CN212125458U - Marine waste cleaning robot - Google Patents
Marine waste cleaning robot Download PDFInfo
- Publication number
- CN212125458U CN212125458U CN202020478744.5U CN202020478744U CN212125458U CN 212125458 U CN212125458 U CN 212125458U CN 202020478744 U CN202020478744 U CN 202020478744U CN 212125458 U CN212125458 U CN 212125458U
- Authority
- CN
- China
- Prior art keywords
- garbage
- box body
- fixedly connected
- rod
- collection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Landscapes
- Filtration Of Liquid (AREA)
Abstract
The utility model belongs to the technical field of marine waste cleaning, in particular to a marine waste cleaning robot, which aims at manually salvaging a manually-driven cleaning boat when the existing cleaning mode is multiple, thereby greatly increasing the labor force problem, and the proposal is provided, which comprises a collecting box body, wherein both sides of the collecting box body are fixedly provided with a driving water wheel, the top of the collecting box body is fixedly connected with a waste collecting cylinder, both sides of the waste collecting cylinder are fixedly connected with a buoyancy plate, the top of the waste collecting cylinder is fixedly connected with a waterproof shell, a camera, a wireless controller and a storage battery are arranged in the waterproof shell, a waste blocking net is fixedly connected in the waste collecting cylinder, a worm is rotatably arranged on the waste blocking net, a water suction fan is fixedly sleeved outside the worm, and the top of the waste collecting cylinder is fixedly connected with a motor, the utility model has simple structure and convenient operation, and can perform non-manual cleaning on the sea surface, and the garbage can be conveniently crushed and collected, and the labor is saved.
Description
Technical Field
The utility model relates to a marine waste clearance technical field especially relates to a marine waste clearance robot.
Background
The earth is a blue sky ball, wherein the ocean has 72% of area, and with the development of tourism industry, many areas develop seaside tourism, and the environmental management follows, wherein a lot of garbage floats on the sea surface, so that the serious pollution is caused to the ocean, the ecological balance is greatly damaged, and the ocean needs to be cleaned.
The cleaning boat is manually driven to carry out manual salvage in multiple existing cleaning modes, and labor force is greatly increased.
SUMMERY OF THE UTILITY MODEL
The utility model aims at solving the problem that the existing cleaning mode is manually salvaged by a manual driving cleaning boat in many times, greatly increasing the defects of labor force and providing a marine garbage cleaning robot.
In order to achieve the above purpose, the utility model adopts the following technical scheme:
a marine garbage cleaning robot comprises a collecting box body, wherein driving water wheels are fixedly arranged on two sides of the collecting box body, a garbage collecting barrel is fixedly connected to the top of the collecting box body, buoyancy plates are fixedly connected to two sides of the garbage collecting barrel, a waterproof shell is fixedly connected to the top of the garbage collecting barrel, a camera, a wireless controller and a storage battery are arranged in the waterproof shell, a garbage blocking net is fixedly connected in the garbage collecting barrel, a worm is rotatably arranged on the garbage blocking net, a water suction fan is fixedly sleeved on the outer side of the worm, a motor is fixedly connected to the top of the garbage collecting barrel, a crushing shaft is fixedly arranged on an output shaft of the motor and rotatably connected with the garbage collecting barrel, a worm wheel is fixedly sleeved on the outer side of the crushing shaft and meshed with the worm wheel, a garbage opening is formed in the inner wall of the bottom of the garbage collecting barrel, and a plurality of crushing cutters are fixedly arranged in the collecting box, the bottom of collecting the box body is rotated and is installed the transverse bar, longitudinal rotation installs the longitudinal rod in the collection box body, longitudinal rod and crushing shaft all with transverse bar looks adaptation, slidable mounting has the thrust plate in the collection box body, the top fixed mounting of longitudinal rod has the elliptical plate, the elliptical plate offsets with the thrust plate, the lopsidedness of collecting the box body is provided with the filter screen, filter screen and collection box body sliding connection, be provided with reciprocating mechanism on the collection box body, reciprocating mechanism and filter screen fixed connection, one side intercommunication of collecting the box body has the collecting pipe, be connected with on the collecting pipe and collect the net.
Preferably, the reciprocating mechanism comprises a transmission rod, a cam and an overturning rod, the transmission rod is rotatably connected with the garbage collection cylinder, the cam is fixedly installed at the bottom end of the transmission rod, one end of the overturning rod is rotatably connected with the eccentric position of the cam, and the other end of the overturning rod is rotatably connected with one side of the filter screen.
Preferably, the bottom fixed mounting of garbage collection section of thick bamboo has two bracing pieces, and two bracing pieces all with filter screen sliding connection, two bracing pieces are L type structure.
Preferably, the outer side of the crushing shaft is fixedly sleeved with a first chain wheel, the outer side of the transmission rod is fixedly sleeved with a second chain wheel, and the first chain wheel and the second chain wheel are meshed with the same chain
Preferably, one end of the worm is fixedly provided with a cleaning rod, and the cleaning rod is in contact with the garbage blocking net.
Preferably, the bottom ends of the crushing shaft and the longitudinal rod are respectively fixedly sleeved with a first bevel gear and a third bevel gear, the diameter of the third bevel gear is larger than that of the first bevel gear, two ends of the transverse rod are respectively fixedly sleeved with a second bevel gear, and the two second bevel gears are respectively meshed with the first bevel gear and the third bevel gear.
Preferably, one side of the thrust plate is fixedly connected with one end of a plurality of tension springs, and the other ends of the plurality of tension springs are fixedly connected with the inner wall of one side of the collection box body.
Preferably, one side of the garbage collection cylinder is fixedly connected with a horn mouth, and the bottom of the collection box body is fixedly connected with a protective shell.
Compared with the prior art, the utility model has the advantages of:
(1) according to the scheme, the two driving water wheels can help the garbage collection cylinder and the collection box body to move on the water surface, the camera can observe the sea surface, when garbage is found, the garbage collection cylinder and the collection box body are close to the garbage, the motor drives the crushing shaft to rotate, the crushing shaft drives the water suction fan to rotate through the worm wheel and the worm, the water suction fan can generate suction force on the garbage on the sea surface to suck the garbage into the garbage collection cylinder, and the garbage is blocked by the garbage blocking net to fall into the collection box body, so that the garbage is convenient to collect;
(2) according to the scheme, the longitudinal rod is driven to rotate by the crushing shaft through the first bevel gear, the two second bevel gears and the third bevel gear, the thrust plate is driven to reciprocate by the longitudinal rod through the cooperation of the elliptical plate and the tension spring, the garbage can be continuously pushed to the vicinity of the crushing cutter, and the crushing shaft drives the crushing cutter to rotate to crush the garbage, so that the garbage is conveniently crushed;
(3) according to the scheme, the crushed garbage is filtered by the filter screen and enters the collecting net through the collecting pipe, so that the garbage can be conveniently collected by crushing the garbage, and the bearing capacity is enlarged;
(4) according to the scheme, the crushing shaft drives the transmission rod to rotate through the first chain wheel, the second chain wheel and the chain, the transmission rod rotates, and the filter screen can be driven to shake back and forth through the cam and the turnover rod, so that the filtering effect is improved;
the utility model discloses simple structure, convenient operation can carry out non-artifical clearance to the sea, and is convenient for smash, collect rubbish, practices thrift the manpower.
Drawings
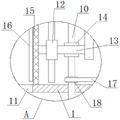
Fig. 1 is a schematic structural view of a marine garbage cleaning robot provided by the present invention;
fig. 2 is a schematic top view of the marine garbage cleaning robot according to the present invention;
fig. 3 is a schematic structural view of part a of the marine garbage cleaning robot provided by the present invention;
fig. 4 is a schematic structural view of part B of the marine garbage cleaning robot provided by the present invention;
fig. 5 is the utility model provides a thrust plate, elliptical plate, longitudinal rod and collection box body of marine waste cleaning robot's overlook connection structure sketch map.
In the figure: 1 garbage collection cylinder, 2 collection box bodies, 3 collection pipes, 4 collection nets, 5 waterproof cases, 6 wireless controllers, 7 storage batteries, 8 cameras, 9 motors, 10 crushing shafts, 11 garbage ports, 12 water suction fans, 13 worms, 14 worm gears, 15 garbage blocking nets, 16 cleaning rods, 17 chains, 18 first chain wheels, 19 transmission rods, 20 filter screens, 21 second chain wheels, 22 cams, 23 turning rods, 24 support rods, 25 thrust plates, 26 tension springs, 27 elliptical plates, 28 longitudinal rods, 29 transverse rods, 30 first bevel gears, 31 second bevel gears, 32 third bevel gears, 33 horn mouths, 34 buoyancy plates and 35 driving water wheels.
Detailed Description
The technical solutions in the embodiments of the present invention will be described clearly and completely with reference to the accompanying drawings in the embodiments of the present invention, and it is obvious that the described embodiments are only some embodiments of the present invention, not all embodiments.
Example one
Referring to fig. 1-5, a marine garbage cleaning robot comprises a collecting box body 2, driving water wheels 35 are fixedly arranged on both sides of the collecting box body 2, a garbage collecting cylinder 1 is fixedly connected to the top of the collecting box body 2, buoyancy plates 34 are fixedly connected to both sides of the garbage collecting cylinder 1, a waterproof case 5 is fixedly connected to the top of the garbage collecting cylinder 1, a camera 8, a wireless controller 6 and a storage battery 7 are arranged in the waterproof case 5, a garbage blocking net 15 is fixedly connected to the inside of the garbage collecting cylinder 1, a worm 13 is rotatably arranged on the garbage blocking net 15, a water suction fan 12 is fixedly sleeved on the outer side of the worm 13, a motor 9 is fixedly connected to the top of the garbage collecting cylinder 1, a crushing shaft 10 is fixedly arranged on an output shaft of the motor 9, the crushing shaft 10 is rotatably connected with the garbage collecting cylinder 1, a worm wheel 14 is fixedly sleeved on the outer side of the crushing shaft, the garbage collecting can comprises a garbage collecting barrel 1, a garbage opening 11 is formed in the inner wall of the bottom of the garbage collecting barrel 1, a plurality of crushing knives are fixedly installed at the bottom end of a crushing shaft 10 and extend into a collecting box body 2, a transverse rod 29 is rotatably installed at the bottom of the collecting box body 2, a longitudinal rod 28 is longitudinally rotatably installed in the collecting box body 2, the longitudinal rod 28 and the crushing shaft 10 are matched with the transverse rod 29, a thrust plate 25 is slidably installed in the collecting box body 2, an elliptical plate 27 is fixedly installed at the top end of the longitudinal rod 28, the elliptical plate 27 is abutted to the thrust plate 25, a filter screen 20 is obliquely arranged on one side of the collecting box body 2, the filter screen 20 is slidably connected with the collecting box body 2, a reciprocating mechanism is arranged on the collecting box body 2 and fixedly connected with the filter screen 20, a collecting pipe 3 is communicated with one side of the collecting box body 2, a collecting net 4 is connected to the collecting pipe, the thrust plate 25 is used for pushing the garbage to the vicinity of the crushing knife, and the filter screen 20 is used for filtering the crushed garbage into the collection screen 4.
In this embodiment, the reciprocating mechanism includes a transmission rod 19, a cam 22 and a turning rod 23, the transmission rod 19 is rotatably connected with the garbage collection can 1, the cam 22 is fixedly installed at the bottom end of the transmission rod 19, one end of the turning rod 23 is rotatably connected with the eccentric position of the cam 22, the other end of the turning rod 23 is rotatably connected with one side of the filter screen 20, and the transmission rod 19 rotates to drive the filter screen 20 to vibrate back and forth through the cam 22 and the turning rod 23.
In this embodiment, two support rods 24 are fixedly mounted at the bottom of the garbage can 1, the two support rods 24 are both connected with the filter screen 20 in a sliding manner, the two support rods 24 are both of an L-shaped structure, and the support rods 24 support the filter screen 20.
In this embodiment, the outer side of the crushing shaft 10 is fixedly sleeved with a first chain wheel 18, the outer side of the transmission rod 19 is fixedly sleeved with a second chain wheel 21, the first chain wheel 18 and the second chain wheel 21 are engaged with a same chain 17, and the crushing shaft 10 drives the transmission rod 19 to rotate through the first chain wheel 18, the second chain wheel 21 and the chain 17.
In this embodiment, a cleaning rod 16 is fixedly installed at one end of the worm 13, the cleaning rod 16 contacts with the garbage blocking net 15, the cleaning rod 16 cleans the garbage blocking net 15, and the garbage blocking net 15 is used for blocking garbage.
In this embodiment, the bottom ends of the crushing shaft 10 and the longitudinal rod 28 are respectively and fixedly sleeved with a first bevel gear 30 and a third bevel gear 32, the diameter of the third bevel gear 32 is larger than that of the first bevel gear 30, the two ends of the transverse rod 29 are respectively and fixedly sleeved with second bevel gears 31, the two second bevel gears 31 are respectively engaged with the first bevel gear 30 and the third bevel gear 32, the crushing shaft 10 drives the longitudinal rod 28 to rotate through the first bevel gear 30, the two second bevel gears 31 and the third bevel gear 32, and the rotating speed of the longitudinal rod 28 is reduced.
In this embodiment, one side fixedly connected with one end of a plurality of extension springs 26 of thrust plate 25, the other end of a plurality of extension springs 26 all with one side inner wall fixed connection of collection box body 2, extension spring 26 provides the pulling force that resets for thrust plate 25.
In this embodiment, one side fixedly connected with horn mouth 33 of garbage collection section of thick bamboo 1, the bottom fixedly connected with protective housing of collection box body 2, horn mouth 33 is convenient to absorb rubbish.
Example two
Referring to fig. 1-5, a marine garbage cleaning robot comprises a collecting box body 2, wherein both sides of the collecting box body 2 are fixedly provided with a driving water wheel 35, the top of the collecting box body 2 is fixedly connected with a garbage collecting barrel 1 through screws, both sides of the garbage collecting barrel 1 are fixedly connected with buoyancy plates 34 through screws, the top of the garbage collecting barrel 1 is fixedly connected with a waterproof shell 5 through screws, a camera 8, a wireless controller 6 and a storage battery 7 are arranged in the waterproof shell 5, a garbage blocking net 15 is fixedly connected in the garbage collecting barrel 1 through screws, a worm 13 is rotatably arranged on the garbage blocking net 15, a water absorbing fan 12 is fixedly sleeved on the outer side of the worm 13, the top of the garbage collecting barrel 1 is fixedly connected with a motor 9 through screws, a crushing shaft 10 is fixedly arranged on an output shaft of the motor 9 through welding, the crushing shaft 10 is rotatably connected with the garbage collecting barrel 1, the outer side of the crushing shaft 10 is fixedly sleeved with a worm wheel 14, a worm 13 is meshed with the worm wheel 14, the inner wall of the bottom of the garbage collecting cylinder 1 is provided with a garbage opening 11, the bottom end of the crushing shaft 10 extends to the inside of the collecting box body 2 and is fixedly provided with a plurality of crushing cutters by welding, the bottom of the collecting box body 2 is rotatably provided with a transverse rod 29, the collecting box body 2 is internally and longitudinally rotatably provided with a longitudinal rod 28, the longitudinal rod 28 and the crushing shaft 10 are matched with the transverse rod 29, the collecting box body 2 is internally and slidably provided with a thrust plate 25, the top end of the longitudinal rod 28 is fixedly provided with an elliptical plate 27 by welding, the elliptical plate 27 is abutted against the thrust plate 25, one side of the collecting box body 2 is obliquely provided with a filter screen 20, the filter screen 20 is in sliding connection with the collecting box body 2, the collecting box body 2 is provided with a reciprocating, the collecting pipe 3 is connected with a collecting net 4, the collecting net 4 is used for collecting garbage, the crushing shaft 10 can crush the garbage through a plurality of crushing knives, the thrust plate 25 is used for pushing the garbage to the vicinity of the crushing knives, and the filter screen 20 is used for filtering the crushed garbage into the collecting net 4.
In this embodiment, the reciprocating mechanism includes a transmission rod 19, a cam 22 and a turning rod 23, the transmission rod 19 is rotatably connected with the garbage collection can 1, the cam 22 is fixedly welded to the bottom end of the transmission rod 19, one end of the turning rod 23 is rotatably connected to the eccentric position of the cam 22, the other end of the turning rod 23 is rotatably connected to one side of the filter screen 20, and the transmission rod 19 rotates to drive the filter screen 20 to vibrate back and forth through the cam 22 and the turning rod 23.
In this embodiment, two bracing pieces 24 are installed through welded fastening in the bottom of garbage collection section of thick bamboo 1, and two bracing pieces 24 all with filter screen 20 sliding connection, and two bracing pieces 24 are L type structure, and bracing piece 24 plays the supporting role to filter screen 20.
In this embodiment, the outer side of the crushing shaft 10 is fixedly sleeved with a first chain wheel 18, the outer side of the transmission rod 19 is fixedly sleeved with a second chain wheel 21, the first chain wheel 18 and the second chain wheel 21 are engaged with a same chain 17, and the crushing shaft 10 drives the transmission rod 19 to rotate through the first chain wheel 18, the second chain wheel 21 and the chain 17.
In this embodiment, a cleaning rod 16 is fixedly installed at one end of the worm 13 by welding, the cleaning rod 16 contacts with the garbage blocking net 15, the cleaning rod 16 cleans the garbage blocking net 15, and the garbage blocking net 15 is used for blocking garbage.
In this embodiment, the bottom ends of the crushing shaft 10 and the longitudinal rod 28 are respectively and fixedly sleeved with a first bevel gear 30 and a third bevel gear 32, the diameter of the third bevel gear 32 is larger than that of the first bevel gear 30, the two ends of the transverse rod 29 are respectively and fixedly sleeved with second bevel gears 31, the two second bevel gears 31 are respectively engaged with the first bevel gear 30 and the third bevel gear 32, the crushing shaft 10 drives the longitudinal rod 28 to rotate through the first bevel gear 30, the two second bevel gears 31 and the third bevel gear 32, and the rotating speed of the longitudinal rod 28 is reduced.
In this embodiment, one side of thrust plate 25 passes through the one end of a plurality of extension springs 26 of screw fixed connection, and the other end of a plurality of extension springs 26 all passes through screw fixed connection with one side inner wall of collection box body 2, and extension spring 26 provides the pulling force that resets for thrust plate 25.
In this embodiment, one side of garbage collection section of thick bamboo 1 is through screw fixedly connected with horn mouth 33, and the bottom of collecting box body 2 is through screw fixedly connected with protective housing, and horn mouth 33 is convenient to absorb rubbish.
In the embodiment, when the device is used, the electrical equipment is connected with the storage battery 7 and the wireless controller 6, the storage battery 7 and the wireless controller 6 are connected with the wireless controller 6 through the wireless remote controller, the two driving water wheels 35 can help the garbage collection cylinder 1 and the collection box body 2 to move on the water surface, the camera 8 observes the sea surface, when garbage is found, the garbage collection cylinder 1 and the collection box body 2 are close to the garbage, the motor 9 is started, the motor 9 drives the crushing shaft 10 to rotate, the crushing shaft 10 drives the worm 13 to rotate through the worm wheel 14, the worm 13 drives the water absorption fan 12 to rotate, the water absorption fan 12 can generate suction force to the garbage on the sea surface to absorb the garbage into the garbage collection cylinder 1, the garbage is blocked by the garbage blocking net 15 to fall into the collection box body 2, the crushing shaft 10 drives the longitudinal rod 28 to rotate through the first bevel gear 30, the two second bevel gears 31 and the third bevel, the longitudinal rod 28 drives the elliptical plate 27 to rotate, the elliptical plate 27 rotates to extrude the thrust plate 25, the thrust plate 25 pushes garbage to the vicinity of the crushing cutter, under the action of the pulling force of the tension spring 26, the thrust plate 25 reciprocates to push the garbage to the vicinity of the crushing cutter continuously, the crushing shaft 10 drives the crushing cutter to rotate to crush the garbage, the crushed garbage is filtered by the filter screen 20 and enters the collection net 4 through the collection pipe 3, the garbage can be collected conveniently by crushing the garbage, the bearing capacity is enlarged, meanwhile, the crushing shaft 10 drives the transmission rod 19 to rotate through the first chain wheel 18, the second chain wheel 21 and the chain 17, the transmission rod 19 rotates to drive the filter screen 20 to vibrate back and forth through the cam 22 and the turnover rod 23, the filtering effect is improved, after the collection is completed, the motor 9 is stopped, the garbage can be continuously searched and collected, and after the collection of the garbage is completed, the garbage collection barrel 1 and the collection, the collection net 4 is disassembled to clean the garbage.
The above, only be the concrete implementation of the preferred embodiment of the present invention, but the protection scope of the present invention is not limited thereto, and any person skilled in the art is in the technical scope of the present invention, according to the technical solution of the present invention and the utility model, the concept of which is equivalent to replace or change, should be covered within the protection scope of the present invention.
Claims (8)
1. A marine garbage cleaning robot comprises a collecting box body (2), wherein driving water wheels (35) are fixedly arranged on two sides of the collecting box body (2), a garbage collecting barrel (1) is fixedly connected to the top of the collecting box body (2), buoyancy plates (34) are fixedly connected to two sides of the garbage collecting barrel (1), a waterproof shell (5) is fixedly connected to the top of the garbage collecting barrel (1), a camera (8), a wireless controller (6) and a storage battery (7) are arranged in the waterproof shell (5), the marine garbage cleaning robot is characterized in that a garbage blocking net (15) is fixedly connected in the garbage collecting barrel (1), a worm (13) is rotatably arranged on the garbage blocking net (15), a water suction fan (12) is fixedly sleeved on the outer side of the worm (13), a motor (9) is fixedly connected to the top of the garbage collecting barrel (1), and a crushing shaft (10) is fixedly arranged on an output shaft of the motor (9), crushing shaft (10) is connected with garbage collection cylinder (1) in a rotating way, the outside of crushing shaft (10) is fixedly sleeved with a worm wheel (14), a worm (13) is meshed with the worm wheel (14), a garbage opening (11) is formed in the inner wall of the bottom of the garbage collection cylinder (1), a plurality of crushing knives are fixedly installed in the bottom end of the crushing shaft (10) extending to the inside of the collection box body (2), a transverse rod (29) is installed at the bottom of the collection box body (2) in a rotating way, a longitudinal rod (28) is installed in the collection box body (2) in a longitudinal rotating way, the longitudinal rod (28) and the crushing shaft (10) are both matched with the transverse rod (29), a thrust plate (25) is installed in the collection box body (2) in a sliding way, an elliptical plate (27) is fixedly installed at the top end of the longitudinal rod (28), the elliptical plate (27) is abutted to the thrust plate (25), a filter, the filter screen (20) is connected with the collection box body (2) in a sliding mode, a reciprocating mechanism is arranged on the collection box body (2), the reciprocating mechanism is fixedly connected with the filter screen (20), one side of the collection box body (2) is communicated with a collection pipe (3), and a collection net (4) is connected onto the collection pipe (3).
2. The marine garbage cleaning robot as claimed in claim 1, wherein the reciprocating mechanism comprises a transmission rod (19), a cam (22) and a turnover rod (23), the transmission rod (19) is rotatably connected with the garbage collection barrel (1), the cam (22) is fixedly installed at the bottom end of the transmission rod (19), one end of the turnover rod (23) is rotatably connected with the eccentric position of the cam (22), and the other end of the turnover rod (23) is rotatably connected with one side of the filter screen (20).
3. A marine garbage cleaning robot as claimed in claim 1, characterized in that two support rods (24) are fixedly mounted at the bottom of the garbage collection can (1), both support rods (24) are slidably connected with the filter screen (20), and both support rods (24) are L-shaped structures.
4. A marine garbage cleaning robot as claimed in claim 1, characterized in that the outer side of the crushing shaft (10) is fixedly sleeved with a first chain wheel (18), the outer side of the transmission rod (19) is fixedly sleeved with a second chain wheel (21), and the first chain wheel (18) and the second chain wheel (21) are engaged with the same chain (17).
5. A marine garbage cleaning robot as claimed in claim 1, characterized in that a cleaning rod (16) is fixedly mounted at one end of the worm (13), and the cleaning rod (16) is in contact with the garbage blocking net (15).
6. The marine garbage cleaning robot as claimed in claim 1, wherein the bottom ends of the crushing shaft (10) and the longitudinal rod (28) are respectively fixedly sleeved with a first bevel gear (30) and a third bevel gear (32), the diameter of the third bevel gear (32) is larger than that of the first bevel gear (30), two ends of the transverse rod (29) are respectively fixedly sleeved with a second bevel gear (31), and the two second bevel gears (31) are respectively meshed with the first bevel gear (30) and the third bevel gear (32).
7. The marine garbage cleaning robot as claimed in claim 1, wherein one side of the thrust plate (25) is fixedly connected with one end of a plurality of tension springs (26), and the other end of each tension spring (26) is fixedly connected with the inner wall of one side of the collection box body (2).
8. A marine garbage cleaning robot as claimed in claim 1, characterized in that one side of the garbage collection can (1) is fixedly connected with a bell mouth (33), and the bottom of the collection box body (2) is fixedly connected with a protective shell.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020478744.5U CN212125458U (en) | 2020-04-03 | 2020-04-03 | Marine waste cleaning robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202020478744.5U CN212125458U (en) | 2020-04-03 | 2020-04-03 | Marine waste cleaning robot |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN212125458U true CN212125458U (en) | 2020-12-11 |
Family
ID=73688127
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202020478744.5U Expired - Fee Related CN212125458U (en) | 2020-04-03 | 2020-04-03 | Marine waste cleaning robot |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN212125458U (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113195354A (en) * | 2021-03-20 | 2021-07-30 | 唐山哈船科技有限公司 | Self-powered marine garbage recycling device and method |
-
2020
- 2020-04-03 CN CN202020478744.5U patent/CN212125458U/en not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113195354A (en) * | 2021-03-20 | 2021-07-30 | 唐山哈船科技有限公司 | Self-powered marine garbage recycling device and method |
| CN113195354B (en) * | 2021-03-20 | 2022-07-22 | 唐山哈船科技有限公司 | Self-powered marine garbage recycling device and method |
| WO2022198351A1 (en) * | 2021-03-20 | 2022-09-29 | 唐山哈船科技有限公司 | Self-powered marine garbage recycling device and method therefor |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021196198A1 (en) | Marine debris cleaning robot | |
| CN111498030A (en) | Marine waste cleaning robot | |
| CN109208562B (en) | Cleaning device for water surface garbage floater | |
| CN212529999U (en) | River course treatment ship for garbage salvage | |
| CN111469988A (en) | Marine garbage collection and treatment device and method | |
| CN108482590A (en) | A kind of hydraulic engineering floating refuse marine salvage equipment | |
| CN214417282U (en) | Sewage garbage filtering device for sewage treatment plant | |
| CN212125458U (en) | Marine waste cleaning robot | |
| CN112705338A (en) | Building rubbish reducing mechanism for building | |
| CN112030918A (en) | Marine waste cleaning device | |
| CN113227502A (en) | Ocean floating garbage treatment equipment | |
| CN211498786U (en) | Gardens salvage equipment | |
| CN219951873U (en) | Clamp type water surface pollutant salvaging device | |
| CN116024946A (en) | River course floats formula water pollution processing apparatus | |
| CN216224608U (en) | Civil engineering construction waste treatment device | |
| CN213287135U (en) | Environment-friendly crushing device with anti-blocking screen for building construction | |
| CN112392017A (en) | Aquatic plant cleaning robot | |
| CN211226403U (en) | Novel grid device | |
| CN211494399U (en) | Marine equipment pile body cleaning ship | |
| CN110904935A (en) | Multifunctional underwater garbage fishing robot | |
| CN217298841U (en) | Lake water treatment device for hydraulic engineering | |
| CN221545537U (en) | Water surface floating pollutant cleaning device | |
| CN211393907U (en) | Suspended matter removing device for sewage treatment | |
| CN212125459U (en) | Marine waste collecting and treating device | |
| CN212742470U (en) | Ship channel cleaning device capable of preventing secondary pollution |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20201211 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |