CN113772168A - Full-automatic balance equipment for packing of camera module plastic support - Google Patents
Full-automatic balance equipment for packing of camera module plastic support Download PDFInfo
- Publication number
- CN113772168A CN113772168A CN202111052130.6A CN202111052130A CN113772168A CN 113772168 A CN113772168 A CN 113772168A CN 202111052130 A CN202111052130 A CN 202111052130A CN 113772168 A CN113772168 A CN 113772168A
- Authority
- CN
- China
- Prior art keywords
- tray
- axis
- lifting platform
- camera module
- lifting
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000012856 packing Methods 0.000 title description 3
- 239000000463 material Substances 0.000 claims abstract description 54
- 238000004806 packaging method and process Methods 0.000 claims abstract description 16
- 238000001179 sorption measurement Methods 0.000 claims abstract description 13
- 238000004519 manufacturing process Methods 0.000 abstract description 4
- 230000009286 beneficial effect Effects 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B35/00—Supplying, feeding, arranging or orientating articles to be packaged
- B65B35/30—Arranging and feeding articles in groups
- B65B35/36—Arranging and feeding articles in groups by grippers
- B65B35/38—Arranging and feeding articles in groups by grippers by suction-operated grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B43/00—Forming, feeding, opening or setting-up containers or receptacles in association with packaging
- B65B43/12—Feeding flexible bags or carton blanks in flat or collapsed state; Feeding flat bags connected to form a series or chain
- B65B43/14—Feeding individual bags or carton blanks from piles or magazines
- B65B43/16—Feeding individual bags or carton blanks from piles or magazines by grippers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B43/00—Forming, feeding, opening or setting-up containers or receptacles in association with packaging
- B65B43/42—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation
- B65B43/46—Feeding or positioning bags, boxes, or cartons in the distended, opened, or set-up state; Feeding preformed rigid containers, e.g. tins, capsules, glass tubes, glasses, to the packaging position; Locating containers or receptacles at the filling position; Supporting containers or receptacles during the filling operation using grippers
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Specific Conveyance Elements (AREA)
Abstract
The invention discloses full-automatic balance packaging equipment for a camera module plastic support, which comprises a feeding mechanism, a first lifting platform, a second lifting platform, a linear driving mechanism, a tray grabbing mechanism and a material adsorption mechanism, wherein the linear driving mechanism comprises two X-axis gantry frames, X-axis servo driving modules are arranged at the tops of cross beams of the two X-axis gantry frames, a Y-axis sliding table is connected between the two X-axis servo driving modules, a Y-axis servo driving module is arranged on the left side of the Y-axis sliding table, and a Y-axis sliding plate is connected to the Y-axis servo driving module; the feeding mechanism comprises a plurality of linear conveyors arranged side by side, and material transfer tables are arranged at the conveying tail ends of the linear conveyors; the automatic tray placing and packaging device can automatically carry the tray, can place a plurality of camera module plastic supports on the tray, has higher working efficiency compared with the original tray placing and packaging equipment, and can also reduce the production cost of enterprises.
Description
Technical Field
The invention relates to the technical field of balance equipment, in particular to full-automatic balance packaging equipment for a plastic support of a camera module.
Background
With the development of science and technology, smart phones are more and more popular, and one of all functions of smart phones, which is developed most quickly, includes a photographing and shooting function of the smart phone; at present, the hardware of the photographing and shooting function mainly adopts a camera module which is arranged in a modularized way, the camera module is continuously updated along with the requirements of customers and the iteration of the technology, and the algorithm is continuously updated in the later period; the rear camera of the existing smart phone comprises single-shot, double-shot, three-shot, four-shot, five-shot and the like, and the camera is a necessary component of the smart phone.
And camera module plastic support is the most important ring of camera module, and it need carry out the balance packing to it after production, and balance equipment among the prior art then needs operating personnel to carry the tray by oneself, and can only go on one when balancing camera module plastic support, and such work efficiency is comparatively low, and manufacturing cost is higher.
In order to solve the problems, the invention discloses full-automatic balance packaging equipment for a plastic support of a camera module.
Disclosure of Invention
The purpose of the invention is as follows: in order to overcome the defects in the prior art, the invention discloses full-automatic balance packaging equipment for a plastic support of a camera module.
The technical scheme is as follows: a full-automatic balance packaging device for a camera module plastic support comprises a feeding mechanism, a first lifting platform, a second lifting platform, a linear driving mechanism, a tray grabbing mechanism and a material adsorption mechanism,
the linear driving mechanism comprises two X-axis gantry frames, X-axis servo driving modules are arranged at the tops of the cross beams of the two X-axis gantry frames, a Y-axis sliding table is connected between the two X-axis servo drives, a Y-axis servo driving module is arranged on the left side of the Y-axis sliding table, and a Y-axis sliding plate is connected to the Y-axis servo driving module;
the feeding mechanism, the first lifting platform and the second lifting platform are sequentially arranged between the two X-axis gantry frames;
the feeding mechanism comprises a plurality of linear conveyors arranged side by side, and material transfer tables are arranged at the conveying tail ends of the linear conveyors;
the first lifting platform is arranged on the right side of the material transfer platform and used for placing a tray filled with materials and a tray used for material tray placing, and the second lifting platform is arranged on the right side of the material transfer platform and used for placing an empty tray;
the tray grabbing mechanism and the material adsorption mechanism are arranged on the Y-axis sliding plate in a matched mode; the tray grabbing mechanism is used for grabbing empty trays on the second lifting platform onto the first lifting platform, and the material adsorption mechanism is used for conveying materials temporarily placed on the material transfer platform into the trays on the first lifting platform to swing.
The invention realizes the following beneficial effects:
the automatic tray placing and packaging device can automatically carry the tray, can place a plurality of camera module plastic supports on the tray, has higher working efficiency compared with the original tray placing and packaging equipment, and can also reduce the production cost of enterprises.
Drawings
The accompanying drawings, which are incorporated in and constitute a part of this specification, illustrate embodiments consistent with the present disclosure and together with the description, serve to explain the principles of the disclosure.
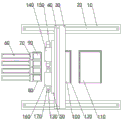
Fig. 1 is a schematic view of the overall structure disclosed in the present invention.
Fig. 2 is a schematic structural view of a tray grabbing mechanism disclosed by the invention.
Fig. 3 is a schematic structural diagram of a material adsorption mechanism disclosed by the invention.
Detailed Description
The technical solutions in the embodiments of the present invention will be clearly and completely described below with reference to the drawings in the embodiments of the present invention, and it is obvious that the described embodiments are only a part of the embodiments of the present invention, and not all of the embodiments.
Examples
Referring to fig. 1-3, a full-automatic balance packaging device for a plastic bracket of a camera module comprises a feeding mechanism, a first lifting platform, a second lifting platform, a linear driving mechanism, a tray grabbing mechanism and a material adsorption mechanism,
the linear driving mechanism comprises two X-axis gantry frames 10, X-axis servo driving modules 20 are arranged at the tops of cross beams of the two X-axis gantry frames, a Y-axis sliding table 30 is connected between the two X-axis servo driving modules, a Y-axis servo driving module 40 is arranged on the left side of the Y-axis sliding table, and a Y-axis sliding plate 50 is connected to the Y-axis servo driving module;
the feeding mechanism, the first lifting platform 100 and the second lifting platform 110 are sequentially arranged between the two X-axis gantry frames;
the feeding mechanism comprises a plurality of linear conveyors 60 arranged side by side, and the conveying tail ends of the linear conveyors are provided with material transfer tables 80;
the first lifting platform is arranged on the right side of the material transfer platform and used for placing a tray filled with materials and a tray used for material disc placing, and the second lifting platform is arranged on the right side of the material transfer platform and used for placing an empty tray;
the tray grabbing mechanism and the material adsorption mechanism are arranged on the Y-axis sliding plate in a matched mode; the tray grabbing mechanism is used for grabbing empty trays on the second lifting platform onto the first lifting platform, and the material adsorption mechanism is used for conveying materials temporarily placed on the material transfer platform into the trays on the first lifting platform to swing the trays.
When concrete operation, the tray snatchs the mechanism and carries the empty tray on the lift platform two to lift platform one earlier, and then, a plurality of linear transport machine carry the material that has processed to the material transfer platform on, and finally, material adsorption mechanism adsorbs the material on with the material transfer platform and transfers to lift platform one and go up and carry out the balance.
In this embodiment, all be provided with spacing frame 120 on the mesa of lift platform two and second lift platform two, and the front portion of spacing frame is for opening the setting, makes things convenient for operating personnel to carry out the tray transport like this.
In this embodiment, the guide sloping plate 70 is installed at the conveying end of each linear conveyor, so that the materials on the linear conveyors can fall onto the material transfer table more accurately and rapidly.
In this embodiment, a plurality of material temporary holding grooves 90 are equidistantly formed on the upper surface of the material transferring table, and here, the shape of each material temporary holding groove matches with the shape of the plastic support of the camera module.
In this embodiment, the tray grabbing mechanism comprises a first lifting driving cylinder 140, an inverted U-shaped supporting frame 150 and two cylinder clamping jaws 180, the first lifting driving cylinder is installed on a Y-axis sliding plate, the inverted U-shaped supporting frame is fixedly connected with a telescopic shaft of the first lifting driving cylinder, the two cylinder clamping jaws are respectively installed at the bottoms of two sides of the inverted U-shaped supporting frame, the Y-axis sliding plate is driven by two X-axis servo driving modules and a Y-axis servo driving module to move to the upper side of a second lifting platform, at the moment, the first lifting driving cylinder drives the two cylinder clamping jaws to descend, and the second lifting platform lifts up stacked empty trays, at the moment, the two pneumatic clamping jaws can operate to grab an empty tray, and under the driving of the two X-axis servo driving modules and the Y-axis servo driving module, the Y-axis sliding plate slides to the upper side of the first lifting platform, and simultaneously lifts up a table top of the first lifting platform, the two pneumatic clamping jaws stop clamping the empty tray, the empty tray will be transferred to the top of lift platform one, if there is the tray of putting the material on the mesa of lift platform one, then empty tray will pile up neatly in the tray top of filling with the material.
In this embodiment, the material adsorbing mechanism includes a second lifting driving cylinder 160, a mounting block 170 and a plurality of pneumatic suction nozzles 130, the second lifting driving cylinder is mounted on the Y-axis slide plate, the mounting block is fixedly connected with the telescopic shaft of the second lifting driving cylinder, the plurality of pneumatic suction nozzles are equidistantly arranged on the mounting block, under the drive of the two X-axis servo driving modules and the Y-axis servo driving module, the Y-axis sliding plate slides to the upper part of the material transfer platform, at the moment, the second lifting driving cylinder drives the mounting block to descend, after the mounting block is in place, the pneumatic suction nozzles can simultaneously adsorb materials in the temporary material placing grooves, and finally, the Y-axis sliding plate slides onto the first lifting platform under the driving of the two X-axis servo driving modules and the Y-axis servo driving module, and the second lifting driving cylinder drives the mounting block to descend, and after the mounting block is in place, the plurality of pneumatic suction nozzles stop adsorbing the materials, and the materials are placed in the placing device.
The above embodiments are merely illustrative of the technical ideas and features of the present invention, and are intended to enable those skilled in the art to understand the contents of the present invention and implement the present invention, and not to limit the scope of the present invention. All equivalent changes or modifications made according to the spirit of the present invention should be covered within the protection scope of the present invention.
Claims (6)
1. A full-automatic balance packaging device for a camera module plastic support is characterized by comprising a feeding mechanism, a first lifting platform, a second lifting platform, a linear driving mechanism, a tray grabbing mechanism and a material adsorption mechanism,
the linear driving mechanism comprises two X-axis gantry frames, X-axis servo driving modules are arranged at the tops of the cross beams of the two X-axis gantry frames, a Y-axis sliding table is connected between the two X-axis servo driving modules, a Y-axis servo driving module is arranged on the left side of the Y-axis sliding table, and a Y-axis sliding plate is connected to the Y-axis servo driving module;
the feeding mechanism, the first lifting platform and the second lifting platform are sequentially arranged between the two X-axis gantry frames;
the feeding mechanism comprises a plurality of linear conveyors arranged side by side, and material transfer tables are arranged at the conveying tail ends of the linear conveyors;
the first lifting platform is arranged on the right side of the material transfer platform and used for placing a tray filled with materials and a tray used for material tray placing, and the second lifting platform is arranged on the right side of the material transfer platform and used for placing an empty tray;
the tray grabbing mechanism and the material adsorption mechanism are arranged on the Y-axis sliding plate in a matched mode; the tray grabbing mechanism is used for grabbing empty trays on the second lifting platform onto the first lifting platform, and the material adsorption mechanism is used for conveying materials temporarily placed on the material transfer platform into the trays on the first lifting platform to swing.
2. The full-automatic balance packaging equipment for the camera module plastic supports as claimed in claim 1, wherein the second lifting platform and the second lifting platform are both provided with a limiting frame on the table top, and the front part of the limiting frame is open.
3. The full-automatic swinging plate packaging equipment for the camera module plastic supports as claimed in claim 1, wherein a guide inclined plate is mounted at the conveying end of each linear conveyor.
4. The full-automatic balance packaging equipment with the camera module and the plastic support as claimed in claim 1, wherein a plurality of material temporary placing grooves are formed in the upper surface of the material transfer table at equal intervals.
5. The full-automatic swinging tray packaging equipment for the camera module plastic supports as claimed in claim 1, wherein the tray grabbing mechanism comprises a first lifting driving cylinder, an inverted U-shaped support frame and two cylinder clamping jaws, the first lifting driving cylinder is mounted on a Y-axis sliding plate, the inverted U-shaped support frame is fixedly connected with a telescopic shaft of the first lifting driving cylinder, and the two cylinder clamping jaws are respectively mounted at the bottoms of two sides of the inverted U-shaped support frame.
6. The full-automatic balance packaging equipment for the plastic supports of the camera modules according to claim 1, wherein the material adsorption mechanism comprises a second lifting driving cylinder, a mounting block and a plurality of pneumatic suction nozzles, the second lifting driving cylinder is mounted on a Y-axis sliding plate, the second mounting block is fixedly connected with a telescopic shaft of the second lifting driving cylinder, and the plurality of pneumatic suction nozzles are equidistantly arranged on the mounting block.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111052130.6A CN113772168A (en) | 2021-09-08 | 2021-09-08 | Full-automatic balance equipment for packing of camera module plastic support |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202111052130.6A CN113772168A (en) | 2021-09-08 | 2021-09-08 | Full-automatic balance equipment for packing of camera module plastic support |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN113772168A true CN113772168A (en) | 2021-12-10 |
Family
ID=78841918
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202111052130.6A Pending CN113772168A (en) | 2021-09-08 | 2021-09-08 | Full-automatic balance equipment for packing of camera module plastic support |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113772168A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114933155A (en) * | 2022-07-25 | 2022-08-23 | 四川中星电子有限责任公司 | Automatic prepressing disc discharging device of metallized film capacitor winding machine |
| CN115057061A (en) * | 2022-06-20 | 2022-09-16 | 苏州金万佳塑业有限公司 | Counting and packaging equipment for sterile preservation boxes and working method thereof |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN206939878U (en) * | 2017-06-02 | 2018-01-30 | 深圳市同创精密自动化设备有限公司 | A kind of balance platform apparatus for automatically lifting |
| CN206939210U (en) * | 2017-06-02 | 2018-01-30 | 深圳市同创精密自动化设备有限公司 | A kind of material place machine with balance function |
| CN207374730U (en) * | 2017-09-11 | 2018-05-18 | 广东三三智能科技有限公司 | A kind of automatic material arranging machine |
| CN209410454U (en) * | 2018-12-04 | 2019-09-20 | 丹阳市雷登智能科技有限公司 | A kind of eyeglass automatic feeding |
| CN110745544A (en) * | 2019-11-21 | 2020-02-04 | 深圳市鸿富精研科技有限公司 | Automatic transfer equipment |
| CN211711940U (en) * | 2019-12-18 | 2020-10-20 | 嘉兴博华机械设备有限公司 | Soft magnetic ferrite transport conveyor |
| CN212424454U (en) * | 2020-06-01 | 2021-01-29 | 常州工业职业技术学院 | Carrying and transporting device |
-
2021
- 2021-09-08 CN CN202111052130.6A patent/CN113772168A/en active Pending
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN206939878U (en) * | 2017-06-02 | 2018-01-30 | 深圳市同创精密自动化设备有限公司 | A kind of balance platform apparatus for automatically lifting |
| CN206939210U (en) * | 2017-06-02 | 2018-01-30 | 深圳市同创精密自动化设备有限公司 | A kind of material place machine with balance function |
| CN207374730U (en) * | 2017-09-11 | 2018-05-18 | 广东三三智能科技有限公司 | A kind of automatic material arranging machine |
| CN209410454U (en) * | 2018-12-04 | 2019-09-20 | 丹阳市雷登智能科技有限公司 | A kind of eyeglass automatic feeding |
| CN110745544A (en) * | 2019-11-21 | 2020-02-04 | 深圳市鸿富精研科技有限公司 | Automatic transfer equipment |
| CN211711940U (en) * | 2019-12-18 | 2020-10-20 | 嘉兴博华机械设备有限公司 | Soft magnetic ferrite transport conveyor |
| CN212424454U (en) * | 2020-06-01 | 2021-01-29 | 常州工业职业技术学院 | Carrying and transporting device |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115057061A (en) * | 2022-06-20 | 2022-09-16 | 苏州金万佳塑业有限公司 | Counting and packaging equipment for sterile preservation boxes and working method thereof |
| CN114933155A (en) * | 2022-07-25 | 2022-08-23 | 四川中星电子有限责任公司 | Automatic prepressing disc discharging device of metallized film capacitor winding machine |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106144473A (en) | A kind of mechanical hand location grasping mechanism | |
| CN113772168A (en) | Full-automatic balance equipment for packing of camera module plastic support | |
| CN212639041U (en) | Turnover grabbing mechanism and feeding device | |
| CN210762879U (en) | Automatic disc separating mechanism | |
| CN218319190U (en) | Automatic loading and unloading device | |
| CN211812163U (en) | Empty tray feeding and pushing device for automatic tray placing equipment | |
| CN115180214A (en) | Automatic boxing equipment and boxing method for glassware | |
| CN208022392U (en) | A kind of equipment that optical mirror slip packs feeding blanking automatically | |
| CN213443302U (en) | Automatic box filling machine for blow-molded bottles | |
| CN211168873U (en) | Backboard stacking equipment | |
| CN220412134U (en) | Stacking equipment with automatic discharging structure | |
| CN213168720U (en) | Bearing contract barreled case permutation mechanism | |
| CN215325676U (en) | Column type low-position bottle stacker | |
| CN215297451U (en) | Circuit board boxing system and circuit board production line | |
| CN210640313U (en) | New energy battery piece equipment | |
| CN210881102U (en) | Automatic bottom box feeding machine | |
| CN211846323U (en) | Automatic balance equipment | |
| CN209921656U (en) | Stack plate packaging device | |
| CN210912995U (en) | Automatic glass boxing robot | |
| CN209641768U (en) | A kind of swing arm lithium battery lamination machine | |
| CN110890562A (en) | New energy battery piece equipment | |
| CN112124683A (en) | Automatic box filling machine for blow-molded bottles | |
| CN110561831A (en) | Automatic bottom box feeding machine | |
| CN213356237U (en) | Charging tray feeding and discharging equipment | |
| CN212951386U (en) | Automatic balance packing plant |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| RJ01 | Rejection of invention patent application after publication |
Application publication date: 20211210 |
|
| RJ01 | Rejection of invention patent application after publication |