CN113428544B - 一种单动力斜拉顶升十六轮四向穿梭车 - Google Patents
一种单动力斜拉顶升十六轮四向穿梭车 Download PDFInfo
- Publication number
- CN113428544B CN113428544B CN202110790005.9A CN202110790005A CN113428544B CN 113428544 B CN113428544 B CN 113428544B CN 202110790005 A CN202110790005 A CN 202110790005A CN 113428544 B CN113428544 B CN 113428544B
- Authority
- CN
- China
- Prior art keywords
- jacking
- transverse
- wheel
- longitudinal
- stayed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0492—Storage devices mechanical with cars adapted to travel in storage aisles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G35/00—Mechanical conveyors not otherwise provided for
Abstract
本发明公开了一种单动力斜拉顶升十六轮四向穿梭车,包括支撑框架、横向行走驱动机构、纵向行走驱动机构、斜拉换向及顶升机构和动力输送机构,凸轮换向及顶升机构包括顶升横板、顶升轴和斜拉顶升滑块内,前后两侧的斜拉顶升滑块分别通过连接杆偏心连接传动凸轮,以及左右两侧的两传动凸轮与中心直齿轮齿合连接,中心直齿轮连接十字换减速器的纵向输出轴。本发明的轮换向及顶升机构采用传动凸轮和斜拉顶升滑块联动方式实现顶升轴联动的升降动作,呈四角位置布置的斜拉顶升滑块之间通过四个传动凸轮连接,受力均匀,结构运行稳定;且凸轮换向及顶升机构、横向行走驱动机构以及纵向行走驱动机构联动控制,共用一个驱动电机,大大降低了生产成本。
Description
技术领域
本发明涉及一种穿梭车,尤其涉及一种单动力斜拉顶升十六轮四向穿梭车。
背景技术
穿梭车是与仓库中密集货架配套的常用货物存取设备,包括位于行走系统上的起升机构,该机构的主要作用是将承接货物的托盘按需小行程升降,以便穿梭车之类的存取设备得以进行货物就位操作。现有穿梭车的起升机构有偏心轮杠杆机构、凸轮机构,或者蜗轮蜗杆机构几种,这些机构大多单一使用,在运动过程中均存在起动扭矩大,凸轮易磨损,从动件受力不均匀及传动效率低、耗电量大、制造成本高等缺陷。
此外,现有穿梭车大多采用双向8轮结构设计,过坎能力弱,且故障率高,不仅自身占据了相当大的空间,减少货架及隔层的数量,降低了立体库的空间利用率,还增加了制造、采购及维护成本,已不能满足日益繁忙的仓储物流需要。
发明内容
本发明所要解决的技术问题是:针对现有技术中的上述缺陷,提出一种单动力斜拉顶升十六轮四向穿梭车。
为实现上述目的,本发明采用以下技术方案:
本发明提供一种单动力斜拉顶升十六轮四向穿梭车,包括支撑框架和装设于所述支撑框架上的横向行走驱动机构、纵向行走驱动机构、斜拉换向及顶升机构和动力输送机构,其中:
所述横向行走驱动机构包括分别对称布置于所述支撑框架前后两侧的横向主动轮、第一横向从动轮、第二横向从动轮和第三横向从动轮,两所述横向主动轮之间通过横向传动轴连接;
所述纵向行走驱动机构包括分别对称布置于所述支撑框架左右两侧的第一纵向主动轮、第二纵向主动轮、第一纵向从动轮和第二纵向从动轮,两侧的所述第一纵向主动轮和第二纵向主动轮分别通过纵向传动带连接纵向传动轴;
所述斜拉换向及顶升机构包括分别对称布置于所述支撑框架左右两侧的顶升横板和分别连接所述顶升横板前后两端的顶升轴,且每根所述顶升轴的左右两端分别穿过斜拉顶升滑块内的顶升斜孔连接两端的所述顶升横板,所述斜拉顶升滑块通过滑台设置于所述支撑框架底部;前后两侧的所述斜拉顶升滑块分别通过连接杆偏心连接传动凸轮,以及左右两侧的两所述传动凸轮与中部的中心直齿轮齿合连接;以及
所述动力输送机构包括驱动电机和十字减速器,所述十字减速器的纵向输出轴连接所述纵向传动轴,其横向输出轴分别连接所述横向传动轴和所述中心直齿轮。
进一步地,在所述的单动力斜拉顶升十六轮四向穿梭车上,所述支撑框架的前后两侧壁分别开设四个方形装配孔,所述支撑框架的左右两侧壁分别开设四个圆形装配孔,其中:
两侧的所述横向主动轮和所述第三横向从动轮之间分别通过穿过所述顶升横板、对应所述方形装配孔布置的所述横向传动轴连接,所述第一横向从动轮和第二横向从动轮的轮轴分别穿过对应的所述方形装配孔连接所述顶升横板;
所述第一纵向主动轮和第二纵向主动轮的轮轴分别穿过所述圆形装配孔通过轴承座连接所述支撑框架底部,所述第一纵向从动轮、第二纵向从动轮设置于对应的所述圆形装配孔内。
进一步地,在所述的单动力斜拉顶升十六轮四向穿梭车上,所述横向主动轮通过横向同步带连接同侧的所述第一横向从动轮;和/或通过横向同步带连接同侧的所述第三横向从动轮。
进一步地,在所述的单动力斜拉顶升十六轮四向穿梭车上,所述斜拉顶升滑块上横向开设有左右贯通的顶升斜孔,内侧端面开设有活动孔。
进一步优选地,在所述的单动力斜拉顶升十六轮四向穿梭车上,所述顶升斜孔相对水平面的倾斜角度5-85°,且其内装配有与所述顶升轴相配合的滚轴轴承。
进一步优选地,在所述的单动力斜拉顶升十六轮四向穿梭车上,所述连接杆的一端通过销轴铰接设置于所述活动孔内,另一端通过销轴铰接连接所述凸轮,且前后两所述连接杆呈对称布置。
进一步优选地,在所述的单动力斜拉顶升十六轮四向穿梭车上,所述中心直齿轮底部同轴设置有中心斜齿轮,所述中心斜齿轮通过其一侧布置的蜗杆经电磁离合器连接所述十字减速器的横向输出轴。
进一步优选地,在所述的单动力斜拉顶升十六轮四向穿梭车上,所述中心直齿轮的直径小于所述中心斜齿轮的直径,以及所述中心直齿轮的直径大于所述传动凸轮的直径。
进一步地,在所述的单动力斜拉顶升十六轮四向穿梭车上,所述顶升横板通过其两端开设的导向滑槽上下滑动连接所述支撑框架四角位置的顶升导柱,所述顶升导柱的上下两端分别通过导柱固定板固定连接所述支撑框架。
进一步地,在所述的单动力斜拉顶升十六轮四向穿梭车上,还包括设置于所述纵向传动带外侧的张紧调节机构,其中:
所述张紧调节机构包括贴合于所述纵向传动带两侧布置的第一张紧轮和第二张紧轮,所述第一张紧轮通过第一固定板固定设置于所述支撑框架内侧壁,所述第二张紧轮通过调节板活动设置于所述支撑框架内侧壁。
进一步优选地,在所述的单动力斜拉顶升十六轮四向穿梭车上,所述调节板上水平开设调节方孔,并通过穿设于所述调节方孔内的螺栓活动固定于所述支撑框架内侧壁,且其一端通过调节螺母及螺栓与固定于所述支撑框架内侧壁的第二固定板可调节连接。
本发明采用上述技术方案,与现有技术相比,具有如下技术效果:
(1)斜拉换向及顶升机构采用传动凸轮和斜拉顶升滑块联动方式实现顶升轴联动的升降动作,传动效率高,压力角无变化;且呈四角位置布置的斜拉顶升滑块之间通过四个传动凸轮连接,受力均匀,结构运行稳定;
(2)斜拉换向及顶升机构、横向行走驱动机构及纵向行走驱动机构采用联动控制,共用一个驱动电机,相比现有顶升换向机构节省了两个电机,大大降低了生产成本;且斜拉换向及顶升机构采用蜗杆传动方式连接,并配合大小齿轮结构,传动效率达50%-70%,且滚珠轴套与顶升轴之间通过顶升螺母直接配合连接,减少了动能损失;
(3)两第一斜拉顶升滑块通过第一顶升轴横向布置,两第二斜拉顶升滑块之间通过第二顶升轴横向布置,且第一顶升轴和第二顶升轴之间采用顶升同步带实现同步联动,提高了第一斜拉顶升滑块与第二斜拉顶升滑块升降的一致性,保证了小车运行稳定性;
(4)采用横向8轮纵向8轮及强化的支撑框架,提高了载重能力;并优化了各车轮的安装位置,使小车具有较好的过坎能力;
(5)为匹配16轮,优化了车轮传动机构,通过将纵向传动轴的位置上移,及加大纵向车轮的直径,使小车具有较好的承载能力;
(6)采用张紧调节机构调整第一纵向传动带的张紧度,同时保证第一纵向主动轮和第二纵向主动轮动力传输的稳定性和连续性;
(7)该单动力斜拉顶升十六轮四向穿梭车,结构设计紧凑,设计新颖,运行稳定,既降低成本,又节省空间;且减小了小车整体重量和体积,提升运行能力和货物存取效率。
附图说明
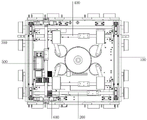
图1为本发明一种单动力斜拉顶升十六轮四向穿梭车的整体结构示意图;
图2为本发明一种单动力斜拉顶升十六轮四向穿梭车的具体结构示意图;
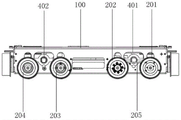
图3为本发明一种单动力斜拉顶升十六轮四向穿梭车的主视结构示意图;
图4为本发明一种单动力斜拉顶升十六轮四向穿梭车的左视结构示意图;
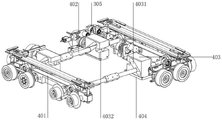
图5为本发明一种单动力斜拉顶升十六轮四向穿梭车的立体结构示意图;
图6为本发明一种单动力斜拉顶升十六轮四向穿梭车中中心直齿轮、中心斜齿轮和蜗杆的仰视装配结构示意图;
图7为本发明一种单动力斜拉顶升十六轮四向穿梭车中中心直齿轮、中心斜齿轮和蜗杆的俯视装配结构示意图;
图8为本发明一种单动力斜拉顶升十六轮四向穿梭车中动力输送机构的传动结构示意图;
图9为本发明一种单动力斜拉顶升十六轮四向穿梭车中横向输出轴的传动结构示意图;
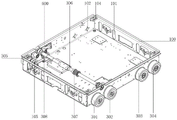
图10为本发明一种单动力斜拉顶升十六轮四向穿梭车中支撑框架的结构示意图;
图11为本发明一种单动力斜拉顶升十六轮四向穿梭车中张紧调节机构的装配结构示意图;
其中,各附图标记为:
100-支撑框架,101-方形装配孔,102-圆形装配孔,103-顶升导柱,104-导柱固定板,105-轴承座;
200-横向行走驱动机构,201-横向主动轮,202-第一横向从动轮,203-第二横向从动轮,204-第三横向从动轮,205-横向传动带,206-横向传动轴,207-横向电机;
300-纵向行走驱动机构,301-第一纵向主动轮,302-第二纵向主动轮,303-第一纵向从动轮,304-第一纵向从动轮,305-纵向传动带,306-纵向传动轴,307-纵向电机;
400-斜拉换向及顶升机构,401-顶升横板,402-斜拉顶升滑块,403-斜拉顶升滑块,404-滑台,405-连接杆,406-传动凸轮,407-中心直齿轮,408-中心斜齿轮,409-蜗杆,410-导向滑槽;
500-动力输送机构,501-驱动电机,502-十字减速器,503-纵向主传动轮,504-横向主转动轮,505-横向输出轴,506-电磁离合器,5061-旋转轮,5062-电磁压盘,5063-从动轮;
600-张紧调节机构,601-第一张紧轮,602-第一固定板,603-第二张紧轮,604-调节板,605-调节方孔,606-第二固定板。
具体实施方式
下面通过具体实施例对本发明进行详细和具体的介绍,以使更好的理解本发明,但是下述实施例并不限制本发明范围。
在一些实施例中,如图1所示,提供一种单动力斜拉顶升十六轮四向穿梭车,包括支撑框架100和装设于支撑框架100上的横向行走驱动机构200、纵向行走驱动机构300、斜拉换向及顶升机构400和动力输送机构500,此外还包括电池组和控制器。
在其中的一个实施例中,支撑框架100是通过钣金折弯及局部加强筋连成的一个整体,极大提高整车的承载能力;电池组作为动力源给整车提高动力,电池组可采用锂离子可充电电池、蓄电池或其他任何蓄能电池,为小车各功能电源供电;控制器作为整车的大脑,控制整车的运动,控制器电连接电池组、动力输送机构500,通过控制器控制小车灵活径向纵向或横向行走,并通过斜拉换向及顶升机构400实现小车顶升和换向。
在一些实施例中,如图2和图3所示,横向行走驱动机构200作为十六轮四向穿梭车横向移动的执行单元,其包括分别对称布置于支撑框架100前后两侧的横向主动轮201、第一横向从动轮202、第二横向从动轮203和第三横向从动轮204,其中,横向主动轮201、第一横向从动轮202、第二横向从动轮203和第三横向从动轮204均为两个布置在支撑框架100的前后两侧位置,形成横向8轮车体结构,提高了小车的横向行走的载重能力和过坎能力。
在其中的一个实施例中,如图2和图4所示,两横向主动轮201和两第三横向从动轮204分别设置于横向传动轴206两端,两横向主动轮201之间的横向传动轴206为主动轴与十字减速器502的横向输出轴;两第三横向从动轮204之间的横向传动轴206为连接轴。通过横向传动轴206可带动两端的横向主动轮201转动,且在横向传动轴206上设置有横向联轴器;为提高小车的运行稳定性,两第三横向从动轮204之间通过作为连接轴的横向传动轴206连接,同步保证两侧第三横向从动轮204同步运行,且该作为连接轴的横向传动轴206也同样可通同步带连接十字减速器502的横向输出轴,实现前后双驱转动。
该十六轮四向穿梭车中横向行走驱动机构200的工作原理为:通过动力输送机构500控制横向传动轴206转动,同步带动横向传动轴206两端的横向主动轮201转动,并同步带动支撑框架100上的第一横向从动轮202、第二横向从动轮203和第三横向从动轮204转动,实现该十六轮四向穿梭车的横向行走。
在一些实施例中,如图2和图3所示,纵向行走驱动机构300作为十六轮四向穿梭车横向移动的执行单元,其包括分别对称布置于支撑框架100左右两侧的第一纵向主动轮301、第二纵向主动轮302、第一纵向从动轮303和第二纵向从动轮304,其中第一纵向主动轮301、第二纵向主动轮302、第一纵向从动轮303和第二纵向从动轮304均为两个,呈对称布置在支撑框架100的两侧位置,形成纵向8轮车体结构,提高了小车纵向行走的载重能力和过坎能力。
在其中的一个实施例中,如图2和图3所示,两侧的第一纵向主动轮301和第二纵向主动轮302作为主动轮,分别通过纵向传动带305连接纵向传动轴306,且纵向传动轴306通过传动带传动连接动力输送机构500,由动力输送机构500通过传动带驱动纵向传动轴306转动。
在其中的一个实施例中,为匹配16轮,优化了纵向车轮的传动机构,将纵向传动轴306的位置上移,如图10和图11所示,使纵向传动轴306、第一纵向主动轮301和第二纵向主动轮302的装配结构在其侧面形成三角结构,一方面采用一根纵向传动轴306同步带动第一纵向主动轮301和第二纵向主动轮302同时转动,另一方面抬升布置的纵向传动轴306可很好的错开其下方布置的斜拉换向及顶升机构400,使得小车设计更为紧凑、合理,节省了空间。
在其中的一个实施例中,为使得小车具有较好的承载能力,相比横向行走驱动机构200所采用的8个横向车轮,纵向行走驱动机构300上所采用的8个纵向车轮均采用先较大直接的纵向车轮。具体地,横向主动轮201、第一横向从动轮202、第二横向从动轮203和第三横向从动轮204的直径略小于第一纵向主动轮301、第二纵向主动轮302、第一纵向从动轮303和第二纵向从动轮304的直径,其直径比为1:1.1-1:1.3,优选地,其直径比为1:1.2。
该十六轮四向穿梭车中纵向行走驱动机构300的工作原理为:由动力输送机构500通过传动带驱动纵向传动轴306转动,同步带动纵向传动轴306两端的第一纵向主动轮301、第二纵向主动轮302转动,并同步带动支撑框架100上的第一纵向从动轮303和第二纵向从动轮304转动,实现该十六轮四向穿梭车的纵向行走,且在纵向传动轴306上设置有纵向联轴器。此外,传动带在工作一段时间后重新张紧,可根据皮带轮的松紧情况,采用张紧调节机构600横向移动达到调节的目的。
在一些实施例中,如图2、图5、图6和图7所示,斜拉换向及顶升机构400作为十六轮四向穿梭车上下顶升和换向的执行单元,其包括分别对称布置于所述支撑框架100左右两侧的顶升横板401和分别连接所述顶升横板401前后两端的顶升轴402,即两侧的顶升横板401分别通过前后端两端顶升轴402连接,以在顶升轴402的上升及下降过程中实现顶升横板401的顶升和行走驱动机构的换向动作。
具体地,如图2、图5、图6和图7所示,每根所述顶升轴402的左右两端分别穿过斜拉顶升滑块403内的顶升斜孔4031连接两端的所述顶升横板401,所述斜拉顶升滑块403通过滑台404设置于所述支撑框架100底部,滑台404固定设置在支撑框架100底部的顶部,顶升滑块403的下端卡扣设置在滑台404内,并仅能沿滑台404进行前后移动,以在顶升滑块403前后移动的过程中利用顶升斜孔4031驱使其内设置的顶升轴402上升或下降。
此外,每个所述斜拉顶升滑块403分别通过连接杆405一一对应偏心连接一个单独的传动凸轮406,以及左右两侧的两个所述传动凸轮406与中部的中心直齿轮407齿合传动连接,四个传动凸轮406分别布置在中心直齿轮407的外侧。所述中心直齿轮407连接动力输送机构500的横向输出轴,通过中心直齿轮407将动力经传动凸轮406传递斜拉顶升滑块403,以控制斜拉顶升滑块403沿滑台404进行前后移动。
在其中的一个实施例中,如图2、图5、图6和图7所示,斜拉顶升滑块403为四个,分别设置在支撑框架100的四角位置,且各斜拉顶升滑块403结构和工作原理相同。斜拉顶升滑块403在横向驱动电机207的驱动下相对支撑框架100做上下升降运动,同时通过顶升横板401带动两侧的横向主动轮201、第一横向从动轮202、第二横向从动轮203和第三横向从动轮204升降,灵活实现横向行走驱动机构200和纵向行走驱动机构300的换向功能。
该十六轮四向穿梭车中斜拉换向及顶升机构400的工作原理为:由动力输送机构500通过蜗杆209驱动中心直齿轮407转动,中心直齿轮407同步带动四周的四个传动凸轮406传动,传动凸轮406在传动的同时带动其上的连接杆405做偏心运动,每个连接杆405驱动对应的斜拉顶升滑块403沿滑台404前后移动,斜拉顶升滑块403在前后移动的过程中同步带动其内的顶升轴402沿顶升斜孔4031在垂直方向做上下移动,继而带动顶升轴402两端的顶升横板401及其顶部的顶升平台升降,实现小车顶升及换向功能。
在一些实施例中,如图2和图8所示,所述动力输送机构500包括驱动电机501和十字减速器502,所述十字减速器502的纵向输出轴连接所述纵向传动轴306,其横向输出轴分别连接所述横向传动轴206和所述中心直齿轮407。具体地,十字减速器502上纵向输出轴端的纵向主动轮503通过同步带与纵向传动轴306,用于控制纵向行走驱动机构300进行行走。十字减速器502上横向d输出轴端的横向主动轮504通过同步带与横向传动轴206,用于控制横向行走驱动机构200进行行走。
此外,如图2和图8所示,该十字减速器502上横向d输出轴端还轴连接有横向输出轴505,所述横向输出轴505通过电磁离合器506连接蜗杆209,通过横向输出轴505和电磁离合器506控制蜗杆209转动。该动力输送机构500通过采用十字减速器502、电磁离合器506和蜗杆209的结构设计,采用一个驱动电机501实现了对横向行走驱动机构200、纵向行走驱动机构300和斜拉换向及顶升机构400的独立控制,相比现有顶升换向机构,节省了两个电机,大大降低了生产成本。
在一种的一个实施例中,如图9所述,该电磁离合器506包括采用市售微型电磁离合器,其是一种利用电磁铁吸力操纵的自动电器,具体结构原理在此不再赘述。该电磁离合器506包括旋转轮5061、电磁压盘5062和从动轮5063,其中,旋转轮5061轴连接横向输出轴505的端部,从动轮5063轴连接蜗杆209的端部,按照工作的需要,旋转轮5061与从动轮5063之间通过电磁压盘5062分离或结合,以将驱动电机501的动力通过横向输出轴505和该电磁离合器506传递给蜗杆209,通过蜗杆209控制中心斜齿轮408和中心直齿轮407转动或停止,继而实现对斜拉顶升滑块403的顶升控制。
在一些实施例中,如图9所示,支撑框架100是通过钣金折弯及局部加强筋连成的一个整体,在支撑框架100的前后两侧壁分别开设四个用于装配横向车轮的方形装配孔101,相对应的在支撑框架100的左右两侧壁分别开设四个用于装配纵向车轮的圆形装配孔102。
在其中的一个实施例中,如图2、图4和图5所示,两侧的所述横向主动轮201和所述第三横向从动轮204之间分别通过穿过所述顶升横板401、对应所述方形装配孔101布置的所述横向传动轴206连接;第一横向从动轮202和第二横向从动轮203的轮轴分别穿过对应的方形装配孔101连接顶升横板401。此外,为配合斜拉换向及顶升机构400的顶升及换向功能,横向主动轮201、第一横向从动轮202和第二横向从动轮203以及第三横向从动轮204可随顶升横板401在相应的方形装配孔101内进行上下限位升降。
在其中的一个实施例中,如图2、图3和图5所示,第一纵向主动轮301和第二纵向主动轮302的轮轴分别穿过相应的圆形装配孔102连接纵向传动轴306,由纵向传动轴306通过第一纵向传动带308带动第一纵向主动轮301和第二纵向主动轮302同步转动,提高小车的运载能力;此外,该第一纵向主动轮301和第二纵向主动轮302的轮轴分别穿过圆形装配孔102布置,并通过轴承座105固定连接在支撑框架100的底部,保证了第一纵向主动轮301和第二纵向主动轮302在转动过程中的稳定性。
在其中的一个实施例中,如图2、图3和图5所示,第一纵向从动轮303、第二纵向从动轮304作为从动轮,在支撑框架100的带动的被动运行,主要起到支撑和导向作用,该第一纵向从动轮303、第二纵向从动轮304固定设置在对应的圆形装配孔102内。
在一些实施例中,如图2、图4和图5所示,对该十六轮四向穿梭车的车轮安装结构进行了优化,将第一横向从动轮202作为小车的辅助主动轮,进一步提高了小车的横向抓地和过坎能力。具体地,将横向主动轮201通过第二横向传动带205连接同侧的第一横向从动轮202,及通过第二横向传动带205将横向主动轮201的动力输送给第一横向从动轮202,同步带动第一横向从动轮202转动。
此外,根据实际小车运行需要,还可以通过第二横向传动带205连接同侧的第三横向从动轮204,将第三横向从动轮204为横向主动轮201的联动机构,从而进一步提高了小车的横向行走的稳定性和抓地和过坎能力。
在一些实施例中,如图1、图10和图11所示,为保证纵向行走驱动机构300动力传输的稳定性,该十六轮四向穿梭车中,还包括设置于第一纵向传动带308外侧的张紧调节机构600,通过张紧调节机构600优化了第一纵向传动带308与第一纵向主动轮301、第二纵向主动轮302之间连接,使第一纵向传动带308更方便安装。
在其中的一个实施例中,如图11所示,张紧调节机构600包括贴合于第一纵向传动带308外侧布置的第一张紧轮601和第二张紧轮603,第一张紧轮601通过第一固定板602固定设置于支撑框架100内侧壁,第一张紧轮601固定不动,始终位于第一张紧轮601和纵向传动轴306之间位置,并始终与第一纵向传动带308呈贴合状态;而第二张紧轮603则可以通过调节板604活动设置于支撑框架100内侧壁,及第二张紧轮603在调节板604的调节作用下,可相对第二张紧轮603向纵向传动轴306产生相对位移,压紧贴合于第一纵向传动带308的另一侧端面,对第一纵向传动带308形成张紧状态;或移动第二张紧轮603远离纵向传动轴306,使其与第一纵向传动带308脱离,消除第一纵向传动带308张紧状态。
在其中的一个实施例中,如图11所示,调节板604上水平开设调节方孔605,并通过穿设于调节方孔605内的螺栓活动固定于支撑框架100内侧壁,该调节方孔605在螺栓的作用下起到一定的限位作用,调节方孔605的长度决定了该第二张紧轮603左右可调节的间距,以满足第一纵向传动带308张紧需要。
在其中的一个实施例中,如图11所示,在调节板604的远端通过调节螺母及螺栓与第二固定板606可调节连接,通过调节螺母及螺栓可控制调节板604及其上的第二张紧轮603沿调节方孔605的长度方向进行左右移动,以调节的第一纵向传动带308张紧度,第二固定板606固定于支撑框架100内侧壁。调节板604和第二固定板606均采用L型板,且其侧端面呈相对布置,调节螺母及螺栓设置在该相对布置的L型板上,调节螺母及螺栓的调节方式采用现有常规结构实现,在此不再赘述。
在其中的一个实施例中,如图5所示,所述斜拉顶升滑块403上横向开设有左右贯通的顶升斜孔4031,内侧端面开设有活动孔4032。所述顶升斜孔4031相对水平面的倾斜角度5-85°。优选地,顶升斜孔342的倾斜角度为20-80°;进一步优选地,顶升斜孔4031的倾斜角度为35-65°;较为优选地,顶升斜孔4031的倾斜角度为35-65°;更为优选地,顶升斜孔4031的倾斜角度为40-45°。
在其中的一个实施例中,为提高顶升轴402和斜拉顶升滑块403相对运动的稳定性,在斜拉顶升滑块403是顶升斜孔4031你的内装配有与所述顶升轴402相配合的滚轴轴承。所述连接杆405的一端通过销轴铰接设置于所述活动孔4032内,另一端通过销轴铰接连接所述凸轮406,且前后两所述连接杆405呈中心对称布置。
在其中的一个实施例中,如图6和图7所示,所述中心直齿轮407底部同轴设置有中心斜齿轮408,所述中心斜齿轮408通过其一侧布置的蜗杆409连接所述十字减速器502的纵向输出轴,十字减速器502连接横向驱动电机207。
在其中的一个实施例中,如图10所示,为保证斜拉换向及顶升机构400在顶升及换向过程中的稳定性,在顶升横板401通过其两端开设的导向滑槽410上下滑动连接支撑框架100四角位置的顶升导柱103,顶升横板401的两端在升降过程中可沿顶升导柱103滑动,避免了顶升横板401在顶升过程中左右晃动的缺陷;且顶升导柱103的上下两端分别通过导柱固定板104固定连接支撑框架100,上下两端设置的导柱固定板104同时对顶升横板401的升降起到限位作用。
本发明提供的单动力斜拉顶升十六轮四向穿梭车,采用每侧8个车轮,形成16轮双向行走小车的结构设计,大大提高小车的载重能力和过坎能力;斜拉换向及顶升机构采用传动凸轮和斜拉顶升滑块联动方式实现顶升轴联动的升降动作,传动效率高,压力角无变化;且呈四角位置布置的斜拉顶升滑块之间通过两个传动凸轮连接,受力均匀,结构运行稳定;斜拉换向及顶升机构、横向行走驱动机构以及纵向行走驱动机构联动控制,共用一个驱动电机,相比现有顶升换向机构节省了两个电机,大大降低了生产成本。该单动力斜拉顶升十六轮四向穿梭车的结构设计紧凑,既降低成本,又节省空间;且减小了小车整体重量和体积,提升运行能力和货物存取效率。
以上对本发明的具体实施例进行了详细描述,但其只是作为范例,本发明并不限制于以上描述的具体实施例。对于本领域技术人员而言,任何对本发明进行的等同修改和替代也都在本发明的范畴之中。因此,在不脱离本发明的精神和范围下所作的均等变换和修改,都应涵盖在本发明的范围内。
Claims (5)
1.一种单动力斜拉顶升十六轮四向穿梭车,其特征在于,包括支撑框架(100)和装设于所述支撑框架(100)上的横向行走驱动机构(200)、纵向行走驱动机构(300)、斜拉换向及顶升机构(400)和动力输送机构(500),其中:
所述横向行走驱动机构(200)包括分别对称布置于所述支撑框架(100)前后两侧的横向主动轮(201)、第一横向从动轮(202)、第二横向从动轮(203)和第三横向从动轮(204),两所述横向主动轮(201)之间通过横向传动轴(206)连接;
所述纵向行走驱动机构(300)包括分别对称布置于所述支撑框架(100)左右两侧的第一纵向主动轮(301)、第二纵向主动轮(302)、第一纵向从动轮(303)和第二纵向从动轮(304),两侧的所述第一纵向主动轮(301)和第二纵向主动轮(302)分别通过纵向传动带(305)连接纵向传动轴(306);以及
所述斜拉换向及顶升机构(400)包括分别对称布置于所述支撑框架(100)左右两侧的顶升横板(401)和分别连接所述顶升横板(401)前后两端的顶升轴(402),且每根所述顶升轴(402)的左右两端分别穿过斜拉顶升滑块(403)内的顶升斜孔(4031)连接两端的所述顶升横板(401),所述斜拉顶升滑块(403)通过滑台(404)设置于所述支撑框架(100)底部;每个所述斜拉顶升滑块(403)均通过连接杆(405)一一对应偏心连接传动凸轮(406),以及四个所述传动凸轮(406)与中部的中心直齿轮(407)齿合连接;所述斜拉顶升滑块(403)上横向开设有左右贯通的顶升斜孔(4031),内侧端面开设有活动孔(4032);所述顶升斜孔(4031)相对水平面的倾斜角度5-85°,且其内装配有与所述顶升轴(402)相配合的滚轴轴承;
所述动力输送机构(500)包括驱动电机(501)和十字减速器(502),所述十字减速器(502)的纵向输出轴连接所述纵向传动轴(306),其横向输出轴分别连接所述横向传动轴(206)和所述中心直齿轮(407);
所述连接杆(405)的一端通过销轴铰接设置于所述活动孔(4032)内,另一端通过销轴铰接连接所述凸轮(406),且相邻的两所述连接杆(405)呈对称布置;
所述中心直齿轮(407)底部同轴设置有中心斜齿轮(408),所述中心斜齿轮(408)通过其一侧布置的蜗杆(409)经电磁离合器(506)连接十字减速器(502)的横向输出轴;
所述支撑框架(100)的前后两侧壁分别开设四个方形装配孔(101),所述支撑框架(100)的左右两侧壁分别开设四个圆形装配孔(102),其中:
两侧的所述横向主动轮(201)和所述第三横向从动轮(204)之间分别通过穿过所述顶升横板(401)、对应所述方形装配孔(101)布置的所述横向传动轴(206)连接,所述第一横向从动轮(202)和第二横向从动轮(203)的轮轴分别穿过对应的所述方形装配孔(101)连接所述顶升横板(401);
所述第一纵向主动轮(301)和第二纵向主动轮(302)的轮轴分别穿过所述圆形装配孔(102)通过轴承座(105)连接所述支撑框架(100)底部,所述第一纵向从动轮(303)、第二纵向从动轮(304)设置于对应的所述圆形装配孔(102)内。
2.根据权利要求1所述的单动力斜拉顶升十六轮四向穿梭车,其特征在于,所述横向主动轮(201)通过横向同步带(205)连接同侧的所述第一横向从动轮(202);和/或通过横向同步带(205)连接同侧的所述第三横向从动轮(204)。
3.根据权利要求1所述的单动力斜拉顶升十六轮四向穿梭车,其特征在于,所述顶升横板(401)通过其两端开设的导向滑槽(410)上下滑动连接所述支撑框架(100)四角位置的顶升导柱(103),所述顶升导柱(103)的上下两端分别通过导柱固定板(104)固定连接所述支撑框架(100)。
4.根据权利要求1所述的单动力斜拉顶升十六轮四向穿梭车,其特征在于,还包括设置于所述纵向传动带(305)外侧的张紧调节机构(600),其中:
所述张紧调节机构(600)包括贴合于所述纵向传动带(305)两侧布置的第一张紧轮(601)和第二张紧轮(603),所述第一张紧轮(601)通过第一固定板(602)固定设置于所述支撑框架(100)内侧壁,所述第二张紧轮(603)通过调节板(604)活动设置于所述支撑框架(100)内侧壁。
5.根据权利要求4所述的单动力斜拉顶升十六轮四向穿梭车,其特征在于,所述调节板(604)上水平开设调节方孔(605),并通过穿设于所述调节方孔(605)内的螺栓活动固定于所述支撑框架(100)内侧壁,且其一端通过调节螺母及螺栓与固定于所述支撑框架(100)内侧壁的第二固定板(606)可调节连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110790005.9A CN113428544B (zh) | 2021-07-13 | 2021-07-13 | 一种单动力斜拉顶升十六轮四向穿梭车 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202110790005.9A CN113428544B (zh) | 2021-07-13 | 2021-07-13 | 一种单动力斜拉顶升十六轮四向穿梭车 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN113428544A CN113428544A (zh) | 2021-09-24 |
| CN113428544B true CN113428544B (zh) | 2022-10-25 |
Family
ID=77760164
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202110790005.9A Active CN113428544B (zh) | 2021-07-13 | 2021-07-13 | 一种单动力斜拉顶升十六轮四向穿梭车 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN113428544B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114435821B (zh) * | 2021-12-10 | 2024-03-19 | 隆链智能科技(上海)有限公司 | 四向传动机构 |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105346125A (zh) * | 2015-12-03 | 2016-02-24 | 宁波博信机械制造有限公司 | 一种用于冲床的双点偏心齿轮多连杆机构 |
| CN206828516U (zh) * | 2017-06-13 | 2018-01-02 | 四川农业大学 | 一种分区微生物培养摇床 |
| CN107685354A (zh) * | 2017-09-29 | 2018-02-13 | 瑞安市鹏洲印刷机械有限公司 | 一种立式自动压痕机 |
| CN209147597U (zh) * | 2018-10-30 | 2019-07-23 | 温州杰凯汽车部件有限公司 | 一种汽车零部件干燥设备 |
| DE102019124537A1 (de) * | 2019-09-12 | 2021-03-18 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Fahrzeug zur automatischen Bedienung eines mehrere übereinander und miteinander fluchtende Reihen von Fahrschienen aufweisenden Lagerregals |
| CN212558100U (zh) * | 2020-05-19 | 2021-02-19 | 昆明欧迈科技有限公司 | 一种四向穿梭车车轮换向机构 |
| CN212576371U (zh) * | 2020-06-04 | 2021-02-23 | 东莞市康柏测量仪器有限公司 | 一种高效的陶瓷废料破碎机 |
| CN112093349B (zh) * | 2020-09-15 | 2022-01-18 | 隆链智能科技(上海)有限公司 | 一种顶升联动式十六轮四向穿梭车 |
| CN215363151U (zh) * | 2021-07-13 | 2021-12-31 | 隆链智能科技(上海)有限公司 | 一种单动力十六轮四向穿梭车 |
-
2021
- 2021-07-13 CN CN202110790005.9A patent/CN113428544B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN113428544A (zh) | 2021-09-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112079030B (zh) | 一种横向电磁联动式十六轮四向穿梭车 | |
| CN112093349B (zh) | 一种顶升联动式十六轮四向穿梭车 | |
| CN112079031B (zh) | 一种斜拉顶升换向式十六轮四向穿梭车 | |
| CN202897946U (zh) | 一种动车组空气弹簧更换装置 | |
| WO2019114170A1 (zh) | 车辆提升机构及自动换电系统 | |
| CN111591659A (zh) | 一种四向行走小车 | |
| CN106672853B (zh) | 一种全承载式客车动力总成装配方法及工装 | |
| CN107816238A (zh) | 梳齿升降伸缩式智能搬运器 | |
| CN113428544B (zh) | 一种单动力斜拉顶升十六轮四向穿梭车 | |
| CN215363151U (zh) | 一种单动力十六轮四向穿梭车 | |
| CN215515238U (zh) | 一种联动式十六轮四向穿梭车 | |
| CN113135375A (zh) | 一种新型四向穿梭车 | |
| CN114751125A (zh) | 一种基于内制凸轮轮廓控制的四向穿梭车 | |
| CN112027462A (zh) | 一种纵向电磁联动式十六轮四向穿梭车 | |
| CN112093350A (zh) | 一种十六轮四向穿梭车 | |
| CN113306945B (zh) | 一种凸轮升降式十六轮四向穿梭车 | |
| CN110817491B (zh) | 一种煤炭装车的智能平煤装置 | |
| CN108609197A (zh) | 一种滑橇式直升机地面全向移动装置 | |
| CN215946644U (zh) | 一种楼梯间货物载运车 | |
| CN212291499U (zh) | 一种四向行走小车 | |
| CN212374153U (zh) | 一种重型四向穿梭车 | |
| CN212639812U (zh) | 一种新型提升机 | |
| CN112046641B (zh) | 一种限位板随移动速度变化自动升降的铝合金板材运输车 | |
| CN114906530B (zh) | 一种四向车纵向联动式换向顶升机构 | |
| CN207725371U (zh) | 一种电动汽车换电设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right | ||
| PE01 | Entry into force of the registration of the contract for pledge of patent right |
Denomination of invention: A single power cable-stayed jack up sixteen wheel four-way shuttle car Effective date of registration: 20230926 Granted publication date: 20221025 Pledgee: Agricultural Bank of China Limited Shanghai Huangpu Sub branch Pledgor: LONLINK INTELLIGENT TECHNOLOGY (SHANGHAI) CO.,LTD. Registration number: Y2023310000607 |