CN210102622U - 一种基于agv小车的智能存储和拣选系统 - Google Patents
一种基于agv小车的智能存储和拣选系统 Download PDFInfo
- Publication number
- CN210102622U CN210102622U CN201920911654.8U CN201920911654U CN210102622U CN 210102622 U CN210102622 U CN 210102622U CN 201920911654 U CN201920911654 U CN 201920911654U CN 210102622 U CN210102622 U CN 210102622U
- Authority
- CN
- China
- Prior art keywords
- conveying
- plate
- agv
- transport
- intelligent storage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Warehouses Or Storage Devices (AREA)
Abstract
本实用新型公开了一种基于AGV小车的智能存储和拣选系统,包括设置多层的输送平台、相对设置在多层的输送平台侧面的输送带装置、设置在输送平台侧面的对射探测器、设置在输送平台上表面的二维码。本实用新型的基于AGV小车的智能存储和拣选系统能够进行多个置物架的置放和多个运输箱的存储,能适用于大规模的仓储。
Description
技术领域
本实用新型涉及AGV仓储领域,具体为一种基于AGV小车的智能存储和拣选系统。
背景技术
AGVAutomatedGuidedVehicle,自动导引运输车是一种现代仓储物流中经常运用到的运输工具,通常采用的是用AGV小车与相对应的运输箱进行对接后,将运输箱拖动到指定的地点进行货物的放置与取出,在此过程中,AGV小车运用红外感应或者电磁感应进行移动和定位。但是现代的物流需要进行大量的仓储输送,对于现有的AGV小车的输送能力有了更高的要求,而现有的AGV小车大多存在输送速度缓慢,且其转向的动作慢,无法适应现在的物流需要。且现有的存储架大多设置成多层,对于多层货物的输送和提取,现有的AGV小车的系统并无法满足要求。
实用新型内容
本实用新型为了解决现有技术中存在的缺陷,提供一种能快速进行AGV小车转向,适用于多层的仓储架的货物的取出和堆放的基于AGV小车的智能存储和拣选系统。
为了达到上述目的,本实用新型首先提供一种基于AGV小车的智能存储和拣选系统,包括设置多层的输送平台、相对设置在多层的输送平台侧面的输送带装置、设置在输送平台侧面的对射探测器、设置在输送平台上表面的二维码;
所述输送平台包括:
一输送板,水平设置;所述输送板上的转角处设置有输送板通孔,所述输送板通孔设置为十字型;
多个置物架,所述置物架回形设置在输送板上;
内运输通道,环形设置在置物架的内侧;
外运输通道,环形设置在置物架的外侧;
中间运输通道,直线形设置并连通内运输通道和外运输通道;
运输箱,置放在置物架上;所述运输箱的顶部的中心位置设置有二维码贴块;所述运输箱底部设置有与输送板通孔适配的十字型凹槽;所述运输箱侧面设置有运输箱侧面通孔;
一底部板,设置在输送板的正下方;所述底部板下表面设置有与所述输送板通孔位置对应的二维码扫描器;
换向装置,设置在底部板上,包括与底部板连接的升降装置和设置在升降装置顶部的旋转电机,所述旋转电机顶部设置有与所述输送板通孔适配的十字型转动块;
所述输送带装置将运输箱从输送平台输送到地面。
本实用新型还提供以下的优化方案:
优选的,所述输送带装置包括:
输送带一,水平向设置在中间运输通道的一侧;用于将运输箱从输送板输送到输送带装置中;
输送带二,斜向设置,用于将运输箱从上一层的输送平台输送到下一层的输送平台。
更优选的,所述输送带一为半圆弧形设置。
优选的,所述置物架包括两个置物架侧板和设置在所述置物架侧板内侧的置物板。
更优选的,所述置物架侧板内设置有置物架输送带,所述置物板垂直设置在置物架输送带上。
更优选的,所述置物架输送带为链板式输送带。
优选的,所述中间运输通道靠近输送带装置处设置AGV小车拦截装置。
更优选的,所述AGV小车拦截装置包括输送板上表面设置的输送板凹槽和输送板凹槽内的“凵”字型的拦截板。
更优选的,所述拦截板底部设置有弹性件连接输送板凹槽的底部。
更优选的,还包括设置在中间运输通道两侧的支撑所述输送平台的支撑柱。
本实用新型的有益效果是:
1、本实用新型的基于AGV小车的智能存储和拣选系统能够进行多个置物架的置放和多个运输箱的存储,能适用于大规模的仓储;
2、本实用新型的基于AGV小车的智能存储和拣选系统能适用于现有的AGV小车,并且能加速运输的速度,输送转向速度加快,加速了输送的效率;
3、本实用新型的基于AGV小车的智能存储和拣选系统设置有输送带装置,能将运输箱从输送板输送到地面上;
4、本实用新型的基于AGV小车的智能存储和拣选系统能使运输箱在转角处迅速对准转向;
5、本实用新型的基于AGV小车的智能存储和拣选系统在输送带装置前设置有拦截装置,能使AGV小车在转运运输箱时不会掉下输送板。
附图说明
图1为本实用新型的一种优选实施例的基于AGV小车的智能存储和拣选系统的正面图;
图2为本实用新型的一种优选实施例的基于AGV小车的智能存储和拣选系统的右视图;
图3为本实用新型的一种优选实施例的基于AGV小车的智能存储和拣选系统的立体图;
图4为本实用新型的一种优选实施例的基于AGV小车的智能存储和拣选系统的立体图;
图5为本实用新型的一种优选实施例的基于AGV小车的智能存储和拣选系统的立体图;
图6为本实用新型的一种优选实施例的输送平台的正面图;
图7为本实用新型的一种优选实施例的输送平台的立体图;
图8为本实用新型的一种优选实施例的输送平台的立体图;
图9为本实用新型的一种优选实施例的输送平台的局部图;
图10为本实用新型的一种优选实施例的输送平台的局部图;
图11为本实用新型的一种优选实施例的运输箱的立体图;
图12为本实用新型的一种优选实施例的运输箱的立体图;
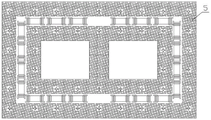
图13为本实用新型的一种优选实施例的输送平台的俯视图;
图14为本实用新型的一种优选实施例的对射探测器的立体图;
具体的附图标记为:
1输送平台;2输送带装置;3支撑柱;4对射探测器;5二维码;11输送板;12置物架;13内运输通道;14外运输通道;15中间运输通道;16运输箱;17底部板;18换向装置;19 AGV小车拦截装置;21输送带一;22输送带二;111输送板通孔;121置物架侧板;122置物板;123置物架输送带;161二维码贴块;162十字型凹槽;163运输箱侧面通孔;171二维码扫描器;181升降装置;182旋转电机;183十字型转动块;191输送板凹槽;192拦截板;193弹性件。
具体实施方式
为了使本领域的技术人员更好地理解实用新型的技术方案,下面结合具体实施方式对本实用新型作进一步的详细说明。
如图1-5,本实用新型的基于AGV小车的智能存储和拣选系统,包括设置多层的输送平台1、相对设置在多层的输送平台1侧面的输送带装置2、设置在输送平台1侧面的对射探测器4、设置在输送平台1上表面的二维码5;
如图14,所述对射探测器4可以为市面上现有的红外线的对射探测器;所述对射探测器的与输送平台1侧面接触的地方设置有固定孔,对应的输送平台的侧面也设置有固定孔,再用螺钉或者螺栓将两者连接;如图13所示,所述二维码5设置有多个,每个二维码5为方形或者长方形的块状,每个输送平台上设置有多个二维码5,形成彼此相邻的多个田字框型的构架,当AGV小车的底部的扫描器扫描到二维码5后,将二维码5解码后得到相应的位置编码,从而得到AGV小车的相对位置,从而实现AGV小车进行自我位置调整的目的;
如图6-8,所述输送平台1包括:
一输送板11,水平设置;所述输送板11上的转角处设置有输送板通孔111,所述输送板通孔111设置为十字型;
多个置物架12,所述置物架12回形设置在输送板11上;
内运输通道13,环形设置在置物架12的内侧;
外运输通道14,环形设置在置物架12的外侧;
中间运输通道15,直线形设置并连通内运输通道13和外运输通道14;
如图11-12所示,运输箱16,置放在置物架12上;所述运输箱16的顶部的中心位置设置有二维码贴块161;所述运输箱16底部设置有与输送板通孔111适配的十字型凹槽162;所述运输箱16侧面设置有运输箱侧面通孔163;所述运输箱侧面通孔163用以供对射探测器4的红外线穿过,以确认转向的角度正确;
一底部板17,设置在输送板11的正下方;所述底部板17下表面设置有与所述输送板通孔111位置对应的二维码扫描器171;
换向装置18,设置在底部板17上,包括与底部板17连接的升降装置181和设置在升降装置181顶部的旋转电机182,所述旋转电机182顶部设置有与所述输送板通孔111适配的十字型转动块183;所述升降装置181优选为电动推杆装置或者电动气缸装置;旋转电机182可以为步进电机或者伺服电机;
所述输送带装置2将运输箱16从输送平台1输送到地面。
所述输送板11设置成长方形的板状,且将置物架12围成回字形的长方形围合状,在置物架12的内外两侧,沿其置物架12置放的形状设置两条运输通道,具体为内运输通道13和外运输通道14;在内运输通道13和外运输通道14的中间位置沿其垂直方向设置一从输送板11的一侧往另一侧延伸的中间运输通道15,中间运输通道15与运输通道13和外运输通道14为直角相交,这样设置能减少AGV小车的输送距离,运输箱16的底部设置有十字型凹槽162与十字型转动块183适配,这样能快速的将运输箱16进行转向,且在运输箱16的顶部设置有二维码扫描器171,能识别出运输箱16的具体箱号,从而确定运输箱16的输送位置。优选的,还可以在系统和AGV小车对接上时,将识别出的箱号与系统内输送目的地对照,指导AGV小车的前进方向。
为了更好的将运输箱16输送到地面,所述输送带装置2包括:
输送带一21,水平向设置在中间运输通道15的一侧;用于将运输箱16从输送板11输送到输送带装置2中;
输送带二22,斜向设置,用于将运输箱16从上一层的输送平台1输送到下一层的输送平台1。所述输送带一21优选设置为半圆弧形设置。这样设置成两个运行部分的目的是,输送带二22输送的距离较长,而输送带一21输送的距离短,在AGV小车将运输箱16输送到输送带一21上,最好是能够保持输送带一21是静止状态,而输送带二22的输送距离更长,如果需要转运的货物多的时候,能保证输送带二22保持长时间的运转,而输送带一21也能暂停等运输箱16输送到上面后再启动,这样不至于在将运输箱16从输送板11上输送时浪费太多的运输时间。
为了在置物架12上放置更多的运输箱16,所述置物架12包括两个置物架侧板121和设置在所述置物架侧板121内侧的置物板122。运输箱16就放置在置物板122的上面。
如图9所示,为了实现自动化的输送,所述置物架侧板121内设置有置物架输送带123,所述置物板122垂直设置在置物架输送带123上。所述置物架输送带123为链板式输送带。这样能自动对置物架12上的运输箱16进行调整。
如图10,为了使转送的时候AGV小车不会掉下输送板11,所述中间运输通道15靠近输送带装置2处设置AGV小车拦截装置19。所述AGV小车拦截装置19包括输送板11上表面设置的输送板凹槽191和输送板凹槽191内的“凵”字型的拦截板192。所述拦截板192优选为金属材质。所述拦截板192底部设置有弹性件193连接输送板凹槽191的底部。所述拦截板192前端是转动连接在输送板凹槽191的内侧面,而拦截板192的后端是用弹性件193与输送板凹槽191的底部连接,拦截板192在正常情况下是微凸出于所述输送板11的上表面的,所述拦截板192的长度短于运输箱16的长度,所述弹性件193优选为弹簧。
为了保持整个装置的稳定性,还包括设置在中间运输通道15两侧的支撑所述输送平台1的支撑柱3。
本实用新型的基于AGV小车的智能存储和拣选系统的使用方法是:
先将运输箱16装好货物放置在置物架12上,然后将AGV小车放在每一层的输送平台1的输送板11上,由系统的数据处理中心对其进行输送信号的传输,当需要取运输箱16时,用AGV小车将运输箱16拖出,将运输箱16拖到需要转向的地方的输送板通孔111正上方,当二维码扫描器171扫描到运输箱16上的二维码贴块161后,确认运输箱16的位置后,启动升降装置181的开关,将十字型转动块183从输送板通孔111中穿出,并对准运输箱16底部的十字型凹槽162插入后停止升降装置181,启动旋转电机182将运输箱16进行旋转,并一起带动与运输箱16连接的AGV小车旋转,旋转到指定方向后,当运输箱侧面通孔163与供对射探测器4方向一致时,对射探测器4接收到对面的红外线信号时,停止旋转电机182,并启动升降装置181向下收缩到原始位置后停止升降装置181,此时AGV小车再继续前行,再到下一个转向点再转向后前进,一直到运输箱16输送到输送带装置2前面,AGV小车将运输箱16往前推到AGV小车拦截装置19位置后,由于拦截板192的长度小于运输箱16的长度,运输箱16就能从拦截板192的上方滑动过去,并下压拦截板192从而更顺畅的输送过去,当运输箱16输送到输送带装置2上的输送带1的指定位置后,运输箱16完全的通过拦截板192后,拦截板192在弹性件193的作用下回弹,由于AGV小车的长度短于拦截板192的长度,因此在凵型围合的拦截板192中被围住,不能往前移动。此时启动输送带一21将运输箱16从输送带一21输送到输送带二22上,并从输送带二22上往下输送,一直输送到地面即可。当置物架12设置多层时,置物架输送带123上垂直向设置有多个置物板122,置物板122承托住运输箱16,并且在运输箱16取出后可以转动将上一层的运输箱16输送到底部,再进行这个运输箱16的输送工作。
以上仅是本实用新型的优选实施方式,应当指出的是,上述优选实施方式不应视为对本实用新型的限制,本实用新型的保护范围应当以权利要求所限定的范围为准。对于本技术领域的普通技术人员来说,在不脱离本实用新型的精神和范围内,还可以做出若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
Claims (10)
1.一种基于AGV小车的智能存储和拣选系统,其特征在于:包括设置多层的输送平台、相对设置在多层的输送平台侧面的输送带装置、设置在输送平台侧面的对射探测器、设置在输送平台上表面的二维码;
所述输送平台包括:
一输送板,水平设置;所述输送板上的转角处设置有输送板通孔,所述输送板通孔设置为十字型;
多个置物架,所述置物架回形设置在输送板上;
内运输通道,环形设置在置物架的内侧;
外运输通道,环形设置在置物架的外侧;
中间运输通道,直线形设置并连通内运输通道和外运输通道;
运输箱,置放在置物架上;所述运输箱的顶部的中心位置设置有二维码贴块;所述运输箱底部设置有与输送板通孔适配的十字型凹槽;所述运输箱侧面设置有运输箱侧面通孔;
一底部板,设置在输送板的正下方;所述底部板下表面设置有与所述输送板通孔位置对应的二维码扫描器;
换向装置,设置在底部板上,包括与底部板连接的升降装置和设置在升降装置顶部的旋转电机,所述旋转电机顶部设置有与所述输送板通孔适配的十字型转动块;
所述输送带装置将运输箱从输送平台输送到地面。
2.根据权利要求1所述的基于AGV小车的智能存储和拣选系统,其特征在于:所述输送带装置包括:
输送带一,水平向设置在中间运输通道的一侧;用于将运输箱从输送板输送到输送带装置中;
输送带二,斜向设置,用于将运输箱从上一层的输送平台输送到下一层的输送平台。
3.根据权利要求2所述的基于AGV小车的智能存储和拣选系统,其特征在于:所述输送带一为半圆弧形设置。
4.根据权利要求1所述的基于AGV小车的智能存储和拣选系统,其特征在于:所述置物架包括两个置物架侧板和设置在所述置物架侧板内侧的置物板。
5.根据权利要求4所述的基于AGV小车的智能存储和拣选系统,其特征在于:所述置物架侧板内设置有置物架输送带,所述置物板垂直设置在置物架输送带上。
6.根据权利要求5所述的基于AGV小车的智能存储和拣选系统,其特征在于:所述置物架输送带为链板式输送带。
7.根据权利要求1所述的基于AGV小车的智能存储和拣选系统,其特征在于:所述中间运输通道靠近输送带装置处设置AGV小车拦截装置。
8.根据权利要求7所述的基于AGV小车的智能存储和拣选系统,其特征在于:所述AGV小车拦截装置包括输送板上表面设置的输送板凹槽和输送板凹槽内的“凵”字型的拦截板。
9.根据权利要求8所述的基于AGV小车的智能存储和拣选系统,其特征在于:所述拦截板底部设置有弹性件连接输送板凹槽的底部。
10.根据权利要求9所述的基于AGV小车的智能存储和拣选系统,其特征在于:还包括设置在中间运输通道两侧的支撑所述输送平台的支撑柱。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201920911654.8U CN210102622U (zh) | 2019-06-17 | 2019-06-17 | 一种基于agv小车的智能存储和拣选系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201920911654.8U CN210102622U (zh) | 2019-06-17 | 2019-06-17 | 一种基于agv小车的智能存储和拣选系统 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN210102622U true CN210102622U (zh) | 2020-02-21 |
Family
ID=69564371
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201920911654.8U Active CN210102622U (zh) | 2019-06-17 | 2019-06-17 | 一种基于agv小车的智能存储和拣选系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN210102622U (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110143395A (zh) * | 2019-06-17 | 2019-08-20 | 隆链智能科技(上海)有限公司 | 一种基于agv小车的智能存储和拣选系统 |
-
2019
- 2019-06-17 CN CN201920911654.8U patent/CN210102622U/zh active Active
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110143395A (zh) * | 2019-06-17 | 2019-08-20 | 隆链智能科技(上海)有限公司 | 一种基于agv小车的智能存储和拣选系统 |
| CN110143395B (zh) * | 2019-06-17 | 2024-05-03 | 隆链智能科技(上海)有限公司 | 一种基于agv小车的智能存储和拣选系统 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210380337A1 (en) | Automated bot with transfer arm | |
| KR101717447B1 (ko) | 이송셔틀 및 이를 이용한 자동창고 시스템 | |
| KR100336168B1 (ko) | 물품옮겨싣는장치 | |
| CN1970406B (zh) | 自动储物装置及相关储物方法 | |
| KR960005538B1 (ko) | 대차 연결식 콘베이어 | |
| CN104925444A (zh) | 一种移动堆垛式自动立库 | |
| KR20120108962A (ko) | 물품 이송탑재 장치 및 이것을 구비한 스태커 크레인 | |
| CN210102622U (zh) | 一种基于agv小车的智能存储和拣选系统 | |
| KR102339212B1 (ko) | 자동 창고용 이송 로봇 | |
| TWI707813B (zh) | 自主運輸載具、自動儲存及提取系統自主運輸載具,及對具有共用傳送手臂的自主運輸載具之承載部分中所裝載的承載物品進行運輸之方法 | |
| CN212314609U (zh) | 一种生产线自动化配送系统 | |
| CN110143395B (zh) | 一种基于agv小车的智能存储和拣选系统 | |
| JP4082918B2 (ja) | 段積み物形成方法および段積み物形成設備 | |
| JPS6250362B2 (zh) | ||
| CN112573051B (zh) | 物品传送装置 | |
| CN113830471B (zh) | 一种生产线自动化配送系统及配送方法 | |
| CN214826313U (zh) | 一种生胶运输装置 | |
| JP3601657B2 (ja) | 自動倉庫 | |
| JP3603986B2 (ja) | 自動倉庫の物品搬送システム | |
| CN104960831A (zh) | 一种移动堆垛式密集存储库 | |
| JPH11157643A (ja) | スラットコンベヤ | |
| JP2015042590A (ja) | 搬送装置及び搬送設備 | |
| JP2000062908A (ja) | 自動倉庫 | |
| CN115258485A (zh) | 一种托盘周转系统及周转方法 | |
| CN116605563A (zh) | 工作站、容器装卸系统和容器装卸方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| GR01 | Patent grant | ||
| GR01 | Patent grant |