CN114502925A - 天平用风挡 - Google Patents
天平用风挡 Download PDFInfo
- Publication number
- CN114502925A CN114502925A CN201980101179.0A CN201980101179A CN114502925A CN 114502925 A CN114502925 A CN 114502925A CN 201980101179 A CN201980101179 A CN 201980101179A CN 114502925 A CN114502925 A CN 114502925A
- Authority
- CN
- China
- Prior art keywords
- door
- stopper
- air
- pressure
- cylinder
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 230000007246 mechanism Effects 0.000 claims abstract description 41
- 238000012544 monitoring process Methods 0.000 claims abstract description 4
- 238000000034 method Methods 0.000 description 18
- 230000008569 process Effects 0.000 description 18
- 238000005303 weighing Methods 0.000 description 13
- 230000008878 coupling Effects 0.000 description 9
- 238000010168 coupling process Methods 0.000 description 9
- 238000005859 coupling reaction Methods 0.000 description 9
- 239000011521 glass Substances 0.000 description 7
- 238000010586 diagram Methods 0.000 description 6
- 230000008859 change Effects 0.000 description 4
- 238000012937 correction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000003825 pressing Methods 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 239000000725 suspension Substances 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G21/00—Details of weighing apparatus
- G01G21/30—Means for preventing contamination by dust
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01G—WEIGHING
- G01G21/00—Details of weighing apparatus
- G01G21/28—Frames, Housings
- G01G21/286—Frames, Housings with windshields
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Power-Operated Mechanisms For Wings (AREA)
Abstract
提供一种能够以简单的操作使门(11)能够自动地半开闭的天平用风挡(10)。风挡具备作为驱动机构而连结着气缸(40)的门(11)、作为监视上述门(11)的移动的传感器而监视向气缸(40)供给的空气的压力的压力传感器(64A、64B)、以及当压力传感器(64A、64B)监视的空气的压力超过了规定值时进行控制以停止向气缸(40)的空气的供给的控制部(34);在所述风挡中,在门(11)的移动路径上配置止挡(51)以妨碍移动,构成为,通过使门(11)抵接在止挡(51)上,促使气缸(40)内的空气压力的上升而门(11)的移动停止。由于通过抵接在止挡(51)上而门(11)停止,所以通过止挡(51)的配置,全开半开自如地由止挡(51)的位置决定门(11)的开度。
Description
技术领域
本发明涉及具有自动开闭的门的天平用风挡,特别涉及能够自动地使门半开闭的风挡。
背景技术
以往,在称量精度较高的电子天平中使用具有自动开闭的门的风挡。通过用风挡将称量皿覆盖,能够防止作为精度下降的原因之一的称量皿周围的空气的流动,此外通过自动地使门开闭,使称量作业的作业性提高。
这里,为了使空气的流动成为最小限度,有对于使门在半开位置自动开闭的需求。因此,例如在专利文献1中,构成为,以希望的开度使门自动开闭。
现有技术文献
专利文献
专利文献1:日本特开平7-83744号
发明内容
发明要解决的课题
但是,在专利文献1中,需要存储希望的门的开度,花费工夫。
本发明是鉴于上述问题而做出的,目的是提供一种能够以简单的操作使门自动地半开闭的天平用风挡。
用来解决课题的手段
为了解决上述问题,在本发明的风挡的一技术方案中,在具有通过驱动机构自动地开闭的门的风挡中,构成为,具备:传感器,监视上述门的移动;止挡,配置在上述门的移动路径上,妨碍上述门的移动;以及控制部,如果由上述传感器检测到上述门的移动被妨碍,则使上述驱动机构停止。通过这样构成,由配置止挡的位置决定上述门的开度。由于是不仅在半开时、在全开时也以止挡使其停止的结构,所以能够没有特别的追加机构而实施半开。仅通过使止挡配置在门的移动路径上,就实施门的半开,成为操作较容易、切换也较简单的构造。进而,半开闭中的门的开度的设定位置也通过止挡的配置位置能够一目了然地掌握。
此外,在一技术方案中,在上述门上,作为上述驱动机构而连结着气缸;上述传感器是监视向上述气缸供给的空气的压力的压力传感器;上述控制部构成为,在上述压力传感器监视的空气的压力超过了规定值时,停止向上述气缸的空气的供给。由此,由压力传感器监视气缸的空气压力,如果门抵接在某处而气缸内的压力上升,则成为压力传感器检测到该情况而停止的结构。成为根据压力传感器的值对开闭进行控制、通过门抵接在某处而使移动自然地停止的结构。开闭移动是通过门抵接在某处而停止的结构,仅通过将止挡配置在移动路径上而抵接于门上,也能够简单地进行自动半开。此外,即使因手指夹入等门也停止,所以还兼作为安全装置。仅通过将止挡配置/配置解除,就能够容易地进行半开/全开的切换。
此外,在一技术方案中,构成为,上述止挡在上述门的附近被可转动地支承;通过上述止挡的转动角度,上述止挡被有选择地配置在上述门的移动路径上或上述门的移动路径外。仅通过使止挡转动,就能够切换门的半开闭/全开闭的设定。
发明效果
根据上述结构,提供能够以简单的操作使门自动地半开闭的天平用风挡。
附图说明
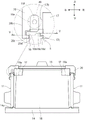
图1是有关第1实施方式的带有风挡的电子天平的部分剖断立体图。
图2是风挡的右侧视图。
图3是沿着图2的III-III线的端面图。
图4是风挡的后视图。
图5是用来说明门的开闭机构的说明图,是用图4的V-V线将一部分剖断的部分截面立体图。
图6是止挡的立体图。
图7是用来说明有关第1实施方式的半开机构的说明图。
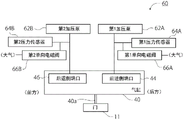
图8是有关第1实施方式的门开闭机构的框图。
图9是有关第1实施方式的门开闭机构的动作表。
图10是有关第1实施方式的门开闭动作的流程图。
图11是有关第2实施方式的带有风挡的电子天平的立体图。
图12是用来说明有关第2实施方式的半开机构的结构的说明图。
具体实施方式
(带有风挡的电子天平的结构)
以下,按照附图说明有关本发明的结构的优选的实施方式。图1是有关实施方式的带有风挡的电子天平1的部分剖断立体图。
如图1所示,带有风挡的电子天平1具备电子天平30和风挡10。天平主体30具备用来在其上方面上载置试料的称量皿31。风挡10以将称量皿31的周围包围的方式配置在天平30的上方面上,防止称量皿31的周围的空气的流动、例如空调的风、称量时的人的气息、人行走时产生的空气的流动等作为风压对以称量皿31为中心的载荷负荷部分作用而给计量带来影响。
风挡10可拆装地装备在电子天平30上,在拆装机构中使用以往周知的结构、例如日本特开2008-216047号公开的结构,但并不限于此,风挡10和电子天平30不可分离地一体化而构成也可以。
风挡10是无底箱型,在前方面具有正面玻璃12,在背部具有箱型的壳体18,在左右的侧壁的一部分上具有门11,在上方面上具有上方门13,作为由它们区划的空间,在内部形成长方体形状的称量室S。
门11沿着设在作为风挡10的下部的框部件的下部框架14上的轨道14a,上方门13沿着设在处于风挡10的上部的左右边的筒座20上的轨道20a,分别能够在前后方向上移动。
在正面玻璃12、上方门13及左右的门11中,使用透明的玻璃或树脂材料以使内部的状态能够观察。在上方门13及门11上,分别安装着对滑动进行辅助的把手。上方门13能够以手动开闭,左右侧面的门11构成为,能够自动及手动地开闭。
控制面板35是用来操作天平主体30及风挡10的,与天平主体30及风挡10分体地设置。这是为了防止按下开关等操作的振动给称量带来影响。由于是分体的,所以能够自由地配置到用户容易操作的位置。为了信号收发而具备无线通信功能,但也可以以有线收发信息。
控制面板35在其上方面上具备显示称量结果及状态的显示部38、操作用的开关37、红外线传感器36。红外线传感器36是门11的开闭开关,仅通过将手盖在上部就能够自动地使门11开闭。也可以代替红外线传感器36而设置按压开关,此外也可以构成为具备按压开关和红外线传感器36这两者。也可以对红外线传感器36分配门11开闭功能以外的天平操作功能。也可以将红外线传感器36左右设置两个,构成为,分别使对应的门11开闭。
设有上部框架17,以构成大致长方体形状的风挡10的左右的上边,在上部框架17上将较长方向匹配而卡合着筒座20。筒座20是中空的壳体,在内部中容纳着作为使门11开闭的驱动机构的气缸40。
气缸40是复动型,内部的活塞的往复运动的去和回这两者由空气压力进行,所以在两处设有向气缸40内输送空气的端口。在气缸40的前方侧,设有用来通过输送来的空气使活塞向后方前进的后退侧端口46,在后方侧,设有用来将活塞向前方送出的前进侧端口44。在这些端口44、46上连接着未图示的空气管,向壳体18内连接。
在壳体18内部,容纳着作为气缸40的驱动源的泵、对空气的流动/停止进行控制的电磁阀、以及对它们进行控制的控制部34等。
(门的构造)
接着,说明门11的开闭机构及其构造。图2是风挡10的右侧视图,图3是沿着图2中的III-III线的端面图,图4是风挡10的后视图。图5是用来说明门11的形状及结构的说明图,仅表示门11、筒座20、上部框架17,是将筒座20及上部框架17沿着图4的V-V线切断的部分截面立体图。
如图3所示,在筒座20的内壁上,匹配于气缸40的形状而形成有凹部,气缸40与这里卡合而被固定。此外,筒座20在上部具备罩20e,将其作为压体而形成有轨道20a。
如图4及图5所示,一对上部框架17沿着在壳体18的上部的左右的边部上设置的凹部18a而配置,构成风挡10的上部的框部件。筒座20在后视下具有将倒L字型顶出的外形,上边部分被载置在上部框架17的上方面上,内侧面与上部框架17的侧面抵接,倒L字的直角部分与上部框架17的角部卡合,将较长方向与上部框架17匹配而被固定。
筒座20不具有底面(参照图3),门11的上部进入到筒座20内部中而配置。在筒座外侧面20b的下端部,朝向内侧遍及较长方向的全长形成有内凸缘部20c。此外,在上部框架17的外侧面17b的下部,与内凸缘部20c对置而形成有遍及较长方向(前后方向)的全长延伸的凸部17c。
将门11用在整体的外缘部上具备的保持器16保持。在保持器16的上部的前后两个部位,形成有与门11的滑动方向(前后方向)正交而在门11的厚度方向(左右方向)上突出的保持部5。门11的上部进入到形成在内凸缘部20c与凸部17c之间的狭缝(以下称作导引孔20d)中,保持器16的保持部5与内凸缘部20c及凸部17c卡合,将门11悬挂保持。由此,门11从下部框架14上方面及形成于其上的轨道14a上方面离开而配置,可沿着导引孔20d滑动地被保持。如果垃圾或砂砾等侵入到轨道14a,则有门11开闭时的滑动阻力变大而开闭变得困难的问题,但通过将门11自身从上部吊挂,防止了该问题。
内凸缘部20c和凸部17c不正对而在上下方向上稍稍偏移而形成,作为内侧的凸部17c处于比内凸缘部20c稍高的位置。这是因为,与保持部5从门11的上部在左右以相同的高度突出、设为门11向左右哪一方都容易晃动的状态相比,稍稍将内侧提高而使门11向内侧倾斜,使门11的下部抵接在轨道14a侧面上,将门11的姿势稳定地保持。通过这样构成,即使移动,门11也不会晃动,在门11的开闭时,也能够在维持着相同的姿势的状态下移动,能够防止意外的门11的滑动。
门11的保持部5与内凸缘部20c及凸部17c的形状和配置匹配而形成,由朝向外侧配置的内凸缘部20c侧突出形成的第1卡合部16b、朝向内侧配置的凸部17c侧突出而形成的第2卡合部16c、还有向第2卡合部16c的下方偏移而形成的第3卡合部16d构成。
第3卡合部16d以与第2卡合部16c一起夹着凸部17c的方式形成,但第3卡合部16d与凸部17c底面保持间隙以离开而形成。
在本实施方式中,将门11的悬挂支承形态如上那样构成,但也可以采用形成为T字的保持部5与形成于平板上的狭缝卡合的形态、或将保持部5做成钩状而使其与凸状轨道卡合的形态等其他的以往周知的结构。
如图5所示,在保持器16的前端上部,形成有结合部16e。结合部16e朝向门11的上方凸设,在中央形成有沿着门11的滑动方向的结合孔16f。从气缸40内的活塞延伸的活塞杆40a的前端与该结合孔16f嵌合而被固定。活塞(活塞杆40a)通过保持器16与门11连接,通过活塞借助空气前后移动,保持器16沿着导引孔20d滑动,门11开闭。
在保持器16与内凸缘部20c卡合的状态下,气缸40也不与保持器16的上方面接触,与保持器16离开而被固定(参照图3),气缸40不妨碍门11的运动。此外,结合部16e比保持器16上方面向上方突出,但由于结合部16e被固定在活塞杆40a的前端,所以不会进入到气缸40下方,此外由于也确保了筒座20内的结合部16e的路径,所以筒座20和结合部16e不会干涉。
作为门11的驱动机构的气缸40在门11的大致正上方与门11的滑动方向平行地配置。将门11悬挂支承的保持器16通过形成在上方面上的结合部16e与气缸40连结,气缸40使将门11悬挂支承的保持器16直接滑动而使门11开闭。因此,来自气缸40的力的传递率较好,能够以稍稍的力使门11开闭,能够使门11顺畅地开闭。
(半开机构)
接着,说明用来使门11半开的半开机构50。图6是作为门11的卡止部件的止挡51的立体图。图7是图1的A部放大图,是仅表示壳体18和止挡51而说明止挡51的转动状态的说明图。图7(A)表示止挡51不使用状态,图7(B)表示止挡51使用状态。
如图6所示,止挡51具有其上部为大致长方体形状、下部为圆柱形状的外形。在上方面上突出形成有把持部51a,在下部的圆柱形状的中心形成有在前后方向上突出的旋转轴51b。此外,在前方面上部,弹性部件52与形成在止挡51的前方面上的孔(未图示)嵌合而被固定。
在壳体18的侧面上,设有匹配于止挡51的大小而在内侧凹陷形成的容纳部18b(参照图2)。止挡51在容纳部18b内以旋转轴51b与门11的滑动方向平行的方式配置,能够以旋转轴51b为轴转动地被保持。此时,弹性部件52被配置成为门11配置侧(前方侧)。
如图7(A)所示,在止挡51不使用时,止挡51以直立状态被保持在该容纳部18b内。因此,不会妨碍门11的移动。
如图7(B)所示,在止挡51使用时,止挡51把持上部的把持部51a而将其从容纳部18b拉出。止挡51从图7(A)的状态转动,在其上部横截轨道14a的状态下其侧面与轨道14a上方面抵接而被保持。
止挡51是以妨碍门11的移动的目的而配置的,根据止挡51的转动角度,将止挡51有选择地配置在门11的移动路径上或门11的移动路径外。
(框图)
对门11的自动开闭机构详细地进行说明。图8是表示带有风挡的电子天平1的门11的开闭机构60的框图。开闭机构60是用来使门11开闭的机构,左右的门11分别具备开闭机构60,被连接的开闭机构60独立地控制。在本实施方式中,分别存在使气缸40的内部的活塞(进而从活塞延伸的活塞杆40a)向前方移动(前进)的泵和用来使其向后方移动(后退)的泵。
开闭机构60具备第1加压泵62A、第2加压泵62B、第1压力传感器64A、第2压力传感器64B、第1单向电磁阀66A、第2单向电磁阀66B及气缸40。气缸40经由活塞杆40a与门11连接。
第1加压泵62A、第2加压泵62B都是空气泵。是气缸40的驱动源,将空气压缩而向气缸40输送,通过空气压力使活塞运动而使门11移动。
第1单向电磁阀66A、第2单向电磁阀66B其阀的出口侧被向大气开放,通过阀的开闭对空气的流动/停止进行控制。
第1压力传感器64A监视从第1加压泵62A喷出的空气的压力,第2压力传感器64B监视从第2加压泵62B喷出的空气的压力。两个压力传感器64A、64B分别与气缸40的两个端口44、46连接,所以换言之,压力传感器监视向气缸40供给的空气的压力、气缸40内的空气的压力。
在设在气缸40的后方的前进侧端口44,连接着第1加压泵62A。途中有分支,还连接着第1压力传感器64A和第1单向电磁阀66A。在设在气缸40的前方的后退侧端口46,连接着第2加压泵62B。途中有分支,在这边连接着第2压力传感器64B和第2单向电磁阀66B。
开闭机构60的各要素其动作受配置在壳体18内部的控制部34控制。
(门开闭时的动作)
接着,说明门11自动开闭时的各构成要素的动作。图9是开闭机构60的动作表。
首先,在使用者能够以手动将门11开闭的“标准状态”下,第1加压泵62A、第2加压泵62B都不动作,第1单向电磁阀66A及第2单向电磁阀66B被打开。由于两加压泵(62A、62B)不动作,两单向电磁阀(66A、66B)打开而与大气连通,所以完全没有来自气缸40的负荷,能够以手动使门11顺畅地开闭。
如果被从控制面板35的红外线传感器36输入“将门打开/关闭”的命令,则控制部34向各要素命令动作。
在将门11打开的“自动打开操作”的情况下,即在使气缸40的活塞向后方移动的情况下,将第2单向电磁阀66B关闭,开始第2加压泵62B的加压。此时,第1加压泵62A不动作,第1单向电磁阀66A被打开,所以通过空气压力而活塞向后方移动,门11被打开。
如果门11完全打开,则空气压力急剧地上升,所以如果第2压力传感器64B检测到该变化,则使第2加压泵62B停止,将第2单向电磁阀66B打开,将气缸内的被压缩的空气向大气开放,回到标准状态。
在将门11关闭的“自动关闭操作”的情况下,即在使气缸40内的活塞向前方移动的情况下,第1单向电磁阀66A被关闭,开始第1加压泵62A的加压。此时,第2加压泵62B不动作,第2单向电磁阀66B被打开,所以通过空气压力,活塞向前方移动,门11被关闭。
如果门11完全关闭,则空气压力还是会急剧地上升,所以如果第1压力传感器64A检测到该变化,则使第1加压泵62A停止,将第1单向电磁阀66A打开,将气缸内的被压缩的空气向大气开放,回到标准状态。
此外,在进行校正的情况下,将第1单向电磁阀66A、第2单向电磁阀66B关闭。两方的单向电磁阀(66A、66B)被关闭,气缸40内的活塞向前后的哪一方都不能移动,门11被锁定。这是为了防止在校正作业中门意外地被打开而给校正带来影响。如果校正结束,则第1单向电磁阀66A和第2单向电磁阀66B被打开,回到标准状态。
这样,在校正作业时自动地将门11锁定。也可以构成为,通过来自开关37的命令将门11锁定。并不限于校正时,在搬运时也能够将门11锁定。
在一方的加压泵可动时,另一方的加压泵不可动,仅一方的电磁阀被关闭,另一方的电磁阀打开而与大气连通。如果可动的泵停止,则原来关闭的电磁阀打开而与大气连通。即,构成为,在加压泵停止时,全部单向电磁阀被打开而与大气连通。在门11自动地被开闭后,空气被向大气开放,不再有作用于门11的负荷,能够以手动使门11顺畅地移动。门11能够自动开闭,并且在被自动开闭后,能够不进行特别的操作而立即进行手动开闭。
(作用效果)
门11在全闭位置与正面玻璃12抵接。详细地讲,与装备在正面玻璃12背面上的未图示的弹性部件抵接。如上述那样,在开闭机构60上没有设置位置传感器等检测全闭/全开位置的传感器,构成为,压力传感器检测空气压力的上升,如果成为规定值以上则使加压泵停止。空气压力的上升因为活塞的移动因某种理由被阻碍、即便这样加压泵也要继续输送空气而引起。
在“自动关闭操作”中,通过门11与正面玻璃12抵接,使门11移动的活塞也不再能够移动,第1加压泵62A要输送空气而空气压力上升,检测到该情况的第1压力传感器64A使第1加压泵62A停止。
在“自动打开操作”中,在气缸40内活塞移动到空气管的端部,与其抵接而不再能够移动,第2加压泵62B要输送空气而空气压力上升,检测到该情况的第2压力传感器64B使第2加压泵62B停止。
这样,在门11的驱动机构中使用气缸40的本实施方式中,门11的移动被压力传感器监视,通过气缸40内的活塞或连接在活塞上的门11抵接在某处而气缸40内的空气压力变高,如果压力传感器检测到空气压力成为规定值以上,则加压泵被停止,所以成为门11的移动停止的结构。即,是通过门11抵接在某处而移动停止的结构,门11的停止位置由抵接在门11上而阻碍移动的物体的配置位置决定。
即使门11是移动途中,如果门11抵接在移动阻害物上,也在抵接位置处停止,进而如果被从红外线传感器36输入信号,则从相反的端口输送空气,所以从该位置向相反方向开始移动。通过在门11的移动路径上的希望的位置处配置阻害物,能够自由地决定门11的停止位置。
半开机构50利用该特性而使门11自动地半开闭。即,在止挡51没有被配置在门11的移动路径上的情况下,门11的移动不被妨碍,门11自动地全开闭,而如果止挡51被配置在门11的移动路径上,则门11在从全闭状态向全开状态移动的途中抵接在与止挡51嵌合的弹性部件52上而停止,进而如果被从红外线传感器36输入信号,则门11从该位置向前方移动,抵接在正面玻璃12,在全闭位置处停止。由于止挡51被配置在门11的移动路径的大致中央,所以通过使用止挡51(使其转动),能够使门11自动地半开闭。
通过在门11的移动路径上配置/撤除止挡51,能够简单地切换门11的全开闭/半开闭。止挡51的位置的变更仅将把持部51a把持并拉出或推入即可,配置的变更也非常简单,设定状态也能够一目了然地掌握。
(流程图)
接着,使用图10的流程图说明门11开闭动作的流程。
在步骤S101中,从作为门11开闭的开关的控制面板35的红外线传感器36输入门11开闭的命令信号。在没有被输入信号的情况下,待机直到被输入。
如果被输入命令,则转移到步骤S102,确认门位置是闭位置还是开位置。在本实施方式中,控制部34存储紧接着之前的门11的开闭动作,通过其内容进行判断。
这里,门11由于是也能够自动地半开、进而通过手动也能够开闭的结构,所以门11即使稍稍打开也是开状态,门11是开位置意味着门11不是闭位置。相对于此,是闭位置意味着门11处于全闭状态。因此,也可以构成为,在门11全闭位置作为位置传感器而设置光电遮断器,判断门11是否是闭位置。
首先,对门11处于闭位置的情况(步骤S103~步骤S108)进行说明。
转移到步骤S103,将处于闭位置的门11打开,所以实施门11的“自动开操作”。具体而言,将第2单向电磁阀66B关闭,开始第2加压泵62B的动作。此时,第1单向电磁阀66A是打开的原状,第1加压泵62A不动作(参照图8、图9)。
接着,移动到步骤S104,确认门11是否开始了移动。如果门11开始移动,则空气压力急剧地降低,所以通过第2压力传感器64B的值在规定时间内例如1秒以内急剧地降低,判断为门11开始了开动作。在规定时间内没有进行门11的移动开始的情况下,控制部34判断为“门11已经打开”,转移到步骤S109,这次开始“自动闭操作”(后述)。或者,也可以构成为,通过第2压力传感器64B的值超过了规定的值,判断为门没有开始移动。虽然门11的紧接着之前的位置被存储,但在本实施方式中也能够进行通过手动的开闭,有通过使用者而门11的位置移动的情况。由该步骤S104对这样的情况或门11位置的误判断进行保障。
如果开始门11的移动,则转移到步骤S105,确认门11的开动作是否已结束。如果门11的移动完成,则空气压力再次上升,所以通过第2压力传感器64B的值在规定时间内再次上升,判断为门11的开动作结束了。在规定时间内第2压力传感器64B的值没有上升的情况下,由于怀疑为空气泄漏或故障,所以为了进行错误处理而转移到步骤S106。
在步骤S106中,作为错误处理,发出警告音,在显示部38上显示错误,将第2加压泵62B的动作停止,将第2单向电磁阀66B打开,紧急停止。
在通过空气压力上升而确认了门11的开动作的完成的情况下,转移到步骤S107,停止第2加压泵62B的动作,将第2单向电磁阀66B打开,自动操作正常地结束。
最后转移到步骤S108,成为标准状态,能够进行手动下的开闭。
接着,对在步骤S102中门11处于开位置的情况(S109~S113)进行说明。
转移到步骤S109,为了将处于开位置的门11关闭,实施门11的“自动闭操作”。具体而言,将第1单向电磁阀66A关闭,开始第1加压泵62A的动作。此时,第2单向电磁阀66B是打开的原状,第2加压泵62B不动作(参照图8、图9)。
接着转移到步骤S110,确认门11是否开始了移动。与步骤S104同样,通过第1压力传感器64A的值在规定时间内急剧地降低,判断为门11开始了闭动作。在规定时间内没有开始门11的移动的情况下,控制部34判断为“门11已经关闭”,转移到步骤S103,此次开始“自动开操作”。该步骤S110也与步骤S104同样,是由手动开闭而使门11移动位置等的情况或误判断的保障。
如果开始了门11的移动,则转移到步骤S111,确认门11的闭动作是否结束了。门11的移动的完成通过第1压力传感器64A在规定时间内第1压力传感器64A的值再次上升来判断。在规定时间内第1压力传感器64A的值没有上升的情况下,还是进行错误处理,所以转移到步骤S112。在规定时间内通过第1压力传感器64A的值的上升确认了门闭动作的完成的情况下,转移到步骤S113。
在步骤S112中,作为错误处理而发出警告音,在显示部38上显示错误,将第1加压泵62A的动作停止,将第1单向电磁阀66A打开,紧急停止。
在规定时间内确认了第1压力传感器64A的值的上升的情况下,转移到步骤S113,将第1加压泵62A的动作停止,将第1单向电磁阀66A打开。
最后移动到步骤S108,成为标准状态,能够进行手动下的开闭。
如步骤S105及步骤S111所示,本实施方式的门11的开闭的结束通过空气压力的上升来判断。因此,在因某种理由而空气压力上升了的情况下,全部转移到S107或步骤S113,自动操作结束。
由于空气压力的上升通过门11的移动被妨碍而被引起,所以除了借助止挡51等移动障碍物的有意的设置进行的开度的决定以外,还兼具备防止手指夹入等安全功能的意义。在门11要被自动地关闭时或要被打开时,在作业者将手指夹在门11中的情况下、或者在将试料等夹在门11中的情况下、或在门11移动时有不良状况而将移动强行中止的情况下,空气压力也上升,所以第1压力传感器64A(或第2压力传感器64B)检测到该情况,门11的动作立即停止,将两单向电磁阀(66A、66B)连通到大气,门11的负荷消失而确保安全。
通过空气压力上升而使门11停止,在门11的通常的自动开闭中也进行,所以由止挡51进行的停止不是紧急机构,而是作为通常机构使门11的移动停止。进而,作为安全功能的停止也是作为通常机构使其停止的,为不追加特别的构成要素而拥有作为安全功能和半开功能的效力的结构。进而,由于是在停止后从相反的端口输送空气的结构,所以也不需要切换操作或解除操作等。能够以简单的结构使其拥有安全功能、希望的位置处的自动半开功能。
(第2实施方式)
图11是有关第2实施方式的带有风挡的电子天平1A的部分剖断立体图。对于具有同等的结构者赋予相同的标号而省略说明。
带有风挡的电子天平1A除了代替自动地使其半开闭的半开机构50而具备在希望的位置使门11开闭的半开机构50A以外,为与第1实施方式同等的结构。
图12是用来说明半开机构50A的结构的说明图。表示壳体18和下部框架14以及半开机构50A,(A)表示止挡53的不使用状态,(B)表示止挡53的使用状态。
半开机构50A由形成在下部框架14上的凸状轨道54和止挡53构成。
凸状轨道54在下部框架14的上方面上,在门11移动路径附近且不妨碍门11的移动的位置,与轨道14a平行即与门11的滑动方向平行而以线状突设。
止挡53是将两条臂55、56以弹性部件(弹簧)57为基点将两下端部开闭自如地组合的夹子构造体。由于由弹性部件57将下端部向关闭方向施力,所以能够用手指捏住臂的两上端部,将臂打开,用下端部夹持物体。
在使用止挡53时,在线状的凸状轨道的希望的位置,使止挡53夹持凸状轨道54。在一方的臂55的下端部,朝向外侧形成有卡止部55a,如果用止挡53夹持凸状轨道54,则卡止部55a进入到由轨道14a和凸状轨道54形成的槽中,被配置在与移动的门11的侧面抵接的位置。
如上述那样,门11的移动抵接在配置于移动路径上的止挡53(卡止部55a)上而停止。进而,如果为了关闭而被输入信号,则从那里折返而移动。门11在止挡53的配置位置处自动地半开闭,由配置有止挡53的场所决定门11的开度。
止挡53只是夹持凸状轨道54,使用者能够用手指将止挡53捏住而简单地安装/拆卸。只要在不使用的情况下预先拆下、或者配置到凸状轨道54端部上即可。为了防止遗失,也可以在壳体18上设置容纳场所。
仅通过将止挡53配置(使其夹持)在凸状轨道54的较长方向的希望的位置,就能够决定门11的关闭位置,能够一目了然地掌握门11的停止位置。
以上,叙述了本发明的实施方式及变形例,但也可以将实施方式及变形例基于本领域技术人员的知识进行组合,这样的形态包含在本发明的范围中。
标号说明
1、1A 带有风挡的天平
10 风挡
11 门
34 控制部
40 气缸
51、53 止挡
62A、62B 加压泵
64A、64B 压力传感器
Claims (3)
1.一种天平用风挡,具有通过驱动机构自动地开闭的门,其特征在于,
具备:
传感器,监视上述门的移动;
止挡,配置在上述门的移动路径上,妨碍上述门的移动;以及
控制部,如果由上述传感器检测到上述门的移动被妨碍,则使上述驱动机构停止。
2.如权利要求1所述的天平用风挡,其特征在于,
在上述门上,作为上述驱动机构而连结着气缸,
上述传感器是监视向上述气缸供给的空气的压力的压力传感器,
上述控制部构成为,在上述压力传感器监视的空气的压力超过了规定值时,停止向上述气缸供给空气。
3.如权利要求1所述的天平用风挡,其特征在于,
上述止挡在上述门的附近被可转动地支承,
通过上述止挡的转动角度,上述止挡被有选择地配置在上述门的移动路径上或上述门的移动路径外。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2019/043469 WO2021090396A1 (ja) | 2019-11-06 | 2019-11-06 | 天びん用風防 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114502925A true CN114502925A (zh) | 2022-05-13 |
Family
ID=75848840
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980101179.0A Pending CN114502925A (zh) | 2019-11-06 | 2019-11-06 | 天平用风挡 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20220364907A1 (zh) |
| JP (1) | JP7288571B2 (zh) |
| CN (1) | CN114502925A (zh) |
| WO (1) | WO2021090396A1 (zh) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114556057A (zh) * | 2019-11-06 | 2022-05-27 | 株式会社爱安德 | 天平用风挡 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0516053A (ja) * | 1991-07-12 | 1993-01-26 | Fanuc Ltd | 工作機械のスプラツシユガードドアの障害物検出装置 |
| JP2003262549A (ja) * | 2002-03-07 | 2003-09-19 | Toyama Sangyo Kk | 電子秤の扉自動開放装置 |
| CN102152164A (zh) * | 2010-02-05 | 2011-08-17 | 新明和工业株式会社 | 隔离体的开关装置 |
| US20150204716A1 (en) * | 2012-09-10 | 2015-07-23 | Radwag Wagi Elektroniczne Witold Lewandowski | Automatic door opening mechanism of an analytical balance's weighing chamber |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE3919870C1 (zh) * | 1989-06-19 | 1990-06-21 | Sartorius Gmbh, 3400 Goettingen, De | |
| JPH0723239A (ja) * | 1993-06-18 | 1995-01-24 | Ricoh Co Ltd | デジタル複写機 |
| JP2581942Y2 (ja) * | 1993-09-28 | 1998-09-24 | 株式会社島津製作所 | 風防付き天びん |
| JP3491399B2 (ja) * | 1995-06-30 | 2004-01-26 | 株式会社島津製作所 | 風防付き天秤 |
| ATE506603T1 (de) * | 2004-07-16 | 2011-05-15 | Mettler Toledo Ag | Windschutzvorrichtung für eine waage |
| EP1857788B1 (en) * | 2005-02-04 | 2015-09-16 | Shimadzu Corporation | Electronic balance with windshield |
| DE102011001354B4 (de) * | 2011-03-17 | 2014-06-26 | Sartorius Lab Instruments Gmbh & Co. Kg | Windschutz für eine Präzisionswaage |
| DE102013113006B4 (de) * | 2013-11-25 | 2018-05-09 | Sartorius Lab Instruments Gmbh & Co. Kg | Windschutz für eine Präzisionswaage und Hängeführung für eine Seitenscheibe eines Windschutzes |
| JP6691436B2 (ja) * | 2016-06-10 | 2020-04-28 | 新光電子株式会社 | 秤の風防装置 |
| CN111587361B (zh) * | 2018-12-19 | 2023-08-04 | 株式会社爱安德 | 电子天平 |
| CN111587362B (zh) * | 2018-12-19 | 2023-09-19 | 株式会社爱安德 | 电子天平 |
| EP3865834B1 (en) * | 2020-02-11 | 2024-04-03 | Mettler-Toledo GmbH | Wind shield structure for a load receiving arrangement in a weighing balance |
| US20230113500A1 (en) * | 2020-03-17 | 2023-04-13 | A&D Company, Limited | Windshield for balance |
-
2019
- 2019-11-06 US US17/765,788 patent/US20220364907A1/en active Pending
- 2019-11-06 JP JP2021554462A patent/JP7288571B2/ja active Active
- 2019-11-06 WO PCT/JP2019/043469 patent/WO2021090396A1/ja active Application Filing
- 2019-11-06 CN CN201980101179.0A patent/CN114502925A/zh active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0516053A (ja) * | 1991-07-12 | 1993-01-26 | Fanuc Ltd | 工作機械のスプラツシユガードドアの障害物検出装置 |
| JP2003262549A (ja) * | 2002-03-07 | 2003-09-19 | Toyama Sangyo Kk | 電子秤の扉自動開放装置 |
| CN102152164A (zh) * | 2010-02-05 | 2011-08-17 | 新明和工业株式会社 | 隔离体的开关装置 |
| US20150204716A1 (en) * | 2012-09-10 | 2015-07-23 | Radwag Wagi Elektroniczne Witold Lewandowski | Automatic door opening mechanism of an analytical balance's weighing chamber |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114556057A (zh) * | 2019-11-06 | 2022-05-27 | 株式会社爱安德 | 天平用风挡 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2021090396A1 (zh) | 2021-05-14 |
| JP7288571B2 (ja) | 2023-06-08 |
| WO2021090396A1 (ja) | 2021-05-14 |
| US20220364907A1 (en) | 2022-11-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11460339B2 (en) | Electronic balance with powered sliding windshield door | |
| US11175176B2 (en) | Electronic balance having mechanically independent windshield | |
| JP7288574B2 (ja) | 天びん用風防 | |
| CN114502925A (zh) | 天平用风挡 | |
| US11473966B2 (en) | Electronic balance | |
| JP7288572B2 (ja) | 天びん用風防 | |
| EP4123268A1 (en) | Windshield for scale | |
| WO2022118447A1 (ja) | 電子天びん用の風防 | |
| WO2022059101A1 (ja) | 電子天びん用の風防 | |
| RU2800792C1 (ru) | Ветрозащитный экран для весов | |
| KR100501154B1 (ko) | 디스플레이부가 설치된 냉장고 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |