CN1289034C - X射线ct装置、三维图象再次构成方法及权重设定方法 - Google Patents
X射线ct装置、三维图象再次构成方法及权重设定方法 Download PDFInfo
- Publication number
- CN1289034C CN1289034C CN02151818.1A CN02151818A CN1289034C CN 1289034 C CN1289034 C CN 1289034C CN 02151818 A CN02151818 A CN 02151818A CN 1289034 C CN1289034 C CN 1289034C
- Authority
- CN
- China
- Prior art keywords
- data
- ray
- weight
- once
- projection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000000034 method Methods 0.000 title claims description 150
- 238000013480 data collection Methods 0.000 claims description 82
- 238000012545 processing Methods 0.000 claims description 50
- 238000012937 correction Methods 0.000 claims description 36
- 238000000205 computational method Methods 0.000 claims description 35
- 230000015572 biosynthetic process Effects 0.000 claims description 23
- 230000005540 biological transmission Effects 0.000 claims description 7
- 230000000007 visual effect Effects 0.000 claims description 7
- 230000033001 locomotion Effects 0.000 abstract description 20
- 238000009826 distribution Methods 0.000 abstract description 8
- 229910052704 radon Inorganic materials 0.000 abstract description 6
- 238000010521 absorption reaction Methods 0.000 abstract description 4
- 238000004422 calculation algorithm Methods 0.000 abstract description 4
- SYUHGPGVQRZVTB-UHFFFAOYSA-N radon atom Chemical compound [Rn] SYUHGPGVQRZVTB-UHFFFAOYSA-N 0.000 abstract description 4
- 230000009467 reduction Effects 0.000 abstract description 3
- 230000008569 process Effects 0.000 description 19
- 238000001914 filtration Methods 0.000 description 18
- 238000002591 computed tomography Methods 0.000 description 12
- 230000000694 effects Effects 0.000 description 9
- 238000005516 engineering process Methods 0.000 description 8
- 230000010354 integration Effects 0.000 description 8
- 238000001514 detection method Methods 0.000 description 5
- 238000012552 review Methods 0.000 description 5
- 238000003745 diagnosis Methods 0.000 description 4
- 238000005070 sampling Methods 0.000 description 4
- 238000006467 substitution reaction Methods 0.000 description 4
- 238000013461 design Methods 0.000 description 3
- 230000006872 improvement Effects 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 238000004321 preservation Methods 0.000 description 3
- 238000009825 accumulation Methods 0.000 description 2
- 238000005054 agglomeration Methods 0.000 description 2
- 210000003050 axon Anatomy 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000009795 derivation Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 241001269238 Data Species 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 125000004122 cyclic group Chemical group 0.000 description 1
- 238000010894 electron beam technology Methods 0.000 description 1
- 238000013213 extrapolation Methods 0.000 description 1
- 238000002546 full scan Methods 0.000 description 1
- 238000009499 grossing Methods 0.000 description 1
- 238000003384 imaging method Methods 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
- 238000012163 sequencing technique Methods 0.000 description 1
- 230000008054 signal transmission Effects 0.000 description 1
- 230000011664 signaling Effects 0.000 description 1
- 229910052709 silver Inorganic materials 0.000 description 1
- 239000004332 silver Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 238000003325 tomography Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 238000011426 transformation method Methods 0.000 description 1
Images





















Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/02—Devices for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/03—Computerised tomographs
- A61B6/032—Transmission computed tomography [CT]
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/02—Devices for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis
- A61B6/027—Devices for diagnosis sequentially in different planes; Stereoscopic radiation diagnosis characterised by the use of a particular data acquisition trajectory, e.g. helical or spiral
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/40—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment with arrangements for generating radiation specially adapted for radiation diagnosis
- A61B6/4064—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment with arrangements for generating radiation specially adapted for radiation diagnosis specially adapted for producing a particular type of beam
- A61B6/4085—Cone-beams
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B6/00—Apparatus for radiation diagnosis, e.g. combined with radiation therapy equipment
- A61B6/52—Devices using data or image processing specially adapted for radiation diagnosis
- A61B6/5258—Devices using data or image processing specially adapted for radiation diagnosis involving detection or reduction of artifacts or noise
- A61B6/5264—Devices using data or image processing specially adapted for radiation diagnosis involving detection or reduction of artifacts or noise due to motion
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T11/00—2D [Two Dimensional] image generation
- G06T11/003—Reconstruction from projections, e.g. tomography
- G06T11/005—Specific pre-processing for tomographic reconstruction, e.g. calibration, source positioning, rebinning, scatter correction, retrospective gating
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2211/00—Image generation
- G06T2211/40—Computed tomography
- G06T2211/412—Dynamic
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S378/00—X-ray or gamma ray systems or devices
- Y10S378/901—Computer tomography program or processor
Abstract
提供一种X射线CT装置、X射线CT的三维图象再次构成方法及X射线CT的权重设定方法。即使对于将作为锥形射束CT技术的三维图象再次构成计算方法应用于医用CT装置中的场合,也可以降低由于被检测物体移动所产生的赝象,并且能够提高时间分解率。本发明的X射线CT装置,具有门型台架(1)、诊断床(2)和控制柜(3),并且可以通过使X射线锥形射束沿着预定轨道对被检测物体P进行扫描的方式,对反映被检测物体内X射线吸收函数的、呈三维分布形式的锥形射束数据进行收集。控制柜(3)可以依据锥形射束数据的收集时刻,设定其数据的可信赖度,并且可以依据该数据的可信赖度,由锥形射束数据求解出三维拉东数据的权重函数。而且,这种装置还可以具有能够利用这种权重函数,通过对该三维拉东数据进行三维图象再次构成的计算方法而进行图象再次构成的再次构成单元(36)。
Description
技术领域
本发明涉及使用呈锥形射束形状的X射线进行扫描的X射线CT装置,特别涉及利用二维检测器对透射X射线的二维投影数据进行收集、进而对这种二维投影数据进行三维图象再次构成以获得CT图象的、被称为锥形射束CT装置的X射线CT装置。
背景技术
X射线CT扫描装置可以以夹持着架台(门型台架)内的被检测物体的方式,配置有X射线管(X射线照射装置)和X射线检测器,而且在按照诸如R-R方式进行驱动的实例中,X射线管和X射线检测器可以同步绕被检测物体的周围转动,从而使由X射线管发射的X射线光束,可以透射过被检测物体入射至X射线检测器处。这种X射线检测器与DAS(数据收集装置)相连接,通过该DAS可以对每一次扫描时的X射线透射强度数据进行收集,并且可以通过对这种投影数据进行图象再次构成处理的方式,获得被检测物体内的图象数据(体层数据或体积数据)。
在这种X射线CT扫描装置的技术领域中,近年来正在开展对于能够高速生成具有高分解率的三维图象的一种技术,即利用锥形射束进行扫描的、所谓的锥形射束CT技术的研究工作。
例如,在日本特开平9-19425号公报(参考专利文献1)中,公开了一种可以减小实测X射线路径和计算X射线路径间的偏置所产生的再次构成误差,从而可以提高图象质量的、作为一种锥形射束CT装置的X射线计算机体层成象装置。
而且,在日本特开2000-102532号公报中(参考专利文献2)中,公开了一种利用呈锥形射束形状的连续X射线进行扫描,从而可以保持DAS的实际回路大小,并且可以在扫描时间不特别长的条件下,减小投影数据收集时间上的偏置所产生的实际路径减少的、可以对高分解率的投影数据进行可靠收集的、作为一种锥形射束CT装置的X射线CT扫描装置。
[专利文献1]
日本特开平9-19425号公报
[专利文献2]
日本特开2000-102532号公报
发明内容
然而,如前所述的在先技术实例,在将锥形射束CT装置作为实际的医用CT装置使用时,作为被描绘物体的患者可能会产生运动,当忽略这种运动而采用常规的三维图象再次构成计算方法,由投影数据再次构成三维图象时,会形成赝象,即存在有时间分解率恶化的问题。
本发明正是为了解决上述在先技术中的问题而提出的,其目的就是提供一种即使对于将锥形射束CT技术用的三维图象再次构成计算方法应用于医用CT技术中的场合,也可以降低由于被描绘物体移动所产生的赝象,并且能够提高时间分解率的X射线装置,以及锥形射束CT技术用的三维图象再次构成方法。
为了实现上述目的,本发明提供了一种X射线CT装置,其特征在于,包括:发射锥形射束形状的X射线的X射线源;对由该X射线源发射的且透射过被检测物体的X射线进行检测,并且输出与该X射线量相对应的投影数据用的二维X射线检测器;通过至少使所述X射线源沿着一定轨道移动而进行所需扫描的方式,在一定扫描范围内使用由该X射线源发射的X射线对被检测物体进行扫描,并且通过所述X射线检测器对由于该扫描形成的所述投影数据进行收集的扫描单元;依据由该扫描单元收集到的投影数据生成呈三维分布形式的三维拉东数据用的拉东数据生成单元;对于通过这种拉东数据生成单元生成的三维拉东数据,利用作为与所述投影数据收集时刻的可信赖度对应的权重函数的、在代表再次构成图象的时刻的数据收集时刻为最大权重,在远离该数据收集时刻的数据收集时刻为比较小权重的权重函数,进行权重处理用的权重处理单元;利用由这种权重处理单元进行过权重处理的三维拉东数据,通过所需要的三维图象再次构成计算方法获得再次构成图象用的图象再次构成单元。
优选地,所述权重处理单元可以为按照分别与作为求解所述三维拉东数据用的面积分对象的平面相对应的方式,进行所述权重处理用的单元。
例如,所述权重处理单元还可以为,作为所述权重函数,采用在代表由所述图象再次构成单元进行再次构成图象的时刻的数据收集时刻以及与该数据收集时刻相接近的时刻为最大权重,在远离该数据收集时刻的数据收集时刻为比较小权重的权重函数,对与在所述扫描范围收集到的投影数据相对应的三维拉东数据进行所述权重处理的单元。
再例如,所述权重处理单元还可以为,作为所述权重函数,采用在代表由所述图象再次构成单元进行再次构成图象的时刻为代表的数据收集时刻为最大权重,随着从该数据收集时刻离开而使所述权重减小的权重函数,对与在所述扫描范围收集到的投影数据相对应的三维拉东数据进行所述权重处理的单元。
优选地,所述权重函数还可以按照与所述扫描方式的种类进行设定。例如,本发明所采用的扫描方式可以包括所述轨道为沿着呈一圈转动形式构成的圆形轨道移动的圆形轨道全扫描方式;所述轨道为沿着呈一圈转动形式构成的圆形轨道移动且在360度的扫描范围内获得投影数据的改进型圆形轨道半扫描方式(MHS:Modified Half Scan);所述轨道为沿着呈一圈转动形式构成的圆形轨道移动的圆形轨道欠扫描方式;所述轨道为沿着呈两圈以上转动形式构成的圆形轨道移动的圆形轨道扫描方式;所述轨道为沿着由直线轨道和圆形轨道组合构成的轨道移动的扫描方式;或者为所述轨道为沿着螺旋轨道移动的螺旋扫描方式等。
而且,为了能够实现上述目的,本发明还提供一种X射线CT的三维图象再次构成方法,其特征在于包括:用由X射线源发射的呈锥形射束形状的X射线对被检测物体一边照射一边扫描;通过伴随着所述扫描对从所述被检测物体透过的X射线进行检测和收集,对所述被检测物体的二维投影数据进行收集;利用收集到的投影数据生成三维分布的三维拉东数据;使用作为反映按照所述投影数据收集时刻预先确定的该投影数据的可信赖度的权重函数的、在代表再次构成图象的时刻的数据收集时刻为最大权重,在远离该数据收集时刻的数据收集时刻为比较小权重的权重函数,对所述三维拉东数据进行修正;以及对该修正后的三维拉东数据进行三维图象再次构成计算方法的处理,再次构成所述被检测物体的三维图象数据。例如,使用所述权重函数对所述三维拉东数据进行的修正作业,是按照分别与作为求解所述三维拉东数据用的面积分对象的平面相对应的方式进行的。
而且,为了能够实现上述目的,本发明还提供一种X射线CT的权重设定方法,其特征在于,包括:用由X射线源发射的呈锥形射束形状的X射线对被检测物体一边照射一边扫描;通过伴随着所述扫描对从所述被检测物体透过的X射线进行检测和收集,对所述被检测物体的二维投影数据进行收集;依据所述二维投影数据的收集时刻求出该投影数据的可信赖度;以及为了对由所述投影数据生成的三维分布的三维拉东数据进行修正,依据所述投影数据的可信赖度,确定在代表再次构成图象的时刻的数据收集时刻为最大权重,在远离该数据收集时刻的数据收集时刻为比较小权重的权重处理。
参考下面结合附图对发明的实施方案的说明,可以更清楚的获知与本发明其它实施方案相关的具体构成形式和特征。
附图说明
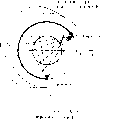
图1为说明根据本发明实施方案的X射线CT扫描装置(X射线装置)的门型台架内的X射线管和二维检测器的位置关系的图。
图2为X射线CT扫描装置的示意性构成图。
图3为X射线CT扫描装置中的电气系统的示意性方框图。
图4为通过坐标系说明二维数据收集的图。
图5为说明在二维拉东空间中的二维数据收集的图。
图6为通过坐标系说明二维拉东数据的图。
图7为通过坐标系说明通过发自X射线焦点的扇形射束收集到的二维拉东数据的图。
图8为说明具有冗余性的二维拉东数据用的图。
图9为通过坐标系说明具有冗余性的二维拉东数据收集的状态的图。
图10为通过弦波图说明具有冗余性的二维拉东数据的图。
图11为表示FS(二维圆形轨道全扫描)时的体层图象的时间敏感度曲线分布图。
图12为说明HS(二维圆形轨道半扫描)的再次构成的图。
图13为通过弦波说明HS再次构成时二维拉东数据的图。
图14为表示HS再次构成时体层图象的时间敏感度曲线分布图。
图15为说明US(二维圆形轨道欠扫描)再次构成时的图。
图16为通过弦波图说明US再次构成时二维拉东数据的图。
图17为表示US再次构成时体层图象的时间敏感度曲线分布图。
图18为说明OS(二维圆形轨道过扫描)时的再次构成的图。
图19为通过弦波图说明OS再次构成时二维拉东数据的说明图。
图20为通过坐标系说明三维数据收集的图。
图21为说明在三维拉东空间中的三维数据收集的图。
图22为说明通过来自某焦点的扇形射束收集的三维拉东数据的图。
图23为说明再次构成被描绘物体所需要的三维拉东数据的图。
图24为说明通过三维圆形轨道扫描方式收集的三维拉东数据的图。
图25为图23和图24重叠后的图。
图26为说明通过用三维圆形轨道半扫描(β=[0~π+2γm])的方式收集的三维拉东数据的图。
图27为图23和图26重叠后的图。
图28为说明shift-variant FBP(移位变形滤波逆投影)方法的图。
图29为说明作为另一三维图象再次构成方法实例中的几何学关系的图。
图30为说明对直线和圆周进行一圈转动扫描时数据可信赖度函数实例用的图。
图31为说明呈若干圈连续转动形式的圆形轨道扫描时数据可信赖度函数实例用的图。
图32为说明螺旋扫描时数据可信赖度函数实例用的图。
图33为说明数据收集冗余性的图。
图34为说明数据收集冗余性的另一图。
图35为说明不具有冗余性的数据收集的图。
图36为说明实施本发明的三维图象再次构成计算方法的一例的示意性流程图。
图37为说明实施本发明的三维图象再次构成计算方法的另一例的示意性流程图。
附图中参考标号的含义为:
1 门型台架
2 诊断床
3 控制柜
4 电源装置
10 X射线管
11 二维检测器
24 DAS
30 主控制器
31~33 控制器
36 再次构成单元
38 显示器
具体实施方案
下面参考图1~图37,对根据本发明的X射线CT装置进行说明。而且,根据本发明的X射线CT装置的三维图象再次构成方法和X射线CT装置的修正函数设定方法,可以作为所述X射线CT装置的功能而与其整体实施,所以下面通过对X射线CT装置的说明,一并对这些方法进行说明。
如图1~图3所示的X射线CT扫描装置(X射线CT装置)可以具有门型台架1、诊断床2、控制柜3、电源装置4和各种控制器,并且可以通过诸如R-R方式进行驱动。各种控制器可以如图3所示,包括高电压控制器31、台架控制器33、诊断床控制器32等。
在此,可以如图1、图2所示,将诊断床2的长度方向定义为列方向(或者称为转动轴方向、体层方向)Z,并且将与其相正交的两个方向分别定义为通道方向X和光束照射方向Y。
在诊断床2的上面还配置有呈可以沿其长度方向(列方向Z)滑动支撑的顶板2a,而且被检测物体P可以搭载在该顶板2a的上面。可以通过诸如伺服电动机等的诊断床驱动装置2b的驱动,使顶板2a可以通过进退方式插入在门型台架1上的诊断用开口部(图中未示出)处。由诊断床控制器32给出的驱动信号供给至诊断床驱动装置2b处。在诊断床2处还可以设置有对顶板2a沿诊断床长度方向的位置进行电气检测的、诸如编码器等的位置检测器(图中未示出),并且可以将检测信号作为诊断床控制用的信号传送至诊断床控制器32处。
如图1和图3所示,门型台架1在其内部处还可以具有大体呈圆筒形状的转动框架9。如上所述的诊断用开口部位于转动框架9的内侧处。而且,在转动框架9的内侧处还以夹持着插入在诊断用开口部中的被检测物体P的方式,相对设置有X射线管10和作为X射线检测器的二维检测器11。在如图3所示的实例中,还在转动框架9上的预定位置处,设置有高电压产生器21、预准直器22、作为主准直器的杂散射线去除用准直器23、数据收集装置(DAS)24和架台驱动装置25等。
其中,作为X射线源使用的X射线管10,可以由诸如转动阳极型X射线管构成,当由高电压产生器21给出的电流连续流经灯丝时,会对灯丝进行加热,进而向靶极发射出热电子。可以通过这种热电子与靶极面间的冲突形成有效焦点,并且采用比靶极面上的有效焦点范围更大的X射线束进行持续的照射。
通过低压集流环26把电源装置4给出的低电压电源,以及通过光学信号传送系统27把高电压控制器31给出的X射线照射控制信号,一并供给至高电压产生器21。因此,高电压产生器21可以在利用所供给的低电压生成高电压的同时,生成与高电压给出的控制信号相对应的连续的管电压,并且将其供给至X射线管10。
预准直器22配置在X射线管10和被检测物体P之间,作为主准直器使用的杂散射线去除用准直器23配置在被检测物体P与二维检测器11之间。预准直器22还可以沿诸如列方向Z,形成有具有一定宽度的、呈窄缝形状的开口部。采用这种构成形式,还可以对由X射线管10照射出的全部X射线在列方向Z上的宽度进行限制,从而可以形成与二维检测器11上的若干个检测元件列相对应的、位于所需要的整个体层宽度处的锥形射束。
X射线管10和二维检测器11可以在转动框架9的转动驱动作用下,以诊断用开口部中的轴向方向为转动中心轴,在门型台架1内按照彼此相对的方式进行转动。
二维检测器11的整体形状可以呈平面形,也可以呈圆筒形,在本实例中是以平面形为例进行说明的(本发明也可以采用呈圆筒形的检测器)。这种二维检测器11可以由具有若干个检测通道的检测元件,沿体层方向配置成若干列的检测器构成(请参见图1)。例如,各检测元件的检测部可以由当入射有X射线时,可以将其变换为光信号,进而将该光信号变换为电气信号的、诸如闪烁计和光电二极管等的固体检测器构成。而且,在这种检测元件处还可以设置有电荷蓄积部(取样点)。因此,这种二维检测器11还可以利用DAS 24中的开关组,依次选择这些电荷蓄积部并进行电荷读取。由此,可以对表示透射X射线的强度的信号(投影数据)进行检测。而且,还可以采用能够将入射的X射线直接变换成电气信号的传感器(I.I.等),作为这种检测元件。
DAS 24可以是一种通过开关组切换,对由各检测元件给出的检测信号依次读取的、诸如A/D(模拟/数字)变换装置(进行电压变换的取样装置),即所谓的过滤式DAS的结构。为了按这种方式运行,考虑把二维检测器作为检测器11时,DAS 24具有诸如N通道型的列选择部,一个通道选择部,一个A/D变换器,以及控制回路等。
数据传送部28可以对位于门型台架1内侧的转动侧和固定侧处的信号通路进行连接,所以例如,在此可以采用通过非接触方式进行信号传送的光传送系统。而且,也可以采用呈集流环形式的部件作为这种数据传送部28。通过这种数据传送部28取出的、数字量的投影数据,传送至控制柜3中如后所述的的修正单元处。
而且,架台驱动装置25中位于门型台架1内转动侧的全部构成要素,可以具有转动框架9和绕该中心轴转动的电动机和齿轮单元等。由台架控制器33给出的驱动信号供给至这种架台驱动装置25处。
高电压控制器31、诊断床控制器32和台架控制器33在信号方面,设置在门型台架1和诊断床2与控制柜3之间,并且可以响应由如后所述的主控制器给出的控制信号,分别驱动相应的负荷要素。
控制柜3可以由大体作为整个系统的主控制器30构成,并且可以具有通过总线与主控制器30相连接的修正单元34、数据保存单元35、再次构成单元36、显示处理器37、显示器38和输入器39等。
修正单元34可以响应由主控制器30给出的处理指令,对由DAS 24传送来的、数字量的投影数据,进行诸如偏置修正和校准修正等的各种修正处理。进行这种修正处理后的收集数据可以按照主控制器30给出的写入指令,暂时储存、保存在数据保存单元35处。这种保存数据还可以在所需要的时间,依据由主控制器30给出的读取指令由数据保存单元35处读取出,并传送至再次构成单元36处。
再次构成单元36在主控制器30的管理下,在对再次构成用收集数据进行传送的阶段,依据适用根据本发明的锥形射束CT装置的三维图象再次构成方法(如后所述)的三维图象再次构成计算方法,进行图象的再次构成处理,生成三维区域的图象数据。这种图象数据可以依据主控制器30给出的控制指令,在需要时保存在数据保存单元35处,并且可以传送至显示处理器37处。
显示处理器37可以对图象数据进行诸如彩色处理、高性能计算机计算数据和扫描信息的重叠处理等所需要的处理,随后供给至显示器38处。
显示器38可以对该图象数据进行D/A变换,并且将其作为体层图象进行显示。
输入器39用于将诸如扫描条件(包含扫描部位和位置、体层厚度、X射线管电压和电流、相对于被检测物体的扫描方向等)、图象显示条件等的指令,传送给主控制器30。
下面参考图4~图27,对作为本实施方案主要内容的锥形射束CT的三维图象再次构成方法的原理进行说明。
在此,从本发明人的角度出发,首先对已知的二维图象再次构成方法进行回顾,对将其应用于三维图象再次构成方法时存在的问题和主要原因进行分析,进而利用运算式,对由此完成的、作为根据本发明构造的三维图象再次构成计算方法进行详细说明。n维图象再次构成指的是进行n维逆拉东变换(inverseRadon transform),所以利用这种运算,可以通过对被描绘物体进行线积分的方式,获得与被描绘物体(与如上所述的被检测物体P相当,在下面的说明中亦然)内的X射线吸收函数相对应的投影数据相当的二维拉东拉东数据(2D-Radon data),并且可以通过进行被描绘物体的面积分的方式,获得三维拉东数据(3D-Radon data)。
1、对二维图象再次构成方法的回顾
首先从本发明人的角度出发,对使用扇型射束的二维图象再次构成方法进行回顾。一般说来,二维数据收集的场合,通过呈二维分布的被描绘物体的或与该被描绘物体相接的全部直线的线积分数据,与二维拉东数据(X射线投影数据)相当,而且如果对这种二维拉东数据进行收集,可以进行完全的图象再次构成。下面参考图4~图19,对此进行说明。在此为了使说明简单,采用的是使作为X射线检测器的检测元件等间距配置在圆弧上,并且能等角度取样的圆弧型检测器,然而如上面所描述的那样,采用哪种检测器形状(呈圆弧形或直线形)对于本发明来说是不重要的。
首先如图4所示,当采用以位于门型台架1内的转动框架9(请参考前面的说明)的转动轴(转动中心)z为原点的xy坐标系时,对被描绘物体f进行的二维图象再次构成,可以是通过取以转动轴z为中心的、包含着被描绘物体f的、半径为r的圆作为支撑体(support),并且利用该支撑体内的范围对二维拉东空间进行离散性消除的方式,获得二维拉东数据的。
而且正如图5所示,与二维拉东数据相当的、通过诸如CT等方式收集到的被描绘物体f的X射线投影数据p,是沿着位于扇型射束内的射线,对被描绘物体f的X射线吸收函数进行线积分获得的值的集合。
例如,对于如图5和图6所示的、X射线管10的X射线焦点在以转动轴z为中心、半径为R的圆形轨道上转动时,由该圆形轨道上的X射线焦点β的位置起,沿着射线对被描绘物体f的投影数据p(β、γ)进行的收集,与利用二维拉东空间,对由转动轴z起向射线引垂线所获得的交点A处的二维拉东数据进行的收集相当(在此,β表示投影角度,即X射线焦点位置,γ(-γm~γm)表示射线角度)。
因此如图7所示,如果需要沿着由X射线焦点β照射出的扇型射束中的全部射线,对被描绘物体f的投影数据p(β、γ)进行收集时,可以对取X射线焦点β至转动轴z为直径构成的圆周(请参见图7中的实线和一点虚线)上的二维拉东数据进行收集。这种场合是一种使检测器元件呈离散形式配置在比较大限定范围(扇型角度)时的场合,并且是对如图7中实线所示范围内的二维拉东数据进行收集的。
而且,对于如图8和图9所示的、X射线焦点β在z=0的平面上沿着以转动轴z为中心、以R为半径的圆形轨道呈一圈转动形式进行扫描的场合,可以对同一点A处的二维拉东数据进行两次收集,所以这种场合下对扫描数据的收集,是一种具有冗余性的收集。
图10表示使用横轴为射线角度γ(-γm~γm),纵轴为作为X射线焦点位置的投影角度β(0~2π)时的弦波图,说明所述数据的收集的图。例如,对于这种场合由图中实线所示的β=β时获得的二维拉东数据,与由图中的一点虚线所示的β=π+2γ时获得的二维拉东数据,是彼此相同的值。
下面,对如上所述的利用通过二维圆形轨道上的扫描获得的二维拉东数据(投影数据),再次构成被描绘物体f的图象用的计算方法进行说明。
首先对进行二维圆形轨道全扫描(下面根据需要,也简称为“FS”,FullScan)时的图象再次构成方法进行说明。对通过呈一圈转动形式进行扫描获得的二维拉东数据中相互冗余的数据,进行施加彼此相等权重的权重处理。如果用运算式表示,用下述的式(1)~式(5)表示。
【数学表达式1】
w(β,γ)=w(β+π+2γ,-γ)=1/2 式(1)
式(2)
L2(β,x,y)=(Rsinβ+x)2+(Rcosβ-y)2 式(5)
在此,式(1)是一个权重表达式,w(β、γ)表示的是作为权重使用的函数。式(2)~式(5)为进行等角度数据收集的扇型射束图象再次构成用的式,f(x,y)表示的是进行图象再次构成用的被描绘物体f的数据,g(γ)表示的是进行过滤处理用的函数,h(t)表示的是对函数g(γ)进行运算用的函数,L2(β,x,y)表示的是进行逆投影用的函数。
在上述式中,式(1)为权重处理的式。这种再次构成方法是一种二维逆拉东变换方法,一种可以对被描绘物体f的剖面图象进行正确再次构成用的方法。
下面对上述方法进行注意性说明。对通过圆形轨道上所需任意X射线焦点β收集到的投影数据p(β、γ),利用cosγ和上述式中的函数w(β、γ)进行权重处理(步骤1),利用上述式中的函数g(γ)对进行权重处理后的投影数据进行过滤处理(步骤2),通过上述式中的L2(β,x,y)对进行过滤处理后的数据进行权重处理,并进行锥形射束逆投影处理(步骤3)。通过对圆形轨道上的全部焦点β重复进行同样的步骤1~3的方式,对被描绘物体f的图象进行再次构成(步骤4)。
这种再次构成方法假定可以忽略下述影响:1)被描绘物体f是静止不动的,或即使有运动也小到可以忽略的程度,2)CT扫描装置的机械性能非常稳定,而且收集位置的几何学误差小到可以忽略的程度,3)被描绘物体f内杂散射线产生的影响小到可以忽略的程度,4)X射线焦点β和检测元件的尺寸很小(可以由相互的位置进行替代)。
因此,如果采用这种再次构成方法,可以通过对如式(1)所示的冗余数据进行均匀权重处理的方式,将噪音产生的误差减小到最小限度。在此,对于通过彼此不同的焦点β进行收集的两个相对射线(参见图8和图9),如果按照如上所述的假定,应该使其除光子噪音(photon noise)之外具有相同的线积分值。
图11为说明由上述圆形轨道全扫描FS获得的被描绘物体f的体层图象的时间敏感度分布曲线的图,其中横轴表示与时间相当的焦点β,纵轴表示权重函数w。在图11中,时间分辨率(与分布曲线中的半值宽度相对应),与X射线焦点β进行一圈转动的时间T相同。
下面对二维圆形轨道半扫描(下面根据需要,也简称为“HS”,Half Scan)的图象再次构成方法进行说明。对于通过如上所述的一次转动扫描方式进行圆形轨道全扫描FS时的场合,对二维拉东数据进行的是冗余性收集,而圆形轨道半扫描HS是一种为了将数据收集的冗余度减小至最小限度,在转动范围减小为一半的范围(π+2γm)内进行的扫描作业。
这种进行圆形轨道半扫描HS时的图象再次构成方法,可以将进行权重处理用的函数w(β、γ),仅使用在作为其一部分的冗余数据上(在观察方向β、射线方向γ上为连续的权重函数)。当采用运算式对此进行表示时,可用下(11)~式(14)进行表示。
【数学表达式2】
w(β、γ)=w(β+π+2γ,-γ)=1 式(11)
w[x(β、γ)]=3x2(β、γ)-2x3(β、γ) 式(12)
在此,求解f(x,y)用的式(14)中的焦点β的范围,由上述式(2)所示的范围改变为[0、2π]至[0、π+2γm]。对于这种场合,在β∈[π+2γm、2π]的范围内,有x2(β、γ)=w[x2(β、γ)]=0,所以可以由式(2)取代式(13)。
图13为说明所述圆形轨道半扫描HS的图象再次构成方法用的图。图14为其弦波图,图15表示由其获得的体层图象中央部处的时间敏感度分布曲线。
在图13中,位于圆形轨道外侧处的圆形曲线,表示的是各X射线焦点位置(投影角度)相对于中心射线(γ=0)的权重。例如,当X射线焦点β=0时,将通过全部彼此相对的射线对数据进行再次收集,所以权重为零,当X射线焦点由此开始移动时,在大部分射线处将进行二次收集,在其余射线处仅通过X射线焦点进行一次收集,所以可以对仅进行一次收集的射线设定其权重为1,对进行二次收集的射线,可以依据上述式(11)和“在观察方向β、射线方向γ上为连续的权重函数”的规则,按照能够进行平滑变化的方式设定其权重。
在此给出的扫描方式及其再次构成方法,其图象再次构成用的投影角度范围,即数据收集时间仅为进行一圈转动扫描时的大约一半,而且可以获得如图14所示的体层图象中央部的时间敏感度分布曲线,即获得相当好的、为T/2的时间分解率。而且在此,图12中的权重曲线,与图13中由弦波图表示的曲线相同。然而,采用这种方式提高时间分解率的代价,是使图象再次构成所需要的投影数(数据数,即光子数),减小至进行所述圆形轨道全扫描FS时的大约一半,因此图象噪音将增加至FS时的大约1.4倍。
关于与如上所述的“在观察方向β、射线方向γ上为连续的权重函数”,若补充说明其连续性的重要性,通过上式(2)和式(14)表示的再次构成运算,是沿射线方向对高频区域进行强调的卷集计算,当对其进行权重处理用的数据沿射线方向不连续时,会使这种不连续性强调至所需要的程度之上,所以在最终图象(再次构成的图象)中会残留有赝象痕迹。因此,为了能够避免被描绘物体f原有的、诸如X射线吸收函数等的不连续分布之外的不连续性产生影响,必须使权重函数在射线方向上具有连续性。
而且,对如上所述的二维圆形轨道半扫描HS方式进行扩张改进,对于不采用2γm而引入假定的扇型角度2Γm,使图象再次构成用的投影角度为π+2γm~2π、即采用二维圆形轨道改进型半扫描(在下面根据需要也简称为“MHS”,Modified Half Scan)再次构成方法(请参见“M.D.Silver:“A method forincluding redundant data in computed tomography”,Med.Phys.27,pp.773-774,2000”)的场合,时间分解率也能够达到T/2。
下面对进行二维圆形轨道欠扫描(下面根据需要,也简称“US”,UnderScan)时的图象再次构成方法进行说明。
前述FS中一圈转动扫描的收集开始时(β=0、t=0)至收集结束时(β=2π、t=T)的X射线焦点获得的数据,在二维拉东空间中非常接近,所以对于在一次转动扫描过程中被描绘物体有运动的场合,不再满足能够采用前述再次构成方法的假定条件之一,即不再满足“被描绘物体f是静止不动的,或即使运动也小到可以忽略的程度”的条件,由被描绘物体f运动产生的影响会使该值产生相当大的不同。当采用如前所述的、进行圆形轨道全扫描FS方式的再次构成方法时,这一影响会使数据产生矛盾,所以会产生由β=0的焦点位置扩展成扇型的赝象。
二维圆形轨道欠扫描US的再次构成中,为了能够对由如上所述的、被描绘物体运动所产生的赝象进行抑制,可以一并采用进行所述FS的再次构成的式(2),并且可以采用下述的式(21)和式(22)作为权重处理式。
【数学表达式3】
w(β、γ)+w(β+π+2γ,-γ)=1 式(21)
式(22)
图15为说明所述圆形轨道欠扫描US的图象再次构成方法用的图。图16表示其弦波图,图17表示由其获得的体层图象中央部的时间敏感度分布曲线。
在图15中,位于圆形轨道外侧处的圆形曲线,表示的是各X射线焦点位置(投影角度)相对于中心射线(γ=0)的权重。正如图15~图17所示,采用圆形轨道欠扫描US方式时,为了能够消除进行上述圆形轨道全扫描FS时出现的数据矛盾,需要减轻可信赖度比较低的数据(位于β=0、2π附近)的权重(降低权重),并且可以按照能够保持权重的连续性并且能够对所需要的二维拉东空间中的数据进行收集且进行均匀处理的方式,对其权重进行设定。
下面对进行二维圆形轨道过扫描(下面根据需要,也简称为“OS”,OverScan)时的图象再次构成方法进行说明。在此出于与进行所述圆形轨道欠扫描US时相同的考虑,进行超过一圈转动的扫描作业,并且在对通过相同投影角度(焦点位置)收集到的、进行一圈转动前、后的两个投影数据分别进行权重处理之后,再采用与实施所述圆形轨道全扫描FS时相类似的再次构成方法。这种场合的权重处理式可以由下式表示。
【数学表达式4】

式(23)
图18为说明所述圆形轨道过扫描OS的再次构成方法用的图。图19表示其弦波图。在图18中,位于圆形轨道外侧处的圆形曲线,表示的是各X射线焦点位置(投影角度)相对于中心射线(γ=0)的权重。正如图18和图19所示,对于这种场合的时间分解率为T。
2、对三维图象再次构成方法的回顾和存在的问题
下面从本发明人的角度出发,以对所述二维图象再次构成方法进行的回顾结果为基础,对目前已知的三维图象再次构成方法进行回顾,并明确所存在的问题。在此,可以采用诸如圆筒型检测器(检测元件等间距配置在圆筒表面上,在xy平面内进行沿射线方向等角度取样,在z轴方向上进行等距离取样),平面检测器(检测元件等间距配置在检测器表面上,进行等距离取样)等的、能够与各种计算方法相对吻合的检测器,作为二维检测器。
图20和图21为表示在三维坐标系中三维数据收集用的图。正如图20和图21所示,三维数据的收集可以利用由X射线焦点β给出的投影数据p(β、γ,α)(图中未示出),对沿着包含X射线焦点β的、作为面积分对象的平面Q的平面(在图20所示的实例中,为位于平面检测器上的直线L)进行积分获得的值进行处理,而且与在三维拉东空间中的点A(参见图21)处对三维拉东数据(ζ、φ、s)进行的收集相当。在此,β为投影角度(X射线焦点位置),γ为射线角度,α为锥形角度(xy平面与射线间的角度)。
因此如图22所示,可以通过由X射线焦点β照射出的锥形射束中的全部射线,对以X射线焦点β至坐标系中的坐标中心O(x=0,y=0,z=0)间距离为直径的球面上的三维拉东数据进行收集。在这时,与对所述二维数据收集时的场合相类似,这是一种使检测器元件呈离散形式配置在比较大限定范围(扇型角度)时的场合,并且是对所述球面上的某限定范围中的数据进行收集的
而且如图23所示,对于被描绘物体的支持体是半径为r的球体的场合,为了能够正确地实施三维图象再次构成,需要对与该球体相交或相接的全部表面进行面积分。
以上对三维数据的收集给予了示意性说明,下面对三维图象的再次构成方法进行说明。
首先对三维圆形轨道全扫描FS的再次构成方法进行说明。在此,是将如上所述的、二维圆形轨道全扫描FS的再次构成方法的方法论,简单地应用在三维场合,所以原作为使用平面检测器(检测元件在检测器表面上均匀等距分布,进行等距离取样)开发出的Feldkamp型再次构成方法(请参见“L.A.Feldkam,L.C.Davis,and J.W.Kress:“Practical cone-beam algorithm”,J.Opt.Soc.Am.,1(6),pp.612-619,1984”),也可以通过改进而使用圆筒检测器(请参见“H.Kudo and T.Ssito:“Three-dimensional helical-scancomputed tomography using cone-beam projection”,IEICE(D-II)J74-D-II,1108-1114(1991)”。下面在涉及这种场合中使用的方法时,为了与二维的场合中的“圆形轨道全扫描FS”相对应,也可以根据需要将其简称为“Feldkamp+FS”。
具体地讲,这种三维圆形轨道全扫描FS的再次构成方法,是对通过进行一圈转动扫描获得的三维拉东数据(投影数据)中彼此冗余的数据,进行施加彼此相等权重的权重处理的。当采用运算式对此进行表示时,可以利用下述的式(31)~式(35)进行表示。
【数学表达式5】
w(β,γ,α)=w(β+π+2γ,-γ,α)=1/2式(31)
L2(β,x,y)=(Rsinβ+x)2+(Rcosβ-y)2 式(35)
这些式(31)~式(35)与上述的二维FS时用的运算式(式(1)~式(5))相比,除了式(32)中的投影角度积分式(逆投影部分)由三维逆投影取代二维逆投影,增加了cosα项之外,均与前者相同。
下面对如上所述的方法进行示意性说明。对通过圆形轨道上所需任意X射线焦点β收集到的投影数据p(β、γ,α),利用cosγcosα和函数w(β,γ,α)进行权重处理(步骤1),利用上述式中的函数g(γ)对进行权重处理后的投影数据进行过滤处理(步骤2),通过上述式中的L2(β,x,y)对进行过滤处理后的数据进行权重处理,并进行三维锥形射束逆投影处理(步骤3)。通过对圆形轨道上的全部焦点β重复进行同样的步骤1~3的方式,对被描绘物体f的图象进行再次构成(步骤4)。
例如,当对位于z=0平面上的、以转动轴z为中心的圆形轨道进行一圈转动的扫描时,可以如图24所示,对使用包含所述图22中的焦点和坐标中心(转动轴)的球体(半径为r),覆盖着以其坐标中心为中心进行一圈转动时的全部轨迹的区域(下面为了说明方便,也称为“苹果状区域”)中的三维拉东数据,进行两次收集作业。即,在z=0的平面上,与实施二维圆形轨道全扫描FS时的场合相类似,其数据收集具有冗余性。
通过三维方式进行图象再次构成的被描绘物体,位于如上所述的图23中的半径为r的球体(支撑体)内,所以需要对覆盖该球体的区域中的数据进行收集作业,仅就此点而言,采用所述三维Feldkamp+FS方式收集到的是存在有丢失的数据。通过观察如图25所示的、利用图23和图24重叠构成的示意图,可以对此一目了然。即,为了能够对被描绘物体的支撑体进行图象再次构成,而采用Feldkamp+FS方式时,需要使用如图25所示的、覆盖着包含被描绘物体的球体的、呈苹果状的区域中的数据,然而如图24所示,位于苹果状区域芯部一侧的数据明显被丢失,因此采用这种方式,不能对所需要的全部三维数据进行收集(对于这种场合,所丢失的数据被称为“missing data”)。
采用这种三维Feldkamp+FS方式获得的体层图象的时间敏感度分布曲线,与前述图11中的相类似。
下面对实施三维圆形轨道半扫描时的再次构成方法进行说明。在此,与如上所述的、采用三维Feldkamp+FS的场合相类似,是将二维圆形轨道半扫描HS用的计算方法应用在三维场合。下面在涉及这种场合中使用的方法时,为了与二维场合中的“圆形轨道半扫描HS”相对应,也可以根据需要将其简称为“Feldkamp+HS”。
采用这种三维Feldkamp+HS方式时,可以对转动范围减少到一半的范围(π+2γm)的圆形轨道进行扫描,并且可以取在观察方向β、射线方向γ上为连续的权重函数进行权重处理。在这时的权重函数与锥形角度α的函数无关(对于整个检测器列乘以相同的权重)。当采用运算式对此进行表示时,可以利用下述的式(41)~式(44)进行表示。
【数学表达式6】
w(β、γ,α)=w(β+π+2γ,-γ,α)=1式(41)
w[x(β、γ),α]=3x2(β、γ)-2x3(β、γ)式(42)
图26为说明实施所述三维Feldkamp+HS时的数据收集作业用的图。正如图26所示,这种场合中的三维拉东数据,是通过对位于z=0平面上的、以转动轴z为中心、半径为R的圆形轨道上β=[0,π+2γm]的范围内进行扫描的方式,进行收集作业的。
图27表示的是对图23和图26进行重叠处理后获得的示意图。对图27和图26进行比较可知,采用三维Feldkmp+HS方法的场合,与采用如上所述的三维Feldkamp+FS方法的场合相比,三维拉东数据的丢失区域更大。在此是简单的将二维图象再次构成方法中使用的计算方法,应用于三维图象再次构成方法的。因此,当采用三维Feldkamp+HS时,虽然可以使再次构成的图象的时间分解率比较高,然而由于数据丢失区域过大,所产生的赝象痕迹也比实施三维Feldkamp+FS时强,所以存在有实用性不足的问题。
对于采用将Feldkamp型再次构成方法应用在如上所述的二维改进型圆形轨道半扫描(MHS)中,构成的Feldkamp改进型圆形轨道半扫描(Feldkamp+MHS)的场合,虽然所丢失的数据比采用Feldkamp+HS时少,然而对冗余性数据收集进行修正用的权重函数不是三维拉东数据,而且由于是依据二维拉东数据的收集位置进行的,所以位于扫描面以外的不正确点也将比Feldkamp+FS时增多,这与采用Feldkamp+HS时相类似。
下面对三维圆形轨道欠扫描US的再次构成方法进行说明。在此与采用所述三维Feldkamp+FS的场合相类似,是简单的将二维圆形轨道欠扫描US中的计算方法应用于三维场合的。下面在涉及这种场合中使用的方法时,为了与二维的场合中的“圆形轨道欠扫描US”相对应,也可以根据需要将其简称为“Feldkamp+US”。
当采用这种三维Feldkamp+US时,可以使用位于一圈转动扫描范围内的全部数据,而且对一部分数据的权重进行减轻处理,所以与采用Feldkamp+FS的场合相比,数据丢失将增多。而且存在有对于冗余性数据的收集作业,进行修正处理用的权重函数不是三维拉东数据,以及由于是依据二维拉东数据的收集位置进行的,所以位于扫描面以外的不正确点也将比采用Feldkamp+FS时增大的问题。
而且,对于采用将二维圆形轨道过扫描OS使用的计算方法简单的应用于三维场合,而获得的三维圆形轨道过扫描OS的再次构成方法(下面根据需要,也简称为“Feldkamp+OS”)的场合,三维拉东数据的获取率,与采用三维Feldkamp+FS方式时相类似,所以存在有时间分解率与FS相类似,达不到T的问题。
除了如上所述的三维图象再次构成方法之外,目前已知的还包括被称为“Grnatgeat方法”的计算方法。
这种Grnatgeat方法对于以被描绘物体的物体轴方向为界,检测器保持在其内的场合(被描绘物体是孤立物体,检测器对被描绘物体的全部投影数据进行收集的场合),如果用专门的术语描述就是,对于不是“Short-objectproblem采用detector truncation”的场合,如果焦点轨道满足Tuy数据必要条件,即满足“与被描绘物体的支撑体相交和相接的全部平面,至少一次与焦点轨道相交和相接”的条件时,可以进行正确的三维图象再次构成。因此,对于为圆形轨道的场合,可以获得与如上所述的Feldkamp+FS相类似的近似解。在这种Grnatgeat方法中使用的三维图象再次构成方法计算方法,可以通过下述的步骤1至步骤9表示。
首先,对通过焦点β收集到的投影数据p(β、γ,α)以cosγcosα进行权重处理,获得G(1)(β,γ,α)(步骤1)。
对于包含在所述焦点β位于其中的平面Q(ξ,φ,s)中的G(1)(β,γ,α)进行积分(通过平面检测器沿直线L进行线积分),获得权重面积分数据G(2)(ξ,φ,s)(步骤2)。
利用位于平面Q附近处的平面Q’(直线L’)上的数据对G(2)(ξ,φ,s)进行微分,获得三维拉东数据的一次微分数据P(2)(ξ,φ,s)(步骤3)。
随后,对由所述步骤(3)获得的三维拉东数据的一次微分数据进行三维拉东空间变换(rebinning)(步骤4)。
对全部焦点β应用如上所述的步骤1~步骤4(步骤5)。
对通过三维拉东空间形成的三维拉东数据的冗余度,进行除以收集这些拉东数据的转数M(ξ,φ,s)的倒数的修正处理(标准化处理)(M表示的是该平面与焦点轨道相交叉的点数)(步骤6)。
沿半径方向对一次微分数据进行微分,获得二次微分数据P(2)(ξ,φ,s)(步骤7)。
对该二次微分数据P(2)(ξ,φ,s)进行朝向平面Q(ξ,φ,s)的三维逆投影处理(步骤8)。
最后,对于全部所需要的三维拉东空间中的数据,重复进行所述步骤6~步骤8的运算,再次构成被描绘物体f的图象(步骤9)。
而且,除了如上所述的Grnatgeat方法之外,目前公知的其他三维再次构成方法,还包括除了所述rebinning(步骤4)之外,独立的对由各焦点收集到的数据进行处理的、被称为“shift-variant FBP(移位变形滤波逆投影,FBP:filtered backprojection)方法”的计算方法。
这种shift-variant FBP方法如果满足如上所述的、采用Grnatgeat方法时的条件(包含Tuy数据必要充分条件),则对于为圆形轨道的场合,可以构成为Feldkamp+FS方法(请参见“H.Kudo and T.Ssito:“Derivation andimplementation of a cone-beam reconstruction algorithm fornonplanar orbits”,IEEE Trans.Med.Imag.,MI-13,pp186-195,1994”,以及“M.Defrise and R.Clack:“A cone-beam reconstructionalgorithm using shift-variant filtering and cone-beambackprojection”,IEEE Trans.Med.Imag.,MI-13,pp186-195,1994”)。
图28(a)~图28(c)为说明所述shift-variant FBP方法用的图。其中图28(a)表示的是通过由焦点朝向平面检测器进行锥形射束投影产生的投影数据,获得再次投影数据阶段(步骤1~步骤2)用的示意图;图28(b)表示的是利用再次投影数据,通过该锥形射束逆投影方式获得再次构成数据阶段用的示意图(步骤3~步骤9);图28(c)表示的是利用平面检测器,通过Feldkamp方法进行逆投影的数据范围实例用的示意图。
下面通过步骤1~步骤9,对这种shift-variant FBP方法用的计算方法进行说明。
首先如图28(a)所示,对通过焦点β收集到的投影数据p(β,u,v)进行为cosγcosα的权重处理,获得G(2)(β,u,v)(步骤1)。
对于包含在所述焦点β位于其中的平面Q(ξ,φ,s)中的G(2)(β,u,v)进行积分(通过平面检测器沿直线L进行线积分),获得作为再次投影数据的权重面积分数据G(3)(ξ,φ,s)(步骤2)。
随后如图28(b)所示,利用位于平面Q附近处的平面Q’(直线L’)上的数据,对所述G(2)(ξ,φ,s)进行过滤处理(微分处理),获得三维拉东数据的一次微分数据P(4)(ξ,φ,s)(步骤3)。
通过将权重函数W乘以该P(4)(ξ,φ,s)的方式,获得对数据冗余度进行修正后的P(5)(ξ,φ,s)(步骤4)。沿着直线L将所述三维拉东数据的一次微分数据P(5)(ζ、φ、s),(二维)平行逆投影至检测器平面上(步骤5)。
对检测器平面上的全部角度应用如上所述的步骤2~步骤5,获得数据G(3)(β,u,v)(步骤6)。沿焦点轨迹的连接线方向(焦点的移动方向),对该数据G(3)(β,u,v)进行微分,以获得数据G(4)(β,u,v)(步骤7)。对数据G(4)(β,u,v)进行权重为L-2的权重处理,以进行(三维)锥形射束逆投影(步骤8)。
对全部焦点β应用如上所述的步骤1~步骤8,再次构成被描绘物体f(步骤9)的图象。
当采用运算式表示所述计算方法时,可以利用下述的式(51)~式(57)进行表示。
【数学表达式7】
式(52)
在此,函数W被称为冗余度修正函数,它与和检测器平面上的直线相对应的平面和焦点轨道间的交叉点数目M的倒数相当。即,这一函数W表示的是进行平滑处理用的交叉点数M。上面是以使用平面检测器的场合为例进行说明的,然而如前所述,本发明也可以采用圆筒型检测器。
对于将所述shift-variant FBP方法(FBP计算方法),应用在使用进行圆形轨道扫描时的三维图象再次构成方法中的场合,平面与焦点轨道间的交叉点数目通常为2。
【数学表达式8】
Wβ(r,θ)=1/2 式(58)
如果将上述式代入式(54),可以对式(51)~式(57)进行化简,从而可以复原成Feldkamp型再次构成用的式(32)。
而且,对于将所述shift-variant FBP方法用于由圆形和直线组合构成的扫描轨道的场合,可以在满足下述条件1~条件3时采用该计算方法。
1)对于属于仅仅与圆形轨道相交叉平面的数据,由于平面与焦点轨道的交叉点数目通常为2,所以可以按照与上述相类似的方式,将式(58)代入至式(54),从而使式(51)~式(57)复原成Feldkamp型再次构成用的式(32)(条件1)。
2)对于具有圆形轨道和直线轨道两者间交叉点的平面,通过圆形轨道收集到的数据可以代入至式(58);通过直线轨道收集到的数据可以代入至下式(条件2)。
【数学表达式9】
Wβ(r,θ)=0 式(59)
3)对于属于具有不与圆形轨道相交叉、仅与直线轨道交叉点的平面的数据,可以采用与直线轨道上交叉点数目相对应的冗余度修正函数Wβ(r,θ),并利用式(51)~式(57)进行处理。
通过上面的说明可知,三维图象再次构成用的冗余度修正函数Wβ(r,θ)和二维图象再次构成用的权重函数w(β,γ),均是为了实现对“n维拉东数据的冗余度进行修正”而设置的。
对于所述冗余度修正函数Wβ(r,θ)的设计方法而言,目前已经公开了shift-variant FBP方法的进一步改进方法(请参见“H.Kudo and T.Ssito:“An extended complteness condition for exact one-beamreconstruction and its application”,Conf.(Norfolk,VA)(NewYork:IEEE)1710-14”;H.Kudo and T.Ssito:“Fast and stableone-beam filtered backprojection method for non-planar orbits”,1998 Phys.Med.Biol.43,pp.747-760,1998等)。当采用这种方法时,可以按照与下述目的1、目的2相吻合的方式,设定冗余度修正函数Wβ(r,θ)。
1)采用专门术语描述长大型物体问题(Long-object problem)。即,对于对人体的一部分进行扫描的场合,为了能够使用沿体轴步进方向宽度比较窄小的检测器,对沿体轴方向比较长的被描绘物体的一部分进行扫描和再次构成,可以使与被描绘物体上突出的部分相对应的平面上的数据,施加权重为零的处理(目的1)。
2)使再次构成的计算误差最小化。对于存在有可以通过相同平面误差比较小的、沿水平方向的倾斜滤波(ramp filtering)方法进行处理的焦点,和需要通过误差比较大的shift-variant FBP方法进行处理的焦点的场合,可以使函数M不均等,即可以使与倾斜滤波(ramp filtering)方法相对应的数据权重比较大,与shift-variant FBP方法相对应的数据权重比较小(目的2)。
而且,目前已知的、对于实施螺旋扫描时能够进行正确的三维图象再次构成的方法,还包括所谓的“n-PI method”的方法(请参见R.Proksa et.al.:“The n-PI-method for helical cone-beam CT”,IEEE Trans.Med.Img.,19,848-863(2000))。其他的实施螺旋扫描的三维图象再次构成方法是对三维拉东数据进行冗余性收集,而该方法是按照1、3、5、7……的方式,对各三维拉东数据进行奇数收集的。因此,可以对具有冗余性的收集数据,依据冗余度修正函数Wβ(r,θ)(在所述Proksa的文献中为式(24),即为:
【数学表达式10】
,与这种场合的冗余度修正函数相当)进行权重处理、修正。
因此,通过对所述二维图象再次构成方法和三维图象再次构成方法分别进行的回顾可知,这些正确的三维图象再次构成中使用的冗余度修正函数W的设定方法,不是一个有关“收集时刻”的概念,也不是以“被描绘物体可能会产生运动”为前提条件的。因此,当将这些三维图象再次构成计算方法应用于医用CT时,由于作为被描绘物体的患者可能会产生运动,而在不考虑这种运动产生的影响时,就会生成赝象痕迹。而且,还难以满足提高时间分解率的需求。
3、本发明的三维图象再次构成方法的原理
本发明提供了一种三维图象再次构成方法,这种三维图象再次构成方法可以满足通过对所述二维图象再次构成方法和三维图象再次构成方法分别进行的回顾,而明确提出的、需要“能够消除由于作为被描绘物体的患者移动所产生的赝象且能够提高时间分解率”的需求。
为了能够实现这一目的,本发明提供的、如上所述的正确的三维图象再次构成方法,是依据与数据收集时刻有关的可信赖度对冗余度修正函数W进行设计的,并且可以利用这种设计出的冗余度修正函数W对三维拉东数据进行修正处理。
在此设计出的冗余度修正函数W,可以应用于数据收集具有冗余性的场合,即,如果采用对三维拉东数据进行若干次收集的扫描再次构成方法,就可以将本发明应用在这些方法中。而且如后所述,对于可以对可信赖度比较低的数据,进行积极减轻其对图象作用的场合,即使这些场合是数据收集不具有冗余性的再次构成场合,也可以利用如上所述的冗余度修正函数W进行修正处理。
利用这种冗余度修正函数W进行的修正处理,可以通过修正单元34分别对三维拉东数据,即对每一个作为对各拉东数据进行运算(面积分)的对象的平面Q进行。
在此所引入的冗余度修正函数Wβ(r,θ)的设计原则,可以由如下所述的规则1~规则3确定。
首先,对于在数据可信赖度函数T(β)比较大的数据收集时刻(或称数据收集范围)收集到的三维拉东数据,分别进行权重比交大的权重处理(规则1)。如果采用数学式表示,可以表示为下式。
【数学表达式11】
Wβ(r,θ)→大(large),当T(β)→大时,式(101)
对于在数据可信赖度函数T(β)比较小的数据收集时刻(或称数据收集范围)收集到的三维拉东数据,分别进行权重比较小的权重处理(规则2)。如果采用数学式表示,可以表示为下式。
【数学表达式12】
Wβ(r,θ)→小(small),当T(β)→小时,式(102)
下面先对规则1和规则2作更详细的说明。
例如,对于如上所述的X射线管10的焦点β沿着圆形轨道(全扫描)进行移动扫描的场合,可以假定存在有由该焦点β和二维X射线检测器11给出的、包含检测器平面上直线L的平面Q(即作为分别对三维拉东数据进行运算(面积分)的对象的平面)(参见图20)。即,对于这种场合,平面Q相对于圆形轨道平面具有有限倾斜,圆形轨道相对于平面Q在数据收集时刻不同的两个位置处形成交叉。通过对该平面Q进行面积分的方式,可以对一个点A处的拉东数据进行运算(参见图21)。因此,通过在两个位置处形成交叉的方式,可以对点A处的拉东数据进行两次收集。
这种平面与圆形轨道间的交叉状况,已经更清楚的示出在图33~图34的示意图中。在图中,参考标号t1、t2表示的是在相交叉两点处的数据收集时刻。而且在图33~图34中,其中图(b)表示的是沿横向方向A观察图(a)所示内容时的示意图。
例如,相对于如图33所示的数据收集时刻t1、t2,需要对数据收集的冗余性进行修正处理时,可以取一个数据收集时刻t1为获得图象的时刻,并且取该时刻作为基准进行三维拉东数据的再次构成处理,由于在时刻t1~t2间被描绘物体可能会产生运动,所以对于在另一数据收集时刻t2收集到的投影数据,可以推定其与在时刻t1收集到的投影数据相比时,可信赖度比较低。对于这种场合,可以使由在时刻t1收集到的投影数据运算出的拉东数据具有最大的可信赖度,同时对于由在时刻t2收集到的投影数据运算出的拉东数据,给予比时刻t1低的可信赖度,即施加比较低的权重。例如,这种场合中的时刻t1~时刻t2间的时间差越大,其权重的降低也越大。
对于为如图34所示的数据收集时刻t1、t2的场合,也可以对数据收集的冗余性进行修正处理,即也可以取位于两个时刻t1、时刻t2的中间时刻t0为获得图象的时刻,并且取该时刻作为基准,进行三维拉东数据的再次构成处理。对于这种场合,可以按照与时刻t0~时刻t1和时刻t0~时刻t2间的时间差(例如该时间差比较大时)相对应的方式,选择比较低的可信赖度,即施加比较低的权重。
而且,对于X射线管10的焦点β沿着圆形轨道(半扫描)进行移动扫描的场合,从数据收集的角度看,除了在一部分数据收集范围中会在两个位置处形成交叉之外,焦点β的轨道可能仅与平面Q在一个位置处形成交叉。图35给出了这种交叉形成用的一个示意图。图35(b)表示的是沿横向方向A观察图35(a)所示内容时的示意图。对于在一个位置处形成交叉的场合,数据收集不具有冗余性。时刻t1表示的是在交叉点处进行数据收集的时刻。在需要对数据收集的可信赖度进行修正时,可以取时刻t0为获得图象的时刻,并且以该时刻作为基准,进行三维拉东数据的再次构成处理。对于这种场合,可以按照与时刻t0~时刻t1间的绝对时间差相对应的方式(例如该时间差比较大时),选择比较低的可信赖度,即施加比较低的权重。
在实际上,可以按照与如后所述的扫描方法(即,X射线焦点β的移动轨迹)相对应的数据收集时刻t,确定其可信赖度函数T,并且可以按照利用由该可信赖度函数T获得的冗余度修正函数W进行权重处理的方式,进行如后所述的运算或称设定。
而且,最后一个规则是对于相同平面Q的权重积分,按照大于0小于1的方式,由数据可信赖度函数的积分进行设定(规则3)。如果采用数学式表示对其进行表示,可以表示为下式。
【数学表达式13】

式(103)
因此,当X射线焦点β沿着圆形轨道移动时,适用于该圆形轨道的数据可信赖度函数T(β),可以依据由下式(104)和式(105)表示的收集时刻进行设定。
【数学表达式14】
T(β)=3x2(β)-2x3(β) 式(104)
当对上述规则1和规则2进行具体化处理时,可以由下式(106)进行表示。
【数学表达式15】
式(106)
(有关数据可信赖度函数的实例)
作为本实施方案的数据可信赖度函数,可以依据其扫描形式(例如为圆形扫描、直线扫描、螺旋扫描等)进行适当设定,下面参考图30~图32对其一个实例进行说明。
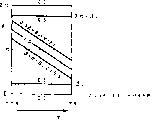
图30为说明对于扫描形式为对由直线轨道和呈一圈转动形式的圆形轨道构成的轨道进行扫描的场合,数据可信赖度函数T(β)或T(t)的实例用的图。
对于这种场合中的扫描轨道,可以如图30中的上段曲线(纵轴:扫描轨道Z,横轴:时间t=β)所示,由在沿直线方向(Z轴方向、转动轴方向或称体层方向)上的预定区间(Z=ZS~ZE,tS~tE)中实施直线扫描,随后在与直线方向相接的一定位置(Z=ZC)处进行沿圆周方向的一圈转动(β=0~2π)的圆形扫描构成。
例如,对于这种扫描轨道的数据可信赖度函数T(t)或T(β),可以如图30中的中段曲线(纵轴:T(t)或T(β),横轴:t或β)所示,将实施圆形扫描的中心部(β=π)设定为具有最高可信赖度的位置。对于这种场合,函数T(t)或T(β)在进行扫描的始点和终点、即在进行直线扫描的始点ZC(t=tS)和进行圆形扫描的终点(β=2π)为最低,在两者之间可以呈由直线扫描的始点ZC经由其终点ZE(t=tE),再经由圆形扫描的始点(t=0)朝向中心部(β=π)连续增大,在到达圆形扫描中心部(β=π)时达到最大,进而由该峰值朝向圆形扫描的终点(β=2π)连续减小的曲线形式。
除此之外,所述扫描轨道中的数据可信赖度函数T(t)或T(β),还可以如图30中的下段曲线(纵轴:T(t)或T(β),横轴:t或β)所示,按与上述场合相类似的方式,将圆形扫描的中心部(β=π)设定为具有最高的可信赖度,并且将位于直线扫描和圆形扫描的始点、终点(t=tC)处的可信赖度,降低至大体相同的程度。
如果采用如图30所示的实例,对于扫描形式为沿直线和沿圆形轨道进行一圈扫描的场合,可以通过适当的锥形射束CT方式,构造出三维图象再次构成用计算方法,而且采用这种构成方法,还可以最大限度的发挥上述效果,从而可以进一步降低由于被描绘物体运动而产生的赝象的效果。
而且,对于如所述图30所示的场合,是以扫描形式为按照直线轨道和圆形轨道的顺序进行一次扫描的场合为例进行说明的,然而也可以先进行一次圆形轨道的扫描,随后再进行一次沿直线轨道的扫描。对于这种场合的可信赖度函数,可以呈与如所述图30中的中段或下段所示的可信赖度函数相类似但时间顺序相反的形式。
而且,如上所述的、由直线轨道和圆形轨道组合构成的扫描作业,还可以重复进行若干次。
图31为说明对于扫描形式为由若干次连续转动的圆形轨道扫描构成的场合,数据可信赖度函数T(β)或T(t)的一个设定实例用的图。
对于这种场合中的扫描轨道,可以如图31中的最上段曲线(纵轴:扫描轨道Z,横轴:时间t=β)所示,由在沿直线方向上预定位置处沿圆周方向进行连续转动的圆形扫描轨道(β=0~2π~4π~6π)构成。对于这种扫描轨道的数据可信赖度函数T(β)或T(t),可以分别如图31中的中间两段曲线~最下段曲线(纵轴:T(β)或T(t),横轴:t或β)所示,在每圈圆形扫描的预定区域中取其中央部(在图31所示的实例中,对于β=0~2π的区域为β=π;对于β=π~3π的区域为β=2π;对于β=2π~4π的区域为β=3π)为具有最高的可信赖度。
如果采用如图31所示的实例,对于扫描形式为进行若干圈的连续圆形轨道扫描的场合,可以通过适当的锥形射束CT方式构造出三维图象再次构成用计算方法,而且采用这种构成方法,可以最大限度的发挥上述效果,从而可以进一步降低由于被描绘物体运动而产生的赝象的效果。
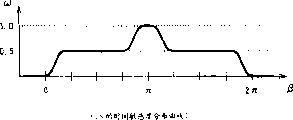
图32为说明对于扫描形式为进行螺旋扫描的场合,数据可信赖度函数T(β)或T(t)的一个实例用的图。
对于这种场合中的扫描轨道,可以如图32中的最上段曲线(纵轴:扫描轨道Z,横轴:时间t=β)所示,由一边改变其直线位置一边进行圆形扫描的螺旋扫描(Z=Z1~Z2~Z3~Z4,t=t1~t2~t3~t4)轨道构成。对于这种扫描轨道的数据可信赖度函数T(β)或T(t),可以如图32中的中间两段曲线~最下段曲线(纵轴:T(β)或T(t),横轴:t或β)所示,对进行每圈螺旋扫描的预定区域中取其中央区域(在图32所示的实例中,对于上限小于t=t3的区域为t=t1~t2;对于t=t1~t4的区域为t=t2;对于上限大于t=t4的区域为t=t3~t4),为具有最高的可信赖度的位置(呈大体为梯形的曲线形式)。
如果采用如图32所示的实例,对于扫描形式为进行螺旋扫描的场合,可以通过适当的锥形射束CT方式,构造出三维图象再次构成用计算方法,而且采用这种构成方法,可以最大限度的发挥上述效果,从而可以进一步降低由于被描绘物体运动而产生的赝象的效果。
对于本实施方案,如上所述的可信赖度函数T可以应用式(106),作为冗余度修正函数W进行计算。依据这种修正函数W确定的权重,可以利用修正单元34和再次构成单元36进行求解,所以在需要进行各种修正运算时,可以根据式(106)等的式进行运算,并且可以根据储存在修正单元34内的内装储存器或数据保存单元35中的储存数据表格,进行求解运算处理。
下面对这种设定权重的顺序进行概略说明。首先,设定扫描轨道(例如为圆形轨道,直线轨道和圆形轨道构成的组合轨道等),以及获得图象(再次构成图象)用的时刻。相时于每个平面Q,确定扫描轨道与平面Q相交叉的收集时刻(观测时刻)。即,设定相对于每个平面Q的收集观测时刻。从另一个角度来说就是,对通过观测时刻进行收集的平面Q进行若干次设定。因此,对于各个平面Q,可以区分开由同一平面收集到的、属于其他观测时刻的数据。随后,由形成交叉的收集时刻和通过如上所述的方式获得图象的时刻间的时间关系,设定数据的可信赖度。将按照这种方式设定的可信赖度应用于冗余度修正函数,确定出与可信赖度相对应的权重。采用这种方式,可以对在与获得图象的时刻相接近的时刻收集到的数据,设定比较大的权重,对在与获得图象的时刻相离比较远的时刻收集到的数据,设定呈相对比较小的权重。
而且,这种设定作业可以与三维图象再次构成处理同时进行,也可以在适当的时间提前进行。
下面对于使用依据这种设定思路求解出的冗余度修正函数W,通过可实际使用的三维图象再次构成计算方法进行图象再次构成处理的方式进行说明。
(shift-variant FBP方法之一)
下面对使用作为三维图象再次构成计算方法的shift-variant FBP方法的一个实例进行说明。对于这种场合进行的处理作业,可以按照如图36所示的步骤S101a~步骤S110的顺序,通过修正单元34和再次构成单元36的协调动作进行。
首先,指定预定的收集时刻(步骤S101a),指定检测器平面上的预定角度(步骤S101b),对在该焦点β和检测器平面上的角度位置(即与积分对象平面相当)所收集到的投影数据p(β,u,v)以权重为cosγcosα进行权重处理,以获得G(2)(β,u,v)(步骤S102)。
对于包含在焦点位于其中的平面Q(ξ,,s)中的G(2)(β,γ,α)进行积分(通过平面检测器沿直线L进行线积分),获得权重处理面积分数据G(3)(ξ,,s)(步骤S103)。
利用位于平面Q附近处的平面Q’(直线L’)上的数据,对所述G(3)(ξ,,s)进行过滤处理(微分处理),获得三维拉东数据的一次微分数据P(4)(ξ,,s)(步骤S104)。
乘以基于通过所述式(101)~式(106)求解出的可信赖度函数T(β)得到的权重函数Wβ(r,θ),获得对数据冗余度进行修正后的P(5)(ξ,,s)(步骤S105)。
沿着直线L将所述三维拉东数据的一次微分数据P(5)(ξ,,s),(二维)平行逆投影至检测器平面上(步骤S106)。
随后,对检测器平面上的全部角度进行如上所述的步骤S101b~步骤S106所述的处理作业,获得数据G(3)(β,u,v)(步骤S107)。
沿焦点轨迹的连接线方向(焦点的移动方向),对该数据G(3)(β,u,v)进行微分处理,以获得数据G(4)(β,u,v)(步骤S108)。
对数据G(4)(β,u,v)进行权重为L-2的权重处理,以进行(三维)锥形射束逆投影(步骤S109)。
对全部焦点β进行如上所述的步骤S101a~步骤S109的处理作业,再次构成被描绘物体f(步骤S110)。
当采用运算式表示所述的这种计算方法时,可以利用下述的式(111)~式(117)进行表示。
【数学表达式16】
式(112)
当采用本实例时,可信赖度函数T(β)和冗余性修正函数Wβ(r,θ)可能为负值,并可以进行所允许的外插处理,所以当为零值的区域比较大且可信赖的区域比较窄小时,能够进一步提高时间分解率(以牺牲数据获取率为代价)。
(X射线焦点沿由直线和圆周组合构成的轨道移动并进行扫描)
下面对在X射线焦点沿由直线和圆周组合构成的轨道移动并进行扫描时的再次构成方法中,应用如上所述的冗余性修正函数W的一个实例进行说明。
首先利用下式(121)和式(122),对焦点轨道λ(β)进行定义。
【数学表达式17】

其中,n=整数。
下面对使用位于由下式(123)所示范围内的数据,对被描绘物体f进行图象再次构成的场合进行说明。
【数学表达式18】
式(123)
对于这种场合,数据的可信赖度函数T(β)和冗余性修正函数Wβ(r,θ),可以分别由下式(124)和式(125)进行定义。
【数学表达式19】
Wβ(r,θ)=T2(β) 式(124)
式(125)
如上所述,作为本实例的三维图象再次构成方法,还可以适用于如上所述的、诸如Grnatgeat方法和n-PI method方法等的各种三维图象再次构成用计算方法。即使对于数据收集不具有冗余性的再次构成方法,只要是诸如“能够减轻不具有可信赖度的数据的权重,从而在数据获取率低下时仍可获得良好结果”的场合,仍可以按照基本满足所述规则1~规则3、即满足“依据数据可信赖度对三维拉东数据施加权重,并且使对于相同三维拉东数据的权重总和位于0~1之间的”的方式,应用本发明给出的方法。
而且,可以作为本实例的三维图象再次构成方法中使用的检测器的形状,可以呈诸如平面检测器、圆形检测器、球面型检测器等各种适当的形状。
(shift-variant FBP方法之二)
图29为表示本实例的几何学关系用的示意图。在如图29所示的检测器平面上的几何学关系中,由朝向该检测器平面上的点(u,v)的焦点β的锥形射束顶点位置s(β)(参考标号s表示的是矢量),进行锥形射束投影的投影数据g(u,v,β),可以通过下式(129)和式(130)、按照沿圆形轨道运行的运算求解出。
【数学表达式20】
s(β)=(Rcosβ,Rsinβ,0)T 式(130)
在此,f(r)(参考标号r表示的是矢量)表示的是进行图象再次构成的被描绘物体,参考标号R表示的是圆形轨道的半径,参考标号αu,v,β表示的是单位矢量。
在所述几何学关系中,作为本实施例的三维图象再次构成计算方法可以:1)对数据可信赖度函数T(β)进行定义,2)依据三维拉东数据的数据可信赖度函数T(β),对冗余性修正函数w(s,μ,β)进行运算,3)对冗余性修正函数w(s,μ,β)进行移位变形滤波逆投影(shift-variant FBP)处理。下面对上述内容依次进行说明。
首先,可以通过下式(131)和式(132),按照1)T(β-β0)与|β-β0|同时减小,2)T(β)/β具有连续性的选择规则,对数据可信赖度函数T(β)进行定义。
【数学表达式21】
T(β-β0)=3x2(β-β0)-2x3(β-β0)式(131)
x(β)=1-|β/π| 式(132)
其次,可以通过下式(133)和式(134),按照1)冗余性修正函数w(s,μ,β)与数据可信赖度函数T(β)同时增大,2)相同三维拉东平面中的冗余性修正函数w(s,μ,β)总和等于1,3)冗余性修正函数w(s,μ,β)在s、u坐标系中具有连续性的选择规则,对冗余性修正函数w(s,μ,β)进行定义。
【数学表达式22】
式(133)
W(s,μ,β)=We(s,μ,β)*smooth(s,u) 式(134)
下面依据如图37所示的步骤S121~步骤S126,将通过上述方式求解出的冗余性修正函数w(s,μ,β)应用在shift-variant FBP方法中,对被描绘物体f进行图象再次构成处理。而且,如图37所示的一连串处理,可以通过修正单元34和再次构成单元36的协同动作进行。
首先,对预定的收集时刻和检测器平面上的位置进行指定(步骤S121,步骤S122)。通过下式(135)进行权重处理(步骤S123)。
【数学表达式23】
随后,进行移位变形滤波(shift-variant filtering)处理(步骤S124)。该步骤S124由子步骤S124a~步骤S124d构成。
利用下式(136)对三维拉东数据进行面积分运算(子步骤S124a)。
【数学表达式24】
利用下式(137)进行冗余性修正处理(子步骤S124b)。相对于设定在检测平面上的全部射线(即作为面积分对象的整个平面),依次进行这些处理作业(子步骤S124c)。
【数学表达式25】
SW(s,μ,β)=W(s,μ,β)·S(s,μ,β)
式(137)
利用下式(138),进行二维逆投影处理和沿μ轴的微分处理(子步骤S124d)。
【数学表达式26】
进行锥形射束逆投影处理,对被描绘物体f进行图象再次构成(步骤S125)。对与全部X射线焦点β相关的所需要数据收集范围之内的全部位置,重复进行以上处理作业(步骤S126)。
对于具有如上所述构成形式的X射线CT扫描装置,可以通过R-R方式驱动X射线管10和二维检测器11转动,并且通过诸如多路扫描或螺旋扫描等扫描方法进行X射线投影。在该转动驱动的过程中,由X射线管10给出的X射线将连续地朝向被检测物体P进行曝光照射。这种连续的X射线可以通过预准直器22整形为圆锥形状,并且作为锥形射束照射在被检测物体P上。利用二维检测器11对透射过被检测物体P的X射线进行检测、读取。通过这种方式读取出的投影数据,通过数据传送部28传送至修正单元34处,在进行各种修正处理之后,按照与各观察点相关的形式保存在数据保存单元35中。
再次构成单元36依据如上所述的各种三维图象再次构成方法中的计算方法(例如由所述步骤S101a~步骤S110所示的计算方法),对这种保存数据进行图象处理,制作出被检测物体P的再次构成图象,而且可以依据主控制器30给出的控制指令,在需要时将其保存在数据保存单元35处,且将其传送至显示处理器37处,由显示处理器37进行诸如彩色处理、高性能计算机计算数据和扫描信息的重叠处理等所需要的处理,由显示器38进行数字/模拟(D/A)变换,以作为体层图象或体积(三维图象)进行显示。
如上所述,如果采用所述扇型射束的改进型圆形轨道半扫描(MHS)(二维圆形轨道用的改进型(modified)半扫描)方法,可以在假定扇型角度2Γm等于π时,对三维拉东数据进行同样的权重处理,从而可以获得与焦点转动平面(z=0的平面)的二维扇型射束再次构成方法中的改进型圆形轨道半扫描(MHS)(2Γm=π)相同的技术效果。即,这种方法可以具有:1)可以依据可信赖度将三维拉东数据的数据获取率取为合理的值,2)可以将时间分解率提高至T/2,3)可以通过锥形角度比较小的区域确保其正确性,4)能够确保权重函数的连续性,所以不会产生赝象等的优点。
因此,如果采用本实施方案,可以在将锥形射束CT的三维图象再次构成方法应用于医用CT时,降低由于被描绘物体移动所产生的赝象痕迹,并且可以提高时间分解率。
而且,在本实施方案和应用实例中,是以X射线CT扫描装置为第三代CT装置的场合为例进行说明,然而本发明还可以使用在诸如第四代CT装置、可以进行高速扫描的多管球CT装置(在第三代CT中设置在若干个X射线管和检测器对的CT装置)、第五代CT装置(不再配置有X射线管,通过对形成为环状的靶体进行电子束冲击位置进行改变的方式,转动X射线焦点的CT装置)等的各种X射线CT扫描装置中。而且,所使用的X射线检测器的形状,也并不仅限于平面型,还可以采用呈诸如圆筒型等的其他形状检测器。
本发明并不仅限于以举例形式描述的上述实施方案和应用实例,本领域的普通技术人员可以依据权利要求所请求保护的技术内容,在不脱离本发明主题的范围内,进行种种变形和变更,这些均属于本发明请求保护的技术范围之内。
通过上述说明可知,如果采用本发明,在将锥形射束CT的三维图象再次构成计算方法应用于医用CT装置时,可以降低由于被描绘物体移动所产生的赝象痕迹,并且可以提高时间分解率。
Claims (21)
1.一种X射线CT装置,其特征在于,包括:
发射锥形射束形状的X射线的X射线源;
对由该X射线源发射的且透射过被检测物体的X射线进行检测,并且输出与该X射线量相对应的投影数据用的二维X射线检测器;
通过至少使所述X射线源沿着一定轨道移动而进行所需扫描的方式,在一定扫描范围内使用由该X射线源发射的X射线对被检测物体进行扫描,并且通过所述X射线检测器对由于该扫描形成的所述投影数据进行收集的扫描单元;
依据由该扫描单元收集到的投影数据生成呈三维分布形式的三维拉东数据用的拉东数据生成单元;
对于通过这种拉东数据生成单元生成的三维拉东数据,利用作为与所述投影数据收集时刻的可信赖度对应的权重函数的、在代表再次构成图象的时刻的数据收集时刻为最大权重,在远离该数据收集时刻的数据收集时刻为比较小权重的权重函数,进行权重处理用的权重处理单元;
利用由这种权重处理单元进行过权重处理的三维拉东数据,通过所需要的三维图象再次构成计算方法获得再次构成图象用的图象再次构成单元。
2.如权利要求1所述的X射线CT装置,其特征在于:所述权重处理单元按照分别与作为求解各所述三维拉东数据用的面积分的对象的平面相对应的方式,进行所述权重处理用。
3.如权利要求2所述的X射线CT装置,其特征在于:所述权重处理单元采用所述权重函数,对与在所述扫描范围收集到的投影数据相对应的三维拉东数据进行权重处理。
4.如权利要求1所述的X射线CT装置,其特征在于:所述权重函数为随着从所述数据收集时刻离开而使权重减小的权重函数。
5.如权利要求1或2所述的X射线CT装置,其特征在于:所述权重函数按照所述扫描方式的种类进行设定。
6.如权利要求5所述的X射线CT装置,其特征在于:所述扫描方式是,所述轨道为沿着呈一圈转动形式构成的圆形轨道移动的圆形轨道全扫描方式;所述轨道为沿着呈一圈转动形式构成的圆形轨道移动且在360度的扫描范围内获得投影数据的改进型圆形轨道半扫描方式;所述轨道为沿着呈一圈转动形式构成的圆形轨道移动的圆形轨道欠扫描方式;所述轨道为沿着呈两圈以上转动形式构成的圆形轨道移动的圆形轨道扫描方式;所述轨道为沿着由直线轨道和圆形轨道组合构成的轨道移动的扫描方式;或者所述轨道为沿着螺旋轨道移动的螺旋扫描方式。
7.如权利要求6所述的X射线CT装置,其特征在于:
所述扫描方式为沿着由直线轨道和圆形轨道按该顺序组合构成的所述轨道移动,并且对所述被检测物体进行一次扫描的扫描方式;
所述权重处理单元为,作为所述权重函数,采用在代表由所述图象再次构成单元进行再次构成图象的时刻的数据收集时刻以及与该数据收集时刻相接近的时刻为最大权重,在开始沿直线轨道移动时的数据收集时刻和结束沿所述圆形轨道移动时的数据收集时刻为最小权重的权重函数,对与在所述扫描范围收集到的投影数据相对应的三维拉东数据进行所述权重处理的单元。
8.如权利要求6所述的X射线CT装置,其特征在于:
所述扫描方式为沿着由直线轨道和圆形轨道按该顺序组合构成的所述轨道移动,并且对所述被检测物体进行一次扫描的扫描方式;
所述权重处理单元为,作为所述权重函数,采用在代表由所述图象再次构成单元进行再次构成图象的时刻的数据收集时刻以及与该数据收集时刻相接近的时刻为最大权重,在开始沿圆形轨道移动时的数据收集时刻和结束沿所述圆形轨道移动时的数据收集时刻为最小权重的权重函数,对与在所述扫描范围收集到的投影数据相对应的三维拉东数据进行所述权重处理的单元。
9.如权利要求7或8所述的X射线CT装置,其特征在于:所述权重函数为对所述整个直线轨道和所述数据收集时刻为所述最小权重的权重函数。
10.如权利要求6所述的X射线CT装置,其特征在于:
所述扫描方式为沿着由圆形轨道和直线轨道按该顺序组合构成的所述轨道移动,并且对所述被检测物体进行一次扫描的扫描方式;
所述权重处理单元为,作为所述权重函数,采用在代表由所述图象再次构成单元进行再次构成图象的时刻的数据收集时刻以及与该数据收集时刻相接近的时刻为最大权重,对于在开始沿圆形轨道移动时的数据收集时刻和结束沿所述直线轨道移动时的数据收集时刻为最小权重的权重函数,对与在所述扫描范围收集到的投影数据相对应的三维拉东数据进行所述权重处理的单元。
11.如权利要求6所述的X射线CT装置,其特征在于:
所述扫描方式为沿着由直线轨道和圆形轨道组合构成的所述轨道移动,并且对所述独检测物体进行若干次扫描的扫描方式;
所述权重处理单元为,对于所述若干次扫描的数据收集时间带中的每个预定周期进行的若干次所述三维拉东数据的生成,在所述若干次扫描中的每个预定周期,作为所述权重函数,采用在代表由所述图象再次构成单元进行再次构成图象的时刻的数据收集时刻以及与该数据收集时刻相接近的时刻为最大权重,在该预定周期开始时和结束时的数据收集时刻为最小权重的权重函数,对与在所述扫描范围收集到的投影数据相对应的三维拉东数据进行所述权重处理的单元。
12.如权利要求6所述的X射线CT装置,其特征在于:
所述扫描方式为沿着转动两圈以上的圆形轨道移动,并且对所述被检测物体进行若干次扫描的扫描方式;
所述权重处理单元为,对于与所述若干次扫描相对应的每一次扫描,作为所述权重函数,采用在代表由所述图象再次构成单元进行再次构成图象的时刻的数据收集时刻为最大权重,在远离该数据收集时刻的数据收集时刻为比较小权重的权重函数,对与在所述扫描范围收集到的投影数据相对应的三维拉东数据进行所述权重处理的单元。
13.如权利要求6所述的X射线CT装置,其特征在于:
所述扫描方式为所述螺旋扫描方式;
所述权重处理单元为对于通过所述螺旋扫描方式生成的三维拉东数据,在进行图象再次构成所需要的每个数据收集时间带,作为所述权重函数,采用在以代表该数据收集时间带中的三维拉东数据的数据收集时刻为中心的一定时间里,使权重呈一定值且为最大,在该数据收集时间带开始时和结束时的数据收集时刻为最小权重的权重函数,对与在所述扫描范围收集到的投影数据相对应的三维拉东数据进行所述权重处理的单元。
14.如权利要求2所述的X射线CT装置,其特征在于:还具有依据对各所述平面按照所述投影数据收集时刻预先确定的该投影数据的可信赖度,确定所述权重函数,并且将由该权重函数给出的权重信息提供至各所述平面处的提供单元。
15.一种X射线CT的三维图象再次构成方法,其特征在于包括:
用由X射线源发射的呈锥形射束形状的X射线对被检测物体一边照射一边扫描;
通过伴随着所述扫描对从所述被检测物体透过的X射线进行检测和收集,对所述被检测物体的二维投影数据进行收集;
利用收集到的投影数据生成三维分布的三维拉东数据;
使用作为反映按照所述投影数据收集时刻预先确定的该投影数据的可信赖度的权重函数的、在代表再次构成图象的时刻的数据收集时刻为最大权重,在远离该数据收集时刻的数据收集时刻为比较小权重的权重函数,对所述三维拉东数据进行修正;以及
对该修正后的三维拉东数据进行三维图象再次构成计算方法的处理,再次构成所述被检测物体的三维图象数据。
16.如权利要求15所述的X射线CT的三维图象再次构成方法,其特征在于:使用所述权重函数对所述三维拉东数据进行的修正,按照分别与作为求解所述三维拉东数据用的面积分的对象的平面相对应的方式进行的。
17.如权利要求16所述的X射线CT的三维图象再次构成方法,其特征在于:
所述投影数据的可信赖度,是与拉东X射线锥形射束的焦点位置相对应的数据可信赖度函数;
所述权重函数是与所述数据的可信赖度相对应的冗余性修正函数。
18.如权利要求17所述的X射线CT的三维图象再次构成方法,其特征在于:所述数据可信赖度函数,是按照与X射线扫描方式相对应的方式设定的。
19.如权利要求18所述的X射线CT的三维图象再次构成方法,其特征在于:所述锥形射束形状的X射线的扫描方式,是沿着呈一圈转动形式构成的圆形轨道移动的圆形轨道全扫描方式;沿着呈一圈转动形式构成的圆形轨道移动且在360度的扫描范围内获得投影数据的改进型圆形轨道半扫描方式;沿着呈一圈转动形式构成的圆形轨道移动的圆形轨道欠扫描方式;沿着呈两圈以上转动形式构成的圆形轨道移动的圆形轨道扫描方式;沿着由直线轨道和圆形轨道组合构成的轨道移动的扫描方式;或者沿着螺旋轨道移动的螺旋扫描方式。
20.一种X射线CT的权重设定方法,其特征在于,包括:
用由X射线源发射的呈锥形射束形状的X射线对被检测物体一边照射一边扫描;
通过伴随着所述扫描对从所述被检测物体透过的X射线进行检测和收集,对所述被检测物体的二维投影数据进行收集;
依据所述二维投影数据的收集时刻求出该投影数据的可信赖度;以及
为了对由所述投影数据生成的三维分布的三维拉东数据进行修正,依据所述投影数据的可信赖度,确定在代表再次构成图象的时刻的数据收集时刻为最大权重,在远离该数据收集时刻的数据收集时刻为比较小权重的权重处理。
21.如权利要求20所述的X射线CT的权重设定方法,其特征在于:
确定所述数据可信赖度的步骤,为对与所述数据收集时刻对应的数据可信赖度函数进行运算的步骤;
确定所述权重处理的步骤,为对与所述数据可信赖度函数对应的冗余性修正函数的值进行运算的步骤。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2001327789 | 2001-10-25 | ||
| JP327789/2001 | 2001-10-25 | ||
| JP2002301432A JP4282302B2 (ja) | 2001-10-25 | 2002-10-16 | X線ct装置 |
| JP301432/2002 | 2002-10-16 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN1437914A CN1437914A (zh) | 2003-08-27 |
| CN1289034C true CN1289034C (zh) | 2006-12-13 |
Family
ID=27666496
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN02151818.1A Expired - Fee Related CN1289034C (zh) | 2001-10-25 | 2002-10-25 | X射线ct装置、三维图象再次构成方法及权重设定方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6907100B2 (zh) |
| JP (1) | JP4282302B2 (zh) |
| CN (1) | CN1289034C (zh) |
Families Citing this family (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7672426B2 (en) * | 2002-12-04 | 2010-03-02 | Varian Medical Systems, Inc. | Radiation scanning units with reduced detector requirements |
| US7189000B2 (en) * | 2003-12-22 | 2007-03-13 | Kabushiki Kaisha Toshiba | Image-quality control system |
| US7250949B2 (en) * | 2003-12-23 | 2007-07-31 | General Electric Company | Method and system for visualizing three-dimensional data |
| JP4498023B2 (ja) * | 2004-06-15 | 2010-07-07 | キヤノン株式会社 | X線ct装置 |
| US7660382B2 (en) * | 2004-06-28 | 2010-02-09 | Koninklijke Philips Electronics N.V. | Examination apparatus for perfusion studies |
| CN101039622B (zh) * | 2004-10-11 | 2011-09-07 | 皇家飞利浦电子股份有限公司 | 产生高质量x射线投影的成像系统 |
| WO2006040713A1 (en) * | 2004-10-15 | 2006-04-20 | Philips Intellectual Property & Standards Gmbh | Computer tomography method |
| WO2006073584A2 (en) * | 2004-11-24 | 2006-07-13 | Wisconsin Alumni Research Foundation | Cone-beam filtered backprojection image reconstruction method for short trajectories |
| FI20055168A0 (fi) * | 2005-04-13 | 2005-04-13 | Gen Electric | Tomografiamenetelmä |
| US7991558B2 (en) * | 2005-09-29 | 2011-08-02 | Roche Molecular Systems, Inc. | Systems and methods for determining real-time PCR cycle thresholds using cluster analysis |
| CN100447816C (zh) * | 2005-12-31 | 2008-12-31 | 清华大学 | Ct投影数据三维解析模拟方法 |
| US7831012B2 (en) * | 2006-02-09 | 2010-11-09 | L-3 Communications Security and Detection Systems Inc. | Radiation scanning systems and methods |
| US9339243B2 (en) | 2006-04-14 | 2016-05-17 | William Beaumont Hospital | Image guided radiotherapy with dual source and dual detector arrays tetrahedron beam computed tomography |
| US8983024B2 (en) | 2006-04-14 | 2015-03-17 | William Beaumont Hospital | Tetrahedron beam computed tomography with multiple detectors and/or source arrays |
| EP2010058B1 (en) * | 2006-04-14 | 2017-05-17 | William Beaumont Hospital | Computed Tomography System and Method |
| EP1986551A1 (en) * | 2006-04-19 | 2008-11-05 | Philips Intellectual Property & Standards GmbH | Cone beam computed tomography with multiple partial scanning trajectories |
| CA2905989C (en) * | 2006-05-25 | 2017-01-24 | Di Yan | Real-time, on-line and offline treatment dose tracking and feedback process for volumetric image guided adaptive radiotherapy |
| JP4322894B2 (ja) * | 2006-06-20 | 2009-09-02 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | X線ct装置 |
| US7995819B2 (en) * | 2006-10-30 | 2011-08-09 | General Electric Company | Methods for displaying a location of a point of interest on a 3-D model of an anatomical region |
| WO2008064367A2 (en) | 2006-11-24 | 2008-05-29 | Kabushiki Kaisha Toshiba | Method and system for tomographic reconstruction in medical imaging using the circle and line trajectory |
| DE102007022714A1 (de) * | 2007-05-15 | 2008-12-04 | Siemens Ag | Verfahren zur Streustrahlungskorrektur bei einem Röntgen-Computertomografie-System und Verfahren zur Erzeugung einer streustrahlungskorrigierten tomografischen Darstellung, sowie Röntgen-Computertomografie-System |
| DE102007025678A1 (de) * | 2007-06-01 | 2008-12-04 | Rwth Aachen | Verfahren zur Bildverarbeitung und Bildverarbeitungseinrichtung |
| US8822409B2 (en) * | 2007-06-20 | 2014-09-02 | Phylogica Limited | Compositions and uses thereof for the treatment of acute respiratory distress syndrome (ARDS) and clinical disorders associated with therewith |
| US7848479B1 (en) * | 2007-06-29 | 2010-12-07 | University Of Central Florida Research Foundation, Inc. | Image reconstruction for a general circle-plus trajectory |
| JP5269358B2 (ja) * | 2007-07-18 | 2013-08-21 | 株式会社東芝 | X線ct装置 |
| JP5525706B2 (ja) * | 2007-07-25 | 2014-06-18 | 株式会社東芝 | X線コンピュータ断層撮影装置 |
| US7929742B2 (en) * | 2007-09-28 | 2011-04-19 | Siemens Medical Solutions Usa, Inc. | Method and system for computed tomographic imaging |
| JP5142664B2 (ja) * | 2007-10-25 | 2013-02-13 | 株式会社東芝 | X線コンピュータ断層撮影装置 |
| JP2009142300A (ja) * | 2007-12-11 | 2009-07-02 | Toshiba Corp | X線ct装置、及びスキャン計画作成方法 |
| KR100923094B1 (ko) * | 2008-01-15 | 2009-10-22 | (주)이우테크놀로지 | 트렁케이션 아티팩트를 보정하는 방법 |
| EP2277145A1 (en) * | 2008-05-06 | 2011-01-26 | Koninklijke Philips Electronics N.V. | Image artifact reduction |
| JP5461803B2 (ja) * | 2008-08-22 | 2014-04-02 | 株式会社東芝 | X線ct装置 |
| JP5340748B2 (ja) * | 2009-01-05 | 2013-11-13 | ジーイー・メディカル・システムズ・グローバル・テクノロジー・カンパニー・エルエルシー | X線ct装置 |
| US9208937B2 (en) | 2009-02-27 | 2015-12-08 | Cyntec Co., Ltd. | Choke having a core with a pillar having a non-circular and non-rectangular cross section |
| USRE48472E1 (en) | 2009-02-27 | 2021-03-16 | Cyntec Co., Ltd. | Choke having a core with a pillar having a non-circular and non-rectangular cross section |
| US9117580B2 (en) | 2009-02-27 | 2015-08-25 | Cyntec Co., Ltd. | Choke |
| US8212641B2 (en) * | 2009-02-27 | 2012-07-03 | Cyntec Co., Ltd. | Choke |
| US8559687B2 (en) * | 2009-10-30 | 2013-10-15 | Kabushiki Kaisha Toshiba | Method for circular scan reconstruction in computed tomography and computed tomographic device |
| WO2011084878A1 (en) | 2010-01-05 | 2011-07-14 | William Beaumont Hospital | Intensity modulated arc therapy with continuous couch rotation/shift and simultaneous cone beam imaging |
| JP5417644B2 (ja) * | 2010-02-10 | 2014-02-19 | 株式会社東芝 | 粒子線ビーム照射装置及びその制御方法 |
| JP5899208B2 (ja) * | 2010-05-27 | 2016-04-06 | コーニンクレッカ フィリップス エヌ ヴェKoninklijke Philips N.V. | 偏心フラットパネル検出器による、コーンビーム・コンピュータ断層撮影画像形成のための改善された再構成 |
| BR112013000907A2 (pt) * | 2010-07-16 | 2017-10-31 | Univ Denmark Tech Dtu | composição, partícula nanodimensionada para uso em registro de imagem de raios-x e método para tratamento de uma condição ou doença associada ao crescimento indesejável de células em um indivíduo com necessidade dele |
| US8437522B2 (en) * | 2011-02-17 | 2013-05-07 | Kabushiki Kaisha Toshiba | Motion index for medical imaging data based upon Grangeat's formula |
| US8805037B2 (en) | 2011-05-31 | 2014-08-12 | General Electric Company | Method and system for reconstruction of tomographic images |
| CN103239253B (zh) * | 2012-02-14 | 2015-07-15 | 株式会社东芝 | 医用图像诊断装置 |
| US9069092B2 (en) | 2012-02-22 | 2015-06-30 | L-3 Communication Security and Detection Systems Corp. | X-ray imager with sparse detector array |
| CN102973291B (zh) * | 2012-12-20 | 2015-03-11 | 电子科技大学 | C型臂半精确滤波反投影断层成像方法 |
| US9091628B2 (en) | 2012-12-21 | 2015-07-28 | L-3 Communications Security And Detection Systems, Inc. | 3D mapping with two orthogonal imaging views |
| KR101534098B1 (ko) * | 2013-09-13 | 2015-07-07 | 삼성전자주식회사 | Ct 장치 및 이를 이용한 엑스선 제어 방법 |
| US9949709B2 (en) | 2014-06-23 | 2018-04-24 | University Of Maryland, Baltimore | Techniques for suppression of motion artifacts in medical imaging |
| CN106534861B (zh) * | 2016-11-25 | 2019-10-01 | 中北大学 | 图像压缩及解压方法及装置 |
| JP7273272B2 (ja) * | 2018-05-28 | 2023-05-15 | 国立研究開発法人理化学研究所 | 角度オフセットによる断層画像データの取得方法、取得装置、および制御プログラム |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5784481A (en) | 1996-06-25 | 1998-07-21 | General Electric Company | CT cone beam image reconstruction with circle and line scan path |
| US5706325A (en) | 1996-12-05 | 1998-01-06 | General Electric Company | Exact regional reconstruction of longitudinally-unbounded objects using a circle-and-line cone beam tomographic system |
| US5970111A (en) * | 1997-09-30 | 1999-10-19 | Siemens Corporate Research, Inc. | Fast and efficient multiprocessor implementation for exact for an exact cone beam image reconstruction |
| US6014419A (en) | 1997-11-07 | 2000-01-11 | Hu; Hui | CT cone beam scanner with fast and complete data acquistion and accurate and efficient regional reconstruction |
| US5960055A (en) * | 1997-12-19 | 1999-09-28 | Siemens Corporate Research, Inc. | Fast cone beam image reconstruction using a detector weight list |
| US6009142A (en) * | 1998-03-31 | 1999-12-28 | Siemens Corporate Research, Inc. | Practical cone beam image reconstruction using local regions-of-interest |
| DE19842859A1 (de) * | 1998-09-18 | 2000-03-23 | Basf Ag | Additive für Zement enthaltende mineralische Baustoffe |
| US6584186B1 (en) * | 2000-01-12 | 2003-06-24 | Lucent Technologies Inc. | Protecting communications network integrity |
| US6542570B1 (en) | 2000-04-14 | 2003-04-01 | Kabushiki Kaisha Toshiba | Method and system for reconstructing computed tomography images using redundant data |
| US6546067B2 (en) | 2001-01-30 | 2003-04-08 | Kabushiki Kaisha Toshiba | Reconstruction and scan of 4D-CT |
| US6584166B2 (en) | 2001-04-03 | 2003-06-24 | Kabushiki Kaisha Toshiba | X-ray computerized tomographic apparatus |
| US6560308B1 (en) | 2001-10-26 | 2003-05-06 | Kabushiki Kaisha Toshiba | Method and system for approximating missing data in cone beam x-ray CT reconstruction |
| US6574297B2 (en) * | 2001-10-30 | 2003-06-03 | Siemens Corporate Research, Inc. | System and method for image reconstruction in a cone beam imaging system |
-
2002
- 2002-10-16 JP JP2002301432A patent/JP4282302B2/ja not_active Expired - Fee Related
- 2002-10-24 US US10/278,872 patent/US6907100B2/en not_active Expired - Fee Related
- 2002-10-25 CN CN02151818.1A patent/CN1289034C/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US20040086074A1 (en) | 2004-05-06 |
| US6907100B2 (en) | 2005-06-14 |
| JP4282302B2 (ja) | 2009-06-17 |
| JP2003199740A (ja) | 2003-07-15 |
| CN1437914A (zh) | 2003-08-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1289034C (zh) | X射线ct装置、三维图象再次构成方法及权重设定方法 | |
| CN1261077C (zh) | 计算机x射线断层造影设备 | |
| CN1268035A (zh) | 利用螺旋扫描ct再现立体图像 | |
| CN1688254A (zh) | X线断层摄影装置 | |
| CN1309548A (zh) | 用于螺旋扫描立体计算的x断层照相系统的改进的探测器阵列的几何形状 | |
| CN1883391A (zh) | X射线ct设备 | |
| CN1955725A (zh) | X射线ct系统 | |
| CN1307943C (zh) | 逆投影方法和x射线计算机化断层摄影装置 | |
| CN1460452A (zh) | 三维反投影方法和一种x射线计算机层析成像装置 | |
| CN101040781A (zh) | X射线衰减校正方法、ct装置、图像产生装置及方法 | |
| CN101049243A (zh) | X射线ct装置 | |
| CN1931098A (zh) | X-射线ct设备 | |
| CN1535659A (zh) | Ct系统校正系数计算方法、束硬化后处理方法及ct系统 | |
| CN1241151C (zh) | 基于圆加多弧轨迹的锥光束计算机断层摄影系统和方法 | |
| CN1245927C (zh) | 计算机层析x射线摄影方法及计算机层析x射线摄影(ct)仪 | |
| CN1261437A (zh) | 无胶片光子成象装置 | |
| CN1164072C (zh) | 图象扫描装置和方法 | |
| CN100343857C (zh) | 用于分析管状结构例如血管的分析器 | |
| CN1205847C (zh) | 元件识别方法和其装置 | |
| CN1518956A (zh) | 三维反向投影方法和x射线ct装置 | |
| CN1734444A (zh) | 图像处理装置及其控制方法 | |
| CN1505804A (zh) | 图像处理方法和图像处理设备 | |
| Sanishvili et al. | A 7 µm mini-beam improves diffraction data from small or imperfect crystals of macromolecules | |
| CN1225491A (zh) | 纠错方法和系统 | |
| CN1905836A (zh) | 磁共振成像装置、图像数据修正装置和图像数据修正方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| C17 | Cessation of patent right | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20061213 Termination date: 20121025 |