CN114751125A - 一种基于内制凸轮轮廓控制的四向穿梭车 - Google Patents
一种基于内制凸轮轮廓控制的四向穿梭车 Download PDFInfo
- Publication number
- CN114751125A CN114751125A CN202210407240.8A CN202210407240A CN114751125A CN 114751125 A CN114751125 A CN 114751125A CN 202210407240 A CN202210407240 A CN 202210407240A CN 114751125 A CN114751125 A CN 114751125A
- Authority
- CN
- China
- Prior art keywords
- jacking
- vertical plate
- cam profile
- sheet metal
- metal shell
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000002184 metal Substances 0.000 claims abstract description 35
- 238000010009 beating Methods 0.000 claims description 14
- 230000005540 biological transmission Effects 0.000 claims description 13
- 239000007788 liquid Substances 0.000 abstract description 3
- 238000005096 rolling process Methods 0.000 description 13
- 238000010586 diagram Methods 0.000 description 3
- 230000002457 bidirectional effect Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 238000005265 energy consumption Methods 0.000 description 2
- 230000007613 environmental effect Effects 0.000 description 2
- 230000002349 favourable effect Effects 0.000 description 2
- 230000001360 synchronised effect Effects 0.000 description 2
- 230000009286 beneficial effect Effects 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000000280 densification Methods 0.000 description 1
- 238000004134 energy conservation Methods 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G1/00—Storing articles, individually or in orderly arrangement, in warehouses or magazines
- B65G1/02—Storage devices
- B65G1/04—Storage devices mechanical
- B65G1/0492—Storage devices mechanical with cars adapted to travel in storage aisles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Abstract
本发明公开了一种基于内制凸轮轮廓控制的四向穿梭车,包括车体,所述车体包括钣金外壳,所述钣金外壳上设置有直行机构,所述钣金外壳的内侧设置有支撑立板,所述支撑立板和钣金外壳之间设置有顶升组件;所述顶升组件包括固定连接的顶升板和顶升立板,所述顶升立板设置于顶升板的底部并置于钣金外壳和支撑立板之间;此装置可多向行驶,跨巷道作业,配合配套提升设备,也可跨层作业,更加高效、灵活,不受空间限制,充分利用空间,利用丝杠轮螺母机构与凸轮轮廓的配合运行,实现小车的顶升、换向功能的方式,代替了连杆结构或液压顶杆机构,降低了自重及车体高度,简化了车体内部结构,杜绝了液体渗漏等问题,同时获得了更高的载重能力。
Description
技术领域
本发明涉及货物运输技术领域,特别涉及一种基于内制凸轮轮廓控制的四向穿梭车。
背景技术
随着现代科技的不断进步发展,物流仓储中心存取业务类型越来越多样化、复杂化,传统自动化立体仓库的往复式双向穿梭车难以全部满足日益增长的仓储密集化、成本低廉化、需求定制化的要求,迫切需要更加快速、灵巧、低成本、高效率、高信息化集成的设备来补充双向穿梭车的空白领域。
目前市场上四向穿梭车承载能力较差,结构上多采用连杆顶升机构或液压顶杆机构实现货物顶升或运行方式的切换。连杆顶升机构复杂,顶升占用机体内部空间,能耗高,可维护性较差;液压顶杆机构,易渗油,泄露,环保性较差;整机高度较高,导致货架的整体空间占用率下降。
因此,有必要提供一种基于内制凸轮轮廓控制的四向穿梭车解决上述技术问题。
发明内容
本发明的目的在于提供一种基于内制凸轮轮廓控制的四向穿梭车,以解决上述背景技术中提出的目前市场上四向穿梭车承载能力较差,结构上多采用连杆顶升机构或液压顶杆机构实现货物顶升或运行方式的切换。连杆顶升机构复杂,顶升占用机体内部空间,能耗高,可维护性较差;液压顶杆机构,易渗油,泄露,环保性较差;整机高度较高,导致货架的整体空间占用率下降的问题。
基于上述思路,本发明提供如下技术方案:包括车体,所述车体包括钣金外壳,所述钣金外壳上设置有直行机构,所述钣金外壳的内侧设置有支撑立板,所述支撑立板和钣金外壳之间设置有顶升组件;
所述顶升组件包括固定连接的顶升板和顶升立板,所述顶升立板设置于顶升板的底部并置于钣金外壳和支撑立板之间,所述支撑立板和顶升立板均与钣金外壳滑动连接,所述支撑立板上设置有横行机构,当顶升板将货物顶起时,车体通过选择直行机构或者横行机构促使其在巷道内直行或者横行。
作为本发明进一步的方案:所述直行机构包括安装在钣金外壳内的行走电机,所述钣金外壳的两侧均设置有与行走电机传动连接的直行轮。
作为本发明进一步的方案:所述横行机构包括设置于支撑立板上的横行轮,所述行走电机的另一个输出端与横行轮传动连接。
作为本发明进一步的方案:所述钣金外壳内安装有驱动电机,所述钣金外壳的左右两侧均设置有丝杠,所述驱动电机与丝杠传动连接,所述钣金外壳内位于丝杠的底端固定安装有滑轨,所述丝杠上螺纹配合有轮螺母,所述轮螺母的底端固定连接有滑块,所述滑块与滑轨滑动连接,所述轮螺母的内外两侧均通过连接轴转动设置有滚动轴承。
作为本发明进一步的方案:所述顶升立板上设置有凸轮轮廓,凸轮轮廓上包括相互接通的第一顶升部和第一保持部,第一顶升部为弧形段,而第一保持部为直线段。
作为本发明进一步的方案:所述支撑立板的侧面上开设有反向凸轮轮廓,所述反向凸轮轮廓包括第二顶升部和第二保持部,并且第二顶升部与第一顶升部相对,第二保持部与第一保持部相对,所述第二顶升部与第一顶升部的走向相反。
作为本发明进一步的方案:所述钣金外壳的前后两端均转动设置有直行轴,直行轮安装于直行轴的两端,所述钣金外壳上转动设置有直行驱动轴,行走电机的一个输出端与直行驱动轴之间、直行驱动轴与直行轴之间均通过链轮与链条配合的方式进行传动。
作为本发明进一步的方案:所述行走电机的另一个输出端通过换向齿轮组传动连接有横行驱动轴,所述横行驱动轴通过联轴器与传动轴和支撑立板上的横行轮相连接。
作为本发明进一步的方案:所述钣金外壳内安装有基座,所述丝杠与基座转动连接。
与现有技术相比,本发明的有益效果是:通过丝杠转动带动支撑轴承移动,此时支撑轴承将从第一顶升部移动到第一保持部内,从而保持顶升板的顶起状态,从而对货物稳定支撑,同时,支撑轴承将从第二保持部内动到第二顶升部处,从而带动支撑立板向下移动,使得支撑立板上的横行轮与巷道相接触并将直行轮顶起,从而使得车体能够横向移动,进而对货物进行横向运输,此装置可多向行驶,跨巷道作业,配合配套提升设备,也可跨层作业,更加高效、灵活,不受空间限制,充分利用空间,利用丝杠轮螺母机构与凸轮轮廓的配合运行,实现小车的顶升、换向功能的方式,代替了连杆结构或液压顶杆机构,降低了自重及车体高度,简化了车体内部结构,杜绝了液体渗漏等问题,同时获得了更高的载重能力。
附图说明
下面结合附图和实施例对本发明进一步说明。
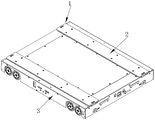
图1是本发明的整体结构示意图;
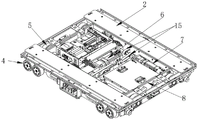
图2是本发明的车体内部结构示意图;
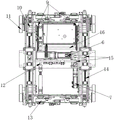
图3是本发明的车体内部结构俯视图;
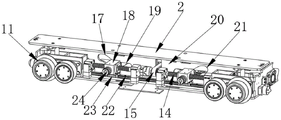
图4是本发明的丝杠结构示意图;
图5是本发明的支撑立板结构示意图;
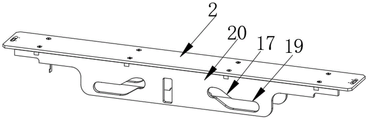
图6是本发明的顶升立板和顶升板结构示意图;
图7是本发明的第一实施例结构示意图;
图8是本发明的第二实施例结构示意图;
图9是本发明的第三实施例结构示意图。
图中:1、车体;2、顶升板;3、钣金外壳;4、直行机构;5、横行机构;6、行走电机;7、驱动电机;8、支撑立板;9、链条;10、直行轴;11、直行轮;12、横行驱动轴;13、横行轮;14、丝杠;15、同步带;16、直行驱动轴;17、第一顶升部;18、轮螺母; 19、第一保持部;20、顶升立板;21、凸轮轮廓;22、滑轨;23、滑块;24、滚动轴承; 25、第二顶升部;26、第二保持部;27、反向凸轮轮廓。
具体实施方式
如图1-3所示,一种基于内制凸轮轮廓控制的四向穿梭车,包括车体1,车体1包括钣金外壳3,在钣金外壳3上设置有直行机构4,同时在钣金外壳3的内侧设置有支撑立板8,支撑立板8和钣金外壳3之间设置有顶升组件,顶升组件包括固定连接的顶升板2 和顶升立板20,顶升立板20设置于顶升板2的底部并置于钣金外壳3和支撑立板8之间,并且支撑立板8和顶升立板20均与钣金外壳3滑动连接,除此之外,在支撑立板8上设置有横行机构5。
此装置主要用于立体仓库中的巷道中,实际使用时,车体1通过直行机构4移动至货物的底部,此时顶升立板20和顶升板2向上移动将货物顶起,如果不需要转换运行方向,可以通过直行机构4直接驱动车体1移动将货物带出,如果需要转换运行的方向,可以促使横行机构5向下移动与巷道相接触并将直行机构4顶起与巷道相脱离,此时通过横向机构可以带动车体1换向移动,有利于对货物进行换向的输送。
如图3-9所示,直行机构4包括安装在钣金外壳3内的行走电机6,在钣金外壳3的前后两端均转动设置有直行轴10,直行轴10的两端均固定连接有直行轮11,同时在钣金外壳3上还转动设置有直行驱动轴16,在行走电机6的一个输出端与直行驱动轴16之间、直行驱动轴16与直行轴10之间均通过链轮与链条9配合的方式进行传动,从而使得通过行走电机6的一个输出端可以带动直行轮11转动,进而促使车体1在巷道上做直线移动。
横行机构5包括设置于支撑立板8上的横行轮13,而行走电机6的另一个输出端通过换向齿轮组传动连接有横行驱动轴12,横行驱动轴12通过联轴器与传动轴和支撑立板8上的横行轮13相连接,从而使得行走电机6的另一个输出端可以带动横行轮13转动,从而促使车体1能够横向移动。
在钣金外壳3内还设置有驱动电机7,同时在钣金外壳3的左右两侧均设置有丝杠14,丝杠14与钣金外壳3上的基座转动连接,驱动电机7的输出轴和丝杠14之间通过同步带15与同步带15轮的传动方向相连接,使得驱动电机7可以带动丝杠14转动。
进一步地,在钣金外壳3内位于丝杠14的底端固定安装有滑轨22,而丝杠14上螺纹配合有轮螺母18,轮螺母18的底端固定连接有滑块23,滑块23与滑轨22滑动连接,通过滑轨22可以对滑块23和轮螺母18进行限位,从而使得丝杠14转动可以带动轮螺母18 沿着丝杠14往复移动。
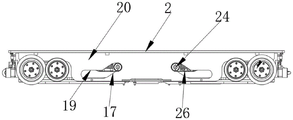
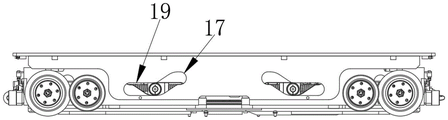
而顶升立板20上设置有凸轮轮廓21,凸轮轮廓21上包括相互接通的第一顶升部17和第一保持部19,第一顶升部17为弧形段,而第一保持部19为直线段,在轮螺母18的外侧固定连接有连接轴,连接上套设有滚动轴承24,滚动轴承24设置于凸轮轮廓21内部。
实际使用时,通过驱动电机7带动同步带15转动,从而带动丝杠14转动,丝杠14 可以带动轮螺母18和其一侧的滚动轴承24在凸轮轮廓21内部移动,当滚动轴承24从第一保持部19移动到第一顶升部17处时,通过凸轮轮廓21对滚动轴承24的限位可以带动顶升立板20和其顶部的顶升板2向下移动,从而保持顶升板2的初始状态,此时顶升板2 处于非载重状态,而当丝杠14带动滚动轴承24从第一顶部部移动到第一保持部19处时,可以将顶升板2向上顶起,并且此时滚动轴承24处于水平段的第一保持部19处,可以提高对顶升立板20和顶升板2支撑的稳定性,当顶升板2被向上顶起时处于载重状态,可以将货物向上顶起,从而对货物进行运输,此装置通过滚动轴承24与顶升立板20上的凸轮轮廓21相配合可以快速完成对顶升板2的顶起动作,由于采用的机械结构简单紧凑,因此稳定性高,除此之外,此装置占用车体1的空间小,使得车体1整体的体积较小,从而有利于提高巷道的利用率。
而在支撑立板8的侧面上开设有反向凸轮轮廓27,反向凸轮轮廓27包括第二顶升部 25和第二保持部26,并且第二顶升部25与第一顶升部17相对,第二保持部26与第一保持部19相对,除此之外,第二顶升部25与第一顶升部17的走向相反。
与滚动轴承24带动顶升板2向上移动的原理相似,位于轮螺母18内侧的滚动轴承24 设置于反向凸轮轮廓27内部,当丝杆带动滚动轴承24从第二保持部26移动到第二顶升部25时,可以带动支撑立板8向上移动,通过支撑立板8可以带动其上的横行轮13向下移动并与巷道相接触,并且随着横行轮13的不断向下移动可以将直行轮11向上顶起,此时通过行走电机6可以带动横行轮13在巷道上移动,从而促使车体1横向移动,有利于改变车体1的移动方向,而当滚动轴承24从第二顶升部25移动到第二保持部26时可以带动支撑立板8向上移动,从而使得支撑立板8上的横行轮13与巷道相脱离,从而使得直行轮11与巷道接触,车体1可以直行。
作为本方案的第一实施例,如图7所示,此时横行轮13和顶升板2均处于初始状态,车体1可以在巷道上直线运动,具体地,此时轮螺母18前后两侧的滚动轴承24分别置于顶升立板20上的第一顶升部17和支撑立板8上的第二保持部26,当车体1移动到货物的底部时,通过驱动电机7带动丝杠14转动,从而带动支撑轴承移动;
本方案的第二实施例,此时丝杠14带动支撑轴承在第一顶升部17和第二保持部26内移动,具体地,当支撑滚轮在第一顶升部17移动时,可以带动顶升立板20和顶升板2 向上移动,从而将货物向上顶起使其置于顶升板2的顶部,而此时支撑轴承在第二保持部 26内移动,在进入到第二顶升部25之前,支撑篱笆均处于静止状态,此时横行轮13不与巷道接触,使得车体1处于直行状态。
作为本方案的第三实施例,如果需要车体1横向移动,可以通过丝杠14转动带动支撑轴承移动,此时支撑轴承将从第一顶升部17移动到第一保持部19内,从而保持顶升板 2的顶起状态,从而对货物稳定支撑,同时,支撑轴承将从第二保持部26内动到第二顶升部25处,从而带动支撑立板8向下移动,使得支撑立板8上的横行轮13与巷道相接触并将直行轮11顶起,从而使得车体1能够横向移动,进而对货物进行横向运输。
综上所述,此装置通过支撑轴承与顶升立板20、支撑立板8的配合,可以迅速将货物顶起,并且快速选择车体1的横向移动和直行运动,从而提高了对货物运输的效率,与此同时,占用巷道的空间较小,从而提高了对巷道的利用率。
工作原理:此装置可多向行驶,跨巷道作业,配合配套提升设备,也可跨层作业,更加高效、灵活,不受空间限制,充分利用空间,利用丝杠14轮螺母18机构与凸轮轮廓21 的配合运行,实现小车的顶升、换向功能的方式,代替了连杆结构或液压顶杆机构,降低了自重及车体1高度,简化了车体1内部结构,杜绝了液体渗漏等问题,同时获得了更高的载重能力。
此外本方案实行单电机双驱动,直行机构4与横行机构5两个方向的动力,只用了一个行走电机6,简化了车体1内部结构,降低了制造成本,有利于节能减排。
Claims (9)
1.一种基于内制凸轮轮廓控制的四向穿梭车,包括车体(1),所述车体(1)包括钣金外壳(3),所述钣金外壳(3)上设置有直行机构(4),其特征在于:所述钣金外壳(3)的内侧设置有支撑立板(8),所述支撑立板(8)和钣金外壳(3)之间设置有顶升组件;
所述顶升组件包括固定连接的顶升板(2)和顶升立板(20),所述顶升立板(20)设置于顶升板(2)的底部并置于钣金外壳(3)和支撑立板(8)之间,所述支撑立板(8)和顶升立板(20)均与钣金外壳(3)滑动连接,所述支撑立板(8)上设置有横行机构(5),当顶升板(2)将货物顶起时,车体(1)通过选择直行机构(4)或者横行机构(5)促使其在巷道内直行或者横行。
2.根据权利要求1所述的一种基于内制凸轮轮廓控制的四向穿梭车,其特征在于:所述直行机构(4)包括安装在钣金外壳(3)内的行走电机(6),所述钣金外壳(3)的两侧均设置有与行走电机(6)传动连接的直行轮(11)。
3.根据权利要求2所述的一种基于内制凸轮轮廓控制的四向穿梭车,其特征在于:所述横行机构(5)包括设置于支撑立板(8)上的横行轮(13),所述行走电机(6)的另一个输出端与横行轮(13)传动连接。
4.根据权利要求1所述的一种基于内制凸轮轮廓控制的四向穿梭车,其特征在于:所述钣金外壳(3)内安装有驱动电机(7),所述钣金外壳(3)的左右两侧均设置有丝杠(14),所述驱动电机(7)与丝杠(14)传动连接,所述钣金外壳(3)内位于丝杠(14)的底端固定安装有滑轨(22),所述丝杠(14)上螺纹配合有轮螺母(18),所述轮螺母(18)的底端固定连接有滑块(23),所述滑块(23)与滑轨(22)滑动连接,所述轮螺母(18)的内外两侧均通过连接轴转动设置有滚动轴承(24)。
5.根据权利要求4所述的一种基于内制凸轮轮廓控制的四向穿梭车,其特征在于:所述顶升立板(20)上设置有凸轮轮廓(21),凸轮轮廓(21)上包括相互接通的第一顶升部(17)和第一保持部(19),第一顶升部(17)为弧形段,而第一保持部(19)为直线段。
6.根据权利要求5所述的一种基于内制凸轮轮廓控制的四向穿梭车,其特征在于:所述支撑立板(8)的侧面上开设有反向凸轮轮廓(27),所述反向凸轮轮廓(27)包括第二顶升部(25)和第二保持部(26),并且第二顶升部(25)与第一顶升部(17)相对,第二保持部(26)与第一保持部(19)相对,所述第二顶升部(25)与第一顶升部(17)的走向相反。
7.根据权利要求2所述的一种基于内制凸轮轮廓控制的四向穿梭车,其特征在于:所述钣金外壳(3)的前后两端均转动设置有直行轴(10),直行轮(11)安装于直行轴(10)的两端,所述钣金外壳(3)上转动设置有直行驱动轴(16),行走电机(6)的一个输出端与直行驱动轴(16)之间、直行驱动轴(16)与直行轴(10)之间均通过链轮与链条(9)配合的方式进行传动。
8.根据权利要求7所述的一种基于内制凸轮轮廓控制的四向穿梭车,其特征在于:所述行走电机(6)的另一个输出端通过换向齿轮组传动连接有横行驱动轴(12),所述横行驱动轴(12)通过联轴器与传动轴和支撑立板(8)上的横行轮(13)相连接。
9.根据权利要求4所述的一种基于内制凸轮轮廓控制的四向穿梭车,其特征在于:所述钣金外壳(3)内安装有基座,所述丝杠(14)与基座转动连接。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210407240.8A CN114751125A (zh) | 2022-04-18 | 2022-04-18 | 一种基于内制凸轮轮廓控制的四向穿梭车 |
| CN202211107642.2A CN115180332B (zh) | 2022-04-18 | 2022-09-13 | 一种四向穿梭车及其使用方法 |
| CN202310417812.5A CN116354015A (zh) | 2022-04-18 | 2023-04-18 | 一种四向穿梭车运载系统和四向穿梭车的使用方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202210407240.8A CN114751125A (zh) | 2022-04-18 | 2022-04-18 | 一种基于内制凸轮轮廓控制的四向穿梭车 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN114751125A true CN114751125A (zh) | 2022-07-15 |
Family
ID=82331007
Family Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202210407240.8A Pending CN114751125A (zh) | 2022-04-18 | 2022-04-18 | 一种基于内制凸轮轮廓控制的四向穿梭车 |
| CN202211107642.2A Active CN115180332B (zh) | 2022-04-18 | 2022-09-13 | 一种四向穿梭车及其使用方法 |
| CN202310417812.5A Pending CN116354015A (zh) | 2022-04-18 | 2023-04-18 | 一种四向穿梭车运载系统和四向穿梭车的使用方法 |
Family Applications After (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN202211107642.2A Active CN115180332B (zh) | 2022-04-18 | 2022-09-13 | 一种四向穿梭车及其使用方法 |
| CN202310417812.5A Pending CN116354015A (zh) | 2022-04-18 | 2023-04-18 | 一种四向穿梭车运载系统和四向穿梭车的使用方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (3) | CN114751125A (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116767737B (zh) * | 2023-08-17 | 2023-11-17 | 青岛盈智科技有限公司 | 一种穿梭车行走定位控制方法及系统 |
| CN117361042B (zh) * | 2023-10-30 | 2024-04-02 | 中国人民解放军陆军工程大学 | 一种城市地下物资运输系统及其工作方法 |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5221174A (en) * | 1991-10-18 | 1993-06-22 | Valley Fabrication, Inc. | Field shuttle with end mounted lift |
| JP3010046B1 (ja) * | 1999-02-19 | 2000-02-14 | 株式会社文祥堂 | 二層式移動棚装置 |
| CN106285125B (zh) * | 2016-09-22 | 2019-04-16 | 深圳精智机器有限公司 | 车辆搬运器 |
| CN109322518A (zh) * | 2017-07-31 | 2019-02-12 | 尹传锋 | 纵横机器人、智能立体、存取方法及智能立体车库的app应用 |
| CN109607014B (zh) * | 2018-12-27 | 2024-03-15 | 湖北科德智能装备有限公司 | 一种车轮调节装置及其四向搬运车 |
| CN210764160U (zh) * | 2019-08-13 | 2020-06-16 | 上海永乾机电有限公司 | 紧凑型升降组合货叉 |
| CN212221318U (zh) * | 2019-11-02 | 2020-12-25 | 王燏斌 | 一种带有阻挡器的仓储装置 |
| CN111646088A (zh) * | 2020-06-30 | 2020-09-11 | 太原福莱瑞达物流设备科技有限公司 | 重型四向穿梭车 |
| CN111762717A (zh) * | 2020-07-03 | 2020-10-13 | 隆链智能科技(上海)有限公司 | 内斜抽拉顶升滑块机构及具有该顶升机构的机械搬运设备 |
| CN112079030B (zh) * | 2020-09-15 | 2021-06-18 | 隆链智能科技(上海)有限公司 | 一种横向电磁联动式十六轮四向穿梭车 |
| CN112079031B (zh) * | 2020-09-15 | 2021-04-06 | 隆链智能科技(上海)有限公司 | 一种斜拉顶升换向式十六轮四向穿梭车 |
| CN112093349B (zh) * | 2020-09-15 | 2022-01-18 | 隆链智能科技(上海)有限公司 | 一种顶升联动式十六轮四向穿梭车 |
| CN215099819U (zh) * | 2021-04-27 | 2021-12-10 | 索尔(天津)智能科技有限公司 | 一种智能仓储用四向车的顶托板举升机构 |
| CN113292015A (zh) * | 2021-06-26 | 2021-08-24 | 太原福莱瑞达物流设备科技有限公司 | 一种重载轻薄四向穿梭车 |
| CN216271577U (zh) * | 2021-08-25 | 2022-04-12 | 湖州诺川科技有限公司 | 一种双层进出入库辊道机 |
| CN114180251A (zh) * | 2021-12-31 | 2022-03-15 | 陕西科技大学 | 一种四向穿梭车 |
-
2022
- 2022-04-18 CN CN202210407240.8A patent/CN114751125A/zh active Pending
- 2022-09-13 CN CN202211107642.2A patent/CN115180332B/zh active Active
-
2023
- 2023-04-18 CN CN202310417812.5A patent/CN116354015A/zh active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| CN115180332A (zh) | 2022-10-14 |
| CN115180332B (zh) | 2023-04-25 |
| CN116354015A (zh) | 2023-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114751125A (zh) | 一种基于内制凸轮轮廓控制的四向穿梭车 | |
| CN111646088A (zh) | 重型四向穿梭车 | |
| CN112079030B (zh) | 一种横向电磁联动式十六轮四向穿梭车 | |
| CN112079031B (zh) | 一种斜拉顶升换向式十六轮四向穿梭车 | |
| CN112093349B (zh) | 一种顶升联动式十六轮四向穿梭车 | |
| CN104773494A (zh) | 换轨穿梭车 | |
| CN101424133B (zh) | 立体车库停车层用转运小车 | |
| CN113135375A (zh) | 一种新型四向穿梭车 | |
| CN112027462A (zh) | 一种纵向电磁联动式十六轮四向穿梭车 | |
| CN115520557A (zh) | 一种丝杆凸轮联动升降式超薄四向穿梭车 | |
| CN104612444A (zh) | 一种多功能泊车机器人 | |
| CN216889971U (zh) | 一种重载轻薄四向穿梭车 | |
| CN212374153U (zh) | 一种重型四向穿梭车 | |
| CN215515238U (zh) | 一种联动式十六轮四向穿梭车 | |
| CN110451144A (zh) | 一种顶升和换向一体式的搬运设备 | |
| CN215665299U (zh) | 单电机驱动的四向穿梭板 | |
| CN113292015A (zh) | 一种重载轻薄四向穿梭车 | |
| CN214987889U (zh) | 一种重载四向穿梭车 | |
| CN215363151U (zh) | 一种单动力十六轮四向穿梭车 | |
| CN112173528A (zh) | 一种紧凑型四向穿梭车用的换向机构 | |
| CN113428544A (zh) | 一种单动力斜拉顶升十六轮四向穿梭车 | |
| CN115158946B (zh) | 联动顶升与换向的四向穿梭车 | |
| CN218231756U (zh) | 穿梭车用顶升换向装置及应用该装置的重载四向穿梭车 | |
| CN215477483U (zh) | 一种新型穿梭车 | |
| CN112299304A (zh) | 一种穿梭车 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| WD01 | Invention patent application deemed withdrawn after publication |
Application publication date: 20220715 |
|
| WD01 | Invention patent application deemed withdrawn after publication |