CN215711451U - 建筑预制墙板转运机器 - Google Patents
建筑预制墙板转运机器 Download PDFInfo
- Publication number
- CN215711451U CN215711451U CN202120255841.2U CN202120255841U CN215711451U CN 215711451 U CN215711451 U CN 215711451U CN 202120255841 U CN202120255841 U CN 202120255841U CN 215711451 U CN215711451 U CN 215711451U
- Authority
- CN
- China
- Prior art keywords
- assembly
- wheel
- building
- platform
- wall panel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000463 material Substances 0.000 claims description 27
- 230000001360 synchronised effect Effects 0.000 claims description 12
- 230000000712 assembly Effects 0.000 claims description 10
- 238000000429 assembly Methods 0.000 claims description 10
- 230000033001 locomotion Effects 0.000 claims description 6
- 239000000956 alloy Substances 0.000 claims description 5
- 229910045601 alloy Inorganic materials 0.000 claims description 5
- 239000003638 chemical reducing agent Substances 0.000 claims description 4
- 230000000694 effects Effects 0.000 abstract description 4
- 230000032258 transport Effects 0.000 description 36
- 238000004519 manufacturing process Methods 0.000 description 9
- 238000000034 method Methods 0.000 description 4
- 230000001174 ascending effect Effects 0.000 description 3
- 239000004567 concrete Substances 0.000 description 3
- 238000009434 installation Methods 0.000 description 3
- 238000010276 construction Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000009435 building construction Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 238000009417 prefabrication Methods 0.000 description 1
- 239000011150 reinforced concrete Substances 0.000 description 1
- 230000001932 seasonal effect Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
Images

Abstract
本实用新型涉及建筑墙板转运技术领域,尤其是建筑预制墙板转运机器,在所述底盘总成的底部前后两端分别安装有前轮总成与后轮总成,在所述底盘总成中部的中心安装腔内水平设置有一行星轮系,在所述底盘总成的上方设有一旋转平台,所述旋转平台的中心底部与所述行星轮系的行星架相固连,所述行星轮系的外齿圈与所述底盘总成相对固定设置,在所述行星轮系的下方的中心安装腔内固定安装有太阳轮驱动机构,在所述旋转平台的上方设有一升降转运平台,所述升降转运平台与所述旋转平台之间设有一升降缸组。本机器的转弯调节半径较小,能够有效地适用于车间内部空间不充裕的工况环境下实现快速的转运效果,转弯调节效率高。
Description
技术领域
本实用新型涉及建筑墙板转运技术领域,特别涉及一种应用在建筑预制墙板生产完成后出库过程中实现墙板快速转运的机械结构,尤其是建筑预制墙板转运机器。
背景技术
建筑预制墙板又称为预制混凝土墙板,其主要是指在预制厂内预先加工制成供建筑装配用的加筋混凝土板型构件,也简称墙板或壁板。由于采用预制混凝土墙板建造装配式大板建筑,可以提高工厂化、机械化施工程度,减少现场湿作业,节约现场用工,克服季节影响,缩短建筑施工周期。因此,几年来越来越多的建筑施工的过程中使用建筑预制墙板来代替混凝土现浇结构。
由于建筑预制墙板的整体尺寸较大且重量较重,因此在其生产完毕后向外出库运输时,通常需要将其由生产线上向运输设备上进行转运。目前主要通过叉车或一些平板车辆进行转运。
但是现有的转运机械在进行建筑预制墙板的转运的过程中主要存在三个方面的不足之处,其一是:目前现有的转运机械通常在转运的过程中转角半径过大,由于建筑预制墙板的尺寸较大,当在中小型的生产车间的狭小的空间内进行转角时操作不灵活;其二是:现有的转运机械在实现转运衔接导料的过程中存在容易出现导料干涉,容易出现建筑预制墙板边沿碰撞受损的情况;其三是:现有的转运设备在转运建筑预制墙板后无法有效地实现建筑预制墙板的整齐对整,建筑预制墙板转移至运输设备上之后存在摆放杂乱的情况。
实用新型内容
本实用新型为解决上述技术问题之一,所采用的技术方案是:建筑预制墙板转运机器,包括一底盘总成,在所述底盘总成的底部安装有电源总成,所述电源总成上安装有与遥控手柄配合的发射器,所述电源总成通过遥控手柄控制其电路的通断,在所述底盘总成的底部前后两端分别安装有前轮总成与后轮总成,在所述底盘总成中部的中心安装腔内水平设置有一行星轮系,在所述底盘总成的上方设有一旋转平台,所述旋转平台的中心底部与所述行星轮系的行星架相固连,所述行星轮系的外齿圈与所述底盘总成相对固定设置,在所述行星轮系的下方的中心安装腔内固定安装有太阳轮驱动机构,所述太阳轮驱动机构用于驱动所述行星轮系的太阳轮旋转,在所述旋转平台的上方设有一升降转运平台,所述升降转运平台与所述旋转平台之间设有一升降缸组,在所述升降转运平台的一端顶部固定安装有一推料组件,所述升降转运平台上用于承载待转运的建筑预制墙板。
优选地,在所述底盘总成的两侧分别对称安装有调位扶手。
优选地,所述升降缸组有四个分别设置在所述旋转平台顶部四角处的同步电缸组成,各所述同步电缸为同步运动,各所述同步电缸的缸体的底部与所述旋转平台顶部固连、活塞杆的顶部与所述升降转运平台的底部固连,所述升降缸组的运动有遥控手柄进行遥控控制。
优选地,所述前轮总成有两个对称设置的前轮组件组成,各所述前轮组件均为单独驱动控制。
优选地,所述后轮总成有两个对称设置的后轮组件组成,各所述后轮组件均为单独驱动控制。
优选地,所述前轮组件与所述后轮组件的结构相同且均为车轮动力组件结构,所述车轮动力组件结构包括一固定安装在所述底盘总成底部的固定轮架,在所述固定轮架活动安装有一轮轴,在所述轮轴的外端固定安装有一耐磨驱动车轮,在所述轮轴的内端固定连接有一带有减速器的驱动步进电机,所述驱动步进电机通过电机架固定安装在所述底盘总成的底部,所述驱动步进电机由遥控手柄控制其转向和转速。
优选地,所述行星轮系包括所述太阳轮、所述外齿圈,在所述太阳轮与所述外齿圈之间均布设置有若干个行星轮,各所述行星轮均通过行星架固连,所述外齿圈相对于底盘总成固定设置,所述太阳轮作为原动力输入,所述行星架为合金行星架且其顶部与所述旋转平台底部固定安装连接。
优选地,所述太阳轮驱动机构包括一固定安装在所述中心安装腔底部的大扭矩驱动电机,所述大扭矩驱动电机的电机轴与所述太阳轮的轴体相固连。
优选地,所述推料组件包括一推料板,所述推料板的外端固定安装有一推料缸组,所述推料缸组固定安装在所述升降转运平台的顶部。
优选地,所述推料缸组包括两水平设置的多级伺服电动缸,各所述多级伺服电动缸的缸体均固定安装在所述升降转运平台的顶部、活塞杆的自由端均固定安装在所述推料板上,各所述多级伺服电动缸为同步运动且通过遥控手柄控制其同步伸缩。
本实用新型的有益效果体现在:
1、本机器能够实现高效的向厂外运输设备上转运车间内的建筑预制墙板,操作快捷、方便;
2、本机器的转弯调节半径较小,能够有效地适用于车间内部空间不充裕的工况环境下实现快速的转运效果,转弯调节效率高;
3、本机器在进行承接建筑预制墙板时可以通过控制升降缸组来实现对升降转运平台的调位,从而使其配合实现当前需要转运操作的高度调节,通用性强;
4、本机器转运后能够通过升降缸组配合推料组件实现向运输车辆上推送建筑预制墙板,保证建筑预制墙板的整齐的向车上转移。
附图说明
为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部件一般由类似的附图标记标识。附图中,各元件或部件并不一定按照实际的比例绘制。
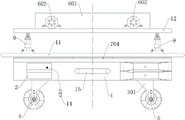
图1为本实用新型的主视结构示意图。
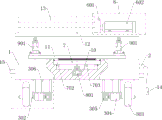
图2为本实用新型的侧视局部内部结构示意图。
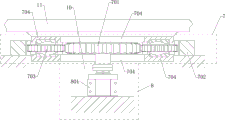
图3为本实用新型的局部放大结构示意图。
图4为本实用新型的行星轮系的结构原理图。
图中,1、底盘总成;2、电源总成;3、车轮动力组件结构;301、固定轮架;302、轮轴;303、耐磨驱动车轮;304、减速器;305、驱动步进电机;306、电机架;4、前轮总成;5、后轮总成;6、推料组件;601、推料板;602、多级伺服电动缸;7、行星轮系;701、太阳轮;702、外齿圈;703、行星轮;704、行星架;8、太阳轮驱动机构;801、大扭矩驱动电机;9、升降缸组;901、同步电缸;10、中心安装腔;11、旋转平台;12、升降转运平台;13、建筑预制墙板;14、遥控手柄;15、调位扶手。
具体实施方式
下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
如图1-4中所示,建筑预制墙板转运机器,包括一底盘总成1,在所述底盘总成1的底部安装有电源总成2,所述电源总成2上安装有与遥控手柄14配合的接收器,所述电源总成2通过遥控手柄14控制其电路的通断,在所述底盘总成1的底部前后两端分别安装有前轮总成4与后轮总成5,在所述底盘总成1中部的中心安装腔10内水平设置有一行星轮系7,在所述底盘总成1的上方设有一旋转平台11,所述旋转平台11的中心底部与所述行星轮系7的行星架704相固连,所述行星轮系7的外齿圈702与所述底盘总成1相对固定设置,在所述行星轮系7的下方的中心安装腔10内固定安装有太阳轮驱动机构8,所述太阳轮驱动机构8用于驱动所述行星轮系7的太阳轮701旋转,在所述旋转平台11的上方设有一升降转运平台12,所述升降转运平台12与所述旋转平台11之间设有一升降缸组9,在所述升降转运平台12的一端顶部固定安装有一推料组件6,所述升降转运平台12上用于承载待转运的建筑预制墙板13。
整个建筑预制墙板转运机器在建筑预制墙板13的生产车间内进行使用时,需要先将建筑预制墙板转运机器移动至需要向外转运的建筑预制墙板13的附近,使得建筑预制墙板转运机器的升降转运平台12与当前车间内的建筑预制墙板13的生产线平台相平齐或者略低于生产线平台,此时通过生产线上的搬运机械手或者人工搬运将建筑预制墙板13转移到升降转运平台12上,升降转运平台12根据需要放置合适数量的相互叠加放置的建筑预制墙板13。
遥控手柄14控制对应的前轮总成4、后轮总成5中的车轮动力组件结构3按需运动,当出现需要转弯的情况时,操作工人需要控制遥控手柄14的对应按钮实现整个机器的不同程序的转弯。
由于本机器设置的各个车轮动力组件结构3均为单独驱动,使得本机器的转弯调节半径较小,能够有效地适用于车间内部空间不充裕的工况环境下实现快速的转运效果,转弯调节效率高。
当运动至厂外指定的运输车辆的附近时,根据需要调节各个车轮动力组件结构3按需运动来实现初步调位旋转,当需要精确的调位时直接控制太阳轮驱动机构8运动来带动行星轮系7工作,从而带动旋转平台11按需旋转适当的角度,在此可以精确的控制,最终调位后控制升降缸组9带动其顶部的升降转运平台12运动至指定的高度,使得其顶部与当前的运输车辆的车厢平齐或者略高于车厢的底板,从而更便捷的便于推料组件6将承托在升降转运平台12上的建筑预制墙板13向运输车的车厢内转移推送。
优选地,在所述底盘总成1的两侧分别对称安装有调位扶手15。
设置调位扶手15的目的主要是操作人员在两侧便于扶持整个装置,实现边控制机器行进,边掌握和观察周边的路况和情况,同时设置调位扶手15便于抓握发力。
优选地,所述升降缸组9有四个分别设置在所述旋转平台11顶部四角处的同步电缸901组成,各所述同步电缸901为同步运动,各所述同步电缸901的缸体的底部与所述旋转平台11顶部固连、活塞杆的顶部与所述升降转运平台12的底部固连,所述升降缸组9的运动有遥控手柄14进行遥控控制。
当控制同步电缸901升降时可以更好地保证整个升降转运平台12的稳定升降,从而实现带动其上的建筑预制墙板13的稳定升降,便于转运时的高度调位
优选地,所述前轮总成4有两个对称设置的前轮组件组成,各所述前轮组件均为单独驱动控制。
优选地,所述后轮总成5有两个对称设置的后轮组件组成,各所述后轮组件均为单独驱动控制。
优选地,所述前轮组件与所述后轮组件的结构相同且均为车轮动力组件结构3,所述车轮动力组件结构3包括一固定安装在所述底盘总成1底部的固定轮架301,在所述固定轮架301活动安装有一轮轴302,在所述轮轴302的外端固定安装有一耐磨驱动车轮303,在所述轮轴302的内端固定连接有一带有减速器304的驱动步进电机305,所述驱动步进电机305通过电机架306固定安装在所述底盘总成1的底部,所述驱动步进电机305由遥控手柄14控制其转向和转速。
在此采用四轮单独驱动的方式,能够提供更强的动力,同时也可以保证在转向时的更小的转向半径,通过控制不同轮组的转动与否来实现带动整个机器的快速的转向以及转向速度,操作更加便捷。
优选地,所述行星轮系7包括所述太阳轮701、所述外齿圈702,在所述太阳轮701与所述外齿圈702之间均布设置有若干个行星轮703,各所述行星轮703均通过行星架704固连,所述外齿圈702相对于底盘总成1固定设置,所述太阳轮701作为原动力输入,所述行星架704为合金行星架704且其顶部与所述旋转平台11底部固定安装连接。
在此将太阳轮701作为主动力输入,能够保证其对各个行星轮703以及行星架704的驱动,从而保证与行星架704相固连的旋转平台11按需转动,从而保证后续的精准调位旋转。
优选地,所述太阳轮驱动机构8包括一固定安装在所述中心安装腔10底部的大扭矩驱动电机801,所述大扭矩驱动电机801的电机轴与所述太阳轮701的轴体相固连。
大扭矩驱动电机801在带动太阳轮701转动时可以起到更好地扭力,提供充足的动力,保证旋转运动的流畅性。
优选地,所述推料组件6包括一推料板601,所述推料板601的外端固定安装有一推料缸组,所述推料缸组固定安装在所述升降转运平台12的顶部。
优选地,所述推料缸组包括两水平设置的多级伺服电动缸602,各所述多级伺服电动缸602的缸体均固定安装在所述升降转运平台12的顶部、活塞杆的自由端均固定安装在所述推料板601上,各所述多级伺服电动缸602为同步运动且通过遥控手柄14控制其同步伸缩。
当本机器运转至运输车辆指定的位置并调节好卸料高度后,需要通过遥控手柄14控制两个多级伺服电动缸602同步运动,从而带动置于升降转运平台12的顶部的建筑预制墙板13向运输车厢板上转移,平稳推移可以保证转运的建筑预制墙板13的整齐性。
工作原理:
机器使用前需要进行整机的检查,并将整个机器的电源打开,实现整机的启动;整个建筑预制墙板转运机器在建筑预制墙板13的生产车间内进行使用时,需要先将建筑预制墙板转运机器移动至需要向外转运的建筑预制墙板13的附近,使得建筑预制墙板转运机器的升降转运平台12与当前车间内的建筑预制墙板13的生产线平台相平齐或者略低于生产线平台,此时通过生产线上的搬运机械手或者人工搬运将建筑预制墙板13转移到升降转运平台12上,升降转运平台12根据需要放置合适数量的相互叠加放置的建筑预制墙板13。遥控手柄14控制对应的前轮总成4、后轮总成5中的车轮动力组件结构3按需运动,当出现需要转弯的情况时,操作工人需要控制遥控手柄14的对应按钮实现整个机器的不同程序的转弯。由于本机器设置的各个车轮动力组件结构3均为单独驱动,使得本机器的转弯调节半径较小,能够有效地适用于车间内部空间不充裕的工况环境下实现快速的转运效果,转弯调节效率高。当运动至厂外指定的运输车辆的附近时,根据需要调节各个车轮动力组件结构3按需运动来实现初步调位旋转,当需要精确的调位时直接控制太阳轮驱动机构8运动来带动行星轮系7工作,从而带动旋转平台11按需旋转适当的角度,在此可以精确的控制,最终调位后控制升降缸组9带动其顶部的升降转运平台12运动至指定的高度,使得其顶部与当前的运输车辆的车厢平齐或者略高于车厢的底板,从而更便捷的便于推料组件6将承托在升降转运平台12上的建筑预制墙板13向运输车的车厢内转移推送。
以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中;对于本技术领域的技术人员来说,对本实用新型实施方式所做出的任何替代改进或变换均落在本实用新型的保护范围内。
本实用新型未详述之处,均为本技术领域技术人员的公知技术。
Claims (10)
1.建筑预制墙板转运机器,包括一底盘总成,在所述底盘总成的底部安装有电源总成,所述电源总成通过遥控手柄控制其电路的通断,在所述底盘总成的底部前后两端分别安装有前轮总成与后轮总成,其特征在于:在所述底盘总成中部的中心安装腔内水平设置有一行星轮系,在所述底盘总成的上方设有一旋转平台,所述旋转平台的中心底部与所述行星轮系的行星架相固连,所述行星轮系的外齿圈与所述底盘总成相对固定设置,在所述行星轮系的下方的中心安装腔内固定安装有太阳轮驱动机构,所述太阳轮驱动机构用于驱动所述行星轮系的太阳轮旋转,在所述旋转平台的上方设有一升降转运平台,所述升降转运平台与所述旋转平台之间设有一升降缸组,在所述升降转运平台的一端顶部固定安装有一推料组件,所述升降转运平台上用于承载待转运的建筑预制墙板。
2.根据权利要求1所述的建筑预制墙板转运机器,其特征在于:在所述底盘总成的两侧分别对称安装有调位扶手。
3.根据权利要求2所述的建筑预制墙板转运机器,其特征在于:所述升降缸组有四个分别设置在所述旋转平台顶部四角处的同步电缸组成,各所述同步电缸为同步运动,各所述同步电缸的缸体的底部与所述旋转平台顶部固连、活塞杆的顶部与所述升降转运平台的底部固连,所述升降缸组的运动有遥控手柄进行遥控控制。
4.根据权利要求3所述的建筑预制墙板转运机器,其特征在于:所述前轮总成有两个对称设置的前轮组件组成,各所述前轮组件均为单独驱动控制。
5.根据权利要求4所述的建筑预制墙板转运机器,其特征在于:所述后轮总成有两个对称设置的后轮组件组成,各所述后轮组件均为单独驱动控制。
6.根据权利要求5所述的建筑预制墙板转运机器,其特征在于:所述前轮组件与所述后轮组件的结构相同且均为车轮动力组件结构,所述车轮动力组件结构包括一固定安装在所述底盘总成底部的固定轮架,在所述固定轮架活动安装有一轮轴,在所述轮轴的外端固定安装有一耐磨驱动车轮,在所述轮轴的内端固定连接有一带有减速器的驱动步进电机,所述驱动步进电机通过电机架固定安装在所述底盘总成的底部,所述驱动步进电机由遥控手柄控制其转向和转速。
7.根据权利要求6所述的建筑预制墙板转运机器,其特征在于:所述行星轮系包括所述太阳轮、所述外齿圈,在所述太阳轮与所述外齿圈之间均布设置有若干个行星轮,各所述行星轮均通过行星架固连,所述外齿圈相对于底盘总成固定设置,所述太阳轮作为原动力输入,所述行星架为合金行星架且其顶部与所述旋转平台底部固定安装连接。
8.根据权利要求7所述的建筑预制墙板转运机器,其特征在于:所述太阳轮驱动机构包括一固定安装在所述中心安装腔底部的大扭矩驱动电机,所述大扭矩驱动电机的电机轴与所述太阳轮的轴体相固连。
9.根据权利要求8所述的建筑预制墙板转运机器,其特征在于:所述推料组件包括一推料板,所述推料板的外端固定安装有一推料缸组,所述推料缸组固定安装在所述升降转运平台的顶部。
10.根据权利要求9所述的建筑预制墙板转运机器,其特征在于:所述推料缸组包括两水平设置的多级伺服电动缸,各所述多级伺服电动缸的缸体均固定安装在所述升降转运平台的顶部、活塞杆的自由端均固定安装在所述推料板上,各所述多级伺服电动缸为同步运动且通过遥控手柄控制其同步伸缩。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120255841.2U CN215711451U (zh) | 2021-01-29 | 2021-01-29 | 建筑预制墙板转运机器 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202120255841.2U CN215711451U (zh) | 2021-01-29 | 2021-01-29 | 建筑预制墙板转运机器 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN215711451U true CN215711451U (zh) | 2022-02-01 |
Family
ID=80011891
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202120255841.2U Expired - Fee Related CN215711451U (zh) | 2021-01-29 | 2021-01-29 | 建筑预制墙板转运机器 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN215711451U (zh) |
-
2021
- 2021-01-29 CN CN202120255841.2U patent/CN215711451U/zh not_active Expired - Fee Related
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN205220756U (zh) | 电动载物爬楼机 | |
| CN103569877B (zh) | 小型吊机 | |
| CN108481000A (zh) | 全自动开卷矫平激光切割落料自动堆垛智能制造生产线 | |
| CN110282578A (zh) | 航天器大型舱段总装用可升降式多功能支架车 | |
| CN101992291A (zh) | 运锭小车 | |
| CN200942788Y (zh) | 机械装卸式运坯车 | |
| CN201330127Y (zh) | 一种抓取燃料组件用的装卸料机 | |
| CN215711451U (zh) | 建筑预制墙板转运机器 | |
| CN205366782U (zh) | 自动拣选机器人 | |
| CN202848985U (zh) | 支臂式四驱液压电动叉车 | |
| CN112209004A (zh) | 一种发动机缸盖用水平回转装置 | |
| CN205187182U (zh) | 一种墙体运输装置 | |
| CN207891003U (zh) | 一种位置可调的升降机 | |
| CN214030394U (zh) | 一种发动机缸盖用水平回转装置 | |
| CN210260338U (zh) | 一种混凝土预制构件模具堆垛装置 | |
| CN104670940A (zh) | 一种板材供料机构 | |
| CN209098095U (zh) | 一种升降机 | |
| CN201862733U (zh) | 运锭小车 | |
| CN214455110U (zh) | 一种加气砖自动堆垛装置 | |
| CN208200271U (zh) | 可自行行走搬运工件的台车 | |
| CN112141721A (zh) | 一种混凝土预制构件模具堆垛装置 | |
| CN206065579U (zh) | 一种多支撑电机驱动的回转工作升降台 | |
| CN210634441U (zh) | 一种装配式建筑用大型拖车 | |
| CN217837377U (zh) | 一种新型顶升移栽机 | |
| CN218664894U (zh) | 轿厢托盘往复式提升机 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20220201 |