulator (AREA)
Abstract
本实用新型公开了一种数控CNC自动上下料机器人,涉及自动上下料机器人设备技术领域,包括滑道,所述滑道下表面的前后两端均固定连接有支撑腿,所述滑道上滑动连接有滑板,所述滑板左有两侧均开设有滑槽,左侧所述滑槽的下侧表面开设有齿轮轨道,所述滑板的左侧表面通过电机底座固定连接有运动电机。在运动电机的作用下带动运动齿轮在齿轮轨道上运动,从而带动整个设备实现远距离的送料,通过旋转电机一、旋转电机二和旋转电机三控制连接杆一、连接杆二和夹具底座在上下和左右方向上的移动,配合固定旋转气缸和活动旋转气缸,从而使得设备可以进行前后以及左右方向的旋转工作,在夹紧气缸的作用下,通过带动活动夹爪。
Description
技术领域
本实用新型涉及自动上下料机器人设备技术领域,具体是涉及一种数控CNC自动上下料机器人。
背景技术
在机械加工领域,上料以及下料过程是加工的重要环节,上料效率的高度决定了企业的生产能力,现有的机床加工设备多数采用人工进行上下料,或是采用半自动化操作进行上料或下料,降低了整体的生产效率;工人要近距离的接触机床进行上下料,存在一定的安全隐患,同时,人工进行上下料,装夹的精度很难保证一致或合格,进而影响产品的加工精度和质量。
实用新型内容
为解决上述技术问题,提供一种数控CNC自动上下料机器人,本技术方案解决了上述背景技术中提出的人工进行上下料存在一定安全以及生产效率较低,装夹精度无法保证影响产品质量的问题。
为达到以上目的,本实用新型采用的技术方案为:
一种数控CNC自动上下料机器人,包括滑道,所述滑道下表面的前后两端均固定连接有支撑腿,所述滑道上滑动连接有滑板,所述滑板左右两侧均开设有滑槽,左侧所述滑槽的下侧表面开设有齿轮轨道,所述滑板的左侧表面通过电机底座固定连接有运动电机,所述运动电机的输出端固定连接有运动齿轮,所述运动齿轮与齿轮轨道啮合,所述滑板上表面固定连接有旋转外箱和固定旋转气缸,所述固定旋转气缸位于旋转外箱内部,所述固定旋转气缸的输出端贯穿旋转外箱的顶部,并固定连接有旋转底座,所述旋转外箱的上端开设有限位槽。
优选的,所述旋转底座下表面固定连接有限位柱,所述限位柱位于限位槽内,所述旋转底座上端通过销栓铰接有连接杆一,所述旋转底座上表面固定连接有旋转电机一,所述旋转电机一的输出端与连接杆一的前侧表面固定连接。
优选的,所述连接杆远离旋转电机一的一端通过销栓铰接有连接杆二,所述连接杆一远离旋转电机一一端的前侧表面固定连接有旋转电机二,所述旋转电机二的输出端与连接杆二的前侧表面固定连接。
优选的,所述连接杆二远离旋转电机二的一端开设有放置槽,所述放置槽底部固定连接有活动旋转气缸,所述连接杆远离旋转电机二的一端转动连接有旋转套筒,所述活动旋转气缸的输出端与旋转套筒侧面固定连接。
优选的,所述旋转套筒远离活动旋转气缸的一端通过销栓铰接有夹具底座,所述旋转套筒的前侧表面固定连接有旋转电机三,所述旋转电机三的输出端与夹具底座的前侧表面固定连接。
优选的,所述夹具底座的下表面固定连接有固定夹爪,所述固定夹爪的前侧表面固定连接有夹紧气缸,所述夹紧气缸输出端贯穿固定夹爪,并铰接有活动夹爪。
优选的,所述活动夹爪的前侧表面的上端固定连接有辅助弹簧,所述辅助弹簧远离活动夹爪的一端与固定夹爪的后侧表面固定连接。
本实用新型中提供一种数控CNC自动上下料机器人,具备以下有益效果:
本实用新型中设置有运动电机,在运动电机的作用下带动运动齿轮在齿轮轨道上运动,从而带动整个设备实现远距离的送料,通过旋转电机一、旋转电机二和旋转电机三控制连接杆一、连接杆二和夹具底座在上下和左右方向上的移动,配合固定旋转气缸和活动旋转气缸,从而使得设备可以进行前后以及左右方向的旋转工作,在夹紧气缸的作用下,通过带动活动夹爪,从而实现生产原料的夹取和放置工作,从而保证设备可以适应多环境多角度上的原料的夹取和放置,解决人工进行上下料存在一定安全以及生产效率较低,装夹精度无法保证影响产品质量的问题。
附图说明
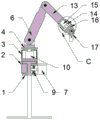
图1为本实用新型的一种数控CNC自动上下料机器人一角度的立体结构示意图;
图2为图1中A处的局部放大图;
图3为图1中B处的局部放大图;
图4为本实用新型的一种数控CNC自动上下料机器人的剖面示意图;
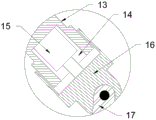
图5为图4中C处的局部放大图;
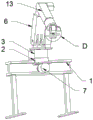
图6为本实用新型的一种数控CNC自动上下料机器人的另一角度的立体结构示意图;
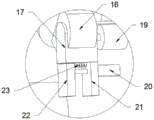
图7为图6中D处的局部放大图。
图中标号为:
1、滑道;2、滑板;3、旋转外箱;4、旋转底座;5、旋转电机一;6、连接杆一;7、运动电机;8、齿轮轨道;9、运动齿轮;10、固定旋转气缸;11、限位槽;12、限位柱;13、连接杆二;14、放置槽;15、活动旋转气缸;16、旋转套筒;17、夹具底座;18、旋转电机二;19、旋转电机三;20、夹紧气缸;21、固定夹爪;22、活动夹爪;23、辅助弹簧。
具体实施方式
以下描述用于揭露本实用新型以使本领域技术人员能够实现本实用新型。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
参照图1-7所示,一种数控CNC自动上下料机器人,包括滑道1,滑道1下表面的前后两端均固定连接有支撑腿,滑道1上滑动连接有滑板2,滑板2左右两侧均开设有滑槽,左侧滑槽的下侧表面开设有齿轮轨道8,滑板2的左侧表面通过电机底座固定连接有运动电机7,运动电机7的输出端固定连接有运动齿轮9,运动齿轮9与齿轮轨道8啮合,在运动电机7的作用下带动运动齿轮9在齿轮轨道8上运动,从而带动可以进行远距离的的工作,滑板2上表面固定连接有旋转外箱3和固定旋转气缸10,固定旋转气缸10带动设备进行旋转保证设备在前后方向以及左右方向上均可以进行工作,固定旋转气缸10位于旋转外箱3内部,固定旋转气缸10的输出端贯穿旋转外箱3的顶部,并固定连接有旋转底座4,旋转外箱3的上端开设有限位槽11,限位槽11呈环形,旋转底座4下表面固定连接有限位柱12,通过限位柱12和限位槽11配合使用,从而保证旋转底座4的运动轨迹,限位柱12位于限位槽11内,限位柱12周表面与限位槽11的内侧壁抵接,旋转底座4上端通过销栓铰接有连接杆一6,旋转底座4上表面固定连接有旋转电机一5,旋转电机一5的输出端与连接杆一6的前侧表面固定连接,旋转电机一5带动连接杆一6进行旋转运动。
连接杆一6远离旋转电机一5的一端通过销栓铰接有连接杆二13,连接杆一6远离旋转电机一5一端的前侧表面固定连接有旋转电机二18,旋转电机二18的输出端与连接杆二13的前侧表面固定连接,连接杆二13远离旋转电机二18的一端开设有放置槽14,放置槽14底部固定连接有活动旋转气缸15,连接杆远离旋转电机二18的一端转动连接有旋转套筒16,活动旋转气缸15的输出端与旋转套筒16侧面固定连接,活动旋转气缸15带动旋转套筒16进行旋转,从而带动固定夹爪21和活动夹爪22进行旋转,从而实现物料的翻转,更利于上料。
旋转套筒16远离活动旋转气缸15的一端通过销栓铰接有夹具底座17,旋转套筒16的前侧表面固定连接有旋转电机三19,旋转电机三19的输出端与夹具底座17的前侧表面固定连接,夹具底座17的下表面固定连接有固定夹爪21,固定夹爪21的前侧表面固定连接有夹紧气缸20,夹紧气缸20输出端贯穿固定夹爪21,并铰接有活动夹爪22,活动夹爪22的前侧表面的上端固定连接有辅助弹簧23,辅助弹簧23位于夹紧气缸20的输出端的上方,辅助弹簧23远离活动夹爪22的一端与固定夹爪21的后侧表面固定连接,打开夹紧气缸20,牵引活动夹爪22向固定夹爪21方向运动,当进行物料夹持时,辅助弹簧23处于压缩状态,对活动夹爪22上端有向外的作用力,从而更利于物料的夹紧。
本实用新型的工作原理及使用流程:
在使用时,在运动电机7的作用下带动运动齿轮9在齿轮轨道8上运动,从而带动整个设备实现远距离的送料,通过旋转电机一5、旋转电机二18和旋转电机三19控制连接杆一6、连接杆二13和夹具底座17在上下和左右方向上的移动,配合固定旋转气缸10和活动旋转气缸15,从而使得设备可以进行前后以及左右方向的旋转工作,在夹紧气缸20的作用下,通过带动活动夹爪22,从而实现生产原料的夹取和放置工作,从而保证设备可以适应多环境多角度上的原料的夹取和放置。
以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型的范围内。本实用新型要求的保护范围由所附的权利要求书及其等同物界定。
Claims (7)
1.一种数控CNC自动上下料机器人,其特征在于,包括滑道(1),所述滑道(1)下表面的前后两端均固定连接有支撑腿,所述滑道(1)上滑动连接有滑板(2),所述滑板(2)左右两侧均开设有滑槽,左侧所述滑槽的下侧表面开设有齿轮轨道(8),所述滑板(2)的左侧表面通过电机底座固定连接有运动电机(7),所述运动电机(7)的输出端固定连接有运动齿轮(9),所述运动齿轮(9)与齿轮轨道(8)啮合,所述滑板(2)上表面固定连接有旋转外箱(3)和固定旋转气缸(10),所述固定旋转气缸(10)位于旋转外箱(3)内部,所述固定旋转气缸(10)的输出端贯穿旋转外箱(3)的顶部,并固定连接有旋转底座(4),所述旋转外箱(3)的上端开设有限位槽(11)。
2.根据权利要求1所述的一种数控CNC自动上下料机器人,其特征在于:所述旋转底座(4)下表面固定连接有限位柱(12),所述限位柱(12)位于限位槽(11)内,所述旋转底座(4)上端通过销栓铰接有连接杆一(6),所述旋转底座(4)上表面固定连接有旋转电机一(5),所述旋转电机一(5)的输出端与连接杆一(6)的前侧表面固定连接。
3.根据权利要求2所述的一种数控CNC自动上下料机器人,其特征在于:所述连接杆一(6)远离旋转电机一(5)的一端通过销栓铰接有连接杆二(13),所述连接杆一(6)远离旋转电机一(5)一端的前侧表面固定连接有旋转电机二(18),所述旋转电机二(18)的输出端与连接杆二(13)的前侧表面固定连接。
4.根据权利要求3所述的一种数控CNC自动上下料机器人,其特征在于:所述连接杆二(13)远离旋转电机二(18)的一端开设有放置槽(14),所述放置槽(14)底部固定连接有活动旋转气缸(15),所述连接杆二远离旋转电机二(18)的一端转动连接有旋转套筒(16),所述活动旋转气缸(15)的输出端与旋转套筒(16)侧面固定连接。
5.根据权利要求4所述的一种数控CNC自动上下料机器人,其特征在于:所述旋转套筒(16)远离活动旋转气缸(15)的一端通过销栓铰接有夹具底座(17),所述旋转套筒(16)的前侧表面固定连接有旋转电机三(19),所述旋转电机三(19)的输出端与夹具底座(17)的前侧表面固定连接。
6.根据权利要求5所述的一种数控CNC自动上下料机器人,其特征在于:所述夹具底座(17)的下表面固定连接有固定夹爪(21),所述固定夹爪(21) 的前侧表面固定连接有夹紧气缸(20),所述夹紧气缸(20)输出端贯穿固定夹爪(21),并铰接有活动夹爪(22)。
7.根据权利要求6所述的一种数控CNC自动上下料机器人,其特征在于:所述活动夹爪(22)的前侧表面的上端固定连接有辅助弹簧(23),所述辅助弹簧(23)远离活动夹爪(22)的一端与固定夹爪(21)的后侧表面固定连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122091539.0U CN215847180U (zh) | 2021-09-01 | 2021-09-01 | 一种数控cnc自动上下料机器人 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202122091539.0U CN215847180U (zh) | 2021-09-01 | 2021-09-01 | 一种数控cnc自动上下料机器人 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN215847180U true CN215847180U (zh) | 2022-02-18 |
Family
ID=80246376
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202122091539.0U Active CN215847180U (zh) | 2021-09-01 | 2021-09-01 | 一种数控cnc自动上下料机器人 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN215847180U (zh) |
-
2021
- 2021-09-01 CN CN202122091539.0U patent/CN215847180U/zh active Active
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN209080851U (zh) | 一种工件翻转夹持机构 | |
| CN208614345U (zh) | 一种数控钻铣床翻转定位装置 | |
| CN203610684U (zh) | 一种车床自动上下料机械手 | |
| CN110449955B (zh) | 一种带料盘的全自动立式加工中心 | |
| CN110883595A (zh) | 一种机械加工用定装夹具 | |
| CN107913929B (zh) | 一种管端生产线及其使用方法 | |
| CN215847180U (zh) | 一种数控cnc自动上下料机器人 | |
| CN211517130U (zh) | 自动装夹机械手 | |
| CN217097806U (zh) | 一种自动送料机械手 | |
| CN216326184U (zh) | 一种自动翻转型机器人焊接变位机 | |
| CN215363723U (zh) | 一种物料转运机械手 | |
| CN213290287U (zh) | 一种机械加工用的圆盘状工件下料智能机械手 | |
| CN211842039U (zh) | 一种机械手 | |
| CN210756664U (zh) | 一种平行双主轴机床的上下料机械手 | |
| CN203281992U (zh) | 一种双向双工位攻丝机 | |
| CN207548305U (zh) | 一种数控铣床一拖二上下料机构 | |
| CN217702542U (zh) | 一种对两台机床上料取料的一拖二机械手 | |
| CN215788478U (zh) | 一种多种机床复合加工时的机械手平移装置 | |
| CN213917262U (zh) | 一种数控机床送料装置 | |
| CN219026689U (zh) | 一种阀门加工用加工夹装夹具 | |
| CN218947718U (zh) | 一种机器人机械臂顶端夹爪结构 | |
| CN215432732U (zh) | 一种数控机床用旋转式送料装置 | |
| CN113211415B (zh) | 一种用于人工智能作业的机械手 | |
| CN216634382U (zh) | 一种智能挂取件机械手 | |
| CN214110430U (zh) | 一种具备防滑功能用五金加工机械爪 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |