CN112753054A - 磁性标识器系统 - Google Patents
磁性标识器系统 Download PDFInfo
- Publication number
- CN112753054A CN112753054A CN201980062795.XA CN201980062795A CN112753054A CN 112753054 A CN112753054 A CN 112753054A CN 201980062795 A CN201980062795 A CN 201980062795A CN 112753054 A CN112753054 A CN 112753054A
- Authority
- CN
- China
- Prior art keywords
- magnetic
- magnetic marker
- road
- sensor output
- markers
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 239000003550 marker Substances 0.000 title claims abstract description 141
- 230000005389 magnetism Effects 0.000 claims description 5
- 238000009434 installation Methods 0.000 claims 2
- 238000001514 detection method Methods 0.000 abstract description 11
- 239000011295 pitch Substances 0.000 description 76
- 238000010586 diagram Methods 0.000 description 13
- 230000004907 flux Effects 0.000 description 12
- 230000035945 sensitivity Effects 0.000 description 10
- 238000004088 simulation Methods 0.000 description 9
- 230000007423 decrease Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 7
- 238000012545 processing Methods 0.000 description 7
- 238000012360 testing method Methods 0.000 description 6
- 239000011347 resin Substances 0.000 description 5
- 229920005989 resin Polymers 0.000 description 5
- 230000000694 effects Effects 0.000 description 4
- 229910000859 α-Fe Inorganic materials 0.000 description 4
- 238000013459 approach Methods 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 238000000034 method Methods 0.000 description 3
- 238000005070 sampling Methods 0.000 description 3
- UQSXHKLRYXJYBZ-UHFFFAOYSA-N Iron oxide Chemical compound [Fe]=O UQSXHKLRYXJYBZ-UHFFFAOYSA-N 0.000 description 2
- 229910052779 Neodymium Inorganic materials 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 2
- 230000001070 adhesive effect Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 238000002474 experimental method Methods 0.000 description 2
- QEFYFXOXNSNQGX-UHFFFAOYSA-N neodymium atom Chemical compound [Nd] QEFYFXOXNSNQGX-UHFFFAOYSA-N 0.000 description 2
- 239000013598 vector Substances 0.000 description 2
- 229910019230 CoFeSiB Inorganic materials 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 229910045601 alloy Inorganic materials 0.000 description 1
- 239000000956 alloy Substances 0.000 description 1
- 230000003321 amplification Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 238000005094 computer simulation Methods 0.000 description 1
- 238000005260 corrosion Methods 0.000 description 1
- 230000007797 corrosion Effects 0.000 description 1
- 238000001739 density measurement Methods 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 239000000284 extract Substances 0.000 description 1
- 239000003365 glass fiber Substances 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000006247 magnetic powder Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000000203 mixture Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000000465 moulding Methods 0.000 description 1
- 238000003199 nucleic acid amplification method Methods 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 239000004033 plastic Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- 239000002904 solvent Substances 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images





















Classifications
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01F—ADDITIONAL WORK, SUCH AS EQUIPPING ROADS OR THE CONSTRUCTION OF PLATFORMS, HELICOPTER LANDING STAGES, SIGNS, SNOW FENCES, OR THE LIKE
- E01F9/00—Arrangement of road signs or traffic signals; Arrangements for enforcing caution
- E01F9/30—Arrangements interacting with transmitters or receivers otherwise than by visible means, e.g. using radar reflectors or radio transmitters
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01F—ADDITIONAL WORK, SUCH AS EQUIPPING ROADS OR THE CONSTRUCTION OF PLATFORMS, HELICOPTER LANDING STAGES, SIGNS, SNOW FENCES, OR THE LIKE
- E01F11/00—Road engineering aspects of Embedding pads or other sensitive devices in paving or other road surfaces, e.g. traffic detectors, vehicle-operated pressure-sensitive actuators, devices for monitoring atmospheric or road conditions
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W60/00—Drive control systems specially adapted for autonomous road vehicles
- B60W60/001—Planning or execution of driving tasks
-
- E—FIXED CONSTRUCTIONS
- E01—CONSTRUCTION OF ROADS, RAILWAYS, OR BRIDGES
- E01F—ADDITIONAL WORK, SUCH AS EQUIPPING ROADS OR THE CONSTRUCTION OF PLATFORMS, HELICOPTER LANDING STAGES, SIGNS, SNOW FENCES, OR THE LIKE
- E01F9/00—Arrangement of road signs or traffic signals; Arrangements for enforcing caution
- E01F9/50—Road surface markings; Kerbs or road edgings, specially adapted for alerting road users
- E01F9/506—Road surface markings; Kerbs or road edgings, specially adapted for alerting road users characterised by the road surface marking material, e.g. comprising additives for improving friction or reflectivity; Methods of forming, installing or applying markings in, on or to road surfaces
- E01F9/512—Preformed road surface markings, e.g. of sheet material; Methods of applying preformed markings
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0259—Control of position or course in two dimensions specially adapted to land vehicles using magnetic or electromagnetic means
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0259—Control of position or course in two dimensions specially adapted to land vehicles using magnetic or electromagnetic means
- G05D1/0261—Control of position or course in two dimensions specially adapted to land vehicles using magnetic or electromagnetic means using magnetic plots
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/01—Detecting movement of traffic to be counted or controlled
- G08G1/042—Detecting movement of traffic to be counted or controlled using inductive or magnetic detectors
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/50—Magnetic or electromagnetic sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
Abstract
在为了实现用于进行驾驶者对车辆的驾驶操作的辅助、或者不依赖于驾驶者的操作的自动驾驶的车辆控制的磁性标识器系统(1)中,磁性标识器(10)铺设成沿着道路使磁极的朝向交替反转,并且配置成使沿着道路空出间隙地相邻的磁性标识器(10)的磁场互相干扰,由此,可在抑制磁性标识器(10)本身的磁力的同时提高车辆侧的磁性标识器(10)的检测可靠性。
Description
技术领域
本发明涉及包含铺设于道路使得能在行驶于道路的车辆侧检测的磁性标识器的磁性标识器系统。
背景技术
以往,已知利用铺设于道路的磁性标识器的车辆用的磁性标识器检测系统(例如,参照专利文献1)。这样的磁性标识器检测系统以具备磁传感器的车辆为对象,其目的在于,提供利用磁性标识器的自动转向控制、车道脱离警报等各种驾驶辅助。
在先技术文献
专利文献
专利文献1:JP特开2005-202478号公报
发明内容
发明想要解决的课题
但是,在所述以往的车辆用的磁性标识器检测系统中,存在如下这样的问题。即,由于车辆侧的磁传感器安装于距路面高100~250mm左右的位置,因此需要在某种程度上增强磁性标识器的磁力,另一方面,若增强磁性标识器的磁力,则担心会吸附例如钉子、螺栓等掉落于路面的金属物而诱发车辆轮胎的爆破等故障。
本发明鉴于所述以往的问题点而完成,其想要提供用于能够在抑制磁性标识器的磁力的同时以高可靠性在车辆侧检测磁性标识器的磁性标识器系统。
用于解决课题的手段
本发明是一种磁性标识器系统,为了实现用于进行驾驶者对车辆的驾驶操作的辅助、或者不依赖于驾驶者的操作的自动驾驶的车辆控制,包含沿着道路铺设以使得能在车辆侧的磁传感器进行检测的磁性标识器,在该磁性标识器系统中,所述磁性标识器铺设成沿着道路使磁极的朝向交替反转,并且配置成使得沿着道路空出间隙地相邻的磁性标识器的磁场互相干扰。
发明效果
在本发明的磁性标识器系统中,铺设磁性标识器以使得沿着道路使磁极的朝向交替反转。进而,该磁性标识器系统中的磁性标识器配置成使得沿着道路空出间隙地相邻的磁性标识器的磁场互相干扰。
在本发明的磁性标识器系统中,利用相邻的磁性标识器的磁场的干扰来增强作用于车辆侧的磁场。只要能够利用磁场的干扰来增强作用于车辆侧的磁场,就能够相对于为了进行磁性标识器的检测而在车辆侧要求的磁场的强度,相对地抑制磁性标识器表面的磁力的强度。
如以上所述,本发明的磁性标识器系统是具有能够在抑制磁性标识器的磁力的同时以高可靠性在车辆侧检测磁性标识器这样的优异特性的系统。
附图说明
图1是表示实施例1中由车辆对磁性标识器进行检测的情形的说明图。
图2是表示实施例1中磁性标识器系统的说明图。
图3是表示实施例1中磁性标识器的图。
图4是表示实施例1中磁性标识器的铅垂方向的磁场分布的曲线图。
图5是表示实施例1中磁传感器的电结构的框图。
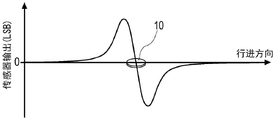
图6是实施例1中通过磁性标识器时的传感器输出的变化的说明图。
图7是实施例1中磁性标识器的配置间距以及间隙G的说明图。
图8是实施例1中磁性标识器的铺设规格的说明图。
图9是表示实施例1中磁传感器的安装高度与传感器输出(p-p)的关系的曲线图。
图10a是表示实施例1中在磁性标识器的配置间距=100cm时车辆的行进方向上的传感器输出的变化的曲线图。
图10b是表示实施例1中在磁性标识器的配置间距=50cm时车辆的行进方向上的传感器输出的变化的曲线图。
图10c是表示实施例1中在磁性标识器的配置间距=30cm时车辆的行进方向上的传感器输出的变化的曲线图。
图10d是表示实施例1中在磁性标识器的配置间距=20cm时车辆的行进方向上的传感器输出的变化的曲线图。
图10e是表示实施例1中在磁性标识器的配置间距=10cm时车辆的行进方向上的传感器输出的变化的曲线图。
图11是表示实施例1中磁性标识器的配置间距与传感器输出(p-p)的关系的曲线图。
图12a是实施例1中磁性标识器所单独形成的磁场的说明图。
图12b是实施例1中在配置间距=10cm时磁性标识器所形成的磁场的说明图。
图12c是实施例1中在配置间距=20cm时磁性标识器所形成的磁场的说明图。
图13a是表示实施例2中构成传感器输出波形的数据序列的图。
图13b是表示实施例2中构成正弦波形的数据序列的图。
图14a是表示实施例2中磁性标识器的配置间距与相关系数的关系的曲线图。
图14b是表示实施例2中高相关范围的传感器输出(p-p)的说明图。
具体实施方式
关于本发明的实施方式,使用以下的实施例来具体进行说明。
(实施例1)
本例是包含沿着道路铺设从而能够在车辆5侧进行检测的磁性标识器10的磁性标识器系统1的示例。关于该内容,使用图1~图12进行说明。
图1以及图2的磁性标识器10例如沿着车辆5行驶的车道530的中央铺设。这样铺设于路面53的磁性标识器10例如能够由安装于形成车辆5的底面的车体地板50的磁传感器2进行检测。磁传感器2对磁性标识器10的检测信号例如被输入到车辆5侧的未图示的ECU等,能够利用于车道维持用的自动转向控制、车道脱离警报等驾驶辅助控制、自动行驶控制等车辆5侧的各种控制中。
磁性标识器10如图3所示那样是直径100mm且最大厚度约2.0mm的扁平的圆形形状的标识器。磁性标识器10包含直径100mm且厚度1.0mm的扁平的磁铁片11。在磁性标识器10中,磁铁片11的表背两面侧由厚度0.5mm的树脂模12覆盖。磁铁片11是在氧化铁的磁性粉末中混合橡胶并进行成形而得的各向同性铁素体橡胶磁铁的片。该磁铁片11的最大磁能积(BHmax)是6.4kJ/立方m。
在磁性标识器10中,表背两面当中的一个面成为N极的面,另一个面成为S极的面。该磁性标识器10的表背没有区别,能够择一地采用将N极设为上表面的铺设形式以及将S极设为上表面的铺设形式中的任一种(参照图2)。
磁性标识器10向路面53的施工例如通过基于粘接材料的粘接固定来实施。另外,可以在磁性标识器10的外周侧面也施加树脂模。此外,形成路面53的一部分的磁铁片11的表面侧的树脂模12可以是用玻璃纤维强化而得的树脂模。
这里,表1示出本例的磁性标识器10所具备的磁铁片11的形状规格、磁性规格的一部分。
[表1]
| 磁铁种类 | 铁素体橡胶磁铁 |
| 外径 | φ100mm |
| 厚度 | 1.0mm(树脂模除外) |
| 表面磁通量密度Gs | 1mT |
磁性标识器10在铅垂方向上作用的磁场分布如图4那样。图4是示出基于使用有限要素法的轴对称三维静磁场分析的模拟结果的半对数曲线图。另外,当执行该计算机模拟时,使用通过实证实验预先对模拟的精度确认完毕的模拟程序。进而,关于图4所示的数据当中的一部分,通过实证实验来确认值。
图4是将在铅垂方向上作用的磁的磁通量密度的对数刻度设定为纵轴且将以磁性标识器10的表面为基准的铅垂方向的高度(距标识器表面的高度)设定为横轴的图。在图4中,距标识器表面的高度=0mm时的磁通量密度成为表1中的“表面磁通量密度Gs”。在该磁性标识器10中,在设想为磁传感器2的安装高度(以下称为传感器高度)的范围100~250mm中,确保了8微特斯拉以上的磁通量密度。
磁传感器2如图5的框图那样是将MI元件21和驱动电路一体化而成的1芯片的MI(Magneto Impedance,磁阻抗)传感器。MI元件21是包含CoFeSiB系合金制的大致零磁应变的非晶丝(磁敏体的一例)211和卷绕于该非晶丝211的周围的拾波线圈213的元件。磁传感器2通过测量对非晶丝211施加脉冲电流时在拾波线圈213产生的电压,来检测作用于作为磁敏体的非晶丝211的磁。
驱动电路构成为包含:向非晶丝211供给脉冲电流的脉冲电路23;和在给定定时对拾波线圈213中产生的电压进行采样并输出的信号处理电路25。脉冲电路23是包含生成成为脉冲电流的本源的脉冲信号的脉冲发生器231的电路。信号处理电路25是经由与脉冲信号联动而开关的同步检波251来取出拾波线圈213的感应电压并通过放大器253以给定的放大率进行放大的电路。将由该信号处理电路25放大的信号作为传感器信号输出到外部。
表2示出该磁传感器2的规格的一部分。
[表2]
| 测定范围 | ±0.6mT |
| 磁通量分辨率 | 0.02μT |
| 采样周期 | 3kHz |
磁传感器2是磁通量密度的测定范围为±0.6毫特斯拉且测定范围内的磁通量分辨率为0.02微特斯拉这样的高灵敏度的传感器。这样的高灵敏度通过利用了非晶丝211的阻抗对应于外部磁场而敏感地发生变化这样的MI效应的MI元件21来实现。这里,如上所述,磁性标识器10对作为传感器高度的设想范围的高度100~250mm的位置作用至少磁通量密度8微特斯拉(参照图4)的磁。根据磁通量分辨率为0.02微特斯拉(参照表2)的磁传感器2,能够以高可靠性检测该磁性标识器10。
磁传感器2在非晶丝211的长边方向上具有灵敏度。在本例的结构中,将磁传感器2载于车上,以使非晶丝211的长边方向沿着车辆5的前后方向。该磁传感器2在车辆5的行进方向上具有灵敏度,能够测量作用于该方向的磁场的分量。另外,本例的磁传感器2构成为在车辆5接近于N极的磁性标识器10时,输出(以下称为传感器输出)成为正值。
作用于磁传感器2的磁场当中沿着车辆5的行进方向的分量在磁性标识器10的近前的位置和通过磁性标识器10后的位置上作用的方向发生反转。并且,在磁性标识器10的正上方的位置,作用于磁传感器2的磁场当中沿着车辆5的行进方向的分量的大小成为零。例如,在车辆5通过N极的磁性标识器10时,如图6所示那样,在正值的传感器输出逐渐变大而成为极大值后,在磁性标识器10的正上方的位置的近前转变为减少而逐渐变小。并且,在传感器输出在磁性标识器10的正上方的位置成为零后,随着从磁性标识器10离开,负值的传感器输出逐渐向负侧变大而成为极小值。之后,随着进一步从磁性标识器10离开,负值的传感器输出向零接近。这样,车辆5通过磁性标识器10时的传感器输出的波形(以下称为传感器输出波形)在磁性标识器10的正上方的位置呈现出零交叉,并且成为以该零交叉为基准形成点对称的关系的正负的峰的波形。另外,在图6的曲线图中,在横轴上规定车辆5的行进方向的位置,在纵轴上规定传感器输出。图6中的传感器输出的单位成为将传感器输出数字化时的最低有效位(LSB)。本例的图中的传感器输出或者传感器输出(p-p)的单位全部成为该最低有效位(LSB)。
在本例的磁性标识器系统1中,如图7所示那样,沿着道路以20cm的配置间距来配置磁性标识器10。磁性标识器10是直径100mm(10cm),因此沿着道路相邻的两个磁性标识器10的间隙(间隔:gap)G成为10cm。进而,在本例的结构中,交替地配置上表面为N极的磁性标识器10和上表面为S极的磁性标识器10,以使沿着道路使磁极的朝向交替反转,使磁性标识器10的磁极性交替地切换。在本例中,如此地,通过将磁性标识器10的配置间距设定得比较窄,并且交替地切换磁性标识器10的磁极性,来提高作用于磁传感器2的磁场的强度(磁的大小)。
接下来,参照图8以及图9来说明能够通过上述那样的磁性标识器10的铺设形式来提高作用于磁传感器2的磁场的强度的主旨。图8示出四种铺设规格。图9针对各铺设规格例示出传感器高度(横轴)与传感器输出(p-p)(纵轴)的关系。另外,传感器输出(p-p)表示传感器输出波形的peak-to-peak(振幅)。
图8的四种铺设规格如以下所述。
(第一铺设规格)沿着道路每20cm配置磁性标识器10使得磁性标识器10的磁极性交替切换的本例的铺设规格。如上所述,磁性标识器10是直径10cm,因此沿着道路相邻的两个磁性标识器10的间隙G的长度成为10cm(参照图7)。
(第二铺设规格)不切换磁性标识器10的磁极性地沿着道路每20cm配置S极的磁性标识器10的铺设规格。
(第三铺设规格)沿着道路每10cm配置磁性标识器10使得磁性标识器10的磁极性交替切换的铺设规格。磁性标识器10是直径10cm,因此沿着道路相邻的两个磁性标识器10成为没有间隙地外切的状态。
(第四铺设规格)将相邻的磁性标识器10充分分离地配置且各磁性标识器10在磁性上孤立的铺设规格。
根据图9,上述的第一铺设规格时的传感器输出(p-p)成为最大。特别地,在属于设想为传感器高度的100mm~250mm的150mm、200mm、250mm的各传感器高度中,与其他铺设规格相比,第一铺设规格的情况下的传感器输出变大的倾向很显著。
如此地,在第一铺设规格中,相比磁性标识器10在磁性上孤立的第四铺设规格,存在传感器输出变大的倾向。另一方面,在磁极性不交替切换的第二铺设规格中,在上述的四种铺设规格之中,传感器输出成为最小。此外,虽有磁极性的切换但无间隙地将磁性标识器10排列而得的第三铺设规格与磁性标识器10在磁性上孤立的第四铺设规格相比,也是传感器输出变小。
发明者们考察到,相邻的磁性标识器10的磁场发生干扰而出现上述那样的传感器输出的大与小。进而,发明者们针对磁性标识器10的磁极性有交替的切换的第一以及第三铺设规格考察到,因配置间距的差异会出现传感器输出的大与小。更详细来说,发明者们考察到,在配置间距为20cm的情况下,由于相邻的磁性标识器10的磁场的干扰,作用于磁传感器2的磁场变强,传感器输出变大。进而,发明者们考察到,在配置间距为10cm的情况下,由于相邻的磁性标识器10的磁场的干扰,作用于磁传感器2的磁场变弱,传感器输出变小。
发明者们为了调查相邻的磁性标识器10的磁场的相互的干扰程度与传感器输出的大小的关系,而实施了传感器输出的模拟试验。该模拟试验是磁传感器2(传感器高度200mm)沿着排列有磁性标识器10的铺设线通过的情况下的传感器输出的模拟。模拟试验的结果如以下说明的图10a~e以及图11那样。
在模拟试验中,首先,利用上述的模拟程序,求取由磁性标识器10形成的磁场分布。图10a~e的各图是在传感器高度=200mm下磁传感器2沿着上述铺设线在该磁场分布中移动时预测的传感器输出波形的模拟的结果。
图10a~e的各图都与磁极性沿着道路交替切换的磁性标识器10的铺设规格对应。另一方面,磁性标识器10的配置间距在图10a~e的每个图中都不同。图10a的配置间距为100cm,图10b的配置间距为50cm,图10c的配置间距为30cm,图10d的配置间距为20cm,图10e的配置间距为10cm。
在图10a的配置间距100cm的情况下,相邻的磁性标识器10的间隙G为90cm。在该情况下,各磁性标识器10接近于磁性孤立的状态,能够预想到各磁性标识器10的磁场的干扰的程度小到能够忽视的程度。另一方面,在图10e的配置间距10cm的情况下,相邻的磁性标识器10成为外切的状态,能够预想到磁场的干扰的程度变得最高。
在图10a的配置间距100cm的情况下的传感器输出波形中,各磁性标识器10的磁场几乎不发生干扰,各磁性标识器10在磁性上孤立。在该情况下,在车辆5的行进方向上具有灵敏度的磁传感器2通过磁性标识器10时的传感器输出的正负的峰按每个磁性标识器10个别地出现。另外,在构成传感器输出波形的正负的峰当中,零交叉的位置位于磁性标识器10的正上方。
另一方面,在图10e的配置间距10cm的情况下的传感器输出波形中,出现接近于正弦波的传感器输出的波形。在该传感器输出的波形中,每个磁性标识器10的正负的峰相互发生干扰,没有区别地成为一体。另外,在图10e的传感器输出的波形中,也是波形中的各零交叉的位置位于各磁性标识器10的正上方。
在图10b~d的中间的配置间距当中为50cm的配置间距的图10b的传感器输出波形中,相邻的磁性标识器10的正负的峰发生干扰,另一方面,传感器输出波形并不会成为正弦波的波形。另一方面,在30cm、20cm的配置间距的图10c以及图10d中,与10cm的配置间距的情况同样,传感器输出波形成为接近于正弦波的波形。
如此地,在本例的磁性标识器10的情况下,在配置间距为30cm以下的范围中,各磁性标识器10的磁场相互发生干扰而成为一体,传感器输出波形成为接近于正弦波的波形。另一方面,在配置间距为50cm以上的范围中,各磁性标识器10的磁场的相互的干扰不充分,传感器输出波形不会成为一体的正弦波的波形。
图11是表示磁性标识器10的配置间距(横轴)与传感器输出(p-p)的大小(纵轴)的关系的模拟结果。配置间距50cm的情况下的传感器输出(p-p)的大小与配置间距100cm的情况没有显著的不同,另一方面,随着接近于配置间距30cm,传感器输出(p-p)逐渐变大。并且,在配置间距25cm附近,传感器输出(p-p)成为峰值。若配置间距进一步变短,则传感器输出(p-p)再次减少。并且,若配置间距比20cm短,则相比配置间距为50cm或者100cm的情况,传感器输出(p-p)反倒变小。例如配置间距10cm的情况下的传感器输出与配置间距为50cm或者100cm的情况下的传感器输出相比,变得非常小。
发明者们如以下那样考察了出现这样的传感器输出的倾向的理由。即,发明者们考察到,在磁性标识器10的周围形成的磁场的环的大小对应于磁性标识器10的配置间距的长短而变动(图12a~c),由此,出现传感器输出的大与小。这里,图12a~c是示意性表示在磁性标识器10的周边形成的磁场的图。图12a与配置间距100cm对应,图12b与配置间距10cm对应,图12c与配置间距20cm对应。
配置间距10cm时的磁场的环如图12a以及图12b所示那样,比配置间距100cm时的磁场的环小。此外,配置间距20cm时的磁场的环如图12a以及图12c所示那样,比配置间距100cm的磁场的环大。发明者们考察到,在配置间距10cm的情况下,由于磁场的环变小,因而作用于位于比路面53高的位置的磁传感器2的磁场的强度会受损,传感器输出会变小。此外,在配置间距20cm的情况下,由于磁场的环变大,因此作用于位于比路面53高的位置的磁传感器2的磁场会变强,传感器输出会变大。
在本例中,鉴于图10以及图11的结果,作为磁性标识器10的配置间距,设定满足以下的三个条件的配置间距=20cm。
(条件1)以设想为传感器高度的100~250mm的上限高度即Hmax=250mm为基准,配置间距处于2/3Hmax以上且3/2×Hmax以内的范围。
(条件2)以设想为传感器高度的100~250mm的上限高度即Hmax=250mm为基准,相邻的磁性标识器10的间隙G的长度处于1/3×Hmax以上且1×Hmax以内的范围。
(条件3)包含相邻的两个磁性标识器10在内沿着道路排列的磁性标识器10作用于车辆侧的磁场的大小沿着道路呈现正弦波形的分布。这里,作用于车辆侧的磁场的大小的意思是车宽方向的磁场分布的最大值。因此,上述的“沿着道路呈现正弦波形的分布”相当于通过沿着道路排列的磁性标识器10的正上方的磁传感器2的传感器输出波形成为正弦波。
关于上述条件1,不足2/3×Hmax=167mm的配置间距属于图11中的曲线图的峰值的左侧的区域,担心相邻的磁性标识器10过于接近从而传感器输出降低。另一方面,超过3/2×Hmax=375mm的配置间距属于图11中的曲线图的右侧的区域,担心由于相邻的磁性标识器10过于分离从而传感器输出降低。
此外,关于上述条件2,若相邻的磁性标识器10的间隙G的长度不足1/3×Hmax=83mm,则担心相邻的磁性标识器10过于接近从而传感器输出反倒变小。另一方面,若相邻的磁性标识器10的间隙G的长度超过1×Hmax=250mm,则担心因相邻的磁性标识器10过于分离从而传感器输出降低。
进而,关于条件3,在沿着道路排列的磁性标识器10作用于磁传感器2的磁场分布(磁力的大小的分布)从正弦波形背离的情况下,沿着道路排列的各磁性标识器10有可能在磁性上孤立。如此地,在各磁性标识器10孤立的状态下,相邻的两个磁性标识器10的磁场的干扰程度并不充分,担心如图11中的曲线图的右侧的区域那样传感器输出会变小。
如此地,在磁性标识器系统1中,适当地设定磁性标识器10的配置间距以使得相邻且磁极性不同的两个磁性标识器10的磁场相互干扰(参照图7)。在该磁性标识器系统1中,由于相邻的磁性标识器10的磁场的相互干扰,因而磁场的环的大小比磁性标识器10单体的情况更扩大,作用于比路面53高的位置的磁传感器2的磁场变强。
根据本例的磁性标识器系统1,能够在抑制磁性标识器10本身的磁力(例如表面磁通量密度等)的同时,提高作用于安装于车辆5的磁传感器2的磁场的强度。该磁性标识器系统1成为具有能够在抑制磁性标识器10的磁力的同时以高可靠性在车辆5侧检测磁性标识器10这样的优异特性的系统。
另外,在本例中,作为磁性标识器10,例示了片状的磁性标识器,但磁性标识器10的形状的规格并不限定于片状。例如也可以是直径20mm且高度28mm这样的柱状的磁性标识器。关于磁性标识器的上表面形状,并不限于圆形形状,也可以采用三角形形状、矩形形状、五边形以上的多边形形状等。进而,磁性标识器的上表面形状可以是隔着中心或者重心为点对称的形状、或者接近于点对称的形状。磁性标识器的上表面形状可以是外周的至少一部分由曲线形成的形状,也可以是仅由曲线平滑地构成而呈现没有角部的外周形状的形状。
此外,在本例中,作为磁性标识器10,例示了利用铁素体橡胶磁铁的磁性标识器,但关于磁铁的种类,并不限定于本例。可以是铁素体塑料磁铁,也可以是钕等磁铁。进而,在本例中,例示了不具有收纳壳体的磁性标识器10,但也可以是将磁铁收于收纳壳体的磁性标识器。例如在是钕等耐腐蚀性并不充分的磁铁的情况下,需要收纳于气密性或者液密性高的收纳壳体中。
另外,在本例中,作为用于选择性地决定磁性标识器10的配置间距的条件,例示了上述条件1~3这三种条件,并设定了满足所有条件1~3的配置间距。也可以仅采用三种条件当中的任一种或者两种条件。所采用的条件可以是条件1~3当中的任一种条件。其中,关于条件3,担心在仅该条件下,配置间距的下限不确定。因此,例如,可以将能够在相邻的磁性标识器10之间确保间隙G(G>0)等条件组合起来。
在本例中,作为用于选定配置间距的条件,例示了配置间距处于2/3Hmax以上且3/2×Hmax以内的范围的主旨的上述条件1、相邻的磁性标识器10的间隙G的长度处于1/3×Hmax以上且1×Hmax以内的范围的主旨的上述条件2等。作为与配置间距相关的条件,也可以取代上述条件1,而设定是与磁传感器2的安装高度的不足2倍相当的长度的配置间距这样的条件。假设在配置间距为安装高度的2倍以上的情况下,担心相邻的磁性标识器10的磁场的干扰程度变少,无法充分发挥使作用于磁传感器2的磁场增强的效果。
此外,在本例中,作为与相邻的磁性标识器10的间隙G相关的条件,例示了间隙G的长度处于1/3×Hmax以上且1×Hmax以内的范围的主旨的上述条件2。作为成为基准的安装高度,可以取代设想为传感器高度的100~250mm的上限高度即Hmax,而设定中间的安装高度。进而,也可以将台数最多的一般的车种中的磁传感器2的安装高度设定为成为基准的安装高度。
另外,可以在沿着道路排列的磁性标识器10当中的至少一部分安装RF-ID标签。RF-ID标签能够利用为提供供磁性标识器10确定用的信息的信息提供部。只要是具备能够与RF-ID标签进行通信的标签读取组件的车辆,就能够取得由RF-ID标签无线发送的信息。该信息可以是RF-ID标签的识别信息。例如,可以将与该识别信息建立关联来存储磁性标识器10的位置信息的数据库设置于能够通过无线通信从车辆5访问的服务器装置,或者设置于车辆5。在该情况下,在检测到磁性标识器10时,能够利用从RF-ID标签接收到的识别信息来确定磁性标识器10的位置。作为RF-ID标签的发送信息,可以是所对应的磁性标识器10的位置信息其本身。
如此地,在采用在一部分磁性标识器10上安装RF-ID标签并能够确定所对应的磁性标识器10的位置的结构的情况下,可以以确定了位置的磁性标识器10为基准来对磁性标识器10的通过数(检测次数)进行计数。若确定了磁性标识器10的配置间距,则通过在磁性标识器10的通过数上乘以配置间距,就能够高精度地算出以所确定的位置为基准的移动距离。
在本例中,例示了在车辆5的前后方向(行进方向)上具有灵敏度的磁传感器2,但也可以是在车宽方向上具有灵敏度的磁传感器,还可以是在铅垂方向上具有灵敏度的磁传感器。进而,例如可以采用在车宽方向和行进方向这两个轴方向、行进方向和铅垂方向这两个轴方向上具有灵敏度的磁传感器,例如也可以采用在车宽方向、行进方向和铅垂方向这三个轴方向上具有灵敏度的磁传感器。若利用在多个轴方向上具有灵敏度的磁传感器,就能够与磁的大小一起测量磁的作用方向,能够生成磁向量。也可以利用磁向量的差分、该差分的行进方向的变化率来实现磁性标识器10的检测精度的提高。
(实施例2)
本例是基于实施例1的磁性标识器系统1来变更用于决定磁性标识器10的配置间距的条件的示例。关于该内容,参照图13以及图14进行说明。
在本例的磁性标识器系统中,为了选择性地设定配置间距,利用表示传感器输出波形与正弦波的类似程度的指标值。作为指标值,例如,能够利用传感器输出波形与正弦波的相关系数、传感器输出波形与正弦波的误差量等。
例如,作为相关系数,能够利用图13a的一周期的量的传感器输出波形的采样数据即数据序列xi(数据数是n)与图13b的一周期的量的正弦波的采样数据即数据序列yi(数据数是n)的相关系数。这里,图13b的正弦波是相对于要对相关进行调查的对象的图13a的传感器输出波形使位相以及周期一致的波,且零交叉的间隔以及位置一致。另外,图13a中例示出配置间距=50cm时的传感器输出波形。
图13a的传感器输出波形的数据序列xi与图13b的正弦波的数据序列yi的相关系数r例如能够通过下式来运算。这里,Sxy是数据序列xi与数据序列yi的协方差,Sx是数据序列xi的标准偏差,Sy是数据序列yi的标准偏差。xav是数据序列xi的平均值,yav是数据序列yi的平均值。
[数学表达式1]

在此,



若传感器输出波形是完全的正弦波,则上述的相关系数r就成为1。若传感器输出波形与正弦波的差异变大,则相关系数r就逐渐变小。如图14a以及图14b所示那样,在传感器输出波形与正弦波的差异大且相关系数r低的情况下,具有作用于磁传感器2的磁场变弱且传感器输出变小的倾向。此外,即使传感器输出波形接近于正弦波的波形且相关系数r大致为1,若配置间距过短,则传感器输出也会变小。因此,例如也可以将在实现相关系数r为0.8等阈值以上的配置间距的范围(图14中所示的高相关范围)当中最长的配置间距设定为铺设磁性标识器10时的配置间距。例如,在相关系数r为0.8等阈值以上时,可以判断为传感器输出波形呈现正弦波。这里,传感器输出波形相当于作用于传感器的磁场的强度(磁的大小)的分布。
另外,作为与上述的相关系数r相关的阈值,例如设定0.9,在相关系数r为阈值以上时,可以判断为传感器输出波形呈现正弦波。在该情况下,例如与阈值为0.8的情况相比较,能够更严格地判断传感器输出波形与正弦波的一致度。进而,以将相关系数r大致为1而另一方面配置间距过短从而传感器输出变小的配置间距的设定排除于未然作为目的,作为相关系数r的范围,例如可以设定0.8以上且不足0.9的范围、0.9以上且不足0.95的范围等。如此地,若将比1小的阈值设定为相关系数r的上限,就能够将传感器输出变小这样的窄配置间距排除于未然。
另外,关于为了运算相关系数r而需要的传感器输出波形,能够通过模拟计算来求取。或者,也可以例如设置排列有10个左右磁性标识器10的试验区间,通过该试验区间的磁传感器2的实际测量来取得传感器输出波形的数据序列xi。关于正弦波的数据值,能够通过运算等来求取。
在本例中,作为表征传感器输出波形与正弦波的类似程度的指标值,例示出传感器输出波形与正弦波的相关系数r。作为该指标值,例如,也可以采用传感器输出波形与归一化后的正弦波的最小平方误差的总和等误差量。该误差量越小,则传感器输出波形与正弦波的类似度就越高。可以对该误差量进行阈值处理,在误差量比预先设定的阈值少时,判断为传感器输出波形呈现正弦波的波形。
另外,例如在对安装高度为20cm的磁传感器的传感器输出波形和装高度为10cm的情况下的传感器输出波形进行比较时,有时装高度为20cm的情况下的传感器输出波形成为平滑的波形并接近于正弦波形。这是由于装高度为20cm的情况下的磁性标识器与磁传感器的间隔是适度的。因此,关于用于判断传感器输出波形是否接近于正弦波形的阈值处理,可以对应于磁传感器的安装高度来变更阈值处理的判断条件。例如,在磁传感器的安装高度低的情况下,与该安装高度高的情况相比,可以缓和上述的阈值处理的判断条件。
另外,关于其他的结构以及作用效果,与实施例1是同样的。
以上,详细说明了如实施例那样的本发明的具体例,但这些具体例只不过公开了专利权利要求书所包含的技术的一例。当然并不应通过具体例的结构、数值等来限定性地解释专利权利要求书。专利权利要求书包含利用公知技术、本领域技术人员的知识等对所述具体例多样地进行变形、变更或者适当组合而成的技术。
附图标记的说明
1 磁性标识器系统
10 磁性标识器
11 磁铁片
2 磁传感器
21 MI元件
211 非晶丝(磁敏体)
213 拾波线圈
23 脉冲电路
231 脉冲发生器
5 车辆
53 路面
530 车道
Claims (5)
1.一种磁性标识器系统,为了实现用于进行驾驶者对车辆的驾驶操作的辅助、或者不依赖于驾驶者的操作的自动驾驶的车辆控制,包含沿着道路铺设以使得能在车辆侧的磁传感器进行检测的磁性标识器,
所述磁性标识器系统的特征在于,
所述磁性标识器铺设成沿着道路使磁极的朝向交替反转,并且配置成使得沿着道路空出间隙地相邻的磁性标识器的磁场发生干扰。
2.根据权利要求1所述的磁性标识器系统,其中,
沿着道路相邻的两个磁性标识器作用于车辆侧的磁的大小沿着道路呈现正弦波形的分布。
3.根据权利要求1或2所述的磁性标识器系统,其中,
沿着道路铺设的所述磁性标识器的间隔即配置间距是与在车辆侧设想的所述磁传感器的安装高度的不足2倍相当的长度。
4.根据权利要求1~3中任一项所述的磁性标识器系统,其中,
沿着道路相邻的两个所述磁性标识器的间隙的长度是与在车辆侧设想的所述磁传感器的安装高度的1/3倍以上且不足1倍相当的长度。
5.根据权利要求1~4中任一项所述的磁性标识器系统,其中,
在沿着道路铺设的磁性标识器的至少一部分磁性标识器上,附设有提供供该磁性标识器的确定用的信息的信息提供部。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018188906A JP7255127B2 (ja) | 2018-10-04 | 2018-10-04 | 磁気マーカシステム |
| JP2018-188906 | 2018-10-04 | ||
| PCT/JP2019/037366 WO2020071182A1 (ja) | 2018-10-04 | 2019-09-24 | 磁気マーカシステム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN112753054A true CN112753054A (zh) | 2021-05-04 |
Family
ID=70054522
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201980062795.XA Pending CN112753054A (zh) | 2018-10-04 | 2019-09-24 | 磁性标识器系统 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US20210340715A1 (zh) |
| EP (1) | EP3862988B1 (zh) |
| JP (2) | JP7255127B2 (zh) |
| CN (1) | CN112753054A (zh) |
| SG (1) | SG11202103384SA (zh) |
| WO (1) | WO2020071182A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112431148A (zh) * | 2020-11-30 | 2021-03-02 | 王健 | 适用于智能车辆自动驾驶的定向指示道路交通设施 |
| US11294090B2 (en) * | 2017-03-28 | 2022-04-05 | Aichi Steel Corporation | Marker detection system and marker detection method |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6965815B2 (ja) * | 2018-04-12 | 2021-11-10 | 愛知製鋼株式会社 | マーカ検出システム、及びマーカ検出システムの運用方法 |
| US11604476B1 (en) | 2018-10-05 | 2023-03-14 | Glydways Inc. | Road-based vehicle guidance system |
| US11862014B2 (en) * | 2018-12-28 | 2024-01-02 | Aichi Steel Corporation | Magnetic marker system |
| CN114249078A (zh) * | 2021-12-10 | 2022-03-29 | 广东智源机器人科技有限公司 | 轨道标识定位方法 |
| WO2023243617A1 (ja) * | 2022-06-14 | 2023-12-21 | 愛知製鋼株式会社 | 磁気マーカ、車両用システム及びマーカ検出方法 |
Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06265615A (ja) * | 1993-03-16 | 1994-09-22 | Mazda Motor Corp | 路上情報検知装置 |
| CN1272174A (zh) * | 1997-09-29 | 2000-11-01 | 爱知制钢株式会社 | 磁性式车辆位置检测装置 |
| JP2001125638A (ja) * | 1999-10-22 | 2001-05-11 | Toyota Motor Corp | 磁性体の設置方法、磁性式標識体及び車両用情報取得装置 |
| JP2001167389A (ja) * | 1999-12-10 | 2001-06-22 | Hino Motors Ltd | 車両の位置検出装置 |
| JP2001325697A (ja) * | 2000-05-15 | 2001-11-22 | Denso Corp | 磁石式マーカ検出システム及び磁石式マーカ検出装置並びに記録媒体 |
| US20020022926A1 (en) * | 2000-08-21 | 2002-02-21 | Jun Suzuki | Vehicle traveling position detecting system |
| JP2002260154A (ja) * | 2001-03-05 | 2002-09-13 | Natl Inst For Land & Infrastructure Management Mlit | レーンマーカシステム |
| JP2005202478A (ja) * | 2004-01-13 | 2005-07-28 | Denso Corp | 車両用自動走行システム |
| CN1848339A (zh) * | 2005-04-08 | 2006-10-18 | 富士电机机器制御株式会社 | 磁性接近开关 |
| CN1965339A (zh) * | 2004-06-02 | 2007-05-16 | 国家科研中心 | 用于基础设施、移动物体协作的驾驶辅助系统 |
| CN102177418A (zh) * | 2008-10-10 | 2011-09-07 | 法雷奥电机设备公司 | 产生正弦信号的用于确定角度位置的磁性装置及包括这种装置的多相旋转电机 |
| CN102194273A (zh) * | 2010-02-05 | 2011-09-21 | 日本电产三协株式会社 | 磁性传感器装置 |
| CN106601098A (zh) * | 2017-01-01 | 2017-04-26 | 重庆科技学院 | 一种小型静磁场实验装置的使用方法 |
| WO2017187881A1 (ja) * | 2016-04-28 | 2017-11-02 | 愛知製鋼株式会社 | 運転支援システム |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3609678A (en) * | 1969-04-28 | 1971-09-28 | Minnesota Mining & Mfg | Magnetized means for providing control information to moving vehicles |
| US5347456A (en) * | 1991-05-22 | 1994-09-13 | The Regents Of The University Of California | Intelligent roadway reference system for vehicle lateral guidance and control |
| JPH09128048A (ja) * | 1995-10-31 | 1997-05-16 | Sanyo Electric Co Ltd | 誘導式ゴルフカート |
| JPH10104252A (ja) * | 1996-09-30 | 1998-04-24 | Sumitomo Electric Ind Ltd | スリップ率測定方法 |
| DE10019779A1 (de) * | 2000-04-20 | 2001-10-25 | Volkswagen Ag | Meßfühler |
| US6728629B2 (en) * | 2000-11-24 | 2004-04-27 | National Institute For Land And Infrastructure Management, Ministry Of Land, Infrastructure And Transport | On-road reference point positional data delivery device |
| JP4675528B2 (ja) | 2001-09-27 | 2011-04-27 | クラリオン株式会社 | 道路走行支援方法及び道路走行支援用車載装置 |
| JP5184982B2 (ja) | 2008-06-11 | 2013-04-17 | 富士重工業株式会社 | 自律走行車の走行システム |
| JP6265615B2 (ja) | 2013-03-29 | 2018-01-24 | トヨタホーム株式会社 | 建物の外壁構造 |
| KR101892532B1 (ko) * | 2015-08-06 | 2018-08-28 | 한국생산기술연구원 | 자계 기반 무인 주행 차량의 주행 위치 검출 장치 및 도로정보 제공장치 |
| JP2017078909A (ja) * | 2015-10-19 | 2017-04-27 | 愛知製鋼株式会社 | 磁気マーカ及び磁気マーカ検出システム |
| JP6355607B2 (ja) * | 2015-10-19 | 2018-07-11 | 愛知製鋼株式会社 | 磁気マーカ及び磁気マーカ検出システム |
| CN109661563B (zh) * | 2016-06-03 | 2023-09-01 | 爱知制钢株式会社 | 位置捕捉方法及系统 |
| JP7012421B2 (ja) * | 2016-06-17 | 2022-01-28 | 愛知製鋼株式会社 | 磁気マーカ及びマーカシステム |
-
2018
- 2018-10-04 JP JP2018188906A patent/JP7255127B2/ja active Active
-
2019
- 2019-09-24 WO PCT/JP2019/037366 patent/WO2020071182A1/ja active Search and Examination
- 2019-09-24 US US17/279,618 patent/US20210340715A1/en active Pending
- 2019-09-24 EP EP19868653.7A patent/EP3862988B1/en active Active
- 2019-09-24 CN CN201980062795.XA patent/CN112753054A/zh active Pending
- 2019-09-24 SG SG11202103384SA patent/SG11202103384SA/en unknown
-
2022
- 2022-12-27 JP JP2022210152A patent/JP7460929B2/ja active Active
Patent Citations (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06265615A (ja) * | 1993-03-16 | 1994-09-22 | Mazda Motor Corp | 路上情報検知装置 |
| CN1272174A (zh) * | 1997-09-29 | 2000-11-01 | 爱知制钢株式会社 | 磁性式车辆位置检测装置 |
| JP2001125638A (ja) * | 1999-10-22 | 2001-05-11 | Toyota Motor Corp | 磁性体の設置方法、磁性式標識体及び車両用情報取得装置 |
| JP2001167389A (ja) * | 1999-12-10 | 2001-06-22 | Hino Motors Ltd | 車両の位置検出装置 |
| JP2001325697A (ja) * | 2000-05-15 | 2001-11-22 | Denso Corp | 磁石式マーカ検出システム及び磁石式マーカ検出装置並びに記録媒体 |
| US20020022926A1 (en) * | 2000-08-21 | 2002-02-21 | Jun Suzuki | Vehicle traveling position detecting system |
| JP2002260154A (ja) * | 2001-03-05 | 2002-09-13 | Natl Inst For Land & Infrastructure Management Mlit | レーンマーカシステム |
| JP2005202478A (ja) * | 2004-01-13 | 2005-07-28 | Denso Corp | 車両用自動走行システム |
| CN1965339A (zh) * | 2004-06-02 | 2007-05-16 | 国家科研中心 | 用于基础设施、移动物体协作的驾驶辅助系统 |
| CN1848339A (zh) * | 2005-04-08 | 2006-10-18 | 富士电机机器制御株式会社 | 磁性接近开关 |
| CN102177418A (zh) * | 2008-10-10 | 2011-09-07 | 法雷奥电机设备公司 | 产生正弦信号的用于确定角度位置的磁性装置及包括这种装置的多相旋转电机 |
| CN102194273A (zh) * | 2010-02-05 | 2011-09-21 | 日本电产三协株式会社 | 磁性传感器装置 |
| WO2017187881A1 (ja) * | 2016-04-28 | 2017-11-02 | 愛知製鋼株式会社 | 運転支援システム |
| CN106601098A (zh) * | 2017-01-01 | 2017-04-26 | 重庆科技学院 | 一种小型静磁场实验装置的使用方法 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11294090B2 (en) * | 2017-03-28 | 2022-04-05 | Aichi Steel Corporation | Marker detection system and marker detection method |
| CN112431148A (zh) * | 2020-11-30 | 2021-03-02 | 王健 | 适用于智能车辆自动驾驶的定向指示道路交通设施 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7255127B2 (ja) | 2023-04-11 |
| US20210340715A1 (en) | 2021-11-04 |
| EP3862988A1 (en) | 2021-08-11 |
| WO2020071182A1 (ja) | 2020-04-09 |
| JP7460929B2 (ja) | 2024-04-03 |
| JP2023038222A (ja) | 2023-03-16 |
| SG11202103384SA (en) | 2021-05-28 |
| JP2020057301A (ja) | 2020-04-09 |
| EP3862988B1 (en) | 2024-03-20 |
| EP3862988A4 (en) | 2022-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN112753054A (zh) | 磁性标识器系统 | |
| CN109074731B (zh) | 磁性标识器及驾驶支援系统 | |
| CN109074732B (zh) | 驾驶支援系统 | |
| CN108291945B (zh) | 磁性标记检测方法以及磁性标记检测装置 | |
| EP3509048A1 (en) | Vehicle system and path estimation method | |
| EP3367360B1 (en) | Magnetic marker and magnetic marker detection system | |
| US11175159B2 (en) | Learning system and learning method for vehicles | |
| CN109416545B (zh) | 磁性标记检测系统以及磁性标记检测方法 | |
| JP6733289B2 (ja) | 運転支援システム | |
| US10968581B2 (en) | Magnetic marker and magnetic marker detection system | |
| CN109642783B (zh) | 车辆用的姿态检测系统 | |
| JP6729534B2 (ja) | 磁気マーカ及び磁気マーカ検出システム | |
| JP2017194353A (ja) | 磁気マーカの極性判定方法及び極性判定装置 | |
| EP4318160A1 (en) | Magnetic marker system, and design method for magnetic marker system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination |